I. Притязание на приоритет по §119 раздела 35 кодекса законов США
Настоящая заявка на патент испрашивает приоритет предварительной патентной заявки № 60/618345 под названием "Масштабирование ЛОП (логарифмического отношения правдоподобия) для передач МОЧРК (мультиплексирования с ортогональным частотным разделением каналов) с перекрытием в системах МРВ (мультиплексирования с разделением времени)", зарегистрированной 12 октября 2004 г., переуступленной ее правопреемнику, и которая полностью включена здесь путем ссылки.
Предшествующий уровень техники
I. Область техники, к которой относится изобретение
Настоящее раскрытие относится в общем к средствам связи и более конкретно к методам выполнения обнаружения и декодирования данных в системе связи.
II. Предшествующий уровень техники
Система связи может использовать множество частотных поддиапазонов для передачи данных и пилот-сигналов (контрольных сигналов). Эти поддиапазоны могут также называться тональными сигналами, поднесущими, элементами дискретизации и так далее и могут быть получены с помощью метода мультиплексирования с ортогональным частотным разделением каналов (МОЧРК) или некоторых других методов модуляции. С МОЧРК каждый поддиапазон связан с соответствующей поднесущей, которая может модулироваться данными потока обмена информацией или контрольным сигналом. Контрольный сигнал представляет собой данные, которые известны a priory и передатчику, и приемнику. Передатчик обычно посылает контрольный сигнал, чтобы обеспечить возможность приемнику оценивать характеристику канала связи между передатчиком и приемником.
Система связи может не использовать все доступные поддиапазоны для передачи. Например, предварительно определенное количество поддиапазонов на каждом из двух краев полосы пропускания могут использоваться в качестве защитных поддиапазонов, чтобы обеспечить возможность системе удовлетворять требованиям спектрального маскирования. В защитных поддиапазонах передачи не пересылаются, а данные и контрольный сигнал могут пересылаться в остальных используемых поддиапазонах.
Защитные поддиапазоны обычно оказывают отрицательное воздействие на оценку канала, поскольку в этих поддиапазонах никакая полезная информация не пересылается. Ухудшенная оценка канала вследствие защитных поддиапазонов может неблагоприятно влиять на обнаружение и декодирование данных, пересылаемых в используемых поддиапазонах.
Поэтому в технике имеется необходимость в методах учета отрицательных влияний, обусловленных защитными поддиапазонами.
Сущность изобретения
В данном описании описаны методы выполнения обнаружения и декодирования данных способом, учитывающим защитные поддиапазоны. В соответствии с вариантом осуществления изобретения описано устройство, которое включает в себя по меньшей мере один процессор и запоминающее устройство. Процессор (процессоры) выводит оценки шума и ошибок оценок, обусловленные по меньшей мере одним поддиапазоном контрольных сигналов, являющимся обнуленным и не используемым для передачи контрольных сигналов. Процессор (процессоры) вычисляет логарифмические отношения правдоподобия (ЛОП) с использованием оценок шума и ошибок оценок.
В соответствии с другим вариантом осуществления обеспечен способ, в котором выводятся оценки шума и ошибок оценок, обусловленные по меньшей мере одним обнуленным поддиапазоном контрольных сигналов. Затем вычисляются отношения ЛОП с использованием оценок шума и ошибок оценок.
В соответствии с еще одним вариантом осуществления описано устройство, которое включает в себя средство для выведения оценок шума и ошибок оценок, обусловленных по меньшей мере одним обнуленным поддиапазоном контрольных сигналов, и средство для вычисления отношений ЛОП с использованием оценок шума и ошибок оценок.
В соответствии с еще одним вариантом осуществления описано устройство, которое включает в себя по меньшей мере один процессор и запоминающее устройство. Процессор (процессоры) получает принимаемые символы контрольных сигналов для поддиапазонов контрольных сигналов и принимаемые символы данных для поддиапазонов данных. Затем процессор (процессоры) выводит оценки канала, основываясь на принимаемых символах контрольных сигналов и по меньшей мере одном нуле по меньшей мере для одного обнуленного поддиапазона контрольных сигналов. Процессор (процессоры) выполняет обнаружение данных на принимаемых символах данных с помощью оценок канала для получения оценок символов данных, выводит оценки шума и ошибок оценок, обусловленные по меньшей мере одним обнуленным поддиапазоном контрольных сигналов, и вычисляет отношения ЛОП, основываясь на оценках символов данных, оценках канала и оценках шума и ошибок оценок.
Ниже более подробно описаны различные аспекты и варианты осуществления изобретения.
Краткое описание чертежей
Фиг. 1 изображает блок-схему передатчика и приемника.
Фиг. 2 изображает примерную структуру поддиапазона для передачи данных и контрольных сигналов.
Фиг. 3 изображает блок-схему принимающего (ПРМ) процессора для обработки данных в приемнике.
Фиг. 4 изображает процесс, выполняемый приемником, чтобы принимать передачу данных.
Подробное описание
Слово "примерный" используется в данном описании, чтобы обозначать "служащий в качестве примера, образца или иллюстрации". Любой вариант осуществления, описанный в данном описании как "примерный", не обязательно должен рассматриваться как предпочтительный или выгодный по сравнению с другими вариантами осуществления.
Методы обработки приемника, описанные в данном описании, могут использоваться для различных систем связи, таких как система МОЧРК, система доступа с мультиплексированием с ортогональным частотным разделением каналов (ДМОЧРК), система множественного доступа с частотным разделением каналов с единственной несущей (МДЧРК-ЕН), и так далее. Система ДМОЧРК использует МОЧРК. Система МДЧРК-ЕН может использовать перемежаемый МДЧРК (П-МДЧРК), чтобы передавать в поддиапазонах, которые распределены по ширине полосы пропускания системы, локализированный МДЧРК (Л-МДЧРК), чтобы передавать в блоке смежных поддиапазонов, или расширенный МДЧРК (Р-МДЧРК), чтобы передавать в множестве блоков смежных поддиапазонов. В общем, модуляционные символы посылаются в частотной области с МОЧРК и во временной области с МДЧРК-ЕН.
Фиг. 1 изображает блок-схему передатчика 110 и приемника 150 в системе 100 беспроводной связи. Для простоты, и передатчик 110, и приемник 150 каждый оборудован единственной антенной. Для нисходящей линии связи (или прямой линии связи) передатчик 110 может быть частью базовой станции, а приемник 150 может быть частью терминала. Для восходящей линии связи (или обратной линии связи) передатчик 110 может быть частью терминала, а приемник 150 может быть частью базовой станции. Базовая станция в общем представляет собой стационарную станцию и также может называться приемопередающей базовой системой (ППБС), точкой доступа, узлом В, или может использоваться некоторая другая терминология. Терминал может быть зафиксированным или передвижным, и он может быть беспроводным устройством, сотовым телефоном, персональным цифровым ассистентом (ПЦА), беспроводной модемной платой и так далее.
В передатчике 110 процессор 112 контрольных сигналов генерирует символы контрольных сигналов. Передающий (ПРД) процессор 114 для обработки данных обрабатывает (например, кодирует, перемежает и посимвольно отображает) данные потока обмена информацией и генерирует символы данных. Как используется в данном описании, символ данных представляет собой модуляционный символ для данных, символ контрольного сигнала представляет собой модуляционный символ для контрольного сигнала, модуляционный символ является комплексной величиной для точки в совокупности сигналов (например, для ФМН (фазовой манипуляции) или КАМ (квадратурной амплитудной модуляции)), а символ является комплексной величиной. Модулятор 120 принимает и мультиплексирует символы данных и символы контрольных сигналов, выполняет модуляцию (например, для МОЧРК или МДЧРК-ЕН) на мультиплексированных символах данных и контрольных сигналах и генерирует передаваемые символы. Модуль передатчика (ПРДТ) 132 обрабатывает (например, преобразовывает в аналоговую форму, усиливает, фильтрует и преобразовывает с повышением частоты) передаваемые символы и генерирует радиочастотный (РЧ) модулированный сигнал, который передается через антенну 134.
В приемнике 150 антенна 152 принимает модулированный РЧ сигнал от передатчика 110 и передает принимаемый сигнал в модуль приемника (ПРМК) 154. Модуль 154 приемника приводит в требуемое состояние (например, фильтрует, усиливает, преобразовывает с понижением частоты и оцифровывает) принимаемый сигнал и обеспечивает входные выборки. Демодулятор 160 выполняет демодуляцию (например, для МОЧРК или МДЧРК-ЕН) на входных выборках, чтобы получить принимаемые символы. Демодулятор 160 передает принимаемые символы контрольных сигналов в канальный процессор 170 и передает принимаемые символы данных в устройство 172 обнаружения данных. Канальный процессор 170 выводит оценки канала для беспроводного канала между передатчиком 110 и приемником 150 и оценки шума и ошибок оценок, основываясь на принимаемых символах контрольных сигналов. Устройство 172 обнаружения данных выполняет обнаружение данных (например, выравнивание или согласованную фильтрацию) на принимаемых символах данных с помощью оценок канала и обеспечивает оценки символов данных, которые являются оценками символов данных, посылаемых передатчиком 110. ПРМ процессор 180 для обработки данных обрабатывает (например, выполняет посимвольное обратное преобразование, обратное перемежение и декодирование) оценок символов данных и обеспечивает декодированные данные. В общем, обработка в приемнике 150 является дополнительной к обработке в передатчике 110.
Контроллеры/процессоры 140 и 190 управляют функционированием различных устройств обработки данных в передатчике 110 и приемнике 150 соответственно. Запоминающие устройства 142 и 192 сохраняют коды программ и данные для передатчика 110 и приемника 150 соответственно.
Фиг. 2 изображает примерную структуру 200 поддиапазонов, которую можно использовать для системы 100. Система имеет полную ширину полосы пропускания системы BW МГц, которая разбита на множество (K) ортогональных поддиапазонов. K может быть любым целочисленным значением, но обычно представляет собой степень двух (например, 64, 128, 256, 512, 1024 и так далее) с целью упрощения преобразования между временными и частотными областями. Интервал между смежными поддиапазонами составляет BW/K МГц.
В спектрально-сформированной системе G поддиапазонов для передачи не используются и служат в качестве защитных поддиапазонов, чтобы обеспечивать возможность системе удовлетворять требованиям спектрального маскирования, где обычно G>1. G защитных поддиапазонов часто распределены так, что приблизительно G/2 защитных поддиапазонов находятся на нижнем краю полосы пропускания (которые называются нижними защитными поддиапазонами) и приблизительно G/2 защитных поддиапазонов находятся на верхнем краю полосы пропускания (которые называются верхними защитными поддиапазонами). Остающийся М поддиапазонов могут использоваться для передачи и называются полезными поддиапазонами, где М=K-G. Как используется в данном описании, поддиапазон данных представляет собой поддиапазон, используемый для передачи данных, а поддиапазон контрольных сигналов представляет собой поддиапазон, используемый для передачи контрольных сигналов. Некоторый данный поддиапазон может использоваться как поддиапазон контрольных сигналов в одном периоде символов и как поддиапазон данных в другом периоде символов.
Чтобы облегчать оценку канала, контрольный сигнал может передаваться в поддиапазонах, которые равномерно распределены по всей ширине полосы пропускания системы. Набор из N поддиапазонов может быть определен так, что последовательные поддиапазоны в наборе разнесены на расстояние S поддиапазонами, где K=S·N. Некоторые из поддиапазонов в этом наборе могут быть среди нижних защитных поддиапазонов и могут не использоваться для передачи контрольных сигналов, а некоторые другие поддиапазоны в наборе могут быть среди верхних защитных поддиапазонов и также могут не использоваться для передачи контрольных сигналов. Для примера, показанного на фиг. 2, первые L поддиапазонов в наборе для передачи контрольных сигналов не используются и называются обнуленными поддиапазонами контрольных сигналов, следующие P поддиапазонов в наборе используются для передачи контрольных сигналов и называются используемыми поддиапазонами контрольных сигналов, а последние U поддиапазонов в наборе представляют собой обнуленные поддиапазоны контрольных сигналов, где N=L+P+U.
Данные и контрольный сигнал могут пересылаться в полезных поддиапазонах с использованием МОЧРК или МДЧРК-ЕН. Символ МОЧРК можно генерировать следующим образом. На М полезных поддиапазонов могут быть отображены до М модуляционных символов, а нулевые символы со значением сигнала, составляющим нуль, отображаются на оставшиеся поддиапазоны. K-точечное обратное быстрое преобразование Фурье (ОБПФ) или K-точечное обратное дискретное преобразование Фурье (ОДПФ) выполняется на K модуляционных символах и нулевых символах, чтобы получить последовательность из K выборок временной области. Последние C выборок в последовательности копируются в начало последовательности, чтобы формировать символ МОЧРК, который содержит K+C выборок. C скопированных выборок часто называют циклическим префиксом или защитным интервалом, а C представляет собой продолжительность циклического префикса. Циклический префикс используется, чтобы бороться с межсимвольными помехами (МСП), вызываемыми частотным избирательным замиранием, которое является амплитудно-частотной характеристикой, изменяющейся по диапазону системы.
Символ МДЧРК-ЕН может быть образован следующим образом. T модуляционных символов, которые нужно переслать в T поддиапазонах, преобразуются в частотную область с помощью T-точечного быстрого преобразования Фурье (БПФ) или T-точечного дискретного преобразования Фурье (ДПФ), чтобы получить T символов частотных областей, где T может быть равно N и в общем Т≤М. T символов частотных областей отображаются на T поддиапазонов, используемых для передачи, а нулевые символы отображаются на K-T остающихся поддиапазонов. Затем K-точечное ОБПФ/ОДПФ выполняется на K символах частотной области и нулевых символах, чтобы получить последовательность из K выборок временной области. Последние C выборок в последовательности копируются в начало последовательности, чтобы формировать символ МДЧРК-ЕН, который содержит K+C выборок.
Передаваемый символ может быть символом МОЧРК или символом МДЧРК-ЕН. K+C выборок передаваемого символа передаются в K+C периодах выборок/элементарных посылок. Период символа представляет собой продолжительность одного передаваемого символа и равен K+C периодам выборок/элементарных посылок. В общем, передаваемый символ может содержать любую информацию (например, данные потока обмена информацией и/или контрольный сигнал) в любом количестве поддиапазонов и любом одном из полезных поддиапазонов.
Таблица показывает примерные значения для различных системных параметров, описанных выше. В общем, система может использовать любые значения для этих параметров.
Как отмечено выше, методы обработки приемника могут использоваться для различных систем связи и как для нисходящей линии связи, так и для восходящей линии связи. Для ясности, методы описаны ниже для системы, основанной на МОЧРК. В последующем описании векторы обозначены полужирным и подчеркнутым текстом с подстрочным индексом, указывающим размерность вектора, например h N для вектора N × 1 или H K для вектора K × 1, где член "× 1" подразумевается и опущен для ясности. Матрицы обозначены полужирным и подчеркнутым текстом с подстрочным индексом, указывающим размер матрицы, например W P×N для матрицы P × N. Векторы временной области в общем обозначаются с текстом из строчных букв (например, h K), а векторы частотной области в общем обозначаются текстом из прописных букв (например, H K).
Беспроводный канал между передатчиком 110 и приемником 150 может быть характеризован либо импульсной передаточной функцией канала временной области, либо соответствующей частотной характеристикой канала частотной области. Частотная характеристика канала представляет собой БПФ/ДПФ импульсной передаточной функции канала. Это отношение может быть выражено в матричной форме следующим образом:
где h K - вектор K × 1 для импульсной передаточной функции беспроводного канала;
H K - вектор K × 1 для частотной характеристики беспроводного канала;
W K×K - матрица Фурье K × K.
Матрица Фурье W K×K определена так, что элемент в n-й строке и m-м столбце задается как
Для простоты предполагается, что импульсная передаточная функция канала равна или короче, чем продолжительность циклического префикса. Это условие гарантирует, что K полных поддиапазонов являются ортогональными друг другу. Затем вектор временной области h K может быть определен как
где h C - вектор C × 1 для импульсной передаточной функции канала без избыточной задержки;
0 K-С - вектор (K-C) × 1, содержащий все нули.
Передатчик 110 передает символы данных и контрольных сигналов в полезных поддиапазонах к приемнику 150. Можно предположить, что символы данных и контрольных сигналов имеют среднюю энергию E s или E{|X(k)|2}=E s , где E{} обозначает операцию математического ожидания, а X(k) - символ, передаваемый в поддиапазоне k. Для простоты, в последующем описании предполагается, что каждый символ передается с единичной мощностью, так что E s=1.
Принимаемые символы, получаемые приемником 150, могут быть выражены как
где X K - вектор K × 1, содержащий передаваемые символы для K поддиапазонов;
Y K - вектор K × 1, содержащий принимаемые символы для K поддиапазонов;
η K - вектор K × 1 шума и радиопомех для K поддиапазонов;
"o" обозначает поэлементное произведение.
В уравнении (4) предполагается, что характеристика канала является постоянной в течение периода символа и что эффект Доплера является достаточно низким, так что нет никаких радиопомех между элементарными посылками (РМЭП). В уравнении (4) дополнительно предполагается, что импульсная передаточная функция канала короче, чем циклический префикс, так что нет никаких межсимвольных помех (МСП). Каждая компонента в X K может быть символом данных для поддиапазона данных, символом контрольного сигнала для поддиапазона контрольных сигналов или нулевым символом для неиспользуемого поддиапазона (например, защитного поддиапазона). Можно предположить, что символы данных являются независимыми с нулевым средним значением, так что ковариационную матрицу X K можно задавать как C XX=E{ X K · X K Н}= I K×K, где " Н " обозначает сопряженное транспонирование, а I K×K - единичную матрицу K × K. Можно предположить, что шум и радиопомехи являются аддитивным белым нормально распределенным шумом (АБНРШ) с нулевым средним вектором и ковариационной матрицей E{ η K · η K Н}=N 0 · I K×K, где N 0 - дисперсия шума. Каждая компонента η K является нулевой средней комплексной гауссовой случайной величиной с дисперсией N 0. Для простоты, шум и радиопомехи в последующем описании упоминаются просто как "шум".
Если все N поддиапазонов контрольных сигналов являются используемыми для передачи контрольных сигналов, то принимаемые символы контрольных сигналов могут быть выражены как
где X N - вектор N × 1, содержащий передаваемые символы контрольных сигналов;
Y N - вектор N × 1, содержащий принимаемые символы контрольных сигналов;
 - вектор N × 1 для дополняемой нулями импульсной передаточной функции канала;
- вектор N × 1 для дополняемой нулями импульсной передаточной функции канала;
η N - вектор N × 1 шума для N поддиапазонов контрольных сигналов.
Для простоты, второе равенство в уравнении (5) предполагает, что каждый из символов контрольных сигналов имеет комплексное значение 1+j0, а величина √E s=1. В этом случае, принимаемые символы контрольных сигналов представляют собой просто зашумленные версии коэффициентов усиления канала в H N, которые являются равными импульсной передаточной функции канала временной области h N, преобразованной в частотную область с помощью матрицы Фурье W N×N, как показано третьим равенством в уравнении (5).
Чтобы оценивать импульсную передаточную функцию канала, можно использовать различные методы, основанные на принимаемых символах контрольных сигналов. Эти методы включают в себя метод наименьших квадратов (НМК), метод минимальной среднеквадратической ошибки (МСКО), метод устойчивой МСКО, метод обращения в нуль незначащих коэффициентов (ОННК) и так далее.
Оценка импульсной передаточной функции канала методом наименьших квадратов ĥ N ls может быть получена как
где  Уравнение (6) указывает, что оценка импульсной передаточной функции канала методом наименьших квадратов может быть получена просто, если преобразовать N-точечное ОБПФ/ОДПФ принимаемых символов контрольных сигналов в
Y
N.
Уравнение (6) указывает, что оценка импульсной передаточной функции канала методом наименьших квадратов может быть получена просто, если преобразовать N-точечное ОБПФ/ОДПФ принимаемых символов контрольных сигналов в
Y
N.
Оценка импульсной передаточной функции канала МСКО ĥ N mmse может быть получена как

где Ψ hh=E{ h N · h N H} - автоковариация импульсной передаточной функции канала;
Λ ηη=E{ η N · η N H} - автоковариация шума для поддиапазонов контрольных сигналов.
Оценка устойчивой импульсной передаточной функции канала МСКО ĥ N rmmse может быть получена как
В уравнении (8) предполагается, что (а) отводы в импульсной передаточной функции канала являются некоррелированными и имеют равную мощность, так что Ψ hh= I N×N, и (b) шум η N представляет собой АБНРШ, так что Λ ηη=N0 · I N×N.
Методы обработки приемника, описанные в данном описании, можно использовать в комбинации с любым методом оценки канала. Для ясности, ниже описаны методы для метода наименьших квадратов и в предположении, что выводится оценка импульсной передаточной функции канала методом наименьших квадратов ĥ N ls. Верхний индекс "ls" в последующем описании опущен для ясности.
Полная оценка частотной характеристики канала Ĥ K для всех K полных поддиапазонов может быть получена посредством (1) дополнения нулями оценки импульсной передаточной функции канала методом наименьших квадратов до длины K и (2) преобразовывая K-точечное БПФ/ДПФ дополненной нулями оценки импульсной передаточной функции канала, следующим образом:
где  поскольку предполагается, что импульсная передаточная функция канала короче, чем циклический префикс.
поскольку предполагается, что импульсная передаточная функция канала короче, чем циклический префикс.
Если для передачи контрольных сигналов используются только P поддиапазонов контрольных сигналов, как показано на фиг. 2, то принимаемые символы контрольных сигналов для P используемых символов контрольных сигналов могут быть выражены как

где Y P - вектор P × 1 с принимаемыми символами контрольных сигналов для P используемых поддиапазонов контрольных сигналов;
W P×N - подматрица P × N для W N×N;
η Р - вектор P × 1 шума для P используемых поддиапазонов контрольных сигналов.
W P×N содержит P строк из W N×N, соответствующих P используемым поддиапазонам контрольных сигналов. Для примера, показанного на фиг. 2, W P×N содержит строки с L + 1 по N - U из W N×N.
Приемник 150 может заполнять обнуляемые поддиапазоны контрольных сигналов нулевыми символами, чтобы получить заполненный нулями N × 1 принимаемый вектор  который может быть выражен как
который может быть выражен как
Уравнение (11) может быть расширено следующим образом:
где  Ур. (13)
Ур. (13)

W L×N - матрица L × N, содержащая первые L строк из W N×N, соответствующие L заполненным нулями поддиапазонам контрольных сигналов на нижнем краю полосы пропускания;
W U×N - матрица U × N, содержащая последние U строк из W N×N, соответствующие U заполненным нулями поддиапазонам контрольных сигналов на верхнем краю полосы пропускания.
Вектор  включает в себя шум и ошибки оценки для N поддиапазонов для оценки методом наименьших квадратов (НМКЗо) заполненной нулями импульсной передаточной функции канала, которая является оценкой импульсной передаточной функции канала с использованием метода наименьших квадратов, полученной с помощью обнуления поддиапазонов контрольных сигналов, заполненных нулями. Вектор
ε
N включает в себя член смешивания, представленный НМКЗо, а матрица
Q
N×N является ответственной за это смешивание. В общем, Вектор
ε
N может быть различным для разных методов оценки канала, и специалисты в данной области техники могут вывести его для других методов оценки канала.
включает в себя шум и ошибки оценки для N поддиапазонов для оценки методом наименьших квадратов (НМКЗо) заполненной нулями импульсной передаточной функции канала, которая является оценкой импульсной передаточной функции канала с использованием метода наименьших квадратов, полученной с помощью обнуления поддиапазонов контрольных сигналов, заполненных нулями. Вектор
ε
N включает в себя член смешивания, представленный НМКЗо, а матрица
Q
N×N является ответственной за это смешивание. В общем, Вектор
ε
N может быть различным для разных методов оценки канала, и специалисты в данной области техники могут вывести его для других методов оценки канала.
Полная оценка частотной характеристики канала  для всех K полных поддиапазонов может быть получена посредством дополнения нулями вектора
для всех K полных поддиапазонов может быть получена посредством дополнения нулями вектора  до длины K и преобразовывая K-точечное БПФ/ДПФ дополненного нулями вектора, например, как показано в уравнении (9).
до длины K и преобразовывая K-точечное БПФ/ДПФ дополненного нулями вектора, например, как показано в уравнении (9).
Чтобы суммировать, принимаемые символы контрольных сигналов
Y
N без обнуленных поддиапазонов контрольных сигналов и принимаемые символы контрольных сигналов с обнуленными поддиапазонами контрольных сигналов могут быть заданы как
Уравнения (16) и (17) показывают, что разница между
Y
N и заключается в шумовых членах
η
N и .
Полная оценка частотной характеристики канала
Ĥ
K без обнуленных поддиапазонов контрольных сигналов и полная оценка частотной характеристики канала с обнуленными поддиапазонами контрольных сигналов могут быть заданы как
 и
и
Уравнения (18) и (19) показывают, что разница между
Ĥ
K и заключается в шумовых членах
η
K и  .
.
Уравнение (4) для принимаемых символов может быть перезаписано следующим образом:
где Z K - вектор K × 1, содержащий и шум η K, и ошибки оценки канала - Х K о η K.
Вектор Z K для шума и ошибок оценки может быть выражен как
где Z K channel - часть, связанная с каналом, Z K, и она может быть задана как
а Z K noise - часть, связанная с шумом, Z K, и она может быть задана как

Уравнение (22) разбивает
Z
K на часть
Z
K channel, связанную с каналом, и часть
Z
K noise, связанную с шумом. Уравнения (23) и (24) получены посредством замены во втором равенстве уравнения (22) выражениями, показанными в уравнениях (13)-(15), а затем разворачивая полученное в результате выражение. Части
Z
K channel и
Z
K noise не являются независимыми, поскольку они обе содержат
X
K. Часть
Z
K channel содержит ошибки оценки канала, обусловленные защитными поддиапазонами, а часть
Z
K noise содержит тепловой шум и шум, обусловленный ошибками оценки канала от защитных поддиапазонов. Уравнения (23) и (24) являются характерными для оценки импульсной передаточной функции канала методом наименьших квадратов. Часть, связанная с каналом, и часть, связанная с шумом, могут быть другими для других методов оценки канала.
Приемник 150 может восстанавливать передаваемые символы в X K, осуществляя обнаружение данных (например, выравнивание) на принимаемых символах в Y K следующим образом:
где U K - вектор K × 1, содержащий оценки символов данных, которые являются оценками передаваемых символов в X K;
 - вектор K × 1, содержащий возведенную в квадрат величину K коэффициентов усиления канала в ;
- вектор K × 1, содержащий возведенную в квадрат величину K коэффициентов усиления канала в ;
V
K =  о
Z
K - вектор K × 1 шума после детектирования.
о
Z
K - вектор K × 1 шума после детектирования.
Передатчик 110 обычно кодирует данные потока обмена информацией, основываясь на схеме кодирования (например, сверточном коде или Турбо коде), чтобы генерировать закодированные биты. Затем передатчик 110 перемежает закодированные биты и посимвольно отображает подвергнутые перемежению биты, чтобы генерировать символы данных. Каждый символ данных производится с помощью В битов, где В может быть равно 1 для ДФМП (двоичной фазовой манипуляции), 2 для КФМ (квадратурной фазовой модуляции), 3 для 8-ФМП (фазовой манипуляции с 8 значащими позициями амплитуды и фазы), 4 для 16-КАМ (квадратурной амплитудной модуляции с 16 значащими позициями амплитуды и фазы), и так далее.
Приемник 150 выполняет обнаружение данных, чтобы получить вектор
U
K, содержащий оценки символов данных для поддиапазонов данных. Приемник 150 обычно вычисляет логарифмические отношения правдоподобия (ЛОП) для битов, которые формируют символы данных. ЛОП для каждого бита указывает вероятность того, что этот бит является единицей ('1') или нулем ('0'). Отношения ЛОП могут быть получены на основании условных вероятностей prob(
Y
K|
X
K, ), которые означают вероятность приема
Y
K данных
X
K и . Точное выражение для условных вероятностей является сложным. Выражение можно упростить, аппроксимируя
Z
K как АБНРШ. Ковариационная матрица для
Z
K может использоваться затем для вычисления отношений ЛОП для символов данных.
Ковариационная матрица для Z K, C ZZ, может быть выражена как

Z K может быть разбит на часть Z K channel, связанную с каналом, и часть Z K noise, связанную с шумом, как показано в уравнениях (22)-(24). Ковариация Z K channel может быть обозначена как C ZZ channel , а ковариация Z K noise может быть обозначена как C ZZ noise . Чтобы получить верхнюю границу на ковариации суммы Z K channel и Z K noise, эти два вектора могут быть обработаны как независимые векторы, ковариационные матрицы Z K channel и Z K noise могут быть определены, и эти две ковариационные матрицы могут быть суммированы.
Для части Z K channel, связанной с каналом, может быть сделано предположение, что все отводы импульсной передаточной функции канала являются независимо и тождественно распределенными (i.i.d.) Релеевскими, умноженными на скалярную величину, задаваемую профилем мощности для канала. Профиль мощности канала является показательным для долгосрочной усредненной во времени энергии отводов канала в импульсной передаточной функции для беспроводного канала. С вышеупомянутым предположением, среднее значение всех компонентов в Z K channel является нулевым, с математическим ожиданием, которое берется по различным реализациям каналов и передаваемым символам.
Главную диагональ C ZZ channel для поддиапазонов данных можно задавать как

где  и
и
R hh = E{ h K · h K H} - автоковариация импульсной передаточной функции канала.
R hh является диагональной матрицей K × K, если отводы канала являются независимыми. Диагональные компоненты R hh задаются профилем мощности канала. R hh может быть получена на основании долгосрочного среднего значения внешнего векторного произведения ĥ K · ĥ K H. В качестве альтернативы, можно предположить, что отводы канала имеют равную мощность и каждая из C крайних левых диагональных компонент R hh может быть установлена равной 1/C, чтобы сделать полный коэффициент усиления по мощности для беспроводного канала равным единице. В уравнении (27) при вычислении Φ · R h 1/2 перемножений больших матриц можно избегать, поскольку умножение на W K×K может быть выполнено с помощью K-точечного БПФ/ДПФ, а умножение на W -1 N×N может быть выполнено с помощью N-точечного ОБПФ/ОДПФ.
Для части Z K noise, связанной с шумом, шумовой вектор η N для N поддиапазонов контрольных сигналов может быть задан как

где I N×K - матрица N × K, содержащая N единиц в N строках, с этими N единицами, находящимися в N столбцах, соответствующих N поддиапазонам контрольных сигналов. Матрица Θ K×K может быть определена как
Затем уравнение (24) может быть перезаписано следующим образом:

Уравнение (30) указывает, что Z K noise представляет собой произведение двух независимых случайных величин - случайной матрицы ( I K×K - X K о Θ K×K) и случайного Гауссова вектора η K. Уравнение (30) может быть откорректировано для того, чтобы учитывать подавление шума, обусловленное временной фильтрацией. Например, уравнение (30) может быть откорректировано посредством суммы квадратов коэффициентов временной фильтрации. В качестве примера, матрица Θ K×K может быть умножена на скалярную величину, которая зависит от коэффициентов временной фильтрации.
Предполагается, что шум η K является АБНРШ с нулевым средним значением вектора E{ η K} = 0 K и ковариацией E{ η K · η K Н} = N 0 · I N×K. Тогда часть Z K noise, связанная с шумом, имеет нулевое среднее значение, или E{ Z K noise} = 0 K, и ковариацию C ZZ noise, которая может быть выражена как

В уравнении (31) первое равенство может быть расширено, чтобы получить четыре промежуточных члена. Два из этих промежуточных членов,  и
и  равны нулю из-за умножения на
X
K.
C
ZZ noise содержит два остающихся промежуточных члена.
равны нулю из-за умножения на
X
K.
C
ZZ noise содержит два остающихся промежуточных члена.
Матрица Θ K×K может быть записана в виде ее строк как
где θ k , для k = 1,...,K, является вектором l × K строк для k-й строки матрицы Θ K×K. Ковариация Z K noise может быть тогда выражена как

Уравнения (15) и (29)-(33) показывают, что для методики оценки канала методом наименьших квадратов ковариация части, связанной с шумом, C ZZ noise, является зависящей исключительно от структуры поддиапазонов, которая определена
Θ K×K и B N×N.
Ковариационная матрица Z K может тогда быть выражена как
где C ZZ channel и C ZZ noise могут быть выведены, как описано выше для уравнений (27) и (31) соответственно. C ZZ представляет собой диагональную матрицу K × K, содержащую дисперсию шума и ошибок оценки для K полных поддиапазонов. k-й диагональный элемент матрицы C ZZ представляет собой оценку шума и ошибки оценки для поддиапазона k. Оценки шума и ошибок оценок могут использоваться для вычисления отношений ЛОП для символов данных, принимаемых в поддиапазонах данных.
Принимаемый символ данных для каждого поддиапазона данных k может быть выражен как
где X(k) - передаваемый символ данных для поддиапазона k;
Y(k) - принимаемый символ данных для поддиапазона k;
Н(k) - комплексный коэффициент усиления канала для поддиапазона k;
N(k) - шум для поддиапазона k.
Приемник может выполнять выявление данных для каждого поддиапазона k следующим образом:
где  - коэффициент усиления канала для поддиапазона k, который является k-м элементом матрицы ;
- коэффициент усиления канала для поддиапазона k, который является k-м элементом матрицы ;
U(k) - оценка символа данных для поддиапазона k, которая является оценкой X(k).
Символ данных X(k) определяется В битами и соответствует одной из 2B возможных точек в совокупности сигнала. Приемник может вычислять ЛОП для каждого из В битов символа данных X(k) следующим образом:
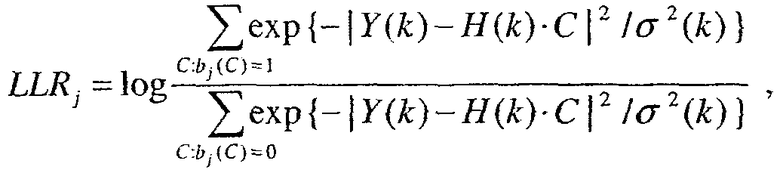
где LLRj - ЛОП для j-го бита символа данных X(k);
C - один из 2B возможных модуляционных символов для совокупности сигналов;
b j(C) = 1 означает, что C имеет '1' для j-го бита;
b j(C) = 0 означает, что C имеет '0' для j-го бита;
σ2(k) - дисперсия шума в N(k).
В уравнении (37) суммирование в числителе производится по всем модуляционным символам, имеющим '1' для j-го бита, а суммирование в знаменателе производится по всем модуляционным символам, имеющим '0' для j-го бита. Каждый из 2B возможных модуляционных символов таким образом учитывается либо в числителе, либо в знаменателе. Для каждого модуляционного C символа оценку принимаемого символа получают как Н(k) · C(k) и вычитают из принимаемого символа данных Y(k), а полученную в результате ошибку делят на шумовую дисперсию σ2(k). k-й диагональный элемент матрицы C ZZ может использоваться для σ2(k). Отношения ЛОП, вычисленные для принимаемых символов данных, могут быть декодированы способом, известным в технике.
Фиг. 3 изображает блок-схему варианта осуществления ПРМ процессора 180 для обработки данных в приемнике 150. В ПРМ процессоре 180 для обработки данных модуль 310 вычисления ЛОП принимает (1) оценки символов данных
U
K от устройства 172 обнаружения данных и (2) оценки канала и оценки шума и ошибок оценок,
C
ZZ, от канального процессора 170. Модуль 310 вычисляет отношения ЛОП для закодированных битов каждой оценки символа данных на основании принимаемых величин, например, как показано в уравнении (37). Обращенный перемежитель 312 выполняет обратное перемежение отношений ЛОП от модуля 310 способом, дополнительным к перемежению, выполняемому передатчиком 110, и обеспечивает подвергнутые обратному перемежению отношения ЛОП. Декодер 314 декодирует подвергнутые обратному перемежению отношения ЛОП, основываясь на схеме кодирования, используемой передатчиком 110, и обеспечивает декодированные данные.
Устройство 172 обнаружения данных и декодер 314 могут выполнять итерационное обнаружение и декодирование для множества итераций, чтобы улучшить эффективность. Для каждой итерации декодер 314 обеспечивает декодированные отношения ЛОП, которые перемежаются перемежителем 322 и передаются в устройство 172 обнаружения данных. Устройство 172 обнаружения данных выводит новые оценки символов данных, основываясь на принимаемых символах данных, оценках канала и декодированных отношениях ЛОП. Новые оценки символов данных используются для вычисления новых отношений ЛОП, которые снова декодируются декодером 314. Надежность оценок символов данных улучшается с каждой итерацией обнаружения/декодирования. После того как все итерации закончены, декодер 314 отслаивает заключительные отношения ЛОП, чтобы получить декодированные данные.
Канальный процессор 170 и декодер 314 также могут выполнять итеративное оценивание канала и шума и декодирование для множества итераций. Для каждой итерации декодер 314 обеспечивает декодированные отношения ЛОП для канального процессора 170, который выводит новые оценки канала и/или новые оценки шума и ошибок оценок, основываясь на принимаемых символах контрольных сигналов и декодированных отношениях ЛОП. Новые оценки канала могут использоваться для обнаружения данных, и новые оценки канала и/или новые оценки шума и ошибок оценок могут использоваться для вычисления новых отношений ЛОП.
Фиг. 4 изображает процесс 400, выполняемый приемником 150 для восстановления передаваемых данных, посылаемых передатчиком 110. Приемник 150 получает принимаемые символы контрольных сигналов для поддиапазонов контрольных сигналов и принимаемые символы данных для поддиапазонов данных (блок 412). Принимаемые символы контрольных сигналов и принимаемые символы данных могут быть получены посредством выполнения демодуляции (например, для МОЧРК или МДЧРК-ЕН) на входных выборках от приемной антенны.
Оценки канала выводятся на основании принимаемых символов контрольных сигналов с обнуленными поддиапазонами контрольных сигналов, заполненными нулями (блок 414). Оценка канала может быть выполнена с использованием различных методов оценки канала, как описано выше. Обнаружение данных выполняется на принимаемых символах данных с помощью оценок канала для выведения оценок символов данных (блок 416). Выводятся оценки шума и ошибок оценок, обусловленные обнуленными поддиапазонами контрольных сигналов (блок 418). Это может быть достигнуто посредством выведения первой ковариационной матрицы
C
ZZ channel для связанной с каналом части шума и ошибок оценок, выведения второй ковариационной матрицы
C
ZZ noise для связанной с шумом части шума и ошибок оценок и выведения ковариационной матрицы
C
ZZ для полного шума и ошибок оценок, основанной на первой и второй ковариационных матрицах. Для методики оценки канала методом наименьших квадратов первая ковариационная матрица может быть выведена на основании оценки импульсной передаточной функции канала, а вторая ковариационная матрица может быть выведена на основании структуры поддиапазона, используемой для передачи, как описано выше. В общем, оценки шума и ошибок оценок могут быть вычислены явным или неявным образом.
Затем вычисляются отношения ЛОП на основании оценок символов данных, оценок канала и оценок шума и ошибок оценок, которые содержатся в ковариационной матрице C ZZ (блок 420). Отношения ЛОП подвергаются обратному перемежению и декодированию, чтобы получить декодированные данные для приемника 150 (блок 422).
С помощью методов, описанных в данном описании, можно вычислять отношения ЛОП способом, учитывающим шум и ошибки оценок, обусловленные обнуленными поддиапазонами контрольных сигналов, что может улучшать эффективность. Обнуленные поддиапазоны контрольных сигналов обычно оказывают неблагоприятное воздействие на шум и оценку канала и приводят к ошибкам оценки. Можно выводить дисперсию шума и ошибок оценок и использовать для вычисления отношений ЛОП, как описано выше. Компьютерные моделирования показывают, что может быть достигнут коэффициент усиления, превышающий 1 децибел (дБ) для описываемой системы МОЧРК, приведенной выше в таблице, при частоте ошибок в кадрах (ЧОК), составляющей 1%.
Специалистам в данной области техники должно быть понятно, что информация и сигналы могут быть представлены с использованием любой из ряда различных технологий и методов. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные посылки, которые могут упоминаться по всему приведенному выше описанию, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами, или любой их комбинацией.
Специалисты в данной области техники дополнительно могут оценить, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритма, описанные в связи с раскрытыми в данном описании вариантами осуществления, могут быть реализованы как электронные аппаратные средства, встроенные программы, программное обеспечение или их комбинации. Чтобы ясно проиллюстрировать эту взаимозаменяемость аппаратных средств, встроенных программ и программного обеспечения, различные иллюстративные компоненты, блоки, модули, схемы и этапы были описаны выше в общем в терминах их функциональных возможностей. Реализованы ли такие функциональные возможности в виде аппаратных средств, встроенных программ и/или программного обеспечения, это зависит от конкретного применения и конструктивных ограничений, накладываемых на всю систему. Специалисты в данной области техники могут реализовывать описанные функциональные возможности различными способами для каждого конкретного применения, но такие решения воплощений не должны интерпретироваться как вызывающие отклонение от объема настоящего изобретения.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с раскрытыми в данном описании вариантами осуществления, могут быть реализованы или выполнены с помощью универсального процессора, процессора цифровой обработки сигналов (ПЦОС), интегральной схемы прикладной ориентации (ИСПО), программируемой пользователем вентильной матрицы (ППВМ) или другого программируемого логического устройства (ПЛУ), дискретного логического элемента или транзисторной логической схемы, дискретных компонентов аппаратного обеспечения, или любой их комбинации, предназначенной для выполнения функций, описанных в данном описании. Универсальным процессором может быть микропроцессор, но в качестве альтернативы, процессором может быть любой обычный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть реализован в виде комбинации вычислительных устройств, например комбинации ПЦОС и микропроцессора, множества микропроцессоров, одного или больше микропроцессоров вместе с ядром ПЦОС, или любой другой такой конфигурации.
Этапы метода или алгоритма, описанные в связи с раскрытыми в данном описании вариантами осуществления, могут быть воплощены непосредственно в аппаратных средствах, в модуле встроенных программ/программного обеспечения, выполняемом процессором, или в комбинации и того, и другого. Модуль встроенных программ/программного обеспечения может постоянно находиться в памяти ОЗУ (оперативного запоминающего устройства), флэш-памяти, памяти ПЗУ (постоянного запоминающего устройства), памяти ППЗУ (программируемого ПЗУ), памяти ЭСППЗУ (электрически стираемого ППЗУ), регистрах, жестком диске, съемном диске, CD-ROM (неперезаписываемом компакт-диске) или любой другой форме носителя записи, известной в технике. Примерный носитель записи подсоединен к процессору так, что процессор может считывать информацию с этого носителя записи и записывать на него информацию. В качестве альтернативы, носитель записи может быть выполнен за одно целое с процессором. Процессор и носитель записи могут постоянно находиться в ИСПО. ИСПО может постоянно находиться в терминале пользователя. В качестве альтернативы, процессор и носитель записи могут постоянно находиться как дискретные компоненты в терминале пользователя.
Предыдущее описание раскрытых вариантов осуществления обеспечено для того, чтобы дать возможность любому специалисту в данной области техники выполнять или использовать настоящее изобретение. Различные модификации к этим вариантам осуществления специалистам в данной области техники будут очевидны, а универсальные принципы, определенные в данном описании, можно применять к другим вариантам осуществления, не выходя при этом за рамки сущности или объема изобретения. Таким образом, настоящее изобретение не предназначено для ограничения вариантами осуществления, показанными в данном описании, но должно соответствовать самому широкому объему, совместимому с принципами и новыми признаками, раскрытыми в данном описании.
Изобретение относится к методам выполнения обнаружения и декодирования данных способом, учитывающим защитные поддиапазоны. Приемник принимает символы контрольных сигналов для поддиапазонов контрольных сигналов и принимает символы данных для поддиапазонов данных. Выводятся оценки канала на основании принимаемых символов контрольных сигналов с обнуленными поддиапазонами контрольных сигналов, заполненными нулями. Обнаружение данных выполняется на принимаемых символах данных с помощью оценок канала для получения оценок символов данных. Выводятся оценки шума и ошибок оценок, обусловленные обнуленными поддиапазонами контрольных сигналов. Затем вычисляются отношения ЛОП на основании оценок символов данных, оценок канала и оценок шума и ошибок оценок. Отношения ЛОП подвергаются обратному перемежению и декодированию для получения декодированных данных. 4 н. и 19 з.п. ф-лы, 4 ил., 1 табл.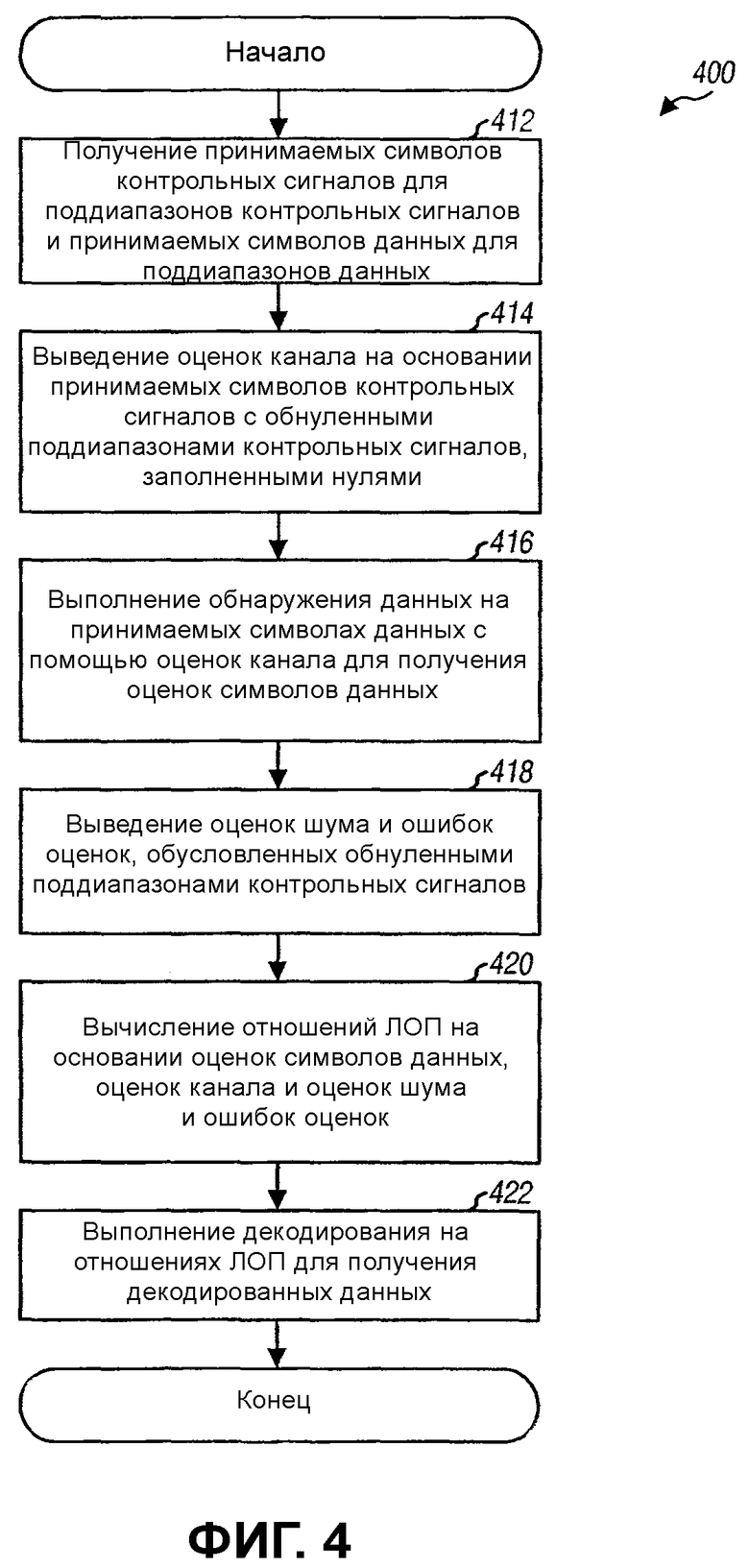
1. Устройство обработки данных, содержащее
по меньшей мере один процессор, сконфигурированный для выведения оценок шума и ошибок оценок канала, обусловленных, по меньшей мере, одним поддиапазоном контрольных сигналов, заполняемым нулями и не используемым для передачи контрольных сигналов, и для вычисления логарифмических отношений правдоподобия (ЛОП) битов символов данных с использованием оценок символов данных, оценок канала, оценок шума и ошибок оценок канала, и
запоминающее устройство, оперативно подсоединенное, по меньшей мере, к одному процессору.
2. Устройство по п.1, в котором, по меньшей мере, один процессор сконфигурирован для выведения упомянутых оценок канала на основании принимаемых символов контрольных сигналов.
3. Устройство по п.1, в котором, по меньшей мере, один процессор сконфигурирован для выведения упомянутых оценок канала на основании принимаемых символов контрольных сигналов, выполнения обнаружения данных на принимаемых символах данных с помощью оценок канала для получения оценок символов данных.
4. Устройство по п.2, в котором, по меньшей мере, один процессор сконфигурирован для получения принимаемых символов контрольных сигналов из множества поддиапазонов контрольных сигналов, равномерно распределенных по ширине полосы пропускания системы и включающих в себя по меньшей мере один обнуленный поддиапазон контрольных сигналов.
5. Устройство по п.2, в котором, по меньшей мере, один процессор сконфигурирован для выведения оценок канала, заменяя нулем по меньшей мере один принятый символ по меньшей мере для одного обнуленного поддиапазона контрольных сигналов.
6. Устройство по п.2, в котором, по меньшей мере, один процессор сконфигурирован для выведения оценок канала на основании методики оценки канала методом наименьших квадратов.
7. Устройство по п.2, в котором, по меньшей мере, один процессор сконфигурирован для выведения оценок канала на основании метода минимальной среднеквадратической ошибки (МСКО), метода оценки канала устойчивой МСКО или метода оценки канала обращения в нуль незначащих коэффициентов (ОННК).
8. Устройство по п.1, в котором, по меньшей мере, один процессор сконфигурирован для выведения оценок канала на основании метода оценки канала, выведения оценок шума и ошибок оценок канала на основании метода оценки канала, и вычисления отношений ЛОП с использованием оценок канала и оценок шума и ошибок оценок канала.
9. Устройство по п.1, в котором, по меньшей мере, один процессор сконфигурирован для выведения связанной с каналом части шума и ошибок оценок канала, выведения связанной с шумом части шума и ошибок оценок канала, и выведения оценок шума и ошибок оценок канала на основании части, связанной с каналом, и части, связанной с шумом.
10. Устройство по п.1, в котором, по меньшей мере, один процессор сконфигурирован для выведения первой ковариационной матрицы, основанной на оценке импульсной передаточной функции канала, выведения второй ковариационной матрицы, основанной на структуре поддиапазонов, используемой для передачи, выведения третьей ковариационной матрицы для шума и ошибок оценок канала, основанной на первой и второй ковариационных матрицах, и вычисления отношений ЛОП с использованием третьей ковариационной матрицы.
11. Устройство по п.1, в котором, по меньшей мере, один процессор сконфигурирован для выполнения декодирования на отношениях ЛОП, чтобы получать декодированные данные.
12. Устройство по п.1, в котором, по меньшей мере, один процессор сконфигурирован для выполнения демодуляции для мультиплексирования с ортогональным частотным разделением каналов (МОЧРК), чтобы получать принимаемые символы контрольных сигналов для поддиапазонов, используемых для передачи контрольных сигналов, и принимаемые символы данных для поддиапазонов, используемых для передачи данных.
13. Устройство по п.1, в котором, по меньшей мере, один процессор сконфигурирован для выполнения демодуляции для множественного доступа с частотным разделением с единственной несущей (МДЧРК-ЕН), чтобы получать принимаемые символы контрольных сигналов для поддиапазонов, используемых для передачи контрольных сигналов, и принимаемые символы данных для поддиапазонов, используемых для передачи данных.
14. Устройство обработки данных, содержащее
по меньшей мере, один процессор, сконфигурированный для получения принимаемых символов контрольных сигналов для множества поддиапазонов контрольных сигналов и принимаемых символов данных для множества поддиапазонов данных, для выведения оценок канала на основании принимаемых символов контрольных сигналов и, по меньшей мере, одного нуля, по меньшей мере, для одного обнуленного поддиапазона контрольных сигналов, не используемого для передачи контрольных сигналов, для выполнения обнаружения данных на принимаемых символах данных с помощью оценок канала для получения оценок символов данных, для выведения оценок шума и ошибок оценок канала, обусловленных, по меньшей мере, одним обнуленным поддиапазоном контрольных сигналов, и для вычисления логарифмических отношений правдоподобия (ЛОП) битов символов данных, основываясь на оценках символов данных, оценках канала, и оценках шума и ошибок оценок канала, и
запоминающее устройство, оперативно подсоединенное, по меньшей мере, к одному процессору.
15. Устройство по п.14, в котором, по меньшей мере, один процессор сконфигурирован для выведения оценок канала на основании метода оценки канала, выведения оценок шума и ошибок оценок канала на основании метода оценки канала, и вычисления отношений ЛОП с использованием оценок канала и оценок шума и ошибок оценок канала.
16. Способ обработки данных содержащий
выведение оценок шума и ошибок оценок канала, обусловленных, по меньшей мере, одним поддиапазоном контрольных сигналов, заполняемым нулями и не используемым для передачи контрольных сигналов, и
вычисление логарифмических отношений правдоподобия (ЛОП) битов символов данных с использованием оценок символов данных, оценок канала, и оценок шума и ошибок оценок канала.
17. Способ по п.16, дополнительно содержащий выведение оценок канала на основании принимаемых символов контрольных сигналов, и в котором отношения ЛОП вычисляются с использованием оценок канала и оценок шума и ошибок оценок канала.
18. Способ по п.16, в котором выведение оценок канала содержит выведение оценок канала посредством замены нулем, по меньшей мере, одного принятого символа, по меньшей мере, для одного обнуленного поддиапазона контрольных сигналов.
19. Способ по п.16, дополнительно содержащий выведение оценок канала на основании метода оценки канала, в котором оценки шума и ошибок оценок канала выводятся на основании метода оценки канала, и в котором отношения ЛОП вычисляются с использованием оценок канала и оценок шума и ошибок оценок канала.
20. Устройство обработки данных, содержащее
средство для выведения оценок шума и ошибок оценок канала, обусловленных, по меньшей мере, одним поддиапазоном контрольных сигналов, заполняемым нулями и не используемым для передачи контрольных сигналов, и
средство для вычисления логарифмических отношений правдоподобия (ЛОП) битов символов данных с использованием оценок символов данных, оценок канала, и оценок шума и ошибок оценок канала.
21. Устройство по п.20, дополнительно содержащее средство для выведения оценок канала на основании принимаемых символов контрольных сигналов, и в котором средство для вычисления отношений ЛОП содержит средство для вычисления отношений ЛОП с использованием оценок канала и оценок шума и ошибок оценок канала.
22. Устройство по п.20, в котором средство для выведения оценок канала содержит средство для выведения оценок канала посредством замены нулем по меньшей мере одного принятого символа по меньшей мере для одного обнуленного поддиапазона контрольных сигналов.
23. Устройство по п.20, дополнительно содержащее средство для выведения оценок канала на основании метода оценки канала, и в котором средство для выведения оценок шума и ошибок оценок канала содержит средство для выведения оценок шума и ошибок оценок канала на основании метода оценки канала, и в котором средство для вычисления отношений ЛОП содержит средство для вычисления отношений ЛОП с использованием оценок канала и оценок шума и ошибок оценок канала.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СЛУЧАЙНЫЙ ДОСТУП В МОБИЛЬНОЙ СИСТЕМЕ СВЯЗИ | 1999 |
|
RU2227372C2 |
| СПОСОБ КОГЕРЕНТНОЙ РАЗНЕСЕННОЙ ПЕРЕДАЧИ СИГНАЛА | 2001 |
|
RU2192094C1 |
| US 6442130 B1, 27.08.2002 | |||
| US 6661832 B1, 09.12.2003 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

