Техническое решение относится к области мишенных комплексов, а именно к устройствам для определения точности попадания пуль при стрельбе преимущественно из стрелкового боевого и спортивного оружия в открытых и закрытых тирах.
В настоящее время известно много устройств, содержащих мишень, выполненную в виде прямоугольной рамы закрытой спереди и сзади резиновыми экранами, имеющими возможность перемещаться в вертикальном или горизонтальном направлениях. Внутри рамы (измерительной камере) расположены акустические датчики, выходы которых через усилители подключены к вычислителю координат попадания пуль. Расчет координат попадания в этих устройствах осуществляется из условия, что скорость распространения звука в воздухе постоянна и известна.
Однако скорость распространения звука в воздухе очень сильно зависит от температуры и плотности, т.е. параметров среды. Неучет зависимости распространения скорости звука внутри измерительной камеры от климатических условий приводит к ошибкам в определении координат попадания пуль. Особенно это сказывается при использовании таких устройств в условиях открытого тира, где параметры среды меняются в широком диапазоне. Следовательно, погрешность в измерении координат попадания пуль в этих устройствах связана с неточностью определения скорости распространения звука.
Наиболее близким по технической сущности к заявленному решению является устройство, описанное в патенте Швейцарии №691514, МПК F41J 7/00, 2001 года. Это устройство содержит мишень, выполненную в виде прямоугольной рамы спереди и сзади, которая закрыта бесконечной резиновой лентой, образуя камеру, внутри которой располагаются датчики, выводы которых через усилители связаны с блоком вычисления координат попадания пуль.
Компенсацию ошибок в определении координат попадания пуль, связанную с изменением скорости распространения звуковой волны от температуры в этом устройстве осуществляют путем установки в измерительной камере дополнительного датчика для измерения температуры воздуха и канала передачи информации в вычислитель. Однако такое устройство не обладает необходимой точностью и надежностью.
Технической задачей заявляемого устройства является повышение точности и надежности определения координат попадания пуль независимо от климатических условий (температуры и плотности) окружающей среды.
Поясним сказанное. Пусть пуля пролетела так, как показано на блок-схеме, тогда с учетом принятых на схеме обозначений, имеем четыре независимых уравнения:
V2(T+Δt1)2=X2+ Y2
V2T2=X2+(H-Y)2
V2(T+Δt3)2=(L-X)2+(H-Y)2
V2(T+Δt4)2=(L-X)2+Y2,
где X, Y - значения координат пробоин для выбранной системы координат;
Т - время распространения звуковой волны от момента пробития пулей переднего резинового экрана до прихода ее к первому из 4-х координатных датчиков (в нашем случае это датчик 2);
V - скорость распространения звуковой волны в измерительной камере мишени;
L, Н - размеры измерительной камеры мишени;
Δt1, Δt3, Δt4 - временные интервалы, равные времени распространения звуковой волны от момента ее прихода к первому из 4-х датчиков (в нашем случае это датчик 2) до прихода ее к соответствующим датчикам (в нашем случае это 1, 3 и 4).
Данная система уравнений имеет четыре неизвестных переменных X, Y, Т и V. Значения временных интервалов Δti определяются в процессе стрельбы.
Решение этой системы относительно X, Y, Т и V дает:

 ,
,
где 

K3=H2L2(L2+H2).
Видно, что X, Y, Т и V зависят только от измеренных временных интервалов Δti, определяемых непосредственно в реальных климатических условиях (температуры и плотности) и, следовательно, они (временные интервалы Δti) несут информацию о распределении скорости звука, которую необходимо было учесть.
Для достижения указанного технического результата предлагается в устройстве, содержащем мишень в виде прямоугольной рамы, спереди и сзади закрытой резиновыми экранами, образующими измерительную камеру, внутри которой располагаются четыре акустических датчика, соединенные с усилителями и блок вычисления координат, выходы усилителей подключены к блоку вычисления координат попадания пуль через блок измерения временных интервалов, включающий четыре управляемых одновибратора, четырехвходовую логическую схему «И», четыре триггера управления, четыре двухвходовые логические схемы «И», четыре счетчика и тактовый генератор, причем выходы усилителей через управляемые одновибраторы подключены к четырехвходовой логической схеме «И» и единичным входам триггеров управления, при этом выход четырехвходовой логической схемы «И» подключен к счетным входам триггеров управления, прямые выходы триггеров управления подключены к первым входам двухвходовых логических схем «И», вторые входы которых связаны с тактовым генератором, а выходы этих двухвходовых логических схем «И» подключены к входам счетчиков, выходы которых связаны с блоком вычисления координат попадания, кроме того, управляющий выход блока вычисления координат попадания связан со вторыми входами управляющих одновибраторов и входами «Сброс» счетчиков.
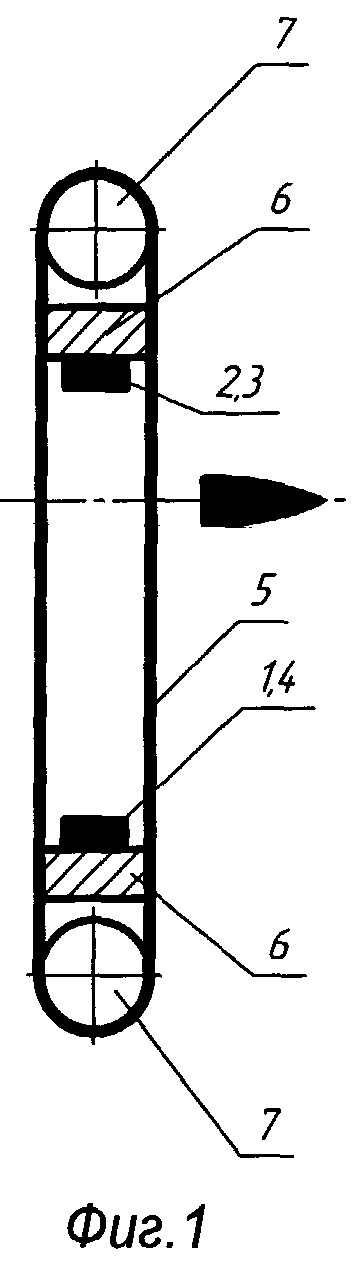
На фиг.1 изображен поперечный разрез мишени.
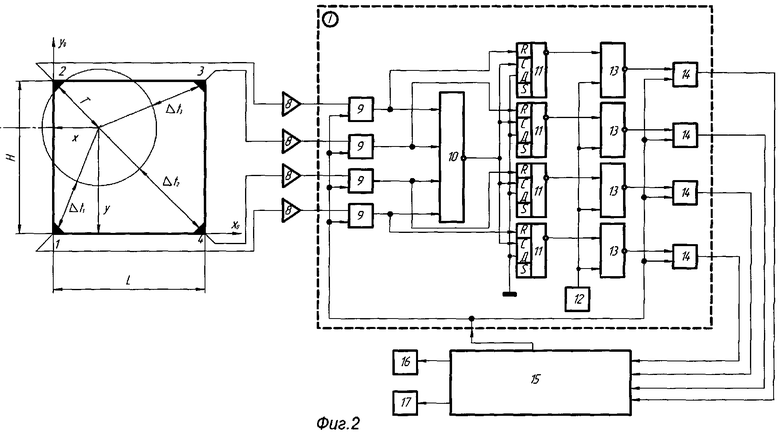
На фиг.2 изображена блок-схема предлагаемого устройства для определения координат попадания пуль.
Мишень состоит из прямоугольной рамы 6, замкнутой резиновой ленты 5, надетой на валики 7, с помощью которых она может протягиваться. Внутри рамы 6 установлены четыре акустических датчика 1, 2, 3, 4, которые подключены к усилителям 8. Блок измерения временных интервалов (на чертеже обведен штрих-пунктирной линией) содержит управляемые одновибраторы 9, четырехвходовую логическую схему «И» 10, триггеры управления 11, двухвходовые логические схемы «И» 13, счетчики 14, тактовый генератор 12.
Выходы усилителей 8 через управляемые одновибраторы подключены к четырехвходовой логической схеме «И» 10 и единичным входам R триггеров управления 11. При этом выход четырехвходовой логической схемы «И» 10 подключен к счетным входам С триггеров управления 11, а входы Д заземлены. Прямые выходы триггеров управления 11 подключены к первым входам двухвходовых логических схем «И» 13, вторые входы которых связаны с тактовым генератором 12, а выходы этих двухвходовых логических схем «И» 13 подключены к входам счетчиков 14, выходы которых связаны с блоком вычисления координат попадания 15, кроме того, управляющий выход блока вычисления координат попадания связан со вторыми входами управляющих одновибраторов и входами «Сброс» счетчиков 14.
В качестве блока вычисления координат 15 может быть использован компьютер, соединенный в свою очередь с монитором 16 и принтером 17.
Работает устройство следующим образом.
При выстреле пуля пробивает передний и задний резиновые экраны 5. В результате в месте пробоины измерительной камеры, которая определяется размерами рамы 6 и расстоянием между передними и задними резиновыми экранами, возникает сферическая звуковая волна, которая трансформируется в плоскую звуковую волну, распространяясь к акустическим датчикам. Для нашего случая (см. фиг.2) звуковая волна вначале достигает датчика 2, сигнал с которого через усилитель 8 поступает на соответствующий управляемый одновибратор 9, на входе которого формируется низкий логический уровень ЛОГ.0, который подается на один из входов четырехвходовой логической схемы «И» 10 и на единичный вход R1 триггера управления 11. При этом на выходе четырехвходовой логической схемы «И» 10 формируется высокий логический уровень ЛОГ.1, который поступает на счетные входы С всех триггеров управления 11. Триггер управления 11, который связан с датчиком 2, не изменит своего состояния, так как сигналы одновременно поступают как на счетный вход ЛОГ. 1, так и на первый единичный вход ЛОГ.0, а остальные триггеры управления 11 сработают и на прямых выходах установится высокий логический уровень ЛОГ.1. В нашем случае это каналы 1, 3 и 4. Выходы триггеров управления 11 связаны с первыми входами двухвходовых логических схем «И» 13, в результате на них установятся высокие уровни ЛОГ.1. Так как на вторые входы логической схемы «И» 13 непрерывно поступают импульсы с тактового генератора 12, на выходах логической схемы «И» 13, связанных с датчиками 1, 3 и 4, будут формироваться тактовые импульсы, которые поступят на соответствующие входы счетчиков 14, которые начнут отсчет времени. На выходе логической схемы «И» 13, связанной со 2-м датчиком, импульсы отсутствуют, так как на первом входе этой схемы будет низкий логический уровень ЛОГ.0, и следовательно, счетчик 14 этого канала не запустится.
Звуковая акустическая волна, распространяясь внутри измерительной камеры, последовательно достигает датчиков 1, 3 и 4. Сигналы с этих датчиков через соответствующие усилители 8, управляемые одновибраторы 9 поступает на входы четырехвходовой логической схемы «И» 10 и на первые единичные входы триггеров управления 11. Так как управляемый одновибратор 9, связанный с датчиком 2, удерживает вход логической схемы «И» 10 в низком состоянии ЛОГ.0, а выход в высоком логическом состоянии ЛОГ.1, изменение на других входах этой логической схемы не вызывает изменения ее состояния на выходе, а следовательно, и на счетных входах триггеров управления 11. Приход низкого логического уровня ЛОГ.0 в каналах, связанных с датчиками 1, 3 и 4, на единичные входы триггеров управления 11 вследствие срабатывания управляемых одновибраторов 9 в этих каналах приведет к тому, что триггеры управления 11 перейдут в другое устойчивое состояние, при котором на выходах, связанных с двухвходовыми логическими схемами «И» 13, установится низкий логический уровень ЛОГ.0. В результате прекратится работа счетчиков 14 в каналах, связанных с датчиками 1,3 и 4. Таким образом, в канале 1 (датчик 1) будет зафиксирован временной интервал Δt1, в канале 3 - Δt3, в канале 4 - Δt4. В канале, связанном с датчиком 2, счетчик не запускался, следовательно, Δt2=0.
Зафиксированные временные интервалы в счетчиках 14 передаются в блок вычисления координат 15. После вычисления координат результаты стрельбы наблюдаются на мониторе 16, а документирование их осуществляется принтером 17. После вычисления координат с управляющего выхода блока вычисления координат 15 выдается сигнал на вторые входы управляемых одновибраторов 9 и на входы «Сброс» счетчиков 14, приводя устройство в исходное состояние для приема информации от следующего выстрела.
При стрельбе пули могут попадать в различные зоны мишени. Устройство будет работать аналогично описанному выше, только в этом случае запускаться будет тот датчик, к которому придет первой звуковая волна.
Таким образом, определение координат попадания пуль осуществляется с высокой точностью и надежностью во всем температурном диапазоне использования данного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГИСТРАЦИИ КООРДИНАТ ПОПАДАНИЯ ПО МИШЕНИ И АКУСТИЧЕСКАЯ ЭЛЕКТРОННАЯ МИШЕНЬ | 2024 |
|
RU2832398C1 |
| Устройство для считывания графической информации | 1978 |
|
SU746614A1 |
| Устройство для геоэлектроразведки | 1979 |
|
SU828151A1 |
| Устройство для регистрации сейсмических колебаний | 1983 |
|
SU1166035A1 |
| Устройство контроля уровня кусковых материалов в подземных емкостях | 1975 |
|
SU558168A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО ЛОГИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ, ЭЛЕКТРОННЫМИ КЛЮЧАМИ И СИГНАЛИЗАЦИЕЙ | 1996 |
|
RU2106676C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОВЫМ ВОЖДЕНИЕМ МАШИН | 1999 |
|
RU2172085C2 |
| ЦИФРОВОЙ ЧАСТОТОМЕР | 1996 |
|
RU2097774C1 |
| СПОСОБ ТРЕНИРОВКИ СТРЕЛКА НА СТЕНДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2046272C1 |
| Устройство генерации импульсов управления шаговым двигателем с электронной коррекцией | 1991 |
|
SU1829022A1 |
Изобретение относится к мишенным комплексам, а именно к устройствам для определения точности попадания пуль при стрельбе преимущественно из стрелкового боевого и спортивного оружия в открытых и закрытых тирах. Технический результат - повышение точности и надежности определения координат попадания пуль независимо от климатических условий (температуры и плотности) окружающей среды. Устройство содержит мишень в виде прямоугольной рамы, спереди и сзади закрытой резиновыми экранами, образующими измерительную камеру. Внутри камеры расположены четыре акустических датчика, соединенных с усилителями, и блок вычисления координат. Выходы усилителей подключены к блоку вычисления координат попадания пуль через блок измерения временных интервалов. 2 ил.
Устройство для определения координат попадания пуль, содержащее мишень, выполненную в виде прямоугольной рамы, закрытой спереди и сзади замкнутой резиновой лентой с образованием измерительной камеры, внутри которой расположены четыре акустических датчика, выходы которых соединены с усилителями, и блок вычисления координат попадания, отличающееся тем, что оно снабжено блоком измерения временных интервалов, при этом выходы усилителей подключены к блоку вычисления координат попадания пуль через блок измерения временных интервалов, включающий четыре управляемых одновибратора, четырехвходовую логическую схему «И», четыре триггера управления, четыре двухвходовые логические схемы «И», четыре счетчика и тактовый генератор, причем выходы усилителей через управляемые одновибраторы подключены к четырехвходовой логической схеме «И» и единичным входам триггеров управления, при этом выход четырехвходовой логической схемы «И» подключен к счетным входам триггеров управления, прямые выходы триггеров управления подключены к первым входам двухвходовых логических схем «И», вторые входы которых связаны с тактовым генератором, а выходы этих двухвходовых логических схем «И» подключены к входам счетчиков, выходы которых связаны с блоком вычисления координат попадания, кроме того, управляющий выход блока вычисления координат попадания связан со вторыми входами управляющих одновибраторов и входами «Сброс» счетчиков.
| Устройство для разогрева | 1977 |
|
SU691514A1 |
| Цифровой демодулятор частотно-манипулированных сигналов | 1982 |
|
SU1058083A1 |
| DE 3412326 A1, 31.10.1990 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА ИЗВЕСТНЫХ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ | 1993 |
|
RU2078353C1 |

