Область техники
Настоящее изобретение относится к технологии подавления помехи между кросс-поляризованными волнами, в частности к предпочтительному способу подавления кросс-поляризационной помехи и к устройству подавления кросс-поляризационной помехи, которые соответствующим образом используются в передающей аппаратуре системы передачи с совмещенными каналами при фиксированной микроволновой связи и т.п.
Уровень техники
В качестве способа для подавления кросс-поляризационной помехи в передающей аппаратуре системы передачи с совмещенными каналами или ей подобной использовался XPIC (Подавитель кросс-поляризационной помехи) (см. выложенную Японскую Патентную Заявку 2000-165339: эта публикация упоминается здесь как патентный документ 1). Эта схема выполняет подавление кросс-поляризационной помехи путем генерации сигнала, который подавляет сигнал помехи от волны с ортогональной поляризацией (которая упоминается здесь как противоположная поляризация) относительно волны с наблюдаемой поляризацией (которая упоминается здесь как основная поляризация) с опорой на принятый сигнал с противоположной поляризацией, и добавления его к принятому сигналу.
Для работы XPIC необходимо синхронизировать волну помехи с компонентой несущей принятого сигнала основной поляризации. В квазикогерентной системе обнаружения предпочтительна схема приема с локальной синхронизацией для выполнения синхронизации с локальным сигналом на стороне приемника. В случае схемы приема с локальной синхронизацией не требуется синхронизация локального сигнала на стороне передатчика.
В качестве способа для реализации локальной синхронизации приема при использовании XPIC в передающей системе с совмещенными каналами имеются обычная локальная схема и схема опорной синхронизации. Обычная локальная схема расщепляет выходной сигнал от отдельного локального радиочастотного (RF) генератора на сигналы с двумя поляризациями и подает их на приемники отдельных поляризованных волн. Схема опорной синхронизации подает выходной сигнал от опорного низкочастотного генератора на каждый отдельный локальный RF генератор (LO: локальный Генератор) в приемнике для каждой поляризации так, что каждый локальный генератор генерирует локальный RF сигнал, синхронизированный с опорным генератором, чтобы, тем самым, выполнить синхронизацию с локальным сигналом для каждой поляризации.
Поскольку в обычной локальной схеме выходной сигнал от отдельного локального RF генератора разветвляется на две части, подаваемые на приемники различной поляризации, фазовый шум локального RF сигнала не влияет на характеристики XPIC. Однако, если локальный RF генератор выходит из строя, то связь посредством обеих поляризаций прекращается, и, следовательно, это невыгодно в смысле обеспечения надежности тракта связи.
С другой стороны, в схеме опорной синхронизации, поскольку приемник каждой поляризации включает в себя свой собственный локальный генератор, если один из них выходит из строя, то передающий тракт другой поляризации, который не вышел из строя, не прекратит работу. Следовательно, этот способ выгоден в смысле надежности тракта связи. Однако в этом способе фазовые шумы от локальных RF генераторов ухудшают параметры подавления кросс-поляризационной помехи. Поэтому используются локальные RF генераторы с малым фазовым шумом, но такие генераторы с малым фазовым шумом дорогостоящи, и, следовательно, эта схема не выгодна из-за ее стоимости.
Ниже рассматривается обычный способ подавления кросс-поляризационной помехи.
На фиг.1 показана схема примерной конфигурации системы передачи с совмещенными каналами с использованием обычной локальной схемы. Сигналы IF (Промежуточная Частота), передаваемые с использованием вертикальной (V) поляризации и горизонтальной (H) поляризации, преобразуются посредством смесителей 1, 1' и генераторов 2, 2' в RF сигналы, которые посылаются из антенн 3, 3'. Переданные сигналы принимаются приемными антеннами 4, 4' на стороне приемника. Здесь, для удобства описания, антенные пары 3, 3' и 4, 4' показаны раздельно в соответствии с отдельными поляризациями. В действительности же пары 3, 3' и 4, 4' каждая выполнены на единственной антенне.
В обычной локальной схеме на фиг.1, выходной сигнал от единственного локального генератора 6 разветвляется и используется как RF локальные сигналы для преобразования RF сигналов в IF сигналы.
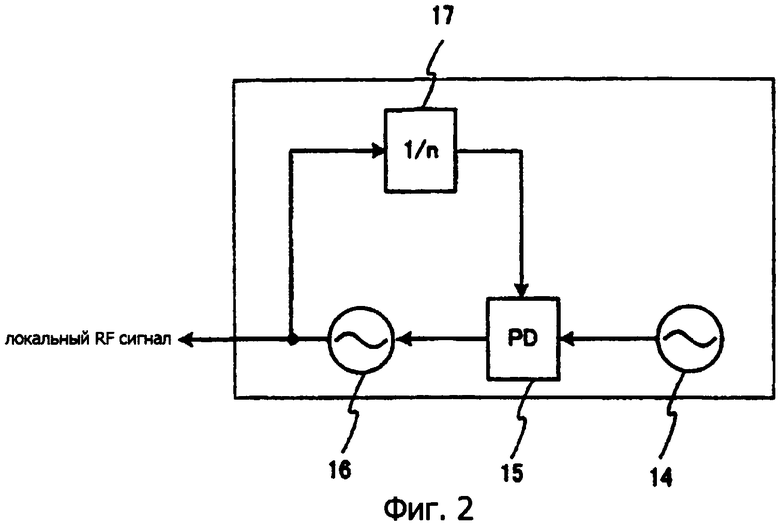
На фиг.2 показана примерная структурная схема локального генератора 6. Локальный генератор 6 включает в себя опорный генератор 14, который выводит низкочастотный сигнал как опорный, фазовый компаратор (PD: фазовый детектор) 15, управляемый напряжением генератор 16 и делитель частоты 17. Входными сигналами фазового компаратора 15 являются выходной сигнал опорного генератора 14 и сигнал, который был получен делением частоты выходного сигнала управляемого напряжением генератора 16 посредством делителя 17 частоты. Поскольку выходной сигнал фазового компаратора 15 является входным сигналом для управляемого напряжением генератора 16, управляемый напряжением генератор 16 образует фазоследящий контур (PLL - контур фазовой автоподстройки частоты - ФАПЧ), который осциллирует на частоте, в n раз большей частоты опорного локального генератора 14. Выходной сигнал от управляемого напряжением генератора 16 используется как локальный RF сигнал.
На фиг.1 RF сигнал, вводимый на приемник через антенну 4, 4', преобразуется в IF сигнал посредством смесителя 5, 5' и вводится на ортогональный демодулятор 8, 8'. Сигнал, вводимый на ортогональный демодулятор 8, 8', ортогонально демодулируется локальным генератором 7, 7', затем ортогонально демодулированный сигнал вводится в демодулятор (DEM) 9, 9', где сигнал обрабатывается посредством воспроизведения несущей, воспроизведения тактового сигнала и т.п. Демодулированный результат вводится в качестве основного сигнала на сумматор 10, 10'.
С другой стороны, IF сигнал, вводимый со стороны противоположной поляризации, также вводится в ортогональный демодулятор 11, 11', так что ортогонально демодулированный сигнал вводится на подавитель поляризационной помехи (который обозначается здесь как XPIC) 12, 12'. В XPIC 12, 12', сигнал противоположной поляризации, создающий помеху сигналу основной поляризации посредством кросс-поляризационной помехи, возникающей в передающем тракте, детектируется для генерации и вывода сигнала, который ее подавляет. Сигнал, выводимый от XPIC 12, 12', настраивается по его повороту фазы на таковой на стороне основного сигнала посредством Непрерывного Фазовращателя (EPS) 13, 13', и результат суммируется с основным сигналом в сумматоре 10, 10', тем самым компенсируя кросс-поляризационную помеху.
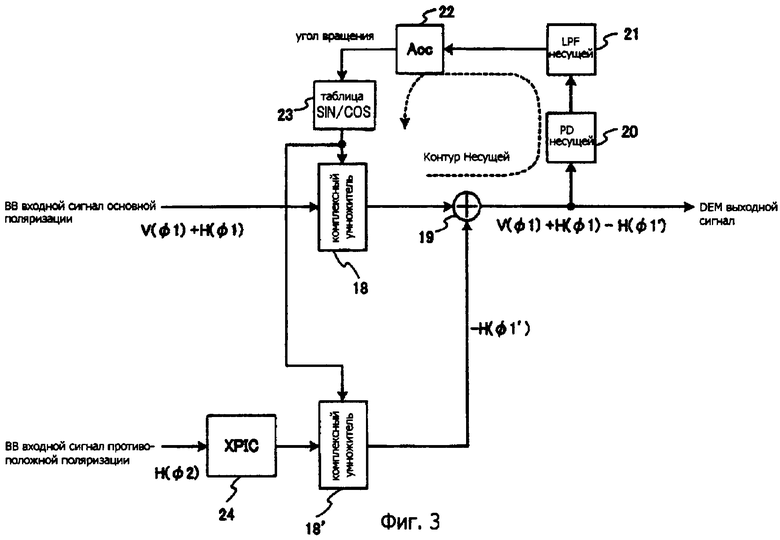
На фиг.3 подробно показан пример части схемы после выходов ортогональных демодуляторов 8 и 11. На фиг.3 комплексный умножитель 18, фазовый компаратор несущей (PD несущей) 20, контурный фильтр (LPF (ФНЧ) несущей) 21, аккумулятор (Acc) 22 и таблица 23 SIN/COS образуют контур воспроизведения несущей PLL, и этот контур воспроизводит несущую.
В XPIC 24, если имеется входной сигнал противоположной поляризации, то генерируется сигнал, который подавляет компоненту кросс-поляризационной помехи, которая оказывает помеховое воздействие на основную поляризацию. Для согласования фазы несущей волны помехи, смешанной в главной поляризации с фазой несущей компенсирующего сигнала, выходящего из XPIC 24, комплексный умножитель 18' поворачивает выходной сигнал от XPIC 24 на тот же самый угол, что и угол поворота основной поляризации. Выходной сигнал от комплексного умножителя 18' суммируется с основной поляризацией в сумматоре 19 так, чтобы подавить кросс-поляризационную помеху. Комплексный умножитель 18' соответствует фазовращателю.
Поскольку в случае этой общей локальной схемы, локальный сигнал, используемый в каждом поляризационном приемнике, подается от общего локального генератора 6, V-поляризация, которая была подвержена фазовому шуму ϕ1, а именно сигнал V(ϕ1), и сигнал H-поляризации, который был смешан в силу кросс-поляризационной помехи и подвержен фазовому шуму ϕ1, а именно сигнал H(ϕ1), вводятся на приемник V-поляризации. Далее, относительно входного сигнала противоположной поляризации сигнал H-поляризации, который был подвержен фазовому шуму ϕ1, подается в виде H(ϕ1). В данном случае, что касается соотношения между компонентой несущей сигнала противоположной поляризации, который создает помеху основной поляризации, и компонентой несущей принятого сигнала противоположной поляризации, то они полностью идентичны, как по частоте, так и по фазе, поскольку для обработки используется тот же самый выходной сигнал от локального генератора 6.
Компонента фазового шума компоненты противоположной поляризации, смешанная с основной поляризацией, есть ϕ1, в то время как фазовый шум принятого сигнала с противоположной поляризацией также есть ϕ1, следовательно, нет никакой разности фаз между двумя сигналами вследствие фазового шума. XPIC 12, показанный на фиг.1, может генерировать устойчивый по фазе корректирующий сигнал, без какого-либо воздействия фазового шума при генерации корректирующего сигнала. Таким образом, в этой схеме фазовый шум от локального генератора не воздействует на возможность подавления кросс-поляризационной помехи.
Однако, как указано выше, проблема общей локальной схемы состоит в том, что связь посредством обеих поляризаций прекращается, если локальный генератор 6 выходит из строя, поскольку выходной сигнал от этого единственного локального генератора 6 разветвляется для использования. Эта особенность невыгодна в смысле обеспечения надежности тракта связи.
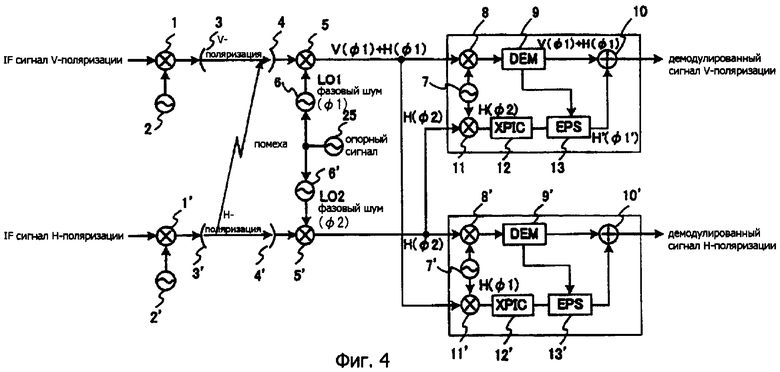
На фиг.4 показан пример структурной схемы системы передачи с совмещенными каналами, использующей схему опорной синхронизации. Как показано на фиг.4, эта конфигурация - та же самая, что и для общей локальной схемы на фиг.1, за исключением того, что каждый поляризационный приемник включает в себя локальный генератор 6 или 6'. В схеме опорной синхронизации каждый поляризационный приемник включает в себя локальный генератор 6, 6'. Затем, чтобы синхронизировать частоты локальных генераторов 6, 6' друг с другом, выходной опорный сигнал от опорного генератора 25 низкой частоты, который должен быть опорой, разветвляется так, чтобы каждый локальный генератор 6, 6' мог генерировать локальный сигнал, синхронизированный с опорным сигналом. При этой архитектуре, если один из локальных генераторов 6, 6' выходит из строя, передающий тракт другой поляризации, который не вышел из строя, не прекратит работу.
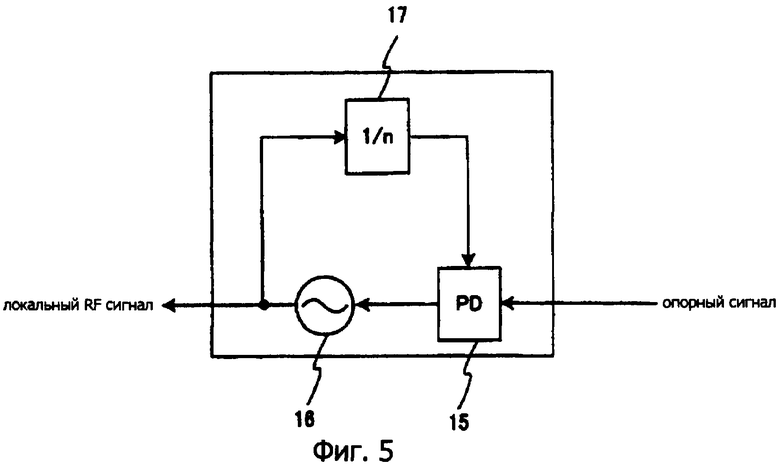
На фиг.5 показан пример структурной схемы локального генератора 6, 6', используемого в схеме опорной синхронизации. Как показано на фиг.5, локальный генератор 6, 6' включает в себя фазовый компаратор 15, управляемый напряжением генератор 16 и делитель 17 частоты. Входными сигналами фазового компаратора 15 являются низкочастотный опорный сигнал извне и сигнал, который является выходным сигналом управляемого напряжением генератора 16, с частотой, поделенной на n делителем 17 частоты. Поскольку выходной сигнал от фазового компаратора 15 является входным сигналом управляемого напряжением генератора 16, то управляемый напряжением генератор 16 составляет контур PLL, который осциллирует с частотой, в n раз большей частоты опорного входного сигнала. Выходной сигнал управляемого напряжением генератора 16 используется как локальный RF сигнал. В схеме опорной синхронизации локальные сигналы, используемые для поляризаций, генерируются различными PLL, так что возникающие фазовые шумы не имеют никакой корреляции друг с другом.
Соответственно, в схеме опорной синхронизации, из-за фазовых шумов, связанных с отдельными локальными генераторами 6, 6' приемников V/H поляризации, фазовое соотношение между выходными локальными сигналами от этих локальных генераторов 6 и 6' всегда изменяется. В результате изменение фазы, которое отражает разность между фазовыми шумами локальных генераторов 6 и 6', появляется между фазой компоненты противоположной поляризации, которая была смешана в основную поляризацию, и фазой принятого сигнала на стороне противоположной поляризации. Более конкретно, как показано на фиг.4, когда сигнал в линии приема V-поляризации, который был подвержен фазовому шуму ϕ1, возникающему в локальном генераторе 6, выражается как V(ϕ1), компонента H-поляризации, которая смешивается с V-поляризацией в передающем тракте, подвержена фазовому шуму ϕ1, который возникает в локальном генераторе 6, формируя H(ϕ1). В результате, сигнал V(ϕ1)+H(ϕ1), как результат кросс-поляризационной помехи, вводится в линию приема V-поляризации.
С другой стороны, из линии приема H-поляризации в XPIC 12 вводится H-поляризованный принятый сигнал, обозначенный как H(ϕ2), который был подвержен фазовому шуму ϕ2 локального генератора 6'. Здесь, для простоты помеха H-поляризации от V-поляризации не будет рассматриваться. XPIC 12 генерирует сигнал, который подавляет сигнал H(ϕ1), создающий помеху входному сигналу основной поляризации, посредством опоры на входной сигнал противоположной поляризации, а именно, H(ϕ2). В то же самое время, XPIC 12 должен генерировать корректирующий сигнал, учитывая даже разность фазы (ϕ1-ϕ2). Поскольку XPIC обычно имеет фазовращающую функцию, оказывается возможным выполнить коррекцию разности фаз (ϕ1-ϕ2), обусловленной фазовым шумом, когда временное изменение этой разности фазы медленнее, чем постоянная времени действия XPIC. Однако, если из-за фазового шума происходит изменение фазы, превышающее постоянную времени XPIC, то для XPIC невозможно достигнуть надлежащей компенсации, и тогда происходит ухудшение характеристик.
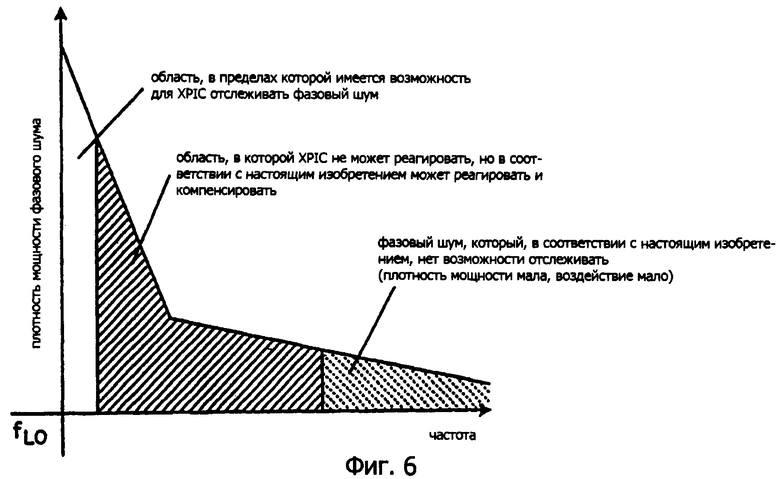
Эта ситуация рассматривается в связи с фиг.6. На фиг.6 показан график поведения фазового шума локального RF сигнала, представляющий спектр, центрированный на частоте колебаний локального сигнала. Видно, что чем дальше частота перемещается от центра, тем ниже становится плотность мощности, и что чем дальше частота перемещается от центра, тем меньше становится частотная компонента фазового шума. Компонента фазового шума в ограниченной области низких частот может быть отслежена посредством XPIC, и влияние фазового шума может быть скомпенсировано.
Вместе с тем, XPIC не может реагировать в области вне диапазона, в котором XPIC может следовать за фазовым шумом так, чтобы компонента фазового шума непосредственно выводилась из XPIC. В результате, когда выходной сигнал XPIC суммируется с сигналом основной поляризации, это не будет соответствовать фазе волны помехи в основной поляризации, и, следовательно, получается ошибка компенсации, приводящая к ухудшению характеристики. Возможно увеличить скорость отслеживания фазового шума, если постоянная времени обновления коэффициентов отводов XPIC сделана большой. Однако это увеличивает шум самого XPIC, так что в действительности имеется предел увеличения постоянной времени XPIC. Поэтому когда используется XPIC на основе схемы опорной синхронизации, необходимо использовать дорогостоящий локальный генератор, который обеспечивает низкий фазовый шум-фактор.
Раскрытие изобретения
Как описано выше, когда обычная локальная схема принята как способ реализации локальной синхронизации приема, когда XPIC используется в системе передачи с совмещенными каналами, имеется преимущество в том, что фазовый шум от локального генератора не будет влиять на возможность подавления кросс-поляризационной помехи. Однако, поскольку выходной сигнал от единственного локального генератора разветвляется для использования, имеется проблема в том, что обе передачи посредством двух поляризаций одновременно прекращаются, если этот локальный генератор выходит из строя. Это невыгодно в смысле обеспечения надежности тракта связи.
С другой стороны, схема опорной синхронизации, в которой локальный генератор, который предоставляется для приемника каждой поляризации, синхронизирован по частоте на основе сигнала от опорного генератора, имеет преимущество в том, что, если один локальный генератор выходит из строя, то может быть сохранен тракт связи через другую поляризацию. Однако, хотя любой локальный генератор, предоставленный приемнику каждой поляризации, синхронизирован по частоте сигналом опорного генератора, фазовый шум, имеющийся в каждом локальном генераторе, не связан с другим шумом. Соответственно, имеется проблема в том, что фазовый шум от каждого локального генератора вызывает ухудшение характеристики. Для воспрепятствования ухудшению характеристик, необходимо использовать дорогостоящий локальный генератор, который обеспечит низкий фазовый шум-фактор.
Ввиду вышеизложенных проблем, задача настоящего изобретения заключается в том, чтобы обеспечить способ подавления кросс-поляризационной помехи и устройство, которое может подавлять влияние фазового шума локального генератора, имеющего высокий уровень фазового шума, и может препятствовать фазовому шуму снижать возможность подавления кросс-поляризационной помехи, даже если используется недорогой генератор.
Способ подавления кросс-поляризационной помехи настоящего изобретения представляет собой способ подавления кросс-поляризационной помехи, основанный на схеме локальной синхронизации приема для подавления помехи между основной поляризацией и противоположной поляризацией, причем способ содержит этапы извлечения первой разности фазового шума, которая является разностью фазового шума между основной поляризацией и противоположной поляризацией в локальных генераторах на стороне приемника, посредством сравнения сигнала ошибки, который указывает разность между демодулированным сигналом, который является сигналом основной поляризации, в котором компенсация для кросс-поляризационной помехи была выполнена, и принятым сигналом, который указывает идеальное состояние основной поляризации, с сигналом, компенсирующим кросс-поляризационную помеху, который является сигналом противоположной поляризации, в котором компенсация для кросс-поляризационной помехи была выполнена; и подавления второй разности фазового шума, которая является разностью фазового шума, содержащейся в сигнале, компенсирующем кросс-поляризационную помеху, посредством использования первой разности фазового шума.
Другой способ подавления кросс-поляризационной помехи настоящего изобретения представляет собой способ подавления кросс-поляризационной помехи, основанный на схеме локальной синхронизации приема для подавления помехи между основной поляризацией и противоположной поляризацией, причем способ содержит этапы извлечения первой разности фазового шума, которая является разностью фазового шума между основной поляризацией и противоположной поляризацией в локальных генераторах на стороне приемника, посредством сравнения сигнала ошибки, который указывает разность между демодулированным сигналом, который является сигналом основной поляризации, в котором компенсация для кросс-поляризационной помехи была выполнена, и принятым сигналом, который указывает идеальное состояние основной поляризации, с сигналом, компенсирующим кросс-поляризационную помеху, который является сигналом противоположной поляризации, в котором компенсация кросс-поляризационной помехи была выполнена; и подавления второй разности фазового шума, которая является разностью фазового шума, содержащейся в сигнале противоположной поляризации, на основе которого генерируется сигнал, компенсирующий кросс-поляризационную помеху, посредством использования первой разности фазового шума.
Дополнительно, в вышеупомянутом способе подавления кросс-поляризационной помехи настоящего изобретения, когда вектор сигнала, компенсирующего кросс-поляризационную помеху, есть а', и вектор сигнала ошибки есть e, в угловых координатах вращения фазы, первая разность θ фазового шума может быть извлечена посредством соотношения
θ=π-2×(∠a'oe),
где (∠a'oe) - угол между вектором a' и вектором e, включающий в себя направление вращения.
Далее, применение настоящего изобретения к XPIC схемы опорной синхронизации, в которой, в частности, фазовый шум является проблемой, в качестве схемы локальной синхронизации приема является предпочтительным для противодействия ухудшению характеристик в результате разности фазового шума между локальными генераторами на стороне приемника для основной поляризации и противоположной поляризации.
С другой стороны, устройство подавления кросс-поляризационной помехи настоящего изобретения представляет собой устройство подавления кросс-поляризационной помехи, основанное на схеме локальной синхронизации приема для подавления помехи между основной поляризацией и противоположной поляризацией, причем устройство содержит: детектор ошибки для извлечения разности между демодулированным сигналом, который является сигналом основной поляризации, в котором компенсация для кросс-поляризационной помехи была выполнена, и принятым сигналом, который указывает идеальное состояние основной поляризации, и выходным сигналом ошибки, который указывает извлеченную разность; детектор фазового шума для вывода разности фазового шума посредством сравнения сигнала, компенсирующего кросс-поляризационную помеху, который является сигналом противоположной поляризации, в котором компенсация для кросс-поляризационной помехи была выполнена, с сигналом ошибки; генератор управляющего сигнала для генерации управляющего сигнала, соответствующего разности фазового шума; и фазовращатель, расположенный до или вслед за подавителем кросс-поляризационной помехи для формирования сигнала, компенсирующего кросс-поляризационную помеху, для управления фазой сигнала, компенсирующего кросс-поляризационную помеху в таком направлении, чтобы подавлять разность фазового шума в ответ на введение управляющего сигнала.
Обычно, подавитель кросс-поляризационной помехи (XPIC) использует адаптивно управляемый фильтр с Конечным Импульсным Откликом (FIR). Чтобы подавлять влияние изменения полярности управляющего сигнала из-за шума, генератор коэффициентов отводов имеет относительно большую постоянную времени. С другой стороны, фазовращатель, посредством изменения направления вращения только с сохранением не изменяющейся амплитуды, фокусируется на вращении фазы в качестве его управляемого параметра, следовательно, можно ожидать постоянную времени для высокой скорости.
Далее, поскольку обычно влияние фазового шума на локальный сигнал вызывает изменение главным образом фазы и привносит небольшое изменение в амплитуду, управление фазой фазовращателем облегчает отслеживание быстрого изменения фазы, вызванного фазовым шумом локального сигнала.
Поэтому, в соответствии с настоящим изобретением, комбинация XPIC и фазовращателя, который управляется сигналом, соответствующим разности фазового шума между локальными сигналами, обеспечивает структуру, в которой компонента фазового шума поглощается фазовращателем, в то время как другое изменение амплитуды регулируется самим XPIC, тем самым, позволяя подавить влияние фазового шума.
В настоящем изобретении, поскольку предоставлено средство определения разности между фазовыми шумами в локальных генераторах на стороне приемника для основной поляризации и противоположной поляризации из принятого сигнала и подавления разности фазового шума, содержавшегося в сигнале, компенсирующем кросс-поляризационную помеху, основываясь на полученном результате, то для XPIC более не требуется отслеживать разность фазового шума.
Далее, поскольку фазовращатель для подавления разности фазового шума использует меньшее число параметров, варьируемых по сравнению с вращением фазы, основанным на изменении коэффициентов отводов внутри XPIC, постоянная времени для управления может быть сделана малой. Таким образом, возможно сделать постоянную времени XPIC соответственно большей, следовательно, возможно подавить шум от самого XPIC, когда постоянная времени XPIC установлена меньшей.
Кроме того, в XPIC схемы опорной синхронизации, в которой фазовый шум представляет проблему, в настоящем изобретении фаза компоненты помехи, смешанная на стороне основной поляризации, настроена по фазе, посредством определения разности фазового шума между локальными сигналами посредством детектора фазового шума и выдавая вращение фазы, которое подавляет фазовый шум посредством фазовращателя, предоставленного на выходе XPIC. Соответственно, даже в схеме опорной синхронизации возможно создать условие, при котором фазовое соотношение между компонентой несущей волны помехи и компонентой несущей компенсирующего сигнала является устойчивым, так что возможно предотвратить ухудшение характеристик подавления кросс-поляризационной помехи фазовым шумом путем отслеживания фазового шума более высокочастотных компонент.
Кроме того, когда для построения XPIC схемы опорной синхронизации используются недорогие локальные RF генераторы, которые представляют относительно большой фазовый шум, возможно избежать снижения параметров подавления кросс-поляризационной помехи, основанного на фазовом шуме.
Краткое описание чертежей
Фиг.1 - пример конфигурации системы передачи с совмещенными каналами с использованием обычной локальной схемы.
Фиг.2 - пример конфигурации схемы локального RF генератора, используемого для обычной локальной схемы.
Фиг.3 - блок-схема, подробно показывающая пример части схемы после выходов ортогональных демодуляторов в устройстве подавления кросс-поляризационной помехи, показанной на фиг.1.
Фиг.4 - пример структурной системы передачи с совмещенными каналами, использующей схему опорной синхронизации.
Фиг.5 - пример структурной схемы локального генератора, используемого в схеме опорной синхронизации.
Фиг.6 - диаграмма, иллюстрирующая поведение фазового шума в локальном RF сигнале.
Фиг.7 - схема первого примерного варианта реализации настоящего изобретения.
Фиг.8A - схема, иллюстрирующая принцип компенсации фазового шума в первом примерном варианте реализации.
Фиг.8B - схема, иллюстрирующая принцип компенсации фазового шума в первом примерном варианте реализации.
Фиг.8C - схема, иллюстрирующая принцип компенсации фазового шума в первом примерном варианте реализации.
Фиг.9A - схема, иллюстрирующая принцип компенсации фазового шума в первом примерном варианте реализации.
Фиг.9B - схема, иллюстрирующая принцип компенсации фазового шума в первом примерном варианте реализации.
Фиг.10 - схема последовательности операций для общего описания способа подавления кросс-поляризационной помехи в первом примерном варианте реализации.
Фиг.11 - блок-схема второго примерного варианта реализации настоящего изобретения.
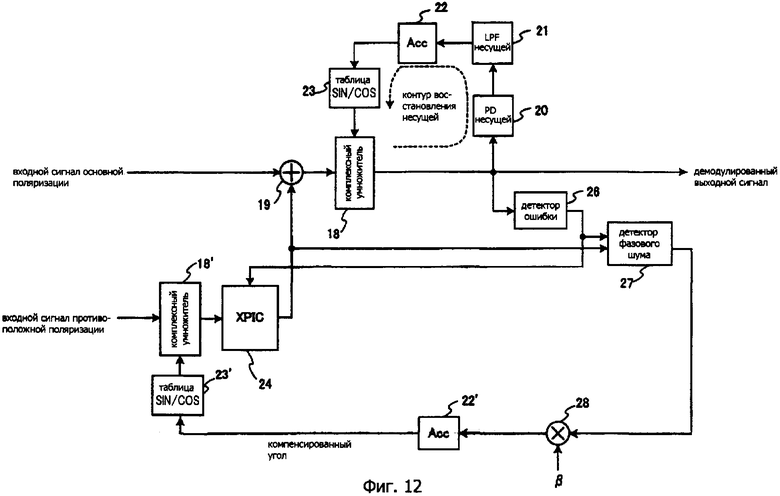
Фиг.12 - блок-схема третьего примерного варианта реализации настоящего изобретения.
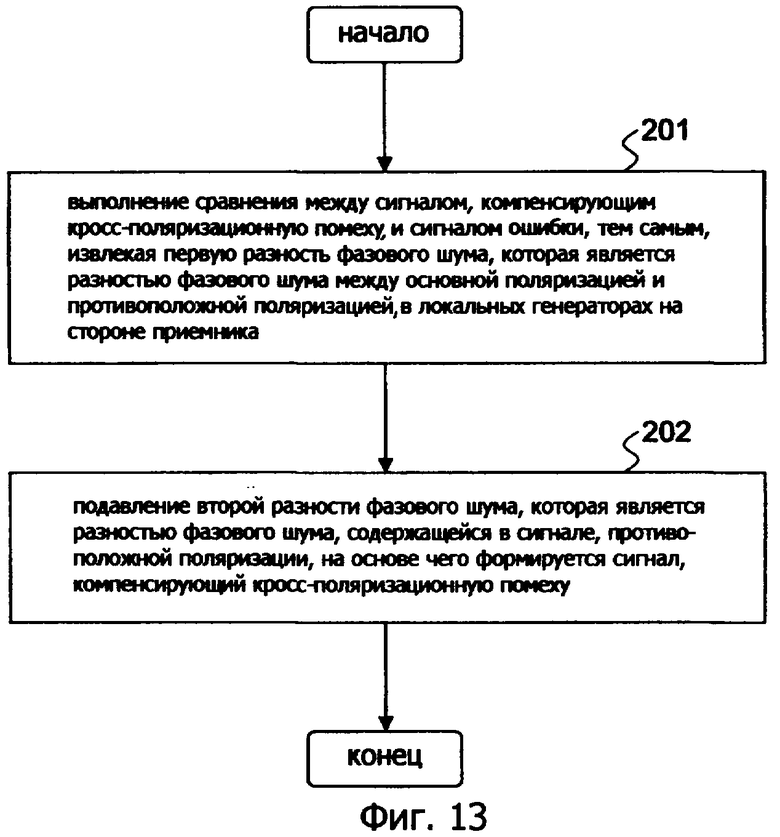
Фиг.13 - схема последовательности операций для общего описания способа подавления кросс-поляризационной помехи в третьем примерном варианте реализации.
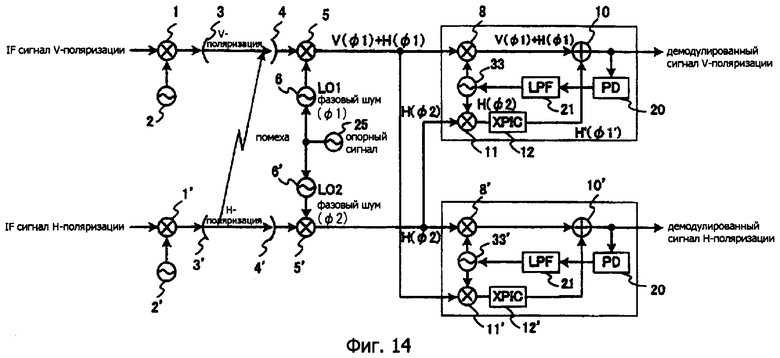
Фиг.14 - полная блок-схема четвертого примерного варианта реализации настоящего изобретения.
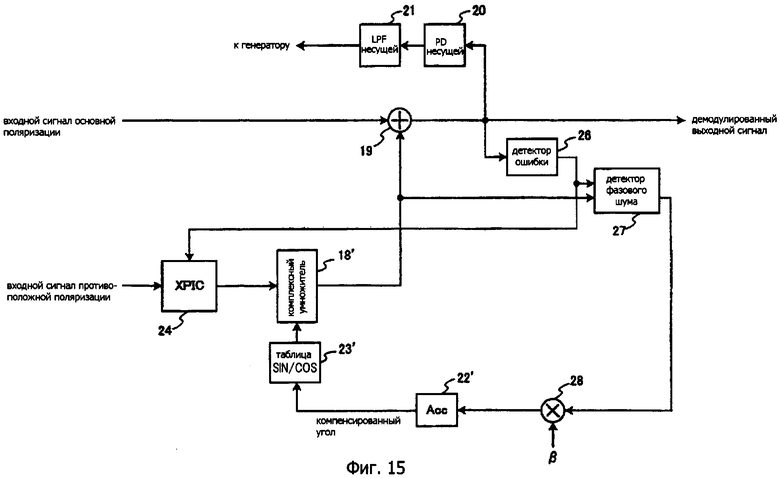
Фиг.15 - блок-схема нисходящей конфигурации выходов из ортогональных демодуляторов в четвертом примерном варианте реализации.
Описание цифровых обозначений
1, 1', 5, 5' - смеситель
2, 2' - генератор
3, 3', 4, 4' - антенна
6, 6',7, 7' - локальный генератор
8, 8', 11, 11' - ортогональный демодулятор
9, 9' - DEM
10, 10', 19, 29 - сумматор
12, 12', 24 - подавитель кросс-поляризационной помехи (XPIC)
13, 13' - EPS
14, 25 - опорный генератор
15 - фазовый компаратор
16 - управляемый напряжением генератор
17 - делитель частоты
18, 18' - комплексный умножитель
20 - фазовый компаратор несущей
21 - контурный фильтр
22, 22' - аккумулятор
23, 23' - таблица SIN/COS
26 - детектор ошибки
27 - детектор фазового шума
28 - умножитель
Лучший режим выполнения изобретения
Первый примерный вариант реализации
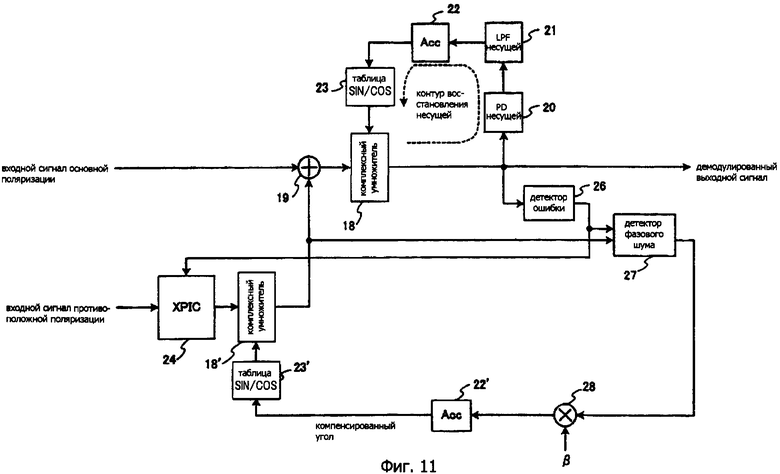
Ниже описывается устройство подавления кросс-поляризационной помехи первого примерного варианта реализации настоящего изобретения. На фиг.7 показана блок-схема существенной части устройства подавления кросс-поляризационной помехи первого примерного варианта реализации, где показана часть после выходов ортогональных демодуляторов 8 и 11, показанных на фиг.4. Конфигурация до входов ортогональных демодуляторов 8 и 11 такова, как показано на фиг.4. Блоки, отмеченные теми же самыми ссылочными позициями, как в обычном примере, показанном на фиг.3, имеют те же самые функции, за исключением того, что входные управляющие сигналы частично различаются.
Прежде всего будет описано соединение для передачи сигнала между компонентами, показанными на фиг.7.
Как показано на фиг.7, выходная сторона комплексного умножителя 18 соединена с сумматором 19. Соединение с выходной стороной сумматора 19 представляет собой сигнальную линию для передачи демодулированных сигналов. Детектор фазы несущей (PD несущей) 20 и детектор 26 ошибки соединены с этой сигнальной линией.
Выходная сторона детектора 20 фазы несущей соединена с сумматором 22 через контурный фильтр (LPF (ФНЧ) несущей) 21. Выходная сигнальная линия от аккумулятора 22 разветвляется на две, причем одна сигнальная линия из двух соединяется с комплексным умножителем 18 через таблицу 23 SIN/COS.
Входной сигнал на XPIC 24 представляет собой сигнал противоположной поляризации. Комплексный умножитель 18' соединен с выходной стороной XPIC 24. Выходная сигнальная линия от комплексного умножителя 18' разветвляется на две, причем одна сигнальная линия из двух соединяется с сумматором 19.
Выходная сигнальная линия от детектора 26 ошибки разветвляется на две, причем одна сигнальная линия из двух соединяется с детектором 27 фазового шума. Другая сигнальная линия соединяется с XPIC 24. Из двух разветвленных выходных сигнальных линий в вышеупомянутом комплексном умножителе 18' другая сигнальная линия соединяется с детектором 27 фазового шума. Выходная сторона детектора 27 фазового шума соединяется с сумматором 29 посредством умножителя 28 и аккумулятора 22'.
Другая сигнальная линия из двух разветвленных выходных сигнальных линий в вышеупомянутом аккумуляторе 22 соединяется с сумматором 29. Выходная сторона сумматора 29 соединяется с комплексным умножителем 18' через таблицу 23' SIN/COS.
Ниже описываются отдельные компоненты.
Комплексный умножитель 18 корректирует фазу несущей входного сигнала основной поляризации и выводит сигнал с его синхронизированной фазой несущей. Детектор 20 фазы несущей детектирует фазовую ошибку входного демодулированного сигнала. Контурный фильтр 21 удаляет высокочастотные компоненты из сигнала, принятого от детектора 29 фазы несущей и выводит результат на аккумулятор 22. Аккумулятор 22 формирует и выводит пилообразное колебание, имеющее частоту, соответствующую сигналу, принятому от контурного фильтра 21. Таблица 23 SIN/COS выбирает сигнал SIN/COS, который указывает угол вращения фазы пилообразного колебания выхода от аккумулятора 22 и выводит его на комплексный умножитель 18.
XPIC 24 включает в себя типичный адаптивно управляемый FIR, и когда вводится сигнал противоположной поляризации, он генерирует сигнал, который подавляет сигнал противоположной поляризации, который был смешан с основной поляризацией, с опорой на сигнал, принятый от детектора 26 ошибки. Зарегистрированная заранее в детекторе 26 ошибки информация указывает идеальные углы вращения фазы для сигнала основной поляризации в комплексном умножителе 18. Эта информация представлена, например, положением узла решетки на координатах, показывающих углы вращения фазы. Детектор 26 ошибки определяет разность между фазой принятого демодулированного сигнала и зарегистрированной идеальной фазой и выводит сигнал ошибки, который указывает разность фаз.
Детектор 27 фазового шума определяет разность фазового шума для указания фазового направления компоненты фазового шума, исходя из выхода из комплексного умножителя 18' и ошибки, определенной в детекторе 26 ошибки.
Умножитель 28 взвешивает разность фазового шума, включенную как часть информации в сигнал, принятый от детектора 27 фазового шума, заданным образом, чтобы, тем самым, отрегулировать управляющее значение разности фазового шума, чтобы реализовать оптимальное управление компенсацией. Сигнал, включающий в себя информацию относительно взвешенной разности фазового шума, является выходным сигналом на аккумулятор 22'.
Аккумулятор 22' считывает информацию относительно разности фазового шума из сигнала, принятого от умножителя 28, и интегрирует разность фазового шума и определяет компенсирующий фазовый угол, который указывает фазовый угол, подлежащий коррекции из интегрированной разности фазового шума, и отсылает его на сумматор 29. Следует отметить, что умножитель 28 и аккумулятор 22' образуют генератор управляющего сигнала. Выходной сигнал генератора управляющего сигнала соответствует управляющему сигналу настоящего изобретения.
Когда информация относительно суммы фазового угла вращения и угол компенсации фазы введены, таблица 23' SIN/COS выбирает сигнал SIN/COS, который указывает фазовый угол, соответствующий информации из таблицы, и отсылает его на комплексный умножитель 18'.
Комплексный умножитель 18' корректирует фазовый угол сигнала в соответствии с сигналом SIN/COS, принятым из таблицы 23' SIN/COS. Следует отметить, что комплексный умножитель 18' соответствует фазовращателю настоящего изобретения.
Ниже кратко рассматривается прохождение сигнала в устройстве подавления кросс-поляризационной помехи настоящего примерного варианта реализации.
Фаза несущей входного сигнала основной поляризации корректируется комплексным умножителем 18 так, что он выводится с синхронизированной несущей. Демодулированный выходной сигнал сумматора 19 вводится в детектор 20 фазы несущей, и фазовая ошибка детектируется детектором 20 фазы несущей. Высокочастотные компоненты удаляются из продетектированного сигнала фазовой ошибки контурным фильтром 21, и результирующий сигнал вводится на аккумулятор 22.
Выходной сигнал от аккумулятора 22 представляет собой пилообразное колебание с частотой, соответствующей входному сигналу. Это пилообразное колебание представляет фазовый угол вращения сигнала основной поляризации в комплексном умножителе 18. Соответственно, сигнал SIN/COS, который указывает выход фазового угла вращения с аккумулятора 22, выбирается из таблицы 23 SIN/COS, и сигнал SIN/COS вводится в комплексный умножитель 18. Здесь, аккумулятор 22 и таблица 23 SIN/COS составляют цифровой управляемый генератор (NCO). Цепь от фазового детектора 20 до таблицы SIN/COS 23 образует контур ФАПЧ (PLL) для выполнения восстановления несущей.
С другой стороны, когда сигнал противоположной поляризации вводится в XPIC 24, сигнал, который подавляет кросс-поляризованную волну помехи, которая была смешана с основной поляризацией, формируется в XPIC 24. Поскольку выходной сигнал XPIC 24 вводится в комплексный умножитель 18', этот сигнал подвергается фазовой коррекции и выводится из комплексного умножителя 18'. Сигнал, который был откорректирован по фазе в комплексном умножителе 18', разветвляется на два, один из которых суммируется с основным сигналом в сумматоре 19, другой вводится в детектор 27 фазового шума.
Детектор 26 ошибки определяет ошибку от узловой точки, которая указывает фазу идеального принятого сигнала относительно демодулированного выходного сигнала сумматора 19, и выводит сигнал ошибки, указывающий эту ошибку. Детектор 27 фазового шума определяет разность фазового шума, которая указывает фазовое направление компоненты фазового шума, исходя из выходного сигнала комплексного умножителя 18' и сигнала ошибки, определенного в детекторе 26 ошибки. Конкретный пример определения разности фазового шума будет подробно рассмотрен ниже. Если рассмотреть способ кратко, то когда выходной сигнал комплексного умножителя 18' выражается как вектор а', а выходной сигнал ошибки детектора 26 ошибки выражается как вектор e в координатах угла поворота фазы, разность θ фазового шума от положения (-a), в котором вектор а' должен быть первоначально расположен, может быть определена как θ=π-2×(∠a'oe).
Сигнал разности фаз, содержащий информацию относительно определенной разности фазового шума, вводится в умножитель 28. Умножитель 28 взвешивает разность фазового шума, чтобы разность фаз определенного фазового шума была с коэффициентом b, чтобы отрегулировать управляющее значение для реализации оптимального управления компенсацией. Корректирующий управляющий сигнал, который указывает отрегулированное управляющее значение, интегрируется в аккумуляторе 22', и результирующий сигнал выводится как фазовый компенсирующий угол, который указывает корректируемый фазовый угол.
Когда сигнал корректируемого угла, содержащий информацию относительно фазового компенсирующего угла, выведенного из аккумулятора 22', вводится в сумматор 29, фазовый компенсирующий угол суммируется с углом поворота фазы на стороне основного сигнала в сумматоре 29, и результирующий сигнал вводится в таблицу 23' SIN/COS. Затем, когда сигнал SIN/COS, полученный из таблицы 23' SIN/COS, вводится в комплексный умножитель 18', сигнал, введенный из XPIC 24, является скорректированным по фазе в комплексном умножителе 18'.
Ниже рассмотрена работа устройства подавления кросс-поляризационной помехи настоящего примерного варианта реализации. На фиг.8 и 9 показаны схемы, иллюстрирующие принцип подавления фазового шума в настоящем примерном варианте реализации.
Контур, образованный детектором 20 фазы несущей, контурным фильтром 21, аккумулятором 22, таблицей 23 SIN/COS и комплексным умножителем 18, является контуром PLL восстановления несущей. Детектор 20 фазы несущей выводит ошибку фазы данной несущей из идеальной фазы. Когда выходной сигнал подается на контурный фильтр 21, контурный фильтр 21 удаляет высокочастотные компоненты из сигнала и преобразует его в частотный сигнал. Когда этот частотный сигнал определен детектором 20 фазы несущей как опережающий по фазе выходной сигнал, комплексный умножитель 18 регулирует скорость вращения фазы в таком направлении, чтобы задержать фазу несущей (задержать частоту). Таким образом устанавливается синхронизация несущей.
XPIC 24, посредством вычисления корреляции между сигналом ошибки из сигнальной точки, продетектированным из сигнала, который был демодулирован из сигнала основной поляризации, детектором 26 ошибки и сигналом противоположной поляризации, введенным в XPIC 24, детектирует сигнал противоположной поляризации, который был смешан в основной сигнал, для формирования, таким образом, сигнала, который его компенсирует. Подробности работы XPIC 24 раскрыты, например, в патентном документе 1, и подробное описание здесь не приводится.
Детектор 26 ошибки детектирует вектор ошибки, чтобы получить вектор, который указывает разность между фактическим положением принятого сигнала и положением (узлом решетки), в котором предположительно находится сигнал основной поляризации. Детектор 27 фазового шума определяет разность фаз между вектором ошибки, вычисленным детектором 26 ошибки, и сигналом кросс-поляризационной помехи, введенным из комплексного умножителя 18', и выводит сигнал ошибки. Этот сигнал ошибки отражает разность фазового шума между основной поляризацией и противоположной поляризацией.
Как показано на фиг.9A, XPIC 24 регулирует амплитуду и фазу сигнала противоположной поляризации, который создавал помехи основному сигналу, и выводит результирующий сигнал. С другой стороны, когда есть причина для формирования фазового шума, как в схеме опорной синхронизации, показанной на фиг.9B, компонента противоположной поляризации, смешанная в основном сигнале, и сигнал, введенный в XPIC из сигнала противоположной поляризации, временно изменяются по фазе. В этом случае, XPIC 24 должен скорректировать изменение фазы фазового шума в любой момент, но постоянная времени XPIC обычно мала по сравнению с частотными характеристиками фазового шума, так что участок, в котором изменение фазы фазового шума не может отслеживаться, проявляется как ухудшение характеристик.
Как показано на фиг.8A (показано на примере QPSK на фиг.8A), XPIC 24 компенсирует влияние помехи посредством вычитания сигнала, компенсирующего помеху, сформированного из сигнала противоположной поляризации, из принятого сигнала, на который воздействовала кросс-поляризационная помеха. На фиг.8A, для исходного сигнала (который указывает идеальный сигнал) D, компонента а помехи смешивается, формируя принятый сигнал, который отклоняется от первоначальной формы (четыре точки QPSK). XPIC 24 генерирует компенсирующую компоненту а' (=-a) для подавления этой компоненты а помехи. Суммирование выходного сигнала XPIC с принятым сигналом, на который воздействовала помеха, позволяет получить принятый сигнал, из которого удалена кросс-поляризационная помеха.
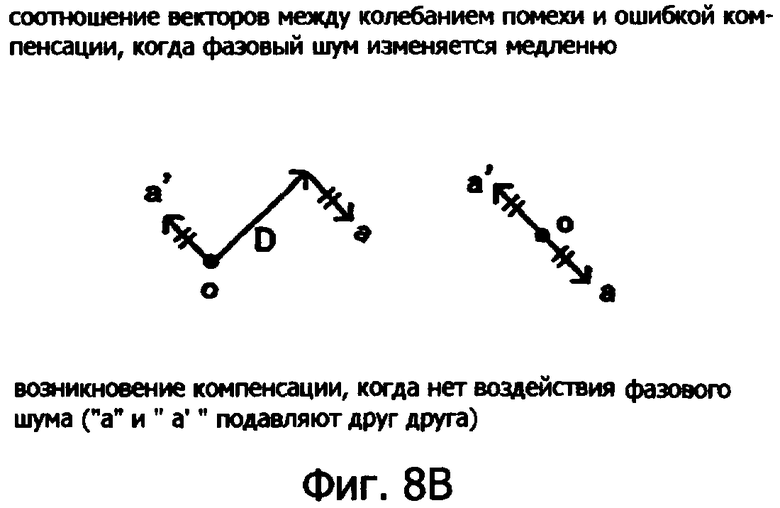
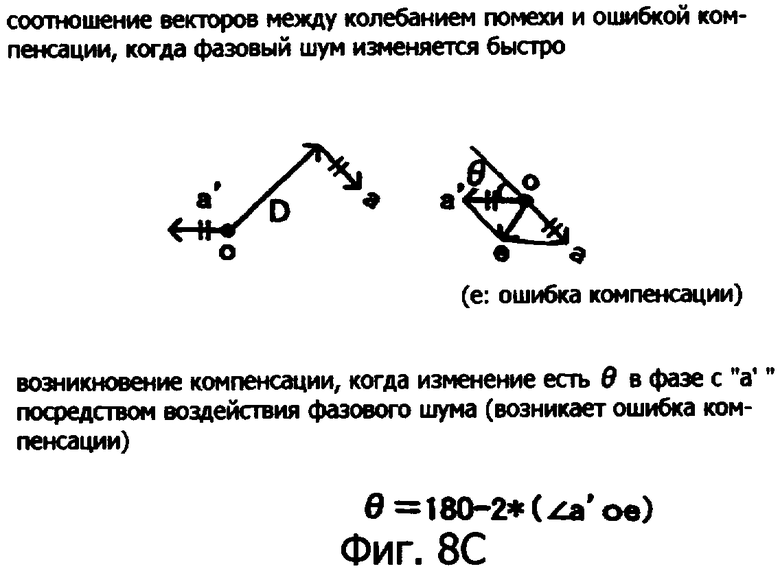
Когда имеется влияние фазового шума, направления компоненты помехи a и компоненты подавления а' непрерывно изменяются от одного момента к другому, хотя они, в среднем, противоположны одно другому. Когда изменение направления медленное, сигналы, отображающие компоненту помехи a и компоненту подавления а', направленные противоположно друг другу, генерируются компенсирующей функцией XPIC 24, как показано на фиг.8B. Однако, когда оно превышает скорость обработки XPIC 24, компонента помехи a и компонента подавления а' не будут ориентированы точно в противоположных направлениях, как показано на фиг.8C. В результате, возникает ошибка e, которую нельзя скомпенсировать, которая в конце концов сдвигает принятую сигнальную точку, ухудшая характеристики приемника.
Как показано на фиг.8C, из волны помехи а, соответствующей компоненте помехи, и компенсирующего сигнала а', соответствующего компоненте подавления, и ошибки компенсации e, те, которые могут реально детектироваться или наблюдаться, это ошибка компенсации e, которая является выходным сигналом детектора 26 ошибок, для детектирования вектора ошибки между положением (узлом решетки), в котором предположительно находится принятая сигнальная точка, и выходной сигнал демодуляции и компенсирующий сигнал а', который является прямым выходным сигналом комплексного умножителя 18'. Как показано на фиг.8C, из соотношения между ошибкой коррекции e и сигналом компенсации а', возможно получить сведения о разности q фазового шума между а' и -a.
Таким образом, когда вектор сигнала, компенсирующего кросс-поляризационную помеху, выражается как а', вектор сигнала ошибки выражается как e, и о обозначает опорную точку этих векторов, разность q фазового шума может быть извлечена посредством θ=π-2×(∠a'oe). Здесь ∠a'oe - угол между вектором a' и вектором e, когда вектор e наблюдается от вектора а' в направлении против часовой стрелки, как показано на фиг.8C. Если эта разность фаз используется для управления комплексным умножителем 18', расположенным на выходе XPIC 24 так, чтобы выполнить регулировку фазы в направлении, которое делает разность фаз между фазой компоненты несущей основной поляризации и фазой компоненты несущей сигнала, компенсирующего кросс-поляризационную помеху, то возможно скомпенсировать влияние фазового шума.
Значение коррекции сигнала с выхода детектора 27 фазового шума регулируется в умножителе 28, и сигнал преобразуется в угол коррекции фазы в аккумуляторе 22'. Затем, угол коррекции фазы от аккумулятора 22' суммируется с углом коррекции фазы от аккумулятора 22, и результирующий сигнал выдается в таблицу 23' SIN/COS. Выходной сигнал от XPIC 24 поворачивается по фазе посредством таблицы 23' SIN/COS и комплексного умножителя 18', чтобы реализовать управление в направлении, которое сокращает разность фазы между сигналом основной поляризации и фазовым шумом, включенным в компоненту несущей сигнала, компенсирующего кросс-поляризационную помеху.
Поскольку фазовый шум в основном не изменяется по амплитуде (изменяется только по фазе), считается, что выходной сигнал комплексного умножителя 18' измененяется только по фазе, но не по амплитуде, тогда как кросс-поляризационная помеха вводится при стабильном фиксированном значении. Соответственно, коэффициентам отводов в XPIC 24 необязательно отслеживать фазовый шум, выполняя компенсацию фазы фазового шума комплексным умножителем 18' расположенным на выходе XPIC 24, следовательно оказывается возможным избежать снижения возможностей подавления кросс-поляризационной помехи на основе фазового шума.
Далее, поскольку вращение фазы, реализуемое комплексным умножителем 18', использует меньшее число изменяемых параметров, по сравнению с вращением фазы посредством изменения коэффициентов отводов в XPIC 24, то возможно снизить постоянную времени для управления. Таким образом, постоянная времени XPIC 24 соответственно велика, и, следовательно, возможно подавить шум, возникающий от самого XPIC, когда постоянная времени установлена малой.
На фиг.10 показана блок-схема последовательности операций при действии способа подавления кросс-поляризационной помехи в настоящем примерном варианте реализации. Как показано на фиг.10, детектор 26 ошибки определяет сигнал ошибки, который указывает разность между демодулированным сигналом и идеальным принятым сигналом основной поляризации, и детектор 27 фазового шума выполняет сравнение между сигналом, компенсирующим кросс-поляризационную помеху, и сигналом ошибки, чтобы тем самым извлечь первую разность фазового шума, которая является разностью фазового шума между основной поляризацией и противоположной поляризацией в локальных генераторах на стороне приемника (Этап 101). Затем комплексный умножитель 18' подавляет вторую разность фазового шума, которая является разностью фазового шума, содержащейся в сигнале, компенсирующем кросс-поляризационную помеху, посредством использования первой разности фазового шума (Этап 102).
Второй примерный вариант реализации
Ниже рассмотрено устройство подавления кросс-поляризационной помехи согласно второму примерному варианту реализации настоящего изобретения. На фиг.11 показана блок-схема устройства подавления кросс-поляризационной помехи второго примерного варианта реализации настоящего изобретения. Вышеупомянутый первый примерный вариант реализации использует способ суммирования сигнала XPIC после установления синхронизации несущей. Второй примерный вариант реализации использует способ суммирования сигнала XPIC перед установлением синхронизации несущей.
В настоящем примерном варианте реализации, поскольку комплексному умножителю 18' на выходе XPIC 24 требуется просто скорректировать только разность фаз, вызванную влиянием фазового шума, то конфигурация может быть соответственно упрощена. По сравнению с первым примерным вариантом реализации, конфигурация для суммирования выходного сигнала аккумулятора 22 и выходного сигнала аккумулятора 22' опущена, как видно из фиг.11.
В данном случае, настоящий примерный вариант реализации и первый примерный вариант реализации отличаются только тем, суммируется ли сигнал XPIC после установления синхронизации несущей или сигнал XPIC суммируется перед установлением синхронизации несущей, а их основное действие остается тем же самым, что и для первого примерного варианта реализации, и поэтому его описание не приводится.
Третий примерный вариант реализации
Ниже рассмотрено устройство подавления кросс-поляризационной помехи третьего примерного варианта реализации настоящего изобретения. На фиг.12 показана блок-схема устройства подавления кросс-поляризационной помехи третьего примерного варианта реализации настоящего изобретения. Настоящий примерный вариант реализации имеет конфигурацию, в которой комплексный умножитель 18' второго примерного варианта реализации расположен на стороне входа XPIC 24. Таким образом, компенсация фазы может также быть выполнена посредством изменения фазы входного сигнала на XPIC 24. В этом случае, комплексный умножитель 18' расположен перед XPIC 24, как показано на фиг.12.
На фиг.13 показана блок-схема последовательности операций в способе подавления кросс-поляризационной помехи в настоящем примерном варианте реализации. Как показано на фиг.13, детектор 26 ошибки определяет сигнал ошибки, который указывает разность между демодулированным сигналом и идеальным принятым сигналом основной поляризации, и детектор 27 фазового шума выполняет сравнение между сигналом, компенсирующим кросс-поляризационную помеху, и сигналом ошибки, для извлечения, тем самым, первой разности фазового шума, которая является разностью фазового шума между основной поляризацией и противоположной поляризацией в локальных генераторах на стороне приемника (Этап 201). Затем, комплексный умножитель 18', используя первую разность фазового шума, подавляет вторую разность фазового шума, которая является разностью фазового шума, содержащейся в сигнале противоположной поляризации, на основе чего формируется сигнал, компенсирующий кросс-поляризационную помеху (Этап 202).
Четвертый примерный вариант реализации
Ниже рассмотрено устройство подавления кросс-поляризационной помехи четвертого примерного варианта реализации настоящего изобретения. На фиг.14 показана полная блок-схема устройства подавления кросс-поляризационной помехи четвертого примерного варианта реализации настоящего изобретения. На фиг.15 показана блок-схема конфигурации после выходов ортогонального демодулятора. На фиг.14 и 15 показаны, соответственно, полная схема и конфигурация после выходов ортогональных демодуляторов, когда настоящее изобретение применяется для устройства подавления кросс-поляризационной помехи, использующего схему когерентного детектирования.
В случае схемы когерентного детектирования, поскольку синхронизация несущей установлена в ортогональных детекторах 8 и 8', ортогональный детектор 8, 8', детектор 20 фазы несущей, контурный фильтр 21 и управляемый напряжением генератор 33 образуют контур PLL, как показано на фиг.14. В случае настоящего примерного варианта реализации, поскольку установлена синхронизация несущей входного сигнала, комплексный умножитель на стороне основного сигнала, показанный на фиг.11, не нужен, как видно из фиг.15.
Кроме того, в настоящем примерном варианте реализации, влияние фазового шума снимается комплексным умножителем 18', расположенным на выходе XPIC 24, таким же образом, как и во втором примерном варианте реализации. Кроме того, возможно также расположить комплексный умножитель 18' перед XPIC 24, как в третьем примерном варианте реализации, описанном в связи с фиг.12, хотя на фиг.15 рассмотрен пример, в котором комплексный умножитель 18' расположен после выхода XPIC 24.
Как описано в с первого по четвертый примерных вариантах реализации, поскольку настоящее изобретение включает в себя средство детектирования разности между фазовыми шумами в локальных генераторах на стороне приемника для основной поляризации и противоположной поляризации из принятого сигнала, и подавления в результате разности фазового шума, содержащейся в сигнале, компенсирующем кросс-поляризационную помеху, для XPIC нет необходимости отслеживать разность фазового шума.
Кроме того, поскольку фазовращатель для подавления разности фазового шума использует меньшее число варьируемых параметров по сравнению с вращением фазы, основанным на изменении коэффициентов отводов внутри XPIC, постоянная времени для управления может быть сделана малой. Таким образом, возможно сделать постоянную времени XPIC соответственно большей, и, следовательно, возможно подавить шум, возникающий в самом XPIC, когда постоянная времени XPIC установлена меньшей.
Кроме того, в XPIC схеме опорной синхронизации, в которой фазовый шум представляет проблему, в настоящем изобретении фаза компоненты помехи, смешанной на стороне основной поляризации, регулируется по фазе посредством детектирования разности фазового шума между локальными сигналами посредством детектора фазового шума и обеспечения вращения фазы, которое подавляет фазовый шум посредством фазовращателя, предусмотренного на выходе XPIC. Соответственно, даже в схеме опорной синхронизации возможно создать условие, при котором фазовое соотношение между компонентой несущей помехового колебания и компонентой несущей компенсирующего сигнала устойчиво, так что возможно исключить ухудшение характеристик подавления поляризационной помехи на основе фазового шума за счет отслеживания фазового шума высокочастотных компонент.
Кроме того, когда для построения XPIC схемы опорной синхронизации используются недорогие локальные RF генераторы, которые имеют относительно большой фазовый шум, возможно избежать снижения возможности подавления кросс-поляризационной помехи на основе фазового шума.
Настоящее изобретение не следует ограничивать вышеупомянутыми примерными вариантами реализации, и в рамках настоящего изобретения могут быть выполнены различные модификации, которые должны быть включены в объем изобретения.





Изобретение относится к технологии подавления помехи между кросс-поляризованными волнами. Достигаемый технический результат - устранение влияния фазового шума локального генератора на возможность подавления кросс-поляризационной помехи. Устройство подавления кросс-поляризационной помехи включает в себя: детектор (26) ошибки для извлечения разности между демодулированным сигналом, который является сигналом основной поляризации, в котором компенсация для кросс-поляризационной ошибки была выполнена, и принятым сигналом, который указывает идеальное состояние основной поляризации, и вывода сигнала ошибки, который указывает извлеченную разность; детектор (27) фазового шума для вывода разности фазового шума посредством сравнения сигнала, компенсирующего кросс-поляризационную помеху, который является сигналом противоположной поляризации, в котором компенсация для кросс-поляризационной помехи была выполнена, с сигналом ошибки; генератор управляющего сигнала для генерации управляющего сигнала, соответствующего разности фазового шума; и фазовращатель (18), расположенный до или вслед за подавителем кросс-поляризационной помехи, для формирования сигнала, компенсирующего кросс-поляризационную помеху, для управления фазой сигнала, компенсирующего кросс-поляризационную помеху в таком направлении, чтобы подавлять разность фазового шума в ответ на введение управляющего сигнала. 3 н. и 5 з.п. ф-лы, 18 ил.
1. Способ подавления кросс-поляризационной помехи, основанный на схеме локальной синхронизации приема, для подавления помехи между основной поляризацией и противоположной поляризацией, содержащий этапы
извлечения первой разности фазового шума, которая является разностью фазового шума между упомянутой основной поляризацией и упомянутой противоположной поляризацией в локальном генераторе на стороне приемника посредством сравнения сигнала ошибки, который указывает разность между демодулированным сигналом, который является упомянутым сигналом основной поляризации, в котором компенсация кросс-поляризационной помехи была выполнена, и принятым сигналом, который указывает идеальное состояние упомянутой основной поляризации, с сигналом, компенсирующим кросс-поляризационную помеху, который является упомянутым сигналом с противоположной поляризацией, в котором имеется компенсация кросс-поляризационной помехи; и
подавления второй разности фазового шума, которая является разностью фазового шума, содержащейся в упомянутом сигнале, компенсирующем кросс-поляризационную помеху, посредством использования упомянутой первой разности фазового шума.
2. Способ подавления кросс-поляризационной помехи, основанный на схеме локальной синхронизации приема для подавления помехи между основной поляризацией и противоположной поляризацией, содержащий этапы
извлечения первой разности фазового шума, которая является разностью фазового шума между упомянутой основной поляризацией и упомянутой противоположной поляризацией в локальном генераторе на стороне приемника, посредством сравнения сигнала ошибки, который указывает разность между демодулированным сигналом, который является упомянутым сигналом основной поляризации, в котором компенсация кросс-поляризационной помехи была выполнена, и принятым сигналом, который указывает идеальное состояние упомянутой основной поляризации, с сигналом, компенсирующим кросс-поляризационную помеху, который является упомянутым сигналом с противоположной поляризацией, в котором была выполнена компенсация кросс-поляризационной помехи; и
подавления второй разности фазового шума, которая является разностью фазового шума, содержащейся в упомянутом сигнале противоположной поляризации, на основе которого создается упомянутый сигнал, компенсирующий кросс-поляризационную помеху, посредством использования упомянутой первой разности фазового шума.
3. Способ подавления кросс-поляризационной помехи по п.1 или 2, в котором, когда вектор упомянутого сигнала, компенсирующего кросс-поляризационную помеху, есть а', и вектор упомянутого сигнала ошибки есть е, в угловых координатах вращения фазы, упомянутая первая разность θ фазового шума извлекается как θ=π-2×(∠a'oe),
где (∠a'oe) - угол между вектором а' и вектором е, включающий в себя направление вращения.
4. Способ подавления кросс-поляризационной помехи по п.1 или 2, в котором в качестве упомянутой схемы локальной синхронизации приема используется схема локальной синхронизации приема, основанная на опорной синхронизации.
5. Устройство подавления кросс-поляризационной помехи, основанное на схеме локальной синхронизации приема для подавления помехи между основной поляризацией и противоположной поляризацией, содержащее:
детектор ошибки для извлечения разности между демодулированным сигналом, который является упомянутым сигналом основной поляризации, в котором компенсация для кросс-поляризационной помехи была выполнена, и принятым сигналом, который указывает идеальное состояние упомянутой основной поляризации, и вывода сигнала ошибки, который указывает извлеченную разность;
детектор фазового шума для вывода разности фазового шума посредством сравнения сигнала, компенсирующего кросс-поляризационную помеху, который является упомянутым сигналом с противоположной поляризацией, в котором компенсация для кросс-поляризационной помехи была выполнена, с упомянутым сигналом ошибки;
генератор управляющего сигнала для генерации управляющего сигнала, соответствующего упомянутой разности фазового шума; и
фазовращатель, расположенный до или вслед за подавителем кросс-поляризационной помехи для формирования упомянутого сигнала, компенсирующего кросс-поляризационную помеху, для управления фазой упомянутого сигнала, компенсирующего кросс-поляризационную помеху, в том же направлении, что и для подавления упомянутой разности фазового шума, в ответ на введение упомянутого управляющего сигнала.
6. Устройство подавления кросс-поляризационной помехи по п.5, в котором упомянутый генератор управляющего сигнала интегрирует разность фазового шума, продетектированную упомянутым детектором фазового шума, и определяет компенсирующий фазовый угол, который указывает фазовый угол, подлежащий коррекции, основываясь на проинтегрированной разности фазового шума, для подачи компенсирующего фазового угла на упомянутый фазовращатель.
7. Устройство подавления кросс-поляризационной помехи по п.5 или 6, в котором упомянутый генератор управляющего сигнала взвешивает упомянутую разность фазового шума, продетектированную упомянутым детектором фазового шума, для регулировки управляющей величины соответственно разности фазового шума.
8. Устройство подавления кросс-поляризационной помехи по п.5 или 6, в котором, когда вектор упомянутого сигнала, компенсирующего кросс-поляризационную помеху, есть а', вектор упомянутого сигнала ошибки есть е, упомянутая разность θ фазового шума извлекается как θ=π-2×(∠a'oe),
где (∠a'oe) - угол между вектором а' и вектором е, включающий в себя направление вращения.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ БИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМОЙ | 2003 |
|
RU2235392C1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

