Заявленное изобретение относится к области удовлетворения жизненных потребностей человека. Может быть использовано в медицине для реабилитации (восстановления) двигательной активности и амплитуды движений суставов и мышц кистей и пальцев рук, нарушенных вследствие перенесенных человеком травм или заболеваний, например – инсульта, и в области спорта – для целенаправленного развития тонуса и силы мышц кистей и пальцев рук, например альпинистов, скалолазов.
Известно, что последствием перенесённых травм и/или заболеваний очень часто является нарушение двигательной активности и амплитуды движений в суставах, например – лучезапястных, суставах пальцев кистей рук. Нарушения носят характер ограниченной подвижности в суставах, ограничения амплитуды их движений по сравнению с их физиологическими показателями, ослабление тонуса и силы мышц, приводящих в движение кисти и пальцы рук. Эти нарушения существенно ограничивают трудоспособность и ухудшают качество жизни пациента, перенесшего травму и/или заболевание. Вследствие нарушения функции верхних конечностей, пациенты испытывают трудности в самообслуживании и осуществлении повседневной активности. В этой связи особую актуальность приобретает подбор наиболее результативных средств реабилитации пациентов с данной патологией.
Далее в тексте заявителем приведены термины, которые необходимы для облегчения однозначного понимания сущности заявленных материалов и исключения противоречий и/или спорных трактовок при выполнении экспертизы по существу.
Абсолютный энкодер - это датчик положения, подсчитывающий число уникальных цифровых кодов за единицу вращения диска для измерения основных кинематических параметров работы электропривода: скорости и положения вала. [http://www.servotechnica.ru/catalog/type/index.pl?id=139#:~:text=%D0%90%D0%B1%D1%81%D0%BE%D0%BB%D1%8E%D1%82%D0%BD%D1%8B%D0%B5%20%D1%8D%D0%BD%D0%BA%D0%BE%D0%B4%D0%B5%D1%80%D1%8B,%D1%8D%D0%BB%D0%B5%D0%BA%D1%82%D1%80%D0%BE%D0%BF%D1%80%D0%B8%D0%B2%D0%BE%D0%B4%D0%B0%3A%20%D1%81%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D0%B8%20%D0%B8%20%D0%BF%D0%BE%D0%BB%D0%BE%D0%B6%D0%B5%D0%BD%D0%B8%D1%8F%20%D0%B2%D0%B0%D0%BB%D0%B0.]
Кожно–гальваническая реакция (КГР) — биоэлектрическая активность, фиксируемая на поверхности кожи, обусловленная деятельностью потовых желез и выступающая компонентом ориентировочного рефлекса, эмоциональных реакций организма, связанных с работой симпатической нервной системы. Может регистрироваться с любого участка кожи, но обычно используются пальцы и кисти рук или подошв ног. Служит для анализа состояний человека, его эмоционально–волевых и интеллектуальных процессов.
Миосигнал (или электромиограмма (ЭМГ)) — это электрический сигнал, характеризующий биоэлектрическую активность мышц, который регистрируется электродами различного типа: внутримышечными (игольчатые электроды), поверхностные электроды одно- или биполярные. В заявленном техническом решении используются поверхностные электроды.
Пациент – человек с нарушенной естественной подвижностью суставов кистей и/или пальцев рук и/или человек, развивающий силу, тонус, выносливость мышц рук под руководством медицинского персонала или тренера, ради чего подвергаемый процессу реабилитации суставов и мышц кистей и пальцев рук.
Парез — это снижение мышечной силы с ограничением объема произвольных движений.
Сеанс – промежуток времени, в течение которого совершается действие для реабилитации кисти и/или пальцев рук, какая-нибудь работа или часть её.
Тонус мышцы – это упруго-вязкие свойства мышцы, известная степень непроизвольного постоянного мышечного напряжения. Существуют три различных понимания термина тонус мышцы:
1) сопротивление мышцы растягивающим ее силам (Rieger, Spiegel),
2) способность мышцы длительно удерживать ту или другую степень сокращения (Foix),
3) за критерий тонуса мышцы принимается консистенция мышцы [https://big_medicine.academic.ru/7854/%D0%A2%D0%9E%D0%9D%D0%A3%D0%A1].
ЦАП - устройство для преобразования цифрового (обычно двоичного) кода в аналоговый сигнал (ток, напряжение или заряд). Цифро-аналоговые преобразователи являются интерфейсом между дискретным цифровым миром и аналоговыми сигналами.
CPM-терапия (Continuous Passive Motion) — это современный метод лечения травм, относящийся к механотерапии. Continuous Passive Motion в переводе на русский язык означает «непрерывное пассивное движение» («непрерывная пассивная мобилизация»).
Статический режим – в контексте настоящего описания под указанным термином заявитель понимает использование статического метода восстановления - длительную, до 40 минут, фиксацию и удерживание в неподвижном положении кисти или пальцев руки в заявленном тренажере в процессе реабилитации.
Статический метод восстановления разработан на основе сделанному в 2007 году научному открытию. Суть открытия состоит в том, что «под воздействием длительных, многократно повторяющихся и дозированных физических, психических и речевых нагрузок, на грани переносимости их организмом человека происходит ликвидация дефектов нервной системы» (к.м.н. Мышляев С.Ю.) [https://xn--b1afrd4dr4a.xn--p1ai/nauka/scientific-publications/novaya-metodika-i-robotizirovannyy-kompleks-dlya-sportivnoy-reabilitatsii-i-vosstanovleniya-narushen/]. Используя длительные физические статические нагрузки, удается запустить заново процесс регенерации в мозге. Именно электрическое возбуждение в мозге позволяет восстановить несформированные или поврежденные нейроны и связи между ними. Электрический сигнал с «периферии» двигательного, зрительного или слухового анализатора (электрическая регенерация) в процессе реабилитации запускает биологическую регенерацию в «центре», т.е. – пластичность мозга или его структурно-функциональную перестройку. В рамках реабилитации или коррекции нужны дозированные нагрузки (физические упражнения растягивающего характера с отягощением в виде груза), длительные физические статические нагрузки.
Из исследованного уровня техники заявителем выявлены аналоги заявленного технического решения.
Известна полезная модель по патенту RU 147759 «Тренажер для восстановления подвижности пальцев рук». Сущностью является тренажер для восстановления подвижности пальцев рук, содержащий экзоскелет кисти руки с приводами перемещения пальцев экзоскелета и блоком их управления, отличающийся тем, что привод перемещения каждого из пальцев выполнен индивидуальным, а пальцы снабжены средством привлечения внимания пациента, при этом блок управления приводами пальцев выполнен с возможностью подключения к энцефалографическому шлему и содержит последовательно соединенные блок регистрации энцефалограмм, блок анализа энцефалограмм и блок формирования команд на приводы пальцев.
Недостатком известной полезной модели является отсутствие возможности обеспечить сгибание/разгибание пальцев в заранее заданном (по результатам диагностики) угловом диапазоне в пассивном режиме, т.е. отсутствие возможности управляемо дозировать нагрузку на пальцы путем задания угла сгибания пальцев, отсутствие возможности мониторинга динамики восстановления, отсутствие возможности коррекции хода процесса реабилитации, например – с помощью биологической обратной связи, ограничена область применения – только для пальцев руки. Другим недостатком известной полезной модели является также значительная сложность в применении из-за необходимости использования имеющего весьма ограниченное применение – только в лечебных учреждениях – электроэнцефалографического шлема, вследствие чего модель практически не применима в домашних условиях и/или самим излечиваемым пациентом, в том числе потому, что для установки и эксплуатации электроэнцефалографического шлема требуется участие второго специалиста, в дополнение к занимающемуся реабилитацией лечащему врачу.
Известно устройство для непрерывного пассивного движения по патенту US 5327882A [дата подачи 05.05.1993 г., опубликовано 12.07.1994 г.]. Сущностью является устройство непрерывного пассивного движения для терапии руки пациента, содержащее шину, приспособленную для крепления к предплечью и руке пациента, привод, прикрепленный к упомянутой шине, и содержащий двигатель для привода шестереночной передачи, установленного в корпусе, установленном с возможностью вращения шестереночной передачи вдоль первой оси, средство для прикрепления пальцев, продолжающееся от указанного корпуса и приспособленное для поворота относительно него вокруг второй оси, отстоящей от первой оси и параллельной ей, причем указанное средство для прикрепления пальцев приспособлено для крепления, по меньшей мере, к одному из пальцев пациента, причем указанное средство передачи при приведении в действие упомянутого моторного средства, заставляющее упомянутое средство крепления пальцев вращаться в противоположную сторону вокруг упомянутой второй оси и относительно вращения упомянутого корпуса вокруг упомянутой первой оси, посредством чего указанный, по меньшей мере, один палец приводится в движение по обратному пути движения, соответствующему, по меньшей мере, часть сложной спирали.
Недостатками известного устройства являются невысокая эффективность (неудовлетворительная результативность) терапии, выражающаяся в виде неполного восстановления работы пальцев вследствие того, что физиологическое сгибание на данном устройстве производится в неполном (по сравнению с естественным) объёме, поскольку конструкцией тренажера не предусмотрено (не обеспечивается) сгибание межфалангового сустава дистальной и средней фаланги, отсутствует возможность мониторинга динамики восстановления с помощью биологической обратной связи, ограничена область применения – только для пальцев руки. Отсутствие инструментального мониторинга сеанса реабилитации лишает возможности оперативно корректировать параметры, например – углы сгибания пальцев, в ходе процесса.
Известна полезная модель по патенту RU 175324 «Тренажер». Сущностью является тренажер, содержащий блок крепления на руку в виде основания, выполненного с возможностью крепления на наружной стороне предплечья и кисти руки, выполненную с возможностью перемещения часть и соединенные с ней блок привода и средства для крепления пальцев, при этом блок привода содержит двигатель и консоли, установленные с боковых сторон блока привода и направленные в сторону кисти руки, при этом выполненная с возможностью перемещения часть тренажера выполнена в виде двух пар рычагов, расположенных по обе стороны от продольной оси блока привода и шарнирно соединенных с консолями, причем первые рычаги пары выполнены с возможностью перемещения посредством первой зубчатой передачи относительно оси, соединяющей их с концами консолей, а вторые рычаги пары выполнены с возможностью перемещения посредством второй зубчатой передачи относительно оси, соединяющей их с концами первых рычагов, при этом между свободными концами вторых рычагов жестко установлена ось, на которой смонтированы средства для крепления пальцев, выполненные в виде четырех цепочек шарнирно соединенных звеньев, причем на свободных концах цепочек установлены держатели пальцев, а звенья выполнены с отверстиями с возможностью размещения в них, по меньшей мере, двух тросов, при этом длина троса, размещенного ближе к пальцу, меньше длины троса, размещенного на большем расстоянии от пальца, согласно полезной модели блок привода выполнен с возможностью перемещения над основанием по жестко установленной в его передней части направляющей, а двигатель блока привода соединен с установленным с возможностью вращения валом посредством третьей зубчатой передачи и датчиком угла положения тренажера посредством четвертой зубчатой передачи. При этом, согласно описанию полезной модели, датчик угла положения тренажера может быть выполнен в виде датчика, основанного на эффекте Холла.
Недостатком известного технического решения является отсутствие возможности обеспечения сгибания/разгибания пальцев в заранее заданном (согласно результатам диагностики) угловом диапазоне в пассивном режиме, то есть отсутствие возможности дозировать нагрузку на пальцы – тем самым восстановить силу мышц пальцев – путем задания угла сгибания пальцев, отсутствие возможности мониторинга динамики восстановления и коррекции процесса восстановления с помощью биологической обратной связи, ограниченность области применения – только для суставов пальцев рук (но не кистей рук!).
Наиболее близким по количеству общих признаков и заявленному техническому результату, выбранным заявителем в качестве прототипа, является изобретение авторов заявленного технического решения по патенту RU 2720323 «Тренажер с биологической обратной связью для реабилитации кистей и пальцев рук».
Сущностью прототипа является тренажер, состоящий из модуля управления, выполненного в виде полого пластикового корпуса, фиксируемого на предплечье пациента, модуля двигателя сгибания/разгибания кисти руки, отличающийся тем, что дополнительно оснащен шаговым двигателем для сгибания/разгибания кисти руки, модулем управления с расположенным в модуле управляющим микроконтроллером, контроллером шагового двигателя для сгибания/разгибания кисти и контроллером для управления сервоприводом, Bluetooth-модулем связи с входящим в комплект тренажера компьютером, модулем сенсора кожно-гальванической реакции организма пациента, двух модулей миосенсоров, модуля преобразователя напряжения питания для шагового двигателя, автономными, независимыми от электросети источниками электропитания для питания всех электронных компонент и модулей тренажера, подключаемым в Интернет компьютером с установленным на нём специально разработанным программным обеспечением, модулем двигателя для сгибания/ разгибания пальцев кисти руки с содержащим обеспечивающий управляемое принудительное сгибание/разгибание пальцев кисти руки сервопривод, перчаткой для фиксации кисти руки на модуле сгибания пальцев кисти руки, оснащенной расположенными внутри пальцев перчатки датчиками давления пальцев кисти руки.
Недостатками прототипа по сравнению с заявленным техническим решением являются:
1 – невозможность проведения реабилитации в статическом режиме без снижения нагрузки на кисть руки пациента в течение длительного времени ввиду отсутствия модуля управления током шагового двигателя сгибания/разгибания кисти руки и отсутствия использования абсолютного энкодера в цепи обратной связи.
2 – неэффективная реабилитация в динамическом режиме ввиду отсутствия модуля управления током шагового двигателя сгибания/разгибания кисти руки и отсутствия использования абсолютного энкодера в цепи обратной связи, так как отсутствует постоянная оперативная обратная связь по нагрузке на кисть и пальцы руки пациента, что не позволяет оперативно и с высокой точностью контролировать движение кисти и пальцев руки.
3 – перегрев шагового двигателя при работе в статистическом режиме. Тестовая эксплуатация прототипа, авторами которого являются авторы заявленного технического решения, показала, что в процессе проведении сеансов реабилитации в статическом режиме, после доведения кисти ладони до требуемого положения (угла), кисть должна быть зафиксирована в этом положении до 40 минут в зависимости от назначения врача. Однако уже через 10 минут шаговый двигатель нагревается до 80 градусов и выше, так как ток управления шаговым двигателем остается неизменным и достаточно высоким, что приводит к перегреву как шагового двигателя, так и контроллера шагового двигателя. Дальнейшее удержание руки в данном режиме становится сложным, а, соответственно, и использование прототипа для выполнения сеансов реабилитации в статическом режиме становится затрудненным.
4 – неэффективное, не экономичное использование автономных источников электропитания, так как ток потребления шаговым двигателем модуля двигателя для сгибания/разгибания кисти руки не зависит от реальной нагрузки и всегда постоянен;
5 - модуль двигателя для сгибания/разгибания кисти руки, содержащий шаговый двигатель с металлическим редуктором, размещен на внешней стороне за продольной осью предплечья, вследствие чего происходит перевешивание и «выворачивание» предплечья руки на внешнюю сторону под весом двигателя и пациенту приходится прилагать существенное, быстро утомляющее усилие для удержания предплечья в горизонтальном положении, что утомляет пациента;
6 – приложение дополнительных усилий для удержания предплечья в горизонтальном положении из-за особенности расположения модуля двигателя (и сервопривода) - на внешней стороне конца вытянутой ладони руки;
7 – дополнительные затраты времени в процессе подготовки пациента к проведению сеанса реабилитации, так как фиксацию пальцев перчатки на подложке фиксации пальцев перчатки проводят с помощью крепежных винтов в отличие от т-образного штыря в пластиковом фиксаторе пальцев и запорной планки для фиксации пальцев перчатки на подложке в заявленном техническом решении;
8 – меньший контакт миосенсоров с кожной поверхностью предплечья по сравнению с заявленным техническим решением, так как чувствительные элементы миосенсоров закреплены на внутренней стороне модуля управления, что, в свою очередь, приводит к слабому (неоптимальному) контакту миосенсоров с поверхностью кожи предплечья, что снижает уровень снимаемого с поверхности кожи предплечья электрического сигнала активности мышц, а, соответственно, и менее точному определению степени улучшения/ухудшения процесса реабилитации в сторону увеличения/уменьшения времени реабилитации;
9 – неравномерное распределение нагрузки на подложку, ненадежная работа тренажера, так как крепление подложки для фиксации пальцев расположено только с одной стороны (к модулю двигателя сгибания пальцев руки), и «свободно висит» с другой стороны при проведении сеанса реабилитации пальцев кисти руки в пассивном и полуактивном режимах, что может привести к зажиму в месте крепления подложки к модулю двигателя сгибания пальцев руки и, как следствие, к значительному повышению сопротивления при вращении подложки, вплоть до полного останова вращения подложки (заклиниванию);
10 – пациенту трудно удерживать руку с зафиксированным на ней тренажером на весу в положении сидя или лежа в течение 30-40 минут при выполнении реабилитационных упражнений ввиду отсутствия упора.
Целью создания заявленного технического решения является повышение эксплуатационной надежности, улучшение эргономических свойств тренажера, расширение перечня и области применения средств реабилитации естественной подвижности суставов рук, суставов кистей и пальцев/или отдельного пальца рук, тонуса и силы мышц рук, кистей и пальцев рук, утраченных вследствие болезни и/или травмы, повышение удобства эксплуатации тренажера.
Техническим результатом заявленного технического решения является устранение недостатков прототипа, а именно:
1 – возможность проведения реабилитации в статическом режиме без снижения нагрузки на кисть руки пациента в течение длительного времени в результате дополнительного введения модуля управления током шагового двигателя сгибания/разгибания кисти руки и использования абсолютного энкодера в цепи обратной связи, который (абсолютный энкодер) позволяет выявлять признаки торможения шагового двигателя при увеличении нагрузки путем определения пропусков шагов шагового двигателя, а написанное программное обеспечение путем анализа данных, полученных с абсолютного энкодера, формирует сигнал микроконтроллера, поступающий на модуль управления током шагового двигателя, увеличивая его мощность, что позволяет оперативно и с высокой точностью выравнивать статическую нагрузку на кисть руки пациента через модуль управления током шагового двигателя.
2 – возможность более эффективной реабилитации в динамическом режиме, так как в результате введения модуля управления током шагового двигателя сгибания/разгибания кисти руки и использования абсолютного энкодера в цепи обратной связи обеспечивается постоянная оперативная обратная связь по нагрузке на кисть и пальцы руки пациента, что позволяет оперативно и с высокой точностью контролировать движение кисти и пальцев руки.
3 - устранение перегрева шагового двигателя в статическом режиме в результате введения модуля управления током шагового двигателя сгибания/разгибания кисти руки, который в статическом режиме при достижении заданного программным обеспечением положения кисти автоматически устанавливает необходимый для удержания минимальный ток шагового двигателя, что, в свою очередь, предохраняет шаговый двигатель от перегрева и, таким образом, позволяет проводить длительную реабилитацию;
4 - более эффективное использование автономных источников электропитания в результате введения модуля управления током шагового двигателя сгибания/разгибания кисти руки, в результате чего:
- в статическом режиме при достижении заданного программным обеспечением положения кисти автоматически устанавливается необходимый для удержания минимальный ток шагового двигателя, при этом при обратном движении кисти вниз ток снижают до минимума вследствие отсутствия сопротивления движения руки при ее ходе вниз;
- в динамическом режиме обеспечивается зависимость тока потребления шаговым двигателем модуля двигателя для сгибания/разгибания кисти руки от реальной нагрузки - ток уменьшается в случае уменьшения нагрузки и, соответственно, увеличивается в случае большого сопротивления движению;
5 – уменьшение перевешивания и «выворачивания» предплечья руки пациента на внешнюю сторону под весом двигателя путем оптимального размещения модуля двигателя для сгибания/разгибания кисти руки, содержащего шаговый двигатель с металлическим редуктором, на внешней стороне посередине продольной оси предплечья, кроме того, благодаря дополнительному редуктору уменьшается вес двигателя, так как использован менее мощный шаговый двигатель меньшего размера и планетарный редуктор при сохранении прежних технических характеристик (силы крутящего момента)
6 – дополнительная устойчивость положения предплечья пациента благодаря использованию второго шагового двигателя в модуле двигателя для сгибания/разгибания пальцев кисти руки, расположенного практически на предплечье руки, вместо использованного в прототипе сервопривода, расположенного на конце вытянутой ладони руки, что снижает вес нагрузки и увеличивает силу крутящего момента на оси шестерни, к которой закреплена подложка фиксации пальцев перчатки;
7 – ускорение и удобство процесса подготовки пациента к сеансу реабилитации путем использования т-образного штыря в пластиковом фиксаторе пальцев и запорной планки для фиксации пальцев перчатки на подложке, вместо крепежных винтов у прототипа;
8 – обеспечение лучшего контакта миосенсоров с кожной поверхностью предплечья пациента благодаря использованию браслета из мягкой ткани, опоясывающего предплечье пациента чуть выше расположенного модуля тренажера на предплечье пациента, фиксируемого (браслет) с помощью ленты-липучки, что (лучший контакт миосенсоров с кожной поверхностью) в конечном итоге приводит к более точному определению степени улучшения/ухудшения процесса реабилитации в сторону увеличения/уменьшения времени реабилитации;
9 – равномерное распределение нагрузки на подложку для фиксации пальцев, обеспечение надежной работы тренажера путем использования П-образной конструкции для крепления подложки для фиксации пальцев с использованием модуля дополнительного крепления подложки для фиксации пальцев;
10 – обеспечение возможности не держать руку с зафиксированным на ней тренажером на весу в положении сидя или лежа в течение 30-40 минут при выполнении реабилитационных упражнений за счет разработки выдвигаемого (устанавливаемого) в случае необходимости упора тренажера на стол/кровать, выполненного, например, из толстой металлической проволоки.
При этом при использовании заявленного тренажера, так же, как и в прототипе, обеспечено дистанционное (на удалении) управление процессом реабилитации лечащим специалистом, что обеспечивает возможность одному лечащему специалисту после предварительной диагностики одновременно управлять процессами реабилитации нескольких пациентов, что существенно повысит производительность труда лечащих специалистов.
Сущностью заявленного технического решения является тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук, состоящий из:
модуля управления, выполненного в виде полого пластикового корпуса, фиксируемого на предплечье пациента, в котором расположены управляющий микроконтроллер, контроллер шагового двигателя для сгибания/разгибания кисти руки, Bluetooth- модуль связи с входящим в комплект тренажера компьютером;
модуля повышающего преобразователя напряжения для питания шаговых двигателей, автономных, независимых от электросети источников электропитания для питания всех электронных компонент и модулей тренажера;
модуля двигателя сгибания/разгибания кисти руки, оснащенного шаговым двигателем;
модуля двигателя сгибания/разгибания пальцев руки;
датчиков контроля кожно-гальванической реакции организма;
перчатки для фиксации кисти руки на модуле сгибания/разгибания пальцев руки, оснащенной расположенными внутри пальцев датчиками усилия давления пальцев руки;
подключаемого в Интернет компьютера с установленным на нём разработанным программным обеспечением,
характеризующийся тем, что
модуль управления дополнительно содержит модуль управления током шагового двигателя сгибания/разгибания кисти руки, контроллер шагового двигателя сгибания/разгибания пальцев руки, блок питания для микроконтроллера и для внешних подключаемых датчиков - миосенсоров, датчиков контроля кожно-гальванической реакции организма;
модуль двигателя сгибания/разгибания кисти руки расположен сверху по центру продольной оси кисти руки и дополнительно содержит цилиндрический редуктор и абсолютный энкодер;
модуль двигателя сгибания/разгибания пальцев руки дополнительно содержит второй шаговый двигатель и модуль дополнительного крепления подложки фиксации пальцев руки;
перчатка для фиксации кисти руки содержит пластиковый фиксатор пальцев с т-образным штырем и запорной планкой для фиксации пальцев перчатки на подложке, а также резистор изгиба, вшитый в указательный палец перчатки с возможностью его использования в качестве абсолютного энкодера для измерения угла сгибания пальцев руки;
при этом тренажер дополнительно содержит браслет из мягкой ткани с вшитыми в него двумя миосенсорами, фиксируемый на предплечье с помощью ленты-липучки,
и упор тренажера на стол/кровать в состоянии пациента сидя/лежа.
Заявленное техническое решение иллюстрируется Фиг.1 – Фиг.15.
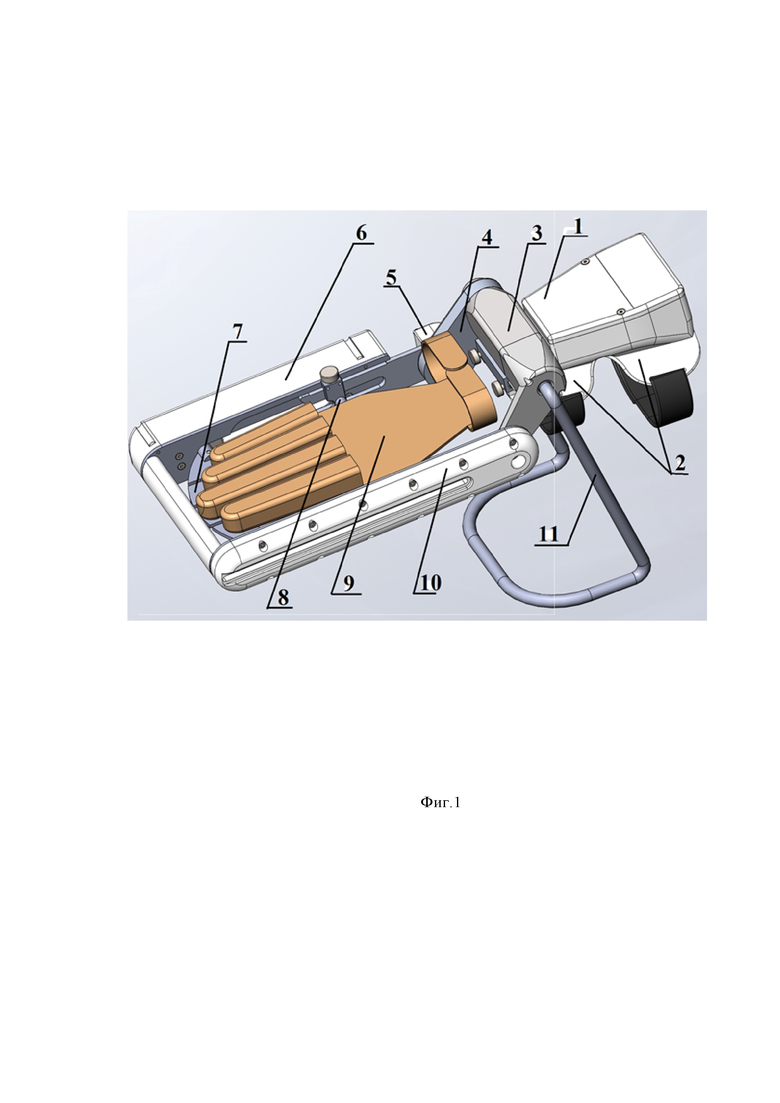
На Фиг.1 представлен электронно-механический блок заявленного тренажера в сборе, вид слева.
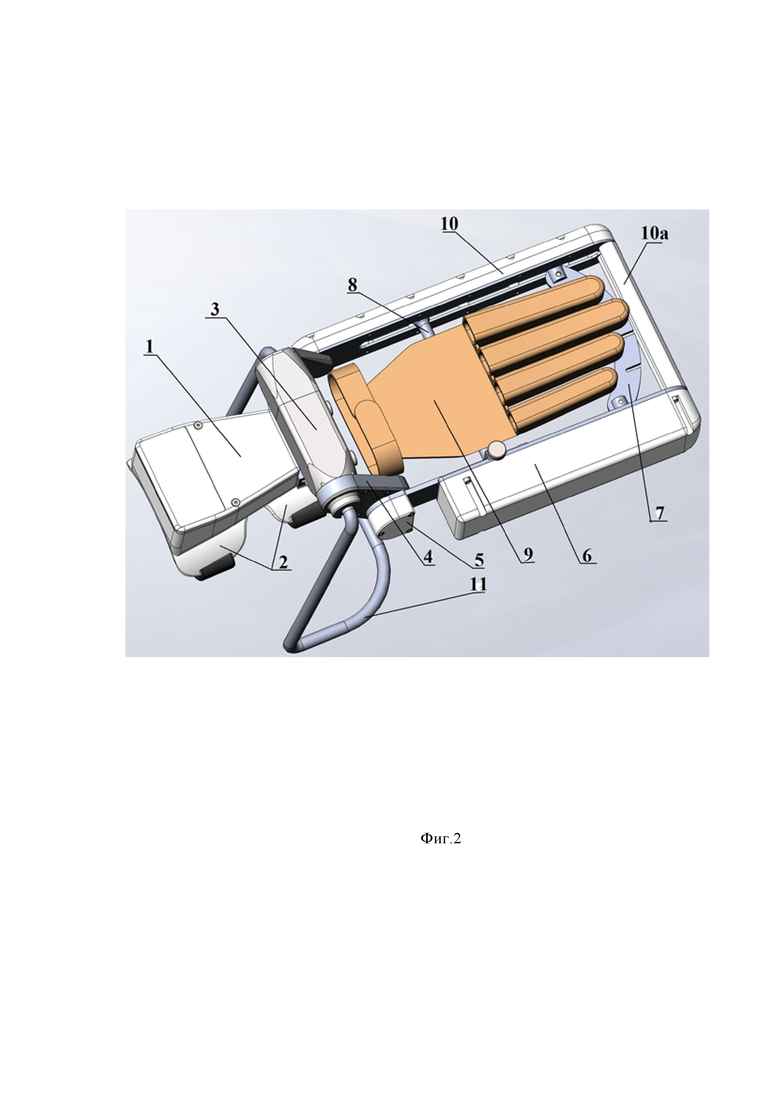
На Фиг.2 представлен электронно-механический блок заявленного тренажера в сборе, вид справа.
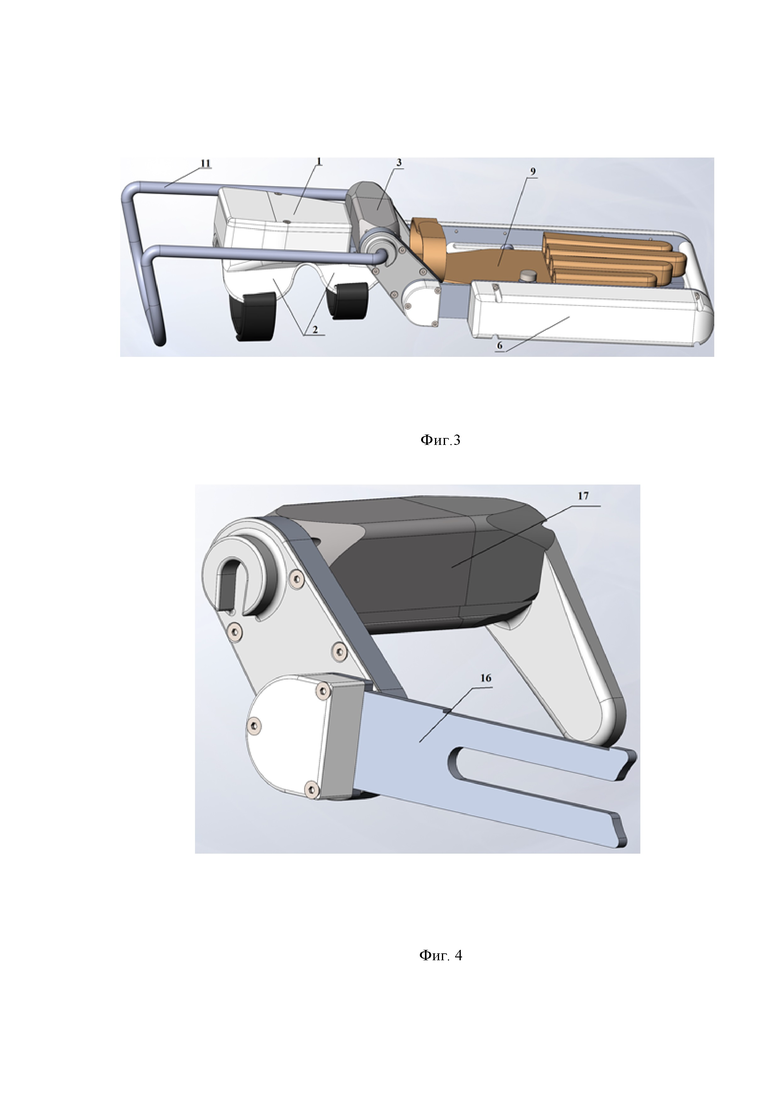
На Фиг.3 представлен электронно-механический блок заявленного тренажера в сборе, с убранным упором;
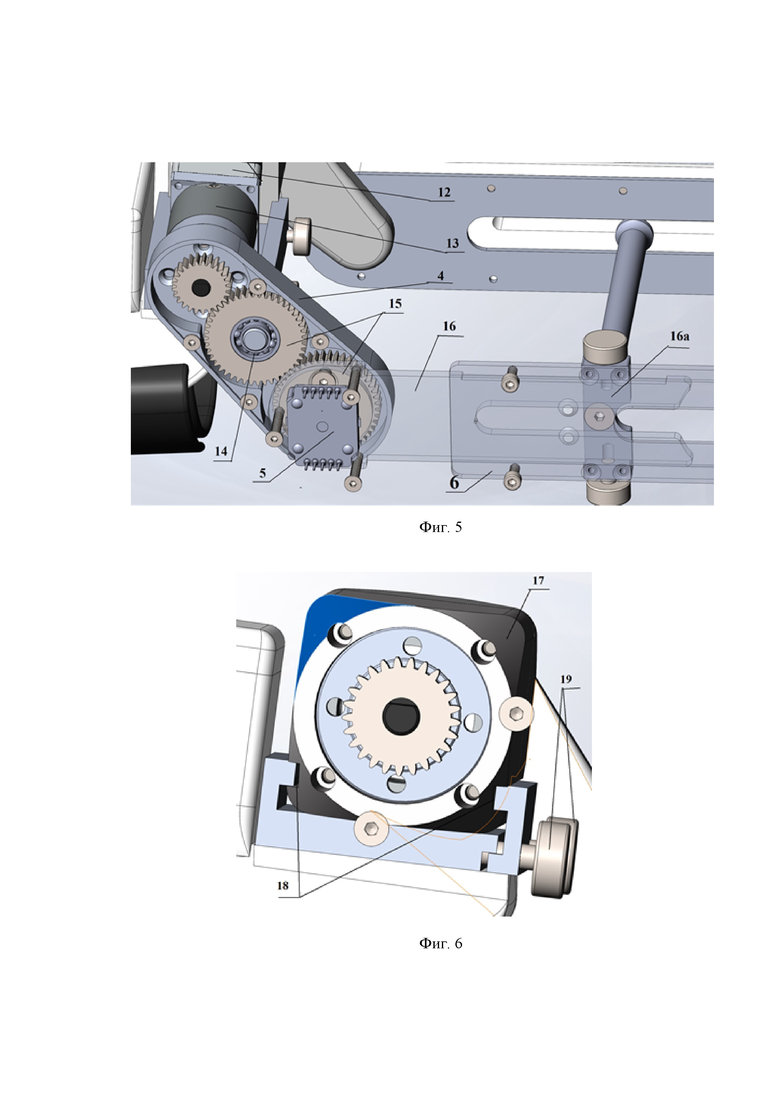
На Фиг.4 представлен модуль двигателя сгибания/разгибания кисти руки;
На Фиг.5 представлен механизм добавочного цилиндрического редуктора 4 модуля двигателя сгибания/разгибания кисти руки 3 (Фиг.1);
На Фиг.6 представлен метод крепления модуля двигателя сгибания/разгибания кисти руки к модулю управления 1 (Фиг.1);
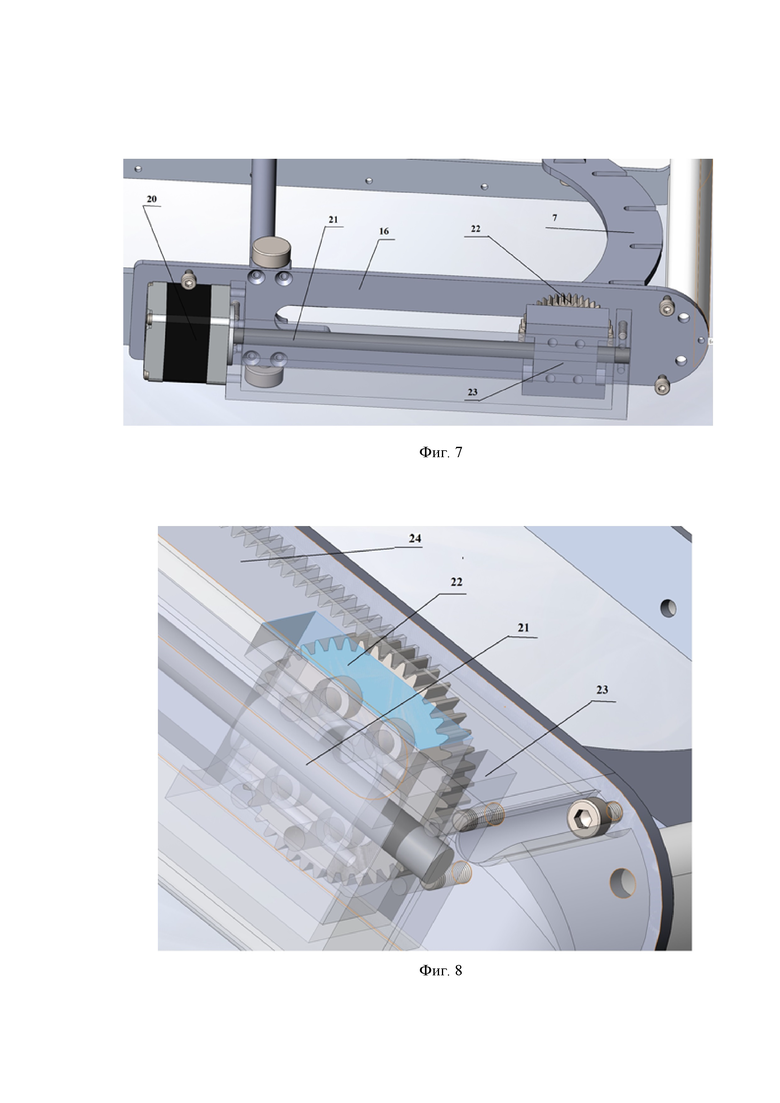
На Фиг.7 представлена конструкция модуля двигателя сгибания/разгибания кисти руки;
На Фиг.8 представлен механизм передачи вращательного движения оси шагового двигателя 20 (Фиг. 7) во вращательное движение шестерни 22 модуля двигателя сгибания/разгибания пальцев руки;
На Фиг.9 представлен принцип передачи вращательного движения поперечной подложке фиксации пальцев 7 одеваемой на руку перчатки 9 (Фиг. 1) модуля двигателя сгибания/разгибания пальцев руки;
На Фиг. 10 представлена зафиксированная на подложке фиксации пальцев перчатка (показан для примера один зафиксированный указательный палец);
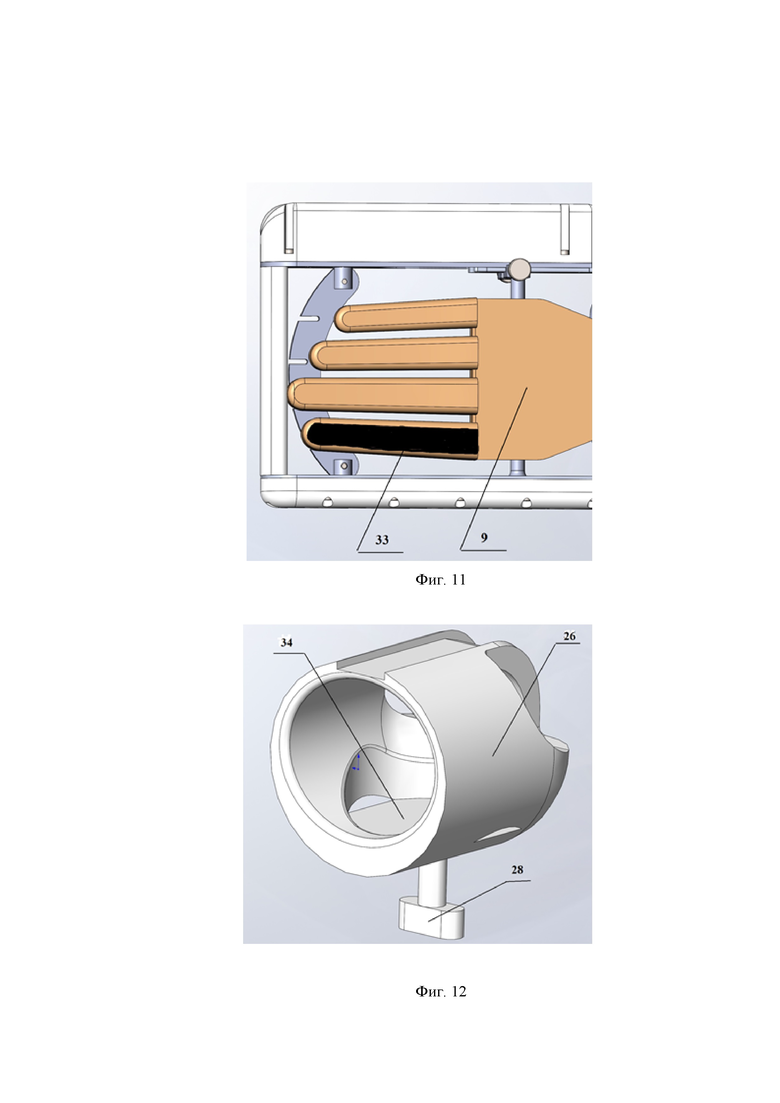
На Фиг. 11 представлена зафиксированная на подложке фиксации пальцев перчатка (вид сверху);
На Фиг. 12 представлен пластиковый фиксатор пальцев;
На Фиг. 13 представлен сменный модуль сгибания кисти руки вправо/ влево;
На Фиг. 14 представлена блок-схема подключения модуля управления током шагового двигателя сгибания/разгибания кисти руки к плате управляющего микроконтроллера с микроконтроллером;
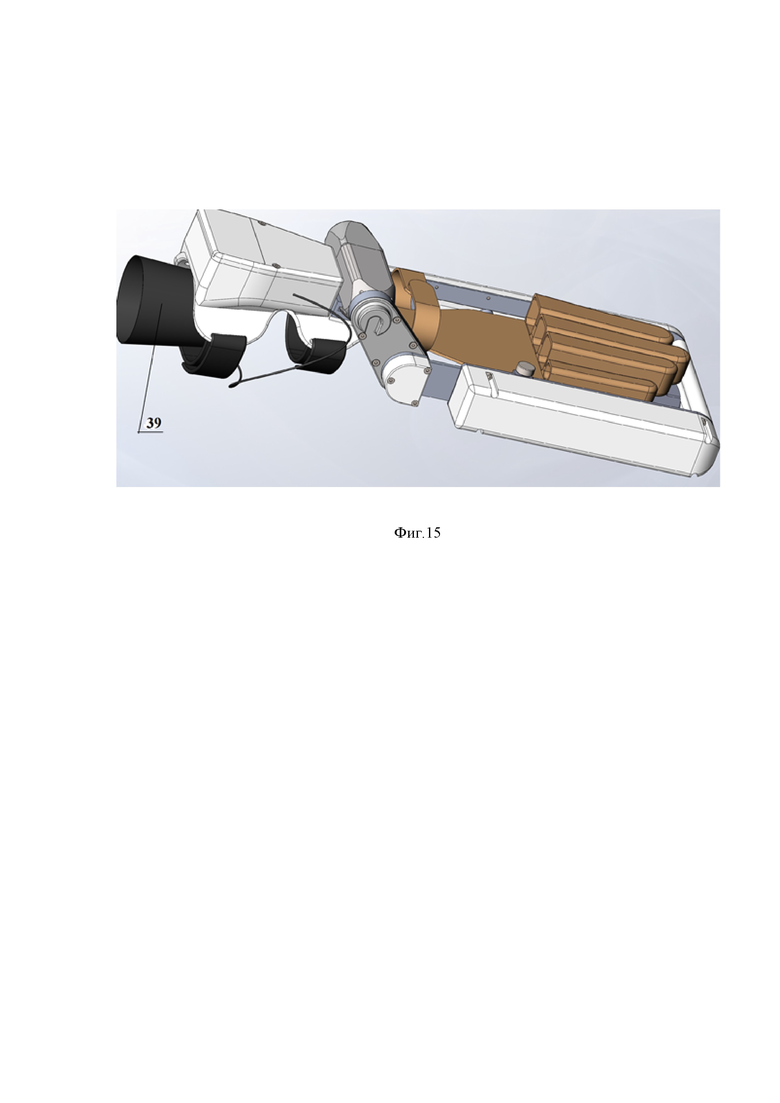
На Фиг. 15 представлен браслет из мягкой ткани, фиксируемый на предплечье с помощью липучки с вшитыми в него двумя миосенсорами.
Позиции на Фиг.1- Фиг.15 обозначают:
1 – модуль управления,
2 – ушки для ремней крепления тренажера на предплечье,
3 – модуль двигателя сгибания/разгибания кисти руки,
4 – цилиндрический редуктор модуля 3,
5 – абсолютный энкодер измерения угла сгибания кисти руки,
6 – модуль двигателя сгибания/разгибания пальцев руки,
7 – подложка для фиксации пальцев одеваемой на руку перчатки,
8 – суппорт-фиксатор кисти руки,
9 – перчатка для фиксации пальцев кисти руки на подложке,
10 – модуль дополнительного крепления подложки для фиксации пальцев,
10а – поперечная планка модуля дополнительного крепления подложки для фиксации пальцев,
11 – упор тренажера на стол/кровать в состоянии пациента сидя/лежа, присоединяемый и выдвигаемый в случае необходимости,
12 – шаговый двигатель сгибания/разгибания кисти руки,
13 – планетарный редуктор,
14 – подшипники для каждой из двух шестерен редуктора,
15 – шестерни редуктора 4 модуля 3 для передачи вращательного момента от шагового двигателя 12 к планке 16 с зафиксированной на ней модулем двигателя сгибания/разгибания кисти руки 6 и подложки 7 для фиксации пальцев одеваемой на руку перчатки,
16 – планка (обеспечивает регулировку по длине, в зависимости от размера ладони), с зафиксированным на ней модулем 6,
16а – винт с накаткой, фиксирующий регулировку по длине,
17 – пластиковый корпус шагового двигателя с планетарным редуктором,
18 – пазы в пластиковом корпусе 17 шагового двигателя с планетарным редуктором,
19 – винты крепления модуля двигателя сгибания/разгибания кисти руки на подложке тренажера,
20 – шаговый двигатель модуля сгибания/разгибания пальцев руки,
21 – ось шагового двигателя с резьбой трапецеидального профиля - направляющий ходовой винт,
22 – шестерня привода подложки для фиксации пальцев одеваемой на руку перчатки,
23 – блок-гайка для крепления шестерни,
24 – рейка-шестерня,
25 – ось шестерни 22 для крепления суппорта-фиксатора кисти руки,
26 – фиксатор пальца, выполненный в виде пластикового наконечника, вставленного внутрь конца пальцев перчатки,
27 – пазы для установки фиксатора пальцев,
28 – т-образный штырь крепления фиксатора пальца,
29 – запорная планка для фиксации пальцев перчатки на подложке,
30 – ушко для ленты-липучки для фиксации запорной планки,
31 и 32 – винты крепления планки для фиксации пальцев перчатки на подложке,
33 – резистор изгиба, вшитый в указательный палец перчатки и используемый в качестве абсолютного энкодера для измерения угла сгибания пальцев кисти руки,
34 – углубление для датчика давления,
35 – сменный модуль сгибания кисти вправо/влево,
36 – плата управляющего микроконтроллера с микроконтроллером,
37 – модуль управления током шагового двигателя сгибания/разгибания кисти руки,
38 – контроллер шагового двигателя сгибания/разгибания кисти руки,
39 – браслет с вшитыми в него двумя миосенсорами.
Датчики поверхностной электромиографии (ЭМГ) и датчик контроля кожно-гальванической реакции организма (КГР) подключаются кабелями и на Фиг. не указаны.
Далее заявителем представлено описание заявленного технического решения.
Функционально заявленный тренажер состоит из двух основных частей, установленных у пациента и лечащего врача соответственно:
1. Оборудование с предварительно установленным программным обеспечением (ПО) у пациента, которое включает:
• электронно-механический блок, включающий в себя:
– модуль управления на базе микроконтроллера, для управления электронно-механическим модулем и выполняющий сбор, обработку объективных данных пациента, полученных с датчиков и передачи этих данных через канал Bluetooth на компьютер пациента;
– модуль двигателя сгибания/разгибания кисти руки с установленным на нем абсолютным энкодером;
– модуль двигателя сгибания/разгибания пальцев руки;
• перчатку для фиксации кисти руки на модуле сгибания пальцев руки, оснащенной расположенными внутри пальцев перчатки датчиками усилия давления пальцев руки;
• набор сенсорных датчиков для обеспечения обратной связи:
– датчики поверхностной электромиографии – миосенсоры (ЭМГ);
– датчик контроля кожно-гальванической реакции организма (КГР);
– датчики усилия давления пальцев руки, например – тензометрических, расположенных в перчатке;
– резистор изгиба, вшитый в указательный палец перчатки и используемый в качестве абсолютного энкодера для измерения угла сгибания пальцев руки;
• упор тренажера на стол/кровать в состоянии пациента сидя/лежа, присоединяемый и выдвигаемый в случае необходимости;
• браслет из мягкой ткани с вшитыми в него двумя миосенсорами, фиксируемый на предплечье с помощью ленты-липучки;
• компьютер с предварительно установленным на нем программным обеспечением и по заданной программе через канал Bluetooth управляющий тренажером, а также (компьютер) посредством сети Интернет (по Wi-Fi) передающий объективные данные пациента управляющему процессом реабилитации медперсоналу, осуществляющему контроль, анализ и корректировку хода процесса реабилитации.
1. Оборудование на стороне лечащего врача, включающее компьютер с базой данных о пациенте.
Далее заявителем более подробно описано перечисленное выше оборудование.
Модуль управления 1 на базе микроконтроллера выполнен в виде полого пластикового корпуса, фиксируемого на предплечье пациента. При этом модуль управления 1 закрепляют на внешней стороне предплечья с помощью ремней на липучке, плотно охватывающих снизу предплечье. Ремни пришиты к четырем ушкам 2 внизу модуля управления 1.
Внутри модуля управления 1 (Фиг.1-3) расположены (на Фиг. не показаны):
- плата управляющего микроконтроллера с микроконтроллером;
- два контроллера шаговых двигателей – один для двигателя сгибания/разгибания кисти руки, другой для двигателя сгибания/разгибания пальцев руки;
- Bluetooth-модуль связи с компьютером;
- блок питания для микроконтроллера и для внешних подключаемых датчиков - миосенсоров, датчиков контроля кожно-гальванической реакции организма;
- модуль повышающего преобразователя напряжения для питания шаговых двигателей;
- модуль управления током шагового двигателя сгибания/разгибания кисти руки, собранный на плате управляющего микроконтроллера. Модуль управления током шагового двигателя включает в себя ЦАП микроконтроллера, являющегося составной частью микроконтроллера, расположенного на плате управляющего микроконтроллера с микроконтроллером 36 (Фиг.14), подключенный с входом схемы управления током контроллера шагового двигателя 38 (Фиг.14);
- автономные, независимые от электросети источники электропитания для питания всех электронных компонент и модулей тренажера, например, аккумуляторные батареи.
Модуль двигателя сгибания/разгибания кисти руки 3 (Фиг.1 - 6) фиксируется на модуле управления 1 оптимальным образом, а именно - сверху по центру продольной оси предплечья, благодаря чему предплечье не «выворачивает» на внешнюю сторону под весом двигателя, что показывает достижение заявленного технического результата.
Модуль двигателя сгибания/разгибания кисти руки 3 состоит из:
– пластикового корпуса 17 (Фиг.4), имеющего пазы 18 (Фиг.6), обеспечивающие возможность вставлять пластиковый корпус 17 (Фиг.4) в основание модуля управления 1 (Фиг.1) и фиксировать его винтами 19 (Фиг.6);
– шагового двигателя 12 (Фиг.5);
– планетарного редуктора 13 (Фиг.5) с передаточным отношением 1:99;
– цилиндрического редуктора 4 (Фиг.5), который, в свою очередь, состоит из 2-х шестерен 15, установленных на осях с подшипниками 14 (Фиг.5), обеспечивающими передаточное отношение 1:2;
– планки 16 редуктора, закрепленной с помощью винтов на шестерне 15 (Фиг.5), выполненной, например, из дюралюминия, с зафиксированным на ней модулем двигателя сгибания/разгибания кисти руки 6 (Фиг.1) и подложки 7 (Фиг.1) для фиксации пальцев одеваемой на руку перчатки; планка 16 обеспечивает регулировку по длине, в зависимости от размера ладони, и фиксирует регулировку по длине с помощью винтов с накаткой 16а (Фиг.5);
– абсолютного энкодера 5 (Фиг.5), находящегося в цепи обратной связи модуля управления током шагового двигателя, который (абсолютный энкодер) позволяет определять угол сгибания/разгибания кисти руки и, следовательно, позволяет выявлять признаки торможения шагового двигателя при увеличении нагрузки путем определения пропусков шагов шагового двигателя, а также позволяет оперативно и с высокой точностью контролировать движение кисти и пальцев руки;
– суппорт-фиксатора кисти руки 8 (Фиг.1, 2), закрепленного с одной стороны к модулю двигателя сгибания/разгибания пальцев руки 6 и с другой стороны к модулю дополнительного крепления подложки для фиксации пальцев 10, соединенного с модулем двигателя сгибания/разгибания пальцев руки 6, например, методом винт-гайка, поперечной планкой 10а (Фиг.2), и зафиксированного с помощью винта (на Фиг. не показано);
– подложки фиксации пальцев перчатки 7 (Фиг.1, 2), которая служит для фиксации кисти (кончиков пальцев) в тренажере.
Модуль двигателя сгибания/разгибания пальцев руки 6 (Фиг.1) с помощью механизма винтовой передачи скольжения перемещает линейно вдоль кисти руки шестерню 22 (Фиг.7) с закрепленной к оси шестерни подложки фиксации пальцев перчатки 7 (Фиг.1, 2), шестерня 22 крепится блок-гайкой 23 и вращается благодаря контакту с рейкой-шестерней 24 (Фиг.8).
Модуль двигателя сгибания/разгибания пальцев руки 6 (Фиг. 1) состоит из:
– второго шагового двигателя 20 (Фиг.7), закрепленного на дюралюминиевой планке 16 (Фиг.7),
– оси 21 шагового двигателя 20 (направляющий ходовой винт) (Фиг.7) с трапецеидальной резьбой, являющейся частью механизма винтовой передачи скольжения. При вращении оси 21 шагового двигателя 20 линейно перемещается блок-гайка 23 (Фиг.8) с закрепленной на ней шестерней 22 (Фиг.8) в направляющих пазах (на Фиг. не показаны). Таким образом, шаговый двигатель 20 модуля 6 (Фиг. 1) расположен практически на предплечье руки, вместо использованного в прототипе сервопривода, расположенного на конце вытянутой ладони руки. При этом вес модуля 6 (Фиг. 1) распределен вдоль всей кисти руки, что обеспечивает дополнительную устойчивость положения предплечья пациента, снижает вес нагрузки и, кроме того, использование механизма винтовой передачи скольжения увеличивает силу крутящего момента на оси шестерни, к которой закреплена подложка фиксации пальцев перчатки, что, в свою очередь, доказывает достижение заявленного технического результата;
– рейки-шестерни 24 (Фиг.8), закрепленной таким образом, чтобы обеспечить примыкание к шестерне 22 (Фиг.8) и таким образом обеспечить вращение шестерни 22 (Фиг.8) при линейном перемещении вдоль оси шагового двигателя.
– оси 25 (Фиг.9) шестерни 22 (Фиг.9) обратной стороны пластины 16 (Фиг.9), на которую (ось 25) закреплена поперечная подложка фиксации пальцев 7 (Фиг.9) одеваемой на руку перчатки 9 (Фиг. 1).
– модуля дополнительного крепления подложки фиксации пальцев руки 10 (Фиг.1, 2);
– подложки фиксации пальцев перчатки 7 (Фиг.1, 2), которая (подложка) вращается вокруг своей поперечной оси и обеспечивает возможность вращения закрепленной на ней перчатки 9 с встроенными в нее (перчатку) изнутри в кончики пальцев пластиковыми фиксаторами пальцев 26 (Фиг.12), которые крепятся к подложке путем вставления т-образных штырей крепления фиксатора пальца 28 (Фиг. 12) в пазы для установки фиксатора пальцев 27 (Фиг.10), «запираются» запорной планкой 29 (Фиг.10) для фиксации пальцев перчатки на подложке, которая крепится винтами 31 и 32, и фиксируются (фиксаторы пальцев 26) лентой-липучкой, продетой в ушко для ленты-липучки для фиксации запорной планки 30 (Фиг.10). В нижней части фиксаторов пальцев 26 (Фиг.12) в углублении 34 (Фиг.12) закреплены датчики давления, например – тензометрический фольговый датчик, отдельно для каждого из четырех пальцев. В указательный палец перчатки вшит резистора изгиба 33 (Фиг. 11), который используется в качестве абсолютного энкодера для измерения угла сгибания пальцев кисти руки. Данных о степени сгиба указательного пальца достаточно, чтобы судить о степени сгиба всех остальных пальцев.
Таким образом, вращая свою ось 21, шаговый двигатель 20 (Фиг.7), размещенный в модуле двигателя сгибания/разгибания пальцев руки 6 (Фиг. 1), обеспечивает вращательно-поступательное движение поперечной подложки фиксации пальцев 7 (Фиг.9) одеваемой на руку перчатки 9 (Фиг. 1), чем обеспечивает сгибание пальцев внутрь кисти и разгибание пальцев – при обратном движении.
Длина рейки-шестерни 24 (Фиг.8) выполнена таким образом, чтобы обеспечить максимальные углы сгибания пальцев (например, для проксимальной фаланги до 80 угловых градусов, средней фаланги – до 80 угловых градусов и дистальной фаланги – до 85 угловых градусов) – для обеспечения возможности полного сгибания/разгибания пальцев руки. Резистор изгиба 33 (Фиг.11), вшитый в указательный палец перчатки 9 (Фиг.1) используется в качестве абсолютного энкодера для измерения угла сгибания пальцев кисти руки.
Перчатка 9 служит для фиксации кисти руки на модуле сгибания пальцев руки, и оснащена расположенными внутри пальцев перчатки датчиками усилия давления пальцев руки (на Фиг. не указаны). Подробное описание перчатки 9 приведено при описании модуля двигателя сгибания/разгибания кисти руки 3 и модуля двигателя сгибания/разгибания пальцев руки 6.
Набор сенсорных датчиков (на Фиг. не указаны) в общем случае, служит для обеспечения обратной связи между входным сигналом управления и выходным воздействием (измеряемый и контролируемый с помощью датчиков) на физический параметр человека, например сгибание/разгибание кисти и пальцев руки, и обеспечивает (обратная связь) изменение входного управляющего сигнала в зависимости от выходного параметра по заданному в программном обеспечении алгоритму, измеренного с помощью этих датчиков (пропуск шагов шаговым двигателем при появлении чрезмерной нагрузки на ось шагового двигателя, угол сгиба кисти руки, пальцев руки, силы давления мышц суставов пальцев). Подробное описание использования сенсорных датчиков приведено при описании модуля двигателя сгибания/разгибания кисти руки 3 и модуля двигателя сгибания/разгибания пальцев руки 6.
Упор тренажера 11 на стол/кровать в состоянии пациента сидя/лежа, присоединяемый и выдвигаемый в случае необходимости, служит для обеспечения возможности не держать руку с зафиксированным на ней тренажером на весу в положении сидя или лежа в течение 30-40 минут при выполнении реабилитационных упражнений. Упор выполнен, например, из толстой металлической проволоки.
При проведении сеанса восстановительной терапии, например, в положении сидя, выдвигают упор и устанавливают его перпендикулярно продольной оси тренажера. Высота упора рассчитана таким образом, чтобы при выполнении сгибательных упражнений кисти вниз кончики пальцев не касались поверхности, на которой установлен тренажер (например, поверхности стола). Таким образом, рука пациента не напрягается, сеанс может продолжаться до 40-50 минут в случае необходимости, без дополнительной нагрузки на руку пациента, что показывает достижение заявленного технического результата.
Браслет» 39 из мягкой ткани.
Динамика процесса восстановления возможностей пациента использовать мышечные функции определяется с помощью миосенсоров, которых расположены не в модуле управления, а вшиты в отдельный «браслет» 39 из мягкой ткани (Фиг.15), выполненном в виде матерчатой манжеты, опоясывающей предплечье пациента чуть выше модуля тренажера, и фиксируемой с помощью ленты-липучки.
Компьютер с предварительно установленным на нем программным обеспечением (на Фиг. не указан).
Измеренные показатели сигналов при непосредственном контакте пациента и лечащего врача отслеживаются на месте проведения реабилитационного процесса на компьютере пациента.
При взаимоудаленности пациента и лечащего врача показатели сигналов и корректирующие ход процесса реабилитации сигналы передаются дистанционно, с использованием Bluetooth и сети Интернет.
При этом в ходе реабилитационного процесса психоэмоциональное состояние пациента и анализ болевых ощущений контролируют с использованием датчиков кожно-гальванической реакции организма (КГР), одетых на указательный и средний пальцы здоровой руки (датчики КГР на Фиг. не указаны).
Далее заявителем описано осуществление работы заявленного тренажера.
Пример 1. Реабилитациия кисти руки путем сгибания вверх/вниз.
Реабилитация кисти руки происходит путем её принудительного сгибания/разгибания вверх/вниз, для чего:
а) фиксируют руку пациента:
- подстраивают тренажер под длину ладони пациента путем перемещения модуля двигателя сгибания/разгибания пальцев руки 6 (Фиг. 5) по планке 16 (Фиг. 5) для комфортного размещения ладони в тренажере (размещения пальцев руки пациента на подложке 7 (Фиг.1), после чего фиксируют модуль двигателя 3 с помощью винта с накаткой 16а (Фиг.5),
- на планку 16 (Фиг.7) с одной стороны и на модуль дополнительного крепления подложки для фиксации пальцев 10 (Фиг.1) с другой стороны закрепляют с помощью крепления винт-гайка суппорт-фиксатор кисти руки 8 (Фиг. 1), подпирающий снизу в зоне основания большого пальца кисть руки при сгибании кисти вверх - это позволяет приложить максимальное усилие при удержании кисти в статическом режиме.
- вдевают кисть руки в перчатку 9 (Фиг.1), которая для фиксации кисти руки выполнена обеспечивающей возможность одеть ее на руку пациента даже с высокой степенью контрактуры кисти и/или пальцев. Для этого на каждом пальце перчатки сбоку выполнен разрез, позволяющий фиксировать в пальцах перчатки каждый палец пациента независимо (от других пальцев) с использованием ленты-липучки, опоясывая пальцы перчатки (с находящимися в них пальцами руки) фиксирующими лентами-липучками, расположив ленты-липучки в промежутках между суставами пальцев в положениях, не мешающих движению суставов.
- таким же образом на суппорте-фиксаторе кисти руки 8 (Фиг. 1) с помощью ленты-липучки фиксируют реабилитируемую кисть руки с сохранением возможности выполнения естественных движений кисти без помех.
- перчатку 9 (Фиг.1) фиксируют на кисти руки так же лентой-липучкой. Для надежной фиксации каждого пальца в перчатке в районе основания мизинца и указательного пальцев на перчатке 9 (Фиг.1) закрепляют конец двух лент-липучек, вторым концом эти ленты-липучки фиксируют на ленте-липучке, обхватывающей кисть руки как браслет. При этом внутри перчатки на конце каждого пальца перчатки расположен фиксатор пальца 26 (Фиг.10), в углублении 34 крепится датчик усилия давления пальца (на Фиг. не указан).
- этот же фиксатор пальцев 26 используют для крепления пальцев перчатки к подложке, который, в отличие от прототипа, крепится путем вставления т-образных штырей крепления фиксатора пальца 28 (Фиг. 12) в пазы для установки фиксатора пальцев 27 (Фиг.10), «запираются» запорной планкой 29 (Фиг.10) для фиксации пальцев перчатки на подложке и фиксируются лентой-липучкой, продетой в ушко 30 для ленты-липучки для фиксации запорной планки 29 (Фиг.10). Этот метод крепления упрощает процесс фиксации перчатки на подложке и сокращает время на подготовку к сеансу реабилитации по сравнению с прототипом, что доказывает достижение заявленного технического результата.
б) проводят реабилитацию кистей рук следующим образом.
После фиксации кисти руки пациента с помощью перчатки на тренажере, сигнал, поступающий от программного обеспечения компьютера пациента на контроллер, расположенный в модуле управления 1 (Фиг.1), а от контроллера на шаговый двигатель 12, заставляет вращаться шаговый двигатель 12 (Фиг.5), расположенный в модуле двигателя сгибания/разгибания кисти руки 3, который (шаговый двигатель) через планетарный редуктор 13 (Фиг.5) и цилиндрический редуктор 4 (Фиг.5) начинает поворачивать планку 16 для фиксации подложки пальцев, одеваемой на руку перчатки (Фиг.5), (и, соответственно кисти пациента) вверх или вниз, в зависимости от поданного сигнала из модуля управления. При этом обеспечивается постоянное считывание информации с абсолютного энкодера 5 (Фиг.5) об угловом положения планки 16 (Фиг.5) (и, соответственно, кисти руки). За счет использования шагового двигателя с шагом, например – 0,9 углового градуса, планетарного редуктора, например – с передаточным числом 1:99 и дополнительного цилиндрического редуктора с передаточным числом 1:2 обеспечивается точное позиционирование кисти руки в требуемом положении и управляемо задаваемое усилие, необходимое при использовании статического режима реабилитации. При этом абсолютный энкодер 5 позволяет выявлять признаки торможения шагового двигателя при увеличении нагрузки путем определения пропусков шагов шагового двигателя, а написанное программное обеспечение путем анализа данных, полученных с абсолютного энкодера, формирует сигнал микроконтроллера, поступающий на модуль управления током шагового двигателя, увеличивая его мощность, что позволяет оперативно и с высокой точностью выравнивать статическую нагрузку на кисть руки пациента через модуль управления током шагового двигателя.
Кроме того, благодаря дополнительному цилиндрическому редуктору удалось уменьшить вес шагового двигателя, использовав менее мощный шаговый двигатель меньшего размера и уменьшенный планетарный редуктор при сохранении прежних технических характеристик (силы крутящего момента), что доказывает достижение заявленного технического результата.
Режим и параметры действий для реабилитации статического метода или метода CPM устанавливают с помощью разработанного программного обеспечения, установленного на компьютере – требуемый угол сгиба кисти, время удержания для статического метода и количество сгибов вверх/вниз для метода CPM, контроль выполнения упражнений выполняется путем использования обратной связи, осуществляемой с использованием абсолютного энкодера.
Абсолютный энкодер 5 (Фиг.5) размещен на планке 16 (Фиг.5) и обеспечивает возможность контроля и управляемой установки угла сгибания/разгибания кисти руки. При возникновении чрезмерной нагрузки, давящей на подложку для фиксации пальцев одеваемой на руку перчатки (например, при сильной степени пареза кисти пациента, нарушении сгибательных функций кисти руки), приводящей к торможению шагового двигателя и пропуску шагов шагового двигателя, что показывают показания абсолютного энкодера, с помощью модуля управления током шагового двигателя сгибания/разгибания кисти руки 37 (Фиг. 14), с помощью написанной программы автоматически увеличивают силу тока управляющего сигнала шаговым двигателем 12 (Фиг.14) путем увеличения уровня сигнала напряжения ЦАП микроконтроллера, расположенного на плате управляющего микроконтроллера с микроконтроллером 36 (Фиг.14) на вход схемы управления током контроллера шагового двигателя 38 (Фиг.14), расположенного на той же плате управляющего микроконтроллера с микроконтроллером 36 (Фиг.14), вплоть до прекращения процесса пропуска шагов шагового двигателя. Усиление сигнала происходит в жестко заданных пределах, позволяет оперативно и с высокой точностью выравнивать статическую нагрузку на кисть руки пациента и не позволяет привести к повреждению сустава кисти руки пациента.
При достижении кисти руки в заданное положение (верхнее, ибо сопротивление наиболее сильно проявляет себя именно при движении кисти руки вверх), автоматически с помощью программного обеспечения уменьшается уровень сигнала напряжения ЦАП микроконтроллера, а это означает, что и сила тока сигнала, управляющего шаговым двигателем, уменьшается до минимума, необходимого, в случае реализации статического метода реабилитации, для удержания кисти руки в требуемом состоянии, или в случае реализации метода CPM для движения кисти вниз, что устраняет перегрев шагового двигателя. Таким образом, обеспечено более эффективное использование автономных источников электропитания за счет зависимости величины тока питания шагового двигателя от реальной нагрузки - ток уменьшается в случае уменьшения нагрузки и, соответственно, увеличивается в случае большего сопротивления, а в случае статического режима - фиксации кисти в заданном положении на длительное время, например, до 40 минут, с помощью программного обеспечения уменьшается ток управления шаговыми двигателями для устранения перегрева двигателя, что доказывает достижение заявленного технического результата.
Таким образом, введение в состав тренажера модуля управления током шагового двигателя сгибания/разгибания кисти руки и использование в его цепи обратной связи абсолютного энкодера приводит к достижению целого ряда описанных выше технических результатов, обусловленных взаимосвязью дополняемой части и известного средства (прототипа), что соответствует условию патентоспособности «изобретательский уровень».
Пример 2. Реабилитация пальцев руки.
Процесс реабилитации пальцев руки заключается в принудительном сгибании пальцев, помещенных в перчатку заявленного тренажера, и отличается от прототипа тем, что сгибание пальцев обеспечивается путем вращения оси дополнительного шагового двигателя 20 (Фиг.7), который размещается в модуле двигателя сгибания/разгибания пальцев руки 6 (Фиг. 1).
Для процесса сгибания/разгибания пальцев суппорт-фиксатор кисти руки 8 (Фиг. 1) не нужен, поэтому его можно снять путем отвинчивания соединения винт-гайка.
Реабилитация кисти руки происходит следующим образом:
а) фиксируют руку пациента аналогично Примеру 1.
б) реабилитацию пальцев рук путем принудительного сгибания пальцев проводят следующим образом.
Сигнал, поступающий от программного обеспечения компьютера пациента, после выбора соответствующего режима работы, на контроллер, расположенный в модуле управления 1 (Фиг.1), а от контроллера на шаговый двигатель 20 (Фиг.1), заставляет шаговый двигатель вращаться (Фиг.7). Ось шагового двигателя 20 (Фиг.7) является винтом с трапецеидальной резьбой, являющейся частью механизма винтовой передачи скольжения. При вращении оси шагового двигателя линейно перемещается блок-гайка 23 (Фиг.8) с закрепленной на ней шестерней 22 (Фиг.8) в направляющих пазах (на Фиг. не показаны) вдоль кисти руки. В верхней части планки 16 (Фиг.9) с зафиксированной на ней подложкой для фиксации пальцев перчатки, одеваемой на руку, расположена рейка-шестерня 24 (Фиг.9), закрепленная таким образом, чтобы обеспечить примыкание к шестерне 22 (Фиг.9) и таким образом обеспечить вращение шестерни 22 (Фиг.9) при линейном перемещении шестерни вдоль оси шагового двигателя 20. На ось 25 (Фиг.9) шестерни 22 (Фиг.9) с обратной стороны пластины 16 (Фиг.9) закреплена поперечная подложка фиксации пальцев 7 (Фиг.9) одеваемой на руку перчатки 9 (Фиг. 1). Таким образом, вращая свою ось, шаговый двигатель 20 (Фиг.7), размещенный в модуле 6 (Фиг. 1), обеспечивает поступательное движение блок-гайки 23 (Фиг.8), а шестерня 22 (Фиг.9), зафиксированная осью к блок-гайке 23, благодаря примыканию зубьями к рейке-шестерне 24 (Фиг.9) вращаясь, обеспечивает вращательно-поступательное движение поперечной подложки фиксации пальцев 7 (Фиг.9), закрепленной к оси 25 (Фиг.9) шестерни 22 (Фиг.9) с внутренней стороны планки 16 (Фиг.9), что приводит к сгибанию пальцев внутрь кисти и разгибание пальцев – при обратном движении.
Использование модуля дополнительного крепления подложки для фиксации пальцев 10 (Фиг.1) позволяет создать П-образную конструкцию для крепления подложки для фиксации пальцев, что обеспечивает более равномерное распределение нагрузки на подложку для фиксации пальцев. Так же таким образом обеспечивается более надежная работа тренажера, исключающая заклинивание и перекос конструкции, что доказывает достижение заявленного технического результата
Таким образом, за счет использования механизма рейка-шестерня 24 (Фиг.9) обеспечивается возможность одновременного выполнения как вращательного, так и поступательного движения подложки с зафиксированной на подложке, одетой на руку, перчатки 9 (Фиг. 1) внутрь кисти при сгибании и наружу – для разгибания пальцев. Считывание данных происходит с резистора изгиба 33 (Фиг. 11), вшитого в указательный палец перчатки, с возможностью его использования в качестве абсолютного энкодера для измерения угла сгибания пальцев кисти руки, что позволяет осуществлять постоянный мониторинг угла сгибания пальцев и корректировать процесс реабилитации.
Процесс реабилитации двигательных навыков пальцев руки путем их принудительного сгибания/разгибания вверх/вниз у заявленного технического решения отличается от прототипа тем, что процесс обеспечивается использованием отсутствующего у прототипа шагового двигателя 20 (Фиг.7), который с помощью механизма винтовой передачи скольжения и механизма рейка-шестерня преобразует вращательный момент шагового двигателя во вращательно-поступательное движение подложки для фиксации пальцев одеваемой на руку перчатки, что, в конечном счете, обеспечивает принудительное, контролируемое сгибание пальцев кисти руки пациента.
Таким образом, введение в состав тренажера второго шагового двигателя сгибания/разгибания кисти руки, использование П-образной конструкции для крепления подложки для фиксации пальцев с использованием модуля дополнительного крепления подложки для фиксации пальцев, приводит к достижению целого ряда описанных выше технических результатов, обусловленных взаимосвязью дополняемой части и известного средства (прототипа), что соответствует условию патентоспособности «изобретательский уровень».
Пример 3. Реабилитациия кисти руки путем сгибания вправо/влево.
Реабилитацию кисти руки путем принудительного сгибания кисти вправо-влево проводят следующим образом.
- модуль двигателя сгибания/разгибания кисти руки 3 (Фиг.13) фиксируется на подложке модуля управления 1 (Фиг.13) с помощью пазов в торце модуля двигателя и подложки и фиксируется с помощью винтов крепления 19 (Фиг.6) модуля двигателя сгибания/разгибания кисти руки на подложке тренажера,
- тренажер настраивается под длину ладони пациента путем перемещения сменного модуля сгибания кисти руки вправо/влево 35 (Фиг. 13) по планке 16 (Фиг. 13) и фиксации его с помощью винта с накаткой 16а (Фиг.13),
- кисть руки пациента размещается на основание сменного модуля 35 (Фиг. 13) и фиксируется лентой-липучкой,
- процесс движения сменного модуля сгибания кисти руки вправо/влево производится аналогично процессу движения модуля двигателя сгибания/разгибания кисти руки вверх/вниз, только в горизонтальной плоскости.
В заявленном тренажере обеспечена возможность не держать руку с зафиксированным на ней тренажером на весу в положении сидя или лежа в течение 30-40 минут при выполнении реабилитационных упражнений за счет наличия выдвигаемого (устанавливаемого) в случае необходимости упора 11 тренажера на стол/кровать, выполненного, например, из толстой металлической проволоки.
Процесс контроля динамики процесса реабилитации на заявленном тренажере отличается от прототипа тем, что миосенсоры, с помощью которых определяется динамика процесса восстановления возможностей пациента использовать мышечные функции, расположены не в модуле управления, а на отдельном «браслете» 39 (Фиг.15), выполненном в виде матерчатой манжеты, опоясывающей предплечье пациента чуть выше расположенного модуля тренажера на предплечье пациента и фиксируемой с помощью ленты-липучки. Это обеспечивает лучший контакт миосенсора с кожной поверхностью предплечья пациента, что в конечном итоге ведет к более точному определению степени улучшения/ухудшения процесса реабилитации в сторону увеличения/уменьшения времени реабилитации, что доказывает достижение заявленного технического результата.
Измеренные показатели сигналов при непосредственном контакте пациента и лечащего врача, аналогично прототипу, отслеживаются на месте проведения реабилитационного процесса на компьютере пациента. При взаимоудаленности пациента и лечащего врача показатели сигналов и корректирующие ход процесса реабилитации сигналы передаются дистанционно, с использованием Bluetooth и сети Интернет. При этом в ходе реабилитационного процесса психоэмоциональное состояние пациента и анализ болевых ощущений контролируют с использованием датчиков кожно-гальванической реакции организма (КГР), одетых на указательный и средний пальцы здоровой руки (датчики КГР на Фиг. не указаны). Для контроля динамики процесса реабилитации в мышцах пальцев кисти рук используются резистивные датчики давления, расположенные в углублении - месте крепления датчика усилия давления пальцев 34 (Фиг.12) внутри пластиковых фиксаторов пальцев 26 (Фиг.12).
Таким образом, из описанного выше можно сделать вывод, что заявителем достигнуты поставленные цели и заявленные технические результаты, а именно - повышена эксплуатационная надежность, улучшены эргономические свойства тренажера, расширен перечень и область применения средств реабилитации естественной подвижности суставов рук, суставов кистей и пальцев/или отдельного пальца рук, тонуса и силы мышц рук, кистей и пальцев рук, утраченных вследствие болезни и/или травмы, повышено удобство эксплуатации тренажера.
При этом устранены недостатки прототипа, а именно:
1 – обеспечена возможность проведения реабилитации в статическом режиме без снижения нагрузки на кисть руки пациента в течение длительного времени в результате дополнительного введения модуля управления током шагового двигателя сгибания/разгибания кисти руки и использования абсолютного энкодера в цепи обратной связи, который (абсолютный энкодер) позволяет выявлять признаки торможения шагового двигателя при увеличении нагрузки путем определения пропусков шагов шагового двигателя, а написанное программное обеспечение путем анализа данных, полученных с абсолютного энкодера, формирует сигнал микроконтроллера, поступающий на модуль управления током шагового двигателя, увеличивая его мощность, что позволяет оперативно и с высокой точностью выравнивать статическую нагрузку на кисть руки пациента через модуль управления током шагового двигателя.
2 – обеспечена возможность более эффективной реабилитации в динамическом режиме, так как в результате введения модуля управления током шагового двигателя сгибания/разгибания кисти руки и использования абсолютного энкодера в цепи обратной связи обеспечивается постоянная оперативная обратная связь по нагрузке на кисть и пальцы руки пациента, что позволяет оперативно и с высокой точностью контролировать движение кисти и пальцев руки.
3 - обеспечено устранение перегрева шагового двигателя в статическом режиме в результате введения модуля управления током шагового двигателя сгибания/разгибания кисти руки, который в статическом режиме при достижении заданного программным обеспечением положения кисти автоматически устанавливается необходимый для удержания минимальный ток шагового двигателя, что, в свою очередь, предохраняет шаговый двигатель от перегрева и, таким образом, позволяет проводить длительную реабилитацию;
4 - обеспечено более эффективное использование автономных источников электропитания в результате введения модуля управления током шагового двигателя сгибания/разгибания кисти руки, в результате чего:
- в статическом режиме при достижении заданного программным обеспечением положения кисти автоматически устанавливается необходимый для удержания минимальный ток шагового двигателя, при этом при обратном движении кисти вниз ток снижают до минимума вследствие отсутствия сопротивления движения руки при ее ходе вниз;
- в динамическом режиме обеспечивается зависимость тока потребления шаговым двигателем модуля двигателя для сгибания/разгибания кисти руки от реальной нагрузки - ток уменьшается в случае уменьшения нагрузки и, соответственно, увеличивается в случае большого сопротивления движению;
5 – обеспечено уменьшение перевешивания и «выворачивания» предплечья руки пациента на внешнюю сторону под весом двигателя путем оптимального размещения модуля двигателя для сгибания/разгибания кисти руки, содержащего шаговый двигатель с металлическим редуктором, на внешней стороне посередине продольной оси предплечья, кроме того, благодаря дополнительному редуктору уменьшается вес двигателя, так как использован менее мощный шаговый двигатель меньшего размера и планетарный редуктор при сохранении прежних технических характеристик (силы крутящего момента)
6 – обеспечена дополнительная устойчивость положения предплечья пациента благодаря использованию второго шагового двигателя в модуле двигателя для сгибания/разгибания пальцев кисти руки, расположенного практически на предплечье руки, вместо использованного в прототипе сервопривода, расположенного на конце вытянутой ладони руки, что снижает вес нагрузки и увеличивает силу крутящего момента на оси шестерни, к которой закреплена подложка фиксации пальцев перчатки;
7 – обеспечено ускорение и удобство процесса подготовки пациента к сеансу реабилитации путем использования т-образного штыря в пластиковом фиксаторе пальцев и запорной планки для фиксации пальцев перчатки на подложке, вместо крепежных винтов у прототипа;
8 – обеспечен лучший контакт миосенсоров с кожной поверхностью предплечья пациента благодаря использованию браслета из мягкой ткани, опоясывающего предплечье пациента чуть выше расположенного модуля тренажера на предплечье пациента, фиксируемого (браслет) с помощью ленты-липучки, что (лучший контакт миосенсоров с кожной поверхностью) в конечном итоге приводит к более точному определению степени улучшения/ухудшения процесса реабилитации в сторону увеличения/уменьшения времени реабилитации;
9 – обеспечено равномерное распределение нагрузки на подложку для фиксации пальцев, обеспечение надежной работы тренажера путем использования П-образной конструкции для крепления подложки для фиксации пальцев с использованием модуля дополнительного крепления подложки для фиксации пальцев;
10 – обеспечена возможность не держать руку с зафиксированным на ней тренажером на весу в положении сидя или лежа в течение 30-40 минут при выполнении реабилитационных упражнений за счет разработки выдвигаемого (устанавливаемого) в случае необходимости упора тренажера на стол/кровать, выполненного, например, из толстой металлической проволоки.
Заявленное техническое решение соответствует условию патентоспособности «новизна», предъявляемому к изобретениям, так как при исследовании уровня техники не выявлено устройство, которому присущи признаки, идентичные (то есть совпадающие по исполняемой ими функции и форме выполнения этих признаков) совокупности признаков, перечисленных в формуле изобретения, включая характеристику назначения.
Заявленное техническое решение соответствует условию патентоспособности «изобретательский уровень», предъявляемому к изобретениям, так как при исследовании уровня техники не выявлены технические решения, имеющие признаки, совпадающие с отличительными признаками заявленного изобретения, и не установлена известность влияния отличительных признаков на указанный заявителем технический результат.
При этом заявленное техническое не следует явным образом из уровня техники вследствие того, что заявителем не выявлены тренажеры, имеющие заявленную совокупность признаков, обеспечивающую достижение суммарного технического результата, достигнутого заявителем, а именно - возможность проведения реабилитации в статическом режиме без снижения нагрузки на кисть руки пациента в течение длительного времени, надежной работы в длительном статическом режиме без перегрева двигателя, с возможностью обеспечения зависимости тока питания от реальной нагрузки, с дополнительным решением проблем улучшения эргономических показателей, таких, как удобство размещения руки пациента, лучший контакт датчиков с рукой пациента, ускорение и удобство подготовки пациента к сеансу реабилитации и др., что, по мнению заявителя, свидетельствует о соответствии заявленного технического решения условию патентоспособности «изобретательский уровень».
Заявленное техническое решение соответствует условию патентоспособности «промышленная применимость», предъявляемому к изобретениям, так как может быть изготовлено с применением имеющихся в свободном доступе известных инструментов, материалов, комплектующих деталей и узлов, при этом может быть за короткий срок запущено в промышленное производство.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| Мышечный интерпретатор | 2023 |
|
RU2826231C1 |
| Способ персонализированной физической реабилитации больных с двигательными нарушениями лучезапястных суставов и пальцев кисти | 2020 |
|
RU2739699C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Интерактивный тренажер для реабилитации двигательной функции руки после неврологического поражения | 2024 |
|
RU2830420C1 |
| Способ реабилитации пациентов с неврологическими нарушениями после ишемического инсульта | 2023 |
|
RU2829423C2 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |
| Тренажер для укрепления верхних конечностей и туловища КУШЕТКА и способ его применения | 2022 |
|
RU2777248C1 |
| АССИСТИРУЮЩИЙ РОБОТ-ТРЕНАЖЕР ДЛЯ ПОВРЕЖДЕННОЙ КИСТИ | 2020 |
|
RU2744753C1 |
| СПОСОБ РЕАБИЛИТАЦИИ | 2021 |
|
RU2770595C1 |


Изобретение относится к медицине, а именно к тренажерам с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук. Тренажер состоит из модуля управления, модуля повышающего преобразователя напряжения для питания шаговых двигателей, модуля двигателя сгибания/разгибания кисти руки, модуля двигателя сгибания/разгибания пальцев руки, датчиков контроля кожно-гальванической реакции организма, перчатки для фиксации кисти руки и подключаемого в Интернет компьютера. Модуль управления выполнен в виде полого пластикового корпуса, фиксируемого на предплечье пациента. Модуль управления содержит модуль управления током шагового двигателя сгибания/разгибания кисти руки, контроллер шагового двигателя сгибания/разгибания пальцев руки, блок питания для микроконтроллера и для внешних подключаемых датчиков – миосенсоров и датчиков контроля кожно-гальванической реакции организма. Модуль двигателя сгибания/разгибания кисти руки расположен сверху по центру продольной оси кисти руки и дополнительно содержит цилиндрический редуктор и абсолютный энкодер. Перчатка для фиксации кисти руки содержит пластиковый фиксатор пальцев с т-образным штырем и запорной планкой для фиксации пальцев перчатки на подложке, а также резистор изгиба, вшитый в указательный палец перчатки с возможностью его использования в качестве абсолютного энкодера для измерения угла сгибания пальцев руки. Тренажер также содержит браслет из мягкой ткани с вшитыми в него двумя миосенсорами, фиксируемый на предплечье с помощью ленты-липучки. Достигается повышение эксплуатационной надежности и удобства эксплуатации тренажера. 15 ил.
Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук, состоящий из:
модуля управления, выполненного в виде полого пластикового корпуса, фиксируемого на предплечье пациента, в котором расположены управляющий микроконтроллер, контроллер шагового двигателя для сгибания/разгибания кисти руки, Bluetooth - модуль связи с входящим в комплект тренажера компьютером;
модуля повышающего преобразователя напряжения для питания шаговых двигателей, автономных, независимых от электросети источников электропитания для питания всех электронных компонент и модулей тренажера;
модуля двигателя сгибания/разгибания кисти руки, оснащенного шаговым двигателем;
модуля двигателя сгибания/разгибания пальцев руки;
датчиков контроля кожно-гальванической реакции организма;
перчатки для фиксации кисти руки на модуле сгибания/разгибания пальцев руки, оснащенной расположенными внутри пальцев датчиками усилия давления пальцев руки;
подключаемого в Интернет компьютера с установленным на нём разработанным программным обеспечением,
отличающийся тем, что
модуль управления дополнительно содержит модуль управления током шагового двигателя сгибания/разгибания кисти руки, контроллер шагового двигателя сгибания/разгибания пальцев руки, блок питания для микроконтроллера и для внешних подключаемых датчиков - миосенсоров, датчиков контроля кожно-гальванической реакции организма;
модуль двигателя сгибания/разгибания кисти руки расположен сверху по центру продольной оси кисти руки и дополнительно содержит цилиндрический редуктор и абсолютный энкодер;
модуль двигателя сгибания/разгибания пальцев руки дополнительно содержит второй шаговый двигатель и модуль дополнительного крепления подложки фиксации пальцев руки;
перчатка для фиксации кисти руки содержит пластиковый фиксатор пальцев с т-образным штырем и запорной планкой для фиксации пальцев перчатки на подложке, а также резистор изгиба, вшитый в указательный палец перчатки с возможностью его использования в качестве абсолютного энкодера для измерения угла сгибания пальцев руки;
при этом тренажер дополнительно содержит браслет из мягкой ткани с вшитыми в него двумя миосенсорами, фиксируемый на предплечье с помощью ленты-липучки,
и упор тренажера на стол/кровать в состоянии пациента сидя/лежа.
| 0 |
|
SU175324A1 | |
| WO 2011117901 A1, 29.09.2011 | |||
| Перчатка-экзоскелет с линейными актуаторами | 2019 |
|
RU2717046C1 |
| US 20170266075 A1, 21.09.2017 | |||
| WO 2018188480 A1, 18.10.2018 | |||
| KR 1020170042273 A, 18.04.2017. | |||

