Притязание на приоритет по §119 35 U.S.C
Данная заявка испрашивает приоритет предварительной патентной заявки США № 60/499,951 под названием "Способ начальной синхронизации в беспроводной системе группового вещания с использованием мультиплексированных с временным разделением символов пилот-сигналов" от 2 сентября 2003 г.
I. Область техники
Настоящее изобретение относится в общем к передаче данных, и более конкретно, к синхронизации в беспроводной широковещательной системе, использующей мультиплексирование с ортогональным частотным разделением каналов (МОЧРК).
II. Уровень техники
МОЧРК представляет собой метод модуляции нескольких несущих, который эффективно разбивает всю ширины полосы пропускания системы на множество (N) ортогональных частотных поддиапазонов. Эти поддиапазоны также упоминаются как тоны, поднесущие, элементы разрешения и частотные каналы. С МОЧРК, каждый поддиапазон связывается с соответствующей поднесущей, которая может быть модулирована данными.
В системе МОЧРК передатчик обрабатывает данные для получения модуляционных символов и дополнительно выполняет модуляцию МОЧРК на модуляционных символах, чтобы формировать символы МОЧРК, как описано ниже. Затем передатчик приводит в определенное состояние и передает символы МОЧРК через канал связи. Система МОЧРК может использовать структуру передачи, посредством которой данные передаются в кадрах, с каждым кадром, имеющим конкретную продолжительность времени. Различные типы данных (например, данные информационного обмена/пакетированные данные, служебная информация/данные управления, пилот-сигнал и так далее) могут посылаться в различных частях каждого кадра. Термин "пилот-сигнал" в общем относится к данным и/или передаче, которые известны a priori и передатчику, и приемнику.
Приемник обычно должен получать точное согласование по времени кадров и символов, чтобы должным образом восстанавливать данные, посылаемые передатчиком. Например, приемнику может быть необходимо знать начало каждого кадра, чтобы должным образом восстанавливать различные типы данных, посылаемых в кадре. Приемнику часто не известно ни время, в которое каждый символ МОЧРК посылается передатчиком, ни задержка распространения, вносимая каналом связи. Тогда приемнику необходимо устанавливать согласование по времени каждого символа МОЧРК, принимаемого через канал связи, чтобы должным образом выполнять комплементарную демодуляцию МОЧРК на принятом символе МОЧРК.
Синхронизация относится к процессу, выполняемому приемником для получения согласования по времени кадров и символов. Приемник также может выполнять другие задачи, такие как оценка погрешности частоты, в качестве части синхронизации. Передатчик обычно расходует системные ресурсы для поддержания синхронизации, и приемник также потребляет ресурсы для выполнения синхронизации. Поскольку синхронизация представляет собой непроизводительные издержки, необходимые для передачи данных, желательно сократить до минимума количество ресурсов, используемых для синхронизации как передатчиком, так и приемником.
Поэтому в технике имеется потребность в методах эффективного достижения синхронизации в широковещательной системе МОЧРК.
Сущность изобретения
В данном описании представлены методы достижения синхронизации с использованием мультиплексированных c временным разделением (МПВР) пилот-сигналов в системе МОЧРК. В каждом кадре (например, в начале кадра), передатчик осуществляет широковещательную передачу или передает первый пилот-сигнал МПВР в первом наборе поддиапазонов, сопровождаемый вторым пилот-сигналом МПВР во втором наборе поддиапазонов. Первый набор содержит L1 поддиапазонов, а второй набор содержит L2 поддиапазонов, где каждый из L1 и L2 является частью N суммарных поддиапазонов, и L2>L1. Поддиапазоны в каждом наборе могут быть равномерно распределены по всем N суммарным поддиапазонам так, что (1) L1 поддиапазонов в первом наборе равномерно разнесены друг от друга S1=N/L1 поддиапазонами, и (2) L2 поддиапазонов во втором наборе равномерно разнесены друг от друга S2=N/L2 поддиапазонами. Эта структура пилот-сигналов приводит к (1) символу МОЧРК для первого пилот-сигнала пилот-сигнала МПВР, содержащему по меньшей мере S1 идентичных последовательностей "пилот-сигнала-1", с каждой последовательностью пилот-сигнала-1, содержащей L1 выборок временной области, и (2) символу МОЧРК для второго пилот-сигнала пилот-сигнала МПВР, содержащему по меньшей мере S2 идентичных последовательностей "пилот-сигнала-2", с каждой последовательностью пилот-сигнала-2, содержащей L2 выборок временной области. Передатчик также может передавать мультиплексированный c частотным разделением (МПЧР) пилот-сигнал наряду с данными в остающейся части каждого кадра. Эта структура пилот-сигнала пилот-сигнала с двумя контрольными сигналами МПВР хорошо подходит для широковещательной системы, но также может использоваться для нешироковещательных систем.
Приемник может выполнять синхронизацию, основываясь на первом и втором контрольных сигналах МПВР. Приемник может обрабатывать первый пилот-сигнал МПВР для получения согласования по времени кадров и оценки погрешности частоты. Приемник может вычислять показатель выявления на основании задержанной корреляции между различными последовательностями пилот-сигнала-1 для первого пилот-сигнала пилот-сигнала МПВР, сравнивать показатель выявления с пороговым значением и объявлять выявление первого пилот-сигнала пилот-сигнала МПВР (и таким образом, кадра) на основании результата сравнения. Приемник также может получать оценку погрешности частоты в принимаемом символе МОЧРК на основании последовательностей пилот-сигнала-1. Приемник может обрабатывать второй пилот-сигнал МПВР для получения согласования по времени символов и оценки канала. Приемник может выводить оценку импульсной характеристики канала, основываясь на принимаемом символе МОЧРК для второго пилот-сигнала пилот-сигнала МПВР, выявлять начало оценки импульсной характеристики канала (например, на основании энергии отводов канала для импульсной характеристики канала) и выводить согласование по времени символов на основании выявленного начала оценки импульсной характеристики канала. Приемник также может выводить оценку частотной характеристики канала для N суммарных поддиапазонов, основанную на оценке импульсной характеристики канала. Приемник может использовать первый и второй пилот-сигналы МПВР для начальной синхронизации и может использовать пилот-сигнал МПЧР для отслеживания частоты и времени и для более точной оценки канала.
Ниже более подробно описаны различные аспекты и варианты осуществления изобретения.
Краткое описание чертежей
Признаки и характер настоящего изобретения станут более очевидными из сформулированного ниже подробного описания, приведенного в связи с чертежами, на которых подобные ссылочные позиции представлены, соответственно, повсюду, и на которых:
фиг. 1 изображает базовую станцию и беспроводное устройство в системе МОЧРК;
фиг. 2 изображает структуру суперкадра для системы МОЧРК;
фиг. 3A и 3B изображают представления частотных областей пилот-сигналов 1 и 2 МПВР, соответственно;
фиг. 4 изображает процессор передаваемых (ПРД) данных и контрольных сигналов;
фиг. 5 изображает модулятор МОЧРК;
фиг. 6A и 6B изображают представления временных областей пилот-сигналов 1 и 2 МПВР;
фиг. 7 изображает модуль синхронизации и оценки канала;
фиг. 8 изображает устройство выявления кадров;
фиг. 9 изображает устройство выявления согласования по времени символов;
фиг. 10A-10C изображают обработку для символа МОЧРК пилот-сигнала пилот-сигнала 2; и
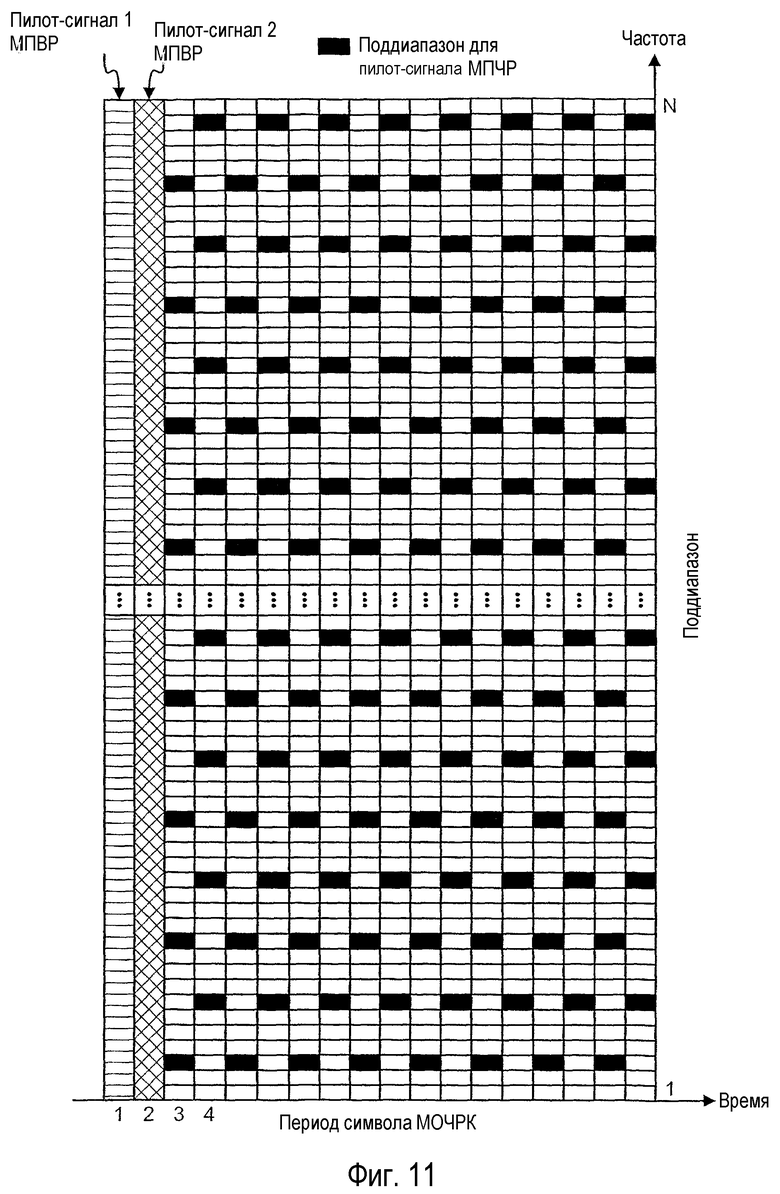
фиг. 11 изображает схему передачи пилот-сигналов с контрольными сигналами МПЧР и МПВР.
Подробное описание
Термин "примерный" используется в данном описании для обозначения "служащий в качестве примера, образца или иллюстрации". Любой вариант осуществления или проектное решение, описанные здесь как "примерные", не обязательно должны рассматриваться в качестве предпочтительных или выгодных по сравнению с другими вариантами осуществления или проектными решениями.
Описанные в данном описании способы синхронизации можно использовать для различных систем с несколькими несущими как для нисходящей линии связи, так и для восходящей линии связи. Термин "нисходящая линия связи" (или "прямая линия связи") относится к линии связи от базовых станций к беспроводным устройствам, а термин "восходящая линия связи" (или "обратная линия связи") относится к линии связи от беспроводных устройств к базовым станциям. Для ясности, эти методы описаны ниже для нисходящей линии связи в системе МОЧРК.
Фиг. 1 изображает блок-схему базовой станции 110 и беспроводного устройства 150 в системе 100 МОЧРК. Базовая станция 110 представляет собой в общем фиксированную станцию и также может упоминаться как основная система приемопередатчиков (ОСП), точка доступа или может использоваться некоторая другая терминология. Беспроводное устройство 150 может быть стационарным или мобильным и также может упоминаться как пользовательский терминал, подвижная станция или может использоваться некоторая другая терминология. Беспроводным устройством 150 также может быть переносное устройство, такое как сотовый телефон, карманное устройство, беспроводный модуль, персональный цифровой ассистент (ПЦА) и так далее.
На базовой станции 110, процессор 120 ПРД данных и пилот-сигналов принимает различные типы данных (например, данные информационного обмена/пакетированные данные и служебную информацию/данные управления) и обрабатывает (например, кодирует, перемежает и посимвольно отображает) принимаемые данные, чтобы формировать символы данных. Как используется в данном описании, термин "символ данных" представляет собой модуляционный символ для данных, "символ контрольного сигнала" представляет собой модуляционный символ для контрольного сигнала, а модуляционный символ является комплексной величиной для точки в совокупности сигналов для модуляционной схемы (например, М-PSK (многоуровневой фазовой манипуляции), М-QAM (многоуровневой квадратурной амплитудной модуляции), и так далее). Процессор 120 также обрабатывает данные контрольных сигналов, чтобы формировать символы контрольных сигналов, и передает символы данных и пилот-сигналов на модулятор 130 МОЧРК.
Модулятор 130 МОЧРК мультиплексирует символы данных и пилот-сигналов на надлежащие поддиапазоны и периоды символов и дополнительно выполняет модуляцию МОЧРК на мультиплексированных символах, чтобы формировать символы МОЧРК, как описано ниже. Модуль передатчика (TMTR) 132 преобразовывает символы МОЧРК в один или более аналоговые сигналы и дополнительно приводит в определенное состояние (например, усиливает, фильтрует и преобразовывает с повышением частоты) аналоговый сигнал (сигналы), чтобы формировать модулированный сигнал. Затем базовая станция 110 передает модулированный сигнал от антенны 134 на беспроводные устройства в системе.
В беспроводном устройстве 150 передаваемый от базовой станции 110 сигнал принимается антенной 152 и передается в модуль приемника (RCVR) 154. Модуль 154 приемника приводит в определенное состояние (например, фильтрует, усиливает и преобразовывает с понижением частоты) принимаемый сигнал и оцифровывает приведенный в определенное состояние сигнал для получения потока входных выборок. Демодулятор 160 МОЧРК выполняет демодуляцию МОЧРК на входных выборках для получения принимаемых символов данных и контрольных сигналов. Демодулятор 160 МОЧРК также выполняет выявление (например, согласованное фильтрование) на принимаемых символах данных с оценкой канала (например, оценкой частотной характеристики), для получения выявленных символов данных, которые являются оценками символов данных, посылаемых базовой станцией 110. Демодулятор 160 МОЧРК передает выявленные символы данных в процессор 170 принимаемых (ПРМ) данных.
Модуль 180 синхронизации/оценки канала принимает входные выборки от модуля 154 приемника и выполняет синхронизацию для определения согласования по времени кадров и символов, как описано ниже. Модуль 180 также выводит оценку канала, используя принятые символы пилот-сигналов от демодулятора 160 МОЧРК. Модуль 180 обеспечивает согласование по времени символов и оценку канала для демодулятора 160 МОЧРК и может обеспечивать согласование по времени кадров для процессора 170 ПРМ данных и/или контроллера 190. Демодулятор 160 МОЧРК использует согласование по времени символов для выполнения демодуляции МОЧРК и использует оценку канала для выполнения выявления на принимаемых символах данных.
Процессор 170 ПРМ данных обрабатывает (например, восстанавливает символы, выполняет обратное перемежение и декодируют) выявленные символы данных от демодулятора 160 МОЧРК и обеспечивает декодированные данные. Процессор 170 ПРМ данных и/или контроллер 190 может использовать согласование по времени кадров для восстановления различных типов данных, посылаемых базовой станцией 110. В общем, обработка демодулятором 160 МОЧРК и процессором 170 ПРМ данных является комплементарной к обработке модулятором 130 МОЧРК и процессором 120 ПРД данных и контрольных сигналов, соответственно, на базовой станции 110.
Контроллеры 140 и 190 управляют работой на базовой станции 110 и в беспроводном устройстве 150, соответственно. Запоминающие устройства 142 и 192 обеспечивают хранение для кодов программы и данных, используемых контроллерами 140 и 190, соответственно.
Базовая станция 110 может выполнять передачу данных по двухточечной линии для одного беспроводного устройства, передачу группового вещания для группы беспроводных устройств, широковещательную передачу для всех беспроводных устройств, находящихся в ее зоне обслуживания, или любую их комбинацию. Например, базовая станция 110 может осуществлять широковещательную передачу пилот-сигнала пилот-сигнала и служебной информации/данных управления для всех беспроводных устройств, находящихся в ее зоне обслуживания. Базовая станция 110 дополнительно может передавать определенные для пользователя данные на определенные беспроводные устройства, данные группового вещания для группы беспроводных устройств и/или осуществлять широковещательную передачу данных для всех беспроводных устройств.
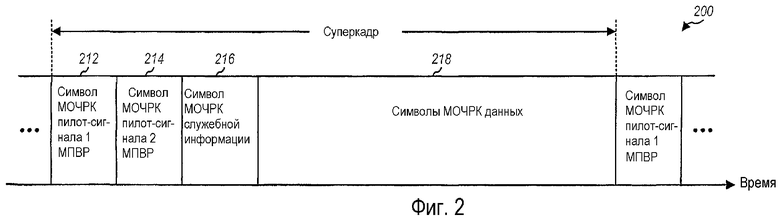
Фиг. 2 изображает структуру 200 суперкадра, которая может использоваться для системы 100 МОЧРК. Данные и пилот-сигнал могут передаваться в суперкадрах, где каждый суперкадр имеет предварительно определенную продолжительность времени. Суперкадр также может упоминаться как кадр, временной интервал или может использоваться некоторая другая терминология. Для варианта осуществления, показанного на фиг. 2, каждый суперкадр включает в себя поле 212 для первого пилот-сигнала пилот-сигнала МПВР (или "пилот-сигнал 1 МПВР"), поле 214 для второго пилот-сигнала пилот-сигнала МПВР (или "пилот-сигнал 2 МПВР"), поле 216 для служебной информации/данных управления и поле 218 для данных информационного обмена/пакетированных данных.
Эти четыре поля 212-218 являются мультиплексированными с временным разделением в каждом суперкадре так, что в любой данный момент передается только одно поле. Эти четыре поля также размещены в порядке, показанном на фиг. 2, чтобы облегчить синхронизацию и восстановление данных. Символы МОЧРК пилот-сигналов в полях 212 и 214, которые передаются сначала в каждом суперкадре, могут использоваться для выявления символов МОЧРК служебной информации в поле 216, которое передается в суперкадре следующим. Служебная информация, получаемая из поля 216, может затем использоваться для восстановления данных информационного обмена/пакетированных данных, посылаемых в поле 218, которое передается в суперкадре последним.
В варианте осуществления, поле 212 несет один символ МОЧРК для пилот-сигнала пилот-сигнала 1 МПВР, а поле 214 также несет один символ МОЧРК для пилот-сигнала пилот-сигнала 2 МПВР. В общем, каждое поле может иметь любую длину, и поля могут быть размещены в любом порядке. Пилот-сигналы 1 и 2 МПВР периодически передаются широковещательной рассылкой в каждом кадре, чтобы облегчать синхронизацию, производимую беспроводными устройствами. Поле 216 служебной информации и/или поле 218 данных также могут содержать символы контрольных сигналов, которые мультиплексированы с частотным разделением с символами данных, как описано ниже.
Система МОЧРК имеет суммарную ширину полосы пропускания системы, составляющую BW МГц, которая разбита на N ортогональных поддиапазонов с использованием МОЧРК. Разнесение между смежными поддиапазонами составляет BW/N МГц. Из N суммарных поддиапазонов М поддиапазонов могут использоваться для передачи пилот-сигналов и данных, где М<N, а остальные N-М поддиапазонов могут быть неиспользованными и служить в качестве защитных поддиапазонов. В варианте осуществления, система МОЧРК использует структуру МОЧРК с N=4096 суммарных поддиапазонов, М=4000 используемых поддиапазонов и N-М=96 защитных поддиапазонов. В общем, для системы МОЧРК можно использовать любую структуру МОЧРК с любым количеством суммарных, используемых и защитных поддиапазонов.
Пилот-сигналы МПВР 1 и 2 могут быть спроектированы так, чтобы облегчать синхронизацию, выполняемую беспроводными устройствами в системе. Беспроводное устройство может использовать пилот-сигнал 1 МПВР для выявления начала каждого кадра, получения грубой оценки согласования по времени символов и оценки погрешности частоты. Беспроводное устройство может использовать пилот-сигнал 2 МПВР для получения более точного согласования по времени символов.
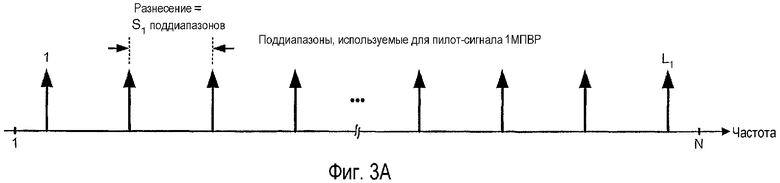
Фиг. 3A изображает вариант осуществления пилот-сигнала пилот-сигнала 1 МПВР в частотной области. Для этого варианта осуществления пилот-сигнал 1 МПВР содержит L1 символов контрольных сигналов, которые передаются по L1 поддиапазонам, один символ пилот-сигнала пилот-сигнала на поддиапазон, используемый для пилот-сигнала пилот-сигнала 1 МПВР. L1 поддиапазонов равномерно распределены по N суммарным поддиапазонам и равномерно разнесены друг от друга S1 поддиапазонами, где S1=N/L1. Например, N=4096, L1=128 и S1=32. Однако для N, L1 и S1 также можно использовать другие значения. Эта структура для пилот-сигнала пилот-сигнала 1 МПВР может (1) обеспечивать хорошие рабочие характеристики для выявления кадров в различных типах канала, включая напряженный канал с многолучевым распространением, (2) обеспечивать достаточно точную оценку погрешности частоты и грубое согласование по времени символов в напряженном канале с многолучевым распространением и (3) упрощать обработку в беспроводных устройствах, как описано ниже.
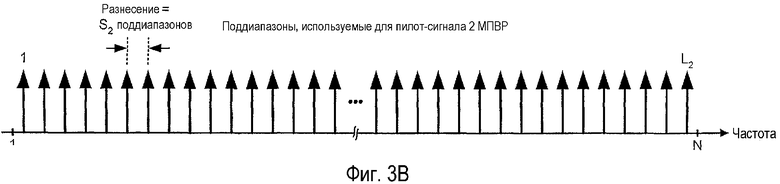
Фиг. 3B изображает вариант осуществления пилот-сигнала пилот-сигнала 2 МПВР в частотной области. Для этого варианта осуществления пилот-сигнал 2 МПВР содержит L2 символов контрольных сигналов, которые передаются по L2 поддиапазонам, где L2>L1. L2 поддиапазонов равномерно распределены по N суммарным поддиапазонам и равномерно разнесены друг от друга S2 поддиапазонами, где S2=N/L2. Например, N=4096, от L2=2048, и S2=2. Снова, для N, L2 и S2 также можно использовать другие значения. Эта структура для пилот-сигнала пилот-сигнала 2 МПВР может обеспечивать точное согласование по времени символов в различных типах канала, включая напряженный канал с многолучевым распространением. Беспроводные устройства также могут быть в состоянии (1) эффективным способом обрабатывать пилот-сигнал 2 МПВР для получения согласования по времени символов до прибытия следующего символа МОЧРК, который находится справа за пилот-сигналом 2 МПВР, и (2) применять согласование по времени символов к этому следующему символу МОЧРК, как описано ниже.
Для L1 используется меньшее значение, чтобы с помощью пилот-сигнала пилот-сигнала МПВР 1 могла быть исправлена большая погрешность частоты. Для L2 используется большее значение, так что последовательность пилот-сигнала-2 является длиннее, что позволяет беспроводному устройству получать оценку более длинной импульсной характеристики канала из последовательности пилот-сигнала-2. L1 поддиапазонов для пилот-сигнала пилот-сигнала 1 МПВР выбираются таким образом, что для пилот-сигнала пилот-сигнала 1 МПВР формируются S1 идентичных последовательностей пилот-сигнала-1. Точно так же, L2 поддиапазонов для пилот-сигнала пилот-сигнала 2 МПВР выбираются таким образом, что для пилот-сигнала пилот-сигнала 2 МПВР формируются S2 идентичных последовательностей пилот-сигнала-2.
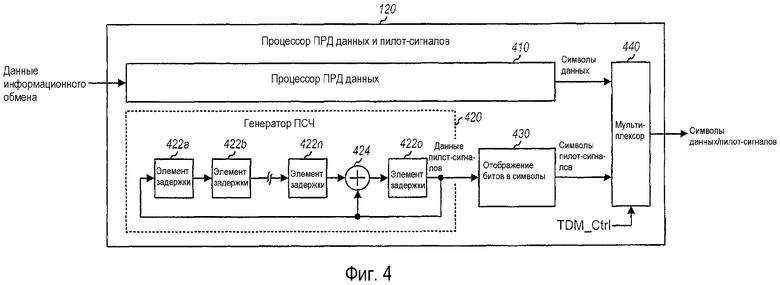
Фиг. 4 изображает блок-схему варианта осуществления процессора 120 ПРД данных и пилот-сигналов на базовой станции 110. В процессоре 120 процессор 410 ПРД данных принимает, кодирует, перемежает и посимвольно отображает данные информационного обмена/пакетированные данные, чтобы формировать символы данных.
В варианте осуществления используется генератор 420 псевдослучайный чисел (ПСЧ), чтобы формировать данные для пилот-сигналов 1 и 2 МПВР. Генератор 420 ПСЧ может быть реализован, например, с помощью 15-отводного линейного сдвигового регистра с обратной связью (LFSR), который реализует порождающий многочлен g(x)=x 15+x 14+1. В этом случае, генератор 420 ПСЧ включает в себя (1) 15 элементов задержки 422a-422o, соединенных последовательно, и (2) блок 424 суммирования, подсоединенный между элементами 422n и 422o задержки. Элемент 422o задержки обеспечивает данные контрольных сигналов, которые также подаются обратно на вход элемента 422a задержки и на один вход блока 424 суммирования. Генератор 420 ПСЧ может быть инициализирован с различными начальными состояниями для пилот-сигналов 1 и 2 МПВР, например, на '011010101001110' для пилот-сигнала пилот-сигнала 1 МПВР и на '010110100011100' для пилот-сигнала пилот-сигнала 2 МПВР. В общем, для пилот-сигналов 1 и 2 МПВР могут использоваться любые данные. Данные пилот-сигналов могут быть выбраны так, чтобы снизить разность между пиковой амплитудой и средней амплитудой символа МОЧРК пилот-сигналов (то есть, сократить до минимума изменение двойной амплитуды в форме колебаний временной области для пилот-сигналов МПВР). Данные пилот-сигналов для пилот-сигнала пилот-сигнала 2 МПВР также могут быть сформированы с помощью того же генератора ПСЧ, который используется для скремблирования данных. Беспроводные устройства должны знать данные, используемые для пилот-сигнала пилот-сигнала 2 МПВР, но не должны знать данные, используемые для пилот-сигнала пилот-сигнала 1 МПВР.
Модуль 430 отображения битов в символы принимает данные пилот-сигналов от генератора 420 ПСЧ и отображает биты данных пилот-сигналов в символы пилот-сигналов на основании модуляционной схемы. Для пилот-сигналов 1 и 2 МПВР могут использоваться одинаковые или разные модуляционные схемы. В варианте осуществления, для обоих пилот-сигналов 1 и 2 МПВР используется КФМП (квадратурная фазовая манипуляция). В этом случае, модуль 430 отображения группирует данные пилот-сигналов в 2-битовые бинарные значения и дополнительно отображает каждое 2-битовое значение в определенный модуляционный символ контрольных сигналов. Каждый символ пилот-сигналов представляет собой комплексную величину в совокупности сигналов для КФМП. Если для пилот-сигналов МПВР используется КФМП, то модуль 430 отображения отображает 2L1 информационных битов пилот-сигналов для пилот-сигнала пилот-сигнала 1 МПВР в L1 символов пилот-сигналов и дополнительно отображает 2L2 информационных битов пилот-сигналов для пилот-сигнала пилот-сигнала 2 МПВР в L2 символов контрольных сигналов. Мультиплексор (Mux) 440 принимает символы данных от процессора 410 ПРД данных, символы пилот-сигналов модуля 430 отображения и сигнал TDM_Ctrl от контроллера 140. Мультиплексор 440 передает в модулятор 130 МОЧРК символы пилот-сигналов для полей пилот-сигналов 1 и 2 МПВР и символы данных для полей служебной информации и данных каждого кадра, как показано на фиг. 2.
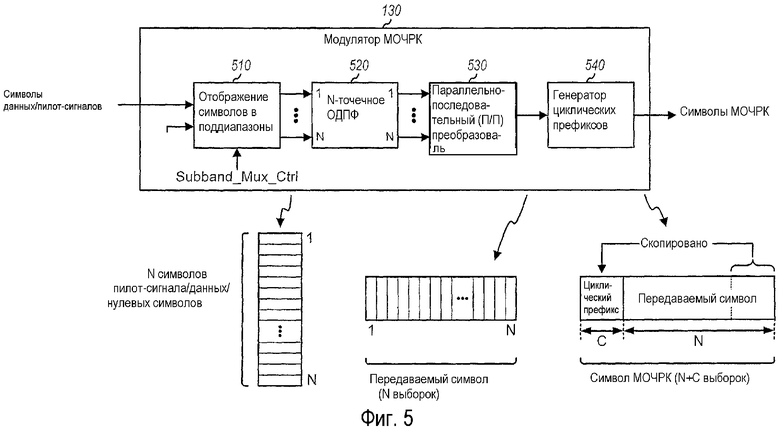
Фиг. 5 изображает блок-схему варианта осуществления модулятора 130 МОЧРК в базовой станции 110. Модуль 510 отображения символов в поддиапазоны принимает символы данных и пилот-сигналов от процессора 120 ПРД данных и пилот-сигналов и отображает эти символы в надлежащие поддиапазоны, основываясь на сигнале Subband_Mux_Ctrl от контроллера 140. В каждом периоде символа МОЧРК модуль 510 отображения обеспечивает один символ данных или пилот-сигнала пилот-сигнала в каждом поддиапазоне, используемом для передачи данных или контрольных сигналов, и "нулевой символ" (который является сигнальным значением нуля) для каждого неиспользуемого поддиапазона. Символы контрольных сигналов, назначаемые для поддиапазонов, которые не используются, заменяются нулевыми символами. В течение каждого периода символа МОЧРК модуль 510 отображения обеспечивает N "передаваемых символов" для N суммарных поддиапазонов, где каждый передаваемый символ может быть символом данных, символом пилот-сигнала пилот-сигнала или нулевым символом. Модуль 520 обратного дискретного преобразования Фурье (ОДПФ) принимает N передаваемых символов в течение каждого периода символа МОЧРК, преобразовывает N передаваемых символов во временную область с N-точечным ОДПФ и обеспечивает "преобразованный" символ, который содержит N выборок временной области. Каждая выборка представляет собой комплексную величину, которая подлежит отправке в течение одного периода выборок. Также вместо N-точечного ОДПФ можно выполнять N-точечное обратное быстрое преобразование Фурье (ОБПФ), если N представляет собой степень двух, что обычно имеет место. Параллельно-последовательный (П/П) преобразователь 530 преобразовывает в последовательную форму N выборок для каждого преобразованного символа. Затем генератор 540 циклических префиксов повторяет часть (или C выборок) каждого преобразованного символа, чтобы формировать символ МОЧРК, который содержит N+C выборок. Циклический префикс используется для борьбы с межсимвольной интерференцией (МСИ) и интерференцией между несущими (ИМН), вызываемой большим разбросом по задержке в канале связи. Разброс по задержке представляет собой разницу во времени между самым ранним событием прихода сигнала и самым поздним событием прихода сигнала в приемнике. Период символа МОЧРК (или просто, "период символа") представляет собой длину одного символа МОЧРК и равен N+C периодам выборок.
Фиг. 6A изображает представление временной области пилот-сигнала пилот-сигнала 1 МПВР. Символ МОЧРК для пилот-сигнала пилот-сигнала 1 МПВР (или "символ МОЧРК пилот-сигнала пилот-сигнала 1") состоит из преобразованного символа длиной N и циклического префикса длиной C. Поскольку L1 символов пилот-сигнала пилот-сигнала для пилот-сигнала пилот-сигнала 1 МПВР посылаются в L2 поддиапазонах, которые равномерно разнесены друг от друга S1 поддиапазонами, и поскольку в остающихся поддиапазонах посылаются нулевые символы, преобразованный символ для пилот-сигнала пилот-сигнала 1 МПВР содержит S1 идентичных последовательностей пилот-сигнала-1, где каждая последовательность пилот-сигнала-1 содержит L1 выборок временной области. Каждая последовательность пилот-сигнала-1 также может быть образована посредством выполнения L1-точечного ОДПФ на L1 символах пилот-сигнала пилот-сигнала для пилот-сигнала пилот-сигнала 1 МПВР. Циклический префикс для пилот-сигнала пилот-сигнала 1 МПВР состоит из C крайних правых выборок преобразованного символа и вставляется перед преобразованным символом. Таким образом, символ МОЧРК пилот-сигнала пилот-сигнала 1 содержит общее количество S1+C/L1 последовательностей пилот-сигнала-1. Например, если N=4096, L1 =128, S1=32 и C=512, то символ МОЧРК пилот-сигнала пилот-сигнала 1 будет содержать 36 последовательностей пилот-сигнала-1, с каждой последовательностью пилот-сигнала-1, содержащей 128 выборок временной области.
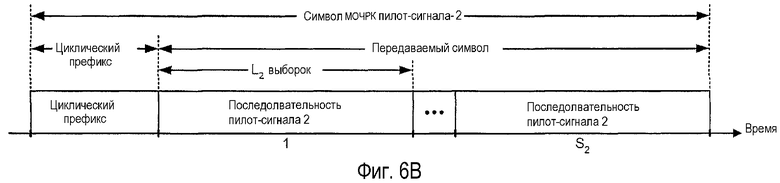
Фиг. 6B изображает представление временной области пилот-сигнала пилот-сигнала 2 МПВР. Символ МОЧРК для пилот-сигнала пилот-сигнала 2 МПВР (или "символ МОЧРК пилот-сигнала пилот-сигнала 2") также состоит из преобразованного символа длиной N и циклического префикса длиной C. Преобразованный символ для пилот-сигнала пилот-сигнала 2 МПВР содержит S2 идентичных последовательностей пилот-сигнала-2, с каждой последовательностью пилот-сигнала-2, содержащей L2 выборок временной области. Циклический префикс для пилот-сигнала пилот-сигнала 2 МПВР состоит из C крайних правых выборок преобразованного символа и вставляется перед преобразованным символом. Например, если N=4096, L2=2048, S2=2 и C=512, то символ МОЧРК пилот-сигнала 2 будет содержать две полные последовательности пилот-сигнала-2, с каждой последовательностью пилот-сигнала-2, содержащей 2048 выборок временной области. Циклический префикс для пилот-сигнала 2 МПВР будет содержать только часть последовательности пилот-сигнала-2.
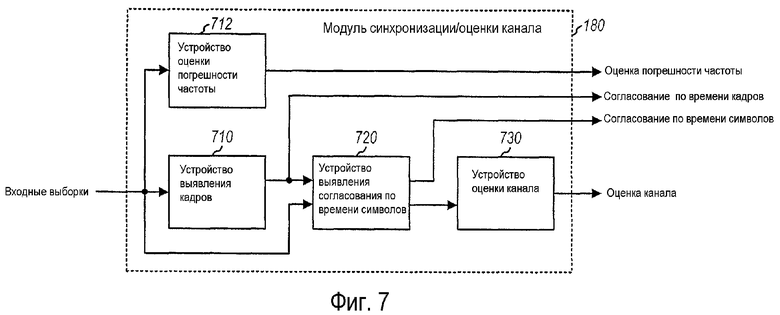
Фиг. 7 изображает блок-схему варианта осуществления модуля 180 синхронизации и оценки канала в беспроводном устройстве 150. В модуле 180, устройство 710 выявления кадров принимает входные выборки от модуля 154 приемника, обрабатывает входные выборки с целью выявления начала каждого кадра и обеспечивает согласование по времени кадров. Устройство 720 выявления согласования по времени символов принимает входные выборки и согласование по времени кадров, обрабатывает входные выборки с целью выявления начала принимаемых символов МОЧРК и обеспечивает согласование по времени символов. Устройство 712 оценки погрешности частоты оценивает погрешность частоты в принимаемых символах МОЧРК. Устройство 730 оценки канала принимает выходной сигнал от устройства 720 выявления согласования по времени символов и получает оценку канала. Устройства выявления и устройства оценки в модуле 180 описаны ниже.
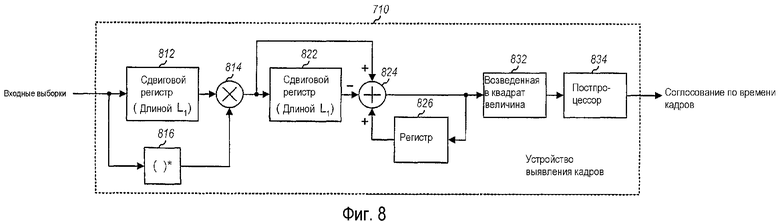
Фиг. 8 изображает блок-схему варианта осуществления устройства 710 выявления кадров, которое выполняет синхронизацию кадров посредством выявления пилот-сигнала 1 МПВР во входных выборках модуля 154 приемника. Для простоты, в последующем описании предполагается, что канал связи представляет собой канал с аддитивным белым гауссовым шумом (АБГШ). Входная выборка для каждого периода выборок может быть выражена как:
r
n=x
n+w
n, (1)
(1)
где n - индекс для периода выборок;
x n - выборка временной области, посылаемая базовой станцией в течение периода выборок n;
r n - входная выборка, полученная беспроводным устройством в течение периода выборок n; и
w n - шум для периода выборок n.
Для варианта осуществления, показанного на фиг. 8, устройство 710 выявления кадров реализовано с помощью устройства задержанной корреляции, которое использует периодический характер символа МОЧРК пилот-сигнала 1 с целью выявления кадра. В варианте осуществления устройство 710 выявления кадров для выявления кадра использует следующий показатель выявления:
 (2)
(2)
где Sn - показатель выявления для периода выборок n;
"*" обозначает комплексно сопряженную величину; и
|x|2 обозначает возведенную в квадрат величину x.
Уравнение (2) вычисляет задержанную корреляцию между двумя входными выборками ri и ri-L1 в двух последовательных последовательностях пилот-сигнала-1, или ci=ri-L1·ri*. Эта задержанная корреляция исключает влияние канала связи без необходимости в оценке коэффициента усиления канала и дополнительно когерентно объединяет энергию, принимаемую через канал связи. Затем уравнение (2) накапливает результаты корреляции для всех L1 выборок последовательности пилот-сигнала-пилот-сигнала-1 для получения накопленного результата корреляции Cn , который является комплексной величиной. Затем уравнение (2) выводит метрику решения Sn для периода выборок n как возведенную в квадрат величину Cn . Метрика решения Sn является показательной для энергии одной принятой последовательности пилот-сигнала-1 длиной L1, если имеется соответствие между двумя последовательностями, используемыми для задержанной корреляции.
В устройстве 710 выявления кадров сдвиговой регистр 812 (длиной L1) принимает, сохраняет и сдвигает входные выборки {rn} и обеспечивает входные выборки {rn-L1}, которые задержаны на L1 периодов выборок. Вместо сдвигового регистра 812 также может использоваться буфер для выборок. Модуль 816 также принимает входные выборки и обеспечивает комплексно-сопряженные входные выборки {rn*}. Для каждого периода выборок n умножитель 814 перемножает задержанную входную выборку rn-L1 от сдвигового регистра 812 с комплексно-сопряженной входной выборкой rn* от модуля 816 и передает результат корреляции cn в сдвиговой регистр 822 (длиной L1) и блок 824 суммирования. Буква нижнего регистра cn обозначает результат корреляции для одной входной выборки, и буква верхнего регистра Cn обозначает накопленный результат корреляции для L1 входных выборок. Сдвиговой регистр 822 принимает, сохраняет и задерживает результаты корреляции {cn} от умножителя 814 и обеспечивает результаты корреляции {cn-L1}, которые были задержаны на L1 периодов выборок. Для каждого периода выборок n, блок 824 суммирования принимает и суммирует выходной сигнал Cn-1 регистра 826 с результатом cn из умножителя 814, дополнительно вычитает задержанный результат cn-L1 из сдвигового регистра 822 и передает свой выходной сигнал Cn в регистр 826. Блок 824 суммирования и регистр 826 формируют накапливающий регистр, который выполняет операцию суммирования в уравнении (2). Сдвиговой регистр 822 и блок 824 суммирования также сконфигурированы для выполнения прохода или сдвигового суммирования L1 самых последних результатов корреляции cn-cn-L1+1. Этого достигают посредством сложения последнего результата корреляции cn из умножителя 814 и вычитания из результата корреляции cn-L1 из более ранних L1 периодов выборок, которые обеспечиваются сдвиговым регистром 822. Модуль 832 вычисляет возведенную в квадрат величину накопленного выходного сигнала Cn из блока 824 суммирования и обеспечивает показатель выявления Sn.
Постпроцессор 834 выявляет присутствие символа МОЧРК пилот-сигнала 1, а следовательно, начало суперкадра, основываясь на показателе выявления Sn и пороговом значении Sth , которое может быть фиксированным или программируемым значением. Выявление кадра может быть основано на различных критериях. Например, постпроцессор 834 может объявлять присутствие символа МОЧРК пилот-сигнала 1, если показатель выявления Sn (1) превышает пороговое значение Sth, (2) остается выше порогового значения Sth по меньшей мере на предварительно определенное процентное отношение от длины символа МОЧРК пилот-сигнала 1, и (3) после этого опускается ниже порогового значения Sth в течение предварительно определенного периода времени (одной последовательности пилот-сигнала-1). Постпроцессор 834 может указывать конец символа МОЧРК пилот-сигнала-1 (обозначенный как TC), как предварительно определенное количество периодов выборок до заднего фронта формы колебаний для показателя выявления Sn. Постпроцессор 834 также может устанавливать сигнал Согласования по Времени Кадра (например, на логически высокий) в конце символа МОЧРК пилот-сигнала 1. Время TC может использоваться как грубое согласование по времени символов для обработки символа МОЧРК пилот-сигнала 2.
Устройство 712 оценки погрешности частоты оценивает погрешность частоты в принятом символе МОЧРК пилот-сигнала 1. Эта погрешность частоты может возникать вследствие различных источников, таких, например, как разница в частотах задающих генераторов на базовой станции и беспроводном устройстве, доплеровский сдвиг частоты и так далее. Устройство 712 оценки погрешности частоты может формировать оценку погрешности частоты для каждой последовательности пилот-сигнала-1 (за исключением последней последовательности пилот-сигнала-1) следующим образом:
 (3)
(3)
где rl,i - i-ая входная выборка для l-ой последовательности пилот-сигнала-1;
Arg(x) - арктангенс отношения мнимой составляющей x к вещественной составляющей x, или Arg(x)=arctan [Im(x)/Re(x)];
GD - коэффициент усиления устройства выявления, который представляет собой  ; и
; и
Δ l - оценка погрешности частоты для l-ой последовательности пилот-сигнала-1.
l - оценка погрешности частоты для l-ой последовательности пилот-сигнала-1.
Диапазон выявляемых погрешностей частоты можно задавать как:
 или
или  ,
, (4)
(4)
где  - частота входных выборок. Уравнение (4) указывает, что диапазон выявляемых погрешностей частоты зависит от длины последовательности пилот-сигнала-1 и связан с ней обратно пропорционально. Устройство 712 оценки погрешности частоты также можно реализовывать внутри постпроцессора 834, поскольку накопленные результаты корреляции также поступают из блока 824 суммирования.
- частота входных выборок. Уравнение (4) указывает, что диапазон выявляемых погрешностей частоты зависит от длины последовательности пилот-сигнала-1 и связан с ней обратно пропорционально. Устройство 712 оценки погрешности частоты также можно реализовывать внутри постпроцессора 834, поскольку накопленные результаты корреляции также поступают из блока 824 суммирования.
Оценки погрешности частоты можно использовать различными способами. Например, оценку погрешности частоты для каждой последовательности пилот-сигнала-1 можно использовать для корректирования системы отслеживания частоты, которая пытается исправлять любую выявляемую погрешность частоты в беспроводном устройстве. Системой отслеживания частоты может быть система фазовой автоподстройки частоты (ФАПЧ), которая может регулировать частоту несущего сигнала, используемого для частоты преобразования с понижением частоты в беспроводном устройстве. Оценки погрешности частоты также могут быть усреднены для получения одной оценки погрешности частоты Δ для символа МОЧРК пилот-сигнала-1. Эту Δ можно затем использовать для коррекции погрешности частоты либо до, либо после N-точечного ДПФ (дискретного преобразования Фурье) в демодуляторе 160 МОЧРК. Для коррекции погрешности частоты после ДПФ, которая может использоваться для коррекции ухода частоты Δ, являющегося целым кратным разносу поддиапазонов, принимаемые символы от N-точечного ДПФ могут транслироваться Δ поддиапазонами, и откорректированный по частоте символ R̃k для каждого применяемого поддиапазона k может быть получен, как R̃k=R̃k+Δ
. Для коррекции погрешности частоты перед ДПФ входные выборки могут быть повернуты по фазе с помощью оценки погрешности частоты Δ, а затем может быть выполнено N-точечное ДПФ на повернутых по фазе выборках.
Выявление кадров и оценку погрешности частоты также можно выполнять другими способами, основанными на символе МОЧРК пилот-сигнала 1, и это находится в пределах объема изобретения. Например, выявление кадров может быть достигнуто посредством выполнения положительной корреляции между входными выборками для символа МОЧРК пилот-сигнала 1 с действительной последовательностью пилот-сигнала-1, формируемой на базовой станции. Положительная корреляция обеспечивает высокий результат корреляции для каждого события явного сигнала (или многолучевого распространения). Поскольку для данной базовой станции могут быть получены больше чем одно многолучевое распространение или пиковая величина, беспроводное устройство может выполнять последующую обработку на выявляемых пиковых величинах для получения информации о согласовании по времени. Выявление кадров также может быть достигнуто с помощью комбинации задержанной корреляции и положительной корреляции.
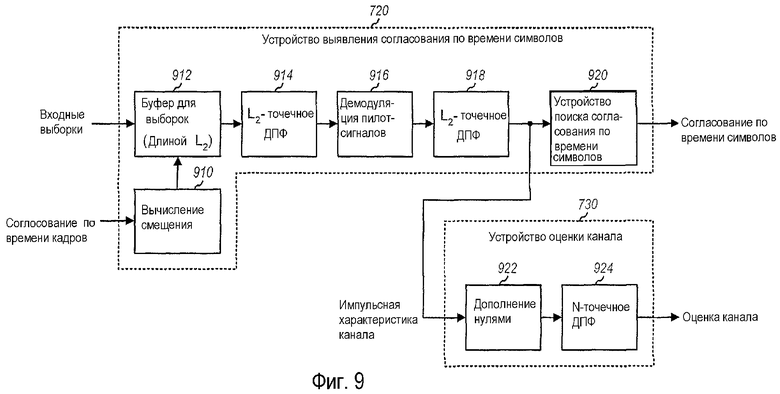
Фиг. 9 изображает блок-схему варианта осуществления устройства 720 выявления согласования по времени символов, которое выполняет синхронизацию согласования по времени, основываясь на символе МОЧРК пилот-сигнала 2. В устройстве 720 выявления согласования по времени символов буфер 912 для выборок принимает входные выборки от модуля 154 приемника и сохраняет окно "выборок" из L2 входных выборок для символа МОЧРК пилот-сигнала-2. Начало окна выборок определяется модулем 910 на основании согласовании по времени кадров из устройства 710 выявления кадров.
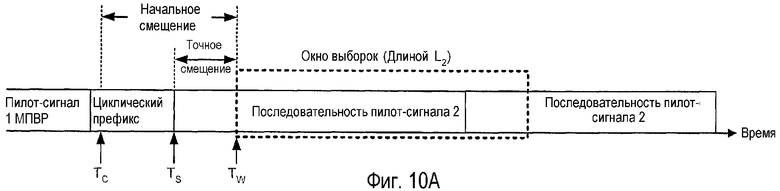
Фиг. 10A изображает временную диаграмму обработки для символа МОЧРК пилот-сигнала-2. Устройство 710 выявления кадров обеспечивает грубое согласование по времени символов (обозначенное как TC), основываясь на символе МОЧРК пилот-сигнала-1. Символ МОЧРК пилот-сигнала-2 содержит S2 идентичных последовательностей пилот-сигнала-2 длиной L2 (например, две последовательности пилот-сигнала-2 длиной 2048, если N=4096 и L2=2048). Окно из L2 входных выборок собирается буфером 912 для выборок для символа МОЧРК пилот-сигнала-2, начинающихся в период выборок TW. Начало окна выборок задерживается на начальное смещение OSinit от грубого согласования по времени символов, или TW=TC+OSinit. Начальное смещение не должно быть точным и выбирается так, чтобы гарантировать, что в буфере 912 для выборок собрана одна законченная последовательность пилот-сигнала-2. Начальное смещение также можно выбирать так, что обработка для символа МОЧРК пилот-сигнала-2 может быть закончена перед прибытием следующего символа МОЧРК, чтобы к этому следующему символу МОЧРК можно было применять согласование по времени символов, полученное из символа МОЧРК пилот-сигнала-2.
Обращаясь вновь к фиг. 9, отметим, что модуль 914 ДПФ выполняет L2-точечное ДПФ на L2 входных выборках, собранных буфером 912 для выборок, и обеспечивает L2 значений частотной области для L2 принимаемых символов пилот-сигналов. Если начало окна выборок не выровнено с началом символа МОЧРК пилот-сигнала-2 (то есть, TW≠Ts), то импульсная характеристика канала сдвигается по кругу, что означает, что передняя часть импульсной характеристики канала повернулась по кругу к задней части. Модуль 916 демодуляции пилот-сигналов устраняет модуляцию на L2 символах принимаемых пилот-сигналов, перемножая принятый символ пилот-сигнала Rk для каждого поддиапазона k пилот-сигнала с комплексно-сопряженной величиной известного символа Pk* пилот-сигнала для этого поддиапазона, или Rk ·Pk*. Модуль 916 также устанавливает принятые символы пилот-сигналов для неиспользованных поддиапазонов на нулевые символы. Затем модуль 918 ОДПФ выполняет L2-точечное ОДПФ на L2 демодулированных символах пилот-сигнала и обеспечивает L2 значений временной области, которые являются L2 отводами импульсной характеристики канала связи между базовой станцией 110 и беспроводным устройством 150.
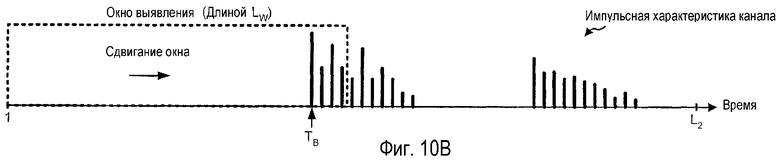
Фиг. 10B изображает импульсную характеристику L2-отводного канала модуля 918 ОДПФ. Каждый из L2 отводов связан с комплексным коэффициентом усиления канала в этой линии задержки с отводами. Импульсная характеристика канала может быть циклически сдвинута, что означает, что хвостовая часть импульсной характеристики канала может повернуться вокруг и предстать в начальной части выходного сигнала модуля 918 ОДПФ.
Обращаясь снова к фиг. 9, отметим, что устройство 920 поиска согласования по времени символов может определять согласование по времени символов, выполняя поиск пикового значения в энергии импульсной характеристики канала. Выявление пикового значения может быть достигнуто посредством сдвигания окна "выявления" по импульсной характеристике канала, как обозначено на фиг. 10B. Размер окна выявления может быть определен как описано ниже. В каждой исходной позиции окна вычисляется энергия всех отводов, попадающих в окно выявления.
Фиг. 10C изображает график энергии отводов канала в различных исходных позициях окна. Окно выявления сдвинуто вправо по кругу так, что когда правый край окна выявления достигает последнего отвода с индексом L2, окно оборачивается вокруг к первому отводу с индексом 1. Таким образом, собирается энергия для одинакового количества отводов канала для каждой исходной позиции окна.
Размер LW окна выявления может быть выбран на основании ожидаемого разброса по задержке системы. Разброс по задержке в беспроводном устройстве представляет собой разницу во времени между самым ранним и самым последним прибывающими компонентами сигнала в беспроводном устройстве. Разброс по задержке системы является самым большим разбросом по задержке среди всех беспроводных устройств в системе. Если размер окна выявления равен или больше, чем разброс по задержке системы, то окно выявления, когда оно должным образом выровнено, может собрать всю энергию импульсной характеристики канала. Размер LW окна выявления также можно выбирать таким образом, чтобы оно не превышало половину L2 (или LW≤L2/2), чтобы избежать неоднозначности в выявлении начала импульсной характеристики канала. Начало импульсной характеристики канала может быть выявлено посредством (1) определения пиковой энергии среди всех L2 исходных позиций окна и (2) идентифицирования самой правой исходной позиции окна с пиковой энергией, если множество исходных позиций окна имеют одинаковую пиковую энергию. Энергии для различных исходных позиций окна также могут быть усреднены или отфильтрованы для получения более точной оценки начала импульсной характеристики канала в канале с помехами. В любом случае, начало импульсной характеристики канала обозначается как TB, а смещение между началом окна выборок и началом импульсной характеристики канала представляет собой TOS=TB-TW. Точное согласования по времени символов может быть однозначно вычислено, как только определено начало импульсной характеристики канала TB.
Рассмотрим фиг. 10A, на которой точное согласование по времени символов служит признаком начала принимаемого символа МОЧРК. Точное согласование по времени Ts символов можно использовать для размещения точно и надлежащим образом окна "ДПФ" для каждого принимаемого впоследствии символа МОЧРК. Окно ДПФ указывает определенные N входных выборок (из числа N+C входных выборок) для собирания для каждого принимаемого символа МОЧРК. Затем N входных выборок в пределах окна ДПФ преобразуются с помощью N-точечного ДПФ для получения N принимаемых символов данных/пилот-сигналов для принятого символа МОЧРК. Необходимо точное размещение окна ДПФ для каждого принятого символа МОЧРК, чтобы избегать (1) межсимвольной интерференции (МСИ) от предшествующего или следующего символа МОЧРК, (2) деградации оценки канала (например, неправильное размещение окна ДПФ может приводить к ошибочной оценке канала), (3) ошибок в процессах, которые полагаются на циклический префикс (например, в системе отслеживания частоты, автоматической регулировки усиления (АРУ) и так далее) и (4) других вредных влияний.
Символ МОЧРК пилот-сигнала-2 также можно использовать для получения более точной оценки погрешности частоты. Например, погрешность частоты может быть оценена с использованием последовательностей пилот-сигнала-2 и на основании уравнения (3). В этом случае, суммирование выполняется по L2 выборкам (вместо L1 выборок) для последовательности пилот-сигнала-2.
Для выведения оценки частотной характеристики для канала связи между базовой станцией 110 и беспроводным устройством 150 можно также использовать импульсную характеристику канала модуля 918 ОДПФ. Модуль 922 принимает импульсную характеристику L2-отводного канала, сдвигает по кругу импульсную характеристику канала так, чтобы начало импульсной характеристики канала находилось на индексе 1, вставляет соответствующее количество нулей после сдвигания по кругу импульсной характеристики канала и обеспечивает N-отводную импульсную характеристику канала. Затем модуль 924 ДПФ выполняет N-точечное ДПФ на N-отводной импульсной характеристике канала и обеспечивает оценку частотной характеристики, которая состоит из N комплексных коэффициентов усиления канала для N суммарных поддиапазонов. Демодулятор 160 МОЧРК может использовать оценку частотной характеристики с целью выявления принимаемых символов данных в последующих символах МОЧРК. Оценка канала также может быть получена некоторым другим способом.
Фиг. 11 изображает схему передачи пилот-сигналов с комбинацией пилот-сигналов МПЧР и МПВР. Базовая станция 110 может передавать пилот-сигналы 1 и 2 МПВР в каждом суперкадре, чтобы облегчить начальный захват беспроводными устройствами. Служебная информация для пилот-сигналов МПВР представляет собой два символа МОЧРК, которые могут быть маленькими по сравнению с размером суперкадра. Базовая станция также может передавать пилот-сигнал МПЧР во всех, большинстве или некоторых из остающихся символов МОЧРК в каждом суперкадре. Для варианта осуществления, показанного на фиг. 11, пилот-сигнал МПЧР посылается на чередующихся наборах поддиапазонов так, что символы пилот-сигналов посылаются на одном наборе поддиапазонов в четных периодах символов и на другом наборе поддиапазонов в нечетных периодах символов. Каждый набор содержит достаточное количество (Lfdm) поддиапазонов для поддержания оценки канала и возможно отслеживания частоты и времени беспроводными устройствами. Поддиапазоны в каждом наборе могут быть равномерно распределены по N суммарным поддиапазонам и равномерно разнесены друг от друга Sfdm=N/Lfdm поддиапазонами. Кроме того, поддиапазоны в одном наборе могут быть расположены в шахматном порядке или смещены относительно поддиапазонов в другом наборе таким образом, чтобы поддиапазоны в двух наборах перемежались друг с другом. В качестве примера, N=4096, Lfdm=512, Sfdm=8, и поддиапазоны в двух наборах могут быть расположены в шахматном порядке по четыре поддиапазона. В общем, для пилот-сигнала МПЧР можно использовать любое количество наборов поддиапазонов, и каждый набор может содержать любое количество поддиапазонов и любой из N суммарных поддиапазонов.
Беспроводное устройство может использовать пилот-сигналы 1 и 2 МПВР для начальной синхронизации, например, синхронизации кадров, оценки смещения частоты и получения точного согласования по времени символов (для надлежащего размещения окна ДПФ для последующих символов МОЧРК). Беспроводное устройство может выполнять начальную синхронизацию, например, при доступе к базовой станции впервые, при приеме или запросе данных впервые или после длительного периода бездеятельности, при первом включении и так далее.
Беспроводное устройство может выполнять задержанную корреляцию последовательности пилот-сигнала-1 с целью выявления присутствия символа МОЧРК пилот-сигнала-1 и, таким образом, начала суперкадра, как описано выше. После этого беспроводное устройство может использовать последовательности пилот-сигнала-1, чтобы оценивать погрешность частоты в символе МОЧРК пилот-сигнала-1 и проводить коррекцию для этой погрешности частоты до приема символа МОЧРК пилот-сигнала-2. Символ МОЧРК пилот-сигнала-1 обеспечивает возможность оценки большей погрешности частоты и более надежного размещения окна ДПФ для следующего символа МОЧРК (пилот-сигнала-2), чем обычные способы, которые используют структуру циклического префикса символа МОЧРК данных. Таким образом, символ МОЧРК пилот-сигнала-1 может обеспечивать улучшенные рабочие характеристики для наземного канала радиосвязи с большим разбросом по задержке при многолучевом распространении.
Беспроводное устройство может использовать символ МОЧРК пилот-сигнала-2 для получения точного согласования по времени символов, чтобы более точно размещать окно ДПФ для последующих принимаемых символов МОЧРК. Беспроводное устройство также может использовать символ МОЧРК пилот-сигнала-2 для оценки канала и оценки погрешности частоты. Символ МОЧРК пилот-сигнала-2 обеспечивает возможность быстрого и точного определения точного согласования по времени символов и надлежащего размещения окна ДПФ.
Беспроводное устройство может использовать пилот-сигнал МПЧР для оценки канала и отслеживания времени и, возможно, для отслеживания частоты. Беспроводное устройство может получать начальную оценку канала, основываясь на символе МОЧРК пилот-сигнала-2, как описано выше. Беспроводное устройство может использовать пилот-сигнал МПЧР для получения более точной оценки канала, особенно если пилот-сигнал МПЧР передается через суперкадр, как показано на фиг. 11. Беспроводное устройство также может использовать пилот-сигнал МПЧР для корректирования системы отслеживания частоты, которая может выполнять корректирование для погрешности частоты в принимаемых символах МОЧРК. Беспроводное устройство дополнительно может использовать пилот-сигнал МПЧР для корректирования системы отслеживания времени, которая может принимать во внимание дрейф согласования по времени во входных выборках (например, из-за изменений в импульсной характеристике канала связи).
Описанные в данном описании способы синхронизации могут быть реализованы с помощью различных средств. Например, эти способы могут быть реализованы в аппаратном обеспечении, программном обеспечении или их комбинации. Для реализации в аппаратном обеспечении устройства обработки данных на базовой станции, используемые для поддерживания синхронизации (например, процессор 120 ПРД данных и пилот-сигналов), могут быть реализованы в одной или более интегральных схемах прикладной ориентации (ИСПО), цифровых процессорах сигналов (ЦПС), устройствах цифровой обработки сигналов (УЦОС), программируемых логических устройствах (ПЛУ), программируемых пользователем вентильных матрицах (ППВМ), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных модулях, предназначенных для выполнения функций, описанных в данном описании, или их комбинации. Устройства обработки данных в беспроводном устройстве, используемые для выполнения синхронизации (например, модуль 180 синхронизации и оценки канала), также могут быть реализованы в одной или более ИСПО, ЦПС и так далее.
Для реализации в программном обеспечении способы синхронизации могут быть реализованы с помощью модулей (например, процедур, функций и так далее), которые выполняют описанные здесь функции. Коды программного обеспечения могут быть сохранены в запоминающем устройстве (например, запоминающем устройстве 192 на фиг. 1) и выполняться процессором (например, контроллером 190). Запоминающее устройство может быть реализовано в процессоре или вне процессора.
Предыдущее описание раскрытых вариантов осуществления обеспечено для того, чтобы дать возможность любому специалисту в данной области техники выполнять или использовать настоящее изобретение. Специалистам в данной области техники будут очевидны различные модификации этих вариантов осуществления, а определенные в данном описании универсальные принципы можно применять к другим вариантам осуществления, не отступая при этом от объема или сущности изобретения. Таким образом, настоящее изобретение не предназначено для ограничения показанными в данном описании вариантами осуществления, но должно соответствовать самому широкому объему, совместимому с принципами и новыми признаками, раскрытыми в данном описании.


Изобретение относится к системам передачи данных и, в частности, к синхронизации в беспроводной широковещательной системе, использующей мультиплексирование с ортогональным частотным разделением каналов (МОЧРК). Техническим результатом является эффективное достижение синхронизации. Передатчик в беспроводной широковещательной системе с МОЧРК осуществляет широковещательную передачу первого пилот-сигнала мультиплексирования с временным разделением (МПВР) в первом наборе поддиапазонов, сопровождаемого вторым пилот-сигналом МПВР во втором наборе поддиапазонов в каждом кадре. Поддиапазоны в каждом наборе выбираются из числа N суммарных поддиапазонов так, что (1) символ МОЧРК для первого пилот-сигнала МПВР содержит по меньшей мере S1 идентичных последовательностей пилот-сигнала-1 длиной L1 и (2) символ МОЧРК для второго пилот-сигнала МПВР содержит по меньшей мере S2 идентичных последовательностей пилот-сигнала-2 длиной L2. Передатчик также может осуществлять широковещательную передачу пилот-сигнала МПЧР. Приемник обрабатывает первый пилот-сигнал МПВР для получения согласования по времени кадров и дополнительно обрабатывает второй пилот-сигнал МПВР для получения согласования по времени символов. 6 н. и 37 з.п. ф-лы, 11 ил.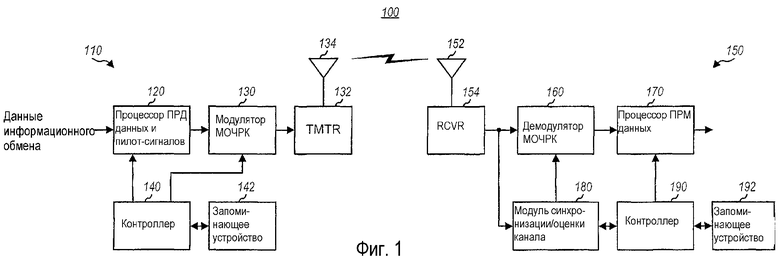
1. Способ передачи пилот-сигналов в беспроводной широковещательной системе, использующей мультиплексирование с ортогональным частотным разделением каналов (МОЧРК), содержащий
передачу первого пилот-сигнала в первом наборе частотных поддиапазонов способом мультиплексирования с временным разделением (МПВР) с данными, в котором первый набор включает в себя часть от N суммарных частотных поддиапазонов в системе, где N - целое число, превышающее единицу, и
передачу второго пилот-сигнала во втором наборе частотных поддиапазонов способом МПВР с данными, в котором второй набор включает в себя большее количество поддиапазонов, чем первый набор, и в котором первый и второй пилот-сигналы используются для синхронизации приемниками в системе.
2. Способ по п.1, в котором первый и второй пилот-сигналы периодически передаются в каждом кадре предварительно определенной продолжительности времени.
3. Способ по п.2, в котором первый пилот-сигнал передаются в начале каждого кадра, а второй пилот-сигнал передается в следующем кадре.
4. Способ по п.2, в котором первый пилот-сигнал используется для выявления начала каждого кадра, и в котором второй пилот-сигнал используется для определения согласования по времени символов, указывающего на начало принимаемых символов МОЧРК.
5. Способ по п.1, в котором первый пилот-сигнал передается в одном символе МОЧРК.
6. Способ по п.1, в котором первый набор включает в себя N/2M частотных поддиапазонов, где М - целое число, превышающее единицу.
7. Способ по п.1, в котором второй пилот-сигнал передается в одном символе МОЧРК.
8. Способ по п.1, в котором второй набор включает в себя N/2K частотных поддиапазонов, где K - целое число, равное единице или больше.
9. Способ по п.1, в котором второй набор включает в себя N/2 частотных поддиапазонов.
10. Способ по п.1, в котором частотные поддиапазоны в каждом из первого и второго наборов равномерно распределены по N суммарным частотным поддиапазонам.
11. Способ по п.1, в котором первый пилот-сигнал дополнительно используется для оценки погрешности частоты приемниками.
12. Способ по п.1, в котором второй пилот-сигнал дополнительно используется для оценки канала приемниками.
13. Способ по п.1, дополнительно содержащий передачу третьего пилот-сигнала в третьем наборе частотных поддиапазонов способом мультиплексирования с частотным разделением (МПЧР) с данными, в котором первый и второй пилот-сигналы используются приемниками для получения согласования по времени кадров и символов, и в котором третий пилот-сигнал используется приемниками для отслеживания частоты и времени.
14. Способ по п.13, в котором третий пилот-сигнал дополнительно используется для оценки канала.
15. Способ по п.1, дополнительно содержащий формирование первого и второго пилот-сигналов с помощью генератора псевдослучайный чисел (ПСЧ).
16. Способ по п.15, дополнительно содержащий инициализацию генератора ПСЧ в первое начальное состояние для первого пилот-сигнала, и инициализацию генератора ПСЧ во второе начальное состояние для второго пилот-сигнала.
17. Способ по п.15, в котором генератор ПСЧ также используется для скремблирования данных перед передачей.
18. Способ по п.1, дополнительно содержащий формирование первого пилот-сигнала, второго пилот-сигнала, или каждого из первого и второго пилот-сигналов с данными, выбираемыми для снижения изменения средней амплитуды в форме колебаний временной области для пилот-сигнала.
19. Устройство для передачи пилот-сигналов в системе мультиплексирования с ортогональным частотным разделением каналов (МОЧРК), содержащее
модулятор, действующий для обеспечения первого пилот-сигнала в первом наборе частотных поддиапазонов способом мультиплексирования с временным разделением (МПВР) с данными и обеспечения второго пилот-сигнала во втором наборе частотных поддиапазонов способом МПВР с данными, в котором первый набор включает в себя часть от N суммарных частотных поддиапазонов в системе, где N - целое число, превышающее единицу, и в котором второй набор включает в себя большее количество поддиапазонов, чем первый набор, и
модуль передатчика, действующий для передачи первого и второго пилот-сигналов, в котором первый и второй пилот-сигналы используются для синхронизации приемниками в системе.
20. Устройство по п.19, в котором первый и второй пилот-сигналы периодически передаются в каждом кадре предварительно определенной продолжительности времени.
21. Устройство для передачи пилот-сигналов в системе мультиплексирования с ортогональным частотным разделением каналов (МОЧРК), содержащее
средство для передачи первого пилот-сигнала в первом наборе частотных поддиапазонов способом мультиплексирования с временным разделением (МПВР) с данными, в котором первый набор включает в себя часть от N суммарных частотных поддиапазонов в системе, где N - целое число, превышающее единицу, и
средство для передачи второго пилот-сигнала во втором наборе частотных поддиапазонов способом МПВР с данными, в котором второй набор включает в себя большее количество поддиапазонов, чем первый набор, и в котором первый и второй пилот-сигналы используются для синхронизации приемниками в системе.
22. Устройство по п.21, в котором первый и второй пилот-сигналы периодически передаются в каждом кадре предварительно определенной продолжительности времени.
23. Способ выполнения синхронизации в системе мультиплексирования с ортогональным частотным разделением каналов (МОЧРК), содержащий
обработку первого пилот-сигнала, принимаемого через канал связи, для выявления начала каждого кадра предварительно определенной продолжительности времени, в котором первый пилот-сигнал передается в первом наборе частотных поддиапазонов способом мультиплексирования с временным разделением (МПВР) с данными, и в котором первый набор включает в себя часть от N суммарных частотных поддиапазонов в системе, где N - целое число, превышающее единицу, и
обработку второго пилот-сигнала, принимаемого через канал связи, для получения согласования по времени символов, указывающего на начало принимаемых символов МОЧРК, в котором второй пилот-сигнал передается во втором наборе частотных поддиапазонов способом МПВР с данными, и в котором второй набор включает в себя большее количество поддиапазонов, чем первый набор.
24. Способ по п.23, в котором первый и второй пилот-сигналы периодически передаются в каждом кадре предварительно определенной продолжительности времени.
25. Способ по п.23, в котором обработка первого пилот-сигнала содержит выведение показателя выявления на основании задержанной корреляции между выборками во множестве последовательностей выборок, принимаемых для первого пилот-сигнала, и выявление начала каждого кадра, основываясь на показателе выявления.
26. Способ по п.25, в котором начало каждого кадра дополнительно выявляется на основании порогового значения показателя.
27. Способ по п.26, в котором начало кадра выявляется, если показатель выявления превышает пороговое значение показателя для предварительно определенной продолжительности времени в течение первого пилот-сигнала.
28. Способ по п.26, в котором выявляется начало кадра, если показатель выявления превышает пороговое значение показателя для процентного отношения от времени в течение первого пилот-сигнала и остается ниже порогового значения показателя для предварительно определенной продолжительности времени после этого.
29. Способ по п.23, в котором обработка первого пилот-сигнала содержит выведение показателя выявления, основываясь на положительной корреляции между выборками, принимаемыми для первого пилот-сигнала, и математических ожиданиях для первого пилот-сигнала, и выявление начала каждого кадра на основании показателя выявления.
30. Способ по п.23, в котором обработка второго пилот-сигнала содержит получение оценки импульсной характеристики канала, основываясь на принимаемом втором пилот-сигнале, определение начала оценки импульсной характеристики канала, и выведение согласования по времени символов, основываясь на начале оценки импульсной характеристики канала.
31. Способ по п.30, в котором оценка импульсной характеристики канала содержит L отводов канала, где L - целое число, превышающее единицу, и в котором начало оценки импульсной характеристики канала определяется на основании L отводов канала.
32. Способ по п.31, в котором определение начала оценки импульсной характеристики канала содержит определение, для каждой из множества позиций окна, энергии отводов канала, попадающих в окно, и установку начала оценки импульсной характеристики канала на позицию окна с самой высокой энергией из множества позиций окна.
33. Способ по п.32, в котором начало оценки импульсной характеристики канала устанавливается на самую правую позицию окна с самой высокой энергией, если самую высокую энергию имеют множество позиций окна.
34. Способ по п.23, дополнительно содержащий обработку первого пилот-сигнала, чтобы оценить погрешность частоты в принимаемом символе МОЧРК для первого пилот-сигнала.
35. Способ по п.23, дополнительно содержащий обработку второго пилот-сигнала, чтобы оценить погрешность частоты в принимаемом символе МОЧРК для второго пилот-сигнала.
36. Способ по п.23, дополнительно содержащий обработку второго пилот-сигнала для получения оценки канала для канала связи.
37. Способ по п.23, дополнительно содержащий обработку третьего пилот-сигнала, принимаемого через канал связи, для отслеживания частоты и времени, в котором третий пилот-сигнал передается в третьем наборе частотных поддиапазонов способом мультиплексирования с частотным разделением (МПЧР) с данными.
38. Устройство для выполнения синхронизации в системе мультиплексирования с ортогональным частотным разделением каналов (МОЧРК), содержащее
устройство выявления кадров, действующее для обработки первого пилот-сигнала, принимаемого через канал связи, для выявления начала каждого кадра предварительно определенной продолжительности времени, в котором первый пилот-сигнал передается в первом наборе частотных поддиапазонов способом мультиплексирования с временным разделением (МПВР) с данными, и в котором первый набор включает в себя часть от N суммарных частотных поддиапазонов в системе, где N - целое число, превышающее единицу, и
устройство выявления согласования по времени символов, действующее для обработки второго пилот-сигнала, принимаемого через канал связи, для получения согласования по времени символов, указывающего на начало принимаемых символов МОЧРК, в котором второй пилот-сигнал передается во втором наборе частотных поддиапазонов способом МПВР с данными, и в котором второй набор включает в себя большее количество поддиапазонов, чем первый набор.
39. Устройство по п.38, в котором первый и второй пилот-сигналы периодически передаются в каждом кадре предварительно определенной продолжительности времени.
40. Устройство по п.38, в котором устройство выявления кадров действует для получения показателя выявления на основании корреляции между выборками во множестве последовательностей выборок, принимаемых для первого пилот-сигнала, и для выявления начала каждого кадра, основываясь на показателе выявления.
41. Устройство по п.38, в котором устройство выявления согласования по времени символов действует для получения оценки импульсной характеристики канала, основываясь на принимаемом втором пилот-сигнале, определения начала оценки импульсной характеристики канала, и получения согласования по времени символов, основываясь на начале оценки импульсной характеристики канала.
42. Устройство для выполнения синхронизации в системе мультиплексирования с ортогональным частотным разделением каналов (МОЧРК), содержащее
средство для обработки первого пилот-сигнала, принимаемого через канал связи, для выявления начала каждого кадра предварительно определенной продолжительности времени, в котором первый пилот-сигнал передается в первом наборе частотных поддиапазонов способом мультиплексирования с временным разделением (МПВР) с данными, и в котором первый набор включает в себя часть от N суммарных частотных поддиапазонов в системе, где N - целое число, превышающее единицу, и
средство для обработки второго пилот-сигнала, принимаемого через канал связи, для получения согласования по времени символов, указывающего на начало принимаемых символов МОЧРК, в котором второй пилот-сигнал передается во втором наборе частотных поддиапазонов способом МПВР с данными, и в котором второй набор включает в себя большее количество поддиапазонов, чем первый набор.
43. Устройство по п.42, в котором первый и второй пилот-сигналы периодически передаются в каждом кадре предварительно определенной продолжительности времени.
| US 5732113 А, 24.03.1998 | |||
| Покрытые электроды для электродуговой резки металлов | 1949 |
|
SU77961A1 |
| WO 03036812 А1, 01.05.2003 | |||
| СПОСОБ УСТАНОВКИ РАЗМЕРА ОКНА ПОИСКА ДЛЯ МОБИЛЬНОЙ СТАНЦИИ В СОТОВОЙ СИСТЕМЕ | 1999 |
|
RU2157059C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПОДВИЖНОЙ СТАНЦИИ ДЛЯ ПРИЕМА СИГНАЛОВ, ПЕРЕДАННЫХ ОТ БАЗОВОЙ СТАНЦИИ | 1999 |
|
RU2181529C2 |

