[Область техники]
[0001]
Настоящее изобретение относится к устройству связи, устройству демодуляции, устройству восстановления несущей, устройству компенсации фазовой ошибки, способу управления для устройства компенсации фазовой ошибки и к запоминающему носителю, на котором сохранена управляющая программа для устройства компенсации фазовой ошибки.
[Предшествующий уровень техники]
[0002]
В цифровой связи в качестве способа модуляции и демодуляции для выполнения эффективной передачи данных известен способ квадратурной амплитудной модуляции (QAM), в котором информация о фазе и информация об амплитуде используются для идентификации данных. В последние годы в качестве потребности увеличения пропускной способности в системе связи существовала потребность повышения уровня модуляции. Однако имеется проблема в том, что повышение уровня модуляции может увеличить вероятность ошибки передачи, обусловленной шумом, и снизить устойчивость к шуму. В частности, фазовый шум, преимущественно вызванный опорным генератором (LO; гетеродин) в устройстве передачи и в устройстве приема, может увеличить неопределенность информации о фазе и может значительно ухудшить частоту появления ошибочных битов (BER). В связи с вышеизложенным для выполнения передачи данных с повышенной надежностью по способу многоуровневой QAM, в котором количество сигнальных точек равно, например, 256 или больше, необходимо с высокой точностью оценивать фазовую ошибку, обусловленную фазовым шумом, и компенсировать эту фазовую ошибку. Одновременно необходимо повысить устойчивость к ошибке, вызванной другими факторами, например тепловым шумом.
[0003]
В вышеупомянутой области техники известно устройство демодуляции, в котором фазовая ошибка компенсируется фазовой автоподстройкой частоты, и устройство восстановления символов QAM для вывода битовой последовательности, отражающей информацию правдоподобия, и декодер с исправлением ошибок для ввода информации правдоподобия и выполнения процесса исправления ошибок предоставляются на последующем этапе фазовой автоподстройки частоты, чтобы реализовать повышение устойчивости к ошибкам. PTL 1 описывает пример устройства восстановления символов QAM.
[0004]
Однако может быть невозможно получить достаточно улучшенную частоту появления ошибочных битов в зависимости от величины фазового шума, включенного в сигнал основной полосы для вывода из детектора, или вследствие ухудшения точности обнаружения фазы, возникающего в результате теплового шума или т. п. В связи с вышеизложенным известна методика для повышения точности компенсации фазовой ошибки путем адаптивного регулирования полосы пропускания контурного фильтра в фазовой автоподстройке частоты. PTL 2, PTL 3 и PTL 4 раскрывают вышеупомянутую методику. Однако устойчивость к ошибкам может все еще быть недостаточной.
[0005]
Кроме того, известен способ демодуляции, в котором для повышения точности компенсации фазовой ошибки используется сглаживающая фазовая автоподстройка частоты (S-PLL), которая является усовершенствованной фазовой автоподстройкой частоты. Например, NPL 1 и NPL 2 раскрывают принцип компенсации фазового шума путем усреднения, как описано выше.
[Список источников]
[Патентная литература]
[0006]
[PTL 1] Повторная публикация международной публикации PCT № W02011/068119
[PTL 2] Выложенная публикация патента Японии № 2000-101666
[PTL 3] Перевод на японский язык публикации международной заявки PCT № 2003-531523
[PTL 4] Выложенная публикация патента Японии № 2011-101177
[Непатентная литература]
[0007]
[NPL 1] J. Yang, B. Geller, C. Herzet, J. M. Brossier, "Smoothing PLLs for QAM Dynamical Phase Estimation", IEEE ICC 2009 Proceedings, 2009/6/14
[NPL 2] J. Yang, B. Geller, "Near Optimal Low Complexity Smoothing Loops for Dynamical Phase Estimation-Application to BPSK Modulated Signal", IEEE Transactions on Signal Processing, 2009/9/1
[Сущность изобретения]
[Техническая проблема]
[0008]
Однако в методике, описанной в вышеупомянутой литературе, ограничен эффект компенсации фазового шума путем фазовой автоподстройки частоты. В частности, когда уровень фазового шума, включенного в сигнал основной полосы для вывода из детектора, высок по сравнению с количеством уровней сигнала по способу QAM, невозможно получить достаточно улучшенную частоту появления ошибочных битов, и сложно выполнять передачу данных большого объема и высокого качества. Кроме того, та же проблема, что описана выше, применима к сглаживающей фазовой автоподстройке частоты. В частности, когда отношение сигнал-шум (SNR) большое, невозможно ожидать улучшение по сравнению с фазовой автоподстройкой частоты. Поэтому невозможно получить достаточную частоту появления ошибочных битов, и сложно выполнять передачу данных большого объема и высокого качества.
[0009]
Цель настоящего изобретения - предоставить методику для решения вышеупомянутых проблем.
[Решение проблемы]
[0010]
Для достижения описанной выше цели устройство компенсации фазовой ошибки содержит:
первый фильтр обнаружения фазовой ошибки, который формирует первое значение разности фаз и первое значение оценки фазовой ошибки на основе принятых символов в прямой последовательности;
второй фильтр обнаружения фазовой ошибки, который формирует второе значение разности фаз и второе значение оценки фазовой ошибки на основе принятых символов в обратной последовательности;
средство сложения фазовых ошибок, которое формирует третье значение оценки фазовой ошибки на основе первого значения оценки фазовой ошибки и второго значения оценки фазовой ошибки и одного из первого значения разности фаз и второго значения разности фаз; и
средство компенсации фазовой ошибки, которое компенсирует фазовую ошибку в принятых символах в соответствии с третьим значением оценки фазовой ошибки.
[0011]
Для достижения описанной выше цели устройство восстановления несущей содержит:
устройство компенсации фазовой ошибки по любому из п. п. 1-5;
средство восстановления символов, которое восстанавливает принятые символы, фазовая ошибка которых компенсируется устройством компенсации фазовой ошибки; и
средство декодирования с исправлением ошибок, которое исправляет ошибку, включенную в принятые символы, фазовая ошибка которых компенсируется на основе выходного сигнала средства восстановления символов, и выводит демодулированные данные.
[0012]
Для достижения описанной выше цели устройство демодуляции содержит:
устройство восстановления несущей;
опорный генератор, который выводит опорный сигнал фиксированной частоты;
детектор, который ортогонально детектирует входной сигнал промежуточной частоты и формирует сигнал основной полосы Ich и сигнал основной полосы Qch; и
аналого-цифровой преобразователь, который преобразует сформированный сигнал основной полосы в цифровой сигнал и вводит цифровой сигнал в устройство восстановления несущей в качестве принятых символов.
[0013]
Для достижения описанной выше цели устройство связи содержит:
по меньшей мере устройство демодуляции;
схему приема, которая выбирает радиоволну с предварительно определенной полосой частот из радиоволн, принимаемых антенной, чтобы преобразовать выбранную радиоволну в сигнал промежуточной частоты, и вводит преобразованный сигнал в устройство демодуляции; и
средство декодирования принятых данных, которое декодирует демодулированные данные, введенные устройством демодуляции, и формирует принятые данные.
[0014]
Для достижения описанной выше цели способ компенсации фазовой ошибки содержит:
формирование последовательности значений φ(1), φ(2), …, φ(M) разности фаз (где M - положительное целое число) между последовательностью принятых символов и последовательностью опорных символов;
последовательное вычисление первых значений θ+(1), θ+(2), …, θ+(M), θ+(M+1) оценки фазовой ошибки, обусловленных фазовым шумом, включенным в последовательность значений разности фаз, на основе последовательности значений разности фаз;
последовательное вычисление вторых значений θ-(M), θ-(M-1), …, θ-(1) оценки фазовой ошибки на основе последовательности значений φ(M), φ(M-1), …, φ(1) разности фаз путем установки θ+(M+1) в качестве начального значения;
вычисление третьих значений θ±(1), θ±(2), …, θ±(M) оценки фазовой ошибки путем линейного вычисления первых значений θ+(1), θ+(2), …, θ+(M) оценки фазовой ошибки, вторых значений θ-(1), θ-(2), …, θ-(M) оценки фазовой ошибки и значений φ(1), φ(2), …, φ(M) разности фаз;
последовательное вычисление первых значений оценки фазовой ошибки, вторых значений оценки фазовой ошибки и третьих значений оценки фазовой ошибки, включенных в значения φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз касательно положительного целого k, с помощью процессов вычисления; и
компенсацию фазовой ошибки путем вычитания третьих значений θ±(kM+1), θ±(kM+2), …, θ±((k+1)M) оценки фазовой ошибки из значений φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз.
[0015]
Для достижения описанной выше цели на запоминающий носитель сохраняется программа компенсации фазовой ошибки, которая предписывает компьютеру исполнять процессы:
формирования последовательности значений θ(1), θ(2), …, θ(M) разности фаз (где M - положительное целое число) между последовательностью принятых символов и последовательностью опорных символов;
последовательного вычисления первых значений θ+(1), θ+(2), …, θ+(M), θ+(M+1) оценки фазовой ошибки, обусловленных фазовым шумом, включенным в последовательность значений разности фаз, на основе последовательности значений разности фаз;
последовательного вычисления вторых значений θ-(M), θ-(M-1), …, θ-(1) оценки фазовой ошибки на основе последовательности значений φ(M), φ(M-1), …, φ(1) разности фаз путем установки θ+(M+1) в качестве начального значения;
вычисления третьих значений θ±(1), θ±(2), …, θ±(M) оценки фазовой ошибки путем линейного вычисления первых значений θ+(1), θ+(2), …, θ+(M) оценки фазовой ошибки, вторых значений θ-(1), θ-(2), …, θ-(M) оценки фазовой ошибки и значений φ(1), φ(2), …, φ(M) разности фаз;
последовательного вычисления первых значений оценки фазовой ошибки, вторых значений оценки фазовой ошибки и третьих значений оценки фазовой ошибки, включенных в значения φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз касательно положительного целого k, с помощью процессов вычисления; и
компенсации фазовой ошибки путем вычитания третьих значений θ±(kM+1), θ±(kM+2), …, θ±((k+1)M) оценки фазовой ошибки из значений φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз.
[Полезные результаты изобретения]
[0016]
В соответствии с настоящим изобретением можно выполнять передачу данных большого объема и высокого качества с улучшенной частотой появления ошибочных битов даже в неблагоприятном шумовом окружении, преимущественно обусловленном фазовым шумом или тепловым шумом.
[Краткое описание чертежей]
[0017]
Фиг. 1 - блок-схема, иллюстрирующая конфигурацию устройства компенсации фазовой ошибки в первом примерном варианте осуществления настоящего изобретения.
Фиг. 2A - блок-схема, иллюстрирующая конфигурацию устройства связи, включающего в себя устройство компенсации фазовой ошибки во втором примерном варианте осуществления настоящего изобретения.
Фиг. 2B - блок-схема, иллюстрирующая конфигурацию устройства демодуляции, включающего в себя устройство компенсации фазовой ошибки во втором примерном варианте осуществления настоящего изобретения.
Фиг. 3 - блок-схема, иллюстрирующая конфигурацию устройства компенсации фазовой ошибки во втором примерном варианте осуществления настоящего изобретения.
Фиг. 4A - блок-схема, иллюстрирующая конфигурацию устройства компенсации фазовой ошибки в качестве базовой методики.
Фиг. 4B - блок-схема, иллюстрирующая конфигурацию устройства компенсации фазовой ошибки в качестве базовой методики.
Фиг. 5 - блок-схема, иллюстрирующая конфигурацию фильтра обнаружения фазовой ошибки во втором примерном варианте осуществления настоящего изобретения.
Фиг. 6 - блок-схема, иллюстрирующая конфигурацию блока сложения фазовых ошибок во втором примерном варианте осуществления настоящего изобретения.
Фиг. 7A - блок-схема, иллюстрирующая конфигурацию блока формирования параметров во втором примерном варианте осуществления настоящего изобретения.
Фиг. 7B - схема, иллюстрирующая конфигурацию таблицы для вычисления коэффициентов во втором примерном варианте осуществления настоящего изобретения.
Фиг. 8 - схема, иллюстрирующая пример спектра фазового шума у опорного генератора для формирования параметров во втором примерном варианте осуществления настоящего изобретения.
Фиг. 9 - блок-схема алгоритма, иллюстрирующая процедуру обработки в способе компенсации фазового шума во втором примерном варианте осуществления настоящего изобретения.
Фиг. 10 - графики, иллюстрирующие связь между среднеквадратической ошибкой и отношением несущей к шуму, относящуюся к фазовой ошибке, когда выполняется передача QPSK и когда выполняется передача 256QAM с использованием способа компенсации фазовой ошибки во втором примерном варианте осуществления настоящего изобретения по сравнению с традиционным способом.
Фиг. 11 - блок-схема, иллюстрирующая конфигурацию устройства компенсации фазовой ошибки в третьем примерном варианте осуществления настоящего изобретения.
Фиг. 12 - блок-схема, иллюстрирующая конфигурацию блока сложения фазовых ошибок в третьем примерном варианте осуществления настоящего изобретения.
Фиг. 13 - блок-схема, иллюстрирующая конфигурацию устройства демодуляции, включающего в себя устройство компенсации фазовой ошибки в четвертом примерном варианте осуществления настоящего изобретения.
Фиг. 14 - блок-схема, иллюстрирующая конфигурацию устройства компенсации фазовой ошибки в четвертом примерном варианте осуществления настоящего изобретения.
Фиг. 15 - блок-схема, иллюстрирующая конфигурацию фильтра обнаружения фазовой ошибки в четвертом примерном варианте осуществления настоящего изобретения.
Фиг. 16 - блок-схема, иллюстрирующая конфигурацию устройства компенсации фазовой ошибки в пятом примерном варианте осуществления настоящего изобретения.
Фиг. 17 - блок-схема, иллюстрирующая конфигурацию устройства демодуляции в шестом примерном варианте осуществления настоящего изобретения.
[Описание вариантов осуществления]
[0018]
Ниже подробно описываются примерные варианты осуществления настоящего изобретения со ссылкой на чертежи. Отметим, что описанные в нижеследующих примерных вариантах осуществления составляющие элементы являются всего лишь примерными элементами, и технический объем настоящего изобретения не ограничивается только этими элементами.
[0019]
[Первый примерный вариант осуществления]
Устройство 100 компенсации фазовой ошибки в качестве первого примерного варианта осуществления настоящего изобретения описывается с использованием фиг. 1. Устройство 100 компенсации фазовой ошибки является устройством для компенсации фазового шума, сформированного в опорном генераторе, или теплового шума.
[0020]
Как проиллюстрировано на фиг. 1, устройство 100 компенсации фазовой ошибки включает в себя первый фильтр 101 обнаружения фазовой ошибки, второй фильтр 102 обнаружения фазовой ошибки, блок 103 сложения фазовых ошибок и блок 104 компенсации фазовой ошибки. Первый фильтр 101 обнаружения фазовой ошибки формирует первое значение 101b разности фаз и первое значение 101a оценки фазовой ошибки на основе принятых символов в прямой последовательности. Второй фильтр 102 обнаружения фазовой ошибки формирует второе значение 102b разности фаз и второе значение 102a оценки фазовой ошибки на основе принятых символов в обратной последовательности. Третье значение 103a оценки фазовой ошибки формируется на основе первого значения 101a оценки фазовой ошибки и второго значения 102a оценки фазовой ошибки и одного из первого значения 101b разности фаз и второго значения 102b разности фаз. Блок 104 компенсации фазовой ошибки компенсирует фазовую ошибку в принятых символах в соответствии с третьим значением 103a оценки фазовой ошибки.
[0021]
В соответствии с примерным вариантом осуществления фазовая ошибка компенсируется путем объединения значения оценки фазовой ошибки и значения разности фаз, сформированных на основе принятых символов в прямой последовательности и в обратной последовательности. Поэтому вышеупомянутая конфигурация позволяет выполнять передачу данных большого объема и высокого качества с улучшенной частотой появления ошибочных битов даже в неблагоприятном шумовом окружении, преимущественно обусловленном фазовым шумом или тепловым шумом.
[0022]
[Второй примерный вариант осуществления]
Далее описывается устройство компенсации фазовой ошибки во втором примерном варианте осуществления настоящего изобретения. Устройство компенсации фазовой ошибки в примерном варианте осуществления компенсирует фазовую ошибку путем объединения значения оценки фазовой ошибки и значения разности фаз, сформированных на основе принятых символов в прямой последовательности и в обратной последовательности. Кроме того, в примерном варианте осуществления приводится описание касательно устройства восстановления несущей, включающего в себя устройство компенсации фазовой ошибки, устройства демодуляции, включающего в себя устройство восстановления несущей, и устройства связи, включающего в себя устройство демодуляции.
[0023]
В примерном варианте осуществления используется способ модуляции, использующий информацию о фазе для идентификации данных. В примерном варианте осуществления в качестве примера способа модуляции описывается способ QAM. Можно применять примерный вариант осуществления, поскольку способ модуляции является способом модуляции, использующим информацию о фазе для идентификации данных. Кроме того, в примерном варианте осуществления в качестве способа обнаружения для способа демодуляции используется способ квазисинхронного обнаружения, в котором обнаружение выполняется на основе периодического сигнала с фиксированной частотой, который должен формироваться самой схемой демодуляции, а фазовая ошибка вычитается после обнаружения. Этот способ обнаружения выгоден, потому что не нужно формировать сигнал, полностью синхронный с несущей. В примерном варианте осуществления предоставляется устройство компенсации фазовой ошибки для компенсации фазовой ошибки, обусловленной фазовым шумом, по способу квазисинхронного обнаружения. Отметим, что описание упрощается касательно всей конфигурации устройства демодуляции по способу квазисинхронного обнаружения. Ниже преимущественно описывается раздел, относящийся к оценке фазовой ошибки, которая является ключевой особенностью примерного варианта осуществления.
[0024]
В способе QAM в качестве способа модуляции и демодуляции, когда количество сигнальных точек равно 2m (где m - положительное целое число), битовая последовательность для передачи на стороне передачи разделяется по m битов, и каждый m-ый бит отображается в одну из 2m сигнальных точек. Отображенные сигнальные точки можно выразить в виде комплексных чисел, которые называются переданными символами. Сигнал основной полосы, обнаруженный на приемной стороне и впоследствии преобразованный в цифровой сигнал, является принятыми символами, ассоциированными с переданными символами. Каждый из сигнала основной полосы Ich и сигнала основной полосы Qch можно выразить в виде комплексных чисел, ассоциированных с действительной частью и мнимой частью. В дальнейшем вышеупомянутые комплексные числа называются принятыми символами. Принятые символы служат в качестве входного сигнала в устройство компенсации фазовой ошибки в примерном варианте осуществления.
[0025]
<<Конфигурация устройства связи>>
Фиг. 2A - блок-схема, иллюстрирующая конфигурацию устройства связи, включающего в себя устройство 241 компенсации фазовой ошибки в примерном варианте осуществления. Устройство связи в примерном варианте осуществления можно использовать для предоставления транзитной линии, обязательной для услуг мобильной телефонии, услуг цифровой фиксированной связи или т. п. В частности, устройство связи в примерном варианте осуществления можно использовать в качестве высококачественной цифровой линии связи с большой пропускной способностью для соединения между базовыми станциями для предоставления услуг мобильной телефонии. Отметим, что конфигурация устройства связи не ограничивается конфигурацией, проиллюстрированной на фиг. 2A.
[0026]
Устройство связи в примерном варианте осуществления в качестве принимающей системы включает в себя схему 202 приема, устройство 200 демодуляции и блок 203 декодирования принятых данных. Схема 202 приема выбирает радиоволну с предварительно определенной полосой частот из радиоволн, принятых антенной 201, для преобразования в сигнал промежуточной частоты и выводит сигнал в устройство 200 демодуляции в примерном варианте осуществления. Блок 203 декодирования принятых данных декодирует демодулированные данные для вывода устройством 200 демодуляции и формирует принятые данные. Кроме того, устройство связи в примерном варианте осуществления в качестве системы передачи может включать в себя блок 205 кодирования передаваемых данных, устройство 204 модуляции и схему 206 передачи. Блок 205 кодирования передаваемых данных кодирует передаваемые данные. Устройство 204 модуляции модулирует кодированные передаваемые данные в соответствии со способом демодуляции для устройства 200 демодуляции и формирует сигнал промежуточной частоты. Схема 206 передачи формирует радиоволну с предварительно определенной полосой частот для передачи на основе сигнала промежуточной частоты и передает радиоволну из антенны 201.
[0027]
<<Конфигурация и работа устройства демодуляции>>
Фиг. 2B - блок-схема, иллюстрирующая конфигурацию устройства 200 демодуляции, включающего в себя устройство 241 компенсации фазовой ошибки в примерном варианте осуществления.
[0028]
Устройство 200 демодуляции является устройством для демодуляции сигнала данных, который модулируется и передается по способу QAM. Устройство 200 демодуляции снабжается опорным генератором 220, детектором 210, аналого-цифровым преобразователем 230 (в дальнейшем называемым А/Ц-преобразователем) и устройством 240 восстановления несущей.
[0029]
Опорный генератор 220 вводит опорный сигнал фиксированной частоты в детектор 210. Детектор 210 ортогонально детектирует входной сигнал промежуточной частоты (IF) и формирует сигнал основной полосы с такой же фазовой компонентой (Ich) и сигнал основной полосы с ортогональной компонентой (Qch). Сформированные сигналы основной полосы преобразуются в цифровые сигналы А/Ц-преобразователем 230 и вводятся в устройство 240 восстановления несущей в качестве принятых символов.
[0030]
Устройство 240 восстановления несущей снабжается устройством 241 компенсации фазовой ошибки в примерном варианте осуществления, блоком 242 восстановления символов QAM и декодером 243 с исправлением ошибок. Блок 242 восстановления символов QAM принимает принятые символы, фазовая ошибка которых компенсируется устройством 241 компенсации фазовой ошибки, и формирует входные данные в декодер 243 с исправлением ошибок, который предоставляется на последующем этапе блока 242 восстановления символов QAM. Декодер 243 с исправлением ошибок выполняет процесс для исправления битовой ошибки, включенной в принятые символы, на основе данных, введенных из блока 242 восстановления символов QAM. Данные после процесса исправления ошибок служат в качестве демодулированных данных, которые являются выходным сигналом устройства 200 демодуляции. В этом случае, когда количество раз выполнения компенсации фазовой ошибки устройством 241 компенсации фазовой ошибки достигает предварительно определенного определенного количества раз, или когда декодер 243 с исправлением ошибок определяет, что нет ошибки, выходной сигнал декодера 243 с исправлением ошибок выводится в виде демодулированных данных из устройства 200 демодуляции. В противном случае устройство 241 компенсации фазовой ошибки повторно компенсирует фазовую ошибку в принятых символах для повышения точности компенсации.
[0031]
В вышеупомянутой конфигурации может быть так, что устройство 240 восстановления несущей временно сохраняет введенные принятые символы в буфере и компенсирует фазовую ошибку в принятых символах, хранимых в буфере, используя множество раз устройство 241 компенсации фазовой ошибки.
[0032]
<<Устройство компенсации фазовой ошибки>>
Далее описывается конфигурация устройства 241 компенсации фазовой ошибки в примерном варианте осуществления. Базовая методика, относящаяся к конфигурации устройства компенсации фазовой ошибки, описывается для прояснения признаков устройства 241 компенсации фазовой ошибки.
[0033]
<<Конфигурация устройства компенсации фазовой ошибки в качестве базовой методики>>
Фиг. 4A - блок-схема, иллюстрирующая конфигурацию устройства 241A компенсации фазовой ошибки в качестве базовой методики. Путем замены устройства 241 компенсации фазовой ошибки, проиллюстрированного на фиг. 2B, устройством 241A компенсации фазовой ошибки, проиллюстрированным на фиг. 4A, конфигурируется устройство демодуляции в качестве базовой методики.
[0034]
Устройство 241A компенсации фазовой ошибки, проиллюстрированное на фиг. 4A, снабжается фазовой автоподстройкой частоты (PLL), составленной умножителем 411 матрицы вращения, блоком 412 обнаружения фазы, контурным фильтром 413, блоком 414 суммирования с накоплением и блоком 415 преобразования данных, которые соединяются в контур.
[0035]
Умножитель 411 матрицы вращения вращает фазу принятых символов, ассоциированных с каждым из сигнала основной полосы Ich и сигнала основной полосы Qch, которые оцифрованы А/Ц-преобразователем 230, в соответствии с выходной информацией блока 415 преобразования данных, чтобы компенсировать фазовую ошибку. Выходной сигнал умножителя 411 матрицы вращения вводится в блок 412 обнаружения фазы.
[0036]
Блок 412 обнаружения фазы обнаруживает фазовую ошибку, оставшуюся в принятых символах, и вводит обнаруженную фазовую ошибку в контурный фильтр 413. Контурный фильтр 413 удаляет ненужную высокочастотную составляющую, включенную в фазовую ошибку, и вводит фазовую ошибку после удаления высокочастотной составляющей в блок 414 суммирования с накоплением. Блок 414 суммирования с накоплением формирует информацию о фазовой ошибке для назначения величины чередования фаз в умножителе 411 матрицы вращения на основе входного сигнала от контурного фильтра 413 и вводит сформированную информацию о фазовой ошибке в блок 415 преобразования данных. Блок 415 преобразования данных преобразует информацию о фазовой ошибке, введенную блоком 414 суммирования с накоплением, в данные синуса и данные косинуса, ассоциированные с введенной информацией о фазовой ошибке, и вводит преобразованные данные в умножитель 411 матрицы вращения.
[0037]
Как описано выше, можно реализовать устойчивое состояние с фазовой синхронизацией благодаря работе фазовой автоподстройки частоты, составленной умножителем 411 матрицы вращения, блоком 412 обнаружения фазы, контурным фильтром 413, блоком 414 суммирования с накоплением и блоком 415 преобразования данных, которые соединяются в контур, посредством этого компенсируя фазовую ошибку.
[0038]
Отметим, что принятые символы, фазовая ошибка которых компенсируется умножителем 411 матрицы вращения, также вводятся в блок 242 восстановления символов QAM в устройстве 240 восстановления несущей, а также в блок 412 обнаружения фазы.
[0039]
Как описано выше, устройство 241A компенсации фазовой ошибки, проиллюстрированное на фиг. 4A, выполняет компенсацию фазовой ошибки путем фазовой автоподстройки частоты и реализует повышение устойчивости к ошибкам с помощью процесса исправления ошибок, выполняемого на последующем этапе. Однако может быть сложно получить достаточно улучшенную частоту появления ошибочных битов в зависимости от величины фазового шума, включенного в сигнал основной полосы для вывода из детектора 210, или вследствие ухудшения точности блока 412 обнаружения фазы, обусловленного тепловым шумом или т. п.
[0040]
Фиг. 4B - блок-схема, иллюстрирующая конфигурацию устройства 241B компенсации фазовой ошибки в качестве базовой методики. Путем замены устройства 241 компенсации фазовой ошибки, проиллюстрированного на фиг. 2B, устройством 241B компенсации фазовой ошибки, проиллюстрированным на фиг. 4B, конфигурируется устройство демодуляции в качестве базовой методики. Устройство 241B компенсации фазовой ошибки, проиллюстрированное на фиг. 4B, применяет способ демодуляции, в котором сглаживающая фазовая автоподстройка частоты (S-PLL), являющаяся усовершенствованной фазовой автоподстройкой частоты, используется для повышения точности компенсации фазовой ошибки.
[0041]
Устройство 241B компенсации фазовой ошибки, применяющее сглаживающую фазовую автоподстройку частоты, составлено буфером 421, двумя фазовыми автоподстройками 422 и 423 частоты и блоком 424 усреднения. Буфер 421 временно сохраняет входные данные в устройство 241B компенсации фазовой ошибки и вводит один из двух типов последовательностей данных, то есть последовательность данных в порядке ввода и последовательность данных, чей порядок противоположен порядку ввода, в одну из фазовых автоподстроек 422 и 423 частоты и вводит другой из двух типов последовательностей данных в другую из фазовых автоподстроек 422 и 423 частоты. Каждая из фазовых автоподстроек 422 и 423 частоты обрабатывает входные данные и вводит результат обработки в блок 424 усреднения. Блок 424 усреднения вычисляет среднее двух данных, которые обрабатываются в разных порядках, и выводит результат вычисления.
[0042]
Однако вышеупомянутая сглаживающая фазовая автоподстройка частоты может содержать проблему в том, что точность компенсации фазовой ошибки для теплового шума становится практически равной точности, полученной с помощью обычной фазовой автоподстройки частоты, когда относящееся к тепловому шуму SNR большое, и не наблюдается улучшения, присущего повышенному объему вычисления.
[0043]
<<Конфигурация устройства компенсации фазовой ошибки в примерном варианте осуществления>>
Фиг. 3 - блок-схема, иллюстрирующая конфигурацию устройства 241 компенсации фазовой ошибки в примерном варианте осуществления. Устройство 241 компенсации фазовой ошибки в примерном варианте осуществления принимает принятые символы, оценивает фазовую ошибку, обусловленную фазовым шумом опорного генератора, и выводит принятые символы, фазовая ошибка которых компенсируется.
[0044]
Проиллюстрированное на фиг. 3 устройство 241 компенсации фазовой ошибки снабжается фильтром 301 обнаружения фазовой ошибки для принятых символов в прямой последовательности, фильтром 302 обнаружения фазовой ошибки для принятых символов в обратной последовательности, буферами 303 и 304 FILO и блоком 300 сложения фазовых ошибок. Кроме того, устройство 241 компенсации фазовой ошибки снабжается блоком 306 преобразования данных, умножителем 305 матрицы вращения, буфером 307 FILO и блоком 308 формирования параметров.
[0045]
Фильтр 301 обнаружения фазовой ошибки принимает принятые символы в прямой последовательности и выводит разность между фазой принятых символов в прямой последовательности и фазой оценочных переданных символов, сформированных внутри устройства 241 компенсации фазовой ошибки, и оценочное значение фазовой ошибки, сформированной в фазе принятых символов, обусловленной фазовым шумом. Фильтр 302 обнаружения фазовой ошибки принимает принятые символы в обратной последовательности и выводит разность между фазой принятых символов в обратной последовательности и фазой оценочных переданных символов, сформированных внутри устройства 241 компенсации фазовой ошибки, и оценочное значение фазовой ошибки, сформированной в фазе принятых символов, обусловленной фазовым шумом.
[0046]
Каждый из буферов 303 и 304 FILO является временным запоминающим устройством типа "первым пришел - последним обслужен", которое сохраняет принятые символы и выходную последовательность данных из фильтра 301 обнаружения фазовой ошибки предварительно определенное фиксированное количество раз и выводит принятые символы и выходную последовательность данных в порядке, обратном порядку ввода. Кроме того, буфер 307 FILO является временным запоминающим устройством типа "первым пришел - последним обслужен", которое преобразует принятые символы в обратной последовательности, фазовая ошибка которых компенсируется, в принятые символы в прямой последовательности. Отметим, что можно подключить запоминающее устройство предварительно определенной емкости вместо буфера 307 FILO, чтобы управлять адресами записи и адресами чтения.
[0047]
Блок 300 сложения фазовых ошибок выводит оценочное значение фазовой ошибки, сформированной в фазе принятых символов, обусловленной фазовым шумом, на основе входного сигнала от фильтров 301 и 302 обнаружения фазовой ошибки. Значение 304a оценки фазовой ошибки, чья последовательность обращена относительно значения 301a оценки фазовой ошибки из фильтра 301 обнаружения фазовой ошибки с помощью буфера 304 FILO, и значение 302a оценки фазовой ошибки и значение 302b разности фаз из фильтра 302 обнаружения фазовой ошибки вводятся в проиллюстрированное на фиг. 3 устройство 241 компенсации фазовой ошибки.
[0048]
Блок 306 преобразования данных принимает значение 300a оценки фазовой ошибки, которое является выходными данными из блока 300 сложения фазовых ошибок, и выводит данные фазовой компенсации, составленные значением синуса и значением косинуса входного значения. Умножитель 305 матрицы вращения принимает принятые символы и значение синуса и значение косинуса, которые являются выходным сигналом блока 306 преобразования данных, умножает матрицу вращения, в качестве компонентов включающую в себя значение синуса и значение косинуса, на принятые символы для вращения фазы и выводит результат умножения через буфер 307 FILO.
[0049]
Блок 308 формирования параметров формирует коэффициенты K1 - K5, которые используются в одном из процесса фильтров 301 и 302 обнаружения фазовой ошибки и процесса блока 300 сложения фазовых ошибок, на основе параметра фазового шума в опорном генераторе 220 и отношения сигнал-шум.
[0050]
(Работа устройства компенсации фазовой ошибки)
Далее описывается работа устройства 241 компенсации фазовой ошибки, проиллюстрированного на фиг. 3. Устройство 241 компенсации фазовой ошибки принимает принятые символы, компенсирует фазовую ошибку, включающую в себя фазу принятых символов, и выводит принятые символы после компенсации фазовой ошибки. Принятыми символами, введенными в устройство 241 компенсации фазовой ошибки, являются r(1), r(2), …, r(M) (где M - положительное целое число). Когда предполагается, что переданными символами, ассоциированными с принятыми символами, являются s(1), s(2), …, s(M), фазовым шумом, вызванным генератором, является θ(1), θ(2), …, θ(M), и шумом, обусловленным тепловым шумом, является w(1), w(2), …, w(M), принятые символы могут выражаться Уравнением (1).
[0051]
[Математическое выражение 1]

[0052]
Здесь e - постоянная Непера, а j - мнимая единица.
[0053]
Тепловой шум является белым шумом, чей спектр равномерен. Однако спектр фазового шума не равномерный. В качестве примера описывается случай, в котором спектр фазового шума имеет форму, которая проиллюстрирована на фиг. 8.
[0054]
Символы для опорной фазы, которые являются дополнительным входным сигналом в устройство 241 компенсации фазовой ошибки, проиллюстрированное на фиг. 3, указываются с помощью a(1), a(2), …, a(M). Когда переданные символы понятны заранее, предполагается, что символы для опорной фазы совпадают с переданными символами. Когда переданные символы не понятны, и когда можно использовать оценочные переданные символы после исправления ошибок, которые получаются после процесса исправления ошибок, предполагается, что символы для опорной фазы совпадают с оценочными переданными символами. Кроме того, когда невозможно использовать переданные символы и оценочные переданные символы после исправления ошибок, используются оценочные переданные символы, формируемые внутри устройства 241 компенсации фазовой ошибки. Поэтому, когда используются переданные символы и оценочные переданные символы после исправления ошибок, символы для опорной фазы не используются, хотя символы для опорной фазы вводятся извне.
Когда используются оценочные переданные символы, формируемые внутри устройства 241 компенсации фазовой ошибки, ввод символов для опорной фазы считается равным NULL (нулю). Отметим, что проиллюстрированное на фиг. 3 устройство 241 компенсации фазовой ошибки использует оценочные переданные символы, формируемые внутри устройства 241 компенсации фазовой ошибки.
[0055]
Символы, введенные в устройство 241 компенсации фазовой ошибки, вводятся в фильтр 301 обнаружения фазовой ошибки. Фильтр 301 обнаружения фазовой ошибки вычисляет значение оценки фазовой ошибки и значение разности фаз на основе принятых символов и оценочных переданных символов и выводит результат вычисления. Каждое из выходных данных является численным значением, представляющим фазу. Выходные данные, относящиеся к значению оценки фазовой ошибки у фильтра 301 обнаружения фазовой ошибки, указываются с помощью θ+(1), θ+(2), …, θ+(M). Выходные данные, относящиеся к значению разности фаз, указываются с помощью φ(1), φ(2), …, φ(M).
Отметим, что в проиллюстрированном на фиг. 3 примере не используется значение разности фаз для вывода из фильтра 301 обнаружения фазовой ошибки.
[0056]
Принятые символы и значение 301a оценки фазовой ошибки из фильтра 301 обнаружения фазовой ошибки временно сохраняются соответственно в буферах 303 и 304 FILO и выводятся в порядке, обратном порядку ввода. В частности, когда принятые символы вводятся в порядке r(1), r(2), r(M), принятые символы выводятся в порядке r(M), r(M-1), r(1). Кроме того, когда выходные данные, относящиеся к значению оценки фазовой ошибки, вводятся в порядке θ+(1), θ+(2), …, θ+(M), выходные данные выводятся в порядке θ+(M), θ+(M-1), …, θ+(1). Принятые символы, выведенные соответственно из буферов 303 и 304 FILO, вводятся в фильтр 302 обнаружения фазовой ошибки, а значение 304a оценки фазовой ошибки вводится в блок 300 сложения фазовых ошибок.
[0057]
Аналогично фильтру 301 обнаружения фазовой ошибки, фильтр 302 обнаружения фазовой ошибки вычисляет значение 302a оценки фазовой ошибки и значение 302b разности фаз на основе принятых символов и оценочных переданных символы и выводит результат вычисления. Фильтр 302 обнаружения фазовой ошибки отличается от фильтра 301 обнаружения фазовой ошибки в части порядка ввода и задания начального значения. Принятые символы вводятся из буфера 303 FILO в фильтр 302 обнаружения фазовой ошибки в порядке r(M), r(M-1), …, r(1). Кроме того, начальное значение устанавливается на основе коэффициента K3. Выходные данные, относящиеся к оценке фазовой ошибки фильтром 302 обнаружения фазовой ошибки, указываются с помощью θ-(M), θ-(M-1), …, θ-(1). Выходной сигнал значения разности фаз указывается с помощью φ(M), φ(M-1), …, φ(1) с использованием тех же символов, что используются в выходном сигнале фильтра 301 обнаружения фазовой ошибки.
[0058]
Каждый из выходных сигналов фильтров 301 и 302 обнаружения фазовой ошибки вводится в блок 300 сложения фазовых ошибок.
Блок 300 сложения фазовых ошибок объединяет значение 304a или 302a оценки фазовой ошибки и значение 302b разности фаз и выводит значение 300a оценки фазовой ошибки. Выходной сигнал 300a блока сложения фазовых ошибок указывается с помощью θ±(M), θ±(M-1), …, θ±(1).
[0059]
Выходной сигнал блока 300 сложения фазовых ошибок преобразуется в данные синуса sin(θ±(M)), sin(θ±(M-1)), …, sin(θ±(1)) и данные косинуса cos(θ±(M)), cos(θ±(M-1)), …, cos (θ±(1)). Данные синуса и данные косинуса вводятся в умножитель 305 матрицы вращения, и фаза принятых символов компенсируется. Выходной сигнал умножителя 305 матрицы вращения, чей порядок меняется буфером 307 FILO на противоположный, является выходными данными устройства 241 компенсации фазовой ошибки. Выходные данные можно выразить Уравнением (2) с использованием вышеупомянутой нотации.
[0060]
[Математическое выражение 2]

[0061]
(Конфигурация фильтра обнаружения фазовой ошибки)
Фиг. 5 - блок-схема, иллюстрирующая конфигурацию фильтров 301 и 302 обнаружения фазовой ошибки в примерном варианте осуществления. Отметим, что фильтры 301 и 302 обнаружения фазовой ошибки имеют одинаковую конфигурацию за исключением того, что фильтр 302 обнаружения фазовой ошибки задает начальное значение на основе коэффициента K3. Поэтому конфигурации фильтров 301 и 302 обнаружения фазовой ошибки совместно используются фиг. 5.
[0062]
Каждый из проиллюстрированных на фиг. 5 фильтров 301 и 302 обнаружения фазовой ошибки принимает принятые символы и выводит разность между фазой принятых символов и фазой оценочных переданных символов, и оценочное значение фазовой ошибки, сформированной в фазе принятых символов, обусловленной фазовым шумом.
[0063]
Каждый из проиллюстрированных на фиг. 5 фильтров 301 и 302 обнаружения фазовой ошибки снабжается блоком 503 обнаружения фазы, одноотводным фильтром 504, блоком 505 суммирования с накоплением, снабженным коэффициентом обратной связи, блоком 506 преобразования данных, умножителем 501 матрицы вращения и блоком 502 определения.
[0064]
Блок 503 обнаружения фазы принимает выходные символы из умножителя 501 матрицы вращения и выходные символы из блока 502 определения, и выводит значение разности фаз между этими выходными символами. Выходные данные служат в качестве входного сигнала в одноотводный фильтр 504, который предоставляется на последующем этапе блока 503 обнаружения фазы. Выходные данные добавляются к выходному сигналу блока 505 суммирования с накоплением, снабженного коэффициентом обратной связи, с помощью сумматора 507. Тогда результат сложения служит в качестве значения 301b или 302b разности фаз, которое является одним из выходных сигналов фильтра 301 или 302 обнаружения фазовой ошибки.
[0065]
Одноотводный фильтр 504 является фильтром, чье количество отводов равно одному, для удаления высокочастотной составляющей. Одноотводный фильтр 504 составлен умножителем 541. Одноотводный фильтр 504 принимает выходной сигнал блока 503 обнаружения фазы, умножает выходной сигнал на коэффициент K2 отведения и выводит результат умножения. Коэффициент K2 отведения задается блоком 308 формирования параметров. Отметим, что коэффициент K2 отведения представляет степень отражения внезапно сформированного шума для компенсации фазовой ошибки, и его значение значительно меньше 1.
[0066]
Блок 505 суммирования с накоплением, снабженный коэффициентом обратной связи, составлен сумматором 551, триггером 552 и умножителем 553. Блок 505 суммирования с накоплением принимает выходной сигнал одноотводного фильтра 504 и выводит данные, хранимые в триггере 552. Отметим, что в фильтре 302 обнаружения фазовой ошибки в качестве начального значения в триггере 552 устанавливается значение на основе начального коэффициента K3. Выходным сигналом сумматора 505 с накоплением, снабженного коэффициентом обратной связи, является значение 301a или 302a оценки фазовой ошибки, которое является одним из выходных сигналов фильтра 301 или 302 обнаружения фазовой ошибки и служит в качестве входного сигнала в блок 506 преобразования данных и в сумматор 507. Кроме того, коэффициент K1 обратной связи умножителя 553 задается блоком 308 формирования параметров. Отметим, что коэффициент K1 обратной связи представляет степень отражения влияния ранее принятых символов на компенсацию фазовой ошибки, и его значение меньше 1.
[0067]
Блок 506 преобразования данных принимает значение оценки фазовой ошибки, выведенное блоком 505 суммирования с накоплением, и выводит значение синуса и значение косинуса, ассоциированные со значением оценки фазовой ошибки. Умножитель 501 матрицы вращения умножает матрицу вращения, в качестве компонентов включающую в себя значение синуса и значение косинуса, которые являются выходным сигналом блока 506 преобразования данных, на принятые символы, отображенные в виде комплексных чисел, и вращает фазу принятых символов на численное значение, соответствующее выходному сигналу блока 505 суммирования с накоплением, чтобы компенсировать фазу.
[0068]
Блок 502 определения принимает принятые символы, фаза которых компенсируется умножителем 501 матрицы вращения, и вводит переданные символы, ближайшие к введенным принятым символам, в блок 503 обнаружения фазы.
[0069]
(Работа фильтра обнаружения фазовой ошибки)
Далее описывается работа каждого из фильтров 301 и 302 обнаружения фазовой ошибки. Хотя устройство 241 компенсации фазовой ошибки снабжается фильтрами 301 и 302 обнаружения фазовой ошибки, работа по формированию выходных данных в соответствии с входными данными у фильтров 301 и 302 обнаружения фазовой ошибки одинакова. Поэтому в качестве примера описывается работа фильтра 301 обнаружения фазовой ошибки. Отметим, что в качестве начальной настройки необходимо установить начальное значение триггера 552 в блоке 505 суммирования с накоплением, снабженном коэффициентом обратной связи, в определенное подходящее значение. Пока специально не указано иное, начальное значение устанавливается в "0".
[0070]
Принятые символы, введенные в фильтр 301 обнаружения фазовой ошибки, вводятся в умножитель 501 матрицы вращения. Аналогично умножителю 305 матрицы вращения, умножитель 501 матрицы вращения вращает фазу принятых символов в соответствии с выходными данными из блока 506 преобразования данных. Когда предполагается, что введенные принятые символы в момент времени n указываются с помощью r(n), а хранимые в триггере 552 данные указываются с помощью θ+(n) (где n - целое число не меньше 1, но не больше M), выходной сигнал умножителя 501 матрицы вращения может выражаться Уравнением (3).
[0071]
[Математическое выражение 3]

[0072]
Выходной сигнал умножителя 501 матрицы вращения, выраженный Уравнением (3), вводится в блок 502 определения и в блок 503 обнаружения фазы. Блок 502 определения выводит переданные символы, ближайшие к данным, выраженным Уравнением (3). Выходной сигнал блока 502 определения вводится в блок 503 обнаружения фазы. Блок 503 обнаружения фазы вычисляет разность фаз между двумя входными символами и выводит результат вычисления. Когда предполагается, что разность фаз между принятыми символами и выходными символами из блока 502 определения указывается с помощью φ(1), φ(2), …, φ(M), выходным сигналом блока 503 обнаружения фазы в момент времени n является численное значение, выраженное Уравнением (4) на основе Уравнения (3).
[0073]
[Математическое выражение 4]

[0074]
Выходной сигнал блока 503 обнаружения фазы вводится в одноотводный фильтр 504 и в сумматор 507.
Другим входным сигналом в сумматор 507 является выходной сигнал фазовой ошибки θ+(1), θ+(2), …, θ+(M). Поэтому по Уравнению (4) выходным сигналом сумматора 507 являются значения φ(1), φ(2), …, φ(M) разности фаз. С другой стороны, в одноотводном фильтре 504 выходной сигнал блока 503 обнаружения фазы и коэффициент K2 отведения, поступающий из блока 308 формирования параметров, умножаются с помощью умножителя 541. Затем результат умножения вводится в блок 505 суммирования с накоплением, снабженный коэффициентом обратной связи.
[0075]
Сумматор 551 в блоке 505 суммирования с накоплением, снабженном коэффициентом обратной связи, складывает выходной сигнал одноотводного фильтра 504 и данные триггера 552, которые умножаются с помощью умножителя 553 на коэффициент K1 обратной связи, поступающий из блока 308 формирования параметров. Затем данные триггера 552 обновляются на основе результата сложения. Данные θ+(n) триггера 552, которые хранятся в момент времени n, обновляются в следующий момент времени (n+1), как выражено Уравнением (5).
[0076]
[Математическое выражение 5]

[0077]
Выходные данные триггера 552 выводятся из фильтра 301 обнаружения фазовой ошибки в качестве значения 301a оценки фазовой ошибки и используются для вращения фазы введенных принятых символов r(n+1) в момент времени (n+1) блоком 506 преобразования данных. После этого с помощью такой же операции, как описана выше, формируются и выводятся значения θ+(1), θ+(2), …, θ+(M) оценки фазовой ошибки и значения φ(1), φ(2), …, φ(M) разности фаз.
[0078]
Отметим, что данные θ+(M+1) формируются по вышеупомянутой процедуре, заданной Уравнением (5), из M-ого введенного принятого символа r(M) и данных θ+(M) триггера 552 в момент времени M. Затем данные θ+(M+1) используются в качестве начального значения триггера 552 в фильтре 302 обнаружения фазовой ошибки. Фильтр 302 обнаружения фазовой ошибки формирует и выводит значения θ-(M), θ-(M-1), …, θ-(1) оценки фазовой ошибки в соответствии с процедурой, выраженной Уравнением (6).
[0079]
[Математическое выражение 6]

[0080]
(Конфигурация блока сложения фазовых ошибок)
Фиг. 6 - блок-схема, иллюстрирующая конфигурацию блока 300 сложения фазовых ошибок в примерном варианте осуществления. Блок 300 сложения фазовых ошибок принимает выходной сигнал из фильтра 301 или 302 обнаружения фазовой ошибки и выводит оценочное значение фазовой ошибки, сформированной в фазе принятых символов, обусловленной фазовым шумом.
[0081]
Блок 300 сложения фазовых ошибок, проиллюстрированный на фиг. 6, снабжается двумя сумматорами 601 и 604 и двумя умножителями 602 и 603. Сумматор 601 складывает значение 304a оценки фазовой ошибки в обратной последовательности из фильтра 301 обнаружения фазовой ошибки и значение 302a оценки фазовой ошибки из фильтра 302 обнаружения фазовой ошибки, и вводит результат сложения в умножитель 602. Умножитель 602 умножает результат сложения сумматором 601 на коэффициент K4 умножения, сформированный блоком 308 формирования параметров, и вводит результат умножения в сумматор 604.
[0082]
Умножитель 603 умножает коэффициент K5 умножения, сформированный блоком 308 формирования параметров, на значение 302b разности фаз из фильтра 302 обнаружения фазовой ошибки и вводит результат умножения в сумматор 604.
[0083]
Сумматор 604 складывает входной сигнал от умножителя 602 и входной сигнал от умножителя 603, и задает результат сложения в качестве выходного сигнала 300 блока сложения фазовых ошибок.
[0084]
(Работа блока сложения фазовых ошибок)
Далее описывается работа блока 300 сложения фазовых ошибок. Блок 300 сложения фазовых ошибок принимает выходной сигнал из фильтров 301 и 302 обнаружения фазовой ошибки и выводит значение 300a оценки фазовой ошибки. Сумматор 601 последовательно вычисляет θ+(n)+θ-(n), где n=M, M-1, …, 1, на основе значения 301a оценки фазовой ошибки, то есть θ+(1), θ+(2), …, θ+(M), и значения 302a оценки фазовой ошибки, то есть θ-(M), θ-(M-1), …, θ-(1). Затем умножитель 602 умножает коэффициент K4 умножения, поступающий из блока 308 формирования параметров, на θ+(n)+θ-(n) и получает K4×(θ+(n)+θ-(n)), где n=M, M-1, …, 1. С другой стороны, умножитель 603 умножает коэффициент K5 умножения, поступающий из блока 308 формирования параметров, на значение 302b разности фаз из фильтра 302 обнаружения фазовой ошибки и получает K5×φ(M), K5×φ(M-1), …, K5×φ(1).
[0085]
Выходной сигнал умножителя 602 и выходной сигнал умножителя 603 складываются сумматором 604, и получается значение 300a оценки фазовой ошибки, то есть θ±(M), θ±(M-1), …, θ±(1), как выражено Уравнением (7).
В частности, коэффициенты K4 и K5 умножения играют роль весового коэффициента, который отражает одно из значения оценки фазовой ошибки, выведенного из фильтра 301 или 302 обнаружения фазовой ошибки, и значения разности фаз в соответствии с надежностью относительно значения 300a оценки фазовой ошибки.
[0086]
[Математическое выражение 7]

[0087]
(Конфигурация блока формирования параметров)
Фиг. 7A - блок-схема, иллюстрирующая конфигурацию блока 308 формирования параметров в настоящем примерном варианте осуществления.
[0088]
Блок 308 формирования параметров, проиллюстрированный на фиг. 7A, снабжается блоком 710 получения значения шумовой характеристики, блоком 720 вычисления коэффициентов, таблицей 730 для вычисления коэффициентов и блоком 740 хранения коэффициентов. Блок 710 получения значения шумовой характеристики получает значение шумовой характеристики у опорного генератора 220. Отметим, что значение шумовой характеристики у опорного генератора 220 может вводиться оператором вручную либо может обнаруживаться устройством автоматически. Блок 720 вычисления коэффициентов вычисляет коэффициенты K1 - K5 в соответствии с предварительно определенным алгоритмом с использованием таблицы 730 для вычисления коэффициентов. Блок 740 хранения коэффициентов хранит коэффициенты K1 - K5, вычисленные блоком 720 вычисления коэффициентов. Отметим, что может быть так, что вычисление коэффициентов K1 - K5 выполняется дополнительно подготовленным компьютером, и результат вычисления сохраняется в блоке 740 хранения коэффициентов.
[0089]
(Таблица для вычисления коэффициентов)
Фиг. 7B - схема, иллюстрирующая конфигурацию таблицы 730 для вычисления коэффициентов в настоящем примерном варианте осуществления. Таблица 730 для вычисления коэффициентов используется для формирования коэффициентов K1 - K5 с помощью блока 720 вычисления коэффициентов на основе значения шумовой характеристики у опорного генератора 220.
[0090]
В таблице 730 для вычисления коэффициентов элемент хранения 732 промежуточных значений и элемент хранения 733 коэффициентов хранятся совместно с элементом хранения 731 значений шумовой характеристики. Элемент хранения 731 значений шумовой характеристики хранит fp, fz, fs, Kpn и σw2, которые являются значениями шумовой характеристики у опорного генератора 220, необходимыми для вычисления коэффициентов. Элемент хранения 732 промежуточных значений хранит, например, a0, a1, b1, α, γ, λ и η, которые являются промежуточными значениями для вычисления коэффициентов. Элемент хранения 733 коэффициентов хранит вычисленные коэффициенты K1, K2, K3, K4 и K5.
[0091]
(Работа блока формирования параметров)
Далее описывается вычисление коэффициентов K1 - K5.
[0092]
Фиг. 8 - схема, иллюстрирующая пример спектра фазового шума у опорного генератора для формирования параметров в настоящем примерном варианте осуществления. В нижеследующем вычислении коэффициентов K1 - K5 описывается пример, в котором спектр фазового шума у опорного генератора моделируется, как проиллюстрировано на фиг. 8. Как проиллюстрировано на фиг. 8, спектр фазового шума постоянный, когда частота не превышает fp (Гц), но не меньше fz (Гц). Спектр фазового шума имеет градиентные характеристики -20 дБн/декада между fp (Гц) и fz (Гц). Как проиллюстрировано на фиг. 8, спектральная плотность мощности на частоте 0 (Гц) указывается Kpn, а скорость передачи символов указывается fs (Гц). Фазовый шум опорного генератора 220 обозначается четырьмя параметрами fp, fz, fs и Kpn. Шум обозначается пятью параметрами, включающими параметр σw2, который относится к дисперсии теплового шума, в дополнение к вышеупомянутым четырем параметрам.
[0093]
Блок 308 формирования параметров на основе пяти этих параметров формирует коэффициент K1 обратной связи, относящийся к фильтрам 301 и 302 обнаружения фазовой ошибки, коэффициент K2 отведения, начальный коэффициент K3, относящийся к фильтру 302 обнаружения фазовой ошибки, и коэффициенты K4 и K5 умножения, относящиеся к блоку 300 сложения фазовых ошибок. Ниже описывается пример процесса для формирования коэффициентов.
[0094]
Три постоянных a0, a1 и b1 задаются Уравнением (8).
[0095]
[Математическое выражение 8]

[0096]
Отметим, что отношение длины окружности к ее диаметру указывается с помощью π.
[0097]
Две постоянных α и γ задаются Уравнением (9) с использованием трех постоянных a0, a1 и b1, определенных Уравнением (8).
[0098]
[Математическое выражение 9]

[0099]
Постоянные λ и η задаются Уравнением (10) на основе α и γ, выраженных в Уравнении (9), и b1, выраженной в Уравнении (8), и дополнительно на основе постоянной σw2, которая определяется из значения дисперсии теплового шума.
[0100]
[Математическое выражение 10]

[0101]
Коэффициент K1 обратной связи и коэффициент K2 отведения, формируемые блоком 308 формирования параметров, вычисляются по Уравнению (11).
[0102]
[Математическое выражение 11]

[0103]
Коэффициенты K4 и K5 умножения, формируемые блоком 308 формирования параметров, вычисляются по Уравнению (12).
[0104]
[Математическое выражение 12]

[0105]
Кроме того, начальный коэффициент K3 задается в виде Уравнения (13) с помощью b1, λ и K1, выраженных соответственно в Уравнении (8), Уравнении (10) и Уравнении (11).
[0106]
[Математическое выражение 13]

[0107]
<<Процедура обработки по способу компенсации фазового шума>>
Фиг. 9 - блок-схема алгоритма, иллюстрирующая процедуру обработки по способу компенсации фазового шума в настоящем примерном варианте осуществления. Блок-схема алгоритма ассоциируется с программой компенсации фазовой ошибки для исполнения посредством CPU, составляющего устройство 241 компенсации фазовой ошибки, с использованием RAM. Блок-схема алгоритма реализует каждый из блоков функциональной конфигурации, проиллюстрированных на фиг. 3.
[0108]
На этапе S901 устройство 241 компенсации фазовой ошибки выполняет инициализацию (k←0; θ+(1)←0). В этом примере из двух параметров, которые нужно инициализировать, k является индексом, указывающим кадр обработки, а θ+(1) является значением оценки фазовой ошибки на основе принятых символов в прямой последовательности в момент времени 1.
[0109]
На этапе S903 устройство 241 компенсации фазовой ошибки формирует последовательность значений φ(1), φ(2), …, φ(M) разности фаз между принятыми символами и оценочными переданными символами и выполняет инициализацию (n←1). В этом примере M - положительное целое число, представляющее длину кадра в качестве единицы обработки.
[0110]
На этапе S905 устройство 241 компенсации фазовой ошибки последовательно вычисляет из последовательности значений разности фаз значения θ+(1), θ+(2), …, θ+(M), θ+(M+1) оценки фазовой ошибки, обусловленные фазовым шумом, включенным в последовательность значений разности фаз, в соответствии с Уравнением (5).
[0111]
На этапе S907 устройство 241 компенсации фазовой ошибки инициализирует θ-(M) с использованием θ+(M+1). В этом примере θ-(M) является значением оценки фазовой ошибки на основе принятых символов в обратной последовательности в момент времени M.
[0112]
На этапе S909 устройство 241 компенсации фазовой ошибки последовательно вычисляет значения θ-(M), θ-(M-1), …, θ-(1) оценки фазовой ошибки из последовательности значений φ(M), φ(M-1), …, φ(1) разности фаз в соответствии с Уравнением (6). Кроме того, на этапе S907 устройство 241 компенсации фазовой ошибки вычисляет значения θ±(1), θ±(2), …, θ±(M) оценки фазовой ошибки путем линейного вычисления значений θ+(1), θ+(2), …, θ+(M) оценки фазовой ошибки, значений θ-(1), θ-(2), …, θ-(M) оценки фазовой ошибки и значений φ(1), φ(2), …, φ(M) разности фаз в соответствии с Уравнением (7).
[0113]
На этапе S911 устройство 241 компенсации фазовой ошибки последовательно повторяет вычисление значений θ+(kM+i) оценки фазовой ошибки (где i=1 до M+1), θ-(kM+i) (где i=1 до M) и θ±(kM+i) (где i=1 до M), которые включаются в разности φ(kM+1), φ(kM+2), …, φ((k+1)M) фаз касательно положительного целого k, на основе процесса каждого этапа, который описан выше. Затем устройство 241 компенсации фазовой ошибки выводит значения θ±(kM+1), θ±(kM+2), …, θ±((k+1)M) оценки фазовой ошибки.
[0114]
Каждый из вышеупомянутых этапов повторяется касательно положительного целого k, допуская, что положительное целое равно k+1 таким же образом, как описано выше. Когда положительное целое k достигает предварительно определенного целого значения (L-1), обработка прекращается. С помощью вышеупомянутой процедуры можно вычислять значения θ±(1), …, θ±(kM+2), …, θ±(LM) оценки фазовой ошибки относительно разностей φ(1), …, φ(kM+2), …, φ(LM) фаз.
[0115]
Тогда фазовая ошибка компенсируется соответственно путем вычитания вычисленных значений θ±(kM+1), θ±(kM+2), …, θ±((k+1)M) оценки фазовой ошибки из разностей φ(kM+1), φ(kM+2), …, φ((k+1)M) фаз.
[0116]
<<Результат компенсации фазовой ошибки>>
Фиг. 10 - графики, иллюстрирующие связь между среднеквадратической ошибкой и отношением несущей к шуму, относящуюся к фазовой ошибке, когда выполняется модуляция QPSK и когда выполняется модуляция 256QAM с использованием способа компенсации фазовой ошибки в примерном варианте осуществления по сравнению с традиционным способом.
[0117]
В проиллюстрированном на фиг. 10 примере четыре параметра fp, fz, fs и Kpn соответственно задаются как fp=100 Гц, fz=7 МГц, fs=24 МГц и Kpn=-35 дБн/Гц в спектре фазового шума, проиллюстрированном на фиг. 8. Передача данных выполняется соответственно путем модуляции QPSK и модуляции 256QAM в канале связи, включающем фазовый шум, задаваемый вышеупомянутыми параметрами. Среднеквадратическая ошибка, относящаяся к фазе после компенсации по способу компенсации фазовой ошибки в примерном варианте осуществления, сравнивается со среднеквадратической ошибкой в фазовой автоподстройке частоты по базовой методике, проиллюстрированной на фиг. 3A. Результат сравнения иллюстрируется на фиг. 10.
[0118]
Горизонтальная ось обозначает отношение несущей к шуму, обусловленное тепловым шумом, а вертикальная ось обозначает среднеквадратическую ошибку в показателях дБ. Метки • (кружок) и ▲ (треугольник), проиллюстрированные на фиг. 10, представляют соответственно результаты моделирования среднеквадратической ошибки, относящиеся к компенсации фазовой ошибки путем фазовой автоподстройки частоты и относящиеся к способу компенсации фазовой ошибки в настоящем примерном варианте осуществления. При моделированиях ввод символов для опорной фазы считается равным NULL. Кроме того, сплошные линии и пунктирные линии, проиллюстрированные на фиг. 10, представляют соответственно теоретические значения среднеквадратической ошибки. В области, где отношение несущей к шуму большое, теоретические значения совпадают с моделированиями.
[0119]
Как понятно из примера, проиллюстрированного на фиг. 10, заметное улучшение наблюдается как в способе модуляции QPSK, так и в способе модуляции 256QAM.
[0120]
В настоящем примерном варианте осуществления фазовая ошибка компенсируется путем объединения значения оценки фазовой ошибки и значения разности фаз, которые формируются на основе принятых символов в прямой последовательности и в обратной последовательности. Отметим, что в настоящем примерном варианте осуществления компенсация фазовой ошибки реализуется путем устранения избыточной конфигурации. Поэтому с помощью упрощенной конфигурации можно выполнять передачу данных большого объема и высокого качества с улучшенной частотой появления ошибочных битов даже в неблагоприятном шумовом окружении, преимущественно обусловленном фазовым шумом или тепловым шумом.
[0121]
[Третий примерный вариант осуществления]
Далее описывается устройство компенсации фазовой ошибки в третьем примерном варианте осуществления настоящего изобретения. Устройство компенсации фазовой ошибки в настоящем примерном варианте осуществления отличается от устройства компенсации фазовой ошибки во втором примерном варианте осуществления в том, что блок сложения фазовых ошибок во втором примерном варианте осуществления использует значения разности фаз, сформированные на основе принятых символов в обратной последовательности, тогда как блок сложения фазовых ошибок в третьем примерном варианте осуществления использует значения разности фаз, сформированные на основе принятых символов в прямой последовательности. Остальная конфигурация и работа в третьем примерном варианте осуществления такие же, как конфигурация и работа во втором примерном варианте осуществления. Поэтому такая же конфигурация и работа в третьем примерном варианте осуществления, как и во втором примерном варианте осуществления, указываются одинаковыми ссылочными позициями, и их подробное описание здесь пропускается.
[0122]
<<Конфигурация устройства компенсации фазовой ошибки>>
Фиг. 11 - блок-схема, иллюстрирующая конфигурацию устройства 1141 компенсации фазовой ошибки в настоящем примерном варианте осуществления. Отметим, что на фиг. 11 такие же блоки функциональной конфигурации, как на фиг. 3, указываются одинаковыми ссылочными позициями, и их описание здесь пропускается.
[0123]
Устройство 1141 компенсации фазовой ошибки включает в себя буфер 1109 FILO. Значения разности фаз, выведенные из фильтра 301 обнаружения фазовой ошибки, вводятся в порядке φ(1), φ(2), …, φ(M) и выводятся в порядке φ(M), φ(M-1), …, φ(1). Затем блок 1100 сложения фазовых ошибок вводит оценочное значение 1100a оценки фазовой ошибки в блок 306 преобразования данных с использованием φ(M), φ(M-1), …, φ(1), выведенных из буфера 1109 FILO, в качестве значения разности фазовой ошибки.
[0124]
(Конфигурация блока сложения фазовых ошибок)
Фиг. 12 - блок-схема, иллюстрирующая конфигурацию блока 1100 сложения фазовых ошибок в настоящем примерном варианте осуществления.
Отметим, что на фиг. 12 такие же блоки функциональной конфигурации, как на фиг. 5, указываются одинаковыми ссылочными позициями, и их описание здесь пропускается.
[0125]
Умножитель 1203 умножает коэффициент K5 умножения, поступающий из блока 308 формирования параметров, на φ(M), φ(M-1), …, φ(1), которые являются значениями разности фаз, чья последовательность меняется буфером 1109 FILO на противоположную относительно значения 301b разности фаз из фильтра 301 обнаружения фазовой ошибки, и получает K5×φ(M), K5×φ(M-1), …, K5×φ(1).
Результат умножения из умножителя 1203 добавляется к результату умножения из умножителя 602 с помощью сумматора 604. Затем выводится значение 1100a оценки фазовой ошибки.
[0126]
В соответствии с настоящим примерным вариантом осуществления, хотя добавляется буфер 1109 FILO, можно реализовать более точную компенсацию фазовой ошибки и можно выполнять передачу данных большого объема и высокого качества с улучшенной частотой появления ошибочных битов.
[0127]
Отметим, что можно сконфигурировать так, что в блоке сложения фазовых ошибок предоставляется переключатель перед умножителем 603 или умножителем 1203, и входной сигнал выбирается с помощью переключателя в зависимости от того, в какой из конфигураций второго и третьего примерных вариантов осуществления используется блок сложения фазовых ошибок.
[0128]
[Четвертый примерный вариант осуществления]
Далее описывается устройство компенсации фазовой ошибки в четвертом примерном варианте осуществления настоящего изобретения. Устройство компенсации фазовой ошибки в настоящем примерном варианте осуществления отличается от устройств компенсации фазовой ошибки во втором и третьем примерных вариантах осуществления в том, что декодированные данные, сформированные из символов в результате компенсации фазовой ошибки, обратно преобразуются в переданные символы для эталона, и переданные символы для эталона используются для компенсации фазовой ошибки. Остальная конфигурация и работа в четвертом примерном варианте осуществления такие же, как конфигурация и работа во втором или третьем примерном варианте осуществления. Поэтому такая же конфигурация и работа в четвертом примерном варианте осуществления, как и во втором или третьем примерном варианте осуществления, указываются одинаковыми ссылочными позициями, и их подробное описание здесь пропускается.
[0129]
<<Конфигурация устройства демодуляции>>
Фиг. 13 - блок-схема, иллюстрирующая конфигурацию устройства 1300 демодуляции, включающего в себя устройство 1341 компенсации фазовой ошибки в настоящем примерном варианте осуществления. Отметим, что в устройство 1300 демодуляции включается устройство 1340 восстановления несущей, включающее в себя устройство 1341 компенсации фазовой ошибки.
[0130]
Символы для опорной фазы, которые являются входным сигналом в устройство 1341 компенсации фазовой ошибки, указываются с помощью a(1), a(2), …, a(M). В настоящем примерном варианте осуществления предполагается, что переданные символы не понятны, используются оценочные переданные символы после исправления ошибок, получаемые после выполнения процесса исправления ошибок, и переданные символы совпадают с оценочными переданными символами.
Оценочные переданные символы после исправления ошибок вводятся извне в устройство 1341 компенсации фазовой ошибки.
[0131]
С другой стороны, демодулированные данные, выведенные из декодера 243 с исправлением ошибок, служат в качестве выходного сигнала устройства 1300 демодуляции или служат в качестве входных данных 1344a в устройство 1341 компенсации фазовой ошибки с помощью переключателя 1344. Когда количество раз выполнения компенсации фазовой ошибки в устройстве 1341 компенсации фазовой ошибки достигает предварительно определенного определенного количества раз, или когда определяется, что нет ошибки в декодере 243 с исправлением ошибок, выходной сигнал декодера 243 с исправлением ошибок выводится в виде демодулированных данных из устройства 1300 демодуляции. В противном случае выходной сигнал декодера 243 с исправлением ошибок вводится в устройство 1341 компенсации фазовой ошибки и используется в качестве символов для опорной фазы в устройстве 1341 компенсации фазовой ошибки. С помощью вышеупомянутой обратной связи повторно компенсируется фазовая ошибка в принятых символах, и повышается точность компенсации.
[0132]
<<Конфигурация устройства компенсации фазовой ошибки>>
Фиг. 14 - блок-схема, иллюстрирующая конфигурацию устройства 1341 компенсации фазовой ошибки в настоящем примерном варианте осуществления. Отметим, что на фиг. 14 такие же блоки функциональной конфигурации, как на фиг. 3 или на фиг. 11, указываются одинаковыми ссылочными позициями, и их описание здесь пропускается.
[0133]
Опорные символы 1403a в прямой последовательности или опорные символы в обратной последовательности из блока 1403 отображения символов QAM вводятся в фильтр 1401 или 1402 обнаружения фазовой ошибки и используются для формирования значения оценки фазовой ошибки и значения разности фаз.
Блок 1403 отображения символов QAM формирует опорные символы 1403a в прямой последовательности и опорные символы в обратной последовательности путем отображения входных данных 1344a из декодера 243 с исправлением ошибок, проиллюстрированного на фиг. 13, в виде символов QAM.
[0134]
Отметим, что в проиллюстрированном на фиг. 14 примере, как описано в третьем примерном варианте осуществления, сконфигурировано так, что блок 1100 сложения фазовых ошибок использует значение разности фаз, сформированное на основе принятых символов в прямой последовательности. В качестве альтернативы, как описано во втором примерном варианте осуществления, может быть так, что блок 1100 сложения фазовых ошибок использует значение разности фаз, сформированное на основе принятых символов в обратной последовательности. Кроме того, в проиллюстрированном на фиг. 14 примере блок 1403 отображения символов QAM предоставляется в устройстве компенсации фазовой ошибки, но блок 1403 отображения символов QAM может предоставляться в устройстве восстановления несущей вне схемы компенсации фазовой ошибки.
[0135]
(Конфигурация фильтра обнаружения фазовой ошибки)
Фиг. 15 - блок-схема, иллюстрирующая конфигурацию фильтров 1401 и 1402 обнаружения фазовой ошибки в настоящем примерном варианте осуществления. Отметим, что на фиг. 15 такие же блоки функциональной конфигурации, как на фиг. 5, указываются одинаковыми ссылочными позициями, и их описание здесь пропускается.
[0136]
Переключатель 1508 в качестве входного сигнала принимает выходные символы из блока 502 определения и символы для опорной фазы, которые являются одними из входных данных в фильтр 1401 или 1402 обнаружения фазовой ошибки, и выбирает и выводит одни из входных данных. В устройстве 1341 компенсации фазовой ошибки в настоящем примерном варианте осуществления, когда имеется ввод символов для опорной фазы, переключатель 1508 выбирает символы для опорной фазы. Поэтому выходной сигнал блока 502 определения не используется. С другой стороны, когда символами для опорной фазы являются NULL, всегда выбираются выходные символы блока 502 определения.
[0137]
В настоящем примерном варианте осуществления используются не оценочные переданные символы, сформированные в фильтре обнаружения фазовой ошибки, а оценочные переданные символы, сформированные на основе принятых символов, фаза которых компенсируется устройством компенсации фазовой ошибки. Поэтому можно выполнять передачу данных большого объема и высокого качества с улучшенной частотой появления ошибочных битов.
[0138]
[Пятый примерный вариант осуществления]
Далее описывается устройство компенсации фазовой ошибки в пятом примерном варианте осуществления настоящего изобретения. Устройство компенсации фазовой ошибки в настоящем примерном варианте осуществления отличается от устройств компенсации фазовой ошибки в примерных вариантах осуществления со второго по четвертый в том, что процесс для компенсации фазовой ошибки не выполняется для начальных символов. Остальная конфигурация и работа в пятом примерном варианте осуществления такие же, как конфигурация и работа в примерных вариантах осуществления со второго по четвертый. Поэтому такая же конфигурация и работа в пятом примерном варианте осуществления, как и в примерных вариантах осуществления со второго по четвертый, указываются одинаковыми ссылочными позициями, и их подробное описание здесь пропускается.
[0139]
<<Конфигурация устройства компенсации фазовой ошибки>>
Фиг. 16 - блок-схема, иллюстрирующая конфигурацию устройства 1641 компенсации фазовой ошибки в настоящем примерном варианте осуществления. Отметим, что на фиг. 16 такие же блоки функциональной конфигурации, как на фиг. 3, фиг. 11 или фиг. 14, указываются одинаковыми ссылочными позициями, и их описание здесь пропускается. Отметим, что в проиллюстрированном на фиг. 16 примере, как описано в третьем примерном варианте осуществления, сконфигурировано так, что блок 1100 сложения фазовых ошибок использует значение разности фаз, сформированное на основе принятых символов в прямой последовательности. В качестве альтернативы, как описано во втором примерном варианте осуществления, может быть так, что блок 1100 сложения фазовых ошибок использует значение разности фаз, сформированное на основе принятых символов в обратной последовательности. Кроме того, четвертый примерный вариант осуществления иллюстрирует, что устройство компенсации фазовой ошибки может включать в себя блок 1403 отображения символов QAM, и могут использоваться опорные символы 1403a в прямой последовательности и опорные символы 1403b в обратной последовательности.
В качестве альтернативы, как описано во втором примерном варианте осуществления, фильтр обнаружения фазовой ошибки может формировать внутри оценочные переданные символы для эталона.
[0140]
Переключатель 1602 выбирает одни из введенных принятых символов, фазовая ошибка которых компенсируется, и принятых символов, хранимых в буфере 1601, и вводит выбранные символы в блок восстановления символов QAM.
Имеется два способа выбора. Один из них является способом, в котором принятые символы, хранимые в буфере 1601, выбираются только в первый раз, а во второй раз и после этого выбираются принятые символы, фазовая ошибка которых компенсируется. Другой является способом, в котором всегда выбираются принятые символы, фазовая ошибка которых компенсируется. Разница между двумя способами состоит в том, выбирается ли в первый раз вывод принятых символов, фазовая ошибка которых компенсируется. Вывод принятых символов, фазовая ошибка которых компенсируется, в первый раз служит в качестве символов, фазовая ошибка которых компенсируется без ввода символов для опорной фазы. В частности, разница между двумя способами выбора с помощью переключателя 1602 состоит в том, являются ли выходным сигналом переключателя 1602 принятые символы, хранимые в буфере 1601, либо принятые символы, фаза которых компенсируется устройством 1641 компенсации фазовой ошибки без символов для опорной фазы.
[0141]
Отметим, что в проиллюстрированном на фиг. 16 примере буфер 1601 и переключатель 1602 предоставляются внутри устройства 1641 компенсации фазовой ошибки. В качестве альтернативы буфер 1601 и переключатель 1602 могут предоставляться в устройстве восстановления несущей вне устройства 1641 компенсации фазовой ошибки.
[0142]
В соответствии с настоящим примерным вариантом осуществления можно предотвратить ухудшение частоты появления ошибочных битов, обусловленное компенсацией фазовой ошибки без ввода символов для опорной фазы в первый раз путем выбора, выбирается ли в первый раз вывод принятых символов, фазовая ошибка которых компенсируется.
[0143]
[Шестой примерный вариант осуществления]
Далее описывается устройство компенсации фазовой ошибки в шестом примерном варианте осуществления настоящего изобретения. Устройство компенсации фазовой ошибки в настоящем примерном варианте осуществления отличается от устройств компенсации фазовой ошибки в примерных вариантах осуществления со второго по пятый в том, что выполняется компенсация фазовой ошибки, где контрольный сигнал встраивается в переданный сигнал. Остальная конфигурация и работа в шестом примерном варианте осуществления такие же, как конфигурация и работа в примерных вариантах осуществления со второго по пятый. Поэтому такая же конфигурация и работа в шестом примерном варианте осуществления, как и в примерных вариантах осуществления со второго по пятый, указываются одинаковыми ссылочными позициями, и их подробное описание здесь пропускается.
[0144]
<<Конфигурация устройства демодуляции>>
Фиг. 17 - блок-схема, иллюстрирующая конфигурацию устройства 1700 демодуляции в настоящем примерном варианте осуществления.
Отметим, что в проиллюстрированном на фиг. 17 примере такие же блоки функциональной конфигурации, как на фиг. 2B, указываются одинаковыми ссылочными позициями, и их описание здесь пропускается.
[0145]
Устройство 1700 демодуляции включает в себя устройство 1740 восстановления несущей. Устройство 1740 восстановления несущей снабжается схемой 1741 задержки, интерполирующим фильтром 1742 и блоком 1743 чередования фаз. Тогда в проиллюстрированном на фиг. 17 примере выходной сигнал блока 1743 чередования фаз, который является умножителем, вводится в устройство 241 компенсации фазовой ошибки во втором примерном варианте осуществления в качестве принятых символов. Отметим, что устройство компенсации фазовой ошибки может иметь такую же конфигурацию, как конфигурация в примерных вариантах осуществления с третьего по пятый.
[0146]
Интерполирующий фильтр 1742 используется для оценивания фазовой ошибки между принятыми контрольными символами на основе принятых контрольных символов, ассоциированных с контрольным сигналом. Кроме того, схема 1741 задержки формирует задержку, эквивалентную количеству символов, соответствующих процессу интерполяции в интерполирующем фильтре 1742. Кроме того, блок 1743 чередования фаз компенсирует оценочную фазовую ошибку.
[0147]
Принятые символы, ассоциированные с каждым из оцифрованного сигнала основной полосы Ich и оцифрованного сигнала основной полосы Qch, вводятся в схему 1741 задержки. В этом примере принятые символы также вводятся в интерполирующий фильтр 1742, поскольку принятые символы являются контрольными символами, ассоциированными с общеизвестным контрольным сигналом. Интерполирующий фильтр 1742 на основе множества контрольных символов оценивает фазовую ошибку в принятых символах между контрольными символами с помощью процесса интерполяции. Блок 1743 чередования фаз вращает фазу принятых символов и компенсирует фазовую ошибку в принятых символах на основе информации о фазовой ошибке, выведенной интерполирующим фильтром 1742. Принятые символы после компенсации фазовой ошибки, которые выводятся интерполирующим фильтром 1742, вводятся в устройство компенсации фазовой ошибки в настоящем примерном варианте осуществления.
[0148]
Устройство 1740 восстановления несущей, проиллюстрированное на фиг. 17, может дополнительно снабжаться блоком формирования коэффициента отведения, который формирует данные для использования в процессе для оценивания фазовой ошибки в интерполирующем фильтре 1742 из статистической информации, относящейся к фазовому шуму и тепловому шуму, и передает сформированные данные интерполирующему фильтру 1742.
[0149]
В настоящем примерном варианте осуществления устройством демодуляции применяется настоящее устройство компенсации фазовой ошибки, которое компенсирует фазовую ошибку, где контрольный сигнал встраивается в переданный сигнал. Поэтому можно выполнять передачу данных большого объема и высокого качества с улучшенной частотой появления ошибочных битов даже в неблагоприятном шумовом окружении, преимущественно обусловленном фазовым шумом или тепловым шумом.
[0150]
[Другие варианты осуществления]
В параметре шума, когда fp очень небольшой по сравнению с fs, а γ, выраженный в Уравнении (9), очень небольшой по сравнению с параметром σw2, задаваемым значением дисперсии теплового шума, можно приблизительно выразить K1, K2, K3, K4 и K5, обозначенные Уравнением (11), Уравнением (12) и Уравнением (13), с помощью подходящего вещественного числа λ, близкого к 1, как выражено Уравнением (14).
[0151]
Поэтому на этапе S907, проиллюстрированном на фиг. 9, блок 308 формирования параметров устанавливает коэффициенты K1 - K5 в соответствии с Уравнением (14).
[0152]
[Математическое выражение 14]

[0153]
Настоящее изобретение может применяться к системе, составленной множеством устройств, либо может применяться к одному устройству. Кроме того, настоящее изобретение также может применяться к случаю, в котором программа обработки информации для реализации функций примерных вариантов осуществления поставляется в систему или устройство напрямую или удаленно. Поэтому программа для установки в компьютер, носитель с сохраненной на нем программой и сервер WWW ("Всемирная паутина"), который предписывает компьютеру загрузить программу с целью реализации функций настоящего изобретения с помощью компьютера, также включаются в объем настоящего изобретения. В частности, по меньшей мере постоянный машиночитаемый носитель, на котором хранится программа для предписывания компьютеру исполнять этапы обработки, включенные в вышеупомянутые примерные варианты осуществления, включается в объем настоящего изобретения.
[0154]
[Другое объяснение вариантов осуществления]
Все или часть раскрытых выше примерных вариантов осуществления могут описываться в виде следующих дополнительных примечаний, но не ограничиваться ими.
(Дополнительное примечание 1)
Устройство компенсации фазовой ошибки, содержащее:
первый фильтр обнаружения фазовой ошибки, который формирует первое значение разности фаз и первое значение оценки фазовой ошибки на основе принятых символов в прямой последовательности;
второй фильтр обнаружения фазовой ошибки, который формирует второе значение разности фаз и второе значение оценки фазовой ошибки на основе принятых символов в обратной последовательности;
средство сложения фазовых ошибок, которое формирует третье значение оценки фазовой ошибки на основе первого значения оценки фазовой ошибки и второго значения оценки фазовой ошибки и одного из первого значения разности фаз и второго значения разности фаз; и
средство компенсации фазовой ошибки, которое компенсирует фазовую ошибку в принятых символах в соответствии с третьим значением оценки фазовой ошибки.
(Дополнительное примечание 2)
Устройство компенсации фазовой ошибки в соответствии с Дополнительным примечанием 1, дополнительно содержащее:
средство формирования параметров, которое формирует коэффициент для использования первым фильтром обнаружения фазовой ошибки, вторым фильтром обнаружения фазовой ошибки и средством сложения фазовых ошибок.
(Дополнительное примечание 3)
Устройство компенсации фазовой ошибки в соответствии с Дополнительным примечанием 1 или 2, в котором
первый фильтр обнаружения фазовой ошибки и второй фильтр обнаружения фазовой ошибки включают в себя:
средство определения, которое вычисляет переданные символы, ближайшие к принятым символам, фаза которых компенсируется;
средство обнаружения фазы, которое вычисляет значение разности фаз между вычисленными переданными символами и принятыми символами, фаза которых компенсируется;
одноотводный фильтр, который удаляет высокочастотную составляющую, включенную в выходной сигнал средства обнаружения фазы, с использованием коэффициента отведения, вычисленного на основе параметра фазового шума у опорного генератора и отношения сигнал-шум;
средство суммирования с накоплением, которое вычисляет оценочное значение фазовой ошибки, сформированной в принятых символах, обусловленной фазовым шумом, на основе выходного сигнала одноотводного фильтра с использованием коэффициента обратной связи, вычисленного на основе параметра фазового шума у опорного генератора и отношения сигнал-шум;
средство преобразования данных, которое преобразует оценочное значение фазовой ошибки в данные фазовой компенсации у принятых символов; и
умножитель, который компенсирует фазу принятых символов с помощью выходного сигнала средства преобразования данных.
(Дополнительное примечание 4)
Устройство компенсации фазовой ошибки в соответствии с Дополнительным примечанием 3, в котором
средство суммирования с накоплением во втором фильтре обнаружения фазовой ошибки дополнительно использует начальный коэффициент для задания начального значения.
(Дополнительное примечание 5)
Устройство компенсации фазовой ошибки в соответствии с Дополнительным примечанием 3 или 4, в котором
средство обнаружения фазы в первом фильтре обнаружения фазовой ошибки и во втором фильтре обнаружения фазовой ошибки вычисляет значение разности фаз между одними из символов, выбранных из переданных символов, и символов для опорной фазы; и принятыми символами, фаза которых компенсируется, причем символы для опорной фазы получаются путем обратного преобразования демодулированных данных, демодулированные данные преобразуются на основе принятых символов, фазовая ошибка которых компенсируется.
(Дополнительное примечание 6)
Устройство компенсации фазовой ошибки в соответствии с любым из Дополнительных примечаний 1-5, в котором
средство сложения фазовых ошибок включает в себя:
первый сумматор, который складывает первое значение оценки фазовой ошибки и второе значение оценки фазовой ошибки;
второй умножитель, который умножает первый коэффициент умножения, вычисленный из параметра фазового шума у опорного генератора и из отношения сигнал-шум, на результат сложения из сумматора;
третий умножитель, который умножает второй коэффициент умножения, вычисленный из параметра фазового шума у опорного генератора и из отношения сигнал-шум, на одно из первого значения разности фаз и второго значения разности фаз; и
второй сумматор, который задает результат сложения результата умножения из второго умножителя и результата умножения из третьего умножителя в качестве третьего значения оценки фазовой ошибки, сформированной в фазе принятых символов, обусловленной фазовым шумом.
(Дополнительное примечание 7)
Устройство восстановления несущей, содержащее:
устройство компенсации фазовой ошибки по любому из Дополнительных примечаний 1-5;
средство восстановления символов, которое восстанавливает принятые символы, фазовая ошибка которых компенсируется устройством компенсации фазовой ошибки; и
средство декодирования с исправлением ошибок, которое исправляет ошибку, включенную в принятые символы, фазовая ошибка которых компенсируется на основе выходного сигнала средства восстановления символов, и выводит демодулированные данные.
(Дополнительное примечание 8)
Устройство демодуляции, содержащее:
устройство восстановления несущей по Дополнительному примечанию 7; опорный генератор, который выводит опорный сигнал фиксированной частоты;
детектор, который ортогонально детектирует входной сигнал промежуточной частоты и формирует сигнал основной полосы Ich и сигнал основной полосы Qch; и
аналого-цифровой преобразователь, который преобразует сформированный сигнал основной полосы в цифровой сигнал и вводит цифровой сигнал в устройство восстановления несущей в качестве принятых символов.
(Дополнительное примечание 9)
Устройство связи, содержащее:
по меньшей мере устройство демодуляции по Дополнительному примечанию 8;
схему приема, которая выбирает радиоволну с предварительно определенной полосой частот из радиоволн, принимаемых антенной, чтобы преобразовать выбранную радиоволну в сигнал промежуточной частоты, и вводит преобразованный сигнал в устройство демодуляции; и
средство декодирования принятых данных, которое декодирует демодулированные данные, введенные устройством демодуляции, и формирует принятые данные.
(Дополнительное примечание 10)
Способ компенсации фазовой ошибки, содержащий:
формирование последовательности значений φ(1), φ(2), …, φ(M) разности фаз (где M - положительное целое число) между последовательностью принятых символов и последовательностью опорных символов;
последовательное вычисление первых значений θ+(1), θ+(2), …, θ+(M), θ+(M+1) оценки фазовой ошибки, обусловленных фазовым шумом, включенным в последовательность значений разности фаз, на основе последовательности значений разности фаз;
последовательное вычисление вторых значений θ-(M), θ-(M-1), …, θ-(1) оценки фазовой ошибки на основе последовательности значений φ(M), φ(M-1), …, φ(1) разности фаз путем установки θ+(M+1) в качестве начального значения;
вычисление третьих значений θ±(1), θ±(2), …, θ±(M) оценки фазовой ошибки путем линейного вычисления первых значений θ+(1), θ+(2), …, θ+(M) оценки фазовой ошибки, вторых значений θ-(1), θ-(2), …, θ-(M) оценки фазовой ошибки и значений φ(1), φ(2), …, φ(M) разности фаз;
последовательное вычисление первых значений оценки фазовой ошибки, вторых значений оценки фазовой ошибки и третьих значений оценки фазовой ошибки, включенных в значения φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз касательно положительного целого k, с помощью процессов вычисления; и
компенсацию фазовой ошибки путем вычитания третьих значений θ±(kM+1), θ±(kM+2), …, θ±((k+1)M) оценки фазовой ошибки из значений φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз.
(Дополнительное примечание 11)
Запоминающий носитель с сохраненной на нем программой компенсации фазовой ошибки, которая предписывает компьютеру исполнять процессы:
формирования последовательности значений φ(1), φ(2), …, φ(M) разности фаз (где M - положительное целое число) между последовательностью принятых символов и последовательностью опорных символов;
последовательного вычисления первых значений θ+(1), θ+(2), …, θ+(M), θ+(M+1) оценки фазовой ошибки, обусловленных фазовым шумом, включенным в последовательность значений разности фаз, на основе последовательности значений разности фаз;
последовательного вычисления вторых значений θ-(M), θ-(M-1), …, θ-(1) оценки фазовой ошибки на основе последовательности значений φ(M), φ(M-1), …, φ(1) разности фаз путем установки θ+(M+1) в качестве начального значения;
вычисления третьих значений θ±(1), θ±(2), …, θ±(M) оценки фазовой ошибки путем линейного вычисления первых значений θ+(1), θ+(2), …, θ+(M) оценки фазовой ошибки, вторых значений θ-(1), θ-(2), …, θ-(M) оценки фазовой ошибки и значений φ(1), φ(2), …, φ(M) разности фаз;
последовательного вычисления первых значений оценки фазовой ошибки, вторых значений оценки фазовой ошибки и третьих значений оценки фазовой ошибки, включенных в значения φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз касательно положительного целого k, с помощью процессов вычисления; и
компенсации фазовой ошибки путем вычитания третьих значений θ±(kM+1), θ±(kM+2), …, θ±((k+1)M) оценки фазовой ошибки из значений φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз.
[0155]
Хотя изобретение детально показано и описано со ссылкой на примерные варианты осуществления, изобретение не ограничивается этими вариантами осуществления. Средние специалисты в данной области техники поймут, что в нем могут быть сделаны различные изменения в форме и деталях без отклонения от сущности и объема настоящего изобретения, которые заданы формулой изобретения. Кроме того, система или устройство, полученные путем объединения каким-либо образом отдельных признаков, включенных в каждый из примерных вариантов осуществления, также могут включаться в объем настоящего изобретения. В качестве практического примера настоящего изобретения подходят обычные устройства цифровой беспроводной связи, включающие в себя мобильное оконечное устройство и магистральное беспроводное устройство.
[0156]
Данная заявка основывается и притязает на преимущество приоритета по заявке на патент Японии № 2014-006180, поданной 16 января 2014 г., раскрытие которой полностью включается в этот документ посредством ссылки.
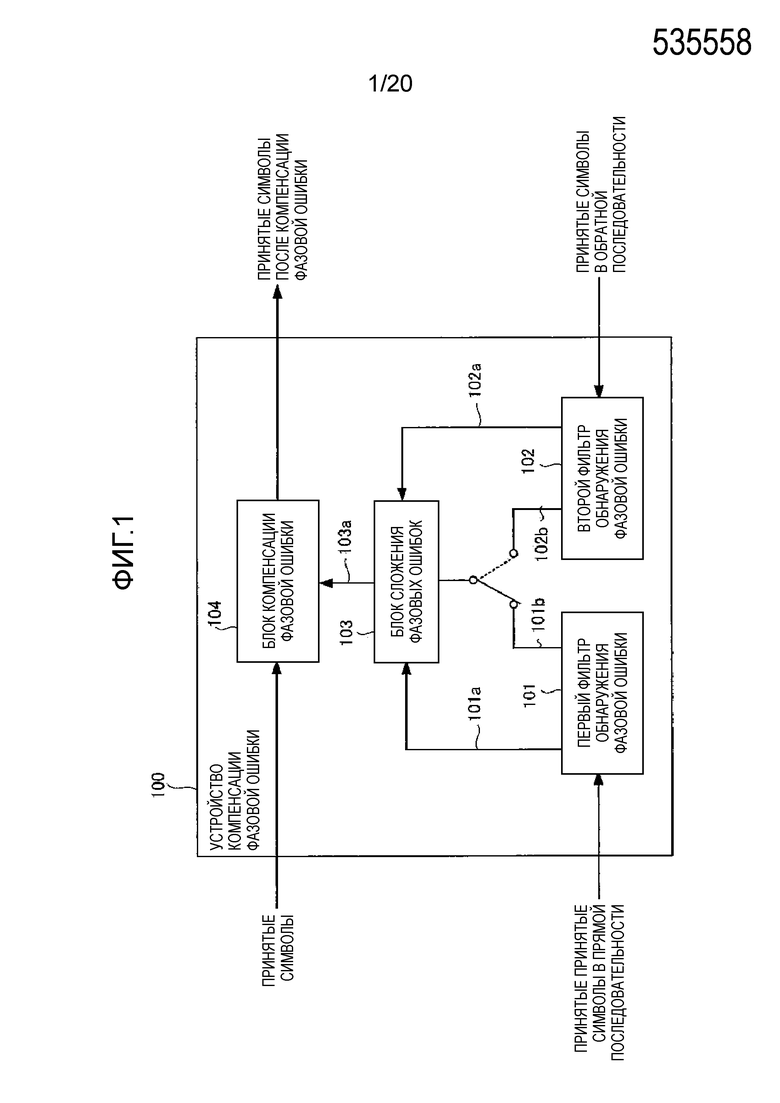
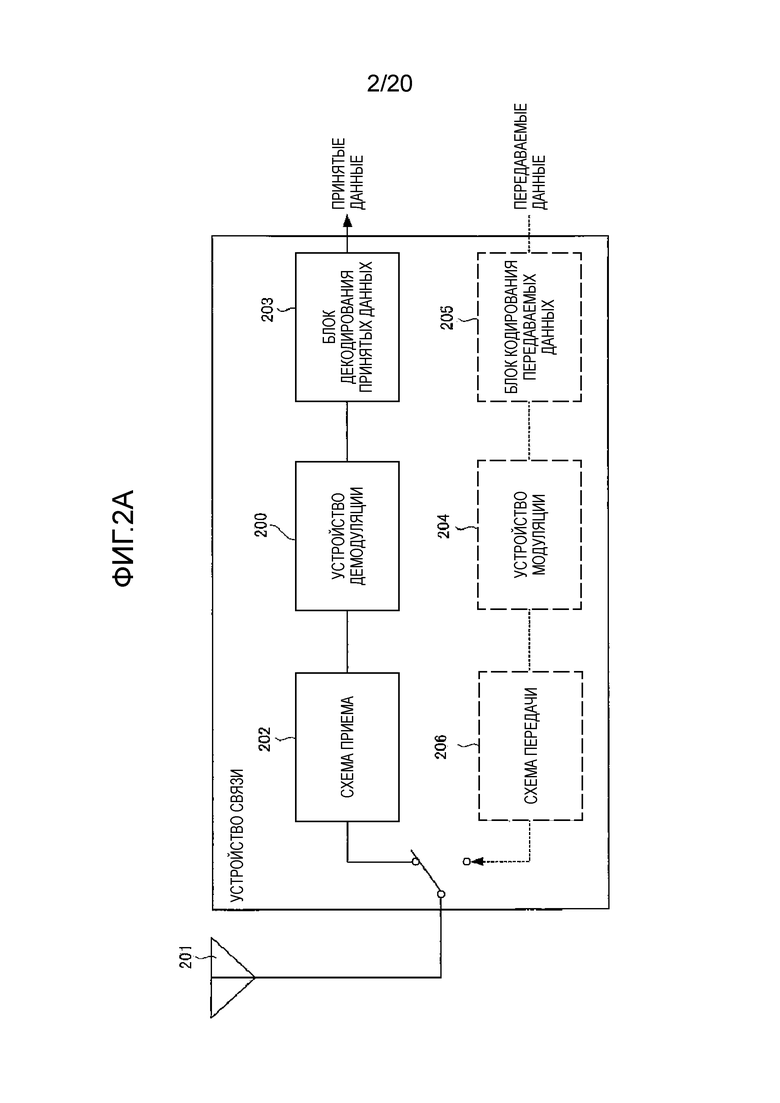
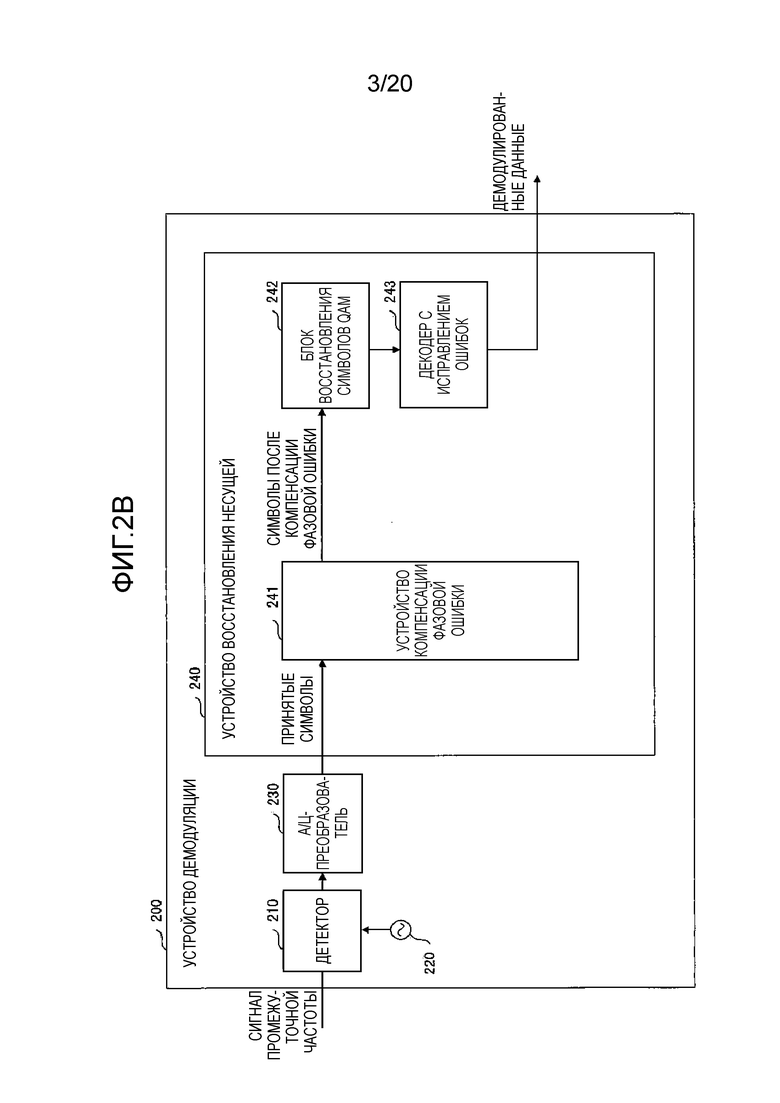
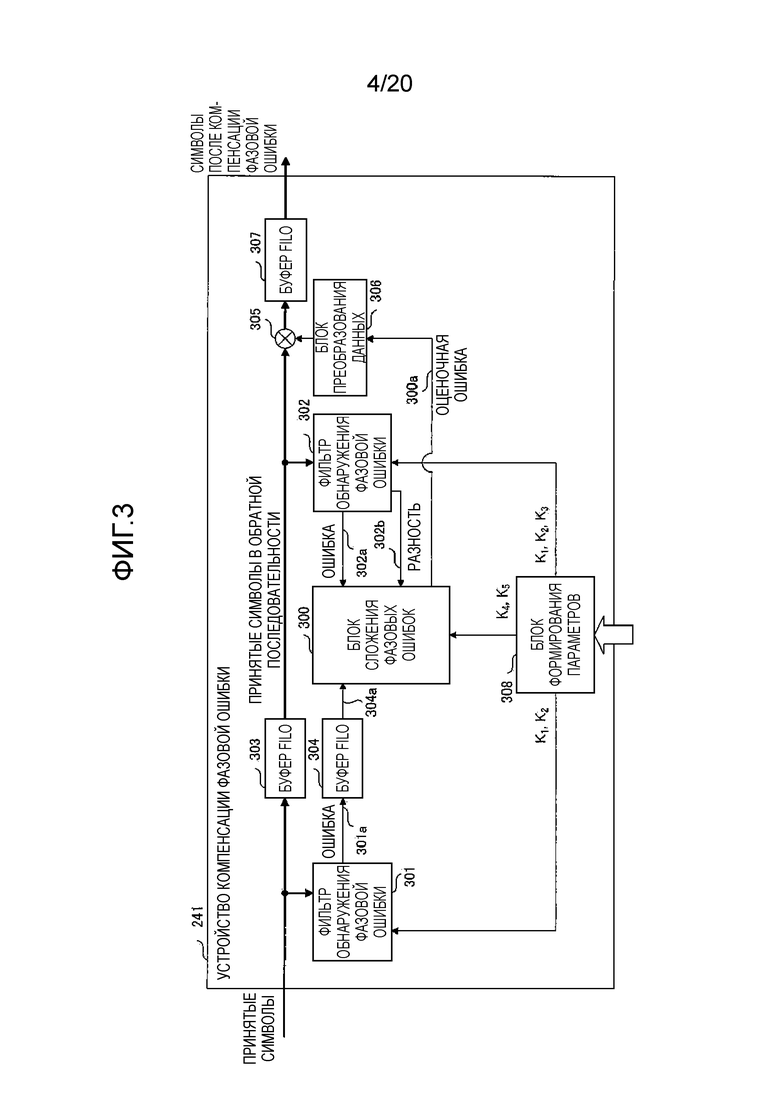
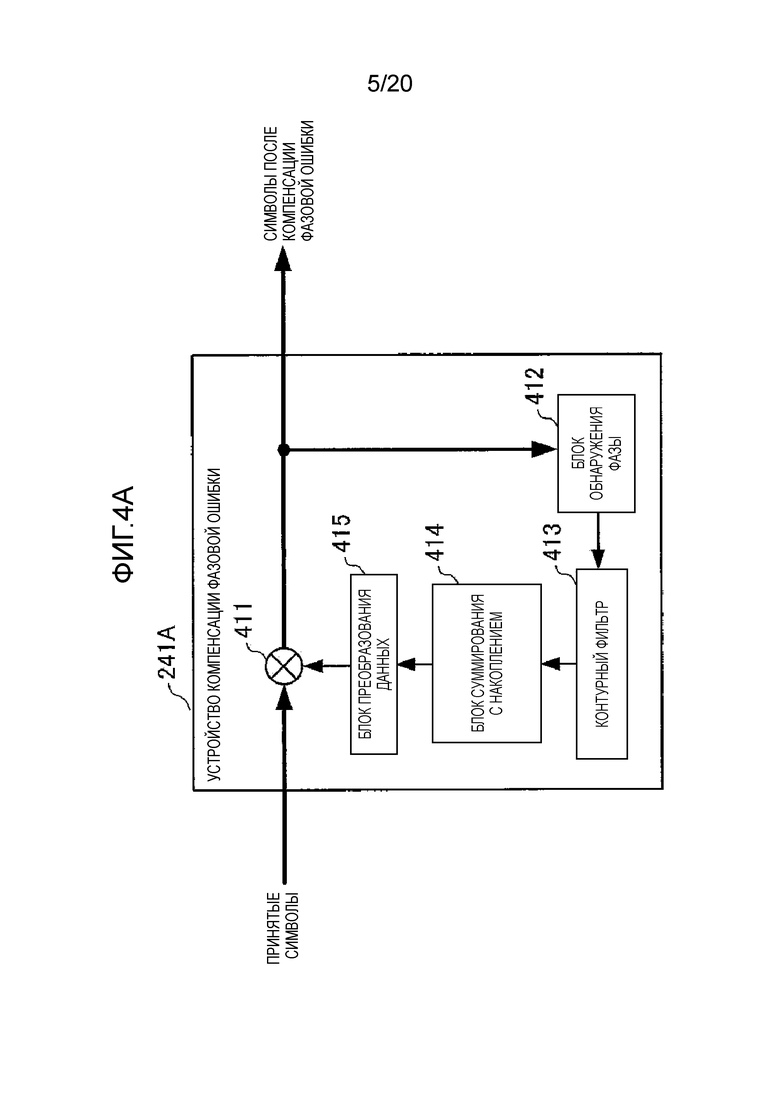
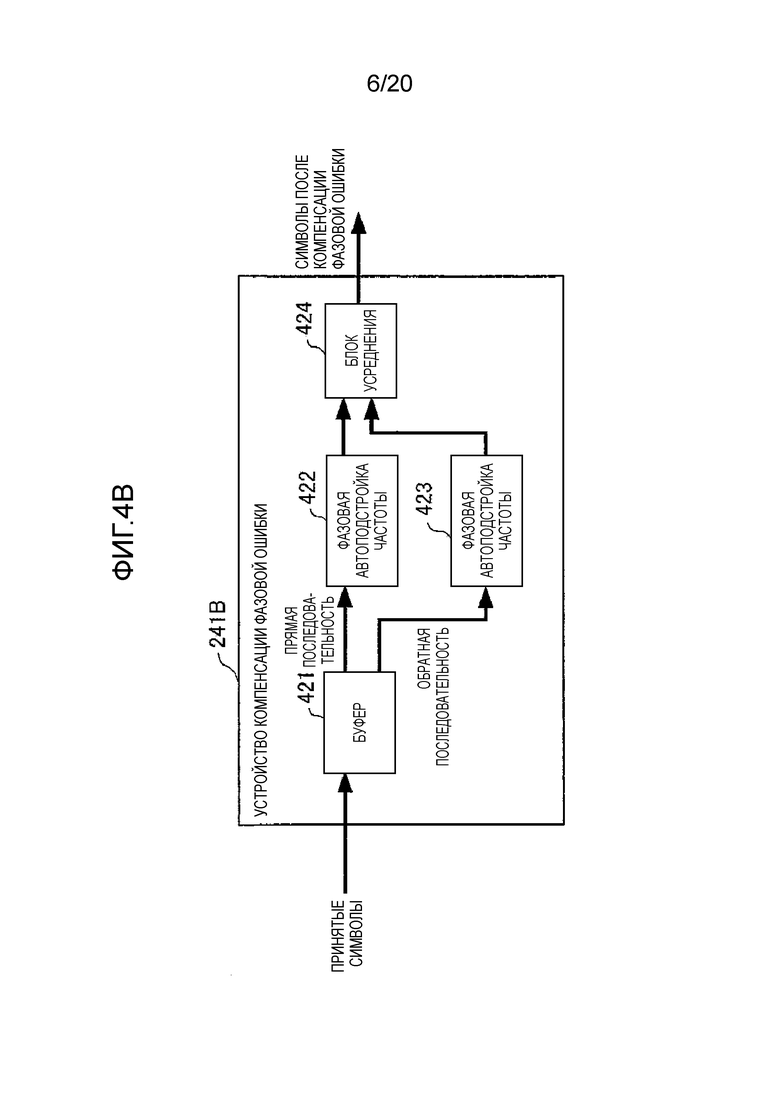
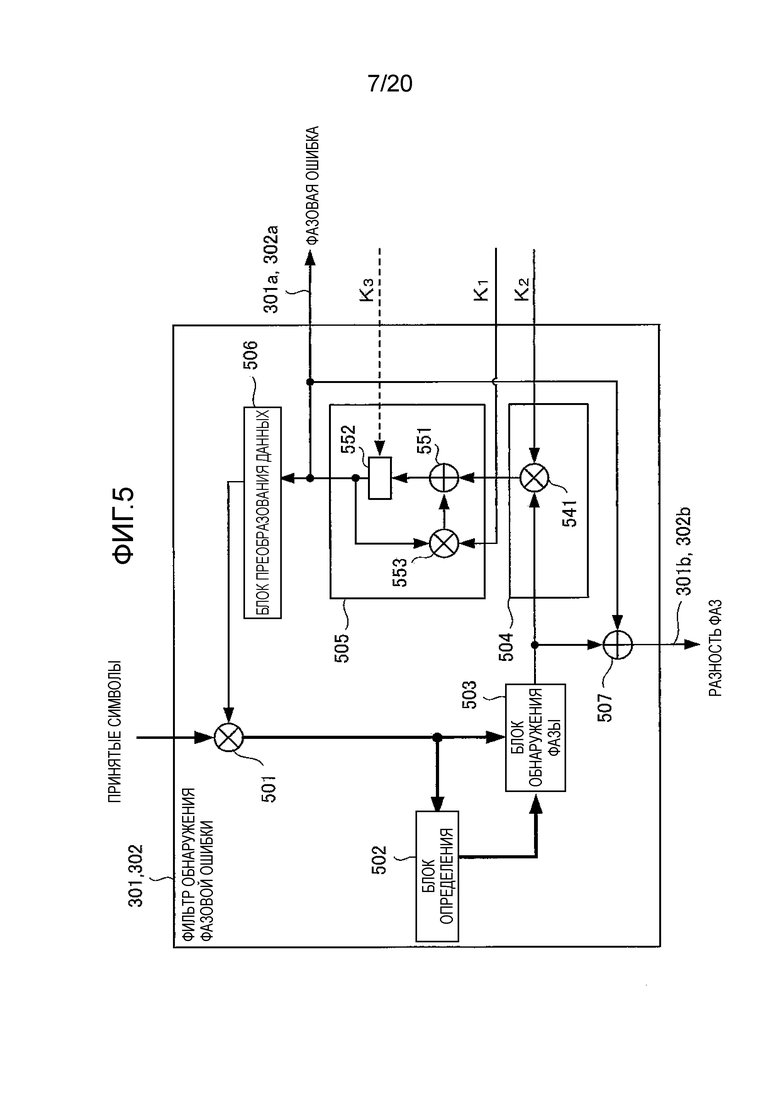
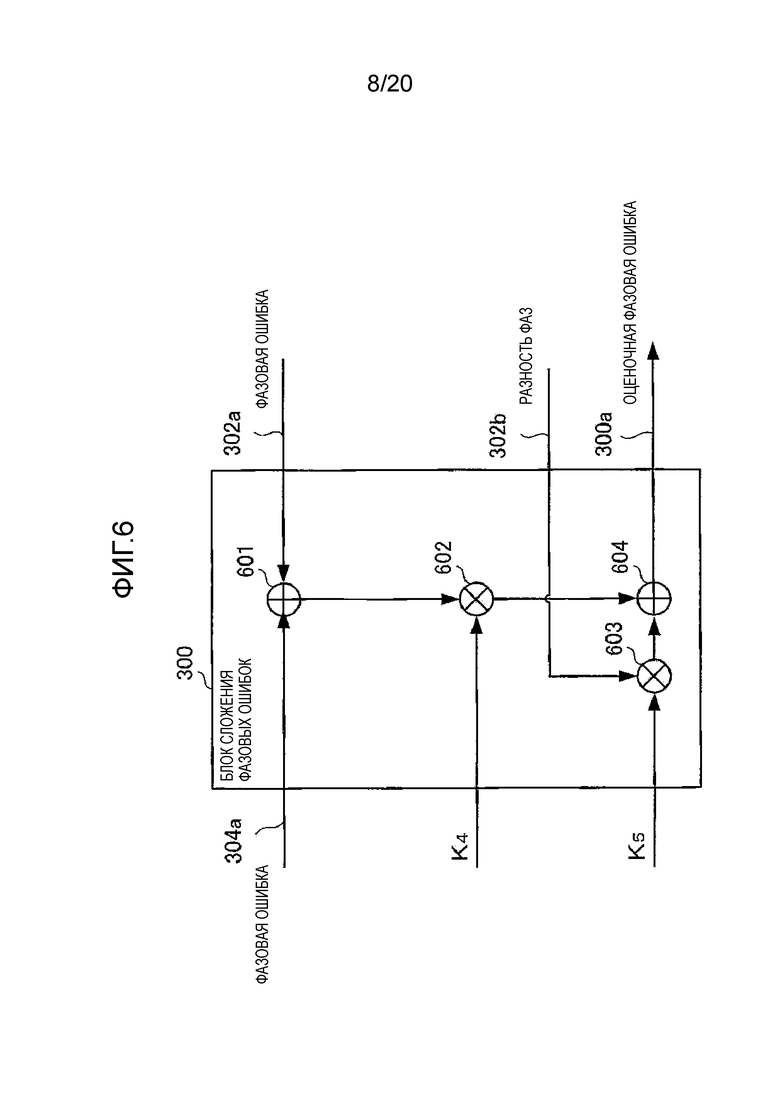
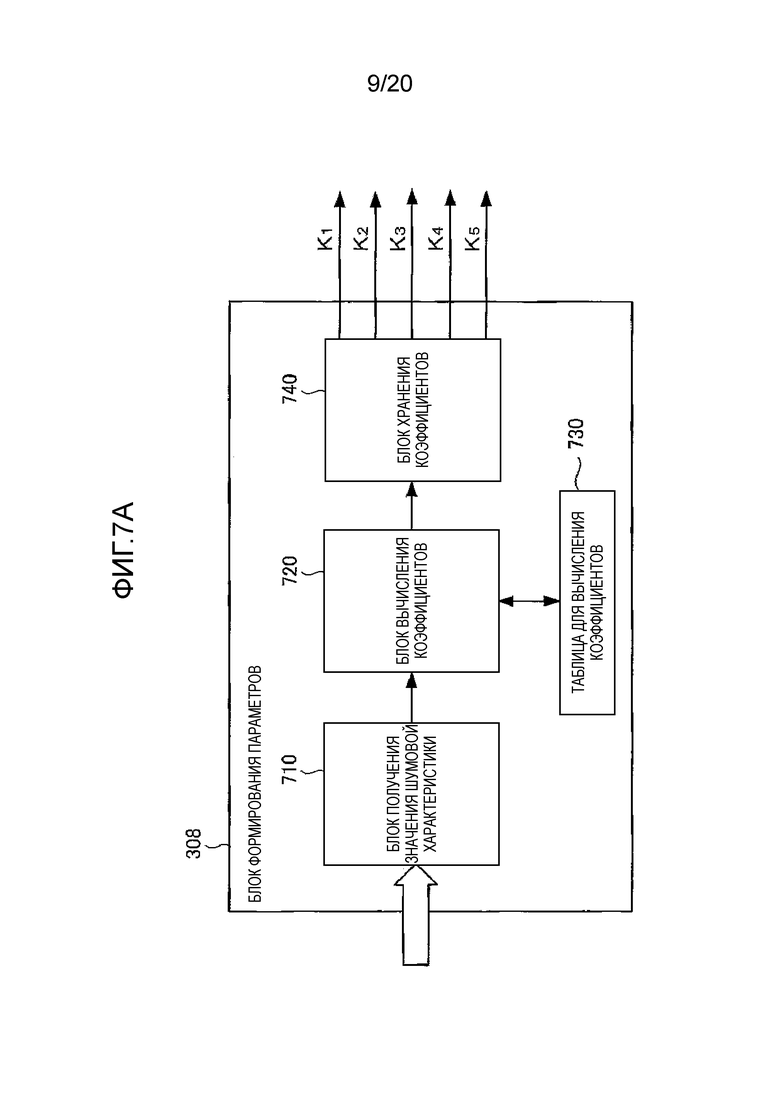
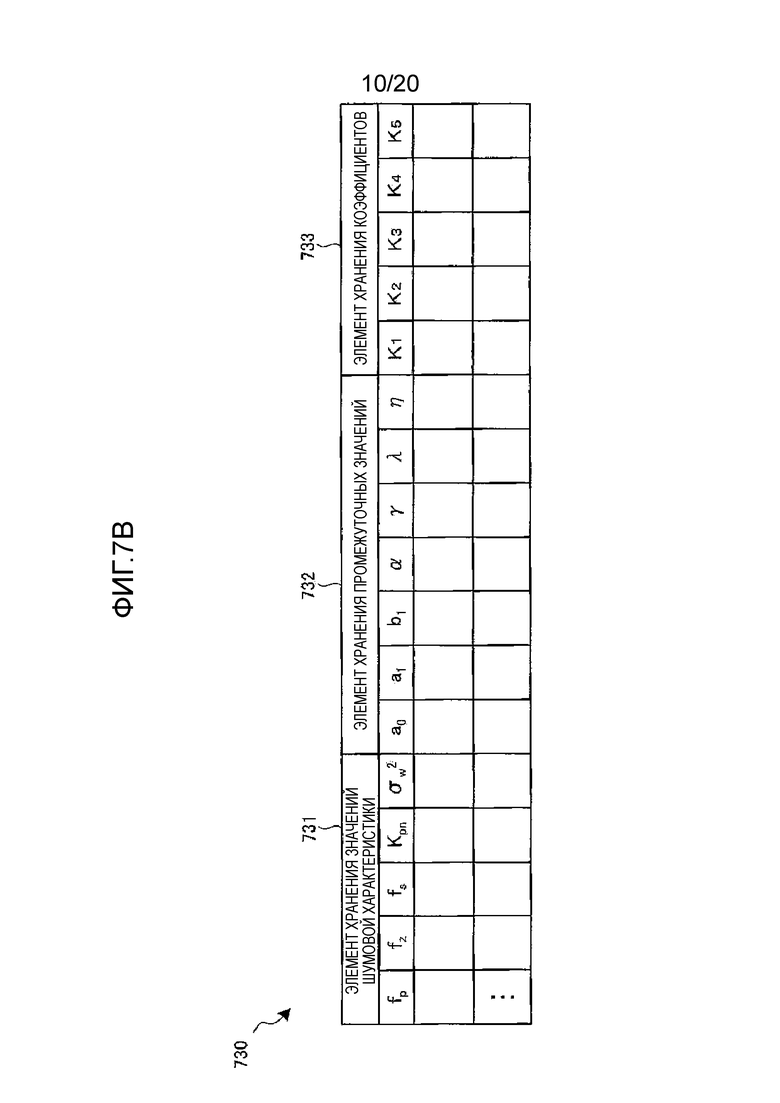
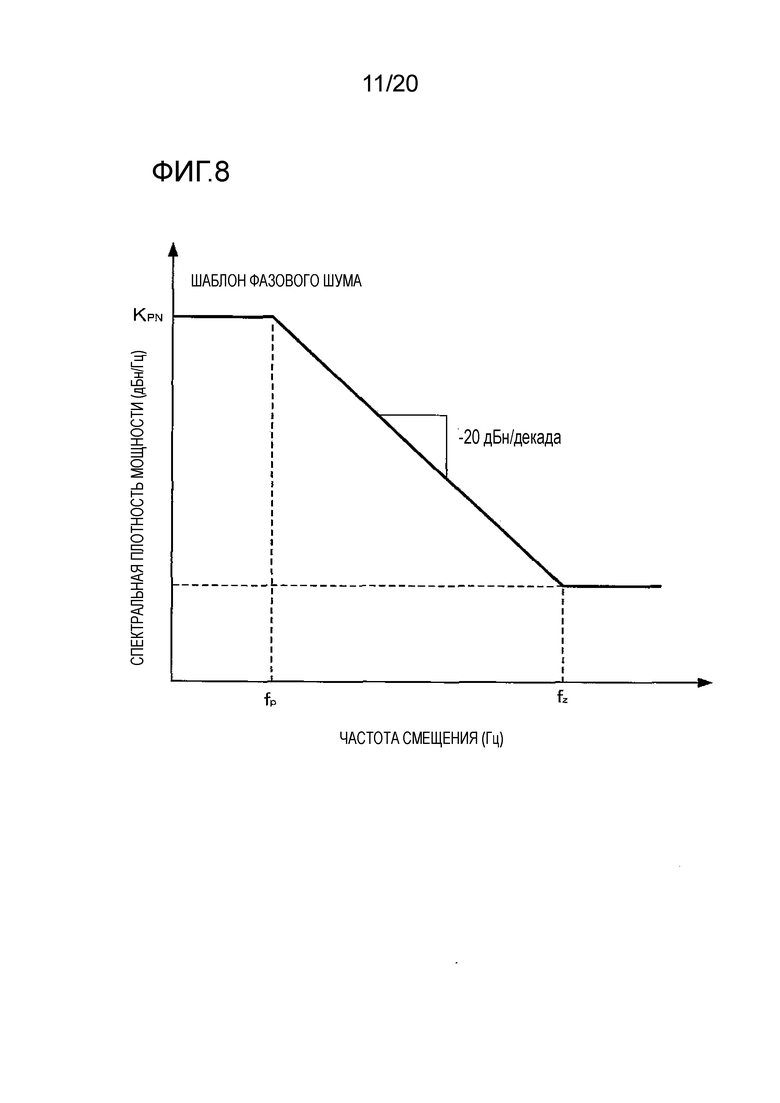
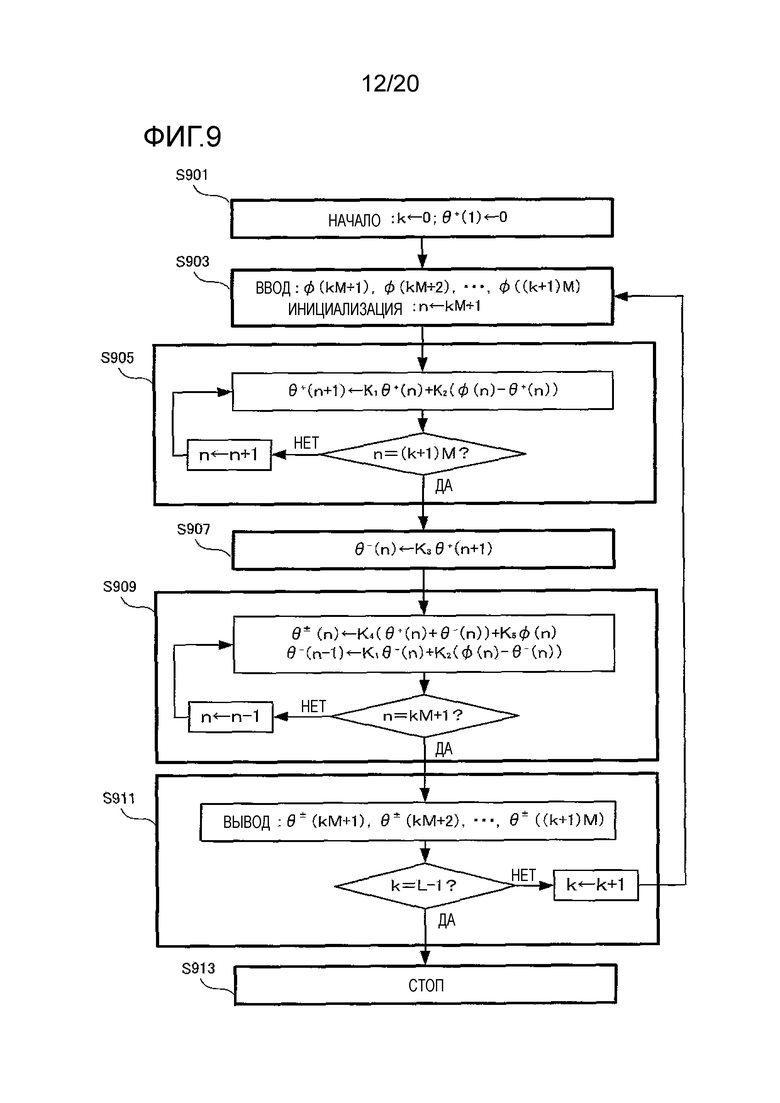
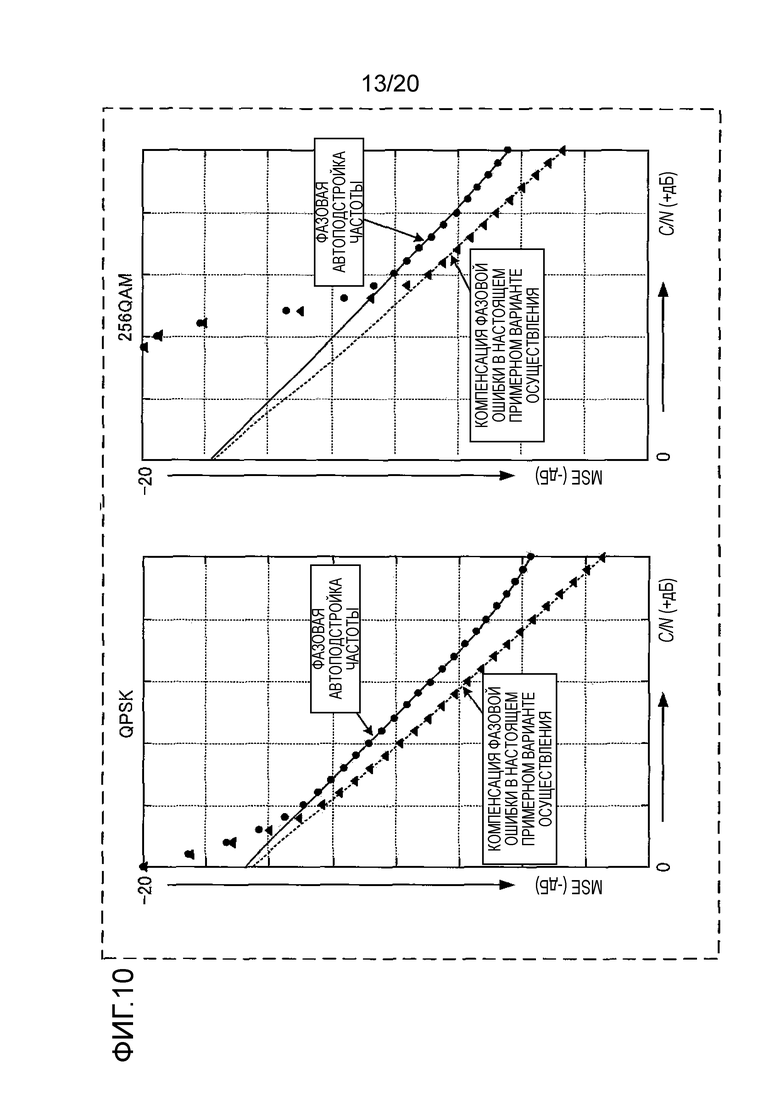
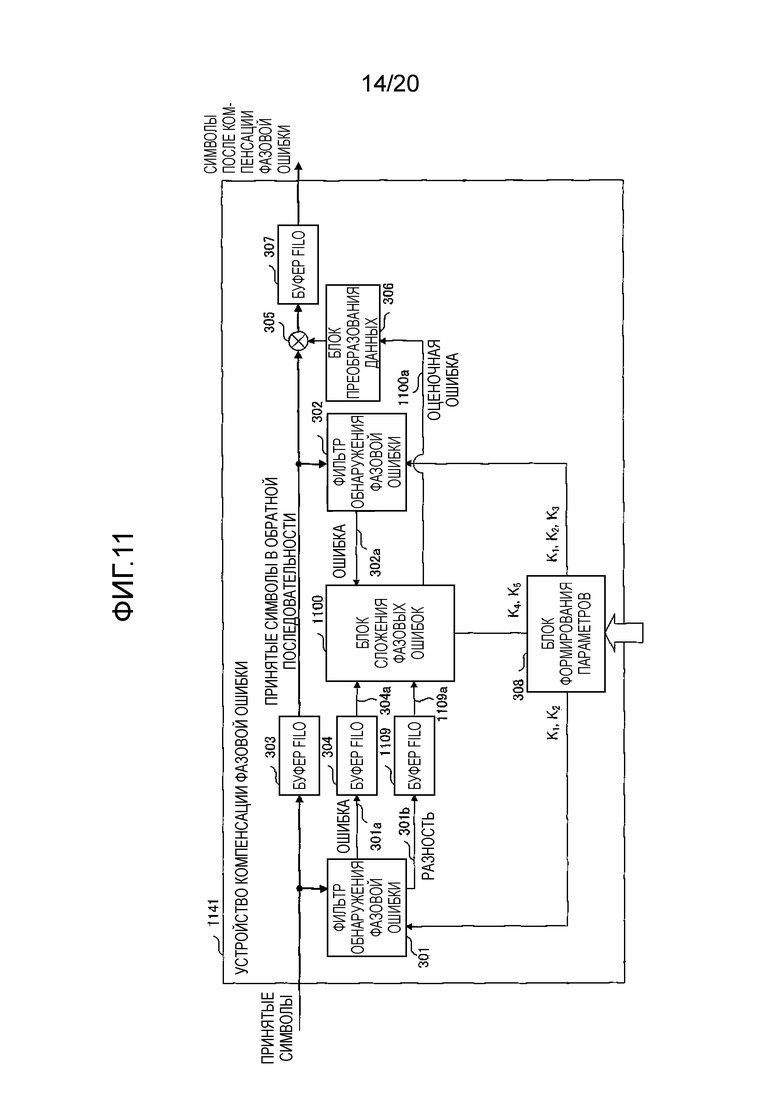
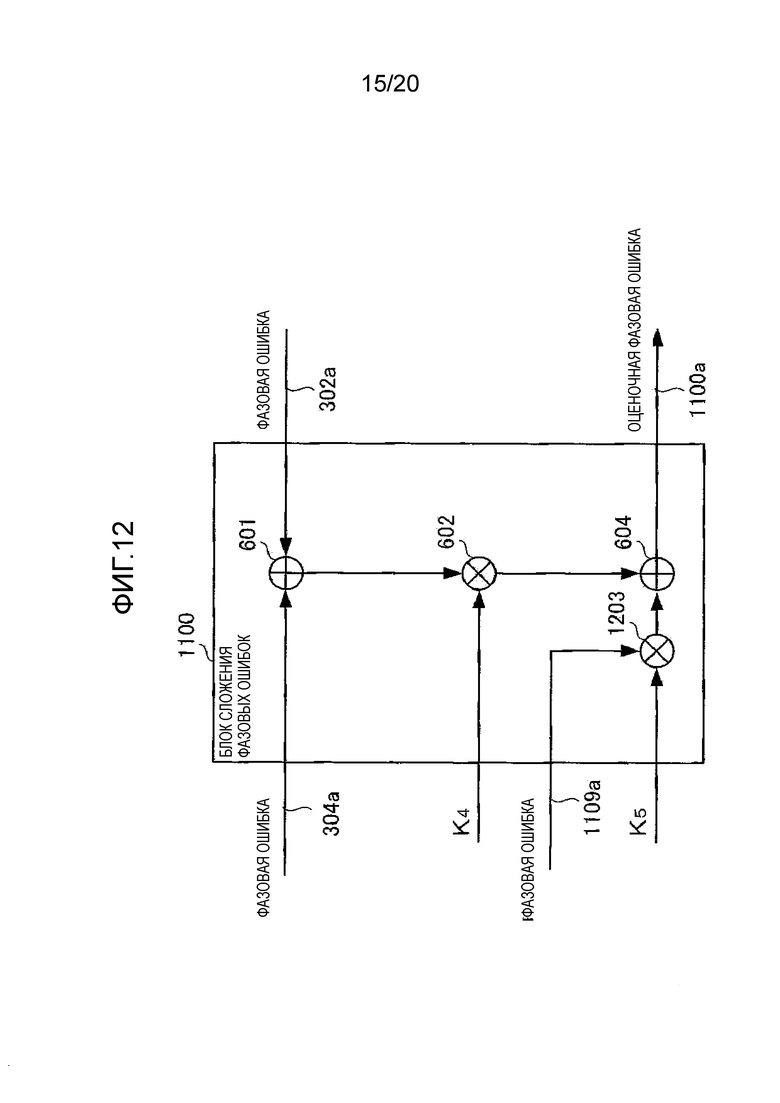
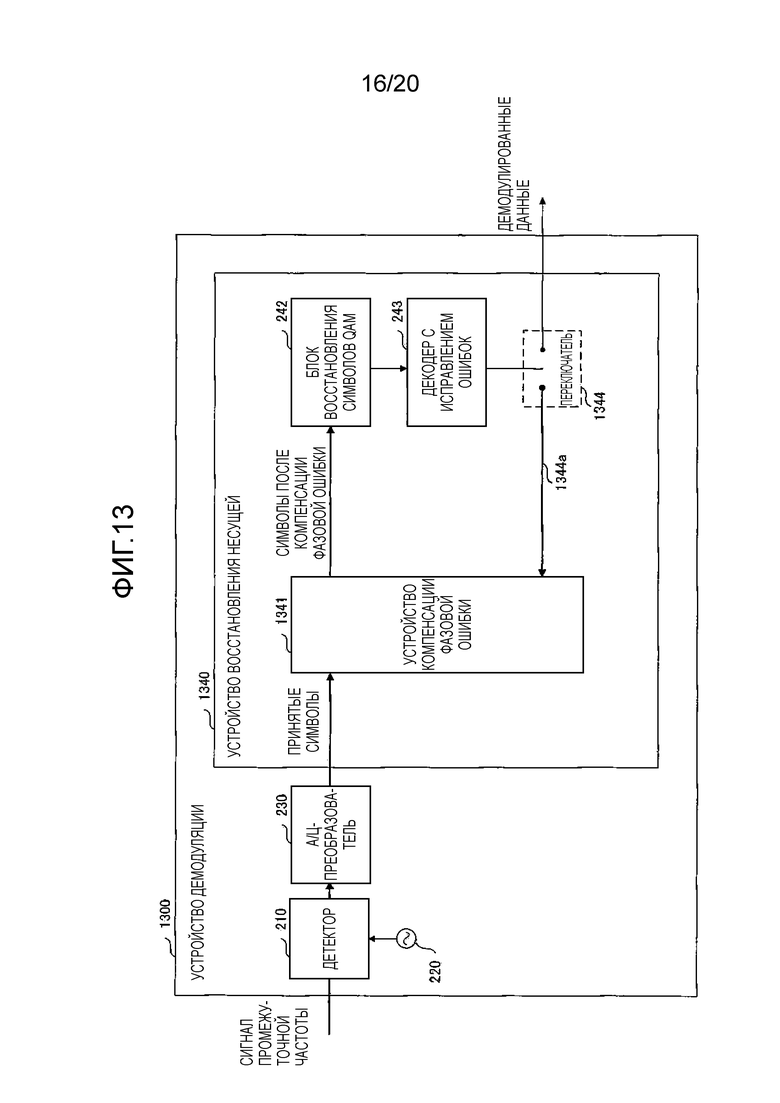
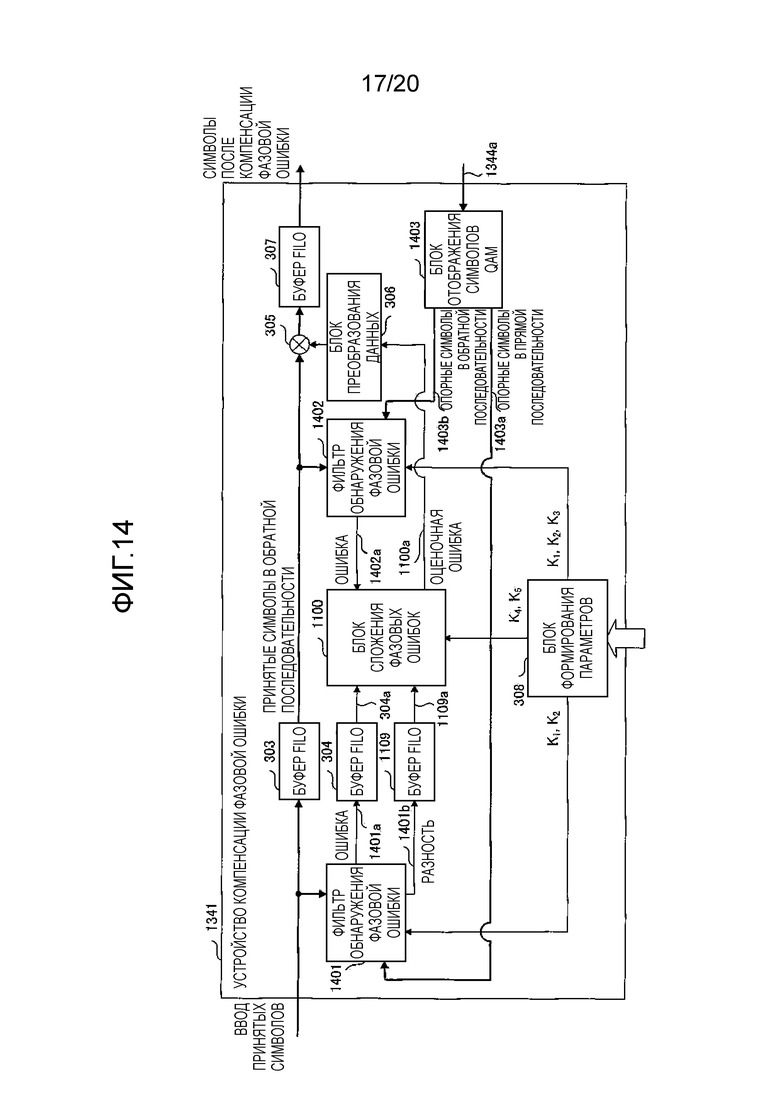
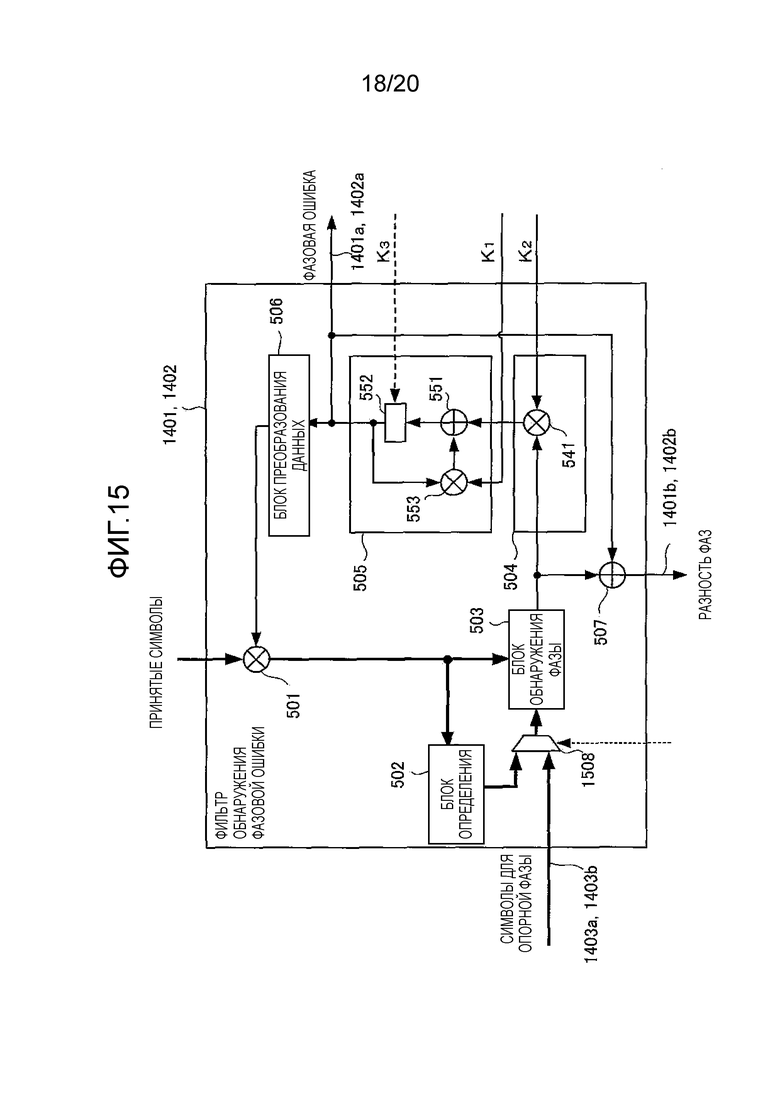
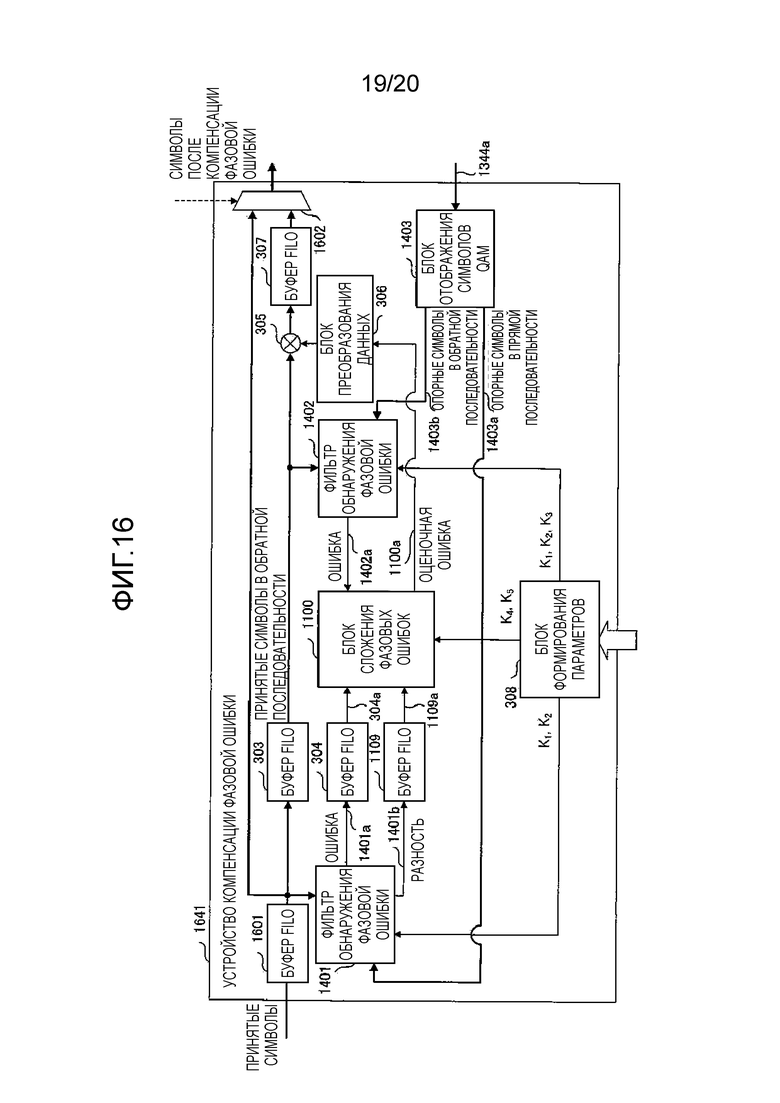
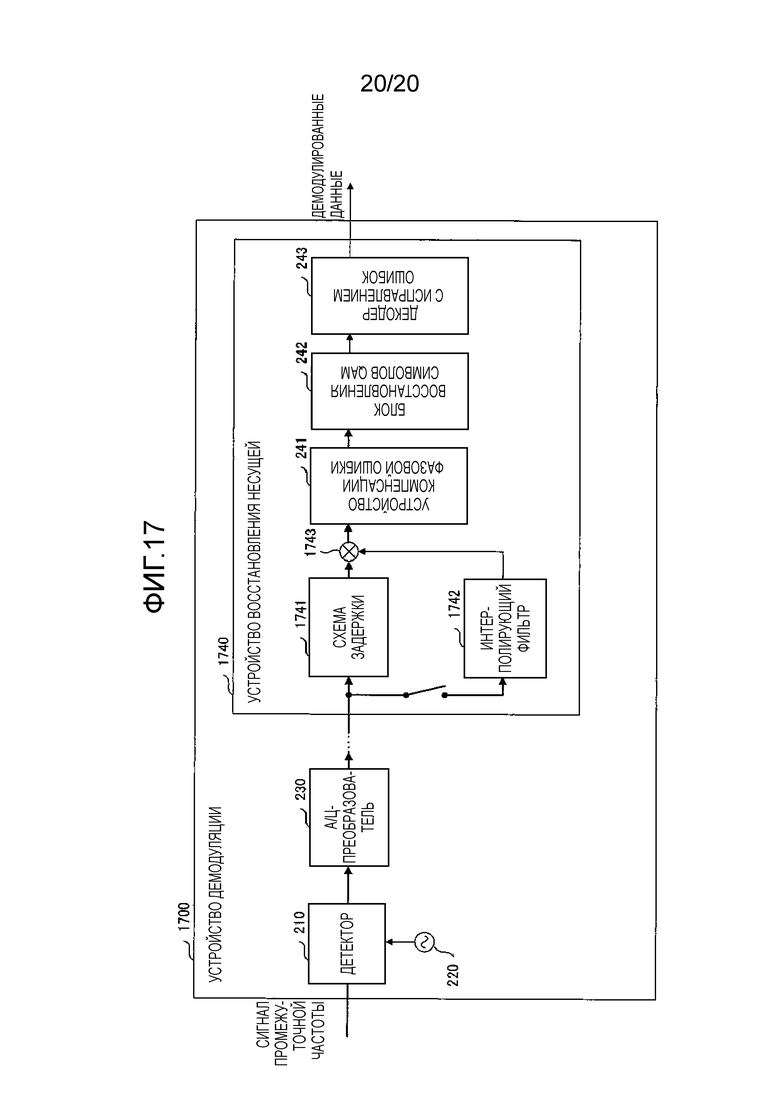
Изобретение относится к системам связи и может быть использовано как устройство компенсации фазовой ошибки устройства восстановления несущей для демодулятора, используемого в системах связи с квадратурной амплитудной модуляцией. Технический результат – увеличение пропускной способности и повышение качества передачи данных путем уменьшения частоты появления ошибочных битов в неблагоприятном шумовом окружении, преимущественно обусловленном фазовыми шумами или тепловыми шумами. Устройство компенсации фазовой ошибки содержит первый и второй фильтры, которые формируют значения разности фаз и значение оценки фазовой ошибки соответственно в прямой и обратной последовательностях принятых символов, средство сложения фазовых ошибок, которое формирует значение оценки фазовой ошибки на основе значений оценки фазовых ошибок и одного из значений разности фаз и средство компенсации фазовой ошибки в принятых символах на основе оценки фазовой ошибки, полученной в средстве сложения. 6 н. и 4 з.п. ф-лы, 20 ил. 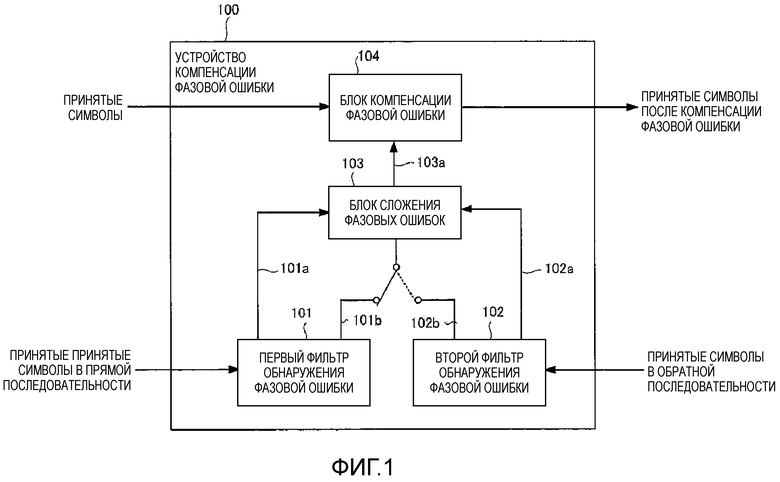
1. Устройство компенсации фазовой ошибки, содержащее:
первый фильтр обнаружения фазовой ошибки, который формирует первое значение разности фаз и первое значение оценки фазовой ошибки на основе принятых символов в прямой последовательности;
второй фильтр обнаружения фазовой ошибки, который формирует второе значение разности фаз и второе значение оценки фазовой ошибки на основе принятых символов в обратной последовательности;
средство сложения фазовых ошибок, которое формирует третье значение оценки фазовой ошибки на основе первого значения оценки фазовой ошибки и второго значения оценки фазовой ошибки и одного из первого значения разности фаз и второго значения разности фаз; и
средство компенсации фазовой ошибки, которое компенсирует фазовую ошибку в принятых символах в соответствии с третьим значением оценки фазовой ошибки.
2. Устройство компенсации фазовой ошибки по п. 1, дополнительно содержащее:
средство формирования параметров, которое формирует коэффициент, подлежащий использованию первым фильтром обнаружения фазовой ошибки, вторым фильтром обнаружения фазовой ошибки и средством сложения фазовых ошибок.
3. Устройство компенсации фазовой ошибки по п. 1 или 2, в котором
первый фильтр обнаружения фазовой ошибки и второй фильтр обнаружения фазовой ошибки включают в себя:
средство определения, которое вычисляет переданные символы, ближайшие к принятым символам, фаза которых компенсируется;
средство обнаружения фазы, которое вычисляет значение разности фаз между вычисленными переданными символами и принятыми символами, фаза которых компенсируется;
одноотводный фильтр, который удаляет высокочастотную составляющую, включенную в выходной сигнал средства обнаружения фазы, с использованием коэффициента отведения, вычисленного на основе параметра фазового шума у опорного генератора и отношения сигнал-шум;
средство суммирования с накоплением, которое вычисляет оценочное значение фазовой ошибки, сформированной в принятых символах, обусловленной фазовым шумом, на основе выходного сигнала одноотводного фильтра с использованием коэффициента обратной связи, вычисленного на основе параметра фазового шума у опорного генератора и отношения сигнал-шум;
средство преобразования данных, которое преобразует оценочное значение фазовой ошибки в данные фазовой компенсации у принятых символов; и
умножитель, который компенсирует фазу принятых символов с помощью выходного сигнала средства преобразования данных.
4. Устройство компенсации фазовой ошибки по п. 3, в котором
средство обнаружения фазы в первом фильтре обнаружения фазовой ошибки и во втором фильтре обнаружения фазовой ошибки вычисляет значение разности фаз между одним из символов, выбранных из переданных символов, и символов для опорной фазы; и принятыми символами, фаза которых компенсируется, причем символы для опорной фазы получаются путем обратного преобразования демодулированных данных, причем демодулированные данные преобразуются на основе принятых символов, фазовая ошибка которых компенсируется.
5. Устройство компенсации фазовой ошибки по любому из пп. 1, 2 или 4, в котором
средство сложения фазовых ошибок включает в себя:
первый сумматор, который складывает первое значение оценки фазовой ошибки и второе значение оценки фазовой ошибки;
второй умножитель, который умножает первый коэффициент умножения, вычисленный из параметра фазового шума у опорного генератора и из отношения сигнал-шум, на результат сложения из сумматора;
третий умножитель, который умножает второй коэффициент умножения, вычисленный из параметра фазового шума у опорного генератора и из отношения сигнал-шум, на одно из первого значения разности фаз и второго значения разности фаз; и
второй сумматор, который задает результат сложения результата умножения из второго умножителя и результата умножения из третьего умножителя в качестве третьего значения оценки фазовой ошибки, сформированной в фазе принятых символов, обусловленной фазовым шумом.
6. Устройство восстановления несущей, содержащее:
устройство компенсации фазовой ошибки по любому из пп. 1, 2 или 4;
средство восстановления символов, которое восстанавливает принятые символы, фазовая ошибка которых компенсируется устройством компенсации фазовой ошибки; и
средство декодирования с исправлением ошибок, которое исправляет ошибку, включенную в принятые символы, фазовая ошибка которых компенсируется на основе выходного сигнала средства восстановления символов, и выводит демодулированные данные.
7. Устройство демодуляции, содержащее:
устройство восстановления несущей по п. 6;
опорный генератор, который выводит опорный сигнал фиксированной частоты;
детектор, который ортогонально детектирует входной сигнал промежуточной частоты и формирует сигнал основной полосы Ich и сигнал основной полосы Qch; и
аналого-цифровой преобразователь, который преобразует сформированный сигнал основной полосы в цифровой сигнал и вводит цифровой сигнал в устройство восстановления несущей в качестве принятых символов.
8. Устройство связи, содержащее:
по меньшей мере устройство демодуляции по п. 7;
схему приема, которая выбирает радиоволну с предварительно определенной полосой частот из радиоволн, принимаемых антенной, чтобы преобразовать выбранную радиоволну в сигнал промежуточной частоты, и вводит преобразованный сигнал в устройство демодуляции; и
средство декодирования принятых данных, которое декодирует демодулированные данные, введенные устройством демодуляции, и формирует принятые данные.
9. Способ компенсации фазовой ошибки, содержащий этапы, на которых:
формируют последовательность значений φ(1), φ(2), …, φ(M) разности фаз (где M - положительное целое число) между последовательностью принятых символов и последовательностью опорных символов;
последовательно вычисляют первые значения θ+(1), θ+(2), …, θ+(M), θ+(M+1) оценки фазовой ошибки, обусловленные фазовым шумом, включенным в последовательность значений разности фаз, на основе последовательности значений разности фаз;
последовательно вычисляют вторые значения θ-(M), θ-(M-1), …, θ-(1) оценки фазовой ошибки на основе последовательности значений φ(M), φ(M-1), …, φ(1) разности фаз путем установки θ+(M+1) в качестве начального значения;
вычисляют третьи значения θ±(1), θ±(2), …, θ±(M) оценки фазовой ошибки путем линейного вычисления первых значений θ+(1), θ+(2), …, θ+(M) оценки фазовой ошибки, вторых значений θ-(1), θ-(2), …, θ-(M) оценки фазовой ошибки и значений φ(1), φ(2), …, φ(M) разности фаз;
последовательно вычисляют первые значения оценки фазовой ошибки, вторые значения оценки фазовой ошибки и третьи значения оценки фазовой ошибки, включенные в значения φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз касательно положительного целого k, с помощью процессов вычисления; и
компенсируют фазовую ошибку путем вычитания третьих значений θ±(kM+1), θ±(kM+2), …, θ±((k+1)M) оценки фазовой ошибки из значений φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз.
10. Запоминающий носитель с сохраненной на нем программой компенсации фазовой ошибки, которая предписывает компьютеру исполнять процессы:
формирования последовательности значений φ(1), φ(2), …, φ(M) разности фаз (где M - положительное целое число) между последовательностью принятых символов и последовательностью опорных символов;
последовательного вычисления первых значений θ+(1), θ+(2), …, θ+(M), θ+(M+1) оценки фазовой ошибки, обусловленных фазовым шумом, включенным в последовательность значений разности фаз, на основе последовательности значений разности фаз;
последовательного вычисления вторых значений θ-(M), θ-(M-1), …, θ-(1) оценки фазовой ошибки на основе последовательности значений φ(M), φ(M-1), …, φ(1) разности фаз путем установки θ+(M+1) в качестве начального значения;
вычисления третьих значений θ±(1), θ±(2), …, θ±(M) оценки фазовой ошибки путем линейного вычисления первых значений θ+(1), θ+(2), …, θ+(M) оценки фазовой ошибки, вторых значений θ-(1), θ-(2), …, θ-(M) оценки фазовой ошибки и значений φ(1), φ(2), …, φ(M) разности фаз;
последовательного вычисления первых значений оценки фазовой ошибки, вторых значений оценки фазовой ошибки и третьих значений оценки фазовой ошибки, включенных в значения φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз касательно положительного целого k, с помощью процессов вычисления; и
компенсации фазовой ошибки путем вычитания третьих значений θ±(kM+1), θ±(kM+2), …, θ±((k+1)M) оценки фазовой ошибки из значений φ(kM+1), φ(kM+2), …, φ((k+1)M) разности фаз.
| US 2004047410 A1, 11.03.2004 | |||
| US 2001026584 A1, 04.10.2001 | |||
| JP 2011101177 A, 19.05.2011 | |||
| JP2003531523 A, 21.10.2003 | |||
| JP 2000101666 A, 07.04.2000 | |||
| JPH08107434 A, 23.04.1996 | |||
| JPH10107861 A, 24.04.1998 | |||
| JP 2008278174 A, 13.11.2008 | |||
| RU 2012117835 A1, 10.12.2013 | |||
| US 2007192048 A1, 16.08.2007 | |||
| US 2006078070 A1, 13.04.2006 | |||
| YANG J | |||
| ET AL., "Near Optimum Low Complexity Smoothing Loops for Dynamical Phase Estimation -Application to BPSK Modulated Signals", IEEE TRANSACTIONS ON SIGNAL PROCESSING, (2009), vol | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| YANG ET AL., "Smoothing PLLs for QAM Dynamical Phase Estimation", 2009 IEEE INTERNATIONAL CONFERENCE ON COMMUNICATIONS (ICC 2009, (2009), pages 1-5. | |||

