Изобретения относятся к области приборостроения, в частности к инерциальным информационно-измерительным приборам, и могут найти применение в системах ориентации и навигации подвижных объектов.
Известен трехосный микромеханический измеритель [1] параметров движения с минимальными габаритными размерами, содержащий корпус в виде шестигранного куба и электронные субблоки в виде крестообразных печатных плат двухступенчатой формы с размещенными на них радиоэлементами, микромеханическими гироскопами и акселерометрами, позволяющими осуществлять электрическую связь между указанными субблоками без навесных соединительных кабелей.
Недостатками данного измерителя является низкая точность измерения параметров движения и ограниченность его функциональных возможностей, обусловленные отсутствием вычислительного устройства и устройств для осуществления компенсации погрешностей выходных сигналов микромеханических датчиков.
Известен бесплатформенный инерциальный измерительный блок [2], содержащий микромеханические вибрационные гироскопы-акселерометры, датчики температуры, размещенный на основании, выполненном в виде правильной шестиугольной усеченной пирамиды, установленной на подложке, выполненной в виде платы из диэлектрика с установленными бескорпусными и корпусными элементами сервисной электроники, позволяющими увеличить количество используемых чувствительных элементов с трех до шести.
Недостатками бесплатформенного инерциального измерительного блока является техническая сложность реализации конструкции, обусловленная необходимостью точного соблюдения параметров основания, выполненного в виде правильной шестиугольной усеченной пирамиды, ограниченный диапазон рабочих температур, обусловленный техническими характеристиками применяемых микромеханических вибрационных гироскопов-акселерометров, а также низкая точность измерения параметров движения из-за отсутствия устройств определения и компенсации нулевого сигнала микромеханических гироскопов от ускорения и устройств, выполняющих роль амортизирующей платформы.
Наиболее близким по технической сущности к предлагаемому изобретению является унифицированная интегрированная бесплатформенная инерциальная навигационная система [3], входящая в состав универсального навигационного прибора управления движением, содержащая микромеханические гироскопы и акселерометры, датчики температуры, платы чувствительных элементов со схемой обработки информации и две платы микроконтроллеров.
Недостатком данной системы является ограниченный диапазон рабочих температур, обусловленный техническими характеристиками применяемых микромеханических датчиков, и низкая точность измерения параметров движения из-за отсутствия синхронизации информации с гироскопов и акселерометров, используемой при определении и компенсации нулевого сигнала микромеханических гироскопов от ускорения.
Известен способ [4] калибровки, позволяющий с высокой точностью определять масштабные коэффициенты, дрейфы нулевых сигналов и углы неточной установки измерительных осей трехкомпонентного гироскопического датчика угловых скоростей и блока акселерометров, заключающийся в определении угловой скорости дрейфа датчиков угловой скорости и углов неточной установки их измерительных осей, масштабных коэффициентов этих датчиков и блока акселерометров, сдвигов нулей и углов неточной установки измерительных осей акселерометров, а также в определении непараллельности трех измерительных осей датчиков соответствующим трем осям блока акселерометров.
Недостатком данного способа является отсутствие опроса всех гироскопических датчиков угловых скоростей и акселерометров в одни и тот же момент времени для определения величины составляющей нулевого сигнала датчиков угловой скорости гироскопов, возникающей из-за влияния ускорения.
Заявленное изобретение направлено на повышение точности инерциального измерительного прибора летательного аппарата (ЛА) и расширение его функциональных возможностей.
Поставленная задача решается за счет того, что в инерциальный измерительный прибор ЛА, состоящий из модуля чувствительных элементов, содержащего триаду одноосных микромеханических акселерометров, триаду одноосных микромеханических гироскопов и температурные датчики, закрепленные на поверхности или входящие в состав каждого микромеханического гироскопа и акселерометра, соединенные через устройства преобразования измерительных сигналов датчиков с вычислителем, и электронного модуля, содержащего устройство управления режимами работы, позволяющее переходить в режим калибровки датчиков, режим программирования контроллеров или режим работы, энергонезависимое запоминающее устройство, содержащее параметры моделей датчиков, определяемых на этапе калибровки, устройство информационного обмена с потребителем, при этом каждое из устройств соединено с вычислителем, в котором реализованы блок температурной компенсации и блок компенсации нелинейности масштабных коэффициентов микромеханических гироскопов и акселерометров по данным, определяемым на этапе калибровки, согласно изобретению дополнительно введены устройство синхронизации выходной информации инерциальных датчиков, устройство определения нулевого сигнала микромеханических гироскопов от ускорения и амортизирующая платформа, на которой устанавливается модуль чувствительных элементов, конструктивно выполненная в виде жесткого монолитного кронштейна, в основании которого установлены амортизаторы, причем полоса пропускания амортизаторов много меньше полосы пропускания микромеханических гироскопов и акселерометров, установленных на амортизирующей платформе, и много меньше частоты собственных колебаний чувствительных элементов микромеханических гироскопов и акселерометров, установленных на амортизирующей платформе.
Кроме того, в состав инерциального измерительного прибора ЛА, согласно изобретению введены нагревательные элементы, представляющие собой терморезисторы с положительным температурным коэффициентом сопротивления, закрепленные на каждом из микромеханических гироскопов и акселерометров, соединенные с устройством управления подогревом, позволяющим по команде с вычислителя осуществлять включение и отключение подогрева инерциальных датчиков для расширения диапазона рабочих температур инерциального измерительного прибора ЛА.
Кроме того, поставленная задача решается за счет реализации способа повышения точности инерциального измерительного прибора ЛА, заключающегося в определении величины составляющей нулевого сигнала микромеханических гироскопов, возникающей из-за влияния ускорения, в котором согласно изобретению по сигналу с устройства синхронизации выходной информации инерциальных датчиков, инициируемому вычислителем, в один и тот же момент времени опрашиваются все инерциальные датчики, в результате чего в устройство определения нулевого сигнала микромеханических гироскопов от ускорения поступают измерительные сигналы в виде цифрового кода с устройств преобразования, пропорциональные скорости вращения ЛА и пропорциональные линейным ускорениям ЛА, в результате чего определяется величина составляющей нулевого сигнала одноосных микромеханических гироскопов, которая поступает на вход вычислителя для дальнейшей коррекции значений угловой скорости.
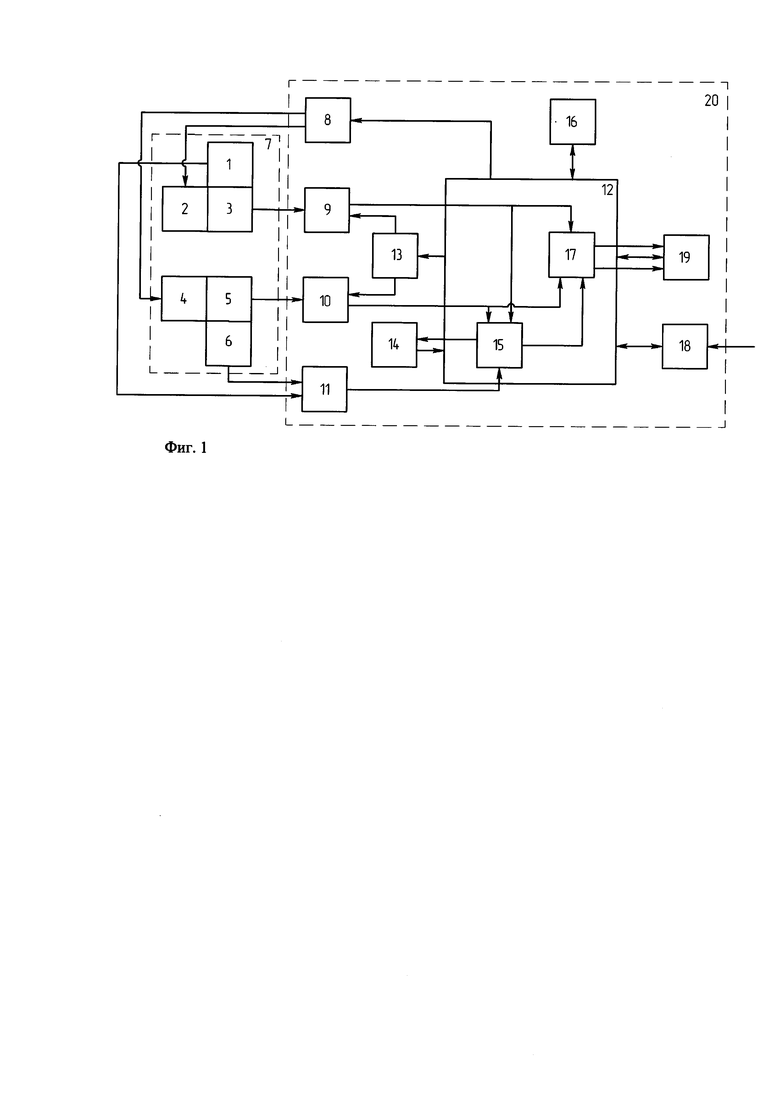
На фиг. 1 представлена схема инерциального измерительного прибора ЛА, который состоит из модуля чувствительных элементов, содержащего триаду микромеханических акселерометров 5, три датчика 6 температуры, закрепленных на поверхности или входящие в состав каждого акселерометра, три элемента 4 нагревательных, закрепленных на поверхности каждого акселерометра, триаду одноосных микромеханических гироскопов 3, три датчика 1 температуры, закрепленных на поверхности или входящие в состав каждого микромеханического гироскопа, три элемента 2 нагревательных, закрепленных на поверхности каждого микромеханического гироскопа, установленных на платформе 7 амортизирующей. На вход элементов 2, 4 нагревательных поступают команды с устройства 8 управления подогревом. Платформа 7 амортизирующая располагается отдельно от электронного модуля 20. Соединение располагаемых на платформе 7 амортизирующей элементов между собой, а также соединение с элементами, входящими в состав электронного модуля 20, осуществляется разъемными и неразъемными соединениями посредством ленточных кабелей и монтажных проводов.
Электронный модуль 20 содержит устройства 9, 10, 11 преобразования измерительных сигналов датчиков (например, преобразователи «напряжение - частота» для преобразования аналоговых сигналов, и преобразователи интерфейса RS422 в RS232 для преобразования цифровых сигналов), устройство 8 управления подогревом, устройство 13 синхронизации выходной информации инерциальных датчиков, устройство 14 определения нулевого сигнала микромеханических гироскопов от ускорения, энергонезависимое запоминающее устройство 16, устройство 18 управления режимами работы, устройство 19 информационного обмена с потребителями, при этом каждое устройство соединено с вычислителем 12.
Входы устройств 9 и 10 преобразования измерительных сигналов датчиков соответственно соединены с выходами триады микромеханических гироскопов 3, выходами триады микромеханических акселерометров 5 и выходом устройства 13 синхронизации выходной информации инерциальных датчиков, а выходы соединены со входом блока 15 температурной компенсации, реализуемым в вычислителе 12, а также соединены с устройством 19 информационного обмена с потребителем.
Входы устройства 11 преобразования измерительных сигналов датчиков соответственно соединены с выходами датчиков 1, 6 температуры, а выход соединен со входом блока 15 температурной компенсации, реализуемым в вычислителе 12.
На вход устройство 18 управления режимами работы поступают в автоматическом режиме сигналы от центральной вычислительной машины ЛА.
Заявленный инерциальный измерительный прибор ЛА обеспечивает автономное измерение угловых скоростей и линейных ускорений на оси, связанные с осями ЛА, и работает следующим образом.
Инерциальный измерительный прибор ЛА содержит корпус, в котором имеются две полости. В обеих полостях имеются конструктивные элементы в виде пазов, посадочных отверстий и направляющих для установки электронных компонентов и датчиков. В первой полости располагается платформа 7 амортизирующая, выполненная в виде жесткого монолитного кронштейна, в основании которого установлены амортизаторы и на котором располагаются триада одноосных микромеханических акселерометров 5, три датчика 6 температуры, закрепленных на поверхности или входящих в состав каждого акселерометра, три элемента 4 нагревательных, закрепленных на поверхности каждого акселерометра, триада одноосных микромеханических гироскопов 3, три датчика 1 температуры, закрепленных на поверхности или входящих в состав каждого микромеханического гироскопа, три элемента 2 нагревательных, закрепленных на поверхности каждого микромеханического гироскопа, причем полоса пропускания установленных амортизаторов много меньше полосы пропускания микромеханических гироскопов и акселерометров, и много меньше частоты собственных колебаний чувствительных элементов микромеханических гироскопов и акселерометров.
Установка микромеханических гироскопов и микромеханических акселерометров на едином жестком монолитном кронштейне, в основании которого расположены амортизаторы, позволяет существенно снизить влияние вибрации.
Измерение угловых скоростей и линейных ускорений осуществляется триадой одноосных микромеханических гироскопов 3 и триадой одноосных микромеханических акселерометров 5 соответственно. Сигналы с инерциальных датчиков, пропорциональные скорости вращения ЛА и пропорциональные линейным ускорениям ЛА, с помощью устройств преобразования 9 и 10 преобразуются в цифровой код. После подачи сигнала (строба синхронизации) с устройства 13 синхронизации выходной информации инерциальных датчиков, инициируемого вычислителем 12, в одни и тот же момент времени опрашиваются все инерциальные датчики, в результате чего измерительные сигналы в виде цифрового кода с устройств преобразования 9 и 10 поступают на вычислитель 12 в блок 15 температурной компенсации и в блок 17 компенсации нелинейности масштабных коэффициентов инерциальных датчиков.
В блоке 17 компенсации нелинейности масштабных коэффициентов инерциальных датчиков происходит пересчет значений масштабного коэффициента в зависимости от воздействующих в определенный момент времени угловых скоростей и линейных ускорений с учетом коэффициентов зависимостей, определяемых на этапе калибровки и хранящихся в энергонезависимом запоминающем устройстве 16.
В блоке 15 температурной компенсации происходит расчет масштабных коэффициентов и нулевых сигналов инерциальных датчиков с учетом коэффициентов температурной зависимости, определяемых на этапе калибровки и хранящихся в энергонезависимом запоминающем устройстве 16.
Полученные значения масштабных коэффициентов и нулевых сигналов инерциальных датчиков в виде сформированного массива данных поступают на вход устройства 14 определения нулевого сигнала микромеханических гироскопов от ускорения. В устройстве 14 определения нулевого сигнала микромеханических гироскопов от ускорения с помощью коэффициентов математических зависимостей, определяемых на этапе калибровки и хранящихся в энергонезависимом запоминающем устройстве 16, осуществляется определение величины составляющей нулевого сигнала угловой скорости, измеренного триадой одноосных микромеханических гироскопов 3, обусловленной влиянием линейного ускорения, измеренного триадой одноосных микромеханических акселерометров 5.
Рассчитанные в устройстве 14 определения нулевого сигнала микромеханических гироскопов от ускорения коэффициенты позволяют скомпенсировать погрешность измерения угловой скорости, вызванной влиянием ускорения.
На поверхности каждого микромеханического гироскопа и микромеханического акселерометра установлены температурные датчики, которые также могут входить в состав микромеханического гироскопа или микромеханического акселерометра. Информация с температурных датчиках поступает на устройство 11 преобразования измерительных сигналов, а затем на вычислитель 12. В вычислителе 12 осуществляется допусковый контроль, и в случае выхода получаемых значений температуры за пределы установленного в процессе калибровки допуска, на вход устройства 8 управления подогревом поступает команда включения. Устройство 8 управления подогревом активирует нагревательные элементы 2, 4, представляющие собой терморезисторы с положительным температурным коэффициентом сопротивления, которые остаются активными и осуществляют подогрев инерциальных датчиков до тех пор, пока с вычислителя 12 на вход устройства 8 управления подогревом не поступит команда отключения.
Реализуемые устройство 8 управления подогревом и нагревательные элементы 2, 4, представляющие собой терморезисторы с положительным температурным коэффициентом сопротивления, позволяют обеспечить работоспособность инерциальных датчиков при воздействии на инерциальный измерительный прибор ЛА пониженной температуры, превышающей нижний порог диапазона рабочей температуры применяемых микромеханических акселерометров и микромеханических гироскопов.
Предлагаемые изобретения расширяют функциональные возможности инерциального измерительного прибора ЛА и повысить точность измерения значений угловой скорости и линейного ускорения микромеханическими акселерометрами и микромеханическими гироскопами.
Источники информации
1. Патент РФ №2377576, МПК G01P 15/14, опубл. 27.12.2009 г.
2. Патент РФ №2162203, МПК G01C 21/00, опубл. 20.01.2001 г.
3. Патент РФ №2263282, МПК G01C 23/00, G01C 21/00, опубл. 27.10.2005 г. (прототип).
4. Патент РФ №2269813, МПК G05D 1/00, G01C 21/12, опубл. 10.02.2006 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерциальный измерительный преобразователь | 2024 |
|
RU2821240C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| Способ повышения точности калибровки блока микромеханических датчиков угловой скорости | 2019 |
|
RU2727344C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС | 2019 |
|
RU2718142C1 |
| СПОСОБ КАЛИБРОВКИ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ ПО КАНАЛУ АКСЕЛЕРОМЕТРОВ | 2011 |
|
RU2477864C1 |
| Способ калибровки погрешностей инерциального измерительного блока на базе лазерных гироскопов с использованием динамического стенда | 2021 |
|
RU2803878C2 |
Изобретение относится к области приборостроения, в частности к инерциальным информационно-измерительным приборам, и может найти применение в системах ориентации и навигации подвижных объектов. Сущность изобретения заключается в том, что в состав инерциального измерительного прибора летательного аппарата (ЛА) дополнительно введены устройство синхронизации выходной информации инерциальных датчиков, устройство определения нулевого сигнала микромеханических гироскопов от ускорения, и амортизирующая платформа, на которой устанавливается модуль чувствительных элементов, конструктивно выполненная в виде жесткого монолитного кронштейна, в основании которого установлены амортизаторы, причем полоса пропускания амортизаторов много меньше полосы пропускания микромеханических гироскопов и акселерометров, установленных на амортизирующей платформе, и много меньше частоты собственных колебаний чувствительных элементов микромеханических гироскопов и акселерометров, установленных на амортизирующей платформе. Технический результат – повышение точности инерциального измерительного прибора летательного аппарата (ЛА) и расширение его функциональных возможностей. 2 н. и 1 з.п. ф-лы, 1 ил.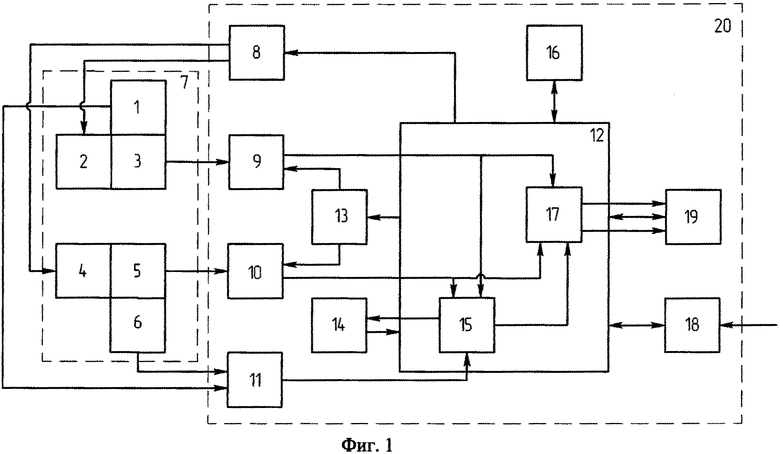
1. Инерциальный измерительный прибор летательного аппарата (ЛА), состоящий из модуля чувствительных элементов, содержащего триаду одноосных микромеханических акселерометров, триаду одноосных микромеханических гироскопов и температурные датчики, закрепленные на поверхности или входящие в состав каждого микромеханического гироскопа и акселерометра, соединенные через устройства преобразования измерительных сигналов датчиков с вычислителем, и электронного модуля, содержащего устройство управления режимами работы, позволяющее переходить в режим калибровки датчиков, режим программирования контроллеров или режим работы, энергонезависимое запоминающее устройство, содержащее параметры моделей датчиков, определяемых на этапе калибровки, устройство информационного обмена с потребителем, при этом каждое из устройств соединено с вычислителем, в котором реализованы блок температурной компенсации и блок компенсации нелинейности масштабных коэффициентов микромеханических гироскопов и акселерометров по данным, определяемым на этапе калибровки, отличающийся тем, что в его состав дополнительно введены устройство синхронизации выходной информации инерциальных датчиков, устройство определения нулевого сигнала микромеханических гироскопов от ускорения, и амортизирующая платформа, на которой устанавливается модуль чувствительных элементов, конструктивно выполненная в виде жесткого монолитного кронштейна, в основании которого установлены амортизаторы, причем полоса пропускания амортизаторов много меньше полосы пропускания микромеханических гироскопов и акселерометров, установленных на амортизирующей платформе, и много меньше частоты собственных колебаний чувствительных элементов микромеханических гироскопов и акселерометров, установленных на амортизирующей платформе.
2. Инерциальный измерительный прибор ЛА по п.1, отличающийся тем, что в его состав введены нагревательные элементы, представляющие собой терморезисторы с положительным температурным коэффициентом сопротивления, закрепленные на каждом из микромеханических гироскопов и акселерометров, соединенные с устройством управления подогревом.
3. Способ повышения точности инерциального измерительного прибора ЛА, заключающийся в определении величины составляющей нулевого сигнала микромеханических гироскопов, возникающей из-за влияния ускорения, отличающийся тем, что по сигналу с устройства синхронизации выходной информации инерциальных датчиков, инициируемому вычислителем, в одни и тот же момент времени опрашиваются все инерциальные датчики, в результате чего в устройство определения нулевого сигнала микромеханических гироскопов от ускорения поступают измерительные сигналы с устройств преобразования, после чего определяется величина составляющей нулевого сигнала одноосных микромеханических гироскопов, которая поступает на вход вычислителя для дальнейшей коррекции значений угловых скоростей.
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2006 |
|
RU2310166C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| US 20090326816 A1, 31.12.2009 | |||
| WO 2004029549 A2, 08.04.2004. | |||

