Техническое решение относится к авиационной технике, а именно к электронным блокам комплексов навигации, управления и наведения летательных аппаратов (ЛА).
Такие блоки предназначены для обеспечения выполнения полетного задания с высоким качеством решения основных функциональных задач и высокой степенью безопасности полета за счет снижения или ограничения интеллектуальной нагрузки на экипаж ЛА при возникновении особых полетных ситуаций, а также заблаговременного реагирования на складывающуюся ситуацию, предотвращающего ее опасное развитие.
Широко известны блоки бортового оборудования ЛА, описанные в книге: Августов Л.И., Бабиченко А.В., Орехов М.И., Сухоруков С.Я., Шкред В.К. Навигация летательных аппаратов в околоземном пространстве / Под ред. Г.И. Джанджгавы // М.: Научтехлитиздат. - 2015, на стр. 465-477; в книге: Авиационное оборудование. Андриевский Ю.А. и др. - М.: Воениздат. 1989 г., на стр. 5-299; в книге: Дорофеев С.С. Авиационные приборы. Учебное пособие. – М.: Воениздат, 1992 г., на стр. 19-246. С помощью этих блоков осуществляется непрерывный сбор и обработка информации, предоставление ее экипажу. Экипаж ЛА выполняет наиболее сложные интеллектуальные задачи: анализирует текущую информацию - как предъявляемую средствами комплекса, так и непосредственно воспринимаемую с помощью естественных органов чувств, на основе анализа идентифицирует текущую ситуацию и состояние объектов управления (ЛА и его вооружения), соотносит результат анализа с заданным планом полета, руководствуясь личным опытом, эксплуатационными документами, требованиями полетного задания, принимает решение, с помощью органов управления осуществляет его выполнение, контролирует результаты. Сложность решения таких задач в ограниченное время создает большую нагрузку на экипаж, что нередко приводит к ошибкам, принятию неверных решений, невыполнению задания и авариям.
Попытка найти решение задачи технической диагностики путем сведения бесконечного разнообразия критических ситуаций к конечному множеству решений по управлению выводом сложной системы из критической ситуации сделана в системе поддержки экипажа в опасных ситуациях (см., RU 2128854), содержащей датчик состояния двигателей, топливной системы, гидросистему, систему электроснабжения, систему штурвального управления, систему выпуска шасси и торможения, систему жизнеобеспечения, противообледенительную систему, противопожарную систему, блок распознавания состояния конфигурации ЛА, блок распознавания режимов полета, анализатор состояния пилотажно-навигационного оборудования, анализатор состояния аппаратуры ЛА, блок распознавания аварийной ситуации, блок прогноза, состоящий из связанных блоков моделирования динамики ЛА-БО и БЗ развития АС, связанных друг с другом БЗ характеристик АС и БЗ предотвращения АС, вычислитель принятия решений о предотвращении АС, анализатор правильности действий по предотвращению АС, вычислитель принятия решений о переходе на автоматическое управление и блок предупреждения о нарушении правильности действий. При этом в системе недостаточно учитываются особенности разных типов ЛА, отсутствует возможность расширения базы знаний в процессе эксплуатации, перечень аварийных ситуаций ограничен выходом ряда наблюдаемых параметров за установленные ограничения, не обеспечивается интеллектуальная поддержка задач боевого применения ЛА и интеллектуальной поддержки в случае комплексного развития ситуации.
На расширение функциональных возможностей всех известных технических решений в данной сфере претендует беспилотный робототехнический комплекс, оснащенный системой поддержки принятия решений по RU 2353891.
Сложно добиться повышения уровня безопасности за счет введения в контуры диагностирования и принятия решений по выходу из особых ситуаций наземного вычислительного комплекса системы поддержки принятия решений, база знаний которого регулярно пополняется данными о новых возникших особых ситуациях и сценариями выхода из них в системе поддержки принятия решений экипажа воздушного судна по предотвращению особых ситуаций при выходе из эксплуатационной области (см., RU 2386569). К тому же внедрение такого устройства не позволит существенно повысить своевременность и объективность принятия решения по выходу из особой ситуации из-за необходимости привлечения к процессу выработки решения экспертов наземной части. Также уязвим к естественным и искусственным помехам канал обмена данными с наземной экспертной системой (ЭС), что приводит к утрате связи с наземной ЭС при маневрировании ЛА и удалении ЛА от наземного пункта, а сложная наземная часть системы затрудняет ее развертывание в полевых условиях. При этом ввиду естественных ограничений канала обмена данными (ограничение объема данных и запаздывание во времени) возможно формирование в наземной ЭС неадекватных ситуации и неактуальных во времени оценок и рекомендаций.
На обеспечение безопасности эксплуатации морских судов двойного действия для предотвращения риска развития аварийных ситуаций в районах Северного морского пути и повышение безопасности мореплавания направлена система поддержки принятия решений с модульной структурой для операторов судов двойного действия по RU 2713077. Указанная система учитывает влияние как внутренних, так и внешних возмущающих воздействий, однако ее оперативность недостаточна для применения на летательных аппаратах.
В Системе информационной поддержки экипажа вертолета (см. RU 2439584) повышение безопасности обеспечивается только на этапах предстартовой подготовки, запуска силовых установок, маневрирования по земной поверхности, взлета и висения за счет определения и отображения метеорологических параметров и параметров ориентации вертолета с учетом особенностей динамики его движения.
Также ограничена в функциональных возможностях и бортовая система информационной поддержки экипажа на этапе «Взлет» многодвигательного воздушного судна по RU 2550887, направленная на представление экипажу улучшенной внутрикабинной и закабинной обстановки на этапе взлета и повышение ситуационной осведомленности экипажа. Невозможность учета оперативной информации, воспринимаемой экипажем посредством естественных органов чувств, а также отсутствие механизма наращивания знаний в процессе эксплуатации в используемых системой базах знаний и отсутствие возможности управления работой экспертной системы и ее контроля со стороны экипажа, существенно ограничивает возможности данной системы.
Обеспечение безопасного взлета и посадки воздушных судов в неблагоприятных метеорологических условиях представлено, также, в системах EFVS (Enhanced Flight Vision System) и ESVS (Enhanced Synthetic Vision System), Kollsman All Weather Window; системах компании Gulfstream Aerospace Corporation, а также HUD (Head Up Display) компании Honeywell с обработкой и визуализацией изображений.
Существуют системы датчик-дисплей, обеспечивающие передачу на кабинные индикаторы экипажа изображения, полученного от датчиков: компания BAE Systems с системой технического зрения «Enhanced and Synthetic Vision Integrated Technology Evaluation (FORESITE)»; компания CMC Electronics (Канада) разработала два вида систем: СМА-2600 I - Series™ и СМА-2610 М - Series™; Компания Max-Viz, Inc (США) разработала систему EVS2500; EVS система фирмы Rockwell Collins. Однако упомянутые EVS системы не могут обеспечить экипаж изображением надлежащего качества и не решают задачи интеллектуальной поддержки экипажа в полной мере.
На повышение ситуационной осведомленности экипажа о текущем местоположении на аэродроме направлены технические решения US 2011022291 и 2011130963, а также ЕР 2355071.
Системы контроля и управления взлетом, например, ЕР № 2328054, интегрированные системы контроля пилотажных и навигационных параметров, параметров работы СУ и систем, а также состояния ВПП и внезапных факторов (см., US 2008215198), а также система и способ контроля взлета по US 2011040431 содержат визуальные информационные устройства, расположенные в кабине экипажа и устройства авионики, выходы которых связаны со входами бортовой вычислительной системы (ВВС), пользовательский интерфейс в виде индикаторов, средства радиосвязи и радионавигации, а также аудиоустройства. Вычислитель таких систем может содержать базу данных рельефа местности, базу навигационных данных, а компоненты авионики имеют как аналоговые, так и цифровые выходы, которые подключены к входам вычислителя системы.
В интеллектуальной системе поддержки экипажа (см. RU 2598130) повышают безопасность посадки ЛА за счет адаптации системы торможения к условиям посадки ЛА, однако другие режимы не учтены.
Безопасность полета в интеллектуальной системе поддержки экипажа по RU 2541902, содержащей датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы выпуска шасси и торможения, противообледенительной системы, противопожарной системы, системы воздушных сигналов (СВС), спутниковую навигационную систему (СНС), инерциальную навигационную систему (ИНС), радиовысотомер (РВ), приборную систему посадки (ПСП), систему штурвального управления (СШУ), параллельно соединенные с системой сбора бортовой информации (ССБИ), систему отображения информации (СОИ), блок распознавания аварийных ситуаций (БРАС), систему контроля разбега (СКР), систему предупреждения об опасной близости земли (СПОБЗ), систему предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ), систему контроля захода на посадку и посадки (СКЗП) и систему предупреждения о попадании в сдвиг ветра (СПОПСВ), повышают путем снижения уровня аварийных ситуаций, вызванных человеческим фактором, функциональными отказами и внешними воздействиями, ограничиваясь только лишь выдачей предупреждений о наступлении ситуации или опасном приближении к ней.
Способ технического контроля и диагностирования бортовых систем беспилотного летательного аппарата (БПЛА) с поддержкой принятия решений по RU 2557771 направлен на повышение эффективности проверки бортовых систем БПЛА.
Способ поддержки принятия клинического решения по RU 2560423 позволяет уменьшить сложность механизма принятия решений за счет сокращения количества данных, вводимых в механизм принятия решений, при диагностике аллергий и других заболеваний.
Комплекс поддержки принятия решений диспетчерским персоналом электроэнергетических систем по RU 2638632 направлен на формирование решений-рекомендаций для диспетчера по эффективному и оптимальному управлению их состоянием при разных режимах работы.
На универсальность претендует способ принятия единого согласованного решения в распределенной системе ЭВМ по RU 2706459, который заключается в оптимизации порядка согласования общего решения между независимыми равноправными автоматическими (компьютеризированными) центрами, необходимого для получения согласованного результата раунда в распределенной сети.
На повышение быстродействия путем исключения поиска оптимального плана действий в чрезвычайной ситуации по всей базе данных сервера и локализации поиска только по временным и отличительным признакам создавшейся ситуации направлена автоматизированная система поддержки принятия решений в условиях чрезвычайных ситуаций (см. RU 57481), однако она ограничена по области действия.
Представленная в RU 123991 система контроля и оповещения для принятия решений в автоматизированных системах управления технологическими процессами обладает возможностями получения дополнительной информации о ходе технологического процесса, что повышает надежность технологического процесса за счет непрерывного контроля состояния режущего инструмента, введения на основе результатов контроля коррекции в параметры технологического процесса и оповещения эксплуатационного и обслуживающего персонала в предаварийной ситуации, что в совокупности обеспечивает снижение экономических затрат на выполнение технологического процесса. Однако ее состав ограничивает сферу применения. Это же относится и к автоматизированной системе контроля по RU 119906.
Существуют технические решения, направленные на сокращение времени принятия решения в боевых условиях. Так, например, повышение быстродействия системы путем исключения поиска данных по всей базе данных сервера системы и локализации поиска данных только по идентификаторам ситуационной обстановки противостоящих группировок войск предложено в системе поддержки принятия решений по огневому поражению группировки противника RU 117665. Повышение помехозащищенности распознавания класса, типа, состава, степени угрозы, опасности и других характеристик воздушных целей и надежности автоматического принятия решения по ним представлено в RU 84997. Те же задачи решает и автоматизированная геоинформационная система поддержки принятия решения командира зенитного ракетного полка (см. RU 194853).
Автоматизированная система информационной и аналитической поддержки принятия решений в сфере авиаперевозок (см. RU 133632) позволяет получать, структурировать, анализировать и сопоставлять информацию из различных источников, что упрощает работу с информационными массивами, но не применимо для повышения безопасности полетов.
На автоматизацию процесса выбора оптимальных планов ремонтов и реконструкции гидротехнических сооружений (ГТС) и организации единого информационного пространства для всех участников процессов управления безопасностью и надежностью ГТС как при нормальной их эксплуатации, так и в случаях возникновения чрезвычайных ситуаций за счет включения в систему блока управления знаниями в сфере безопасности и надежности ГТС и базы данных портфеля ГТС всех ГЭС или иных эксплуатируемых объектов, направлена система по RU 114186.
Повышению надежности технологического процесса за счет своевременного оповещения эксплуатационного и обслуживающего персонала служат системы оповещения для принятия решений в автоматизированных системах управления технологическими процессами (см. RU 74226 и 107599).
Экспертная система поддержки принятия решений по управлению морским роботизированным технологическим комплексом по RU 181258 позволяет производить разработку задания на выполнение подводных работ, контролировать перемещения подводных аппаратов МРТК в процессе выполнения задания, выявлять нештатные ситуации и выдавать рекомендации по их преодолению.
Расширение возможностей прогнозирования поведения системы обеспечивает система поддержки принятия решений для дистанционного обучения специалистов в области навигационной аппаратуры пользователя ГЛОНАСС (см. RU 113386), однако точность прогнозирования недостаточна для применения в ЛА.
В Автоматизированной высокоинтеллектуальной системе обеспечения безопасности полета летательного аппарата (см. RU 2388663) не удается обеспечить повышение безопасности полетов только лишь за счет контроля за точностью выполнения пилотом заданных параметров различных режимов полета по маршруту с отслеживанием рельефа местности при выводе из КС. Область применения системы ограничена полетом по заданному маршруту, для которого построены эталонные параметры управления, в случае более сложного маневрирования построение таких эталонов невозможно. Ограничен перечень парируемых особых ситуаций, а также свобода действий экипажа (блокирование ручного управления). Также невозможно обеспечить учет оперативной информации, воспринимаемой экипажем посредством естественных органов чувств.
Информационно-управляющий комплекс по RU 2232376, содержит взаимосоединенные входами-выходами по магистрали информационного обмена систем радиотехнические средства навигации, обзорно-прицельные средства, системы опознавания образов, инерциальные датчики и системы, воздушные датчики и системы, индикационно-управляющие устройства, вычислительную систему комплекса, включающую взаимосоединенные по магистрали вычислительного информационного обмена блок формирования параметров состояния, блок комплексной обработки информации, блок ввода-вывода и управления информационным обменом, другой вход-выход которого является входом-выходом вычислительной системы комплекса. Он дополнительно снабжен введенными в состав вычислительной системы комплекса блоком объединенной базы данных, блоком защиты от действия естественных и искусственных помех, блоком информационной адаптации комплекса, блоком синтеза параметров окружающего пространства, блоком синтеза параметров состояния, блоком логической комплексной обработки информации, соединенных между собой и с блоком формирования параметров состояния, с блоком комплексной обработки информации, с блоком ввода-вывода и управления информационным обменом вычислительной системы комплекса по магистрали вычислительного информационного обмена. Комплекс направлен на расширение функциональных возможностей и повышение эффективности многофункциональных ЛА (МЛА), снабженных таким комплексом, однако введение упомянутых блоков в состав вычислительной системы комплекса усложняет систему в целом, что снижает ее надежность. При этом не обеспечивается формирование и выдача на индикаторы действенных рекомендаций с учетом прогнозных значений.
Известно устройство поддержки принятия решений по предотвращению особых ситуаций при выполнении полета на летательном аппарате (см. RU 2417394). За счет улучшенной обработки данных и их индикации в нем формируется дополнительная информация и, как следствие, увеличивается интеллектуальная нагрузка на экипаж. Анализ этой информации и соотнесение ее с другими источниками данных, при том, что идентификация ситуации и принятие решения по управлению остаются за экипажем, а также необходимость использования дополнительного индикатора, усложняет приборную доску кабины и логику работы с ней. К тому же требуется дополнительное время на переключение внимания.
Несмотря на многочисленные приведенные технические решения, совокупность их признаков при использовании не позволяет обеспечить оперативное формирование прогнозных действенных рекомендаций в различных формах при расширенных функциональных возможностях.
Задача, на решение которой направлено техническое решение и достигаемый при этом технический результат заключаются в оперативном формировании прогнозных действенных рекомендаций в различных формах при расширенных функциональных возможностях.
Создание блока интеллектуальной поддержки, оперативно формирующего прогнозные действенные рекомендации в различных формах при расширенных функциональных возможностях, обеспечено составом входящих в него элементов и их эффективным взаимодействием.
Для этого в блоке интеллектуальной поддержки (БИП), содержащем блок ввода информации от систем и устройств комплекса (БВИ), блок прогноза развития ситуаций (БПРОС), блок формирования данных для блока принятия решения (БФД), блок принятия решения (БПР), блок хранения логических правил (БХЛП), блок хранения специальной информации (БХСИ), блок формирования сообщений и сигналов управления (БФССУ), блок обратной связи - приема информации от экипажа (БОСЭ), блок имитационных моделей комплекса, объекта и внешней среды (БИМ), БФССУ оснащен блоком формирования визуальных текстово-символьных сообщений (БФ-ТСИ), блоком формирования справочной информации (БФ-СпрИ), блоком формирования аудиальной речевой и звуковой информации (БФ-РЗИ), блоком взаимодействия с индикационными устройствами (БВ-ИУ), блоком взаимодействия с аудиоаппаратурой (БВ-АУ), блоком формирования сигналов управления системами и устройствами (БФСУ), блоком выдачи сигналов управления (БВСУ), при этом блок хранения специальной информации (БХСИ) выполнен с возможностью хранения текстово-символьных лексем (БХ-ТС), справочных данных (БХ-Спр) и данных для речевого синтеза (БХ-РС).
Технический результат достигается также тем, что в блоке интеллектуальной поддержки (БИП) блок принятия решения БПР содержит блок формирования локальных выводов по 1-й группе ситуаций, связанных с решением задач самолето/вертолетовождения и навигации и критическими режимами (БФЛВ-Г1), блок формирования локальных выводов по 2-й группе ситуаций, связанных с техническим состоянием летательного аппарата, его оборудования и вооружения (БФЛВ-Г2), блок формирования локальных выводов по 3-й группе ситуаций, связанных с внешними угрозами безопасности и использованием воздушного пространства (БФЛВ-Г3), блок формирования локальных выводов по 4-й группе ситуаций, связанных с тактическим и специальным применением летательного аппарата (БФЛВ-Г4), блок формирования локальных выводов по 5-й группе ситуаций, связанных с потенциальными возможностями и текущим состоянием экипажа (БФЛВ-Г5), и блок формирования интегральных экспертных выводов (БФИЭВ);
Тому же способствует то, что блок хранения логических правил БХЛП содержит блоки хранения логических правил по 1-й группе ситуаций, связанных с решением задач самолето/вертолетовождения и навигации и критическими режимами (БЛП-Г-1), 2-й группе ситуаций, связанных с техническим состоянием летательного аппарата, его оборудования и вооружения (БЛП-Г-2), 3-й группе ситуаций, связанных с внешними угрозами безопасности и использованием воздушного пространства (БЛП-Г-3), 4-й группе ситуаций, связанных с тактическим и специальным применением летательного аппарата (БЛП-Г-4), 5-й группе ситуаций, связанных с потенциальными возможностями и текущим состоянием экипажа (БЛП-Г-5), а также блок хранения логических правил по интеграции ситуаций разных групп (БЛП-ИГ), соединенных с блоком загрузки логических правил (БЗЛП) по магистрали вычислительного информационного обмена.
На достижение технического результата направлено также то, что блок обратной связи - приема информации от экипажа (БОСЭ) содержит блок ввода экипажем параметрической информации (БВЭИ), блок ввода экипажем команд управления (БВЭУ), блок ввода данных о потенциальных возможностях экипажа (БВВЭ), блок контроля текущего состояния экипажа (БКСЭ).
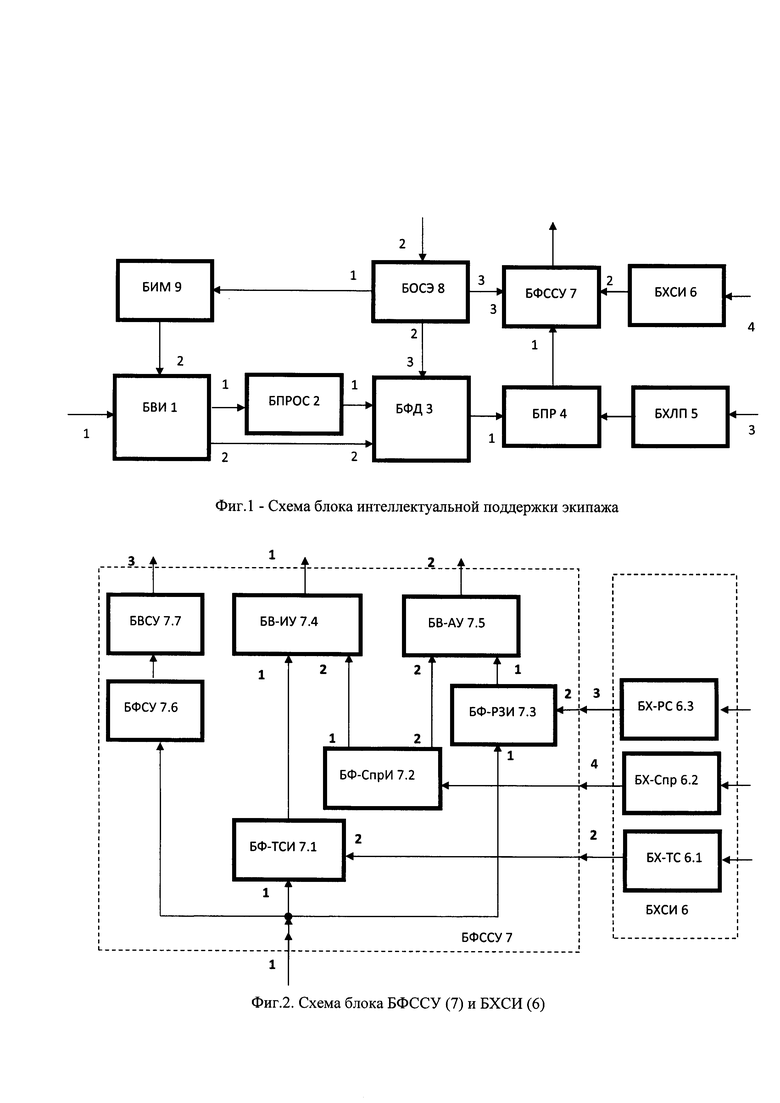
На фиг. 1 представлена схема блока интеллектуальной поддержки экипажа (БИП), который содержит:
1 - Блок ввода информации от систем и устройств комплекса (БВИ);
2 - Блок прогноза развития ситуаций (БПРОС);
3 - Блок формирования данных для блока принятия решения (БФД);
4 - Блок принятия решения (БПР);
5 - Блок хранения логических правил (БХЛП);
6 - Блок хранения специальной информации (БХСИ);
7 - Блок формирования сообщений и сигналов управления (БФССУ);
8 - Блок обратной связи - приема информации от экипажа (БОСЭ);
9 - Блок имитационных моделей комплекса, объекта и внешней среды (БИМ).
На фиг. 2 показана схема блока формирования сообщений и сигналов управления, который на фиг. 1 обозначен как БФССУ 7, и блока хранения специальной информации, который на фиг. 1 обозначен как БХСИ 6. При этом блок БФССУ содержит:
7.1 - Блок формирования визуальных текстово-символьных сообщений (БФ-ТСИ);
7.2 - Блок формирования справочной информации (БФ-СпрИ);
7.3 - Блок формирования аудиальной речевой и звуковой информации (БФ-РЗИ);
7.4 - Блок взаимодействия с индикационными устройствами (БВ-ИУ);
7.5 - Блок взаимодействия с аудиоаппаратурой (БВ-АУ);
7.6 - Блок формирования сигналов управления системами и устройствами (БФСУ);
7.7 - Блок выдачи сигналов управления (БВСУ), а блок БХСИ содержит:
6.1 - Блок хранения текстово-символьных лексем (БХ-ТС);
6.2 - Блок хранения справочных данных (БХ-Спр);
6.3 - Блок хранения данных для речевого синтеза (БХ-РС).
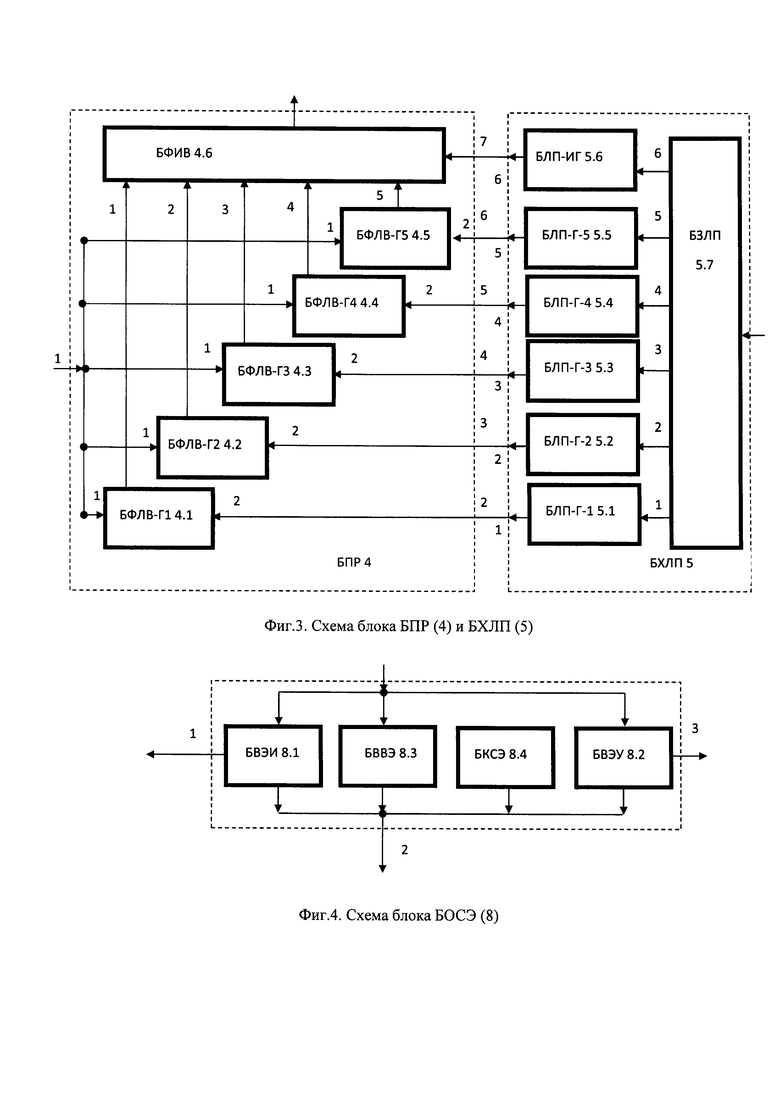
На фиг. 3 показана схема блока принятия решения, который на фиг. 1 обозначен как БПР 4, и блока хранения логических правил, который на фиг. 1 обозначен как БХЛП 5. При этом блок БПР содержит:
4.1 - Блок формирования локальных выводов по 1-й группе ситуаций (БФЛВ-Г1);
4.2 - Блок формирования локальных выводов по 2-й группе ситуаций (БФЛВ-Г2);
4.3 - Блок формирования локальных выводов по 3-й группе ситуаций (БФЛВ-Г3);
4.4 - Блок формирования локальных выводов по 4-й группе ситуаций (БФЛВ-Г4);
4.5 - Блок формирования локальных выводов по 5-й группе ситуаций (БФЛВ-Г5);
4.6 - Блок формирования интегральных экспертных выводов (БФИВ), а блок БХЛП содержит:
5.1 - Блок хранения логических правил 1-й группе ситуаций (БЛП-Г-1);
5.2 - Блок хранения логических правил 2-й группе ситуаций (БЛП-Г-2);
5.3 - Блок хранения логических правил 3-й группе ситуаций (БЛП-Г-3);
5.4 - Блок хранения логических правил 4-й группе ситуаций (БЛП-Г-4);
5.5 - Блок хранения логических правил 5-й группе ситуаций (БЛП-Г-5);
5.6 - Блок хранения логических правил по интеграции ситуаций разных групп (БЛП-ИГ);
5.7 - Блок загрузки логических правил (БЗЛП).
На фиг. 4 показана схема блока обратной связи - приема информации от экипажа (БОСЭ), который на фиг. 1 обозначен как БОСЭ 8 и содержит:
8.1 - блок ввода экипажем параметрической информации (БВЭИ);
8.2 - блок ввода экипажем команд управления (БВЭУ);
8.3 - блок ввода данных о потенциальных возможностях экипажа (БВВЭ);
8.4 - блок контроля текущего состояния экипажа (БКСЭ).
Блок интеллектуальной поддержки экипажа функционирует так.
Блоки БВИ 1, БПРОС 2, БФД 3, БОСЭ 8, БИМ 9 (фиг. 1) формируют исходные данные для блока принятия решения, осуществляя сбор информации от измерительных датчиков и систем, от бортового вычислителя, от экипажа, а также осуществляя прогнозирование изменения различных параметров по соответствующим моделям. В блоках БПР 4, БФССУ 7, БХЛП 5, БХСИ 6 (фиг. 1) на основании этих исходных данных осуществляется решение логической задачи по идентификации актуальной полетной ситуации и формированию рекомендаций по наиболее рациональным действиям в этой ситуации.
Для этого на первый вход блока БИП, являющийся первым входом блока БВИ 1 (фиг. 1) поступают в виде многомерных векторов N, J, К измеренные бортовыми измерительными системами и вычисленные в бортовом вычислителе данные о состоянии ЛА, его оборудования и вооружения, внешнего пространства и объектов, а также экипажа. На второй вход блока БВИ 1 (фиг. 1) поступают в виде многомерных векторов Nм, Jм, Kм данные о состоянии моделей ЛА, его оборудования и вооружения, внешней среды и объектов, формируемыми соответствующими моделями в блоке БИМ 9 (фиг. 1). В блоке БВИ 1 (фиг. 1) собранная информация сортируется по функциональным группам, соответствующим различным полетным ситуациям, режимам и объектам, после чего сгруппированные данные передается на входы блоков БФД 3 и БПРОС 2 (фиг. 1).
В блоке БПРОС 2 (фиг. 1) на основе принятых текущих данных осуществляется прогнозирование развития полетных ситуаций. Прогнозирование осуществляется одновременно для всех возможных ситуаций, причем возможность тех или иных ситуаций определяется в зависимости от того, в какие области значений попадают элементы принимаемых многомерных векторов. Прогнозирование осуществляется путем численного решения уравнений, связывающих параметры, описывающие модель полетной ситуации в общем виде

где
N - многомерный вектор состояния ЛА, его оборудования и вооружения;
J - многомерный вектор измерительной информации;
K - многомерный вектор информации о контролируемых параметрах внешней среды и объектов;
Nм - многомерный вектор состояния моделей ЛА, его оборудования и вооружения;
Jм - многомерный вектор моделей измерительной информации;
Kм - многомерный вектор моделей внешней среды и объектов;
{А} - выборка из многомерного вектора А;
Si - параметры состояния, которыми описывается i-ая особая полетная ситуация;
t - время;
 - алгоритм обработки информации для формирования прогнозируемого значения вектора состояния.
- алгоритм обработки информации для формирования прогнозируемого значения вектора состояния.
При решении уравнения (1) параметр t меняется от текущего значения в сторону увеличения, т.е. для будущих моментов времени вплоть до момента TOCi наступления i-той особой ситуации. Если прогнозируемая величина TOCi имеет конечную величину, то осуществляется расчет нескольких специальных временных рубежей до ее наступления, соответствующих нескольким интервалам времени прогнозируемого полета: интервал безопасный, когда наступление ситуации достаточно далеко и можно не предпринимать дополнительных к выполняемым действий, интервал предупреждающий, когда возможно наступление ситуации и возможно применения мягких действий по ее парированию, интервал опасности, когда ситуация неизбежно наступит, если не предпринимать дополнительных действий, интервал особой опасности, когда для парирования особой ситуации нужны весьма энергичные действия. Величины TOCi и значения рубежей также включены в состав текущего вектора Si(t). Данные, формируемые в блоке БПРОС 2 (фиг. 1) поступают на вход блока БФД 3 (фиг. 1).
В блоке БОСЭ 8 (фиг. 1) осуществляется прием и формирование различной информации от экипажа и о состоянии экипажа. При этом блок БОСЭ 8 (фиг. 1) своим входом, объединяющим входы включенных в его состав блоков, подключен к выходу систем информационно-управляющего поля кабины (ИУП), посредством которых экипаж осуществляет управление и информационное взаимодействие с ЛА, его оборудованием и вооружением. Блок БВЭИ 8.1 (фиг. 4) осуществляет взаимодействие с информационно-управляющим полем кабины при вводе экипажем различной информации о состоянии контролируемых объектов, блок БВЭУ 8.2 (фиг. 4) - при вводе экипажем команд управления блоком формирования сообщений и сигналов управления БФССУ 7 (фиг. 1). Блок БВВЭ 8.3 (фиг. 4) осуществляет ввод параметров, характеризующих потенциальные возможности экипажа, записанные на электронный носитель информации или посредством ИУП. Блок БКСЭ 8.4 (фиг. 4) осуществляет формирование данных о текущем физическом состоянии экипажа на основе объективных данных, получаемых от внешних или включенных в состав этого блока биометрических датчиков. Эти параметры с выходов блока БОСЭ поступают на входы блоков БИМ 9, БФД 3 и БФССУ 7 (фиг. 1).
В блоке БФД 3 (фиг. 1) на основе данных, поступающих из блоков БВИ 1 (фиг. 1), БПРОС 2 (фиг. 1), БОСЭ 8 (фиг. 1) осуществляется формирование пакетов исходных данных для блока БПР 4 (фиг. 1), которые поступают на первый вход этого блока.
В блоке БПР 4 (фиг. 3) принятые с первого входа пакеты исходных данных поступают на входы блоков БФЛВ-Г1 4.1, БФЛВ-Г2 4.2, БФЛВ-Г3 4.3, БФЛВ-Г4 4.4, БФЛВ-Г5 4.5 (фиг. 3), в каждом из которых в темпе реального времени составляются логические последовательности экспертных суждений по соответствующей группе ситуаций, соответствующие актуальному набору входных данных. Формирование логических последовательностей осуществляется иерархично: выводы, полученные при применении суждений одного уровня, в качестве новых исходных данных используются при применении суждений следующего уровня. Поиск окончательного вывода завершается при исчерпании всех наличных исходных данных и полученных на их основе промежуточных выводов всех возможных уровней. В результате работы каждого из блоков БФЛВ-Г1 4.1, БФЛВ-Г2 4.2, БФЛВ-Г3 4.3, БФЛВ-Г4 4.4, БФЛВ-Г5 4.5 (фиг. 3) на их выходах формируются признаки, идентифицирующие полетную ситуацию из соответствующей группы (1-й, 2-й, 3-й, 4-й, 5-й) и рекомендации по действиям в этой идентифицированной ситуации. Для учета взаимного влияния ситуаций из разных групп друг на друга и окончательного формирования рекомендаций результаты работы блоков БФЛВ-Г1 4.1, БФЛВ-Г2 4.2, БФЛВ-Г3 4.3, БФЛВ-Г4 4.4, БФЛВ-Г5 4.5 (фиг. 3) подаются на входы 1-5 блока БФИВ 4.6 (фиг. 3), в котором осуществляется построение логической последовательности экспертных суждений, соответствующей набору идентифицирующих признаков и рекомендаций для ситуаций из отдельных групп, полученных на выходах блоков БФЛВ-Г1 4.1, БФЛВ-Г2 4.2, БФЛВ-Г3 4.3, БФЛВ-Г4 4.4, БФЛВ-Г5 4.5 (фиг. 3). Логическая последовательность экспертных суждений, выстраиваемая в блоке БФИВ 4.6 (фиг. 3), объединяет выводы для отдельных групп ситуаций и своим результатом имеет: окончательную идентификацию ситуации как композиции возможных ситуаций из разных групп, и интегральные рекомендации по необходимым действиям, учитывающим эту композицию. Констатирующие утверждения, идентифицирующие комплексную ситуацию, вместе с интегральными рекомендациями с выхода блока БФИВ 4.6 (фиг. 3), являющегося выходом блока БПР 4 (фиг. 1, 3) поступают на вход блока БФССУ 7 (фиг. 1).
При этом правила, представляющие собой формализованную запись конкретных экспертных суждений, из которых в блоках БФЛВ-Г1 4.1, БФЛВ-Г2 4.2, БФЛВ-Г3 4.3, БФЛВ-Г4 4.4, БФЛВ-Г5 4.5, БФИВ 4.6 (фиг. 3) из состава блока БПР 4 (фиг. 1, 3) составляются логические последовательности, поступают на входы 2-7 блока БПР 4 (фиг. 1), являющихся вторыми входами блоков БФЛВ-Г1 4.1, БФЛВ-Г2 4.2, БФЛВ-Г3 4.3, БФЛВ-Г4 4.4, БФЛВ-Г5 4.5, БФИВ 4.6 (фиг. 3) соответственно, с 1-6 выходов блока БХЛП 5 (фиг. 3), в котором они хранятся в виде специально структурированной по тематическим разделам области памяти. Для этого в состав блока БХЛП 5 (фиг. 1, 3) введены блоки БЛП-Г1 5.1, БЛП-Г2 5.2, БЛП-Г3 5.3, БЛП-Г4 5.4, БЛП-Г5 5.5 (фиг. 3), в которых хранятся правила для формирования рекомендаций по действиям в особых ситуациях 1-й, 2-й, 3-й, 4-й и 5-й групп соответственно, введен также блок БЛП-ИГ 5.6 (фиг. 3), в котором хранятся правила для формирования интегральных рекомендаций, введен также блок БЗЛП 5.7 (фиг. 3), осуществляющий загрузку логических правил извне при их корректировке или обновлении, осуществляемых при расширении функциональных возможностей комплекса бортового оборудования, оснащенного таким блоком БИП.
Результатом работы блока БПР 4 (фиг. 3) является идентификатор сообщения экспертной системы, которое должно быть сформировано и предъявлено экипажу. Идентификатор включает в себя идентификатор ситуации и конкретного рекомендуемого экипажу действия. Идентификатор сообщения из блока БПР 4 (фиг. 1) поступает на первый вход блока БФССУ 7 (фиг. 1, 2), на второй вход которого поступает информация из блока БХСИ 6 (фиг. 1), а на третий вход - команды управления из блока БОСЭ 8 (фиг. 1).
В блоке БФССУ 7 (фиг. 2) эта информация поступает на входы блоков БФСУ 7.6, БФ-ТСИ 7.1 и БФ-РЗИ 7.3 (фиг. 2). На другие входы блоков БФ-ТСИ 7.1 и БФ-РЗИ 7.3 (фиг. 2) с выходов блоков БХ-ТС 6.1 и БХ-РС 6.3 (фиг. 2) соответственно, входящих в состав блока БХСИ 6 (фиг. 1, 2) поступают фрагменты текстово-символьных и звуко-речевых сообщений, которые хранятся в этих блоках в виде специальных словарей-библиотек. В блоках БХ-ТС 6.1 и БХ-РС 6.3 (фиг. 2) из этих фрагментов в соответствии идентификатором сообщения от блока БПР 4 (фиг. 1) и управляющими командами от блока БОСЭ 8 (фиг. 1) осуществляется окончательный синтез сообщения для экипажа, соответственно, в визуальном (текстовом, графическом, световом) или аудиальном (звуковом или речевом) виде. Эти сообщения посредством блока БВ-ИУ 7.4 (фиг. 2) и БВ-АУ 7.5 (фиг. 2) передаются на входы индикационных устройств и аудиоаппаратуры, осуществляющих непосредственное доведение сообщений до экипажа.
По желанию летчика включается режим формирования справочной информации. Для этого по команде, поступающей из блока БОСЭ 8 (фиг. 1) на третий вход блока БФССУ 7 (фиг. 1), выдача данных из блоков БФ-ТСИ 7.1 и БФ-РЗИ 7.3 (фиг. 2) на входы блоков БВ-ИУ 7.4 (фиг. 2) и БВ-АУ 7.5 (фиг. 2) приостанавливается, и на их вторые входы поступает справочная информация в виде текстово-символьных или речевых сообщений, сформированных по этой команде в блоке БФ-СпрИ 7.2 (фиг. 2) из фрагментов справочных данных, хранящихся в блоке БХ-Спр 6.2 (фиг. 2), включенном в состав блока БХСИ 6 (фиг. 1).
Также по желанию летчика включается режима автоматического управления бортовыми исполнительными устройствами и системами. Для этого по команде, поступающей из блока БОСЭ 8 (фиг. 1) на третий вход блока БФССУ 7 (фиг. 1), идентификатор сообщения, поступающий из блока БПР 4 (фиг. 1) на первый вход блока БФССУ 7 (фиг. 1, 2), подается на вход блока БФСУ 7.6 (фиг. 2), где в соответствии с рекомендуемыми в данном сообщении действиями формируются необходимые команды и параметрическая информация для управления оборудованием. Эти данные посредством блока БВСУ 7.7 (фиг. 2) с третьего выхода (фиг. 2) блока БФССУ 7 (фиг. 2) передаются по назначению.
| название | год | авторы | номер документа |
|---|---|---|---|
| Информационно-управляющий комплекс с интеллектуальной поддержкой экипажа | 2020 |
|
RU2755097C1 |
| Способ интеллектуальной поддержки экипажа | 2020 |
|
RU2767406C1 |
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЯ ПО ПРОВЕДЕНИЮ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В ОГРАНИЧЕННОЕ ВРЕМЯ | 2019 |
|
RU2728946C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ ФУНКЦИЙ УПРАВЛЕНИЯ ВОЗДУШНЫМ СУДНОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2606153C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ОБЪЕКТОВ | 2014 |
|
RU2585991C2 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ПОДДЕРЖКИ ДЕЯТЕЛЬНОСТИ ЭКИПАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2018966C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| Способ интеллектуальной поддержки экипажа летательного аппарата при выполнении им этапа полета | 2020 |
|
RU2751377C1 |
Настоящее техническое решение относится к области вычислительной техники для авиации. Технический результат заключается в повышении безопасности выполнения полета за счет снижения интеллектуальной нагрузки на экипаж летательного аппарата, а также повышения скорости формирования прогнозных действенных рекомендаций при возникновении особых ситуаций. Технический результат достигается за счёт блока ввода информации от систем и устройств комплекса, блока прогноза развития ситуаций, блока формирования данных для блока принятия решения, блока принятия решения, блока хранения логических правил, блока хранения специальной информации (БХСИ), блока формирования сообщений и сигналов управления (БФССУ), блока обратной связи - приема информации от экипажа, блока имитационных моделей комплекса, объекта и внешней среды, в котором БФССУ оснащен блоком формирования визуальных текстово-символьных сообщений, блоком формирования справочной информации, блоком формирования аудиальной речевой и звуковой информации, блоком взаимодействия с индикационными устройствами, блоком взаимодействия с аудиоаппаратурой, блоком формирования сигналов управления системами и устройствами, блоком выдачи сигналов управления, при этом БХСИ выполнен для хранения текстово-символьных лексем, справочных данных и данных для речевого синтеза. 3 з.п. ф-лы, 4 ил.
1. Блок интеллектуальной поддержки и помощи принятия решения экипажа (БИП), содержащий блок ввода информации от систем и устройств комплекса (БВИ), блок прогноза развития ситуаций (БПРОС), блок формирования данных для блока принятия решения (БФД), блок принятия решения (БПР), блок хранения логических правил (БХЛП), блок хранения специальной информации (БХСИ), блок формирования сообщений и сигналов управления (БФССУ), блок обратной связи - приема информации от экипажа (БОСЭ), блок имитационных моделей комплекса, объекта и внешней среды (БИМ), в котором БФССУ оснащен блоком формирования визуальных текстово-символьных сообщений (БФ-ТСИ), блоком формирования справочной информации (БФ-СпрИ), блоком формирования аудиальной речевой и звуковой информации (БФ-РЗИ), блоком взаимодействия с индикационными устройствами (БВ-ИУ), блоком взаимодействия с аудиоаппаратурой (БВ-АУ), блоком формирования сигналов управления системами и устройствами (БФСУ), блоком выдачи сигналов управления (БВСУ), при этом блок хранения специальной информации (БХСИ) выполнен с возможностью хранения текстово-символьных лексем (БХ-ТС), справочных данных (БХ-Спр) и данных для речевого синтеза (БХ-РС).
2. Блок интеллектуальной поддержки (БИП) по п. 1, в котором блок принятия решения БПР содержит блок формирования локальных выводов по 1-й группе ситуаций, связанных с решением задач самолето/вертолетовождения и навигации и критическими режимами (БФЛВ-Г1), блок формирования локальных выводов по 2-й группе ситуаций, связанных с техническим состоянием летательного аппарата, его оборудования и вооружения (БФЛВ-Г2), блок формирования локальных выводов по 3-й группе ситуаций, связанных с внешними угрозами безопасности и использованием воздушного пространства (БФЛВ-Г3), блок формирования локальных выводов по 4-й группе ситуаций, связанных с тактическим и специальным применением летательного аппарата (БФЛВ-Г4), блок формирования локальных выводов по 5-й группе ситуаций, связанных с потенциальными возможностями и текущим состоянием экипажа (БФЛВ-Г5) и блок формирования интегральных экспертных выводов (БФИЭВ).
3. Блок интеллектуальной поддержки (БИП) по п. 1, в котором блок хранения логических правил БХЛП содержит блоки хранения логических правил по 1-й группе ситуаций, связанных с решением задач самолето/вертолетовождения и навигации и критическими режимами (БЛП-Г-1), 2-й группе ситуаций, связанных с техническим состоянием летательного аппарата, его оборудования и вооружения (БЛП-Г-2), 3-й группе ситуаций, связанных с внешними угрозами безопасности и использованием воздушного пространства (БЛП-Г-3), 4-й группе ситуаций, связанных с тактическим и специальным применением летательного аппарата (БЛП-Г-4), 5-й группе ситуаций, связанных с потенциальными возможностями и текущим состоянием экипажа (БЛП-Г-5), а также блок хранения логических правил по интеграции ситуаций разных групп (БЛП-ИГ), соединенных с блоком загрузки логических правил (БЗЛП) по магистрали вычислительного информационного обмена.
4. Блок интеллектуальной поддержки (БИП) по п. 1, в котором блок обратной связи - приема информации от экипажа (БОСЭ) содержит блок ввода экипажем параметрической информации (БВЭИ), блок ввода экипажем команд управления (БВЭУ), блок ввода данных о потенциальных возможностях экипажа (БВВЭ), блок контроля текущего состояния экипажа (БКСЭ).
| СПОСОБ ПОДДЕРЖКИ ОПЕРАТОРА ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНЫХ СИТУАЦИЯХ | 2001 |
|
RU2205442C1 |
| RU 2013119843 A, 20.12.2014 | |||
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| US 4538994, 03.09.1985. | |||

