Изобретение относится к средствам контроля параметров процесса бурения скважин, а точнее к устройствам регистрации таких параметров, как частота вращения ротора, наработка и температура забойных двигателей (ЗД), в том числе, винтовых забойных двигателей и турбобуров для вертикального, наклонно-направленного и горизонтального бурения скважин. Также оно может применяться в других процессах и механизмах, где необходимо отслеживать вращение объекта или такое вращение является характеристикой времени работы (наработки) объекта.
В настоящее время существуют различные системы контроля и измерения режимов бурения, в частности системы и регистраторы для подсчета времени наработки ЗД.
Известен неавтономный регистратор числа оборотов вала (частоты вращения вала) забойного двигателя по патенту РФ №2285120, кл. Е21В 45/00, опубл. 2006 г. Для реализации его работы нужно протягивать кабель питания, что значительно усложняет конструкцию. Кроме этого в процессе регистрации частоты вращения вала при измерении вращения участвует вектор естественного магнитного поля Земли, что подразумевает определенную ориентацию устройства относительно Земли. При бурении же магнитных и некоторых других пород они могут оказывать мешающее влияние на вектор направленности магнитного поля Земли, а значит - привести к искажениям результатов.
Известен автономный забойный регистратор силовых параметров забойных двигателей, состоящий из установленного в буровой колонне корпуса, выполненного в виде переводника с содержанием контейнера электронного блока и элемента питания, многоканального элемента силовых параметров. Электронный блок содержит многоканальный усилитель, многоканальный аналого-цифровой преобразователь (АЦП), процессор и оперативное запоминающее устройство (ОЗУ) (Патент РФ №2131973, кл. Е21В 44/00, опубл. 1999 г.). Недостатком этого устройства является недостаточная информативность, т.к. ОЗУ регистрирует только осевую нагрузку на долото.
Наиболее близким к предлагаемому техническому решению является регистратор забойных параметров (Патент РФ №2296218, кл. Е21В 44/00, опубл. 2007 г.), содержащий корпус с установленным в нем элементом питания и смонтированным на плате электронным блоком, снабженным микропроцессором, в котором программируется управляющая программа, измерительным элементом - акселерометром плоскостей Х и Y, энергонезависимой микросхемой памяти, таймером календарного времени, датчиком температуры, портом ввода-вывода информации на компьютер с помощью интерфейса связи. Выход микропроцессора соединен с первым входом энергонезависимой микросхемы памяти. На первый вход микропроцессора подключен акселерометр плоскостей Х и Y, на второй вход - таймер календарного времени, а третий вход подключен к выходу датчика температуры, вход которого связан с элементом питания. Вход-выход порта ввода-вывода данных подключен к микропроцессору, вход порта ввода-вывода подключен к блоку питания. Причем вход таймера календарного времени, четвертый вход микроконтроллера и вход акселерометра подключены ко второму входу энергонезависимой микросхемы памяти.
Существенным недостатком указанного известного регистратора является то, что частота вращения ротора двигателя рассчитывается косвенным методом, а именно по ускорению и силе вибрации, в результате чего не обеспечивается высокая точность и достоверность установления таких параметров, как наработка и частота вращения забойного двигателя. Акселерометр плоскостей Х и Y - это прибор, который измеряет ускорение, и, следовательно, частоту вращения в этом случае можно определить лишь путем математической обработки с потерей точности.
Кроме того, любая вибрация (например, при транспортировании, при хранении, при монтаже устройства в ротор забойного двигателя и др.), создаваемая механической системой (механизмом), также является ускорением, которое воспринимает акселерометр плоскостей Х и Y, что приведет к еще большей потере точности установления частоты вращения, а в некоторых случаях, при определенном положении плоскостей Х и Y относительно вектора силы тяжести Земли и высоком уровне вибрации, к недостоверности полученных результатов.
Вместе с этим при использовании в известном регистраторе для определения частоты вращения двигателя показателя ускорения большое влияние на измерение этого интегрированного ускорения будет оказывать положение осей акселерометра относительно направления силы тяжести Земли (g), и в некоторых случаях при определенном положении осей Х и Y акселерометра по отношению к указанному вектору силы тяжести можно неверно рассчитать скорость вращения, так как при совпадении одной из осей акселерометра с вектором силы тяжести составляющая проекции ускорения по этой оси будет отсутствовать. Все эти факторы снижают точность и достоверность установления забойных параметров.
Технический результат, достигаемый при осуществлении заявляемого изобретения, заключается в повышении точности и достоверности измерения наработки и частоты вращения забойного двигателя за счет исключения влияния на процесс измерения силы тяжести Земли, за счет расширения диапазона чувствительности измерительного элемента и за счет исключения влияния на измеряемые параметры «паразитных» вращений двигателя при транспортировке, сборке, хранении.
Дополнительным техническим результатом является создание малогабаритного и надежного в работе устройства с технологическим запасом по габаритным размерам.
Указанный технический результат достигается предлагаемым регистратором наработки и частоты вращения забойного двигателя, содержащим корпус с установленным в нем элементом питания и электронным блоком, выполненным на плате и включающим следующие электронные компоненты: узел, в котором программируется управляющая программа, со встроенными датчиком температуры и таймером календарного времени, измерительный элемент, энергонезависимую микросхему памяти и порт ввода-вывода данных, вход-выход которого подключен к узлу, в котором программируется управляющая программа, при этом указанные электронные компоненты соединены друг с другом посредством системы связей «вход-выход», причем согласно изобретению в качестве измерительного элемента электронный блок содержит, по меньшей мере, один гироскоп, ось чувствительности которого параллельна плоскости платы электронного блока, установленной в корпусе вдоль его продольной оси, и одновременно ось чувствительности имеет угловое смещение на величину угла от более 0° до 90° относительно продольной оси корпуса, а в качестве узла, в котором программируется управляющая программа, электронный блок содержит микроконтроллер, в котором программируется управляющая программа, со встроенными аналого-цифровым преобразователем АЦП, датчиком температуры и таймером календарного времени, а также электронный блок дополнительно содержит преобразователь напряжения измерительного элемента и, по меньшей мере, один буферный усилительный элемент, причем упомянутая система связи «вход-выход» указанных электронных компонентов электронного блока выполнена следующим образом: на входы микроконтроллера подключены выходы энергонезависимой микросхемы памяти и буферного усилительного элемента, а два входа последнего соединены соответственно с выходом измерительного элемента - гироскопа и с выходом преобразователя напряжения гироскопа, вход которого подключен к выходу микроконтроллера, а напряжение питания с выхода элемента питания подано на входы энергонезависимой микросхемы памяти, преобразователя напряжения гироскопа и микроконтроллера.
Количество буферных усилительных элементов в электронном блоке соответствует количеству измерительных элементов - гироскопов.
При наличии в электронном блоке более одного гироскопа и более одного буферного усилительного элемента каждая последующая пара: гироскоп - буферный усилительный элемент электрически подсоединена к предыдущей паре параллельно.
Угловое смещение оси чувствительности гироскопа относительно продольной оси корпуса обеспечивается путем разворота гироскопа при его монтаже в электронном блоке.
Указанный технический результат достигается за счет следующего.
Регистратор наработки и частоты вращения обычно устанавливается в забойный двигатель таким образом, что его ось (продольная ось корпуса) и ось вращения двигателя совпадают. Благодаря тому что в предлагаемом регистраторе в качестве измерительного элемента используют гироскоп, обеспечивается возможность производить определение частоты вращения вала (ротора) забойного двигателя напрямую, без осуществления математических вычислений, как это происходит в прототипе. В результате повышается точность замеряемых параметров.
Ориентирование оси чувствительности гироскопа с угловым смещением относительно продольной оси корпуса устройства (т.е. ось чувствительности гироскопа параллельна плоскости платы, на которой смонтирован электронный блок, и в то же время ее направление в пространстве не совпадает с продольным направлением корпуса, т.е. она повернута на некоторый угол от продольной оси корпуса регистратора) обеспечивает также исключение совпадения ее направления с продольной осью вала забойного двигателя.
Следует пояснить, что если гироскоп расположить так, что его ось чувствительности будет совпадать с осью вращения двигателя, то тогда чувствительность всего регистратора будет равна чувствительности гироскопа. При этом верхний диапазон измерения ограничивается верхним диапазоном измерения угловой скорости самого гироскопа. Например, если максимальная угловая скорость гироскопа ωmах гир=360°/с, то верхний предел измерения всего устройства будет равен ωmах устр= ωmax гиp=360°/с=60 oб/мин. Увеличить верхний диапазон измерения можно, располагая ось чувствительности гироскопа под углом к оси вращения корпуса (двигателя), что выразится в формуле:
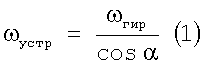
где ωустр - угловая скорость, замеряемая регистратором;
ωгир - угловая скорость, замеряемая гироскопом;
α - угол смещения направления оси чувствительности гироскопа относительно продольной оси корпуса.
В предлагаемом конструктивном исполнении имеет место вышеуказанная формула (1). Тогда, например, если верхний предел измерения гироскопа 360°/с, т.е. 60 об/мин, то при установке электронного блока в корпусе вдоль его продольной оси, но при угловом смещении оси чувствительности гироскопа относительно продольного направления корпуса, например, на угол 80°, то верхний предел измеряемой угловой скорости ротора забойного двигателя будет равен:

Изменяя углы смещения оси чувствительности гироскопа относительно продольного направления корпуса регистратора, можно изменять предел измерения предлагаемым регистратором максимальной угловой скорости (максимальных оборотов) забойного двигателя. При меньшем пределе измерений увеличивается чувствительность регистратора и возрастает точность на низких частотах вращения (порядка единиц оборотов в минуту), при большем пределе измерений точность устройства сдвигается в область более высоких частот вращения. Таким образом, изменением угла смещения оси чувствительности измерительного элемента относительно продольной оси корпуса можно сдвигать нижний и верхний пределы чувствительности предлагаемого регистратора, что расширяет его технологические возможности.
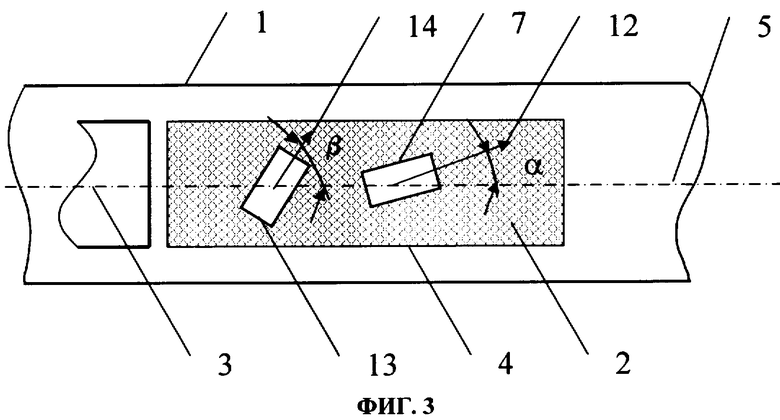
Расширить диапазон измеряемых частот можно, совместив в одном регистраторе, например, два гироскопа и установив их так, чтобы оси их чувствительностей одновременно были параллельны плате электронного блока и в то же время находились под разными углами смещения относительно продольной оси корпуса (продольной оси вращения вала двигателя). Это достигается, например, монтажом.
Применение в предлагаемом регистраторе в качестве измерительного элемента гироскопа позволяет исключить из процесса измерения влияние силы тяжести и магнитного поля Земли. То есть расположение заявляемого регистратора в пространстве может быть произвольным, но забойные параметры, связанные с вращением и определяемые с его помощью, характеризуются высокой точностью.
Выполнение в предлагаемом регистраторе электронного блока в виде указанной блок-схемы также обеспечивает повышение точности и достоверности измерения параметров наработки и частоты вращения двигателя благодаря следующему.
Установка в электронном блоке в качестве измерительного элемента гироскопа позволяет напрямую измерять частоту вращения двигателя, в то время как акселерометр в известном блоке измеряет этот показатель косвенным методом по вектору силы тяжести и силе вибрации. В этом случае акселерометр воспринимает не только полезную, но и другую вибрацию, не связанную с вращением, например, при транспортировании, хранении, монтаже устройства в ротор забойного двигателя, что может значительно повлиять на точность и качество измерения. А в предлагаемом регистраторе будет исключено указанное побочное влияние на измеряемые показатели, что повышает их достоверность.
Наличие преобразователя напряжения гироскопа позволяет запитывать гироскоп более высоким напряжением, получая больший размах напряжения на выходе гироскопа, тем самым повышая чувствительность всего устройства.
Дополнительный буферный усилительный элемент обеспечивает масштабирование высокого выходного напряжения от гироскопа в напряжение, которое можно подавать на вход АЦП микроконтроллера.
Введение в электронный блок предлагаемого электронного модуля микроконтроллера, который представляет собой микросхему со встроенными АЦП, датчиком температуры и таймером календарного времени, обеспечивает сбор данных с гироскопа (гироскопов), их преобразование, синхронизирует время с программным обеспечением, управляет режимом записи данных в энергонезависимую память и связь с портом для передачи данных на компьютер.
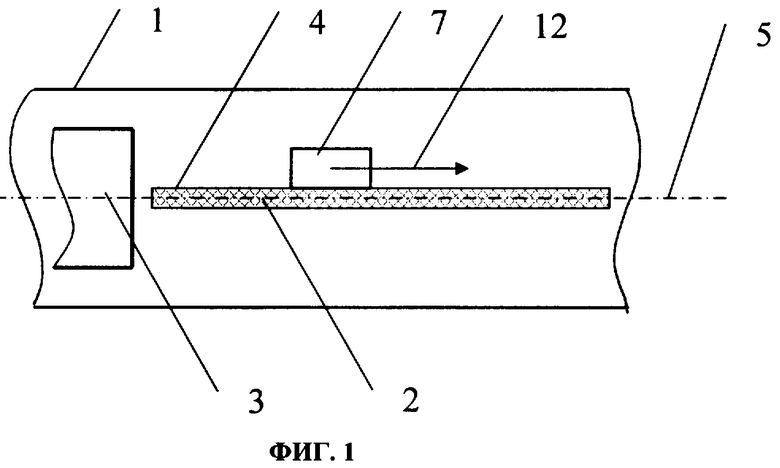
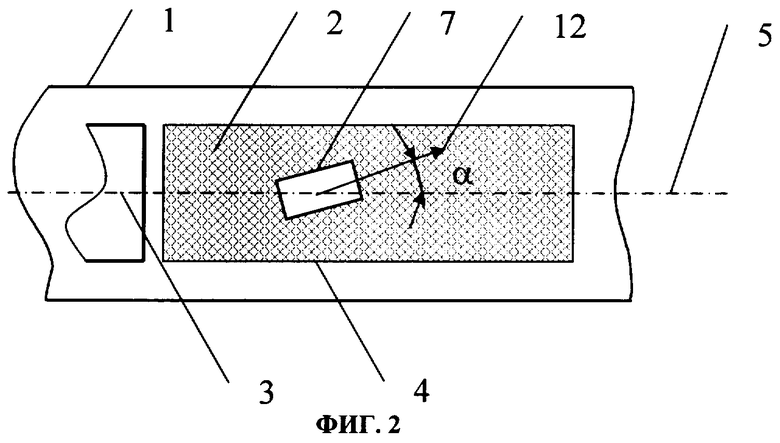
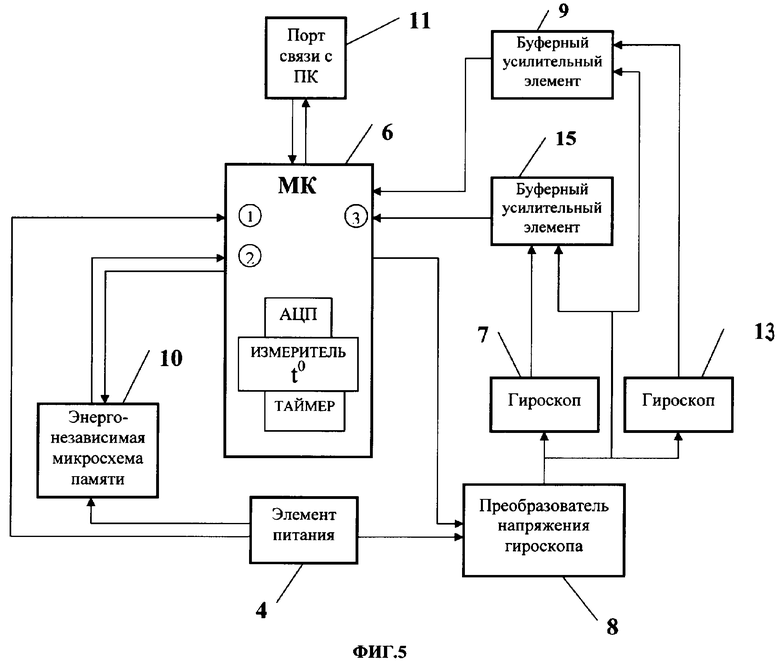
Заявляемое изобретение иллюстрируется чертежами, где на фиг.1 изображена схема установки платы с электронным блоком в корпусе регистратора (вид сбоку); на фиг.2 - схема установки платы с электронным блоком с одним гироскопом в корпусе регистратора (вид сверху); на фиг.3 - схема установки платы с электронным блоком с двумя гироскопами в корпусе регистратора (вид сверху); на фиг.4 - принципиальная схема электронного блока регистратора с одним гироскопом; на фиг.5 - принципиальная схема электронного блока регистратора с двумя гироскопами.
Предлагаемый регистратор наработки и частоты вращения забойного двигателя включает корпус 1 и электронный модуль, состоящий из электронного блока 2 и элемента питания 3. Электронный блок 2 смонтирован на плате 4. Плата 4 с электронным блоком 2 установлена внутри корпуса 1 регистратора вдоль его продольной оси 5. С одного торца корпуса 1 по резьбе заворачивается крышка, которая фиксирует электронный блок и элемент питания в корпусе от продольного перемещения, и гайка.
Используемый в предлагаемом регистраторе электронный модуль состоит из элемента питания 3 и электронного блока 2. Последний (фиг.4) содержит микроконтроллер 6 со встроенными АЦП, датчиком температуры и таймером календарного времени. В упомянутом микроконтроллере 6 «прошита» управляющая программа. Также электронный блок 2 содержит измерительный элемент - гироскоп 7, преобразователь 8 напряжения гироскопа 7, буферный усилительный элемент 9, энергонезависимую микросхему 10 памяти и порт 11 ввода-вывода данных, вход-выход которого подключен к микроконтроллеру 6. Все указанные электронные компоненты электронного блока 2 соединены друг с другом посредством системы связей «вход-выход», а именно: выход буферного усилительного элемента 9 соединен с входом микроконтроллера 6, а его первый вход - с выходом гироскопа 7, второй вход - с выходом преобразователя 8 напряжения гироскопа 7. Выход преобразователя 8 напряжения гироскопа связан также с входом гироскопа 7. Элемент питания 3 соединен с входами энергонезависимой микросхемы 10 памяти, преобразователя 8 напряжения гироскопа 7 и микроконтроллера 6.
При наличии в электронном блоке более одного гироскопа и более одного буферного усилительного элемента каждая последующая пара: гироскоп - буферный усилительный элемент электрически подсоединена к предыдущей паре гироскоп - буферный усилительный элемент параллельно (фиг.5). При этом с выхода преобразователя напряжения преобразованное напряжение подано на входы гироскопов и буферных усилительных элементов.
При монтаже электронного блока 2 гироскоп 7 установлен таким образом, чтобы его ось чувствительности 12 была параллельна плоскости платы 4 и в то же время имела угловое смещение в этой же плоскости на острый угол α относительно продольного направления корпуса 1. Также можно в электронном блоке 2 установить, например, два гироскопа 7 и 13 (фиг.3) таким же образом, чтобы их оси чувствительности 12 и 14 были параллельны плоскости платы 4 и в то же время имели угловое смещение в этой же плоскости на угол α и β соответственно относительно продольной оси корпуса 1.
Предлагаемый регистратор работает следующим образом.
Регистратор посредством заглушки и стопорных резиновых колец устанавливается и закрепляется в отверстии ротора винтового забойного двигателя. Двигатель опускают в скважину. При запуске его в работу вал двигателя начинает вращаться. При этом происходит синхронное вращение корпуса 1 устройства с ротором двигателя. Микроконтроллер 6 по заданному алгоритму управляющей программы обрабатывает сигнал с гироскопа 7 (или с гироскопов 7 и 13) через буферный усилительный элемент 9 (или через буферные элементы 9 и 15), производит регистрацию в энергонезависимой микросхеме 10 памяти данных о частоте вращения вала двигателя, данных датчика температуры и даты с временем записи от таймера календарного времени. Периодичность запроса и обработка сигнала программируется перед компоновкой предлагаемого регистратора на валу двигателя.
При остановке работы двигателя предлагаемый регистратор переходит в спящий режим. После отработки двигателя его поднимают из скважины и отправляют на ремонт, где во время разборки извлекают заявляемый регистратор, снимают с его корпуса торцевую крышку и соединяют электронный модуль через порт 11 ввода-вывода с компьютером (указанный порт необходим для подключения электронного модуля через интерфейс связи к персональному компьютеру), осуществляют считывание данных регистрации и дальнейшую обработку данных, а также обнуляют энергонезависимую микросхему 10 памяти. Полученные данные о наработке, частоте вращения и температуре используют для анализа работы забойного двигателя в реальных условиях бурения.
Программное обеспечение, устанавливаемое на компьютер, реализовано таким образом, что в подсчете наработки и формировании отчета учитываются только те вращения, которые непосредственно связаны с работой двигателя, остальные вращения отфильтровываются. Одновременно с этим на получаемых графиках можно отследить частоту вращения, температуру, напряжение источника питания и наработку за любой период времени.
В качестве измерительного элемента можно использовать, например, механические гироскопы марки ENC-03J с ориентацией оси чувствительности параллельно плате (в качестве измерительного элемента можно использовать также различные другие виды и типы гироскопов). В качестве элемента питания применяется литиевая батарея напряжением 3,6В.
Предложенный регистратор может с высокой степенью точности напрямую регистрировать такие параметры забойных двигателей, как частота вращения, температура и наработка, исключая воздействие таких факторов, как магнитное поле Земли и ускорение свободного падения (сила тяжести), а также различные «паразитные» вибрации.
Устройство автономно, компактно, просто в изготовлении и может устанавливаться и в других механизмах, где необходимо замерять время вращения и отслеживать само вращение.
Кроме этого технологически с выпуском более миниатюрных элементов возможно уменьшение габаритов изделия, а также, при необходимости, добавление дополнительных чувствительных элементов (таких, например, как датчик давления и др.) и компоновка их в одном регистраторе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ НАРАБОТКИ И ЧАСТОТЫ ВРАЩЕНИЯ ЗАБОЙНОГО ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2008 |
|
RU2368771C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ НАРАБОТКИ И ЧАСТОТЫ ВРАЩЕНИЯ ЗАБОЙНОГО ДВИГАТЕЛЯ И ЭЛЕКТРОННЫЙ МОДУЛЬ ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ | 2008 |
|
RU2371573C1 |
| РЕГИСТРАТОР ЗАБОЙНЫХ ПАРАМЕТРОВ | 2005 |
|
RU2296218C1 |
| МАЛОГАБАРИТНАЯ УПРАВЛЯЕМАЯ ВРАЩАЮЩАЯСЯ РАКЕТА | 2014 |
|
RU2561319C1 |
| РЕГИСТРАТОР ЗАБОЙНЫХ ПАРАМЕТРОВ | 2007 |
|
RU2336415C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| БЛОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И ВКЛЮЧАЮЩАЯ ЕГО СИСТЕМА ВИЗУАЛИЗАЦИИ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2336496C1 |
| Инерциальный измерительный прибор летательного аппарата на микромеханических датчиках и способ повышения его точности | 2015 |
|
RU2615018C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
Изобретение относится к средствам контроля параметров процесса бурения скважин. Техническим результатом является повышение точности и достоверности измерения наработки и частоты вращения забойного двигателя. Регистратор содержит корпус с установленным в нем элементом питания и электронным блоком, выполненным на плате и включающим следующие электронные компоненты: узел, в котором программируется управляющая программа, со встроенными датчиком температуры и таймером календарного времени, измерительный элемент, энергонезависимую микросхему памяти и порт ввода-вывода данных, вход-выход которого подключен к узлу, в котором программируется управляющая программа. При этом указанные электронные компоненты соединены друг с другом посредством системы связей «вход-выход». В качестве измерительного элемента электронный блок содержит, по меньшей мере, один гироскоп, ось чувствительности которого параллельна плоскости платы электронного блока, установленной в корпусе вдоль его продольной оси, и одновременно ось чувствительности имеет угловое смещение на величину острого угла от более 0° до менее 90° относительно продольной оси корпуса, а в качестве узла, в котором программируется управляющая программа, электронный блок содержит микроконтроллер, в котором программируется управляющая программа, со встроенными аналого-цифровым преобразователем АЦП, датчиком температуры и таймером календарного времени. Электронный блок дополнительно содержит преобразователь напряжения измерительного элемента и, по меньшей мере, один буферный усилительный элемент. 3 з.п. ф-лы, 5 ил.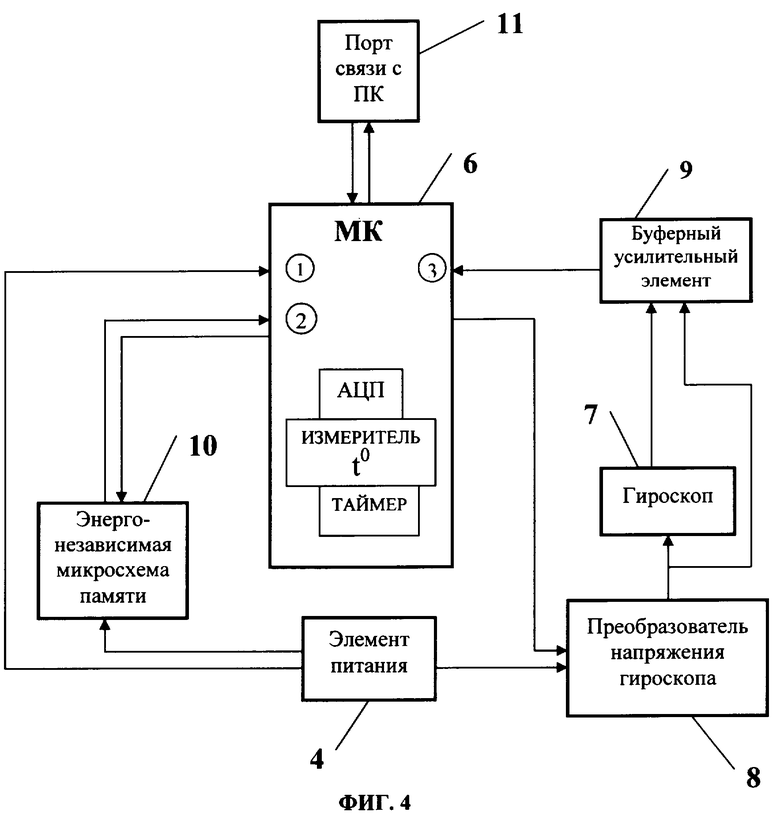
1. Регистратор наработки и частоты вращения забойного двигателя, содержащий корпус с установленным в нем элементом питания и электронным блоком, выполненным на плате и включающим следующие электронные компоненты: узел, в котором программируется управляющая программа, со встроенными датчиком температуры и таймером календарного времени, измерительный элемент, энергонезависимую микросхему памяти и порт ввода-вывода данных, вход-выход которого подключен к узлу, в котором программируется управляющая программа, при этом указанные электронные компоненты соединены друг с другом посредством системы связей «вход-выход», отличающийся тем, что в качестве измерительного элемента электронный блок содержит, по меньшей мере, один гироскоп, ось чувствительности которого параллельна плоскости платы электронного блока, установленной в корпусе вдоль его продольной оси, и одновременно ось чувствительности имеет угловое смещение на величину острого угла от более 0° до менее 90° относительно продольной оси корпуса, а в качестве узла, в котором программируется управляющая программа, электронный блок содержит микроконтроллер, в котором программируется управляющая программа, со встроенными аналого-цифровым преобразователем (АЦП), датчиком температуры и таймером календарного времени, а также электронный блок дополнительно содержит преобразователь напряжения измерительного элемента и, по меньшей мере, один буферный усилительный элемент, причем упомянутая система связи «вход-выход» указанных электронных компонентов электронного блока выполнена следующим образом: на входы микроконтроллера подключены выходы энергонезависимой микросхемы памяти и буферного усилительного элемента, а два входа последнего соединены соответственно с выходом измерительного элемента - гироскопа и с выходом преобразователя напряжения гироскопа, вход которого подключен к выходу микроконтроллера, а напряжение питания с выхода элемента питания подано на входы энергонезависимой микросхемы памяти, преобразователя напряжения гироскопа и микроконтроллера.
2. Регистратор по п.1, отличающийся тем, что количество буферных усилительных элементов в электронном блоке соответствует количеству измерительных элементов - гироскопов.
3. Регистратор по п.1, отличающийся тем, что при наличии в электронном блоке более одного гироскопа и более одного буферного усилительного элемента каждая последующая пара: гироскоп - буферный усилительный элемент, электрически подсоединена к предыдущей паре гироскоп -буферный усилительный элемент параллельно.
4. Регистратор по п.1, отличающийся тем, что угловое смещение оси чувствительности гироскопа относительно продольной оси корпуса обеспечивается путем разворота гироскопа при его монтаже в электронном блоке.
| РЕГИСТРАТОР ЗАБОЙНЫХ ПАРАМЕТРОВ | 2005 |
|
RU2296218C1 |
| Измеритель числа оборотов вала | 1977 |
|
SU651247A1 |
| Устройство для контроля частоты вращения вала турбобура | 1990 |
|
SU1719627A1 |
| Устройство для определения нагрузок в колонне бурильных труб | 1985 |
|
SU1273515A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧИСЛА ОБОРОТОВ ВАЛА ЗАБОЙНОГО ДВИГАТЕЛЯ | 2004 |
|
RU2285120C2 |
| АВТОНОМНЫЙ ЗАБОЙНЫЙ РЕГИСТРАТОР СИЛОВЫХ ПАРАМЕТРОВ | 1997 |
|
RU2131973C1 |
| US 6142228 A, 07.11.2000 | |||
| US 5226332 А, 13.07.1993. | |||

