Изобретение относится к области радиолокации и может быть использовано в системах поиска объектов.
Известно устройство обработки радиолокационных сигналов [1, с. 260 - 265] В нем с помощью радиолокационного приемника осуществляется преобразование в электрические сигналы отраженной от объекта электромагнитной энергии. Далее эти сигналы выделяется над уровнем в амплитудном селекторе. Направление определяется по максимуму огибающей сигналов и отображается на индикаторе. Однако устройство не способно определять дальность, если зондирующие сигналы непрерывны или следуют с увеличенной частотой.
Известно устройство обработки радиолокационных сигналов (1, с. 383] В нем процесс кругового обзора осуществляется преобразованием отраженной электромагнитной энергии в электрические сигналы с помощью радиолокационного приемника. Далее эти сигналы выделяются по амплитуде над уровнем шумов в амплитудном селекторе, и поступают в блок анализа огибающей сигналов, определяющий методом максимума направление, которое отображается на индикаторе. Однако устройство не способно определить дальность, если зондирующие сигналы одночастотны, непрерывны или следуют с увеличенной частотой.
С помощью предлагаемого устройства определяется дальность, если одночастотные зондирующие сигналы непрерывны или следуют с увеличенной частотой. Достигается это введением блока счета времени нарастания и спада огибающей и вычитателя следующих друг за другом кодов, при этом выход блока анализатора огибающей соединен с входом блока счет времени нарастания и спада огибающей, групповой выход которого соединен с групповым входом вычитателя следующих друг за другом кодов, имеющего групповой выход, соединенный с групповым входом индикатора.
На фиг. 1 и в тексте приняты следующие обозначения: 1 радиолокационный приемник; 2 амплитудный селектор; 3 блок анализа огибающей; 4 блок счета времени нарастания и спада огибающей; 5 вычитатель следующих друг за другом кодов; 6 индикатор.
При этом выход радиолокационного приемника через амплитудный селектор 2, блок анализатора огибающей 3 соединен с входом блока счета времени нарастания и спада огибающей 4 и с первым входом индикатора 6, групповой вход которого соединен с групповым выходом вычитателя следующих друг за другом кодов 5, имеющего групповой вход, соединенный с групповым выходом блока счета времени нарастания и спада огибающей 4.
Работа устройства осуществляется следующим образом.
Радиолокационный приемник 1 осуществляет преобразование отраженной электромагнитной энергии в электрические сигналы в процессе кругового обзора и осуществляет выделение сигналов, характеристики которых соответствуют ожидаемому объекту, например движущемуся самолету. Амплитудный селектор 2 выделяет сигнал по амплитуде, которая превышает амплитуду шумов и местных предметов. Выделенные сигналы поступают в блок анализа огибающей 3, который выделяет огибающую сигналов и выдает сигналы в моменты начала и конца огибающей 4 в момент ее максимальной амплитуды в блок счета времени нарастания и спада огибающей 4. Кроме того, сигнал в момент максимума амплитуды огибающей поступает в индикатор 6 для отображения направления.
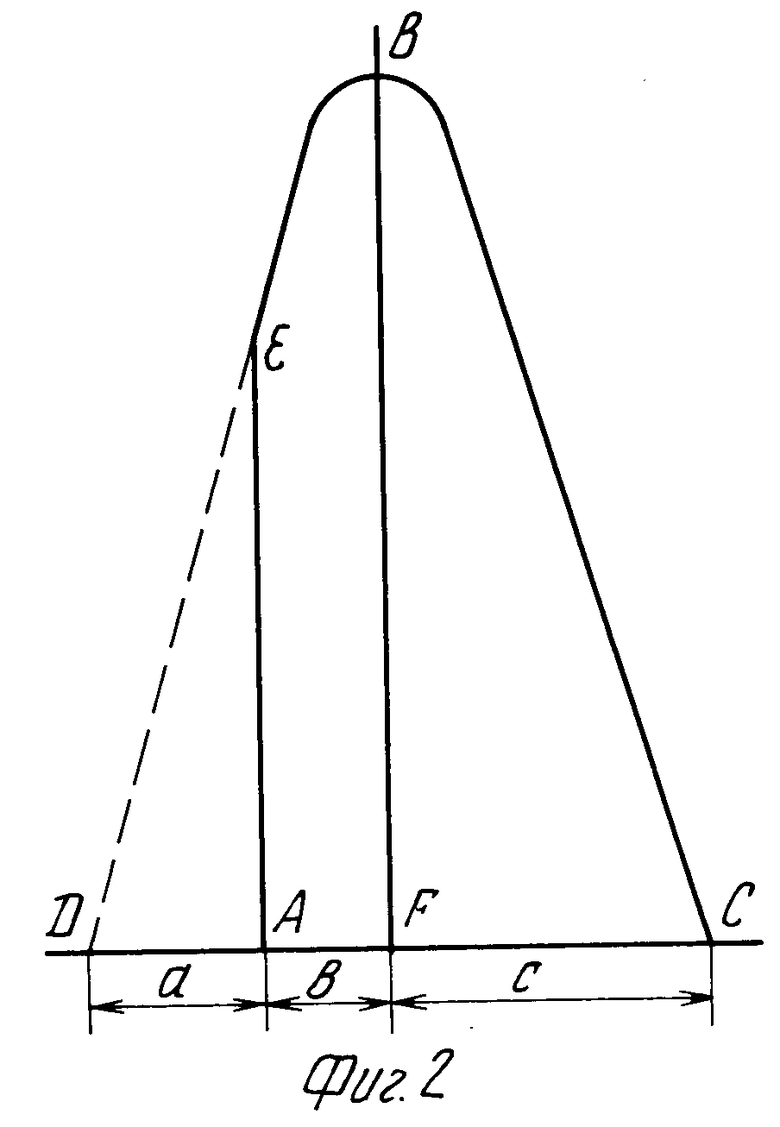
На фиг. 2 представлена форма огибающей. Кривая AB характеризует нарастание огибающей, а кривая BC ее спад. Так как диаграмма направленности вращается в режиме кругового обзора, то за время запаздывания отраженного от объекта сигнала, она повернется на некоторый угол. Поэтому форма огибающей будет выражена не кривой DBC, а кривой ABC, а разность отрезков a b d характеризует дальность до объекта, облучаемого зондирующими сигналами. Следовательно, разность между временами спада и нарастания огибающей представляет собой информацию о дальности. Если бы дальность была равна нулю, то форма огибающей соответствовала бы кривой DBC (кривая DE показана пунктиром). Таким образом, независимо от ширины диаграммы направленности для одних и тех же дальностей значение d будет постоянно. Следовательно, можно сделать вывод, что разность между временами спада и нарастания огибающей не зависит от ширины диаграммы направленности, а зависит только от скорости ее вращения и от дальности. Скорость вращения диаграммы направленности должна быть такова, чтобы значение d a было больше нуля, чтобы выполнялось условие b > о.
Абсолютное значение между временами спада и нарастания огибающей определяется в вычитателе следующих друг за другом кодов 5, которые последовательно поступают с блока счета времени нарастания и спада огибающей 4, определяющего временное рассогласование между двумя сигналами, а именно между началом огибающей и ее максимумом, а затем между максимумом и концом огибающей. Работа блока 4 аналогична работе преобразователя дальности.
С выхода вычитателя следующих друг за другом кодов 5 значение разности, прямо пропорциональное дальности, поступает в индикатор 6 для отображения. Приведем пример конкретного выполнения. Пусть диаграмма направленности вращается со скоростью 60 об/мин. Тогда при ширине ее 1o в месте нахождения объекта, время пересечения объекта будет составлять 2,8 мс. Выполняя вышеупомянутое условие, (b > 0) максимальная дальность обнаружения не должна превышать 200 км. Если учесть, что вблизи вращающейся антенны нет мешающих предметов, искажающих диаграмму направленности, то точность определения максимума огибающей может составить 1 мин, что обеспечивает точность определения дальности 500 м.
Устройство можно применить в радиолокаторах для целей увеличения дальности обнаружения в процессе поиска воздушных объектов, в том числе и в бортовых, корабельных, передвижных и переносных средствах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1997 |
|
RU2115139C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2009 |
|
RU2413241C1 |
| РАДИОЛОКАТОР | 2008 |
|
RU2366970C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 2010 |
|
RU2421749C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2028644C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2088950C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2247408C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2279690C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 1996 |
|
RU2118835C1 |
Устройство обработки радиолокационных сигналов, определяющее дальность при одночастотных непрерывных зондирующих сигналах и сигналах, следующих с увеличенной частотой благодаря введению блока счета времени нарастания и спада огибающей и вычитателя следующих друг за другом кодов, при этом выход блока анализатора огибающей, групповой выход которого соединен с групповым входом вычитателя следующих друг за другом кодов, имеющего групповой выход, соединенный с групповым входом индикатора. 2 ил.
Устройство обработки радиолокационных сигналов, состоящее из радиолокационного приемника, амплитудного селектора, блока анализа огибающей и индикатора, где выход радиолокационного приемника через амплитудный селектор, через блок анализа огибающей соединен с входом индикатора, отличающееся тем, что вводится блок счета времени нарастания и спада огибающей и вычитатель следующих друг за другом кодов, при этом выход блока анализа огибающей соединен с входом блока счета времени нарастания и спада огибающей, групповой выход которого соединен с групповым входом вычитателя следующих друг за другом кодов, имеющих групповой выход, соединенный с групповым входом индикатора.
| Гришин Ю.П | |||
| Ипатов В.П., Казаринов Ю.М | |||
| и др | |||
| /Под ред | |||
| Ю.М.Казиринова | |||
| Радиотехнические системы | |||
| - М.: Высшая школа, 1990, с | |||
| Прибор для периодического прерывания электрической цепи в случае ее перегрузки | 1921 |
|
SU260A1 |
