ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящая система, в целом, относится к системе магнитно-резонансной томографии (МРТ) с радиочастотной (РЧ) катушкой беспроводного типа и способу ее работы.
ПРЕДПОСЫЛКИ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Магнитно-резонансная томография (МРТ) является способом визуализации, который, в целом, использует частотное и фазовое кодирование протонов для реконструкции изображения. В последнее время системы МРТ начали использовать РЧ катушку или катушки беспроводного типа, чтобы воспринимать магнитно-резонансный сигнал, испускаемый субъектом при исследовании МРТ. В частности, беспроводные РЧ катушки получают аналоговую МР-информацию во время периода сбора данных, а затем связанный блок РЧ катушки (также именуемый в данном документе беспроводной РЧ станцией) преобразует аналоговую МР-информацию в форму оцифрованной информации, такую как информация оцифрованных необработанных данных (k-пространство). Затем, беспроводная РЧ станция сообщает оцифрованную информацию контроллеру системы для дальнейшей обработки и/или отображения на дисплее системы МРТ.
Здесь, беспроводная РЧ станция опирается на внутренний тактовый генератор для корректной синхронизации с тактовым генератором системы (например, главным тактовым генератором) системы МРТ. Тем не менее, из-за беспроводной природы беспроводных РЧ катушек и индуцируемого РЧ дрожания и фазового дрейфа, часто сложно точно синхронизировать внутренний тактовый генератор беспроводной РЧ станции с тактовым генератором системы МРТ, используя обычные способы беспроводной связи. Например, может присутствовать варьирующаяся временная задержка на пути прямой видимости (ПВ), пути ПВ с блокировкой и/или пути не ПВ между РЧ станцией и станцией связи у оставшейся части системы МРТ, которая привязана к главному тактовому генератору, которая может быть вызвана перемещением между передатчиком и приемником и/или изменениями в модели канала. Данная варьирующаяся по времени временная задержка может вызывать дрейф между внутренним тактовым генератором у РЧ станции и главным тактовым генератором.
К сожалению, когда внутренний тактовый генератор беспроводной РЧ станции некорректно синхронизирован с тактовым генератором системы МРТ, фазовый шум внутреннего тактового генератора РЧ станции может вызывать искажения изображения в реконструированных изображениях из-за природы используемого способа кодирования, в частности, во время длительных сборов данных. Например, может быть показано, что если требуется, чтобы индуцируемая тактовым генератором среднеквадратичная (RMS) фазовая ошибка в необработанных данных изображения оставалась ниже 1 градуса, тогда управление RMS дрожанием времени должно осуществляться, чтобы оно оставалось меньше 44 пикосекунд (пс) при 64 МГц или меньше 22 пс при 128 МГц.
Соответственно, было бы желательным предоставить систему и способ беспроводной связи для системы МРТ. Дополнительно было бы желательным предоставить систему и способ беспроводной связи для системы МРТ, которые содействуют восстановлению сигнала тактового генератора и синхронизации внутреннего тактового генератора беспроводной РЧ станции с главным тактовым генератором системы МРТ, которые могли бы компенсировать варьирующуюся временную задержку на пути связи между РЧ станцией и станцией связи у оставшейся части системы МРТ. Кроме того, было бы желательным предоставить систему и способ для беспроводной РЧ станции, чтобы синхронизировать внутренний тактовый генератор беспроводной РЧ станции с тактовым генератором системы МРТ на основании передачи системы МРТ, принимаемой через многолучевое распространение.
В одном аспекте настоящее изобретение может предоставлять способ, включающий в себя этапы, на которых: передают от радиочастотного (РЧ) передатчика первой беспроводной станции связи системы магнитно-резонансной томографии (МРТ) первый сигнал передачи, содержащий первый сигнал основной полосы частот, преобразованный с повышением частоты с помощью первого несущего сигнала, причем первый несущий сигнал имеет первую несущую частоту, которая является произведением первого значения и первой частоты гетеродина (Г) первого Г первой станции беспроводной связи, причем первый несущий сигнал синхронизирован с первым Г первой станции беспроводной связи; принимают по беспроводному каналу на РЧ приемнике второй станции беспроводной связи системы МРТ сдвинутый по фазе первый сигнал передачи, содержащий первый сигнал передачи с его фазой, сдвинутой на первый фазовый сдвиг канала, который равен временной задержке беспроводного канала, умноженной на первую несущую частоту; на второй станции беспроводной связи умножают второй сигнал основной полосы частот на сигнал коррекции, чтобы создать скорректированный второй сигнал основной полосы частот, и передают второй сигнал передачи, содержащий скорректированный второй сигнал основной полосы частот, преобразованный с повышением частоты с помощью второго несущего сигнала, причем второй несущий сигнал имеет вторую несущую частоту, которая является произведением второго значения и второй частоты Г второго Г второй станции беспроводной связи, при этом второй сигнал передачи имеет вторую несущую частоту передачи, которая является произведением второго значения и первой частоты Г, и который является синхронным по частоте с первым Г первой станции беспроводной связи; принимают по беспроводному каналу на РЧ приемнике первой станции беспроводной связи сдвинутый по фазе второй сигнал передачи, содержащий второй сигнал передачи с его фазой, сдвинутой на второй фазовый сдвиг канала, который равен временной задержке беспроводного канала, умноженной на вторую несущую частоту передачи; и выявляют на первой станции беспроводной связи временную задержку беспроводного канала из принятого сдвинутого по фазе второго сигнала передачи.
В целом, вторая частота Г будет иметь смещение частоты по отношению к первой частоте Г. Преимущественно, вторая станция беспроводной связи регулирует это смещение частоты при передаче второго сигнала передачи обратно первой станции беспроводной связи. Тем не менее, фазовый сдвиг или ошибка из-за беспроводного канала остается. Первая станция беспроводной связи может обнаруживать суммарную фазовую ошибку, определять член коррекции фазы и кодировать этот член коррекции фазы в сообщении, которое отправляется обратно второй станции беспроводной связи. Вторая станция беспроводной связи затем может использовать этот член коррекции фазы, чтобы генерировать третий сигнал, который является синхронным с первым Г первой станции беспроводной связи. В некоторых вариантах осуществления третий сигнал имеет частоту, которая является произведением второго значения (N1) и первой частоты Г. В некоторых вариантах осуществления третий сигнал может проходить через N1 делитель/предварительный делитель, чтобы прибывать на исходной первой частоте Г.
Другой аспект настоящего изобретения может предоставлять систему, содержащую первую станцию беспроводной связи и вторую станцию беспроводной связи. Первая станция беспроводной связи включает в себя: первый гетеродин (Г), выполненный с возможностью создания первого сигнала Г с первой частотой Г, первый радиочастотный (РЧ) передатчик, и первый РЧ приемник, при этом первый РЧ передатчик выполнен с возможностью передачи первого сигнала передачи, содержащего первый сигнал основной полосы частот, преобразованный с повышением частоты с помощью первого несущего сигнала, причем первый несущий сигнал имеет первую несущую частоту, которая является произведением первого значения и первой частоты Г, причем первый несущий сигнал является синхронным с первым Г. Вторая станция беспроводной связи включает в себя: второй Г, выполненный с возможностью создания второго сигнала Г со второй частотой Г, второй РЧ передатчик, и второй РЧ приемник, при этом второй РЧ приемник выполнен с возможностью приема по беспроводному каналу сдвинутого по фазе первого сигнала передачи, содержащего первый сигнал передачи с его фазой, сдвинутой на первый фазовый сдвиг канала, который равен временной задержке беспроводного канала, умноженной на первую несущую частоту, при этом вторая станция беспроводной связи выполнена с возможностью умножения второго сигнала основной полосы частот на сигнал коррекции, чтобы создавать скорректированный второй сигнал основной полосы частот, при этом второй РЧ передатчик выполнен с возможностью передачи второго сигнала передачи, содержащего скорректированный второй сигнал основной полосы частот, преобразованный с повышением частоты с помощью второго несущего сигнала, причем второй несущий сигнал имеет вторую несущую частоту, которая является произведением второго значения и второй частоты второго Г второй станции беспроводной связи, при этом второй сигнал передачи имеет вторую несущую частоту передачи, которая является произведением второго значения и первой частоты Г, и который является синхронным по частоте с первым Г первой станции беспроводной связи, но имеет переменную фазу из-за первого фазового сдвига канала, который равен временной задержке беспроводного канала, умноженной на вторую несущую частоту, при этом первый РЧ приемник выполнен с возможностью приема по беспроводному каналу сдвинутого по фазе второго сигнала передачи, содержащего второй сигнал передачи с его фазой, сдвинутой на второй фазовый сдвиг канала, который равен временной задержке беспроводного канала, умноженной на вторую несущую частоту передачи, и при этом первая станция беспроводной связи выявляет временную задержку беспроводного канала из принятого сдвинутого по фазе второго сигнала передачи.
В еще одном другом аспекте настоящее изобретение может предоставлять систему, содержащую первую станцию беспроводной связи и вторую станцию беспроводной связи. Первая станция беспроводной связи может включать в себя первый локальный тактовый генератор; первый генератор последовательности псевдослучайных чисел (ПСЧ), выполненный с возможностью генерации первой последовательности ПСЧ с использованием первого локального тактового генератора; и первый передатчик, выполненный с возможностью передачи первого сигнала передачи, включающего в себя первую последовательность ПСЧ. Вторая станция беспроводной связи выполнена с возможностью приема по беспроводному каналу сдвинутого по фазе первого сигнала передачи, содержащего первый сигнал передачи с его фазой, сдвинутой на первый фазовый сдвиг канала, который зависит от временной задержки беспроводного канала. Вторая станция беспроводной связи включает в себя: второй локальный тактовый генератор; второй генератор последовательности ПСЧ, выполненный с возможностью генерации второй последовательности ПСЧ с использованием второго локального тактового генератора; первый тактовый генератор с восстановленным сигналом, восстановленным из принятого сдвинутого по фазе первого сигнала передачи; и процессор, выполненный с возможностью: восстановления первой последовательности ПСЧ из принятого сдвинутого по фазе первого сигнала передачи с использованием восстановленного сигнала первого тактового генератора, и сравнения второй последовательности ПСЧ с восстановленной первой последовательностью ПСЧ, чтобы определять ошибку фазового сдвига кода между первой станцией беспроводной связи и второй станцией беспроводной связи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет более легко понятно из подробного описания примерных вариантов осуществления, представленных ниже, рассматриваемых совместно с сопроводительными чертежами.
Фиг. 1 иллюстрирует примерный вариант осуществления системы 100 магнитно-резонансной томографии (МРТ).
Фиг. 2A иллюстрирует пример локальных тактовых генераторов на двух станциях связи, которые не синхронизированы.
Фиг. 2B иллюстрирует пример локальных тактовых генераторов на двух станциях связи, которые синхронизированы.
Фиг. 3 является чертежом для иллюстрации условий для синхронизации тактового генератора между двумя станциями беспроводной связи, осуществляющими связь по беспроводному каналу с медленно варьирующейся задержкой прохождения.
Фиг. 4 показывает концептуальную схему, иллюстрирующую процесс синхронизации фазы несущей частоты в системе беспроводной связи.
Фиг. 5 показывает функциональную структурную схему, иллюстрирующую компоновку для синхронизации фазы несущей частоты в системе беспроводной связи.
Фиг. 6 показывает функциональную структурную схему системы управления тактового генератора для главной или базовой станции, осуществляющей связь беспроводным образом с удаленной или мобильной станцией.
Фиг. 7 показывает функциональную структурную схему системы управления тактового генератора для удаленной или мобильной станции, осуществляющей связь беспроводным образом с главной или базовой станцией.
Фиг. 8 показывает функциональную структурную схему компоновки для выставления фазы между принятым кодом псевдослучайного шума (ПСЧ) или локальным сгенерированным кодом ПСЧ.
Фиг. 9 иллюстрирует феномен многолучевого распространения, который может возникнуть в системе беспроводной связи применительно к системе МРТ.
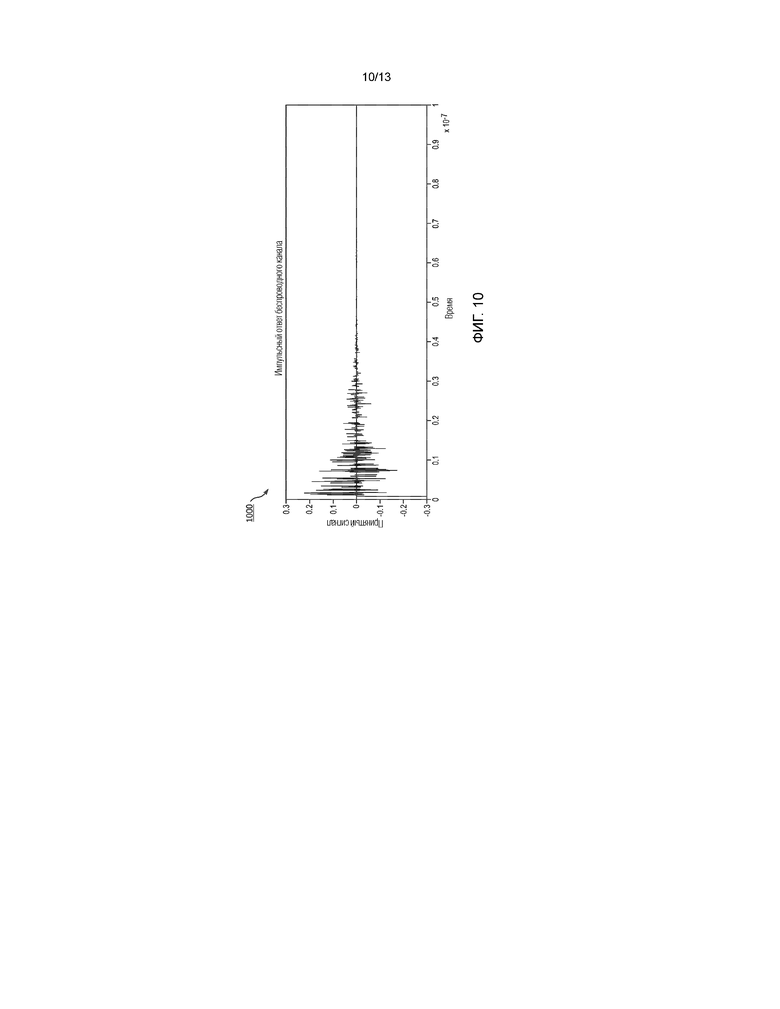
Фиг. 10 иллюстрирует пример импульсного отклика для канала беспроводной связи, который показывает многолучевое распространение.
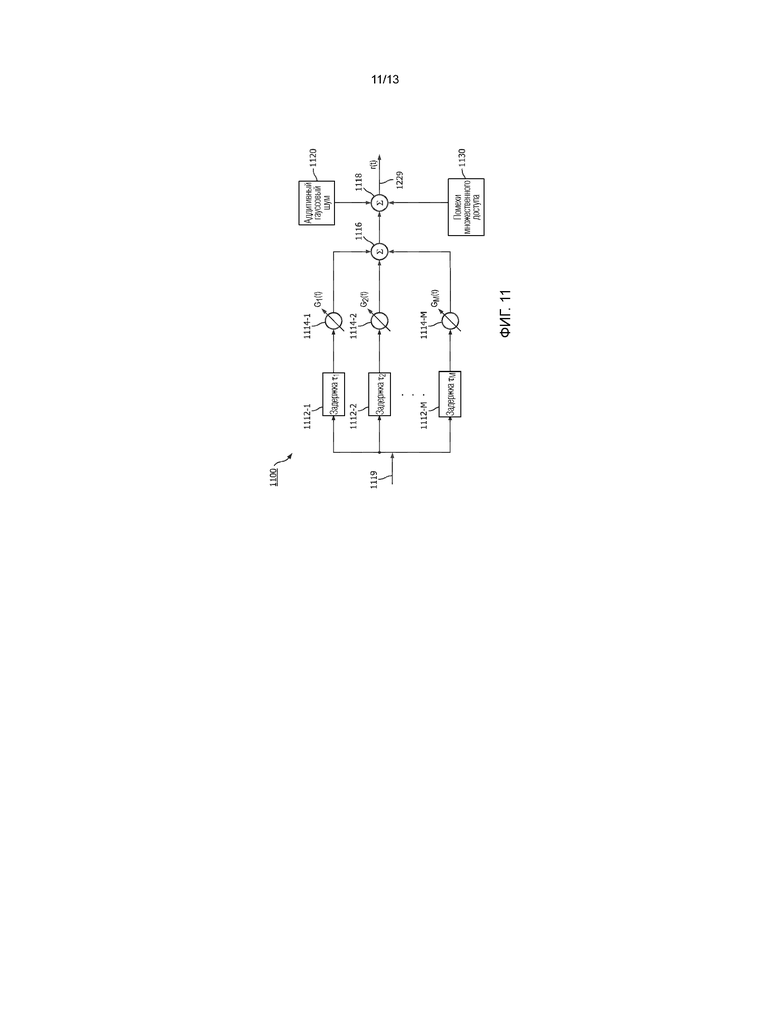
Фиг. 11 иллюстрирует модель канала беспроводной связи, который показывает многолучевое распространение.
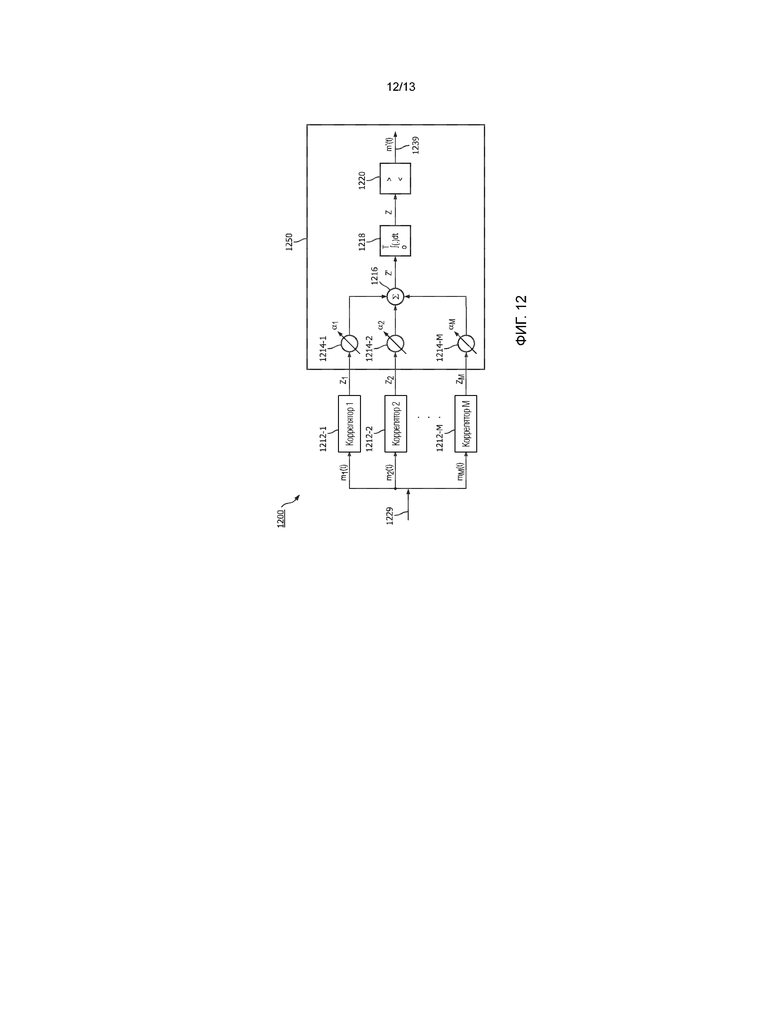
Фиг. 12 иллюстрирует примерный вариант осуществления архитектуры приемника, который может быть использован для приема беспроводного сигнала в канале связи, который показывает многолучевое распространение.
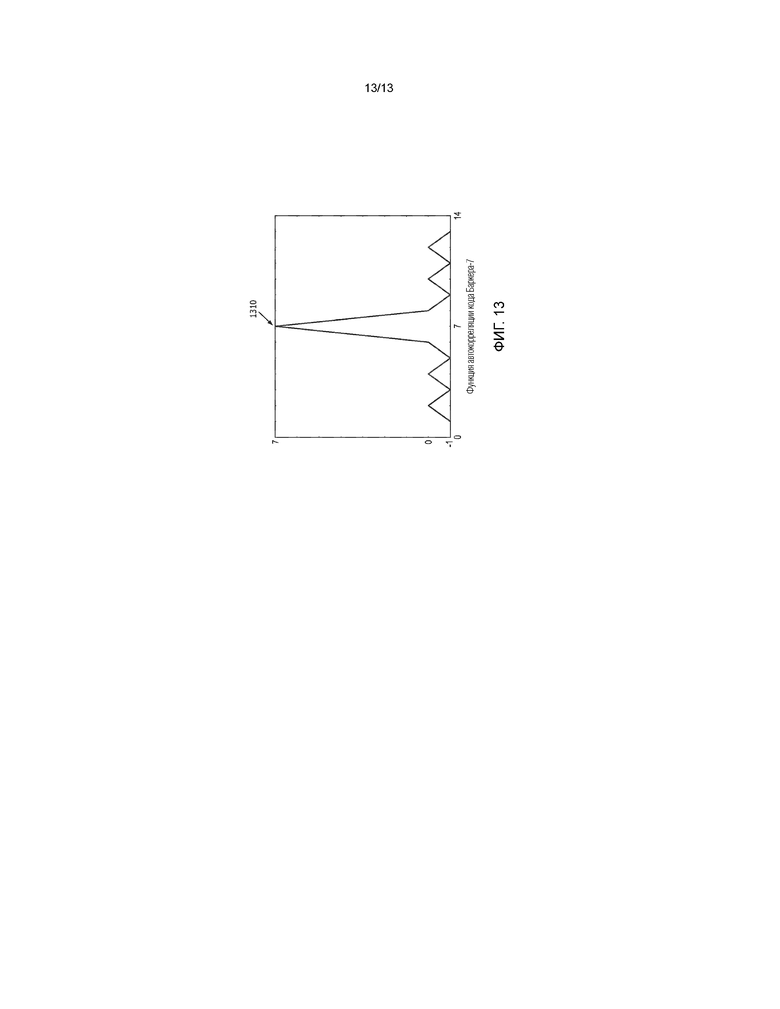
Фиг. 13 иллюстрирует автокорреляцию примера последовательности синхронизации, которая может быть передана станцией беспроводной связи.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящее изобретение теперь будет описано более подробно здесь и далее со ссылкой на сопроводительные чертежи, на которых показаны варианты осуществления настоящего изобретения. Тем не менее, настоящее изобретение может быть воплощено в других формах и не должно толковаться, как ограниченное вариантами осуществления, изложенными в данном документе. Наоборот, эти варианты осуществления предоставлены в качестве обучающих примеров изобретения.
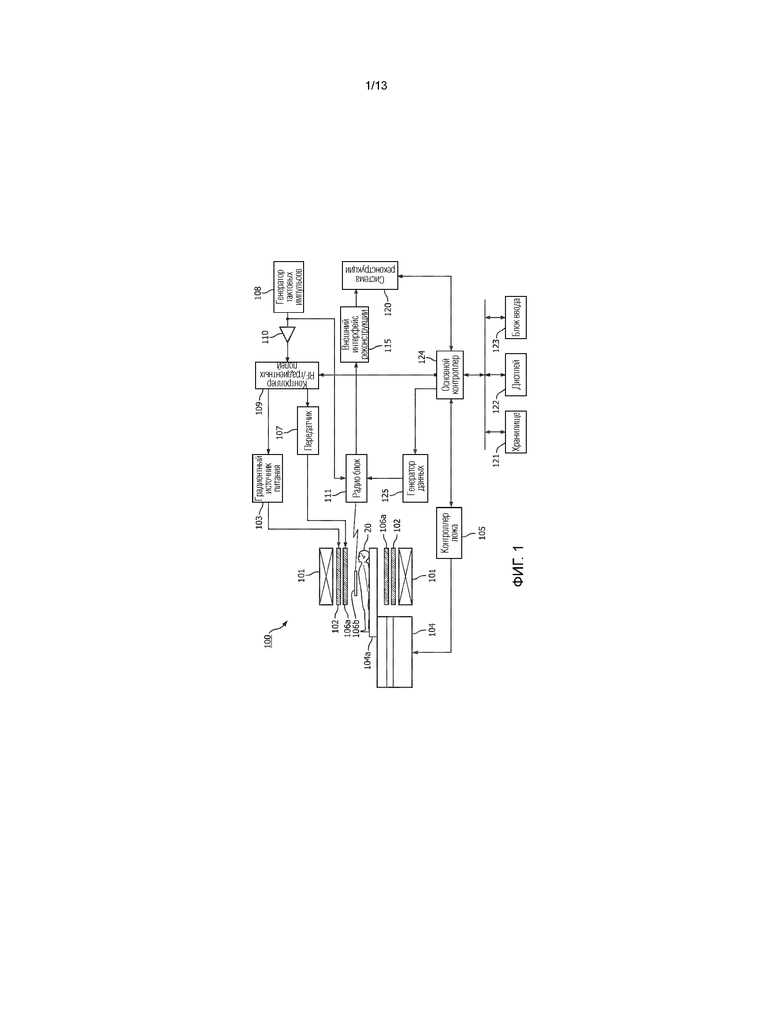
Фиг. 1 иллюстрирует примерный вариант осуществления системы 100 магнитно-резонансной томографии (МРТ).
Система 100 МРТ включает в себя статический магнит 1, градиентную катушку 2, градиентный источник 103 питания, стол или ложе 104 пациента, контроллер 105 стола пациента, блок 106a РЧ катушек, беспроводную РЧ станцию 106b, передатчик 107, генератор 108 тактовых импульсов, контроллер 109 РЧ/градиентных полей, драйвер 110, радиоблок 111, внешний интерфейс 115 реконструкции, систему 120 реконструкции, хранилище 121, дисплей 122, блок 123 ввода, основной контроллер 124 и генератор 125 данных.
В некоторых вариантах осуществления компоненты отличные от беспроводной РЧ станции 106b включены в основной блок, отдельный от беспроводной РЧ станции 106b. Более того, основной блок может быть разделен на гентри и систему обработки. В данном случае, например, статический магнит 101, градиентная катушка 102, градиентный источник 103 питания, стол 104 пациента, контроллер 105 стола пациента, блок 106a РЧ катушек, передатчик 107, контроллер 109 РЧ/градиентных полей и радиоблок 111 могут быть предусмотрены в гентри, тогда как генератор 108 тактовых импульсов, драйвер 110, внешний интерфейс 115 реконструкции, система 120 реконструкции, хранилище 121, дисплей 122, блок 123 ввода и основной контроллер 124 могут быть предусмотрены в системе обработки.
Статический магнит 101 имеет полую цилиндрическую форму и генерирует однородное статическое магнитное поле в его внутреннем пространстве. Например, постоянный магнит или сверхпроводящий магнит используется в качестве статического магнита.
Градиентная катушка 102 имеет полую цилиндрическую форму и располагается внутри статического магнита 101. Градиентная катушка 102 может включать в себя сочетание трех видов катушек, соответствующих X, Y, Z осям, которые являются ортогональными друг другу. Градиентная катушка 102 генерирует градиентное магнитное поле с его интенсивностью наклоненной вдоль X, Y, Z осей, когда к трем видам катушек по-отдельности подаются токи от градиентного источника 103 питания. В дополнение, Z ось находится в том же самом направлении как, например, направление статического магнитного поля. Градиентные магнитные поля X, Y, Z осей соответствуют, например, градиентному магнитному полю Gs выбора среза, градиентному магнитному полю Ge фазового кодирования и градиентному магнитному полу Gr считывания, соответственно. Градиентное магнитное поле Gs выбора среза используется, чтобы определять заданное сечение томографии. Градиентное магнитное поле Ge фазового кодирования используется, чтобы менять фазу магнитно-резонансного сигнала в соответствии с пространственным положением. Градиентное магнитное поле Gr считывания используется, чтобы менять частоту магнитно-резонансного сигнала в соответствии с пространственным положением.
Субъект 20 вводится во внутреннее пространство (пространство томографии) градиентной катушки 102, будучи расположенным на верхней полке 104a стола 104 пациента. Стол 104 пациента перемещает верхнюю полку 104a в ее продольном направлении (правом-и-левом направлении на Фиг. 1) и вертикальном направлении под управлением контроллера 105 стола пациента. Обычно, стол 104 пациента инсталлирован так, что данное продольное направление является параллельным центральной оси магнита 101 статического поля.
Блок 106a РЧ катушек включает в себя одну или более катушек, которые содержатся в цилиндрическом корпусе. Блок 106a РЧ катушек располагается внутри катушки 102 градиентного магнитного поля. На блок 106a РЧ катушек подается высокочастотный импульс (РЧ импульс) от передатчика 107, чтобы генерировать высокочастотное магнитное поле.
РЧ станция 106b может быть смонтирована на верхней полке 104a, встроена в верхнюю полку 104a, или прикреплена к субъекту 20. В момент томографирования беспроводная РЧ станция 106b помещается в пространство томографии вместе с субъектом 20 и принимает или воспринимает магнитно-резонансный сигнал, испускаемый от субъекта 20, в качестве электромагнитных волн и в ответ на это создает цифровые данные, представляющие собой воспринятый магнитно-резонансный сигнал. Беспроводная РЧ станция 106b может включать в себя или быть прикреплена к одному, двум или более блокам принимающих РЧ катушек, которые могут включать в себя любой вид катушек для восприятия магнитно-резонансного сигнала, испускаемого от субъекта 20. Беспроводная РЧ станция 106b имеет функцию передачи беспроводным образом в качестве электрического сигнала, например, в качестве цифрового сигнала, цифровых данных, представляющих собой магнитно-резонансный сигнал, принятый от субъекта 20.
Передатчик 107 подает на блок 106a РЧ катушек РЧ импульс, соответствующий ларморовской частоте.
Генератор 108 тактовых импульсов генерирует первый тактовый сигнал с заданной частотой. Этот первый тактовый сигнал может быть использован в качестве тактового сигнала системы, который служит в качестве опорного для временной привязки всей работы системы 100 МРТ.
Контроллер 109 РЧ/градиентных полей меняет градиентные магнитные поля в соответствии с требуемой последовательностью импульсов под управлением основного контроллера 124 и управляет градиентным источником 103 питания и передатчиком так, что РЧ импульс может быть передан. В дополнение, контроллеру 109 РЧ/градиентных полей выдается первый тактовый сигнал после того, как уровень данного сигнала был надлежащим образом отрегулирован драйвером 110. Контроллер 109 РЧ/градиентных полей выполняет последовательность импульсов синхронно с данным первым тактовым сигналом.
Радиоблок 111 принимает магнитно-резонансный сигнал, который цифровым и беспроводным образом передается от беспроводной РЧ станции 106b. Радиоблок 111 цифровым образом демодулирует принятый цифровой магнитный резонансный сигнал, а затем выводит демодулированный сигнал на внешний интерфейс 115 реконструкции. Радиоблок 111 модулирует первый тактовый сигнал посредством сигнала данных, выводимого генератором 125 данных, и тем самым беспроводным образом передает сигнал данных вместе с первым тактовым сигналом в качестве первого сигнала передачи к РЧ станции 106b.
Внешний интерфейс 115 реконструкции подвергает магнитно-резонансный сигнал, выданный от радиоблока 111 управлению усиления, преобразованию частоты и квадратурному обнаружению. Внешний интерфейс 115 реконструкции дополнительно разворачивает амплитуду магнитно-резонансного сигнала, сжатую в беспроводной РЧ станции 106b.
Система 120 реконструкции реконструирует изображение субъекта 20 на основе по меньшей мере одного из магнитно-резонансных сигналов, обработанных во внешнем интерфейсе 115 реконструкции.
Хранилище 121 хранит разнообразные виды данных, такие как данные изображения, указывающие изображение, реконструированное в системе 120 реконструкции.
Дисплей 122 отображает изображение, реконструированное в системе 120 реконструкции или разнообразные виды информации, включая разнообразные виды рабочих экранов для пользователя, чтобы управлять системой 100 МРТ, под управлением основного контроллера 124. Любое подходящее дисплейное устройство, такое как жидкокристаллический дисплей, может быть использовано в качестве дисплея 22.
Блок 123 ввода принимает разнообразные команды и вводы информации от оператора системы 100 МРТ. Блок 123 ввода может включать в себя координатно-указательное устройство, такое как мышь или шаровой манипулятор, выбирающее устройство, такое как переключатель переключения режимов, и/или устройство ввода, такое как клавиатура.
Основной контроллер 124 имеет CPU, память и т.д., которые не показаны, и управляет всей системой 100 МРТ.
Генератор 125 данных генерирует сигнал данных для связи с РЧ станцией 106b через радиоблок 111 под управлением основного контроллера 124.
Общая работа системы МРТ или устройства хорошо известна и, вследствие этого, не будет повторяться здесь.
Беспроводная РЧ станция 106b опирается на внутренний тактовый генератор для корректной синхронизации с генератором тактовых импульсов системы МРТ. Тем не менее, из-за беспроводной природы беспроводных РЧ катушек и индуцируемого РЧ шума, часто сложно точно синхронизировать тактовый генератор приемника с тактовым генератором системы, используя обычные способы беспроводной связи.
В последующем обсуждении приводится ссылка на первую станцию связи и, в частности, первую станцию беспроводной связи, и вторую станцию связи, в частности вторую станцию беспроводной связи. В некоторых вариантах осуществления первая станция беспроводной связи может считаться базовой станцией, а вторая станция беспроводной связи может считаться удаленной или мобильной станцией. В некоторых вариантах осуществления части основного блока системы 100 МРТ, включая, в частности, блок 106a РЧ катушек, передатчик 107, радиоблок 111, генератор 108 тактовых импульсов, драйвер 110, и основной контроллер 124, могут соответствовать первой станции беспроводной связи, описываемой ниже, а беспроводная РЧ станция 106b может соответствовать второй станции беспроводной связи, описываемой ниже.
От систем МРТ требуется обеспечение экосистемы, которая может сосуществовать с медицинским учреждением, которая является стабильной и хорошо управляемой, чтобы функционировать надлежащим образом и не быть помехой для других электромагнитных устройств. Это из-за очень чувствительной природы слабого сигнала от пациента и сильного передатчика МРТ. Эти требования создают потребность в том, чтобы системы МРТ располагались внутри ограниченной и замкнутой РЧ экранированной комнаты. Местоположение МРТ и экосистема требуют особых и необычных условий для беспроводной связи. Протокол беспроводной связи должен обеспечивать высокий уровень качества услуги в рамках среды с непредсказуемыми условиями МРТ, которые состоят из высокомощных побочных излучений, плотного состояния многолучевого канала с большой вариацией распространения сигнала по положению, частоте и времени без влияния на сигнал МРТ или отношение сигнала-к-шуму (SNR).
Для преодоления одной или более из этих проблем в некоторых вариантах осуществления первая станция беспроводной связи основного блока системы 100 МРТ может осуществлять связь с беспроводной РЧ станцией 106b в соответствии с протоколом связи, который является совместимым с стандартом для сверхширокополосной (UWB) связи, в которой модулированный сигнал с фазовой манипуляцией (PSK) и коротким импульсом (например, менее нескольких наносекунд) разбросан по широкому спектру. Данная технология UWB с коротким импульсом также может именоваться UWB прямой последовательности (DS-UWB) или UWB импульсного радио (IR-UWB). В отличие от традиционной узкополосной технологии (Bluetooth, WiFi, и т.д.) или UWB с ортогональным мультиплексированием с частотным разделением (OFDM-UWB), на которые в значительной степени влияют условия распространения сигнала, импульсная UWB преуспевает в многолучевых средах, таких как те, что можно обнаружить в комнате МРТ. Здесь понимается, что UWB означает передачу с полосой пропускания больше 500 МГц для заданной маски испускания мощности, что для PSK UWB с коротким импульсом означает, что энергия на бит (Eb) имеет коэффициент разброса равный полосе пропускания канала больше 500 МГц. Так как Eb разбрасывается по всему UWB каналу, присутствует затухание с нулевым средним. Короткий импульс также получает выгоду от временной привязки отраженной задержки прохождения, которая больше чем период передачи. Функция плотности вероятности для каналов UWB с коротким импульсом может быть выше, чем производительность в свободном пространстве в многолучевой среде. Коэффициент разброса и лимиты испускания также означают, что UWB с коротким импульсом имеет низкую вероятность помех и перехвата, что требуется для сосуществования в среде, где генерируется устойчивая частота МРТ и гармонические следы. Стандарт UWB допускает передачи в диапазоне частот от 3,1 ГГц до 10,6 ГГц, что допускает строгие частоты, которые используются, чтобы быть выбранными, чтобы избегать сильно перегруженного спектра, подобного 2,4 ГГц и 5,8 ГГц.
Одной из проблем тактовой синхронизации в беспроводной связи системы МРТ являются вариации по времени задержки распространения по беспроводном сигналу тактовой синхронизации. Такие временные вариации могут быть вызваны перемещением пациента, стола пациента или обслуживающего персонала внутри комнаты МРТ.
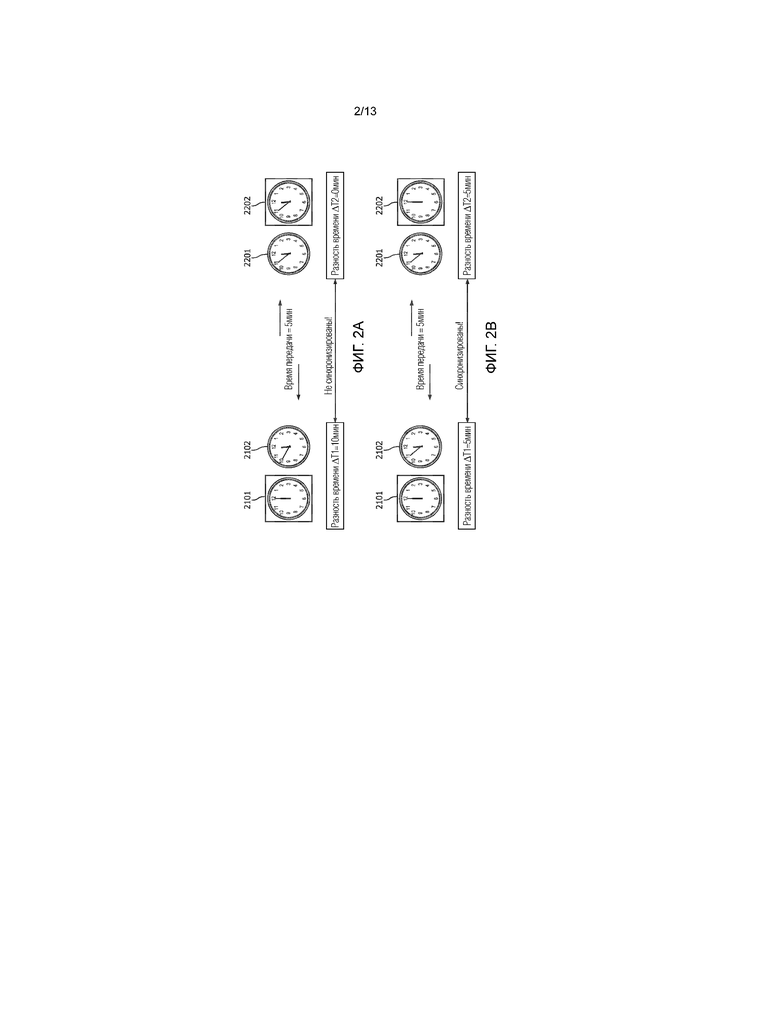
Фиг. 2A и 2B показывают простой пример, чтобы подчеркнуть проблемы тактовой синхронизации, используя изменение сигналов со скоростью света. В частности, Фиг. 2A иллюстрирует пример сигналов локальных тактовых генераторов 2101 и 2202 на двух станциях связи, которые не синхронизированы, а Фиг. 2B иллюстрирует пример сигналов локальных тактовых генераторов 2101 и 2202, которые синхронизированы. Здесь предполагается, что локальный тактовый генератор 2101 является (первым) локальным тактовым генератором первой станции связи (например, базовой станции), а второй локальный тактовый генератор 2202 является (вторым) локальным тактовым генератором второй станции связи (например, удаленной или мобильной станции), и временная привязка локального тактового генератора 2202 может управляться или упорядочиваться второй станцией связи на основании временной привязки сигнала, принимаемого на второй станции связи от первой станции связи.
В данном примере два рассматриваемых тактовых генератора 2101 и 2202 помещены на расстоянии пяти световых минут. Это может быть, например, случаем, если один тактовый генератор будет помещен на Земле, а другой тактовый генератор на орбите Марса. Данный пример можно легко масштабировать к среде МРТ посредством замены «минут» на «наносекунды», поскольку свет проходит около 30 см за наносекунду, а длина беспроводного канала в среде МРТ будет порядка 30 см - 3 м.
Фиг. 2A показывает пример, где сигнал локального тактового генератора 2201 на первой станции связи и восстановленный сигнал тактового генератора 2102, восстановленный из сигнала, принятого первой станцией связи от второй станции связи, отличаются на 10 минут, тогда как сигнал локального тактового генератора 220 на второй станции связи и восстановленный сигнал тактового генератора 2102, восстановленный из сигнала, принимаемого второй стацией связи от первой станции связи, являются совершенно выставленными. Так как мы знаем, что задержка распространения канала составляет 5 минут, мы можем сделать вывод о том, что локальные тактовые сигналы 2101 и 2202 не синхронизированы.
Фиг. 2B показывает пример, где разность между сигналом локального тактового генератора 2101 и восстановленным сигналом тактового генератора 2102 на первой станции связи, и разность между сигналом локального тактового генератора 2202 и восстановленным сигналом тактового генератора 2201 на второй станции связи, обе составляют пять минут, что эквивалентно задержке распространения. Может быть легко показано, что два сигнала тактовых генераторов 2101 и 2202 являются синхронизированными и будут оставаться синхронизированными, если разность времени, измеренная в обоих местоположениях, является идентичной, при условии, что задержка распространения канала является постоянной или меняющейся со скоростью, которая много ниже скоростей обновления тактовых генераторов.
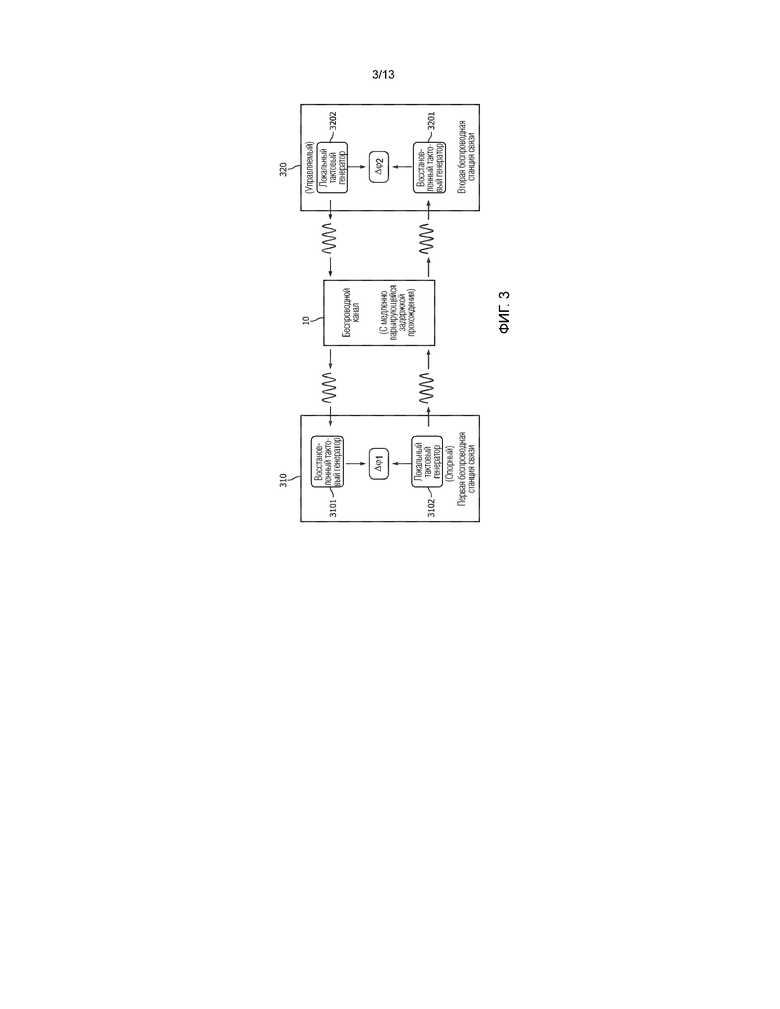
Фиг. 3 является чертежом для иллюстрации условий синхронизации сигнала тактового генератора между первой и второй станциями 310 и 320 беспроводной связи, осуществляющими связь по беспроводному каналу 10 с медленно варьирующейся задержкой прохождения. В частности, как показано на Фиг. 3, первая станция 310 беспроводной связи (например, основная или базовая станция) имеет (первый) сигнал локального тактового генератора 2102 и восстановленный сигнал тактового генератора 2101, который восстанавливается из сигнала, принимаемого первой станцией 310 связи от второй станции 320 связи, и с разностью Δϕ1 фаз между первым сигналом локального тактового генератора 2102 и восстановленным сигналом тактового генератора 2101. Вторая станция 320 беспроводной связи (например, удаленная или мобильная станция) имеет (второй) сигнал локального тактового генератора 2202 и восстановленный сигнал тактового генератора 2201, который восстанавливается из сигнала, принимаемого второй станцией 320 связи от первой станции 310 связи, с разностью Δϕ2 фаз между вторым сигналом локального тактового генератора 2202 и восстановленным сигналом тактового генератора 2201. Сигналы тактовых генераторов 2101, 2202, 2102 и 2201 являются синхронизированными, когда Δϕ1=Δϕ2.
Для решения проблем синхронизации сигнала локального тактового генератора второй станции беспроводной связи (например, РЧ станции 106b системы 100 МРТ) с сигналом локального тактового генератора первой станции беспроводной связи (например, основного блока системы МРТ, включающей в себя блок 106a РЧ катушек, передатчик 107, радиоблок 111, генератор 108 тактовых импульсов, драйвер 110, и основной контроллер 124), первая станция беспроводной связи и/или вторая станция беспроводной связи могут использовать отслеживание фазы несущей частоты, чьи варианты осуществления описываются ниже. Здесь, отслеживание фазы несущей частоты относится к способу измерения и отслеживания фазы восстановленной несущей частоты для принятого беспроводного сигнала. Измерение фазы может быть установлено посредством сравнения фазы восстановленной несущей частоты с локальным опорным сигналом, который является синхронным с сигналом локального тактового генератора, и вследствие этого с локальным временем. Локальный опорный сигнал, в свою очередь, используется, чтобы генерировать несущую частоту для соответствующего сигнала передачи. Преимущественно это выполняется как для первой станции беспроводной связи, так и второй станции беспроводной связи.
Посредством непрерывного отслеживания фазы несущей частоты, как в первой, так и второй станциях беспроводной связи и обмена сообщениями с информацией о фазе, можно регулировать фазу одного локального опорного сигнала, преимущественно второй станции беспроводной связи, так что измерение фазы несущей частоты, как в первой, так и второй станциях беспроводной связи дает один и тот же результат. Как только измерения фазы несущей частоты, как в первой, так и второй станциях беспроводной связи дает один и тот же результат в рамках требуемой цели точности или пороговой величины, тогда сигналы тактовых генераторов считаются синхронизированными.
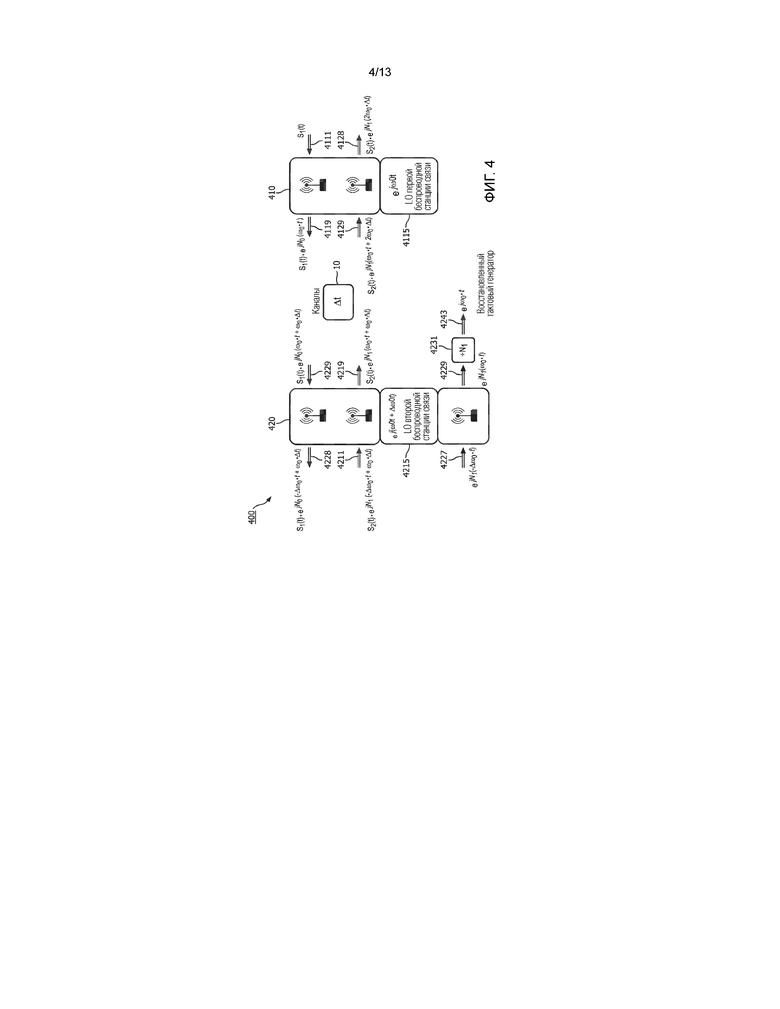
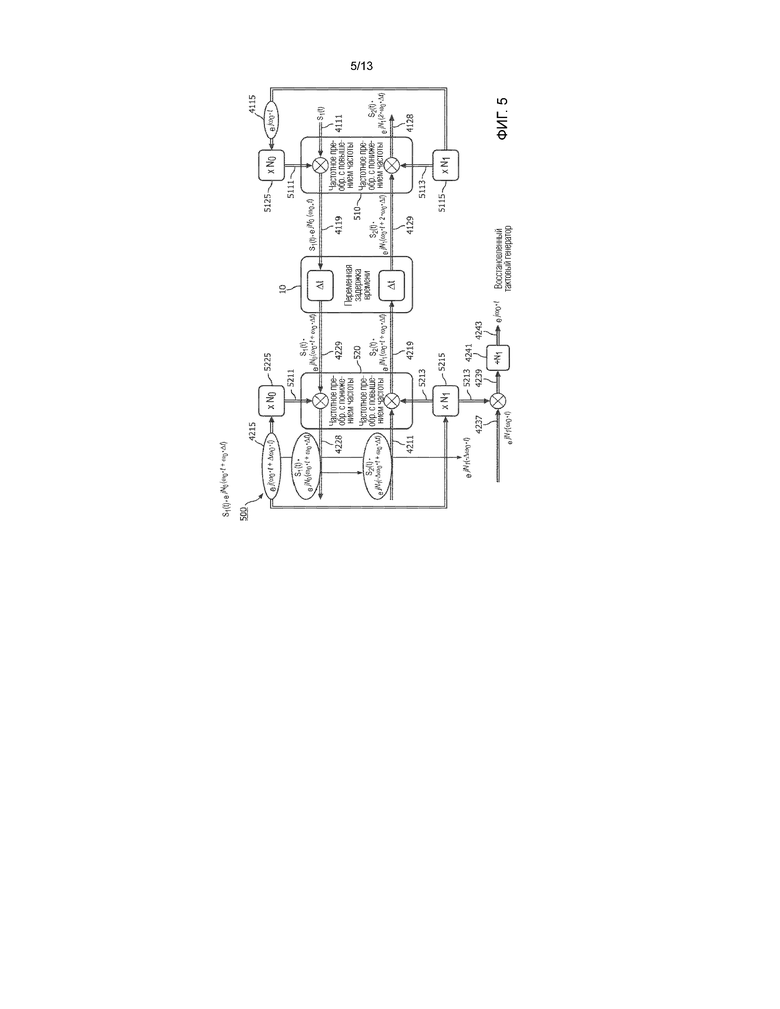
Фиг. 4 показывает концептуальную схему, иллюстрирующую процесс синхронизации фазы несущей частоты в системе 400 беспроводной связи, которая включает в себя первую и вторую станции 410 и 420 беспроводной связи, которые осуществляют связь по беспроводному каналу 10. Фиг. 5 показывает более детальную функциональную структурную схему, иллюстрирующую компоновку для синхронизации фазы несущей частоты в системе 500 беспроводной связи, которая включает в себя первую и вторую станции 510 и 520 беспроводной связи. Система 500 беспроводной связи может быть одним вариантом осуществления системы 400 беспроводной связи.
Первая станция 410 беспроводной связи имеет первый гетеродин 4115, который выводит сигнал ejω0⋅t, а вторая станция 420 беспроводной связи включает в себя второй гетеродин 4215, который выводит сигнал ej(ω0⋅t+Δω0⋅t). Т.е., в целом, присутствует разность Δω0 частот между первой частотой (ω0) Г первого Г 4115 и второй частотой (ω0+Δω0) Г второго Г 4215.
Во время работы первая станция 410 беспроводной связи обрабатывает первый сигнал 4111 основной полосы частот (S1(t)), включающий в себя данные, которые должны быть сообщены второй станции 420 беспроводной связи, чтобы создавать первый сигнал 4119 передачи (S1(t)⋅ejN0(ω0⋅t)), который первая станция 410 беспроводной связи передает по беспроводному каналу 10. Преимущественно, часть первого сигнала 4111 основной полосы частот может быть последовательностью синхронизации (например, кодом Баркера), шаблон которой известен априори второй станции 420 беспроводной связи. Другая часть первого сигнала 4111 основной полосы частот содержит информацию о разности фазы несущей частоты, измеренной первой станцией 410 беспроводной связи.
В системе 500 беспроводной связи первая станция 510 беспроводной связи преобразует с повышением частоты первый сигнал 4111 основной полосы частот с помощью первого несущего сигнала 5111, который имеет первую несущую частоту, которая является произведением первого значения 5125 (например, N0) и первой частоты ω0 Г первого Г 4115, чтобы создавать первый сигнал 4119 передачи. Преимущественно, первый несущий сигнал 5111 с первой несущей частотой (N0⋅ω0) является синхронным с первым Г 4115.
Первый сигнал 4119 передачи задерживается на задержку Δt распространения по беспроводному каналу 10 и принимается второй станцией 420 беспроводной связи в качестве первого сигнала 4229 передачи с задержкой (S1(t)⋅ejN0(ω0⋅t+ω0⋅Δt)). В ответ на прием первого сигнала 4229 передачи с задержкой вторая станция 420 беспроводной связи создает восстановленный сигнал 4228 основной полосы частот (S1(t)⋅ejN0((-Δω0⋅t+ω0⋅Δt)).
В системе 500 беспроводной связи вторая станция 520 беспроводной связи преобразует с понижением частоты принятый первый сигнал 4229 передачи с задержкой с помощью сигнала 5211 преобразования с понижением частоты с частотой, которая является произведением первого значения 5225 (например, N0) и второй частоты (ω0+Δω0) Г второго Г 4215, чтобы создать восстановленный сигнал 4228 основной полосы частот.
Здесь может быть видно, что восстановленный сигнал 4228 основной полосы частот включает в себя информацию, идентифицирующую разность Δω0 частот между первой частотой Г первого Г 4115 и второй частотой Г второго Г 4215, и временную задержку Δt через беспроводной канал 10. Данная информация может быть использована, чтобы обеспечивать коррекцию разности Δω0 частот и задержки Δt времени, чтобы синхронизировать второй Г 4215 и первый Г 4115, как объясняется ниже.
Вторая станция 420 беспроводной связи умножает второй сигнал S2(t) основной полосы частот на сигнал (ejN1(-Δω0⋅t+ω0⋅Δt)) коррекции, чтобы создавать скорректированный второй сигнал 4211 основной полосы частот (S2(t)⋅ ejN1(-Δω0⋅t+ω0⋅Δt)). Здесь видно, что частота и фаза сигнала коррекции являются масштабированными кратными разности Δω0 частот между первой частотой Г первого Г 4115 и второй частотой Г второго Г 4215, и временной задержки Δt через беспроводной канал 10, соответственно, которые присутствуют в восстановленном сигнале 4228 основной полосы частот. Преимущественно, часть второго сигнала S2(t) основной полосы частот может быть последовательностью синхронизации (например, кодом Баркера), шаблон которой известен априори первой станции 410 беспроводной связи. В некоторых вариантах осуществления второй сигнал S2(t) основной полосы частот может быть восстановленной и очищенной версией первого сигнала S1(t) основной полосы частот. Наличие идентичного контента сообщения в S1(t) и S2(t), допускает оценку разрядной ошибки на первой станции 410 беспроводной связи. Это выполняется посредством сравнения контента сообщения S2(t) у принятого сигнала с контентом сообщения S1(t) у сигнала, переданного первой станцией 410 беспроводной связи.
В ответ на скорректированный второй сигнал 4211 основной полосы частот вторая станция 420 беспроводной связи создает второй сигнал 4219 передачи (S2(t)⋅ ejN1(ω0⋅t+ω0⋅Δt)), который вторая станция 420 беспроводной связи передает по беспроводному каналу 10.
В системе 500 беспроводной связи вторая станция 520 связи преобразует с повышением частоты скорректированный второй сигнал 4211 основной полосы частот с помощью второго несущего сигнала 5213 с частотой, которая является произведением второго значения 5215 (например, N1) и второй частоты (ω0+Δω0) Г второго Г 4115, чтобы создать второй сигнал 4219 передачи. Преимущественно, второй несущий сигнал 5213 со второй несущей частотой (N1⋅(ω0+Δω0)) является синхронным со вторым Г 4215.
В результате данного процесса второй сигнал 4219 передачи имеет вторую несущую частоту (N1⋅ω0) передачи, которая является произведением второго значения (N1) и первой частоты ω0 Г, и которая является синхронной по частоте с первым Г 4115. Тем не менее, второй сигнал 4219 передачи также имеет смещение фазы (N1⋅ω0⋅Δt) из-за канала 10. Поскольку данное смещение фазы будет варьироваться по времени, его по-прежнему необходимо оценивать и компенсировать. Пример способа для данной коррекции смещения фазы будет описан далее.
Второй сигнал 4219 передачи имеет задержку на задержку Δt распространения по беспроводному каналу 10 и принимается первой станцией 410/510 беспроводной связи в качестве второго сигнала 4129 передачи с задержкой (S2(t)⋅ ejN1(ω0⋅t+2⋅ω0⋅Δt)). В ответ на принятый второй сигнал 4129 передачи с задержкой первая станция 410/510 беспроводной связи создает восстановленный сигнал 4128 основной полосы частот (S1(t)⋅ ejN1(2⋅ω0⋅Δt)).
В системе 500 беспроводной связи первая станция 510 беспроводной связи преобразует с понижением частоты принятый второй сигнал 4129 передачи с задержкой с помощью сигнала 5113 преобразования с понижением частоты с частотой, которая является произведением второго значения 5115 (например, N1) и первой частоты ω0 Г первого Г 4115, чтобы создать восстановленный сигнал 4128 основной полосы частот.
Здесь может быть видно, что восстановленный сигнал 4128 основной полосы частот включает в себя информацию, идентифицирующую временную задержку Δt через беспроводной канал 10. Данная информация может быть использована, чтобы обеспечивать коррекцию фазы несущей частоты первого Г 4115 и/или второго Г 4215, чтобы синхронизировать гетеродины и тактовые генераторы первой и второй станций 410/510 и 420/520 беспроводной связи друг с другом. Например, в некоторых вариантах осуществления вторая станция 420/520 беспроводной связи может регулировать фазу ее собственного гетеродина и тактового генератора, чтобы учитывать задержку Δt распространения по беспроводному каналу 10. В некоторых вариантах осуществления вторая станция 420/520 беспроводной связи может передавать сигнал, такой как импульс синхронизации или данные временной привязки, к первой станции 410/510 беспроводной связи, чтобы заставить первую станцию 410/510 беспроводной связи учитывать задержку Δt распространения по беспроводному каналу 10.
Информация касательно задержки Δt распространения и/или смещения фазы несущей частоты Δt⋅ω0 может быть добавлена в качестве контента сообщения в первый сигнал 4111 основной полосы частот (S1(t)) и отправлена от первой станции 410/510 беспроводной связи ко второй станции 420/520 беспроводной связи. После приема информации касательно задержки Δt распространения и/или смещения фазы несущей частоты Δt⋅ω0 на второй беспроводной станции 420/520 связи вторая станция 420/520 беспроводной связи может формировать третий сигнал 4237 основной полосы частот (ejN1(-ω0⋅Δt)). Вторая станция 420/520 беспроводной связи затем может преобразовывать с повышением частоты третий сигнал 4237 основной полосы частот с помощью второго несущего сигнала 5213 с частотой, которая является произведением второго значения 5215 (например, N1) и второй частоты (ω0+Δω0) Г второго Г 4115, чтобы создавать только несущий третий сигнал 4239 передачи (ejN1(ω0⋅t)). Только несущий третий сигнал 4239 передачи имеет частоту, которая является строго N1 кратной частотой первого Г 4115 первой станции 510 беспроводной связи. Используя делитель 4241 (предварительный делитель) частоты с отношением N1, восстановленный тактовый сигнал 4243 (ejω0⋅t) с той же самой частотой и фазой, что у первого Г 4115 первой станции 410/510 беспроводной связи, может быть восстановлен второй станцией 420/520 беспроводной связи без какого-либо смещения частоты из-за Г у второй станции 420/520 беспроводной связи и также без какого-либо переменного смещения фазы из-за переменной задержки Δt распространения беспроводного канала 10.
Отслеживание фазы несущей частоты как описано выше допускает синхронизацию сигнала тактового генератора между удаленно расположенными станциями беспроводной связи, но обеспечивает только относительное измерение времени и синхронизацию. Дальнейшим улучшением способа является использование известной последовательности псевдослучайных чисел (ПСЧ) в качестве потока данных. Посредством применения сходного способа отслеживания фазы к последовательности ПСЧ (также именуемого здесь «отслеживанием фазы кода»), может быть произведено измерение абсолютного времени, и абсолютное время тактового генератора может быть синхронизировано между двумя станциями беспроводной связи.
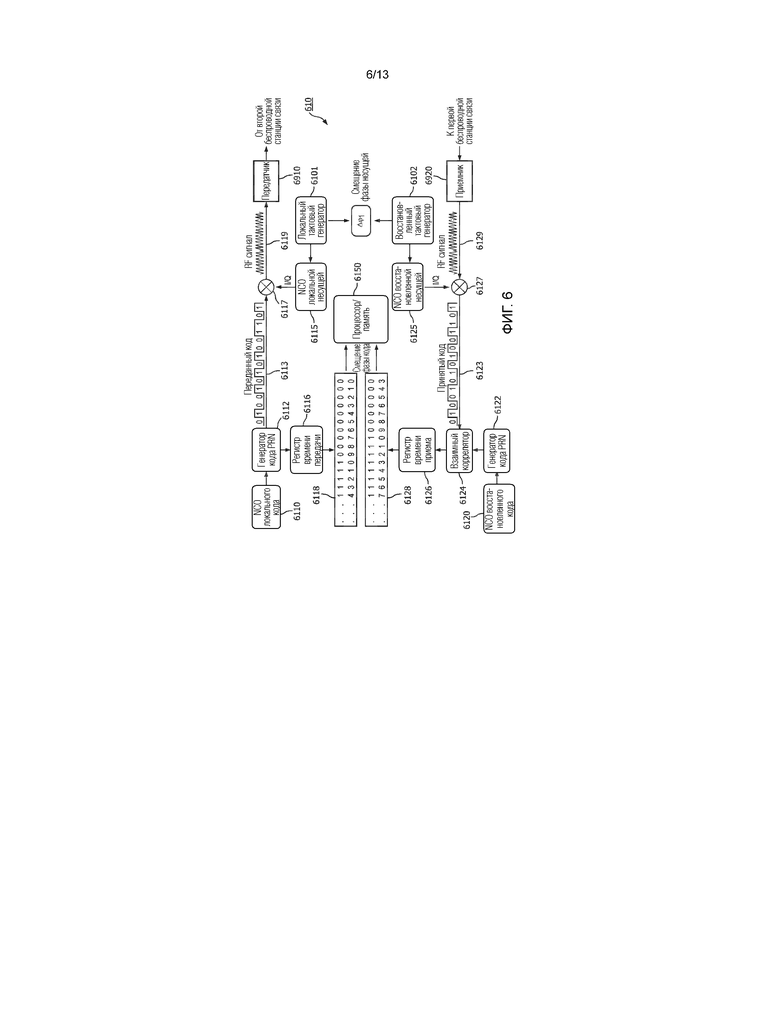
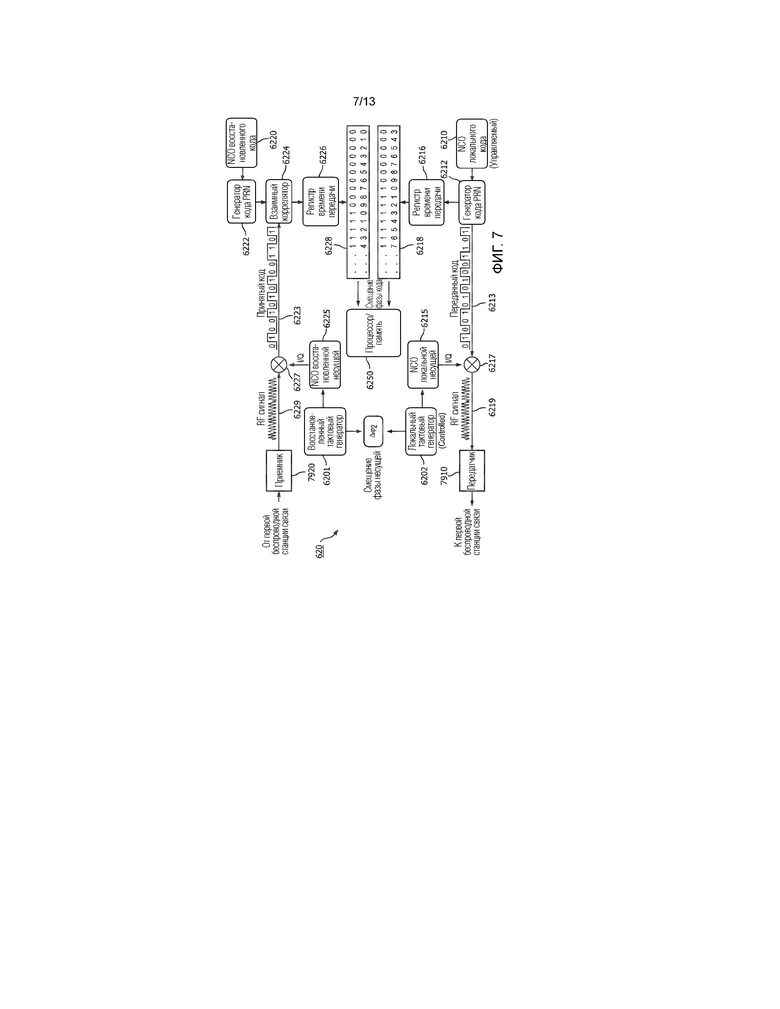
Фиг. 6 показывает функциональную структурную схему системы управления тактового генератора для первой станции 610 связи, например, главной или базовой станции, а Фиг. 7 показывает функциональную структурную схему системы управления тактового генератора для второй станции 620 связи, например, удаленной или мобильной станции, которая может осуществлять связь беспроводным образом с первой станцией 610 связи. Первая станция 610 связи может быть одним вариантом осуществления первой станции 310, 410 и/или 510 связи с Фиг. 3, 4 и 5. Первая станция 610 связи может быть одним вариантом осуществления станции беспроводной связи основного блока системы 100 МРТ, включающего в себя генератор 108 тактовых импульсов. Вторая станция 620 связи может быть одним вариантом осуществления второй станции 320, 420 и/или 520 связи с Фиг. 3, 4 и 5. Вторая станция 620 связи может быть одним вариантом осуществления РЧ станции 106b системы 100 МРТ.
Первая станция 610 связи включает в себя: (первый) локальный тактовый генератор 6101, второй тактовый генератор 6102 с восстановленным сигналом, генератор 6110 с цифровым управлением (NCO) локального кода, первый генератор 6112 кода ПСЧ передачи, NCO 6115 локальной несущей частоты, регистр 6116 времени передачи, смеситель 6117 передачи или преобразования с повышением частоты, регистр 6118 последовательности ПСЧ передачи, NCO 6120 восстановленного кода, второй генератор 6122 восстановленного кода ПСЧ, кросс-коррелятор 6124, NCO 6125 восстановленной несущей частоты, регистр 6126 времени приема, смеситель 6127 приема или преобразования с понижением частоты, регистр 6128 принятой последовательности ПСЧ, процессор 6150, который связан с памятью, передатчик 6910 и приемник 6920.
Во время работы (первый) генератор 6112 кода ПСЧ передачи генерирует первую последовательность 6113 ПСЧ передачи из известного полинома-генератора, основанного на временной привязке NCO 6110 локального кода, который в свою очередь синхронизирован с локальным тактовым генератором 6101. Регистр 6116 времени передачи сохраняет время передачи первой последовательности 6113 ПСЧ передачи, и первая последовательность 6113 ПСЧ передачи сохраняется в регистре 6118 кода ПСЧ передачи. Смеситель 6117 передачи смешивает первую последовательность 6113 ПСЧ передачи с локальной несущей частотой, сгенерированной NCO 6115 локальной несущей частоты в синхронизации с локальным тактовым генератором 6101, и выводит первый сигнал 6119 передачи, который должен быть передан передатчиком 6910 на вторую станцию 620 беспроводной связи по беспроводному каналу. Между тем, приемник 6920 принимает сдвинутый по фазе второй сигнал 6129 передачи, содержащий второй сигнал передачи, принятый по беспроводному каналу от второй станции 620 беспроводной связи, с его фазой, сдвинутой на второй фазовый сдвиг канала, который зависит от временной задержки беспроводного канала. Смеситель 6127 приема смешивает принятый сдвинутый по фазе второй сигнал 6129 передачи с сигналом преобразования с понижением частоты, сгенерированным NCO 6125 восстановленной несущей частоты в синхронизации со вторым тактовым генератором 6102 с восстановленным сигналом, и выводит принятую последовательность 6123 ПСЧ, которая была создана на второй станции 620 беспроводной связи из точно такого же известного полинома-генератора, который был использован первой станцией 610 беспроводной связи, чтобы генерировать первую последовательность 6113 ПСЧ передачи. Кросс-коррелятор 6124 осуществляет корреляцию принятой последовательности ПСЧ с последовательностью ПСЧ, сгенерированной вторым генератором 6122 кода ПСЧ, основанной на временной привязке NCO 6120 восстановленного кода, который в свою очередь синхронизирован со вторым тактовым генератором 6102 с восстановленным сигналом. Регистр 6126 времени приема сохраняет время приема принятой последовательности 6123 ПСЧ и принятая последовательность 6123 ПСЧ сохраняется в регистре 6128 последовательности.
Процессор 6150 может сравнивать временную привязку последовательности 6113 ПСЧ передачи с временной привязкой принятой последовательности 6123 ПСЧ, чтобы определять ошибку фазового сдвига кода между первой станцией 610 беспроводной связи и второй станцией 620 беспроводной связи.
Вторая станция 620 связи включает в себя: (второй) локальный тактовый генератор 6202 с восстановленным сигналом, второй тактовый генератор 6201, генератор 6210 с цифровым управлением (NCO) локального кода, (первый) генератор 6212 кода ПСЧ передачи, NCO 6215 локальной несущей частоты, регистр 6216 времени передачи, смеситель 6217 передачи или преобразования с повышением частоты, регистр 6218 последовательности ПСЧ передачи, NCO 6220 восстановленного кода, второй генератор 6222 восстановленного кода ПСЧ, кросс-коррелятор 6224, NCO 6225 восстановленной несущей частоты, регистр 6226 времени приема, смеситель приема или преобразования с понижением частоты, регистр 6228 принятой последовательности ПСЧ, процессор 6250 со связанной памятью, передатчик 7910 и приемник 7920.
Во время работы (второй) генератор 6212 кода ПСЧ передачи генерирует вторую последовательность 6213 ПСЧ передачи на основании временной привязки NCO 6210 локального кода, который в свою очередь синхронизирован с локальным тактовым генератором 6202. Регистр 6216 времени передачи сохраняет время передачи первой последовательности 6213 ПСЧ передачи и первая последовательность 6213 ПСЧ передачи сохраняется в регистре 6218 кода ПСЧ передачи. Смеситель 6217 передачи смешивает вторую последовательность 6213 ПСЧ передачи с локальной несущей частоты, сгенерированной NCO 6215 локальной несущей частоты в синхронизации с локальным тактовым генератором 6201, и выводит второй сигнал 6219 передачи, который должен быть передан передатчиком 7910 на первую станцию 610 беспроводной связи по беспроводному каналу. Между тем, приемник 7920 принимает сдвинутый по фазе второй сигнал 6229 передачи, содержащий первый сигнал 6119 передачи, принятый по беспроводному каналу от первой станции 610 беспроводной связи с его фазой, сдвинутой на первый фазовый сдвиг канала, который зависит от временной задержки беспроводного канала. Смеситель 6227 приема смешивает принятый сдвинутый по фазе первый сигнал 6129 передачи с сигналом преобразования с понижением частоты, сгенерированным NCO 6225 восстановленной несущей частоты в синхронизации с первым тактовым генератором 6201 с восстановленным сигналом, и выводит принятую последовательность 6223 ПСЧ. Кросс-коррелятор 6224 осуществляют корреляцию принятой последовательности 6223 ПСЧ с последовательностью ПСЧ, сгенерированной вторым генератором 6222 кода ПСЧ на основании временной привязки NCO 6220 восстановленного кода, который в свою очередь синхронизирован с первым тактовым генератором 6201 с восстановленным сигналом. Регистр 6226 времени приема сохраняет время приема принятой последовательности 6223 ПСЧ и принятая последовательность 6223 ПСЧ сохраняется в регистре 6228 последовательности.
Процессор 6250 может сравнивать временную привязку последовательности 6213 ПСЧ передачи с временной привязкой принятой последовательности 6223 ПСЧ, чтобы определять ошибку фазового сдвига кода между первой станцией 610 беспроводной связи и второй станцией 620 беспроводной связи.
В некоторых вариантах осуществления, как первая, так и вторая станции 610 и 620 беспроводной связи отслеживают разность фазы несущей частоты и фазы кода между как первой, так и второй станциями 610 и 620 беспроводной связи. В некоторых вариантах осуществления может осуществляться обмен сообщениями между первой и второй станциями 610 и 620 беспроводной связи, чтобы корректировать любое отклонение фазы несущей частоты и/или фазы кода. В некоторых вариантах осуществления одна беспроводная станция связи, например, первая станция 610 беспроводной связи (которая может быть вариантом осуществления станции беспроводной связи основного блока системы 100 МРТ, включающего в себя генератор 108 тактовых импульсов), будет служить в качестве опорной по тактовому импульсу, а другая станция, например, вторая станция 620 беспроводной связи (которая может быть одним вариантом осуществления РЧ станции 106b системы 100 МРТ), будет регулировать ее локальный тактовый генератор и фазу кода в соответствии с сообщениями, обмен которыми осуществляется.
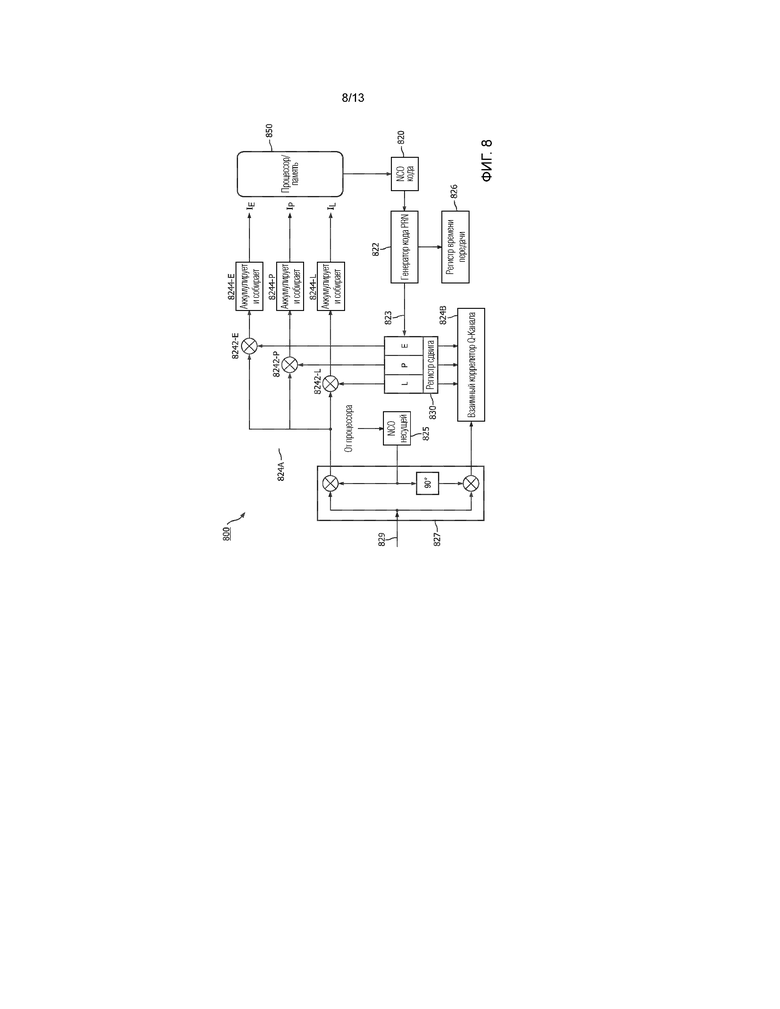
Как объяснялось выше, как первая, так и вторая станции 610 и 620 беспроводной связи могут генерировать одну и ту же последовательность ПСЧ из известного полинома-генератора. Сравнение локально сгенерированной строки символов ПСЧ с принятой строкой посредством блока кросс-корреляции обеспечивает точное выставление фазы между принятой последовательностью ПСЧ и локально сгенерированной последовательностью ПСЧ. Как только найдена фаза кода, принятый код ПСЧ может быть отслежен с помощью компоновки, показанной на Фиг. 8.
Фиг. 8 показывает функциональную структурную схему компоновки 800 для выставления фазы между принятым кодом псевдослучайного шума (ПСЧ) и локально сгенерированным кодом ПСЧ. В некоторых вариантах осуществления компоновка 800 может быть включена в первую станцию 610 беспроводной связи и/или вторую станцию 610 беспроводной связи. Компоновка 800 включает в себя NCO 820 кода, генератор 822 кода ПСЧ, кросс-коррелятор 824A I-Канала, кросс-коррелятор 824B Q-канала, NCO 825 восстановленной несущей частоты, регистр 826 времени передачи, преобразователь 827 с понижением частоты, регистр 830 сдвига и процессор 850 со связанной памятью.
Кросс-коррелятор 824A I-Канала включает в себя умножители 8242-L, 8242-P, и 8242-E и элементы 8244-L, 8244-P, и 8244-E аккумулирования-и-сброса. Кросс-коррелятор 824B Q-Канала может иметь конфигурацию точно такую же, как у кросс-коррелятора 824A I-Канала.
В некоторых вариантах осуществления процессор 850 со связанной памятью может содержать процессор 6150 и связанную память или процессор 6250 и связанную память.
Во время работы преобразователь 827 с понижением частоты принимает по беспроводному каналу сигнал 829 приема, который включает в себя последовательность ПСЧ, сгенерированную на другом терминале беспроводной связи. Преобразователь с понижением частоты принимает сигнал преобразования с понижением частоты от NCO 825 восстановленной несущей частоты и использует его, чтобы преобразовывать с понижением частоты принятый сигнал 829 в синфазный («I») и квадратурный («Q») сигналы основной полосы частот канала, которые подаются соответствующему кросс-коррелятору 824A I-Канала и кросс-коррелятору 824B Q-Канала. Между тем, генератор 822 восстановленного кода ПСЧ генерирует локальную последовательность 823 ПСЧ, которая подается в регистр 830 сдвига, и сохраняет время генерирования локальной последовательности 823 ПСЧ в регистре 826 времени передачи. Регистр сдвига создает три сдвинутые по времени копии последовательности 823 ПСЧ - одна раньше, одна немедленно, и одна позже - подает эти копии умножителям 8242-L, 8242-P, и 8242-E соответственно. Умножители 8242-L, 8242-P, и 8242-E умножают синфазный сигнал основной полосы частот канала от преобразователя 827 с понижением частоты с тремя сдвинутыми по фазе копиями последовательности 823 ПСЧ, чтобы создать три синфазных значения или результата корреляции, IE, IP и IL, которые подаются процессору 850. Сходным образом, кросс-коррелятор 824B Q-Канала осуществляет корреляцию квадратурного сигнала основной полосы пропускания канала от преобразователя с понижением частоты 827 с тремя сдвинутыми по времени копиями последовательности 823 ПСЧ, чтобы создать квадратурные значения или результаты корреляции, которые также подаются процессору 850.
Таким образом, в компоновке 800, входящий код ПСЧ в принятом сигнале 829 непрерывно сравнивается (т.е., коррелируется) с тремя локально сгенерированными копиями одной и той же последовательности 823 ПСЧ, одна раньше, одна немедленно, и одна позже. Если отрегулирована должным образом, то корреляция для немедленной копии последовательности 823 ПСЧ будет иметь значительно более высокое значение корреляции, чем корреляции для ранней и поздней копии. Кроме того, результаты корреляции для ранней и поздней последовательностей должны иметь примерно одно и то же абсолютное значение. Выходные сигналы из ранней, немедленной и поздней корреляции могут быть использованы, чтобы сгенерировать сигнал дискриминации, который подается в качестве обратной связи на локально восстановленную последовательность ПСЧ (например, Генератору 6122 Кода ПСЧ на Фиг. 6). Данная обратная связь будет гарантировать то, что восстановленная последовательность ПСЧ является синфазной с принятой последовательностью ПСЧ.
Как описано выше, в некоторых вариантах осуществления первая и вторая станции 610 и 620 беспроводной связи непрерывно генерируют две копии последовательности ПСЧ. Одна копия представляет собой последовательность ПСЧ восстановленную из потока принятого сигнала, другая копия представляет собой последовательность ПСЧ, которая передается соответствующей другой станции. Сходно с отслеживанием фазы несущей частоты отслеживание фазы кода требует того, что тактовые генераторы являются синхронными, если принятый и переданный коды ПСЧ на обоих концах имеют идентичные фазы.
Если присутствует разность в фазе кода между первой и второй станциями 610 и 620 беспроводной связи, тогда один конец будет регулировать фазу его передаваемой последовательности ПСЧ так, чтобы фазы кода были такими же, как для первой, так и второй станций 610 и 620 беспроводной связи. Как только первая и вторая станции 610 и 620 беспроводной связи синхронизированы и надлежащим образом отслеживают как фазу несущей частоты, так и фазу кода, тогда переданная последовательность ПСЧ как на той, так и на другой станциях может быть использована в качестве представления времени. В качестве примера, если предполагается, что последовательность ПСЧ имеет суммарную длину в 1 мс и каждый отдельный символ имеет продолжительность в 1 нс, тогда данная компоновка будет допускать измерения времени с разрешением 1 нс и периодичность тактового импульса в 1 мс. Более высокое разрешение времени может быть достигнуто посредством измерения времени как дробных частей продолжительности символа. Более длительная периодичность может быть достигнута посредством использования более длительных последовательностей ПСЧ.
Внутри системы МРТ, такой как система 100 МРТ, тактовые генераторы выборки используются, чтобы генерировать и осуществлять выборку разнообразных аналоговых сигналов, которые требуются, чтобы создавать изображение МРТ. Эти тактовые генераторы выборки должны быть синхронизированы друг с другом с очень высокой точностью. В случае РЧ тактовых генераторов выборки, максимальный дрейф у этих тактовых генераторов должен быть менее 22 пс для того, чтобы обеспечивать ошибку фазы в необработанных данных изображения ниже 1 градуса. Между тем, 22 пс являются временем, которое требуется беспроводному сигналу, чтобы пройти около 7 мм.
В случае беспроводных цифровых приемников для катушек МРТ, например, беспроводной РЧ станции 106b тактовые генераторы выборки внутри таких приемников должны быть синхронизированы с оставшейся частью системы МРТ (например, генератором 108 тактовых импульсов) посредством беспроводного сигнала синхронизации. Присутствует несколько проблем, связанных с беспроводной передачей сигнала синхронизации в среде системы МРТ. Одной из этих проблем является многолучевое распространение.
Фиг. 9 иллюстрирует феномен многолучевого распространения, который может возникать в системе беспроводной связи применительно к системе МРТ. Фиг. 9 иллюстрирует беспроводной передатчик 910 (например, станции беспроводной связи основного блока системы 100 МРТ) и беспроводной приемник 920 (например, беспроводной РЧ станции 106b). Здесь, беспроводной передатчик 910 передает беспроводной сигнал беспроводному приемнику 920 по беспроводному каналу в присутствии множества отражателей 902. Беспроводной сигнал проходит от беспроводного передатчика 910 к беспроводному приемнику 920 по множеству путей, включая основной путь 905 прямой видимости (ПВ) и множество дополнительных путей 915a, 915b, 915c и 915d. Кроме того, один или более из дополнительных путей 915a, 915b, 915c и 915d может меняться со временем, например, из-за перемещения одного или более из отражателей 902 и/или беспроводного передатчика 910 и/или беспроводного приемника 920. Данный эффект вызывает «многолучевое замирание»: сигналы по дополнительным путям 915a, 915b, 915c и 915d прибывают с разными задержками, амплитудами и фазами на беспроводной приемник 920, вследствие чего частично аннулирующий или дополняющий сигнал принимается по пути 905 ПВ. В случае беспроводных сигналов с очень короткой продолжительностью символа, многолучевые сигналы могут даже нести информацию из предыдущих символов, которые могут быть полностью несвязанными с текущим символом.
Фиг. 10 иллюстрирует пример импульсного отклика 1000 для канала беспроводной связи, который показывает многолучевое распространение. В частности, Фиг. 10 иллюстрирует типичную функцию импульсного отклика для сверхширокополосного (UWB) канала передачи с полосой пропускания канала сверх 500 МГц. Разнообразные эхо-сигналы с задержкой исходного импульса четко могут различаться во времени из-за очень большой полосы пропускания канала. Разброс задержки функции импульсного ответа зависит от природы окружения беспроводного канала. Типичный разброс задержки внутри сканера МРТ находится в диапазоне порядка 10 нс, что эквивалентно ~10 фут (3,048 м) расстояния перемещения добавленного к сигналам с задержкой. Соответственно, будет преимущественным предоставление одной или более методик ослабления многолучевого распространения, которые могут учитывать характеристики данной среды.
Фиг. 11 иллюстрирует модель 1100 канала беспроводной связи, который показывает многолучевое распространение. Здесь, переданный сигнал 1119 распространяется по множеству путей (путь ПВ и дополнительные пути), причем каждый путь (луч) изображается в виде линии 1112-1, 1112-2 … 1112-M задержки с конкретной задержкой τ1 … τM и комплексными множителями 1114-1, 114-2 … 1114-M с комплексными усилениями G1(t) … GM(t). Все из этих путей объединяются вместе с дальнейшими ослаблениями Аддитивного Гауссового Шума 1120 (AGN) и Помехами Множественного Доступа 1130 посредством объединителя, чтобы создать один сигнал 1229 приема r(t).
Как отмечается выше, все из тактовых генераторов в системе МРТ, которые вовлечены в смешанную обработку сигнала должны быть синхронизированы с высокой точностью. Невозможность сделать это будет вносить ошибки в цепочку сигнала, которая будет выражена в качестве шума поверх сигнала, или в качестве искажений из-за ошибок кодирования. Если часть цепочки сигнала осуществляется беспроводным образом, тогда требуется, чтобы тактовый сигнал был восстановлен из беспроводного сигнала.
Тем не менее, беспроводные сигналы испытывают ослабления из-за замирания по нескольким путям, варьирования задержки канала, нежелательных блокирующих сигналов и других факторов. Каждое из этих ослаблений имеет негативное влияние на качество восстановленного тактового сигнала. Разнообразие мер может быть использовано, чтобы противостоять этим ослаблениям, включая использование сверхширокополосного (UWB) беспроводного сигнала (например, полоса пропускания передачи > 500 МГц), использование особого кодирования сигнала, основанного на Кодах Псевдослучайного Шума (ПСЧ), таких как Коды Баркера и Голда, использование короткого сигнала типа импульсного радара (IR), использование согласованного фильтра и/или многолучевого когерентного приемника на принимающем конце, и/или периодическое определение параметров канала посредством измерения временного и/или частотного ответа канала.
Один метод противостояния эффектам ухудшения многолучевого канала состоит в тщательном зондировании канала и затем применении коррекции к принятому сигналу. Например, можно записывать импульсный отклик канала на скорости много выше временных вариаций канала и использовать данную информацию для «Многолучевого Когерентного Приемника» на принимающем конце. Импульсный отклик канала может быть найден либо во временной области, посредством применения короткого импульса вида Импульсного Радара (IR), либо в частотной области, посредством развертки по полосе пропускания канала с использованием сигнала вида с линейной частотной модуляцией.
Фиг. 12 иллюстрирует примерный вариант осуществления части приемника 1200, который может быть использован для приема беспроводного сигнала 1229 в канале связи, который показывает многолучевое распространение. Приемник 1200 включает в себя множество корреляторов 1212-1, 1212-2 … 1212-M и сигнальный процессор 1250, который включает в себя переменные элементы 1214-1, 1214-2 … 1214-M усиления, объединитель 1216, интегратор 1218 и блок 1220 принятия решения.
Во время работы, принятый беспроводной сигнал 1229 выдается корреляторам 1212-1, 1212-2 … 1212-M, которые осуществляют корреляцию принятого беспроводного сигнала 1229 с соответствующей временной задержкой, которая выбирается так, чтобы соответствовать одному пути многолучевого канала. Сигнальный процессор 1250 обрабатывает выходные данные корреляции множества корреляторов посредством: взвешивания выходных данных каждого коррелятора посредством соответствующего коэффициента α1, α2, … αM, который соответствует относительной мощности соответствующего пути многолучевого канала; сложения взвешенных выходных данных корреляторов, чтобы создать сумму; интегрирования суммы по одному битовому периоду принятого сдвинутого по фазе второго сигнала передачи; и сравнения суммы с пороговой величиной, чтобы определить значение для бита принятого беспроводного сигнала 1229 в битовый период, и вывода скомпенсированного с учетом многолучевого распространения выходного сигнала 1239.
Многолучевые эхо-сигналы также могут быть уменьшены в принятом сигнале посредством использования UWB сигнала с длинной длиной кодирования в качестве импульса синхронизации. Сигнал кодирования может быть выбран так, что он обладает сильным пиком автокорреляции с низким боковыми лепестками. Фиг. 13 иллюстрирует автокорреляцию примера последовательности синхронизации, которая может быть передана станцией беспроводной связи, чтобы противостоять эффектам многолучевого распространения, демонстрирующая сильный пик 1310 автокорреляции. Примерами таких сигналов являются Коды Псевдослучайного Шума (ПСЧ), такие как Коды Баркера, или Коды Голда.
Несмотря на то, что предпочтительные варианты осуществления раскрываются в данном документе, возможно много вариаций, которые остаются в рамках концепции и объема изобретения. Такие вариации будут очевидны специалисту в соответствующей области техники после изучения технического описания, чертежей и формулы изобретения в данном документе. Вследствие этого настоящее изобретение не должно быть ограничено ничем, за исключением объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПИЛОТ-СИГНАЛА В ПРИЕМНОМ УСТРОЙСТВЕ СИСТЕМЫ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1998 |
|
RU2208914C2 |
| СПОСОБ УПРАВЛЕНИЯ ОТВОДАМИ МНОГООТВОДНОГО ПРИЕМНИКА В СИСТЕМЕ СВЯЗИ С РАСШИРЕННЫМ СПЕКТРОМ | 1998 |
|
RU2142673C1 |
| СИНХРОНИЗАЦИЯ В ШИРОКОВЕЩАТЕЛЬНОЙ СИСТЕМЕ МОЧРК С ИСПОЛЬЗОВАНИЕМ МУЛЬТИПЛЕКСИРОВАННЫХ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ ПИЛОТ-СИГНАЛОВ | 2004 |
|
RU2369016C2 |
| СИСТЕМА ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ ПОДВОДНОГО АППАРАТА | 2023 |
|
RU2822986C1 |
| АБОНЕНТСКИЙ БЛОК И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ В БЕСПРОВОДНОЙ СИСТЕМЕ СВЯЗИ | 1998 |
|
RU2242086C2 |
| ОБОРУДОВАНИЕ ДЛЯ ОБРАБОТКИ СИГНАЛОВ AltBOC СО СПУТНИКОВ "ГАЛИЛЕО" | 2003 |
|
RU2339051C2 |
| АБОНЕНТСКИЙ БЛОК И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ В БЕСПРОВОДНОЙ СИСТЕМЕ СВЯЗИ | 1998 |
|
RU2313176C2 |
| НАВИГАЦИОННЫЙ ПРИЕМНИК | 2008 |
|
RU2481596C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СОТОВОГО ТЕЛЕФОНА | 1994 |
|
RU2107925C1 |
| УСТРОЙСТВО И СПОСОБ ПРИЕМА ДАННЫХ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ, ИСПОЛЬЗУЮЩЕЙ СХЕМУ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2320083C2 |

Использование: для магнитно-резонансной томографии (МРТ). Сущность изобретения заключается в том, что система магнитно-резонансной томографии (МРТ) включает в себя беспроводную РЧ станцию, которая связана с одной или более РЧ катушками, которые воспринимают магнитно-резонансный (МР) сигнал, испускаемый от субъекта при исследовании МРТ. Беспроводная РЧ станция сообщает цифровые данные, представляющие собой воспринятый МР сигнал, контроллеру МРТ для дальнейшей обработки, которая может включать в себя отображение. Внутренний тактовый генератор в беспроводной РЧ станции точно синхронизируется с тактовым генератором контроллера МРТ, с помощью синхронизации фазы несущей частоты и отслеживания фазы кода у заданной последовательности кода, такой как последовательность псевдослучайных чисел (ПСЧ). Технический результат: повышение качества беспроводной связи. 3 н. и 17 з.п. ф-лы, 14 ил.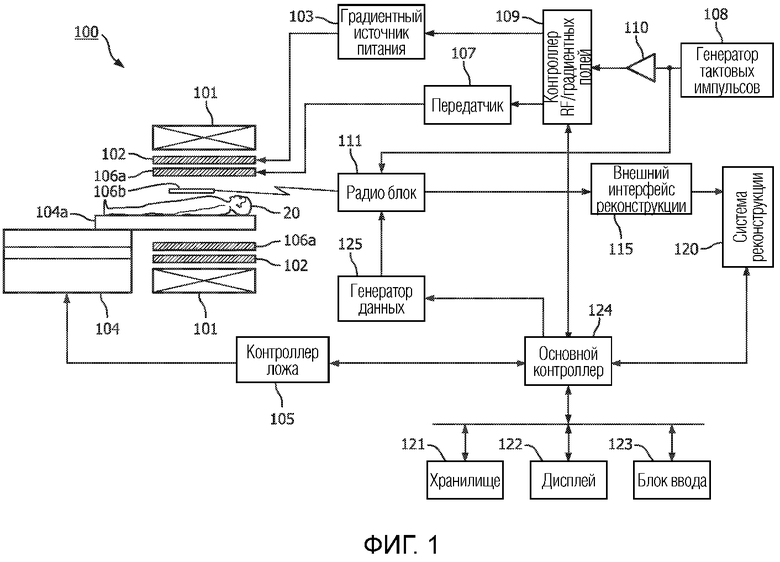
1. Способ беспроводной связи для систем магнитно-резонансной томографии, содержащий этапы, на которых:
передают от радиочастотного (РЧ) передатчика первой станции (310, 410, 510, 610) беспроводной связи системы (100) магнитно-резонансной томографии (МРТ) первый сигнал (1119, 4119, 6119) передачи, содержащий первый сигнал (4111) основной полосы частот, преобразованный с повышением частоты с помощью первого несущего сигнала (5111), имеющего первую несущую частоту, которая является произведением первого значения (5125) и первой частоты первого гетеродина (Г) (4115) первой станции беспроводной связи, причем первый несущий сигнал является синхронным с первым Г первой станции беспроводной связи;
принимают по беспроводному каналу (10) на РЧ приемнике второй станции (320, 420, 520, 620) беспроводной связи системы МРТ сдвинутый по фазе первый сигнал (1229, 4229, 6229) передачи, содержащий первый сигнал передачи с его фазой, сдвинутой на первый фазовый сдвиг канала, который равен временной задержке беспроводного канала, умноженной на первую несущую частоту;
на второй станции беспроводной связи умножают второй сигнал основной полосы частот на сигнал коррекции с получением скорректированного второго сигнала (4211) основной полосы частот и передают второй сигнал (4219, 6219) передачи, содержащий скорректированный второй сигнал основной полосы частот, преобразованный с повышением частоты с помощью второго несущего сигнала (5213), имеющего вторую несущую частоту, которая является произведением второго значения (5215) и второй частоты Г второго Г (4215) второй станции беспроводной связи, при этом второй сигнал передачи имеет вторую несущую частоту передачи, которая является произведением второго значения и первой частоты Г, и который является синхронным по частоте с первым Г первой станции беспроводной связи;
принимают по беспроводному каналу на РЧ приемнике первой станции беспроводной связи сдвинутый по фазе второй сигнал (4129) передачи, содержащий второй сигнал передачи с его фазой, сдвинутой на второй фазовый сдвиг канала, который равен временной задержке беспроводного канала (10), умноженной на вторую несущую частоту передачи; и
выявляют на первой станции беспроводной связи временную задержку беспроводного канала из принятого сдвинутого по фазе второго сигнала передачи.
2. Способ по п. 1, в котором первая станция беспроводной связи включает в себя первый тактовый генератор (6101), а вторая станция беспроводной связи включает в себя второй тактовый генератор (6202), причем способ дополнительно содержит регулировку одного из первого и второго тактовых генераторов в ответ на выявленную временную задержку беспроводного канала.
3. Способ по п. 1, в котором второй сигнал основной полосы частот и первый сигнал основной полосы частот являются одинаковыми друг с другом.
4. Способ по п. 1, в котором сигнал (4211) коррекции имеет частоту, равную произведению: (1) второго значения (5125) и (2) разности между первой частотой Г и второй частотой Г; и при этом сигнал коррекции имеет фазу, равную произведению (1) второго значения, (2) первой частоты Г и (3) временной задержки беспроводного канала.
5. Способ по п. 1, в котором восстановление фазового сдвига канала на первой станции беспроводной связи из принятого сдвинутого по фазе второго сигнала передачи содержит смешивание принятого сдвинутого по фазе второго сигнала передачи с сигналом (5113) преобразования с понижением частоты, имеющим частоту, которая является произведением второго значения (5215) и первой частоты Г, и который является синхронным с первым Г.
6. Способ по п. 1, дополнительно содержащий на первой станции беспроводной связи этапы, на которых:
генерируют последовательность (6113) псевдослучайных чисел (ПСЧ) передачи с использованием локального тактового генератора (6110) первой станции беспроводной связи;
восстанавливают принятую последовательность (6123) ПСЧ из принятого сдвинутого по фазе второго сигнала передачи с использованием тактового генератора с восстановленным сигналом первой станции беспроводной связи, который восстанавливается из принятого сдвинутого по фазе второго сигнала передачи, причем принятая последовательность ПСЧ была сгенерирована на второй станции беспроводной связи с использованием локального тактового генератора (6215) второй станции беспроводной связи; и
сравнивают последовательность ПСЧ передачи с принятой последовательностью ПСЧ, чтобы определить ошибку фазового сдвига кода между первой станцией беспроводной связи и второй станцией беспроводной связи.
7. Способ по п. 1, в котором беспроводной канал является многолучевым каналом, причем способ дополнительно содержит на первой станции беспроводной связи этапы, на которых:
подают принятый сдвинутый по фазе второй сигнал передачи на множество корреляторов (1212-1 … 1212-M), причем каждый коррелятор выполнен с возможностью корреляции принятого сдвинутого по фазе второго сигнала передачи с соответствующей временной задержкой (1112-1 … 1112-M), которая выбрана соответствующей одному лучу многолучевого канала;
взвешивают выходные данные каждого коррелятора посредством соответствующего коэффициента (1214-1 … 1214a-M), который соответствует относительной мощности соответствующего луча многолучевого канала;
складывают взвешенные выходные данные корреляторов с получением суммы;
интегрируют сумму по битовому интервалу принятого сдвинутого по фазе второго сигнала передачи; и
сравнивают сумму с пороговой величиной, чтобы определить значение для бита (1229) принятого сдвинутого по фазе второго сигнала передачи в битовом интервале.
8. Способ по п. 1, в котором первый сигнал (4119) передачи включает в себя последовательность (6113) синхронизации, причем способ дополнительно содержит на второй станции беспроводной связи этапы, на которых:
обнаруживают принятый сдвинутый по фазе первый сигнал передачи с помощью согласованного фильтра для последовательности синхронизации с получением выходного сигнала синхронизации; и
обнаруживают пик в выходном сигнале синхронизации и регулируют локальный тактовый генератор второй станции беспроводной связи в ответ на временную привязку обнаруженного пика в выходном сигнале синхронизации.
9. Система (100, 400, 500) беспроводной связи для систем магнитно-резонансной томографии, содержащая:
первую станцию (310, 410, 510, 610) беспроводной связи, имеющую
первый гетеродин (Г) (4115), выполненный с возможностью создания первого сигнала Г с первой частотой Г,
первый радиочастотный (РЧ) передатчик (6910, 910) и
первый РЧ приемник (6920, 920),
при этом первый РЧ передатчик (6910) выполнен с возможностью передачи первого сигнала (1119, 4119, 6119) передачи, содержащего первый сигнал (4111) основной полосы частот, преобразованный с повышением частоты с помощью первого несущего сигнала (5111), имеющего первую несущую частоту, которая является произведением первого значения и первой частоты Г, причем первый несущий сигнал является синхронным с первым Г;
вторую станцию (320, 420, 520, 620) беспроводной связи, имеющую
второй Г (4215), выполненный с возможностью создания второго сигнала Г со второй частотой Г,
второй РЧ передатчик (7910) и
второй РЧ приемник (7920),
при этом второй РЧ приемник выполнен с возможностью приема по беспроводному каналу (10) сдвинутого по фазе первого сигнала (1229, 4229, 6229) передачи, содержащего первый сигнал передачи с его фазой, сдвинутой на первый фазовый сдвиг канала, который равен временной задержке беспроводного канала, умноженной на первую несущую частоту,
при этом вторая станция беспроводной связи выполнена с возможностью умножения второго сигнала основной полосы частот на сигнал коррекции с получением скорректированного второго сигнала (4211) основной полосы частот,
при этом второй РЧ передатчик выполнен с возможностью передачи второго сигнала (4219, 6219) передачи, содержащего скорректированный второй сигнал основной полосы частот, преобразованный с повышением частоты с помощью второго несущего сигнала (5213), имеющего вторую несущую частоту, которая является произведением второго значения (5215) и второй частоты второго Г (4215) второй станции беспроводной связи, при этом второй сигнал передачи имеет вторую несущую частоту передачи, которая является произведением второго значения и первой частоты Г, и который является синхронным по частоте с первым Г первой станции беспроводной связи,
при этом первый РЧ приемник выполнен с возможностью приема по беспроводному каналу сдвинутого по фазе второго сигнала (4129, 6129) передачи, содержащего второй сигнал передачи с его фазой, сдвинутой на второй фазовый сдвиг канала, который равен временной задержке беспроводного канала (10), умноженной на вторую несущую частоту передачи, и
при этом первая станция беспроводной связи выполнена с возможностью выявления временной задержки беспроводного канала из принятого сдвинутого по фазе второго сигнала передачи.
10. Система (100) по п. 9, дополнительно содержащая:
магнит (101);
стол (104) пациента, выполненный с возможностью поддержки пациента;
градиентные катушки (102), выполненные с возможностью по меньшей мере частично окружать по меньшей мере часть пациента;
блок (106a) радиочастотных (РЧ) катушек, выполненный с возможностью подачи РЧ сигнала к по меньшей мере части пациента, которая томографируется, и изменения выставления магнитного поля; и
блок (20) приемных катушек, выполненный с возможностью восприятия магнитно-резонансного сигнала, испускаемого от пациента в ответ на РЧ сигнал,
при этом вторая станция беспроводной связи выполнена с возможностью передачи первой станции связи по беспроводному каналу данных, представляющих собой воспринятый магнитно-резонансный сигнал.
11. Система (100, 400, 500) по п. 9, причем сигнал коррекции имеет частоту, равную произведению: (1) второго значения и (2) разности между первой частотой Г и второй частотой Г; и при этом сигнал коррекции имеет фазу, равную произведению (1) второго значения, (2) первой частоты Г и (3) временной задержки беспроводного канала.
12. Система (100, 400, 500) по п. 9, причем первая станция беспроводной связи дополнительно включает в себя преобразователь (6127) с понижением частоты, выполненный с возможностью смешивания принятого сдвинутого по фазе второго сигнала передачи с сигналом (5113) преобразования с понижением частоты, имеющим частоту, которая является произведением второго значения и первой частоты Г, и который является синхронным с первым Г.
13. Система (100, 400, 500) по п. 9, причем первая станция беспроводной связи включает в себя первый локальный тактовый генератор (6115), и при этом вторая станция беспроводной связи включает в себя:
второй локальный тактовый генератор (6202);
тактовый генератор (6220) с восстановленным сигналом, восстановленным из принятого сдвинутого по фазе первого сигнала передачи;
генератор (6212) последовательности псевдослучайных чисел (ПСЧ) передачи, выполненный с возможностью генерации последовательности ПСЧ передачи с использованием второго локального тактового генератора; и
процессор (6150), выполненный с возможностью:
восстановления принятой последовательности ПСЧ из принятого сдвинутого по фазе первого сигнала передачи с использованием тактового генератора с восстановленным сигналом, причем принятая последовательность ПСЧ была сгенерирована на первой станции беспроводной связи с использованием первого локального тактового генератора; и
сравнения последовательности ПСЧ передачи с принятой последовательностью ПСЧ, чтобы определить ошибку фазового сдвига кода между первой станцией беспроводной связи и второй станцией беспроводной связи.
14. Система (100, 400, 500) по п. 9, причем беспроводной канал является многолучевым каналом, при этом первая станция беспроводной связи содержит:
множество корреляторов (1212-1 … 1212-M), каждый из которых выполнен с возможностью корреляции принятого сдвинутого по фазе второго сигнала передачи с соответствующей временной задержкой (1112-1 … 1112-M), которая выбрана соответствующей одному лучу многолучевого канала;
процессор (1250), выполненный с возможностью обработки выходных данных корреляции упомянутого множества корреляторов посредством:
взвешивания выходных данных каждого коррелятора посредством соответствующего коэффициента (1214-1 … 1214-M), который соответствует относительной мощности соответствующего луча многолучевого канала;
сложения взвешенных выходных данных корреляторов с получением суммы;
интегрирования суммы по одному битовому периоду принятого сдвинутого по фазе второго сигнала передачи; и
сравнения суммы с пороговой величиной, чтобы определять значение (1229) для бита принятого сдвинутого по фазе второго сигнала передачи в битовом периоде.
15. Система (100, 400, 500) по п. 9, причем первый сигнал (4119) передачи включает в себя последовательность (6113) синхронизации, при этом вторая станция беспроводной связи включает в себя:
локальный тактовый генератор (6120);
согласованный фильтр для последовательности синхронизации, выполненный с возможностью обнаружения принятого сдвинутого по фазе первого сигнала передачи и создания выходного сигнала синхронизации; и
пиковый детектор, выполненный с возможностью обнаружения пика (1310) в выходном сигнале синхронизации,
при этом локальный тактовый генератор регулируется в ответ на временную привязку обнаруженного пика в выходном сигнале синхронизации.
16. Система (100, 400, 500) беспроводной связи для систем магнитно-резонансной томографии, содержащая:
первую станцию (310, 410, 510, 610) беспроводной связи, включающую в себя:
первый локальный тактовый генератор (6110);
первый генератор (6112) последовательности псевдослучайных чисел (ПСЧ), выполненный с возможностью генерации первой последовательности (6113) ПСЧ с использованием первого локального тактового генератора; и
первый передатчик (6910), выполненный с возможностью передачи первого сигнала (1119, 4119, 6119) передачи, включающего в себя первую последовательность ПСЧ; и
вторую станцию (320, 420, 520, 620) беспроводной связи, которая выполнена с возможностью приема по беспроводному каналу (10) сдвинутого по фазе первого сигнала (1229, 4229, 6229) передачи, содержащего первый сигнал передачи с его фазой, сдвинутой на первый фазовый сдвиг канала, который зависит от временной задержки беспроводного канала, при этом вторая станция беспроводной связи включает в себя:
второй локальный тактовый генератор (6210);
второй генератор (6212) последовательности ПСЧ, выполненный с возможностью генерации второй последовательности (6213) ПСЧ с использованием второго локального тактового генератора;
первый тактовый генератор (6201) с восстановленным сигналом, восстановленным из принятого сдвинутого по фазе первого сигнала передачи; и
процессор (6250), выполненный с возможностью:
восстановления первой последовательности ПСЧ из принятого сдвинутого по фазе первого сигнала передачи с использованием первого тактового генератора с восстановленным сигналом; и
сравнения второй последовательности ПСЧ с восстановленной первой последовательностью ПСЧ, чтобы определять ошибку фазового сдвига кода между первой станцией беспроводной связи и второй станцией беспроводной связи.
17. Система (100, 400, 500) по п. 16, причем вторая станция связи дополнительно включает в себя второй передатчик (7910), выполненный с возможностью передачи второго сигнала (4219, 6219) передачи, включающего в себя вторую последовательность ПСЧ, и
при этом первая станция беспроводной связи выполнена с возможностью приема по беспроводному каналу сдвинутого по фазе второго сигнала (4129, 6129) передачи, содержащего второй сигнал передачи с его фазой, сдвинутой на второй фазовый сдвиг канала, который зависит от временной задержки беспроводного канала, при этом первая станция связи дополнительно включает в себя:
второй тактовый генератор (6120) с восстановленным сигналом, восстановленным из принятого сдвинутого по фазе второго сигнала передачи; и
процессор (6150), выполненный с возможностью:
восстановления второй последовательности ПСЧ из принятого сдвинутого по фазе второго сигнала передачи с использованием второго тактового генератора с восстановленным сигналом; и
сравнения первой последовательности ПСЧ с восстановленной второй последовательностью ПСЧ, чтобы определять ошибку фазового сдвига кода между первой станцией беспроводной связи и второй станцией беспроводной связи.
18. Система (100, 400, 500) по п. 16, причем процессор включает в себя коррелятор (800), который выполнен с возможностью сравнения восстановленной первой последовательности ПСЧ с по меньшей мере тремя сдвинутыми по времени копиями второй последовательности ПСЧ и определения того, какая из упомянутых по меньшей мере трех сдвинутых по времени копий второй последовательности ПСЧ имеет наивысшую корреляцию с восстановленной первой последовательностью ПСЧ, и при этом система выполнена с возможностью регулировать временную привязку одного из первого и второго генераторов последовательности ПСЧ в соответствии с той из упомянутых по меньшей мере трех сдвинутых по времени копий второй последовательности ПСЧ, которая имеет наивысшую корреляцию с восстановленной первой последовательностью ПСЧ, чтобы синхронизировать первый и второй генераторы последовательности ПСЧ друг с другом.
19. Система (100, 400, 500) по п. 16, причем беспроводной канал является многолучевым каналом, при этом вторая станция беспроводной связи содержит:
множество корреляторов (1212-1 … 1212-M), каждый из которых выполнен с возможностью корреляции принятого сдвинутого по фазе первого сигнала передачи с соответствующей временной задержкой (1112-1 … 1112-M), которая выбирается соответствующей одному лучу многолучевого канала;
сигнальный процессор (1250), выполненный с возможностью обработки выходных данных корреляции упомянутого множества корреляторов посредством:
взвешивания выходных данных каждого коррелятора посредством соответствующего коэффициента (1214-1 … 1214-M), который соответствует относительной мощности соответствующего луча многолучевого канала;
сложения взвешенных выходных данных корреляторов с получением суммы;
интегрирования суммы по одному битовому периоду принятого сдвинутого по фазе второго сигнала передачи; и
сравнения суммы с пороговой величиной, чтобы определить значение для бита принятого сдвинутого по фазе второго сигнала передачи в битовом периоде.
20. Система (100, 400, 500) по п. 16, причем первый сигнал передачи включает в себя последовательность синхронизации, при этом вторая станция беспроводной связи включает в себя:
согласованный фильтр для последовательности синхронизации, выполненный с возможностью обнаружения принятого сдвинутого по фазе первого сигнала передачи и создания выходного сигнала синхронизации; и
пиковый детектор, выполненный с возможностью обнаружения пика (1310) в выходном сигнале синхронизации,
при этом второй локальный тактовый генератор регулируется в ответ на временную привязку обнаруженного пика в выходном сигнале синхронизации.
| US 7123009 B1, 17.10.2006 | |||
| US 7230425 B2, 12.06.2007 | |||
| US 2005107681 A1, 19.05.2005 | |||
| US 2010188208 A1, 29.07.2010 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ СВЕРХШИРОКОПОЛОСНОЙ РАДИОПЕРЕДАЧИ В СИСТЕМАХ MRI (МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ) | 2007 |
|
RU2422843C2 |

