Изобретение относится к механическим устройствам для импульсного передвижения за счет сил, возникающих при контакте с опорой.
Известны инерционные движители для импульсного передвижения при циклических изменениях центробежных сил инерции механизма, при движении размещенных в устройстве рычагов с дисбалансными грузами, движущимися по замкнутой траектории - кардиоиде. При этом поступательное движение устройства складывается из импульсных разноскоростных движений устройства ”вперед-назад” относительно опоры за счет переменных сил трения между устройством и опорой, с которой устройство находится в контакте (Заявка РФ №95119231, 1997 г., Официальный бюллетень РФ №32, 1997 г.).
Более близким из аналогов по конструктивным признакам к заявленному устройству является инерционный движитель, описанный в журнале «Техника-молодежи», 1969 г., стр.19, в статье «А была ли сенсация?».
Указанный движитель содержит два соосных вала, на каждом валу закреплен одноплечий рычаг с размещенным на его конце грузом. При работе устройства рычаги вращаются в противоположные стороны, при этом каждый рычаг вращается в одну сторону с плавно изменяющейся угловой скоростью на каждом обороте.
Задачей заявленного изобретения является расширение арсенала механических устройств с импульсным передвижением за счет сил, возникающих при контакте с опорой.
Транспортное устройство включает корпус с приводом вращения и по меньшей мере два рабочих вала, на каждом из которых закреплен рычаг с по меньшей мере одним грузом большей массы, при этом в отличие от аналогов каждый рычаг снабжен грузом меньшей массы и выполнен в виде двуплечей относительно центра масс и вала траверсы с коротким и длинным плечами, причем груз большей массы размещен на коротком плече траверсы, а груз меньшей массы размещен на длинном плече, по меньшей мере груз большей массы выполнен как груз-ротор, который сопряжен с двигателем траверсы и установлен на оси, расположенной поперек продольной оси траверсы, груз-ротор кинематически связан с траверсой зубчатой передачей с возможностью реверсивного вращения траверсы и груза-ротора относительно друг друга, привод корпуса кинематически связан с валами траверс, посредством по меньшей мере одной трансмиссии с возможностью вращения каждой траверсы.
При этом трансмиссии могут быть выполнены в виде кривошипно-шатунного механизма, где на валу привода корпуса закреплен кривошип с установленным на нем шатуном, который соединен с зубчатой рейкой, зацепленной с некруглым зубчатым колесом вала траверсы, эксцентриситет кривошипа вала привода корпуса составляет 0,25-0,5 длины начальной кривой некруглого зубчатого колеса вала траверсы, а зубчатая рейка выполнена в виде ползуна с криволинейной начальной линией зубьев рейки.
При этом трансмиссии также могут быть выполнены в виде зубчатой передачи, где на валу привода корпуса закреплено некруглое зубчатое колесо, которое зацеплено с некруглым зубчатым колесом вала траверсы.
Транспортное устройство по второму варианту включает корпус, на котором шарнирно установлен рычаг с размещенным на нем по меньшей мере одним грузом большей массы, при этом в отличие от аналогов рычаг снабжен грузом меньшей массы и выполнен в виде траверсы, имеющей короткое плечо и длинное плечо относительно оси вращения, при этом на коротком плече размещен груз большей массы, на длинном плече размещен груз меньшей массы, при этом больший груз выполнен как груз-ротор и установлен на оси, расположенной поперек продольной оси траверсы, причем груз-ротор выполнен как вращающийся на оси энергетический блок с силовым приводом вращения и системой управления, обеспечивающими реверсивное вращение траверсы и груза-ротора относительно друг друга.
Способ передвижения транспортного устройства, содержащего две траверсы, включает вращательные движения двух траверс в противоположные стороны, при этом каждой траверсе придают неполнооборотные реверсивные вращательные движения с переменной угловой скоростью в пределах дуги 350°, при движении грузов по первой части дуги траверсу вращают с увеличением ее угловой скорости, при движении грузов по средней части дуги траверсу вращают с равномерной максимальной угловой скоростью, при движении грузов по последней части дуги траверсу вращают с уменьшением угловой скорости до полной остановки вращения, а затем траверсу вращают в другую сторону в том же режиме.
Второй способ передвижения транспортного устройства, содержащего две траверсы, включает вращательные движения двух траверс в противоположные стороны с одинаковой угловой скоростью при вращении каждой траверсы в одну сторону с переменной угловой скоростью, при вращении каждой траверсы и движении грузов по первой части окружности траверсу вращают с увеличением ее угловой скорости, при движении грузов по второй части окружности траверсу вращают с равномерной максимальной угловой скоростью, при движении грузов по третьей части окружности траверсу вращают с уменьшением угловой скорости, при движении грузов по последней части окружности траверсу вращают с равномерной минимальной угловой скоростью, а на следующем обороте траверсу вращают в ту же сторону в том же режиме.
Способ передвижения транспортного устройства, содержащего одну траверсу, включает вращение траверсы с переменной угловой скоростью, при этом траверсе придают неполнооборотные реверсивные вращательные движения с переменной угловой скоростью в пределах дуги 350°, при движении грузов по первой части дуги траверсу вращают с увеличением ее угловой скорости, при движении грузов по средней части дуги траверсу вращают с равномерной максимальной угловой скоростью, при движении грузов по последней части дуги траверсу вращают с уменьшением угловой скорости до полной остановки вращения, а затем траверсу вращают в другую сторону в том же режиме.
Второй способ передвижения транспортного устройства, содержащего одну траверсу, включает вращение траверсы в одну сторону с переменной угловой скоростью в пределах оборота, при этом при вращении траверсы и движении грузов по первой части окружности траверсу вращают с увеличением ее угловой скорости, при движении грузов по второй части окружности траверсу вращают с равномерной максимальной угловой скоростью, при движении грузов по третьей части окружности траверсу вращают с уменьшением угловой скорости, при движении грузов по последней части окружности траверсу вращают с равномерной минимальной угловой скоростью, а на следующем обороте траверсу вращают в ту же сторону в том же режиме.
В процессе указанных вращательных движений траверса при ее равномерной угловой скорости вращается вокруг центра масс траверсы, а при угловом ускорении и угловом торможении траверса вращается вокруг мгновенных осей, смещенных от центра масс траверсы.
Таким образом в связи с асимметрией каждой траверсы по длине ее плеч и массам размещенных на них грузов моменты инерции противоположных плеч траверсы оказываются разными по величине, вследствие чего при угловом ускорении и угловом торможении траверсы на ее центр масс циклически действуют боковые силы, в результате чего при контакте устройства с опорой возникают переменные силы трения, под действием которых устройство передвигается в заданном направлении.
На фиг.1 показана конструктивная схема модели устройства с двумя траверсами, на меньшем плече каждой траверсы установлен груз-ротор.
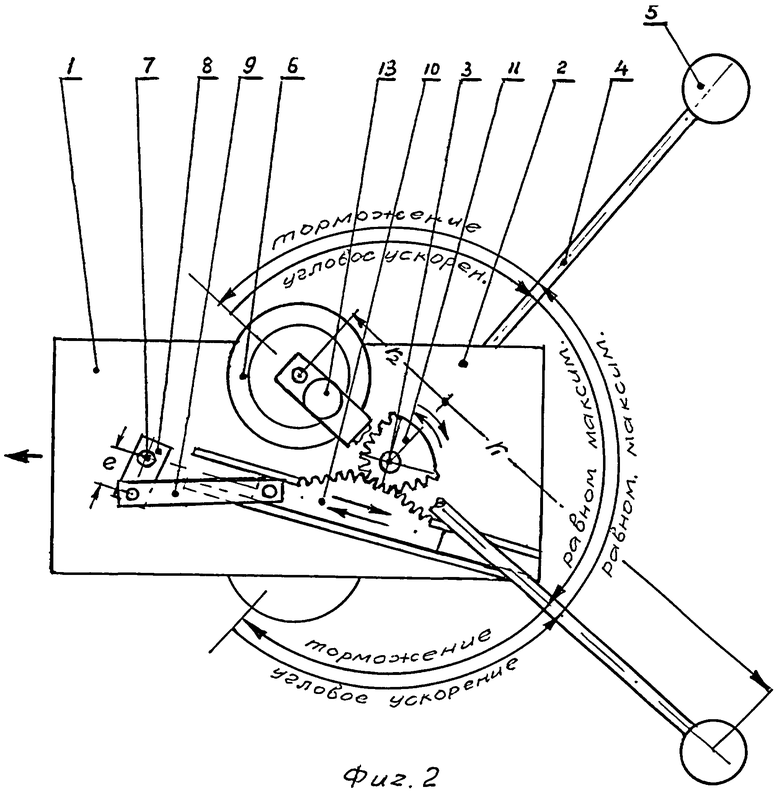
На фиг.2 - общий вид устройства в плоскости вращения траверс.
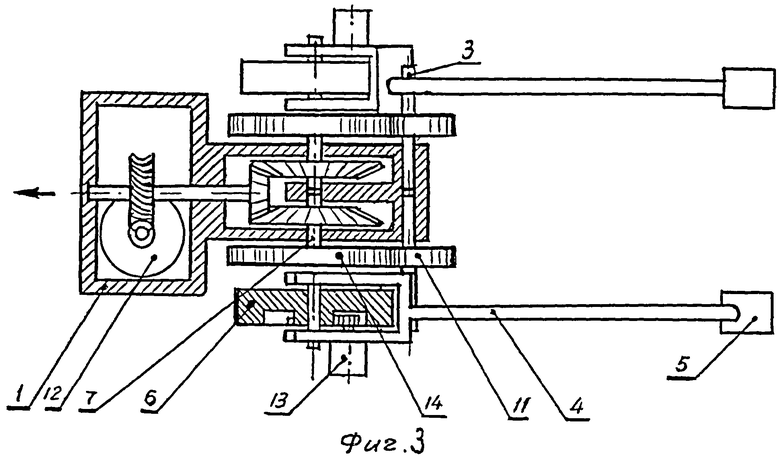
На фиг.3 - конструктивная схема модели устройства с односторонним вращением траверс.
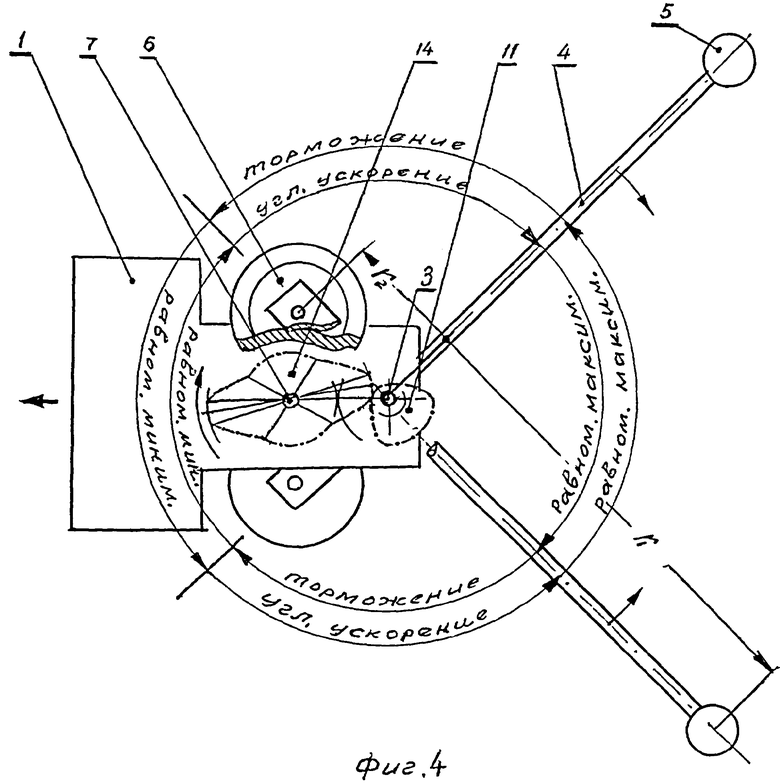
На фиг.4 - общий вид устройства в плоскости вращения траверс.
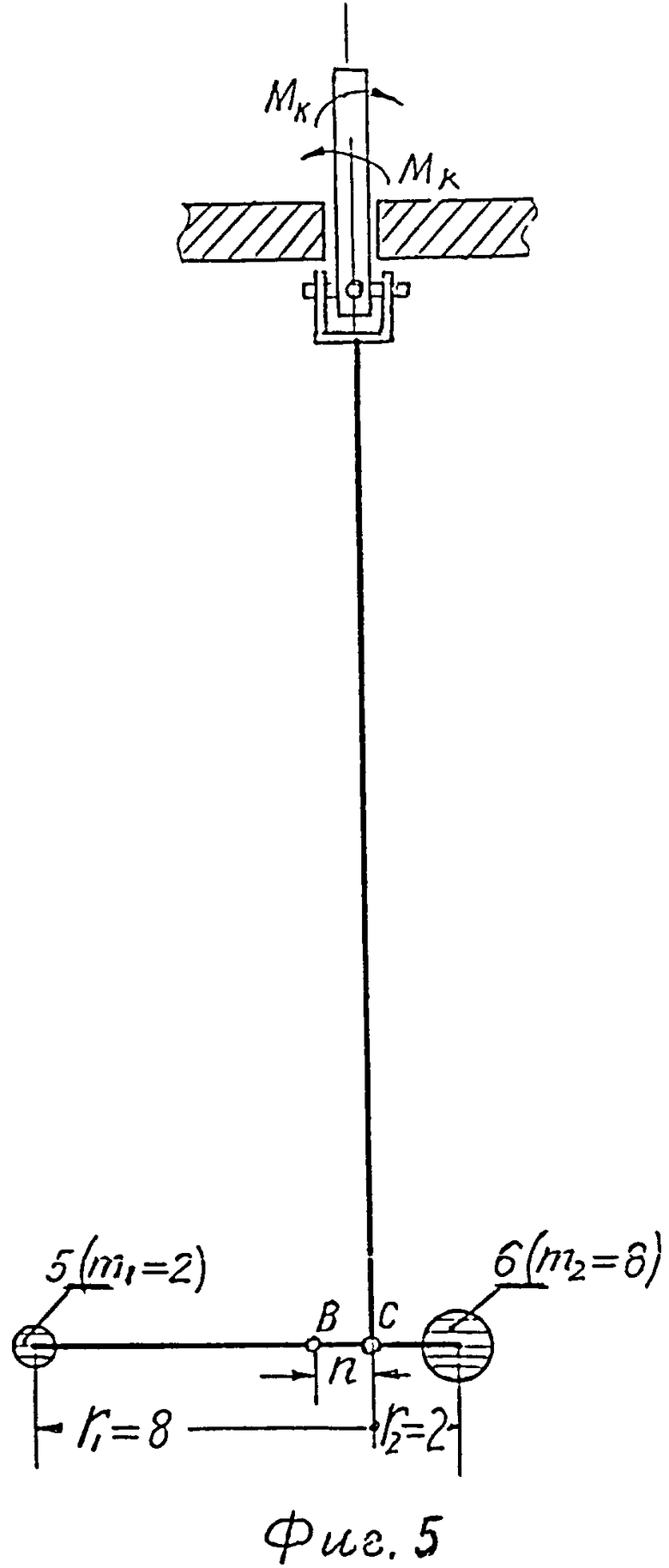
На фиг.5 - схема экспериментальной траверсы на подвесе.
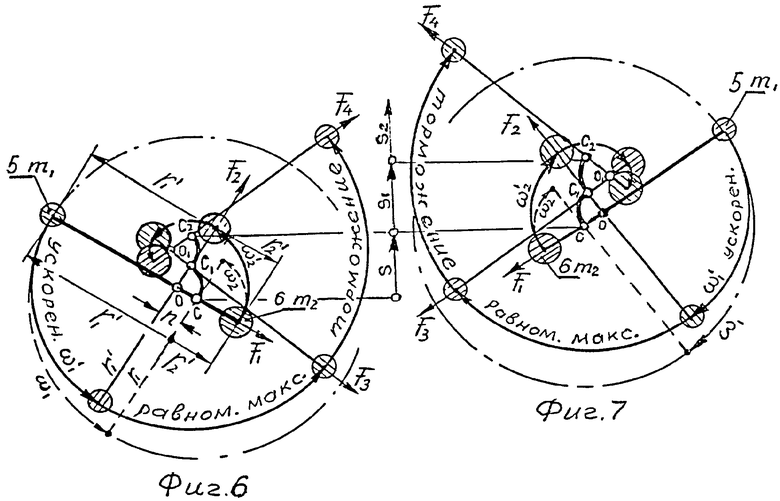
На фиг.6 - кинематическая схема движения грузов и центра масс траверсы
при ее вращении против часовой стрелки (первый цикл).
На фиг.7 - кинематическая схема движения грузов и центра масс траверсы при ее вращении по часовой стрелке (второй цикл).
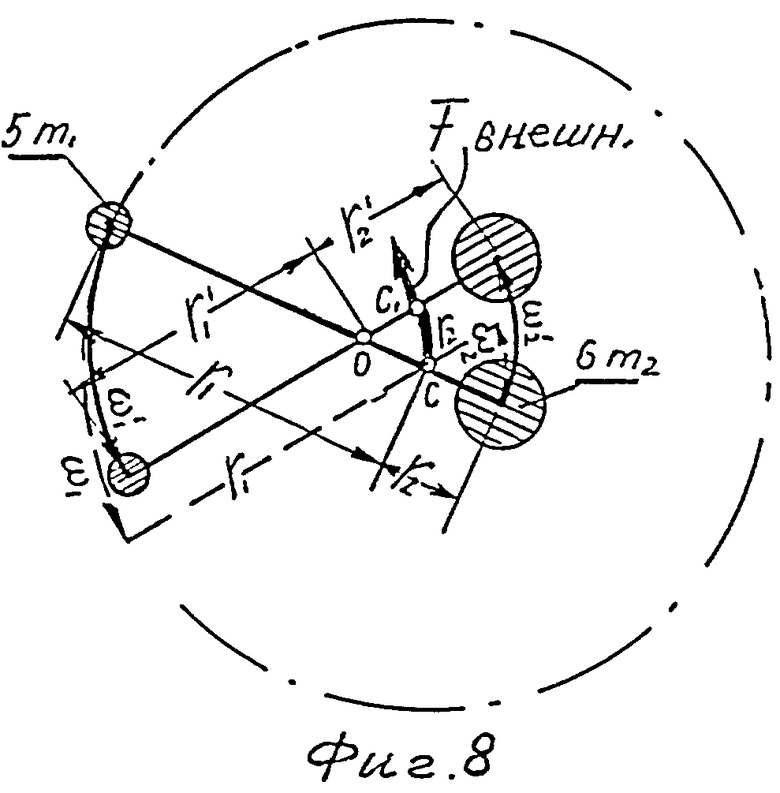
На фиг.8 - кинематическая схема движения грузов и центра масс траверсы под действием на траверсу внешней силы.
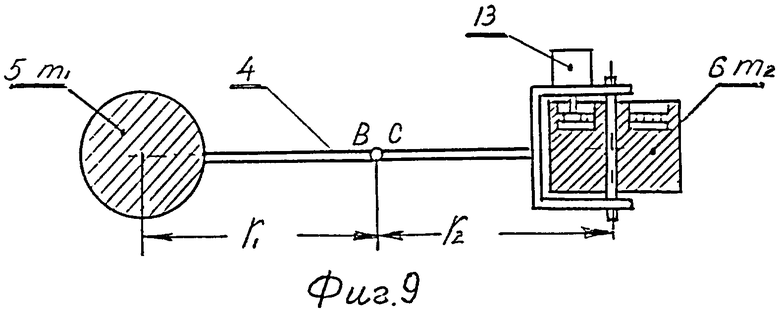
На фиг.9 - разрез симметричной траверсы с грузом-ротором.
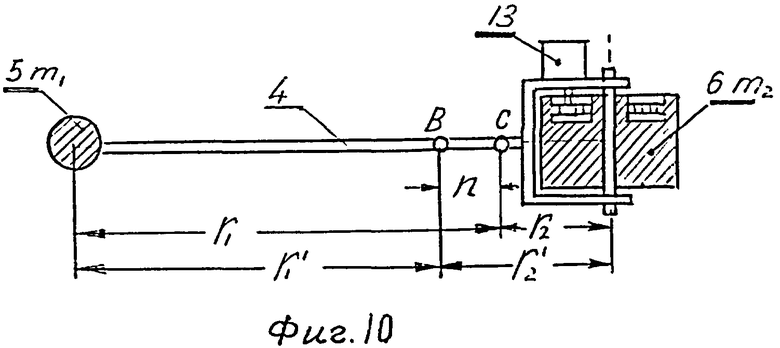
На фиг.10 - разрез асимметричной траверсы с грузом-ротором.
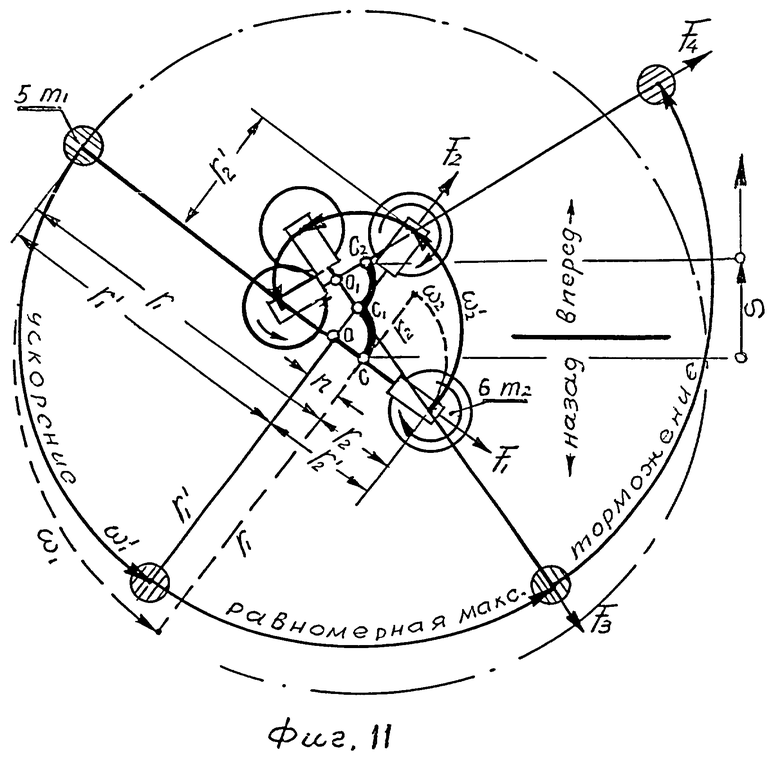
На фиг.11 - кинематическая схема движения грузов и центра масс траверсы с размещенным на ее плече грузом-ротором.
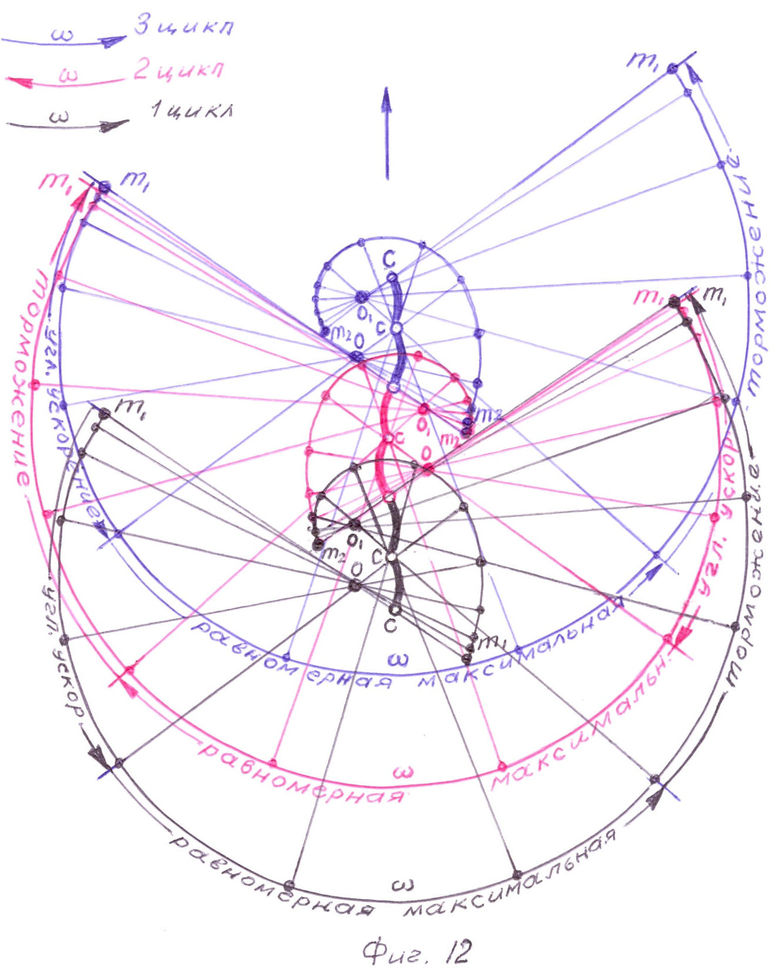
На фиг.12 - кинематическая схема циклической последовательности движения грузов и центра масс траверсы при ее неполнооборотных реверсивных вращательных движениях, на протяжении трех циклов.
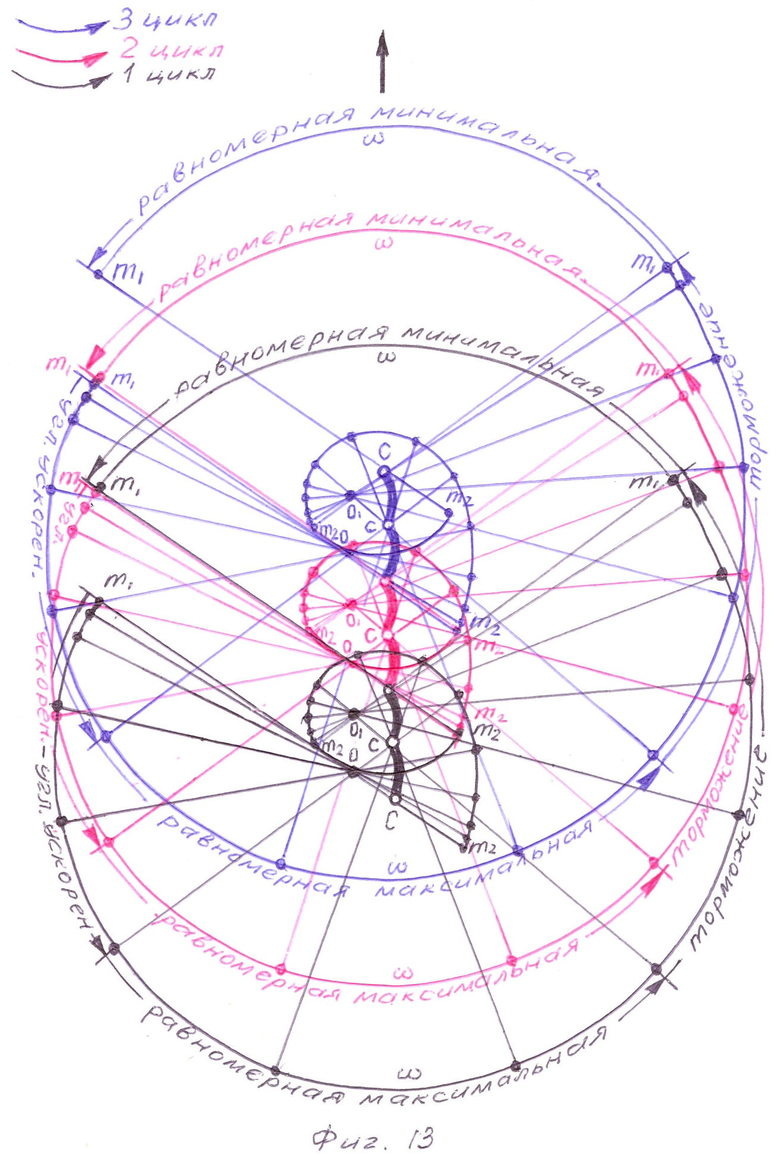
На фиг.13 - кинематическая схема циклической последовательности движения грузов и центра масс траверсы с односторонним вращением траверсы на протяжении трех циклов и соответственно трех оборотов траверсы.
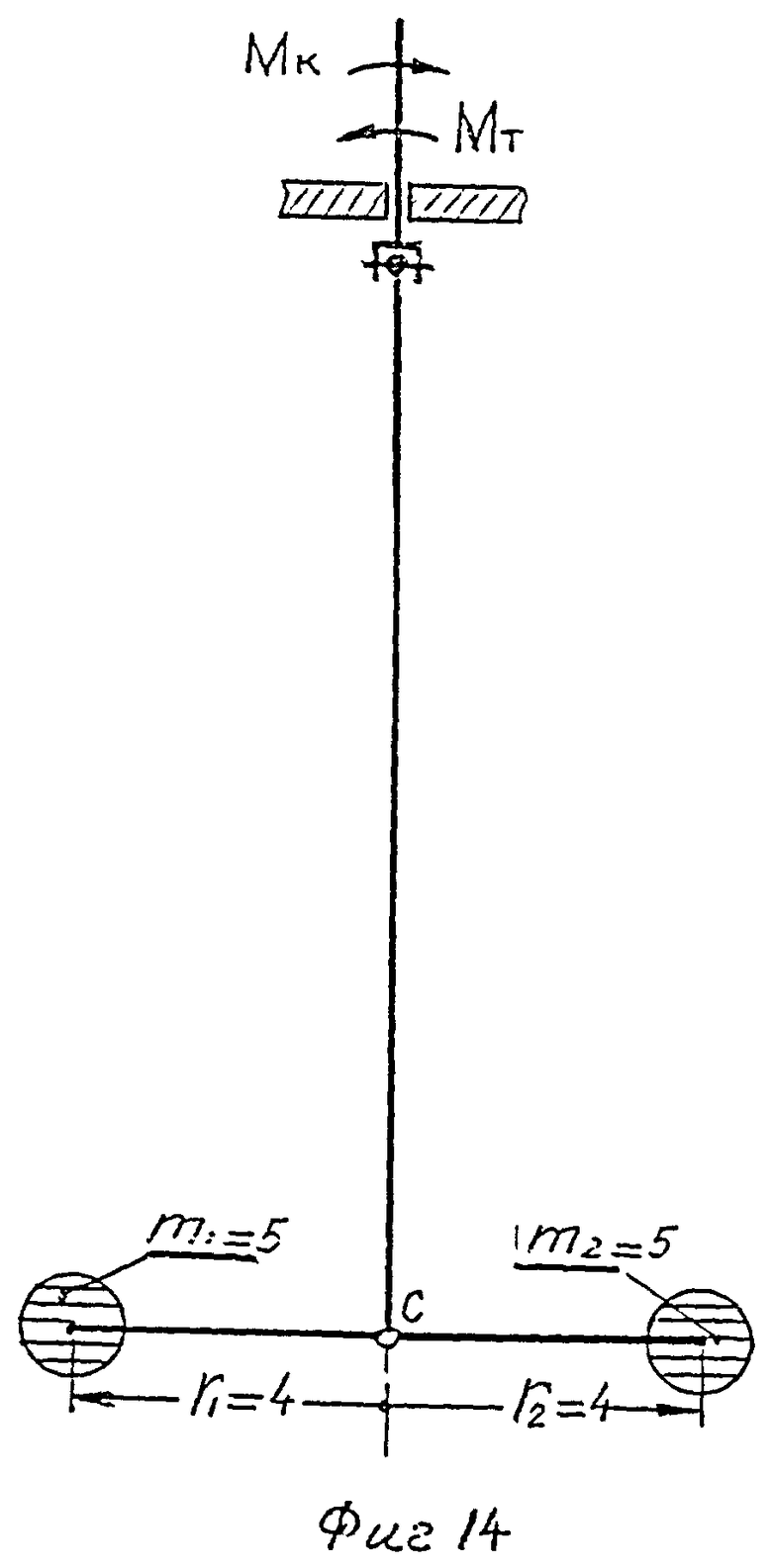
На фиг.14 - симметричная траверса, закрепленная на подвесе.
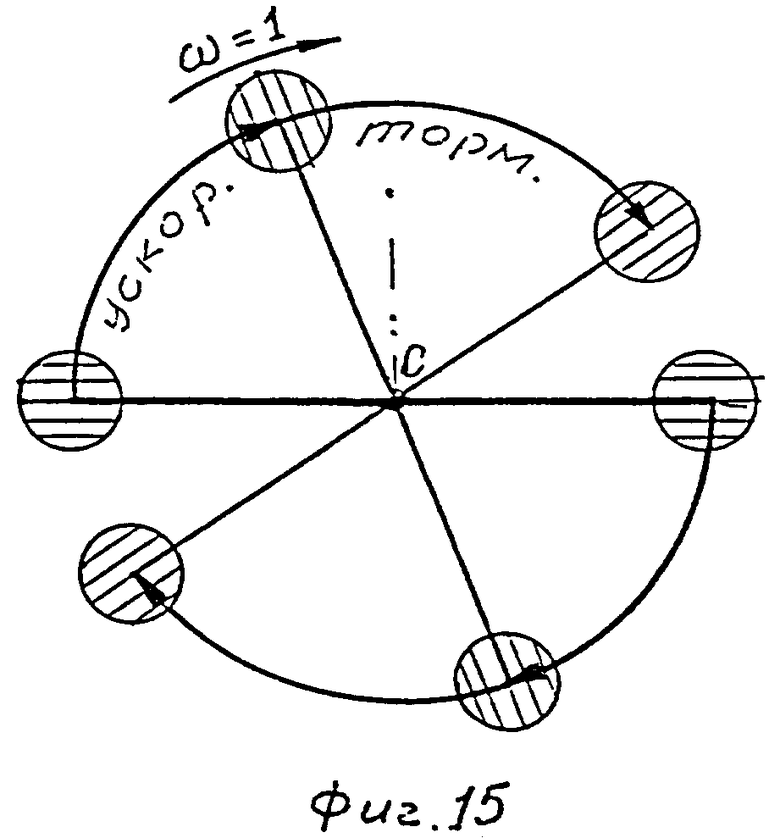
На фиг.15 - кинематическая схема движения грузов симметричной траверсы.
На фиг.16 - асимметричная траверса, вал которой установлен в неподвижной опоре.
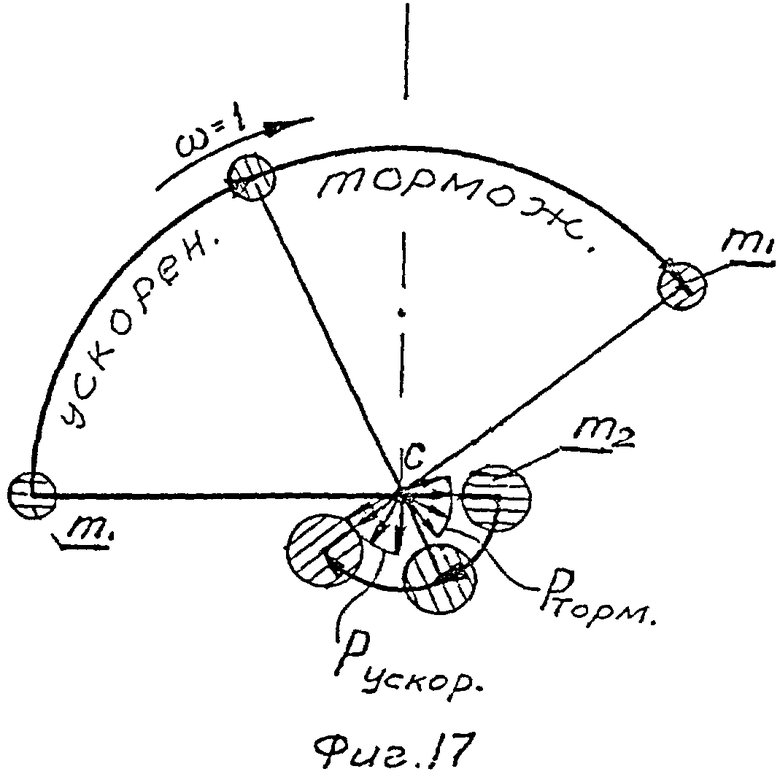
На фиг.17 - кинематическая схема действия боковых сил вала асимметричной траверсы на опору.
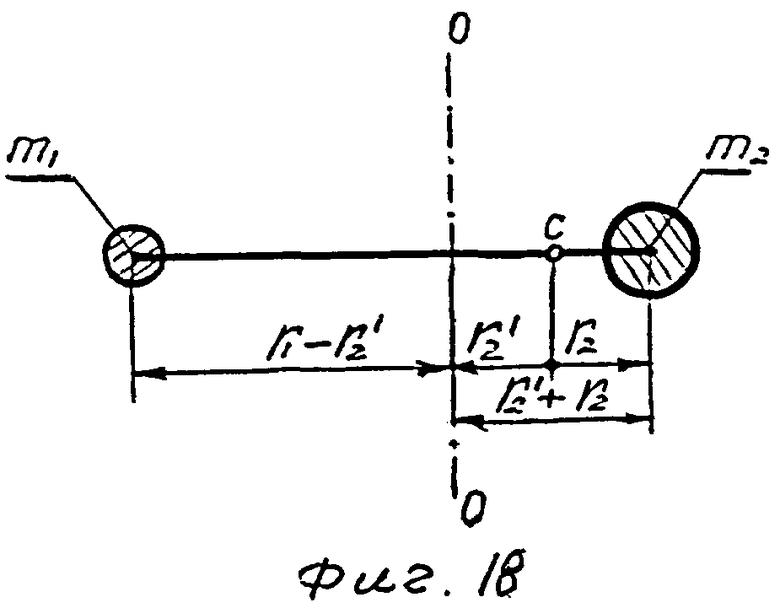
На фиг.18 - схема траверсы, ось вращения которой смещена от центра масс в сторону меньшего груза на величину меньшего плеча траверсы.
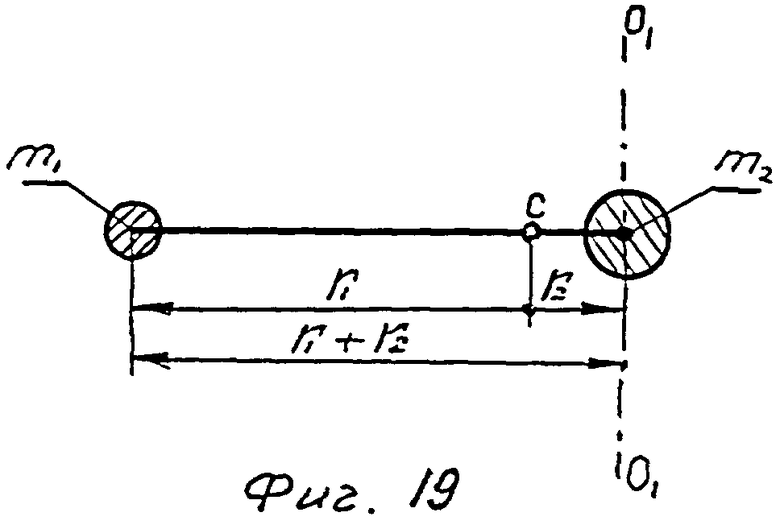
На фиг.19 - схема траверсы, ось вращения которой смещена от центра масс в центр большего груза.
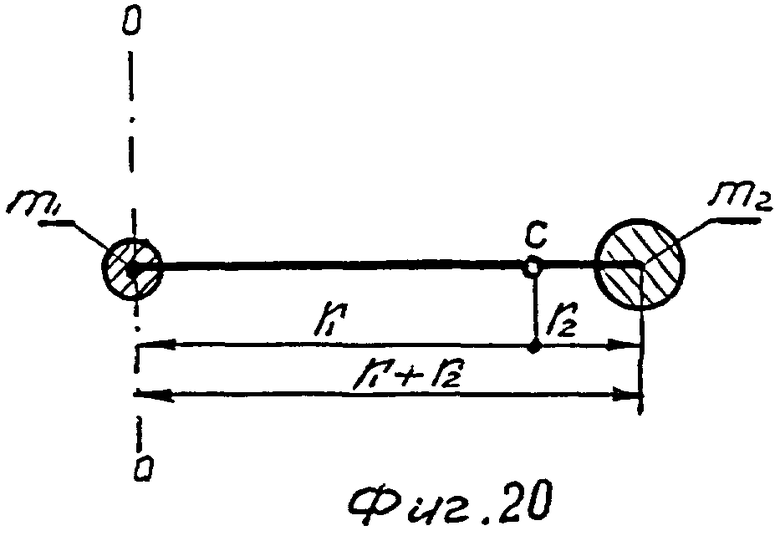
На фиг.20 - схема траверсы, ось вращения которой смещена от центра масс в центр меньшего груза.
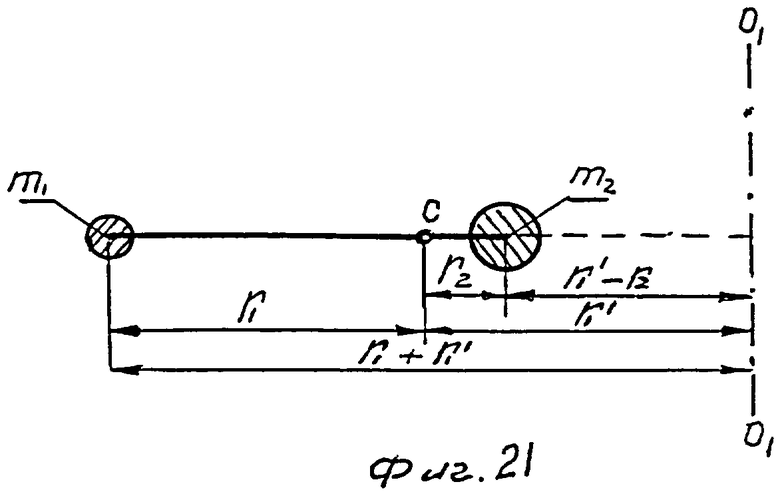
На фиг.21 - схема траверсы, ось вращения которой смещена от центра масс в сторону большего груза на величину большего плеча траверсы.
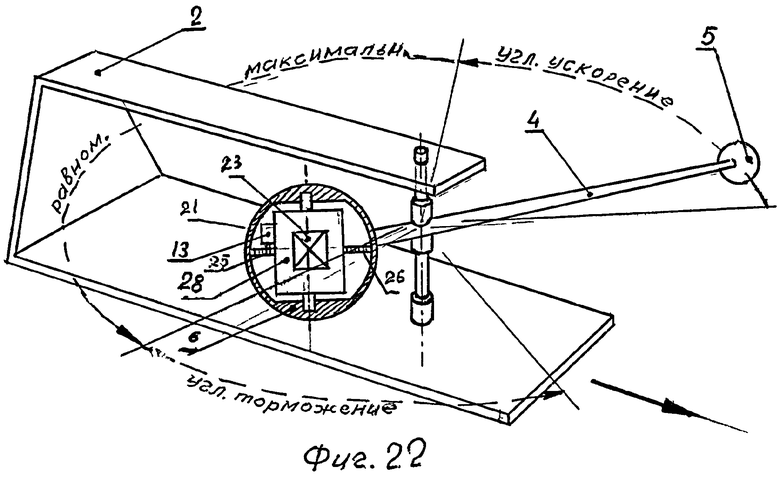
На фиг.22 - общий вид устройства, содержащего одну траверсу.
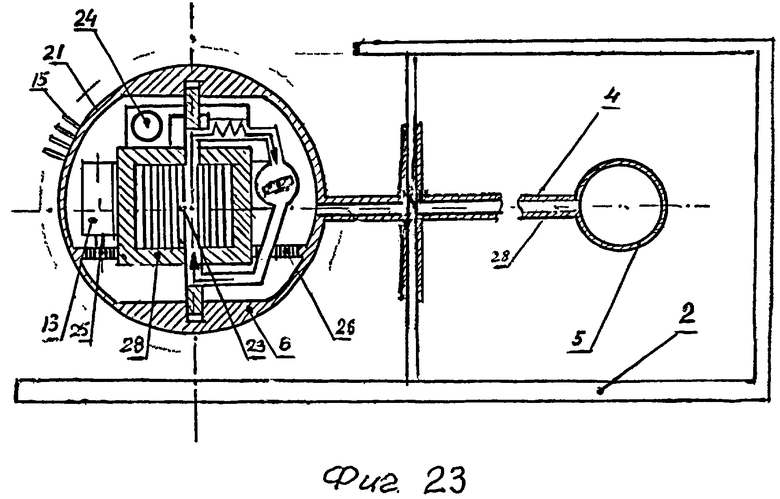
На фиг.23 - конструктивная схема груза-ротора в виде энергетического блока.
Устройство по фиг.1 и 2, 6 и 7 включает корпус 1, содержащий раму, в которой установлен вал 3, и закрепленную на валу траверсу 4 с разными по длине плечами, где плечо r1 (относительно оси вала) больше плеча r2 (в несколько раз), на концах плеч траверсы размещены груз 5 с массой m1 и груз-ротор 6 с массой m2, при этом массы грузов обратно пропорциональны длинам плеч, на которых эти грузы размещены, т.е. r1m1=r2m2. На валу редуктора 7 закреплен кривошип 8, на котором установлен шатун 9, соединенный с зубчатой рейкой-ползуном 10, которая сопряжена с некруглым зубчатым колесом 11 траверсы 4. Профиль зубчатого колеса 11 выполнен с возможностью вращения траверсы с переменной угловой скоростью, а эксцентриситет кривошипа 8 составляет 0,25-0,5 длины начальной кривой зубчатого колеса 11, зубчатое колесо груза-ротора 6 сопряжено с зубчатым колесом реверсивного двигателя 13 траверсы 4.
По конструктивной схеме варианта устройства (фиг.3 и 4) редуктор обеспечивает вращение двух валов 7 в противоположные стороны, при этом на каждом валу 7 (вместо кривошипа 8 по фиг.1 и 2) закреплено некруглое зубчатое колесо 14, которое зацеплено с некруглым зубчатым колесом 11 траверсы 4.
Устройство включает две идентичные траверсы с элементами трансмиссии.
Транспортное устройство по фиг.22 и 23 содержит одиночную автономную траверсу 4 с разной длиной плеч и шарнирно установленную на оси рамы 2, на длинном плече траверсы размещен груз 5 меньшей массы, а на коротком плече траверсы размещен груз 6 большей массы, при этом груз 6 выполнен в виде закрепленной на конце плеча сферы 21, в которой шарнирно установлен груз-ротор, конструктивно выполненный как вращающийся на оси энергетический блок 28, включающий атомный реактор 23, турбогенератор 24 и электродвигатель 13, на валу электродвигателя закреплено зубчатое колесо 25, сопряженное с зубчатым колесом 26 с внутренним зацеплением и закрепленным на внутренней поверхности сферы 21, с возможностью силового реверсивного вращения энергетического блока и траверсы относительно друг друга, на внешней поверхности сферы 21 размещены тепловые трубы - радиаторы 15 для отвода избыточного тепла от энергетического блока во внешнюю среду.
Транспортное устройство может передвигаться относительно опоры двумя способами.
При первом способе от двигателя 12 через редуктор 7 вращают кривошип 8, который посредством соединенного с ним шатуна 9 придает возвратно-поступательные движения зубчатой рейке 10, которая вращает сопряженное с ней некруглое зубчатое колесо 11 и связанную с ним траверсу 4, придавая ей неполнооборотные, реверсивные вращательные движения с переменной угловой скоростью. При этом в пределах неполного оборота траверсы, например 350° дуги, в обоих направлениях вращения, при движении грузов траверсы по первой части дуги (60-120°) траверсу вращают с увеличением ее угловой скорости (фаза раскрутки), при движении грузов по средней части дуги (60-110°) траверсу вращают с равномерной угловой скоростью (по инерции), а при движении грузов по третьей части дуги (60-120°) траверсу вращают с уменьшением ее угловой скорости до полной остановки ее вращения (фаза торможения). Затем траверсу вращают в другую сторону в том же режиме.
По второму способу транспортное устройство по фиг.3 и 4 передвигается относительно опоры при вращении траверсы в одну сторону, для чего от двигателя 12 через зубчатую передачу вращают два вала 7 в разные стороны, при этом закрепленное на каждом валу 7 некруглое зубчатое колесо 14 вращает некруглое зубчатое колесо 11 траверсы 4, придавая ей одностороннее вращение с переменной угловой скоростью, при этом на каждом обороте траверсы при движении ее грузов по первой части окружности траверсу вращают с увеличением ее угловой скорости, при движении грузов по второй части окружности траверсу вращают с равномерной максимальной угловой скоростью, при движении грузов по третьей части окружности траверсу вращают с уменьшением ее угловой скорости, а при движении грузов по последней части окружности траверсу вращают с равномерной минимальной угловой скоростью.
На следующем обороте траверсу вращают в том же режиме.
Транспортное устройство по фиг.22, содержащее автономную траверсу, может передвигаться двумя способами.
Для передвижения транспортного устройства первым способом ротор 22 (атомный реактор) и траверсу 4 посредством электродвигателя 13 вращают относительно друг друга в противоположные стороны, причем с такой угловой скоростью ротора 22, что в результате их вращательного взаимодействия траверса 4 совершает заданные неполнооборотные реверсивные вращательные движения относительно ее центра масс «С», при этом при вращении траверсы 4 в обоих направлениях и движении ее грузов 5 и 6 в пределах дуги 350° при движении грузов по первой части дуги траверсу вращают с увеличением ее угловой скорости; при движении грузов по второй части дуги траверсу вращают с равномерной максимальной угловой скоростью; при движении грузов по последней части дуги траверсу вращают с уменьшением ее угловой скорости, до полной остановки ее вращения, затем траверсу вращают в другую сторону в том же режиме.
Для передвижения транспортного устройства, содержащего одиночную автономную траверсу (фиг.22-23), вторым способом ротор 22 (атомный реактор) и траверсу 4 посредствам электродвигателя 13 вращают относительно друг друга в противоположные стороны, причем с такой угловой скоростью ротора 22, что в результате их вращательного взаимодействия траверса 4 вращается относительно ее центра масс «С» в одну сторону с переменной угловой скоростью на каждом обороте траверсы, причем при движении грузов 5 и 6 по первой части окружности траверсу вращают с увеличением ее угловой скорости; при движении грузов по второй части окружности траверсу вращают с равномерной максимальной угловой скоростью; при движении грузов по третьей части окружности траверсу вращают с уменьшением ее угловой скорости; при движении грузов по последней части окружности траверсу вращают с равномерной минимальной угловой скоростью, затем траверсу вращают в ту же сторону и в том же режиме.
Заявленные способы ускоренного передвижения устройства основаны на открытой автором закономерности, которая проявляется при вращении траверсы в указанных режимах (фиг.6, 7, 12, 13).
На фазе раскрутки траверсы вал 3, получив от привода корпуса через трансмиссию крутящий момент, закономерно делит его поровну между двумя плечами траверсы 4 относительно ее центра масс (оси вала), при этом груз 5, размещенный на длинном плече траверсы r1, исходно имеющий больший момент инерции (инертности), оказывает большее инерционное сопротивление крутящему моменту вала (равному половине общего крутящего момента привода), который для ускорения данного груза 5 оказывается "недостаточным", вследствие чего груз 5 ускоряется медленно. В отличие от этого для груза 6, размещенного на коротком плече r2 и имеющего меньший момент инерции, полученный им крутящий момент (также равный половине общего крутящего момента привода) оказывается "избыточным", вследствие чего груз 6 ускоряется быстрее. Вал траверсы реагирует на это обстоятельство, под действием крутящего момента привода стремится вращаться вокруг такой оси, которая делила бы траверсу на две половины с равными моментами инерции, для того чтобы противоположные грузы оказывали равное инерционное сопротивление крутящему моменту вала, именно это стремление заставляет траверсу вращаться вокруг мгновенной оси "О", которая в это время смещается от центра масс траверсы в сторону размещения груза 5 с большим моментом инерции, а вал 3 (центр масс) смещается при этом в сторону движения груза 6 с меньшим моментом инерции и который в это время движется "вперед". При этом вал 3 оказывает боковое давление на раму и на устройство в целом, заставляя его сместиться относительно опоры в сторону движения груза 6, т.е. тоже вперед.
После фазы раскрутки в соответствии с заданным профилем зубчатого колеса 11 траверса продолжает вращаться с максимальной угловой скоростью (по инерции), при этом вал (центр масс) траверсы не оказывает влияния на движение устройства, которое в это время остается неподвижным относительно опоры.
После равномерного вращения траверсы в соответствии с заданным профилем зубчатого колеса 11 угловую скорость траверсы интенсивно уменьшают до полной остановки вращения траверсы (фаза торможения), при этом груз 6, размещенный на коротком плече траверсы r2, имеющий меньший момент инерции и получивший при раскрутке траверсы, соответственно, меньший момент вращательного импульса, затормаживается быстрее и раньше, чем противоположный груз 5, размешенный на длинном плече r1, исходно имеющий больший момент инерции и получивший при раскрутке траверсы, соответственно, больший момент вращательного импульса, затормаживается медленнее и дольше, вследствие чего вал (центр масс) траверсы (в связи с более ранней остановкой груза 6) смещается вслед за грузом 5 с большим моментом вращательного импульса, который в это время движется "вперед". При этом траверса вращается вокруг мгновенной оси O1, смещающейся от центра масс на этот раз в сторону размещения груза 6. Вал 3 траверсы при этом оказывает боковое давление на раму, а через нее и на устройство в целом, заставляя его сместиться относительно опоры, причем в ту же сторону, что и при раскрутке траверсы, т.е. "вперед".
Как следует из описания, устройство может содержать две идентичные траверсы с элементами трансмиссии. При этом переменные угловые скорости обеих траверс равны по величине, но направлены в противоположные стороны вращения. Таким образом, реактивные вращательные моменты между корпусом и каждой траверсой нейтрализуется другой траверсой. Кроме этого зеркальная симметрия сил, возникающих при работе траверс, улучшает прямолинейность движения устройства.
Как уже сказано, транспортное устройство может быть выполнено в виде одной автономной траверсы (фиг.22). При этом, будучи свободными, траверса 4 и груз-ротор 6 при их силовом вращательном взаимодействии вращаются в противоположные стороны с угловыми скоростями, обратно пропорциональными их моментам инерции.
Для создания крутящих моментов, получаемых автономной траверсой от ее взаимодействия с грузом-ротором 6, в определенное время посредством двигателя 13 груз-ротор 6 интенсивно раскручивают, например, по часовой стрелке, траверса 4 получает при этом реактивное угловое ускорение против часовой стрелки, и вследствие равенства силовых крутящих моментов, полученных каждым плечом траверсы (относительно центра масс), груз-ротор 6 (как масса m2), установленный на коротком плече траверсы и имеющий, соответственно, меньший момент инерции, ускоряется быстрее и в направлении "вперед", при этом увлекает за собой центр масс траверсы, поскольку другой груз 5 (m1), размещенный на длинном плече траверсы и имеющий, соответственно, больший момент инерции, ускоряется медленнее и дольше и является в данном случае "точкой опоры" для смещения центра масс траверсы в направлении движения груза-ротора 6, т.е. "вперед" (C-C1 фиг.11). В это время траверса вращается вокруг мгновенной оси О (В), которая делит траверсу на две половины с равными моментами инерции, при этом мгновенная ось смещается от центра масс по плечу r1 в сторону груза 5 с большим моментом инерции.
После фазы раскрутки двигатель 13 отключают от питания и груз-ротор и траверса продолжают вращаться по инерции (60- 110°) каждый в свою сторону, при этом центр масс траверсы остается неподвижным относительно опоры.
После вращения траверсы по инерции в соответствии с заданным режимом вращения происходит интенсивное торможение груза-ротора 6 относительно траверсы 4 (например, механическим способом, основанным на трении), вращательный импульс, приобретенный грузом-ротором 6 при его раскрутке (относительно траверсы) и направленный по часовой стрелке, передается траверсе, вращающейся в это время против часовой стрелки, вызывая торможение траверсы до полной остановки ее вращения. При этом груз-ротор 6 (как масса m2), размещенный на коротком плече и получивший при раскрутке траверсы меньший момент вращательного импульса, останавливается раньше, а груз 5, размещенный на длинном плече траверсы и соответственно обладающий (после раскрутки траверсы) большим моментом вращательного импульса, продолжает некоторое время свое движение против часовой стрелки, при этом (в связи с более ранней остановкой груза 6) груз 5 увлекает за собой центр масс траверсы и смещает его тоже в направлении "вперед" (С1-С2 фиг.11). Траверса в это время поворачивается вокруг новой мгновенной оси O1, смещенной на этот раз в сторону размещения груза-ротора 6 с меньшим моментом вращательного импульса.
Таким образом, в связи с асимметрией траверсы по длине ее плеч и массам размещенных на них грузов моменты инерции противоположных плеч траверсы оказываются разными по величине, вследствие чего при угловом ускорении и угловом торможении траверсы на ее центр масс циклически действуют боковые силы, вследствие чего при контакте устройства с опорой возникают переменные силы трения, под действием которых устройство передвигается в заданном направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАРТОВЫЙ КОМПЛЕКС ДЛЯ ЗАПУСКА РАКЕТ | 2006 |
|
RU2337041C2 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2084657C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2088770C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2084658C1 |
| СИСТЕМА УПЛОТНЕНИЙ РОТОРНО-ПОРШНЕВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2045663C1 |
| ТУРБИНА | 2006 |
|
RU2362019C2 |
| РЕАКТИВНЫЙ ДВИГАТЕЛЬ БОЛЬШАНИНА | 2006 |
|
RU2322606C2 |
| САМОЛЕТ С РЕАКТИВНОЙ ТЯГОЙ | 2006 |
|
RU2323132C2 |
| САМОЛЕТ С ВЕРТИКАЛЬНЫМИ ВЗЛЕТОМ И ПОСАДКОЙ | 2006 |
|
RU2332332C2 |
| СПОСОБ ГЕНЕРИРОВАНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2091976C1 |

Группа изобретений относится к механическим устройствам для импульсного передвижения за счет сил, возникающих при контакте с опорой. Транспортное устройство включает корпус с приводом вращения и два рабочих вала, на каждом из которых закреплен рычаг с грузом большей массы. Каждый рычаг снабжен грузом меньшей массы и выполнен в виде двуплечей относительно центра масс вала траверсы с коротким и длинным плечами. Груз большей массы размещен на коротком плече траверсы, а груз меньшей массы размещен на длинном плече. Груз большей массы выполнен как груз-ротор, который сопряжен с двигателем траверсы и установлен на оси, расположенной поперек продольной оси траверсы. Груз-ротор кинематически связан с траверсой зубчатой передачей с возможностью реверсивного вращения траверсы и груза-ротора относительно друг друга. Привод корпуса кинематически связан с валами траверс посредством трансмиссии с возможностью вращения каждой траверсы. Вариант транспортного устройства включает груз-ротор, который выполнен как вращающийся на оси энергетический блок с силовым приводом вращения и системой управления. Варианты способа передвижения характеризуются использованием соответствующих вариантов транспортного устройства. Группа изобретений направлена на расширение арсенала механических средств для передвижения. 6 н. и 2 з.п. ф-лы, 23 ил.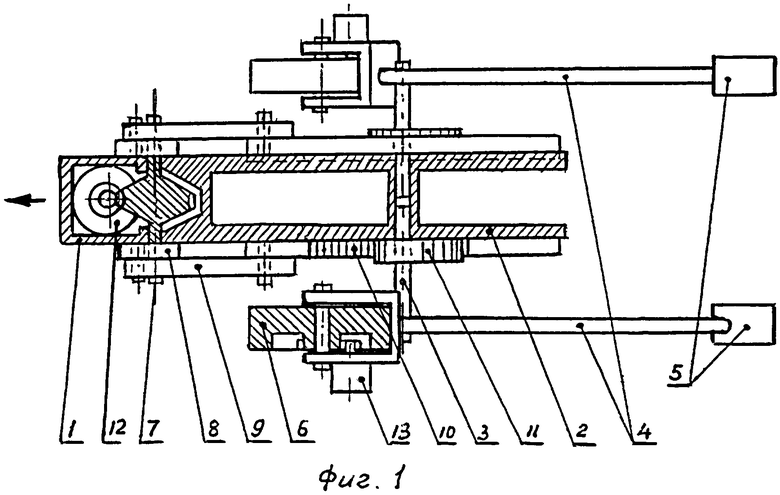
1. Транспортное устройство, включающее корпус с приводом вращения и по меньшей мере два рабочих вала, на каждом из которых закреплен рычаг с по меньшей мере одним грузом большей массы, отличающееся тем, что каждый рычаг снабжен грузом меньшей массы и выполнен в виде двуплечей относительно центра масс вала траверсы с коротким и длинным плечами, причем груз большей массы размещен на коротком плече траверсы, а груз меньшей массы размещен на длинном плече, по меньшей мере груз большей массы выполнен как груз-ротор, который сопряжен с двигателем траверсы и установлен на оси, расположенной поперек продольной оси траверсы, груз-ротор кинематически связан с траверсой зубчатой передачей с возможностью реверсивного вращения траверсы и груз-ротора относительно друг друга, привод корпуса кинематически связан с валами траверс посредством по меньшей мере одной трансмиссии с возможностью вращения каждой траверсы.
2. Транспортное устройство по п.1, отличающееся тем, что каждая трансмиссия выполнена в виде кривошипно-шатунного механизма, где на валу привода корпуса закреплен кривошип с установленным на нем шатуном, который соединен с зубчатой рейкой, зацепленной с некруглым зубчатым колесом вала траверсы, эксцентриситет кривошипа вала привода корпуса составляет 0,25-0,5 длины начальной кривой некруглого зубчатого колеса вала траверсы, а зубчатая рейка выполнена в виде ползуна с криволинейной начальной линией зубьев рейки.
3. Транспортное устройство по п.1, отличающееся тем, что каждая трансмиссия выполнена в виде зубчатой передачи, где на валу привода корпуса закреплено некруглое зубчатое колесо, которое зацеплено с некруглым зубчатым колесом вала траверсы.
4. Транспортное устройство, включающее корпус, на котором шарнирно установлен рычаг с размещенным на нем по меньшей мере одним грузом большей массы, отличающееся тем, что рычаг снабжен грузом меньшей массы и выполнен в виде траверсы, имеющей короткое плечо и длинное плечо относительно оси вращения, при этом на коротком плече размещен груз большей массы, на длинном плече размещен груз меньшей массы, при этом больший груз выполнен как груз-ротор и установлен на оси, расположенной поперек продольной оси траверсы, причем груз-ротор выполнен как вращающийся на оси энергетический блок с силовым приводом вращения и системой управления, обеспечивающими реверсивное вращение траверсы и груза-ротора относительно друг друга.
5. Способ передвижения транспортного устройства по п.1 или 2, включающий вращательные движения двух траверс в противоположные стороны, отличающийся тем, что каждой траверсе придают неполнооборотные реверсивные вращательные движения с переменной угловой скоростью в пределах дуги 350°, при движении грузов по первой части дуги - траверсу вращают с увеличением ее угловой скорости, при движении грузов по средней части дуги - траверсу вращают с равномерной максимальной угловой скоростью, при движении грузов по последней части дуги - траверсу вращают с уменьшением угловой скорости до полной остановки вращения, а затем траверсу вращают в другую сторону в том же режиме.
6. Способ передвижения транспортного устройства по п.1 или 3, включающий вращательные движения двух траверс в противоположные стороны с одинаковой угловой скоростью при вращении каждой траверсы в одну сторону с переменной угловой скоростью, отличающийся тем, что при вращении каждой траверсы и движении грузов по первой части окружности - траверсу вращают с увеличением ее угловой скорости, при движении грузов по второй части окружности - траверсу вращают с равномерной максимальной угловой скоростью, при движении грузов по третьей части окружности - траверсу вращают с уменьшением угловой скорости, при движении грузов по последней части окружности - траверсу вращают с равномерной минимальной угловой скоростью, а на следующем обороте траверсу вращают в ту же сторону в том же режиме.
7. Способ передвижения транспортного устройства по п.4, включающий вращение траверсы с переменной угловой скоростью, отличающийся тем, что траверсе придают неполнооборотные реверсивные вращательные движения с переменной угловой скоростью в пределах дуги 350°, при движении грузов по первой части дуги - траверсу вращают с увеличением ее угловой скорости, при движении грузов по средней части дуги - траверсу вращают с равномерной максимальной угловой скоростью, при движении грузов по последней части дуги - траверсу вращают с уменьшением угловой скорости до полной остановки вращения, а затем траверсу вращают в другую сторону в том же режиме.
8. Способ передвижения транспортного устройства по п.4, включающий вращение траверсы в одну сторону с переменной угловой скоростью в пределах оборота, отличающийся тем, что при вращении траверсы и движении грузов по первой части окружности - траверсу вращают с увеличением ее угловой скорости, при движении грузов по второй части окружности - траверсу вращают с равномерной максимальной угловой скоростью, при движении грузов по третьей части окружности - траверсу вращают с уменьшением угловой скорости, при движении грузов по последней части окружности - траверсу вращают с равномерной минимальной угловой скоростью, а на следующем обороте траверсу вращают в ту же сторону в том же режиме.
| ИНЕРЦИОННОЕ ДВИЖУЩЕЕ УСТРОЙСТВО ИДУ-4 | 1993 |
|
RU2076241C1 |
| МАЯТНИКОВЫЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2096657C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕРАБОТКИ ГРУНТА, ЗАГРЯЗНЕННОГО НЕФТЬЮ И БИОДИЗЕЛЬНЫМ ТОПЛИВОМ | 2008 |
|
RU2389566C1 |
| Способ получения эпоксидной смолы | 1976 |
|
SU653269A1 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2079707C1 |
| US 6745980 A, 08.06.2004. | |||

