Изобретение относится к измерительной технике, в частности к навигационным приборам, и может найти применение в системах навигации подвижных объектов, в мобильных комплексах наблюдений, в состав которых входят микромеханические гироскопы-акселерометры.
Из уровня техники известна система отслеживания, включающая одну или более единиц прослеживания, каждая из которых связана с человеком, содержит один или более акселерометров и один или более гироскопов; центральный пункт управления для демонстрации местоположения, по меньшей мере, одной из единиц прослеживания. Центральный пункт управления определяет местоположение, основанное на определении контрольной точки и, по крайней мере, одной единицы прослеживания данных от акселерометров и гироскопа, он обеспечивает информацию о местоположении и расстоянии и суммированную информацию о расстоянии и местоположении (MX РА03004475, 17.05.2004).
Известны универсальный навигационный прибор управления движением на основе микромеханических чувствительных элементов и унифицированная интегрированная бесплатформенная инерциальная навигационная система для этого прибора. Прибор содержит защитный корпус с выводами, в котором размещены интегрированная бесплатформенная инерциальная навигационная система, содержащая размещенные в корпусе микромеханические гироскопы и акселерометры, плату чувствительных элементов и схему обработки информации с чувствительных элементов. В нее введены плата микроконтроллера бесплатформенного инерциального блока (БИБ), плата микроконтроллера бесплатформенной инерциальной навигационной системы (БИНС) и, по меньшей мере, две платы микромеханических гироскопов и/или акселерометров, установленные перпендикулярно плате чувствительных элементов и жестко скрепленные с ней с образованием правой системы координат осей чувствительности микромеханических гироскопов и акселерометров. Платы микроконтроллеров БИБ и БИНС установлены параллельно плате чувствительных элементов и прикреплены друг к другу и корпусу посредством полых амортизационных электроизолирующих втулок и винтов, проходящих через сквозные отверстия в платах и этих втулках (RU 2263282, 27.10.2005).
Известна инерционная навигационная система, содержащая инерционные датчики типа акселерометров и гироскопов. Инерционные датчики сигналы выхода представляют движением перемещающегося тела. Сигналы могут требовать исправления из-за неоднородности и других ошибок инерционных датчиков. Инерционное устройство может получить сигналы от инерционных датчиков и обработать сигналы так, чтобы, обрабатывая сигналы, инерционная система, по крайней мере, признала выходной сигнал датчика. Инерционная система коррелирует сигналы, которые были выходными от инерционных датчиков в отобранное время для преобразования сигналов в желательную навигационную систему входа (WO 2004/029549, 08.04.2004).
Наиболее близким аналогом заявленного изобретения является система параметров движения, содержащая две антенны для получения навигационных сигналов, комплект блоков измерения движения. Блок измерения движения включает акселерометры и гироскопы, микроконвертер, который переводит данные в цифровую форму от акселерометров и гироскопов, накапливает наборы переведенных в цифровую форму данных и включает данные синхронизации, указывающие период GPS, обеспеченный приемником GPS (US 2005004748, 06.01.2005).
Недостатками этих решений является низкая точность измерения движения подвижного объекта, большие габариты устройств.
Задача, на решение которой направлено предложенное изобретение, заключается в создании блока бесплатформенной системы ориентации, включающей его системы визуализации и регистрации движения подвижных объектов, которые исключали бы указанные выше недостатки.
Технический результат, достигаемый при реализации данного изобретения, заключается в повышении точности работы и измерения движения объектов за счет распределенной и комплексной обработки информации для расчета параметров движения объекта, снижении погрешностей при измерении, уменьшении потребляемой мощности, исключении быстрого нагрева элементов конструкции за счет снижения выделения тепла в микроконтроллере и аналого-цифровых преобразователях, а также в повышении технологичности конструкции.
Данный технический результат достигается в блоке бесплатформенной системы ориентации, состоящем из микроконтроллера, интерфейсной платы и трех измерительных блоков, каждый из которых содержит микромеханический гироскоп и акселерометр, выходы каждого гироскопа и акселерометра соединены с соответствующими входами аналого-цифровых преобразователей, входы каждого гироскопа соединены с соответствующими выходами цифроаналоговых преобразователей, при этом каждый гироскоп и акселерометр расположены в измерительном блоке на отдельных печатных платах, причем измерительная ось гироскопа перпендикулярна плоскости печатной платы и параллельна оси опорной декартовой системы координат, а измерительные оси акселерометра параллельны плоскости печатной платы и соответствующим осям опорной декартовой системы координат.
На печатной плате гироскопа установлены аналого-цифровой и цифроаналоговый преобразователи.
На печатной плате акселерометра установлен аналого-цифровой преобразователь.
Плата гироскопа и плата акселерометра расположены параллельно друг другу.
Указанный технический результат достигается в системе визуализации и регистрации движения подвижных объектов, содержащей устройство коммутации, блок системы сбора и передачи данных, осуществляющий сбор измеряемых данных с, по меньшей мере, одного блока бесплатформенной системы ориентации и обмен информации с вычислительным устройством бесплатформенной навигационной системы, получающим информацию о параметрах движения, по меньшей мере, одного объекта от вычислительного устройства системы позиционирования, состоящей из передатчиков системы позиционирования и базовых приемников системы позиционирования, обеспечивающих прием сигналов от передатчиков системы позиционирования, вычислительное устройство системы визуализации и регистрации движения, получающее информацию о значении линейных и угловых координат объектов от вычислительного устройства бесплатформенной навигационной системы, при этом блок бесплатформенной системы ориентации состоит из микроконтроллера, интерфейсной платы и трех измерительных блоков, каждый из которых содержит микромеханический гироскоп и акселерометр, выходы каждого гироскопа и акселерометра соединены с соответствующими входами аналого-цифровых преобразователей, входы каждого гироскопа соединены с соответствующими выходами цифроаналоговых преобразователей, при этом каждый гироскоп и акселерометр расположены в измерительном блоке на отдельных печатных платах, причем измерительная ось гироскопа перпендикулярна плоскости печатной платы и параллельна оси опорной декартовой системы координат, а измерительные оси акселерометра параллельны плоскости печатной платы и соответствующим осям опорной декартовой системы координат.
Блок системы сбора и передачи данных состоит из вычислительного устройства сбора и передачи данных, беспроводной локальной вычислительной сети, состоящей из адаптера приемопередатчика и точки доступа.
На печатной плате гироскопа установлены аналого-цифровой и цифроаналоговый преобразователи.
На печатной плате акселерометра установлен аналого-цифровой преобразователь.
Плата гироскопа и плата акселерометра расположены параллельно друг другу.
Вычислительное устройство бесплатформенной навигационной системы выполнено с возможностью алгоритмической компенсации погрешностей микромеханических гироскопов и акселерометров.
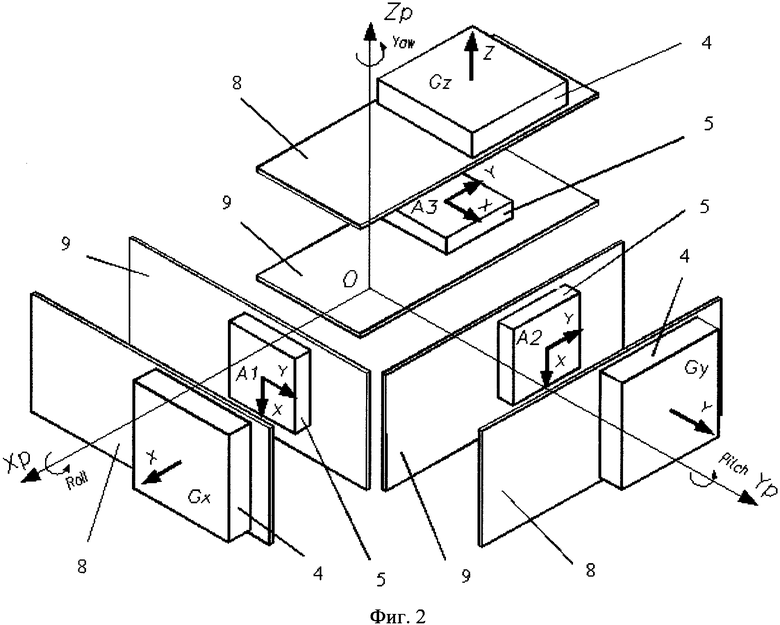
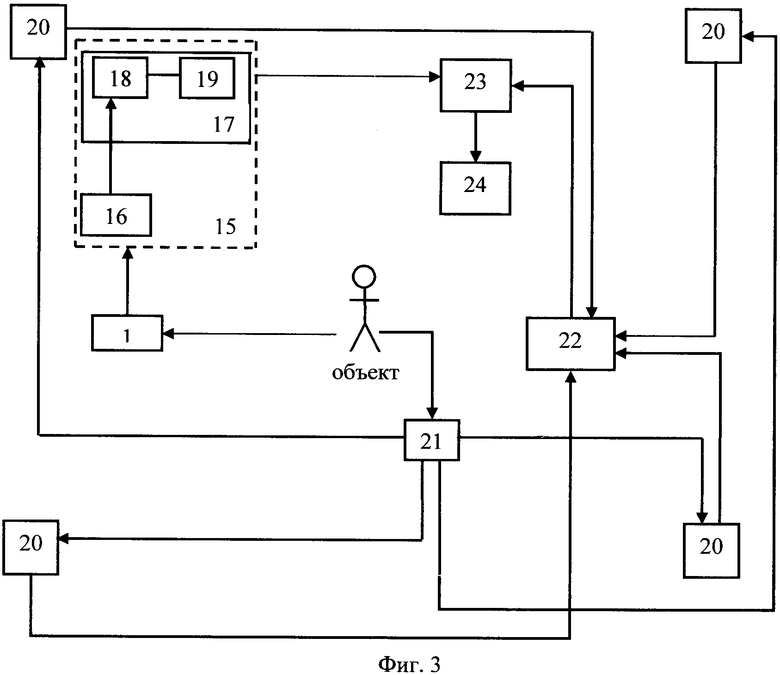
Сущность изобретения поясняется чертежами, где на фиг.1 изображена функциональная схема блока бесплатформенной системы ориентации; на фиг.2 показано расположение измерительных блоков бесплатформенной системы ориентации относительно опорной декартовой системы координат XpYpZp; на фиг.3 - функциональная схема системы визуализации и регистрации движения подвижных объектов.
Блок 1 бесплатформенной системы ориентации состоит из микроконтроллера 2, интерфейсной платы 3 и трех измерительных блоков 10.
Каждый измерительный блок 10 содержит микромеханический гироскоп 4 и акселерометр 5, аналого-цифровой преобразователь 6 (АЦП) и цифроаналоговый преобразователь 7 (ЦАП). Каждый гироскоп и акселерометр расположены в измерительном блоке на отдельных печатных платах 8 и 9 соответственно.
Печатные платы выполняют роль конструктивных элементов.
Система визуализации и регистрации движения подвижных объектов содержит устройство коммутации (УК), блок 15 системы сбора и передачи данных (ССПД), по меньшей мере, один блок 1 бесплатформенной системы ориентации (БСО), системы позиционирования (СП), состоящей из базовых приемников 20 системы позиционирования (БПСП), передатчиков 21 системы позиционирования (ПСП) и вычислительного устройства 22 системы позиционирования (ВУ СП), вычислительное устройство 23 бесплатформенной навигационной системы (ВУ БНС), вычислительное устройство 24 системы визуализации и регистрации движения (ВУ СВРД).
ССПД 15 состоит из вычислительного устройства 16 сбора и передачи данных (ВУ СПД), беспроводной локальной вычислительной сети 17 (БЛВС), состоящей из адаптера 18 приемопередатчика (АПП) и точки доступа 19 (ТД).
Гироскопы 4 (Gx, Gy, Gz) - датчики угловой скорости, акселерометры 5 (A1, A2, A3) - датчики линейного ускорения.
Гироскопы 4 представляют собой микромеханические датчики (MEMS) ADXRS фирмы Analog Devices с аналоговым выходным сигналом UG, пропорциональным угловой скорости датчика вокруг его измерительной оси. Дополнительно гироскоп формирует аналоговый сигнал опорного напряжения UREF, относительно которого должно производиться выходное напряжение UG, и аналоговый сигнал UT, пропорциональный температуре кристалла датчика. Гироскопы 4 электрически соединены с соответствующими 2-х канальными сигма-дельта АЦП 6, например AD7705, так, что опорное напряжение UREF гироскопа 4 поступает на вход опорного напряжения REF АЦП 6. Выходные сигналы гироскопов 4 UG и UT, пропорциональные угловой скорости и температуре, поступают на входы IN1 и IN2 соответствующих АЦП 6. Гироскопы 4 имеют специальный вход для напряжения UКОМР компенсации напряжения смещения нуля датчика. Эти входы гироскопов 4 подключены электрически к выходам соответствующих ЦАП 7, например AD5310. Каждый гироскоп 4, АЦП 6 и ЦАП 7 установлены на отдельной печатной плате 8 - плате гироскопа. Причем измерительная ось гироскопа 4 перпендикулярна плоскости, на которую он монтируется на печатную плату 8.
Акселерометры 5 представляют собой двухосные микромеханические датчики (MEMS) ADXL фирмы Analog Devices или LIS2L02 фирмы STMicroelectronics с аналоговым выходным сигналом UG, пропорциональным линейному ускорению вдоль соответствующей измерительной оси датчика. Акселерометры 5 электрически соединены с соответствующими 2-х канальными сигма-дельта АЦП 6 так, что выходные сигналы акселерометров 5 UAX и UАу поступают на входы IN1 и IN2 соответствующих АЦП 6. На входы опорного напряжения REF АЦП 6 подается напряжение, равное половине напряжения питания акселерометров UPS. Акселерометры 5 и АЦП 6 установлены соответственно на печатных платах 9 - платах акселерометров. Причем измерительные оси акселерометров 5 параллельны плоскостям соответствующих печатных плат 9, на которые они установлены.
Плата гироскопа 8 и плата акселерометра 9 монтируются параллельно друг другу и образуют измерительный блок 10.
Каждый измерительный блок 10 монтируется на печатную плату 11, содержащую управляющий микроконтроллер 2 (например, микроконтроллер AT89C51ED2 фирмы Atmel). Плоскости печатных плат 8, 9 двух измерительных блоков 10 располагаются перпендикулярно печатной плате 11, при этом плоскости печатных плат этих двух измерительных блоков 10 располагаются перпендикулярно друг другу. Плоскости печатных плат 8, 9 третьего измерительного блока 10 располагаются параллельно плоскости печатной платы 11, при этом к выводам микроконтроллера 2 электрически подключаются выводы АЦП 6 гироскопов и акселерометров, а также ЦАП 7. Для подключения АЦП 6 и ЦАП 7 к микроконтроллеру 2 используются выводы SPI последовательного порта микроконтроллера 2. Кроме этого, с вывода Р1.0 микроконтроллера 2 на все АЦП 6 подается тактовый сигнал. Выбор устройства, которое в текущий момент времени подключается к микроконтроллеру 2, осуществляется с помощью линий CS соответствующих АЦП 6 и линий SYNC ЦАП 7. Информация о готовности данных АЦП 6 поступает в микроконтроллер 2 по линиям DRDY АЦП 6. Для подачи тестовых сигналов ST1 и ST2 на гироскопы 4 и акселерометры 5 используются соответствующие сигналы микроконтроллера 2. Для индикации работы микроконтроллера 2 на плате 11 установлен светодиод 25, электрически подключенный к микроконтроллеру.
На плате 11 дополнительно устанавливается интерфейсная плата 3, которая содержит преобразователь интерфейса RS-485 12, стабилизатор напряжения питания 13 и инвертор 14. Интерфейсная плата 3 располагается перпендикулярно плоскости печатной платы 11. Преобразователь интерфейса 12, стабилизатор напряжения питания 13 и инвертор 14 электрически соединены с соответствующими цепями платы 11. Выход инвертора 14 соединен с входами управления RE и DE преобразователя интерфейса 12.
Направление измерительной оси Х гироскопа 4 - Gx совпадает с направлением оси Хр. Измерительная ось Х акселерометра 5 - А1 совпадает с направлением оси Yp, a измерительная ось Y этого акселерометра противоположно направлена оси Zp. Направление измерительной оси Y гироскопа 4 - Gy совпадает с направлением оси Yp. Измерительная ось Х акселерометра 5 - А2 противоположно направлена оси Zp, a измерительная ось Y этого акселерометра противоположно направлена оси Yp. Направление измерительной оси Z гироскопа 4 - Gz совпадает с направлением оси Zp. Измерительная ось Х акселерометра 5 - A3 совпадает с направлением оси Yp, а измерительная ось Y этого акселерометра противоположно направлена оси Хр. Из-за неизбежных погрешностей монтажа гироскопов 4 и акселерометров 5, а также их базовых погрешностей каждая из их измерительных осей будет отклонена от соответствующей оси Хр, Yp, Zp на малый угол, который можно в пространстве охарактеризовать двумя малыми независимыми величинами.
Монтаж платы 8 гироскопа и платы 9 акселерометра в измерительный блок 10 осуществляется посредством распайки в отверстия плат штыревого соединителя, который обеспечивает и электрическое соединение цепей. Этот же штыревой соединитель служит для монтажа соответствующего измерительного блока 10 на плате 11 микроконтроллера 2. На плате 11 устанавливается металлическая втулка с резьбовым отверстием, с помощью которой осуществляется механическая фиксация блока измерения движения на объекте или основании.
Система визуализации и регистрации движения подвижных объектов предназначена для регистрации и визуализации в реальном масштабе времени движения объектов.
БСО 1 устанавливается на объекте и обеспечивает автономными методами измерение проекций вектора абсолютной угловой скорости и проекций вектора кажущегося ускорения объекта в связанной с датчиками системе координат и позволяет выполнить измерение в реальном масштабе времени следующих параметров:
- ωX - угловая скорость крена объекта;
- ωY - угловая скорость рысканья объекта;
- ωZ - угловая скорость тангажа объекта;
- аX - продольное ускорение объекта;
- aY - вертикальное ускорение объекта;
- аZ - поперечное ускорение объекта;
- ТBSO - температура датчиков блока системы ориентации;
- tBSO - относительный момент времени, в который проводилось измерение параметров.
ССПД 15 организует сбор данных, измеряемых бесплатформенной системой ориентации, и участвует в организации обмена информацией с вычислительным устройством бесплатформенной навигационной системы и состоит:
- ВУ СПД 16 осуществляет сбор данных с блока бесплатформенной системы ориентации и обеспечивает обмен информацией с вычислительным устройством бесплатформенной навигационной системы. ВУ СПД 16 выполнено на базе мобильного промышленного компьютера типа PC-104 или ему подобного, который должен иметь минимум два дополнительных последовательных порта:
- последовательный порт типа RS-485 обеспечивает обмен информацией с блоком бесплатформенной системы ориентации;
- последовательный порт типа USB (протокол USB 2.0) обеспечивает подключение адаптера приемопередатчика беспроводной локальной вычислительной сети к вычислительному устройству сбора и передачи данных;
- БЛВС 17 обеспечивает функционирование беспроводной локальной вычислительной сети для обмена информацией по протоколу TCP/IP между вычислительным устройством сбора и передачи данных и вычислительным устройством бесплатформенной навигационной системы. Беспроводная локальная вычислительная сеть состоит: АПП 18 - обеспечивает канал приема и передачи информации с вычислительным устройством сбора и передачи данных и точкой доступа беспроводной локальной вычислительной сети (приемопередатчики локальной вычислительной сети (ПП БЛВС)); ТД 19 - обеспечивает канал приема и передачи информации адаптера приемопередатчика беспроводной локальной вычислительной сети с вычислительным устройством бесплатформенной навигационной системы (Подключение осуществляется через устройство коммутации).
СП - обеспечивает радиотехническими методами (используется технология сверхширокополосных сигналов) измерение текущего значения линейных и приращение угловых координат объекта относительно заданной базовой точки и обеспечивает измерение следующих параметров движения объектов:
- z - текущее значение бокового отклонения объекта относительно базовой точки;
- у - текущее значение высоты объекта относительно базовой точки;
- х - текущее значение дальности объекта относительно базовой точки;
- δψ - приращение угла рысканья объекта;
- δϑ - приращение угла тангажа угла объекта;
- δγ - приращение угла крена объекта;
- tSP - относительный момент времени, в который проводилось измерение параметров.
СП состоит: БПСП 20 - обеспечивают прием сигналов, поступающих от передатчиков системы позиционирования, и реализуют алгоритмы обработки информации, обеспечивающей измерение линейных и приращение угловых координат объекта в реальном масштабе времени, находящегося в зоне действия базовых приемников системы позиционирования; ПСП 21 - устанавливаются на объекте и обеспечивают передачу сигналов, которые позволяют определить текущее значение линейных координат и приращение угловых координат объекта; ВУ СП 22 - обеспечивает решение следующих задач:
- управление функционированием локальной вычислительной сети, обеспечивающей обмен информацией между элементами системы;
- управление функционированием базовых приемников и передатчиков системы позиционирования;
- расчет линейных и угловых координат объектов, измеренных системой позиционирования;
- компенсация погрешностей определения линейных и угловых координат объектов, измеренных системой позирования;
- обеспечение передачи данных о линейных и угловых координатах объектов, измеренных системой позиционирования, в вычислительное устройство бесплатформенной навигационной системы.
ВУ СП 22 выполнено на базе типового переносного или стационарного компьютера, который должен иметь устройство (сетевую карту) для подключения к локальной вычислительной сети с помощью устройства коммутации.
ВУ БНС 23 обеспечивает решение следующих задач:
- обеспечение функционирования локальной вычислительной сети, обеспечивающей обмен информацией между элементами системы;
- обеспечение функционирования беспроводной локальной вычислительной сети, обеспечивающей обмен информацией между вычислительным устройством бесплатформенной навигационной системы и вычислительным устройством сборами передачи данных;
- управление системой сбора и передачи данных блоков бесплатформенной системы ориентации;
- получение данных от системы сбора и передачи данных блоков бесплатформенной системы ориентации;
- получение информации о параметрах движения объектов от вычислительного устройства системы позиционирования;
- компенсацию погрешностей измерения датчиков бесплатформенной системы ориентации;
- вычисление угловых и линейных координат объектов по информации, измеренной блоками бесплатформенной системы ориентации;
- повышение точности определения угловых и линейных координат объектов методами комплексной обработки информации измеренной блоками бесплатформенной системы ориентации и системы позиционирования;
- передачу информации о значении линейных и угловых координат объектов в вычислительное устройство системы визуализации и регистрации движения.
ВУ БНС 23 выполнено на базе типового переносного или стационарного компьютера, который должен иметь устройство (сетевая карта) для подключения к локальной вычислительной сети с помощью устройства коммутации и с возможностью алгоритмической компенсации погрешностей микромеханических гироскопов и акселерометров.
ВУ СВРД 24 обеспечивает решение следующих задач:
- обеспечение функционирования локальной вычислительной сети, обеспечивающей обмен информацией между элементами системы;
- прием информации о значении линейных и угловых координат объектов от вычислительного устройства бесплатформенной навигационной системы;
- визуализацию движения объектов;
- регистрацию параметров движения объектов.
ВУ СВРД 24 выполнено на базе типового переносного или стационарного компьютера, который должен иметь устройство (сетевая карта) для подключения к локальной вычислительной сети с помощью устройства коммутации.
УК обеспечивает соединение элементов системы в единую локальную вычислительную сеть следующих устройств:
- точка доступа беспроводной локальной вычислительной сети;
- вычислительное устройство бесплатформенной навигационной системы;
- базовые приемники системы позиционирования;
- вычислительное устройство системы позиционирования;
- вычислительное устройство визуализации и регистрации движения.
В качестве УК могут использоваться типовые блоки SWITH (HUB), поддерживающие стандартный протокол обмена данными TCP/IP и обеспечивающие скорость передачи данных от 100 Mbit/c.
Система функционирует следующим образом:
1. Блоки бесплатформенной системы ориентации и передатчики системы позиционирования крепятся в характерных точках объекта, координаты которых определяются пользователем системы,
1.1. координаты крепления блоков бесплатформенной системы ориентации передатчиков системы позиционирования вводятся в программу приема данных, которая выполняется в вычислительном устройстве бесплатформенной навигационной системы:
1.2. координаты крепления блоков бесплатформенной системы ориентации передатчиков системы позиционирования вводятся в программу визуализации и регистрации движения объектов, которая выполняется в вычислительном устройстве визуализации и регистрации движения.
2. Блоки бесплатформенной системы ориентации выполняют измерение проекций кажущегося ускорения и вектора абсолютной угловой скорости объекта в реальном масштабе времени:
2.1. блок системы сбора и передачи с заданной частотой и в заданной последовательности осуществляет сбор измеренных параметров с блоков бесплатформенной системы;
2.2. блок системы сбора и передачи с заданной частотой и в заданной последовательности осуществляет передачу данных в вычислительное устройство бесплатформенной навигационной системы.
3. Параллельно базовые приемники системы позиционирования осуществляют:
3.1. прием сигналов, поступающих с передатчиков системы позиционирования;
3.2. выполняют первичную обработку информацию о текущем значении линейных и приращении угловых координат объекта;
3.3. передают с требуемой частотой обработанную информацию в вычислительное устройство системы позиционирования.
4. Программы, функционирующие в вычислительном устройстве системы позиционирования, обеспечивают:
4.1. прием информации о первичной информации о параметрах движения объекта от базовых приемников системы позиционирования;
4.2. расчет текущего значения линейных и приращения угловых координат объекта;
4.3. алгоритмическую компенсацию погрешностей измерения;
4.4. передачу информации о параметрах движения объекта в вычислительное устройство бесплатформенной навигационной системы.
5. Параллельно программы, выполняемые в вычислительном устройстве бесплатформенной навигационной системы, обеспечивают:
5.1. прием информации, переданной системой сбора и передачи информации;
5.2. алгоритмическую компенсацию погрешностей датчиков блока бесплатформенной системы ориентации;
5.3. расчет параметров движения объектов по информации, измеренной датчиками блока бесплатформенной системы ориентации;
5.4. прием информации о параметрах движения объектов с вычислительного устройства системы позиционирования;
5.5. синхронизация информации, измеренной блоками бесплатформенной системы ориентации и системой позиционирования;
5.6. вычисление текущего значения линейных угловых и приращения угловых координат объекта методами комплексной обработки информации;
5.7. передача текущего значения линейных и приращение угловых координат объектов в вычислительное устройство визуализации и регистрации движения.
6. Параллельно программы, выполняемые в вычислительном устройстве визуализации и регистрации движения, обеспечивают:
6.1. получение текущего значения линейных и приращение угловых координат объектов из вычислительного устройства системы позиционирования;
6.2. визуализацию движения объектов;
6.3. регистрацию движения объектов;
6.4. интеграцию данных о параметрах движения объекта с программами пользователя.
При подаче напряжения питания на стабилизатор напряжения питания 13 последний начинает вырабатывать стабилизированное напряжение питания для всех устройств блока. При поступлении на микроконтроллер 2 стабилизированного напряжения питания происходит автоматический сброс микроконтроллера 2 и начинает выполняться программа, записанная в программную память микроконтроллера 2. После сброса микроконтроллера 2 АЦП 6 и ЦАП 7 блоки находятся в выключенном состоянии, а преобразователь интерфейса 12 включен в режим приема данных с линии, что позволяет гарантировать работу других устройств, подключенных к ней. Далее работа измерительного блока 10 осуществляется под управлением микроконтроллера 2, выполняющего программу.
Первоначально осуществляется программная инициализация устройств микроконтроллера:
- таймеров Т0 и Т1, которые используются для отсчетов интервалов времени;
- таймера Т2, который используется в режиме формирования тактового сигнала для всех АЦП блока;
- последовательного порта UART, который используется для организации обмена данными посредством преобразователя интерфейса 12 между микроконтроллером 2 и внешним управляющим устройством;
- последовательного порта SPI, который используется для организации обмена данными между микроконтроллером и АЦП и ЦАП.
Далее происходит программная настройка каждого АЦП 6 в соответствии с режимом работы, параметры которого были сохранены в электрически перезаписываемой памяти микроконтроллера:
- осуществляется установка одинаковой частоты обновления данных всех АЦП;
- осуществляется автоматическая калибровка всех АЦП 6.
На следующем этапе производится программирование АЦП 6 в режим измерения сигналов гироскопов 4, пропорциональных их температуре. После этого производится измерение и вычисление температуры соответствующих гироскопов 4. Полученные данные используются для коррекции выходных сигналов соответствующих гироскопов 4.
После этого производится программная настройка АЦП 6 на режим измерения выходных сигналов гироскопов 4, пропорциональных их угловой скорости, и заданных каналов акселерометров 5. Задание рабочих каналов акселерометров 5 осуществляется в соответствии с режимом, параметры которого были сохранены в электрически перезаписываемой памяти микроконтроллера 2.
Следующим шагом является проверка функционирования датчиков движения (гироскопов 4 и акселерометров 5) измерительного блока 10. Для этого на входы самотестирования гироскопов 4 и акселерометров 5 подаются соответствующие управляющие сигналы. При этом производится измерение с помощью соответствующих АЦП 6 выходных сигналов гироскопов 4 и акселерометров 5. По результатам измерений выходных сигналов гироскопов 4 и акселерометров 5 осуществляется расчет изменений их выходных сигналов под воздействием тестовых сигналов. Результаты сравниваются с данными, которые были сохранены в электрически перезаписываемой памяти микроконтроллера. По результатам этого сравнения делается вывод о работоспособности гироскопов 4 и акселерометров 5 блока 10.
После проверки функционирования датчиков движения блока 10 производится синхронизация начала цикла измерения всех АЦП 6 и далее происходит синхронное измерение выходных сигналов датчиков угловой скорости - гироскопов 4 (Gx, Gy, Gz) и датчиков линейного ускорения - акселерометров 5 (A1, A2, A3). Результаты измерений выходных сигналов датчиков запоминаются в оперативной памяти микроконтроллера 2 и могут быть выданы во внешнее устройство по его команде через преобразователь интерфейса 12.
БСО 1 бесплатформенной навигационной системы обеспечивают измерение проекций вектора абсолютной угловой скорости и проекций вектора кажущегося ускорения объекта в связанной с датчиком системе координат. (Для коррекции погрешности измеренных значений БСО БНС предусмотрена возможность измерения температуры датчика).
ССПД 15 от БСО 1 обеспечивает сбор данных о параметрах движения объекта (теоретически возможен сбор данных от 32 БСО) и передачу данных в ВУ БНС 23. Передача данных реализуется с помощью БЛВС 17.
СП позволяет определить отклонения линейных координат объекта от базовой и приращения углов Эйлера, характеризующие ориентацию объекта. Данная информация поступает в ВУ СП 22, где проводится ее обработка для алгоритмической компенсации погрешностей определения положения объекта.
В ВУ БНС 23 проводится комплексная обработка информации полученной от датчиков системы ориентации и датчиков системы позиционирования и проводится вычисление текущих значений линейных и угловых координат объекта. Для повышения точности измерений проводится комплексная обработка информации.
В ВУ СВРД 24 по заданной модели объекта осуществляется на основе информации, полученной в ВУ БНС 23, визуализация и регистрация движения объекта.
Особенности построения и функционирования системы
1. Распределенная обработка информации, что позволяет:
- выполнять параллельную обработку информации, что позволяет обеспечить минимизацию требованиям к операционным ресурсам вычислительных устройств (компьютеров), выполняющих обработку информации в системе;
- облегчить разработку, отладку и тестирование программного обеспечения системы;
- упростить адаптацию системы к требованиям пользователей;
- снизить затраты на сервисное обслуживание элементов системы;
- обеспечить независимость модернизации аппаратного и программного обеспечения элементов системы.
2. Алгоритмическая компенсация погрешностей измерения датчиков блока бесплатформенной системы ориентации позволяет повысить точность измерения параметров движения объекта и, соответственно, использовать в качестве датчиков первичной информации дешевые микромеханические датчики угловой скорости и акселерометры. Это позволяет снизить стоимость элементов системы, потребляемую мощность и соответственно значительно уменьшить габариты и массу элементов системы, расположенных на объекте.
3. Алгоритмическая компенсация погрешностей измерения положения объектов, выполненных системой позиционирования, позволяет снизить стоимость элементов системы, потребляемую мощность и соответственно уменьшить габариты, массу элементов системы, расположенных на объекте.
4. Использование двух физически различных методов измерения положения объектов (инерциальных и радиотехнических) позволяет применить методы комплексной обработки информации, что позволяет обеспечить визуализацию и регистрацию, а не только изменение угловых координат объекта, но и линейных координат объекта.
5. Использование типовых программных и аппаратных средств позволяет:
- снизить стоимость разработки и эксплуатации системы;
- снизить стоимость программных и аппаратных средств системы;
- обеспечить простоту и удобство эксплуатации системы;
- выполнить интеграцию данных о параметрах движения объекта с программами пользователя.
Особенности функционирования БСО:
1) Так как каждый датчик (гироскоп и акселерометр) подключен к собственному прецизионному сигма-дельта АЦП, которые измеряют интегральное значение входного сигнала за заданное время измерения синхронно со всех датчиков, то это позволяет:
- повысить точность измерения выходного сигнала гироскопов и акселерометров и, соответственно, повысить точность работы блока;
- уменьшить мощность, потребляемую блоком, так как позволяет использовать микроконтроллер с низкой тактовой частотой за счет исключения большого объема вычислений при определении угловой скорости и линейного ускорения блока измерения движения.
2) Уменьшение мощности, потребляемой блоком, позволяет исключить быстрый нагрев элементов конструкции блока за счет снижения выделения тепла в микроконтроллере и АЦП. При малом тепловыделении в блоке температура гироскопов и акселерометров изменяется медленно, что позволяет более точно проводить температурную компенсацию их погрешностей.
Особенности конструкции БСО:
1) Каждый датчик (гироскоп и акселерометр) подключен к собственному прецизионному сигма-дельта АЦП. Сигма-дельта АЦП относятся к интегрирующим АЦП, которые измеряют интегральное значение входного сигнала за заданное время измерения. Использование интегрирующего АЦП для измерения выходного сигнала гироскопов и акселерометров позволяет повысить точность работы блока;
2) Все АЦП тактируются одним сигналом, который формируется микроконтроллером блока. Это позволяет обеспечить одновременное и синхронное измерение выходных сигналов всех датчиков блока, что повышает точность работы блока;
3) Каждый датчик совместно со своим АЦП установлен на отдельной печатной плате. Платы гироскопов и платы акселерометров представляют функционально законченные узлы. Это позволяет обеспечивать их тестирование до установки в блок измерения движения, что повышает технологичность конструкции блока;
4) Платы гироскопов являются конструктивно одинаковыми, что повышает технологичность конструкции блока;
5) Платы акселерометров являются конструктивно одинаковыми, что повышает технологичность конструкции блока;
6) Измерительный блок, состоящий из платы гироскопа и платы акселерометра, является функционально законченным узлом. Это позволяет обеспечивать его тестирование до установки в блок измерения движения, что повышает технологичность конструкции блока;
7) Конструкция измерительного блока, состоящего из платы гироскопа и платы акселерометра, которые располагаются параллельно друг другу, позволяет уменьшить размеры блока измерения движения за счет лучшего использования внутреннего пространства блока;
8) Расположение интерфейсной платы перпендикулярно плоскости платы микроконтроллера позволяет дополнительно уменьшить размеры блока измерения движения за счет дополнительного использования внутреннего пространства блока.
9) Использование для крепления блока на объекте специальной резьбовой втулки, которая установлена на плате микроконтроллера, позволяет уменьшить механическое воздействие на гироскопы и акселерометры. Механическое усилие, которое возникает при креплении блока на объекте, может непосредственно передаваться от места крепления блока на датчики (гироскопы и акселерометры).
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2430333C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| Спутниковая инерциальная навигационная система для станций спутниковой связи | 2024 |
|
RU2836126C1 |
| Инерциальный измерительный прибор летательного аппарата на микромеханических датчиках и способ повышения его точности | 2015 |
|
RU2615018C1 |
Изобретение относится к измерительной технике. Блок бесплатформенной системы ориентации содержит микроконтроллер, интерфейсную плату и три измерительных блока, каждый из которых содержит микромеханический гироскоп и акселерометр. Выходы каждого гироскопа и акселерометра соединены с соответствующими входами аналого-цифровых преобразователей, входы каждого гироскопа соединены с соответствующими выходами цифроаналоговых преобразователей. Каждый гироскоп и акселерометр расположены в измерительном блоке на отдельных печатных платах. Измерительная ось гироскопа перпендикулярна плоскости печатной платы и параллельна оси опорной декартовой системы координат, а измерительные оси акселерометра параллельны плоскости печатной платы и соответствующим осям опорной декартовой системы координат. Система визуализации и регистрации движения подвижных объектов содержит устройство коммутации, блок системы сбора и передачи данных, осуществляющий сбор измеряемых данных с, по меньшей мере, одного блока бесплатформенной системы ориентации и обмен информации с вычислительным устройством бесплатформенной навигационной системы, получающим информацию о параметрах движения, по меньшей мере, одного объекта от вычислительного устройства системы позиционирования, состоящей из передатчиков системы позиционирования и базовых приемников системы позиционирования, обеспечивающих прием сигналов от передатчиков системы позиционирования, вычислительное устройство системы визуализации и регистрации движения, получающее информацию о значении линейных и угловых координат объектов от вычислительного устройства бесплатформенной навигационной системы. Повышается точность работы и измерения движения объектов. 2 н. и 8 з.п. ф-лы, 3 ил.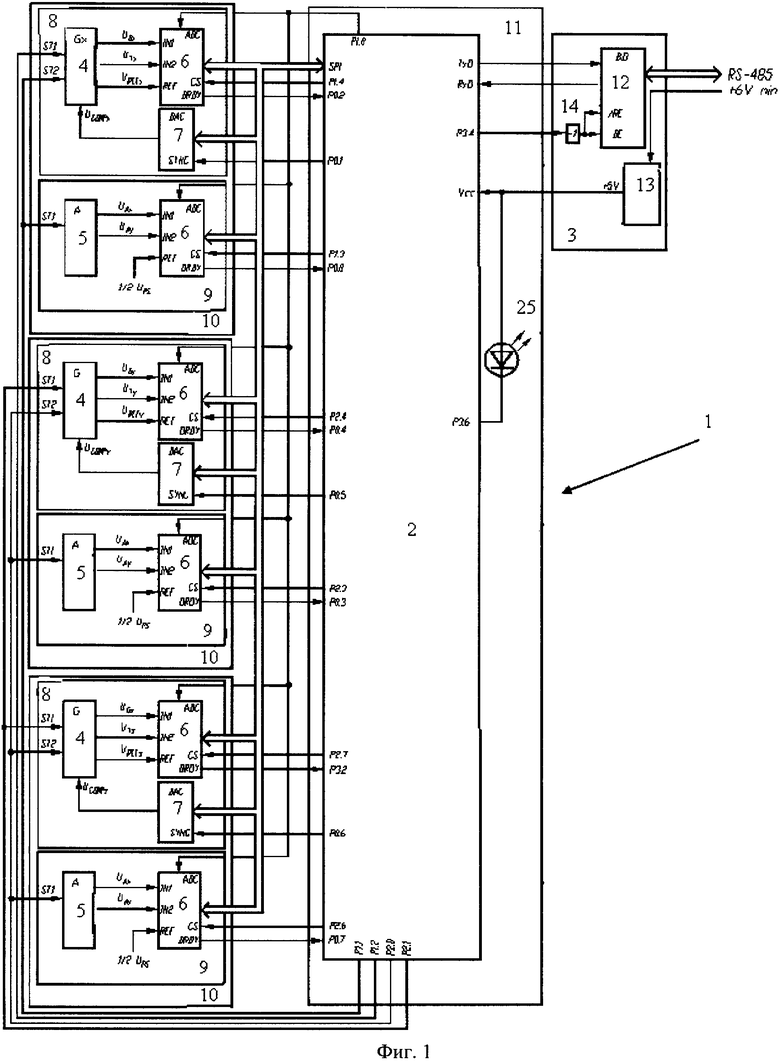
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| RU 2058534 С1, 20.04.1996 | |||
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| US 4601206 А, 22.07.1986 | |||
| WO 03069279 A3, 21.08.2003. | |||

