Изобретение относится к области радиолокации и может быть использовано в системах обнаружения с использованием отражения радиоволн путем сопоставления в одной системе координат двух и более расстояний.
Известно устройство обработки радиолокационных сигналов, состоящее из радиолокационного приемника, амплитудного селектора, блока анализа огибающей, индикатора, где выход радиолокационного приемника через амплитудный селектор, через блок анализа огибающей соединен с входом индикатора, блок счета времени нарастания и спада огибающей и вычитатель следующих друг за другом кодов, при этом выход блока анализа огибающей соединен с входом блока счета времени нарастания и спада огибающей, групповой выход которого соединен с групповым входом вычитателя следующих друг за другом кодов, имеющих групповой выход, соединенный с групповым входом индикатора (Патент РФ № 2096798, кл. G01S 5/00, опубл. 20.11.1997).
Недостатками данного устройства являются усложненная схема и невозможность измерения дальности и угловой координаты при наличии протяженного объекта. Протяженный объект представляет набор блестящих точек, распределенных по его поверхности. Протяженность объекта приводит к искажению диаграммы направленности. Она представляется как сумма диаграмм направленностей, полученных от каждой блестящей точки объекта. Это приводит к тому, что результирующая диаграмма направленности расширяется на величину, равную угловым размерам объекта.
Технической задачей заявляемого изобретения является упрощение схемы устройства и расширение функциональных возможностей за счет измерения угловой координаты и дальности как точечных, так и протяженных объектов.
Технический результат изобретения заключается в том, что в устройство обработки радиолокационных сигналов, содержащее радиолокационный приемник, амплитудный селектор и индикатор, причем выход радиолокационного приемника соединен с входом амплитудного селектора, дополнительно введены блок обработки, содержащий генератор импульсов, определитель полярности, первый, второй и третий элементы И, элемент ИЛИ, реверсивный счетчик, дифференцирующее устройство, инвертор, сдвиговый регистр и дешифратор, причем выходы дешифратора и третьего элемента И соединены с входами индикатора, выход генератора импульсов соединен с первыми входами соответственно первого, второго и третьего элементов И, вторые входы которых соединены соответственно с первым выходом определителя полярности, выходом инвертора и вторым выходом сдвигового регистра, выход амплитудного селектора соединен с входом блока обработки, вход дифференцирующего устройства соединен с входом блока обработки, а выход с входом определителя полярности, второй выход которого соединен с входом инвертора, выход которого соединен с вторым входом элемента ИЛИ, второй вход которого соединен с первым выходом определителя полярности, а выход - с входом сдвигового регистра, выход первого элемента И соединен с прямым входом реверсивного счетчика, реверсивный вход которого соединен с выходом второго элемента И, а выход - с входом дешифратора.
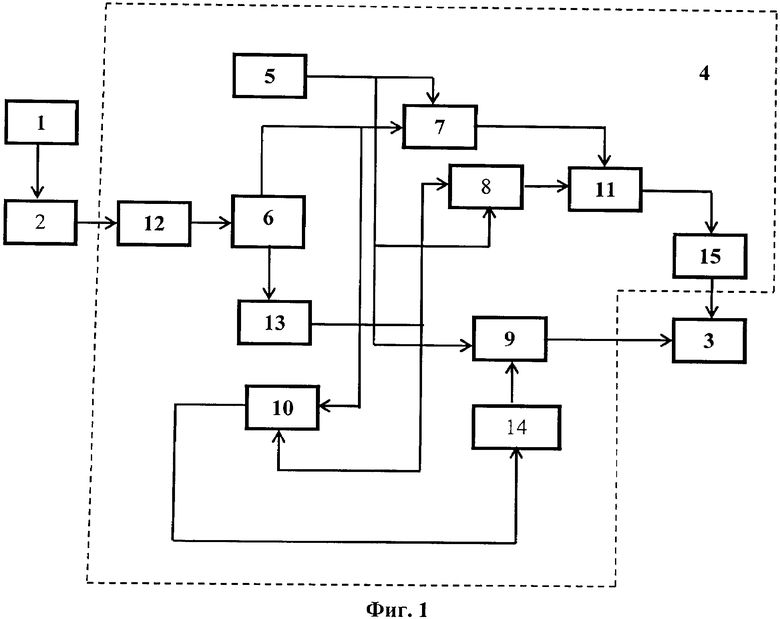
На фиг.1 приведена функциональная схема устройства обработки радиолокационных сигналов, где
1 - радиолокационный приемник; 2 - амплитудный селектор; 3 - индикатор; 4 - блок обработки; 5 - генератор импульсов; 6 - определитель полярности; 7, 8, 9 - элементы И; 10 - элемент ИЛИ; 11 - реверсивный счетчик; 12 - дифференцирующее устройство; 13 - инвертор; 14 - сдвиговый регистр; 15 - дешифратор.
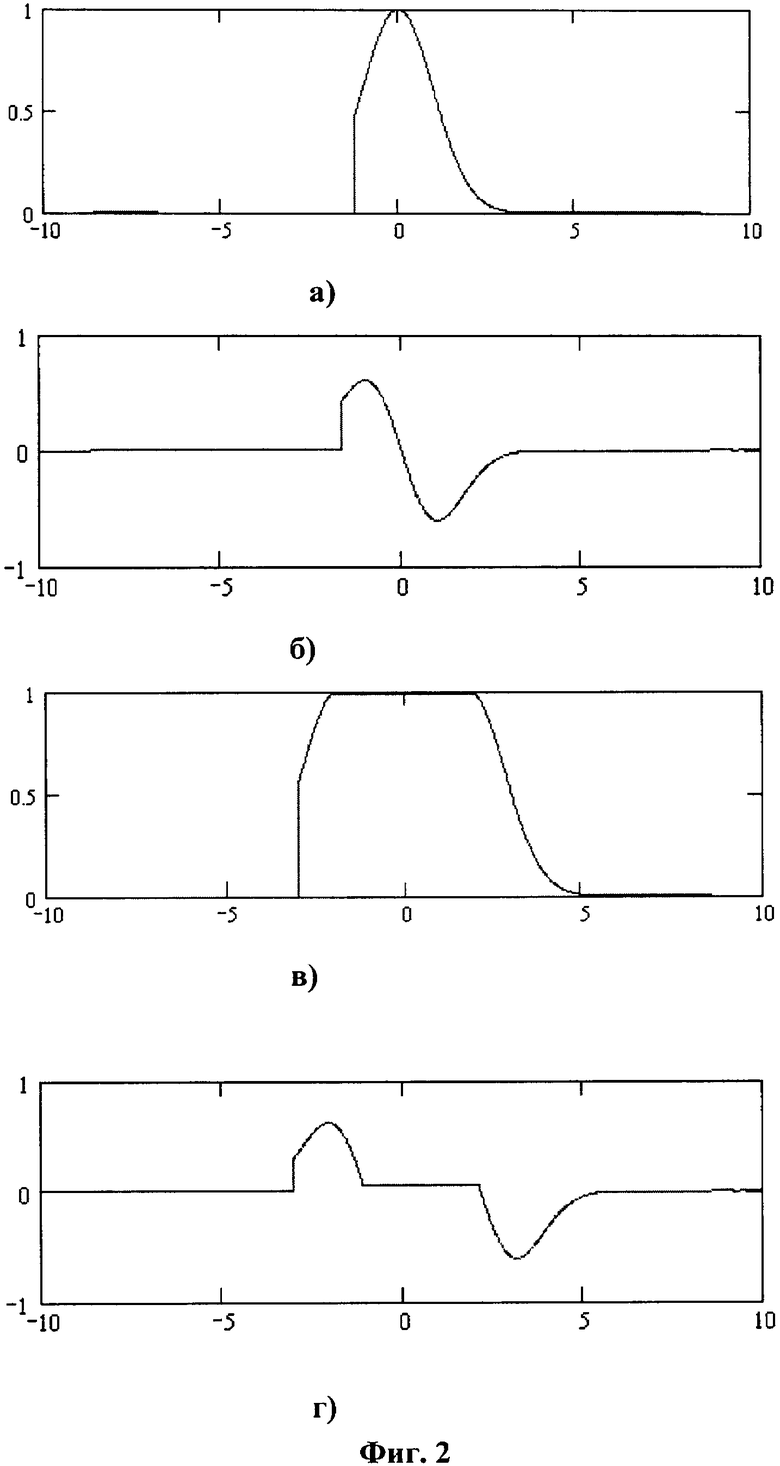
На фиг.2 приведены виды сигналов с выходов амплитудного селектора при точечной цели (фиг.2а); протяженной цели (фиг.2в) и дифференцирующего устройства при точечной цели (фиг.2б) и протяженной цели (фиг.2г)
Устройство обработки радиолокационных сигналов содержит радиолокационный приемник 1, амплитудный селектор 2, индикатор 3 и блок 4 обработки, причем выход радиолокационного приемника 1 соединен с входом амплитудного селектора 2, а блок 4 обработки содержит генератор 5 импульсов, определитель 6 полярности, первый 7, второй 8 и третий 9 элементы И, элемент 10 ИЛИ, реверсивный счетчик 11, дифференцирующее устройство 12, инвертор 13, сдвиговый регистр 14 и дешифратор 15, причем выходы дешифратора 15 и третьего 9 элемента И соединены с входами индикатора 3, выход генератора 5 импульсов соединен с первыми входами соответственно первого 7, второго 8 и третьего 9 элементов И, вторые входы которых соединены соответственно с первым выходом определителя 6 полярности, выходом инвертора 13 и вторым выходом сдвигового регистра 14, выход амплитудного селектора 2 соединен с входом блока 4 обработки, вход дифференцирующего устройства 12 соединен с входом блока 4 обработки, а выход с входом определителя 6 полярности, второй выход которого соединен с входом инвертора 13, выход которого соединен с вторым входом элемента 10 ИЛИ, второй вход которого соединен с первым выходом определителя 6 полярности, а выход - с входом сдвигового регистра 14, выход первого 7 элемента И соединен с прямым входом реверсивного счетчика 11, реверсивный вход которого соединен с выходом второго 8 элемента И, а выход - с входом дешифратора 15.
Принцип функционирования устройства обработки радиолокационных сигналов заключается в следующем. Радиолокационный приемник 1 осуществляет преобразование отраженной электромагнитной энергии в электрические сигналы в процессе кругового обзора и осуществляет выделение сигналов, характеристики которых соответствуют ожидаемому объекту, например движущемуся самолету. Амплитудный селектор 2 выделяет сигнал по амплитуде, которая превышает амплитуду шумов и местных предметов. Вид сигналов на выходе амплитудного селектора при наличии точечного или протяженного объекта приведен соответственно на фиг.2а и 2в. Выделенные сигналы поступают в блок 4 обработки, где поступают на вход дифференцирующего устройства 12. Результатом дифференцирования сигнала является получение двух сигналов, полярности которых соответствует нарастанию и спаду входного сигнала, а длительности пропорциональны временам нарастания и спада входного сигнала. На фиг.2б и 2г представлены графики указанных сигналов при наличии точечного и протяженного объекта.
Определитель 6 полярности осуществляет раздельное формирование на своих выходах положительных и отрицательных сигналов. Сигнал положительной полярности с первого выхода определителя 6 полярности поступает на первый вход первого 7 элемента И, на второй вход которого поступают сигналы с выхода генератора 5 импульсов. На выходе первого 7 элемента И формируется последовательность импульсов, пропорциональная времени нарастания входного сигнала, которая поступает на прямой вход реверсивного счетчика 11. Реверсивный счетчик 11 осуществляет подсчет импульсов данной последовательности. Сигнал отрицательной полярности, формируемый на втором выходе определителя 6 полярности, поступает на первый вход второго 8 элемента И через инвертор 13. На второй вход второго 8 элемента И поступают сигналы с выхода генератора 5 импульсов. На выходе второго 8 элемента И формируется последовательность импульсов, пропорциональная времени спада входного сигнала, которая поступает на реверсивный вход реверсивного счетчика 11. На выходе реверсивного счетчика 11 формируется код, пропорциональный разности длительностей нарастания и спада входного сигнала. Данный код пропорционален дальности до объекта и поступает через дешифратор 13 на индикатор 3.
Измерение угловой координаты объекта происходит следующим образом. Сигнал положительной полярности с первого выхода определителя 6 полярности поступает на первый вход элемента 10 ИЛИ, с выхода которого поступает на вход сдвигового регистра 14. На первом выходе которого формируется сигнал, разрешающий прохождение сигналов генератора 5 импульсов через третий 9 элемент И на вход индикатора 4. Сигналом с выхода инвертора 13, через элемент 10 ИЛИ на вход сдвигового регистра 14, прекращается формирование сигнала на его первом выходе. Тем самым прекращается поступление импульсов с выхода третьего 9 элемента И на вход индикатора 4. Число данных импульсов пропорционально угловым размерам объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ПРОТЯЖЕННОЙ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2360262C2 |
| ВИБРАЦИОННЫЙ ДАТЧИК | 2007 |
|
RU2338165C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ МЕТАЕМОГО ТЕЛА | 2008 |
|
RU2359274C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2298204C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПОРЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 2011 |
|
RU2472177C1 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 1992 |
|
RU2069308C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2407662C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ МЕТАЕМОГО ТЕЛА | 2009 |
|
RU2407019C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ПРОТЯЖЕННОЙ ПО УГЛОВОЙ КООРДИНАТЕ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410714C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ, ПРИНАДЛЕЖАЩИХ ОДНОЙ ЦЕЛИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410715C2 |
Изобретение может быть использовано в системах поиска объектов. Достигаемым техническим результатом является упрощение схемы устройства и расширение функциональных возможностей за счет измерения угловой координаты и дальности как точечных, так и протяженных объектов. Устройство обработки радиолокационных сигналов содержит радиолокационный приемник, амплитудный селектор, индикатор и блок обработки, причем выход радиолокационного приемника соединен с входом амплитудного селектора, а блок обработки содержит генератор импульсов, определитель полярности, первый, второй и третий элементы И, элемент ИЛИ, реверсивный счетчик, дифференцирующее устройство, инвертор, сдвиговый регистр и дешифратор, причем выходы дешифратора и третьего элемента И соединены с входами индикатора, выход генератора импульсов соединен с первыми входами соответственно первого, второго и третьего элементов И, вторые входы которых соединены соответственно с первым выходом определителя полярности, выходом инвертора и вторым выходом сдвигового регистра, выход амплитудного селектора соединен с входом блока обработки, вход дифференцирующего устройства соединен с входом блока обработки, а выход с входом определителя полярности, второй выход которого соединен с входом инвертора, выход которого соединен с вторым входом элемента ИЛИ, второй вход которого соединен с первым выходом определителя полярности, а выход, с входом сдвигового регистра, выход первого элемента И соединен с прямым входом реверсивного счетчика, реверсивный вход которого соединен с выходом второго элемента И, а выход с входом дешифратора. 2 ил.
Устройство обработки радиолокационных сигналов, содержащее радиолокационный приемник, амплитудный селектор и индикатор, причем выход радиолокационного приемника соединен с входом амплитудного селектора, отличающееся тем, что введен блок обработки, содержащий генератор импульсов, определитель полярности, первый, второй и третий элементы И, элемент ИЛИ, реверсивный счетчик, дифференцирующее устройство, инвертор, сдвиговый регистр и дешифратор, причем выходы дешифратора и третьего элемента И соединены с входами индикатора, выход генератора импульсов соединен с первыми входами соответственно первого, второго и третьего элементов И, вторые входы которых соединены соответственно с первым выходом определителя полярности, выходом инвертора и вторым выходом сдвигового регистра, выход амплитудного селектора соединен с входом блока обработки, вход дифференцирующего устройства соединен с входом блока обработки, а выход - с входом определителя полярности, второй выход которого соединен с входом инвертора, выход которого соединен с вторым входом элемента ИЛИ, второй вход которого соединен с первым выходом определителя полярности, а выход - с входом сдвигового регистра, выход первого элемента И соединен с прямым входом реверсивного счетчика, реверсивный вход которого соединен с выходом второго элемента И, а выход - с входом дешифратора.
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1996 |
|
RU2096798C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| РАДИОЛОКАТОР | 2000 |
|
RU2178185C2 |
| Способ разрешения импульсных сигналов | 1977 |
|
SU697939A1 |
| EP 1912080 A2, 16.04.2008 | |||
| KR 20070097128 A, 02.10.2007 | |||
| US 2005179582 A1, 18.08.2005 | |||
| US 5793309 A, 11.08.1998. | |||

