Система относится к авиационному бортовому оборудованию и предназначена для установки на гражданские летательные аппараты (ЛА) для поддержки решений экипажа в опасных (катастрофических или аварийных) ситуациях.
Известна экспертная система (ЭС), ориентированная на диагностику деятельности экипажа при анализе полетной информации, зарегистрированной бортовыми самописцами в системе "Луч-84" [1]. Предупреждение отклонений в летной работе экипажей воздушных судов (ВС) гражданской авиации производится с помощью ЭС в целях повышения безопасности полетов и эффективности работы экипажей. ЭС имитирует рассуждения высококвалифицированных экспертов в процессе анализа и оценки выполнения экипажами полетов и сообщает информацию о наиболее вероятных причинах допущенных экипажем ошибок и соответствующих управляющих воздействиях.
С помощью эксперта инженер по знаниям формирует гипотезы- умозаключения, касающиеся различных аспектов деятельности экипажей. В общем случае гипотеза - есть конкатенция (цепочка) на некотором множестве фактов или других гипотез нижнего уровня иерархии. Инженер по знаниям вводит сформулированные гипотезы в базу знаний (БЗ), что влечет за собой также формирование вопросника предметной области, добавление новых текстов и таблиц объявлений. После этого система готова к диагностике данных, поступающих с магнитной ленты системы "Луч-84".
На вход программы-конвертора поступают данные, считываемые с магнитной ленты "Луч-84" и обрабатываемые комплексом программных средств. Программа-конвертор преобразует числовые данные о полете во множество факторов предполетной области. Сформированные таким образом факты поступают на вход ЭС, после чего проводится анализ выполнимости гипотез предметной области. Недостающие для проверки гипотез факты вводятся пользователем в диалоговом режиме. В случае истинности гипотезы пользователь может просмотреть цепочки объяснений данной гипотезы.
Эксперту предоставлены возможности использования всех директив, заключенных в систему: добавление и удаление фактов, выборочная проверка гипотез, работа с библиотеками, куда записываются ответы пользователя и т.д.
БЗ представляет собой совокупность гипотез-умозаключений. Каждая гипотеза может быть определена следующим образом
H<---(F&HL&L&P),
где F - множество фактов предметной области (получается на основе ответов пользователя);
HL - множество гипотез нижнего уровня (по отношению к данной);
L - множество литералов, определяющих количественные отношения между рангами фактов (ранги вводятся пользователем в режиме работы с рангами);
P - множество слотов-процедур.
Каждый факт - это выражение следующего вида:
F = (A,V),
где - A - один или группа ответов пользователя, удовлетворяющих данному факту;
V - ранг ответа пользователя (точечные значения или интервал).
Литералы, определяющие отношения между рангами, позволяют задавать отношения типа "равно", "больше", "меньше" и т.п.
Слоты-процедуры позволяют вычислять значения произвольных параметров, заданных в гипотезе, на основе имеющихся ответов пользователя либо путем предъявления дополнительных опросных процедур. ЭС реализована на ЭВМ на языке ПРОЛОГ.
Однако данная система обработки и диагностики не является советчиком, помогающим экипажу в определении приоритетов сигналов тревоги и выделении наиболее важных из них, критических ситуаций. Для получения высокой достоверности в обработке и диагностике сигналов тревоги по данным информации датчиков должна использоваться диагностическая система реального времени (РВ), которая путем прогнозирования возможных неисправностей определяет последовательность управляющих действий экипажа. Для работы ЭС необходима информация о состоянии бортового оборудования (БО) и должен осуществляться основной процесс: на основе имеющихся фактов в базе данных (БД) и БЗ и состоянии БО формируются новые факты, характеризующие текущую ситуацию на ЛА в реальном времени. Та часть информации в БД критических ситуаций, которая сформирована дедуктивной системой и определяет необходимые воздействия на ЛА, должна направляться экипажу в качестве рекомендаций, а если он не выполняет их, то на исполнительные механизмы системы автоматического управления (САУ).
Известна управляющая ЭС [2] , для оказания помощи оператору, решающая следующие задачи: распознавание критической ситуации, принятие решений по управлению выводом сложной системы (объекта) из критической ситуации, выбор управляющих воздействий и контроль эффективности их реализации. В системе "человек-техника" критические ситуации, возникающие вследствие отказов техники, ошибок человека и неблагоприятных внешних условиях приводят в случае непринятия своевременных и правильных управляющих решений к аварии или катастрофе. Принятие решений человеком, управляющим сложной системой, затруднено вследствие многомерности фактов для анализа, неопределенности и неоднозначности описания критических ситуаций, малым резервом времени и большой психологической нагрузкой.
В БЗ входят знания о предметной области управления сложной системой в критических ситуациях. В системе знания о проблемной области структурированы, исходя из цели построения управляющей ЭС, оказание помощи управляющему в принятии решений при возникновении критических ситуаций.
В качестве инструментального средства оказания помощи эксперту в выражении своей концептуальной модели проблемной области используется программная система создания и ведения БД характеристик критических ситуаций и баз знаний БЗ. Система выполняет функции автоматизации получения знаний от экспертов. Данные представляются реляционной БД характеристик критических ситуаций, выполняется проверка целостности создания БД, производится ситуационная кластеризация данных.
В процессе экспертного опроса для обеспечения необходимой полноты БЗ экспертам ставится задача анализа новых для них ситуаций; способ решения задачи экспертной классификации является способ организации экспертных игр с коллективом экспертов. Сценарии экспертных игр предусматривают рассмотрение известных и новых для экспертов примеров критических ситуаций; в диалоге с ЭВМ заполняется БД. Создание и заполнение БД осуществляется с помощью средств систем управления реляционной БД для персональных ЭВМ с применением интеллектуального многооконного интерфейса. Окончательно согласован- ные экспертные оценки хранятся в БД и являются основной для создания правил распознавания критических ситуаций и принятия решений в БЗ ЭС.
Представление знаний об управлении системой в критических ситуациях осуществляется с помощью продукционной модели, позволяющей представлять правила распознавания ситуаций и принятия решений. В качестве критерия распознавания классов критических ситуаций в управляющей ЭС используется степень близости распознаваемой ситуации, представленной вектором, к описаниям классов критических ситуаций.
Однако, при такой структуре ЭС управления система бортовых датчиков не включается в цикл работы по пилотированию ЛА. Динамические характеристики современных ЛА отличаются пониженной статистической устойчивостью, что привело к существенному усложнению САУ и значительному расширению их функциональных возможностей. В то же время увеличение сложности САУ способствовало существенному увеличению разнообразия отказов этих систем. Поэтому стала практически невозможной разработка только инструктивных указаний по действиям пилота при возникновении каждого из возможных отказов. Подробные инструкции можно разработать только для ограниченного перечня отказов, в пределах эксплуатационных ограничений ЛА-БО. Возникновение же в полете отказов, действия по устранению которых предварительно не отрабатывались и не отражены в инструкциях, представляют серьезную проблему. Как показывает анализ катастроф ЛА, нежелательное развитие событий можно было бы предотвратить, если бы были выполнены соответствующие грамотные действия экипажа. Однако время, которым располагает пилот для этого, обычно не превышает несколько секунд, а принимая во внимание стрессовое состояние человека во время аварии, становится ясно, что пилот может и не найти единственно правильного решения в нужный момент.
Известна комплексная информационная система сигнализации (КИСС) для предупреждения экипажа о возникновении опасных ситуаций (сигнальная информация), выдачи информации о параметрах и состоянии систем самолета и двигателей (в виде мнемокадров), отображения информации об отказах и результате контроля систем самолета [3], взятая за прототип.
Информация, выдаваемая системой, отображается на экранах многофункциональных индикаторов (ИМ). Управление индикацией осуществляется с пультов управления (ПУИ). Сигнальная информация (в виде текстов) автоматически отображается на левом ИМ, а при необходимости может быть вручную вызвана на правый. В зависимости от срочности действия экипажа в той или иной ситуации КИСС обеспечивает выдачу сигнальной информации трех категорий: аварийной, предупреждающей и уведомляющей (отображается на экране различными цветами). Аварийные и предупреждающие сигналы сопровождаются загоранием центральных сигнальных огней (ЦСО) и звуковым сигналом (гонг).
Отображение информации об отказах и результатах контроля систем в виде текста возможно по вызову с ПУИ кнопкой, при контроле системы с помощью панели контроля на приборной доске бортинженера.
Для увеличения надежности система выполнена двухканальной с перекрестными связями между каналами. Система самоконтролируется. В случае обнаружения отказов в системе она автоматически перестраивается таким образом, чтобы оставшимися исправными элементами полностью или частично выполнить свою задачу (реконфигурация системы). В состав каждого из каналов входят блоки преобразования сигналов (БПС), блоки вычислительного устройства (БВУ), блок формирования изображений (БФИ), индикатор многофункциональный (ИМ), ПУИ. Блоки БПС преобразуют дискретные и аналоговые сигналы в цифровой двоичный код. Блок БВУ производит логическую обработку сигналов, в результате которой устанавливается наличие ситуаций в системах, требующих уведомления или вмешательства экипажа, а также необходимость и очередность выдачи сигнальной информации. Сигналы в цифровом коде подаются в МСРП на запись. Блок БВУ вырабатывает сигнал "запуск ЦСО", который подается в систему аварийной, предупреждающей и уведомляющей сигнализации (САС) и вызывает срабатывание ЦСО в проблесковом режиме, формирует сигналы "отказ КИСС", звуковые тональные сигналы. Блок БФИ управляет движением луча по экрану, обеспечивая построение необходимого формата изображения. ИМ предназначен для отображения визуальной информации в виде текстов, шкал, мнемосхем. ПУИ предназначен для ручного управления отображением информации на экране ИМ.
КИСС по отношению к системам, которые к ней подключены, выполняет различные функции: выдает сигнальную информацию, мнемокадры, отказы систем при нажатии кнопки "Блоки" на ПУИ, отказы после нажатия соответствующих кнопок на панели контроля.
Системы, подключенные к КИСС:
1. Двигатели.
2. Вспомогательная силовая установка (ВСУ).
3. Топливная система.
4. Гидросистема (ГС).
5. Система электроснабжения (СЭС) переменным током.
6. Система электроснабжения (СЭС) постоянным током.
7. Система управления элеронами.
8. Система управления рулем направления.
9. Система управления рулем высоты.
10. Управление стабилизатором.
11. Управление закрылками.
12. Управление интерцепторами и тормозными щитками.
13. Управление предкрылками.
14. Шасси.
15. Система торможения.
16. Система кондиционирования воздуха (СКВ).
17. Система регулирования давления (СРД).
18. Кислородная система.
19. Противообледенительная система (ПОС) и остекления кабины.
20. Противопожарное оборудование.
21. Вычислительная система самолетовождения (ВСС).
22. Система электронной индикации (СЭИ).
23. Система сбора и локализации отказов (ССЛО).
24. Вычислительная система управления полетом (ВСУП).
25. Вычислительная система управления тягой (ВСУТ).
26. Автоматическая система улучшения устойчивости и управляемости (АСУУ).
27. Система воздушных сигналов (СВС).
28. Бесплатформенная инерциальная навигационная система (БИНС).
29. Система предупреждения критических режимов (СПКР).
30. Система предупреждения приближения земли (СППЗ).
31. Радиовысотомер (РВ).
32. Приборная система посадки (ПСП).
33. Автоматический радиокомпас (АРК).
34. Радиотехнические системы ближней навигации VOR и дальномерная система (DME).
35. Радиотехническая система ближней навигации (РСБН).
36. Радиотехническая система дальней навигации (РСДН).
37. Метеонавигационная радиолокационная станция (МНРЛС).
38. Самолетный ответчик.
39. Аппаратура опознавания.
40. Светотехническое оборудование.
41. Двери, люки.
42. Бытовое оборудование.
43. Радиосвязное оборудование.
44. Магнитная система регистрации параметров МСРП.
45. Аппаратура звукозаписи "МАРС".
Однако данная система помогает летчику только тогда, когда ЛА находится в пределах области эксплуатационных ограничений. Система не обеспечивает летчика информацией в критических ситуациях - за пределами эксплуатационных ограничений, не дает прогноза развития критической ситуации. Экипаж ЛА в критических ситуациях сталкивается с необходимостью решения трудных задач, требующих мгновенной реакции в управлении самолетом и принятия решения при переработке информации, часто выходящей за пределы человеческих возможностей. Однако, система КИСС не в состоянии обеспечить работу экипажа в этих условиях. Работа КИСС носит локальный характер и в критических ситуациях, когда происходит резкое повышение сложности решаемых задач, решения, рекомендуемые системой, характеризуются слабой интеллектуальностью и, как следствие, низкой степенью доверия к ним экипажа. Кроме того, если экипаж по тем или иным причинам не выполняет рекомендации системы контроля, то в критической ситуации необходим переход на автоматическое управление. Комплексное решение по выходу из критической ситуации и доведение этого решения до экипажа системами со встроенным контролем типа КИСС не представляется возможным.
Целью изобретения является создание управляющей экспертной системы - иерархической системы с параллельной оценкой работоспособности бортового оборудования ЛА, работы экипажа, прогнозирование аварийных ситуаций и своевременного информирования экипажа о возникших отклонениях от нормы в работе БО, условий полета и выработки рекомендаций вывода из опасных ситуаций - за пределом области эксплуатационных ограничений.
При возникновении опасной ситуации (ОС)
- оценивается экспертной системой класс и степень сложности опасной ситуации,
- прогнозируется поведение системы ЛА - БО,
- на основе БЗ, сформированной по результатам анализа и опыта исследования авиационных катастроф, ЭС выдает рекомендации и формирует решения по минимизации тяжести последствий, предотвращению перехода аварийной ситуации в катастрофическую,
- моделируется поведение экипажа по управлению ЛА по выводу из опасной ситуации,
- если экипаж по тем или иным причинам не выполняет решений и ЭС по выводу из опасной ситуации, то ЭС в исключительных случаях вмешивается в управление, приводит управление в автоматический режим - включает САУ.
Для решения указанной задачи в системе поддержки экипажа в опасных ситуациях (СПЭОС), включающей датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы штурвального управления (СШУ), системы выпуска шасси и торможения (СВШТ), системы жизнеобеспечения (СЖ), противообледенительной системы, противопожарной системы, системы автоматического управления (САУ), системы воздушных сигналов (СВС), системы самолетовождения (СС), бортовой части спутниковой навигационной системы (СНС), бесплатформенной инерциальной навигационной системы (БИНС), радиовысотомера (РВ), приборной системы посадки (ПСП), радиотехнической системы ближней навигации (РСБН), метеонавигационной радиолокационной станции (МРЛС), системы предупреждения критических режимов (СПКР), соединенных с мультиплексным каналом информационного обмена (МКИО), систему отображения информации (СОИ), введены база знаний (БЗ), база данных (БД), блок распознавания состояния конфигурации ЛА (БРСК), блок распознавания режимов полета (БРРП), анализатор состояния аппаратуры ЛА (АСА), блок распознавания аварийных ситуаций (БРАС), блок прогноза, состоящий из связанных блоков моделирования динамики ЛА - БО и БЗ развития аварийной ситуации (АС), связанных друг с другом БЗ характеристик АС и БЗ предотвращения АС, вычислитель принятия решений о предотвращении АС (ВПРП), анализатор правильности действий по предотвращению АС (АПДП), вычислитель принятия решений о переходе на автоматическое управление (ВПРПАУ), блок предупреждения о нарушении правильности действий (БПНПД), причем блок распознавания аварийных ситуаций соединен с первым, вторым, третьим и четвертым входами с выходом блока распознавания режима полета (БРРП), анализатора состояния ПНО, анализатора состояния аппаратуры (АСА) ЛА, входы которых соединены с МКИО, пятым и шестым входами соответственно соединены с БЗ характеристик АС и блоком развития прогноза АС, а выход блока распознавания АС связан со входом ВПРП АС, также связанным с БЗ предотвращения АС, а первый выход его связан с СОИ, второй выход - с анализатором правильности действий по предотвращению АС (АПДП), второй вход которого соединен с БЗ предотвращения АС, выход АПДП соединен с блоком предупреждения о нарушении правильности действий (БПНПД) экипажа, выход этого блока соединен со входом анализатора АПДП, второй выход БПНПД связан с СОИ, третий выход связан с вычислителем ВПРПАУ, второй вход ВПРПАУ соединен с БЗ предотвращения АС, а первый и второй выходы его соединены соответственно с СОИ и входом САУ, кроме того, блок моделирования динамики ЛА-БО соединен с МКИО.
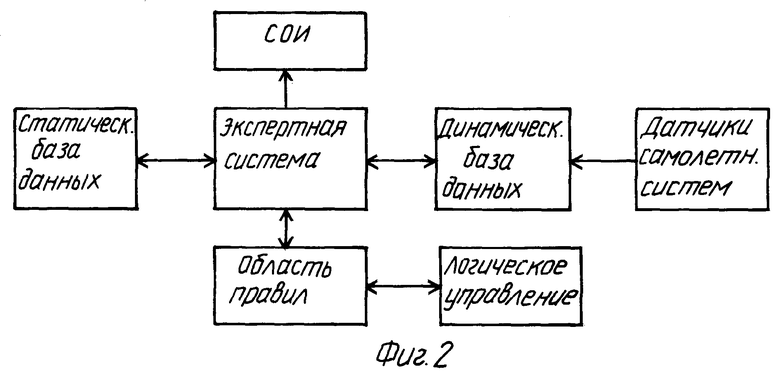
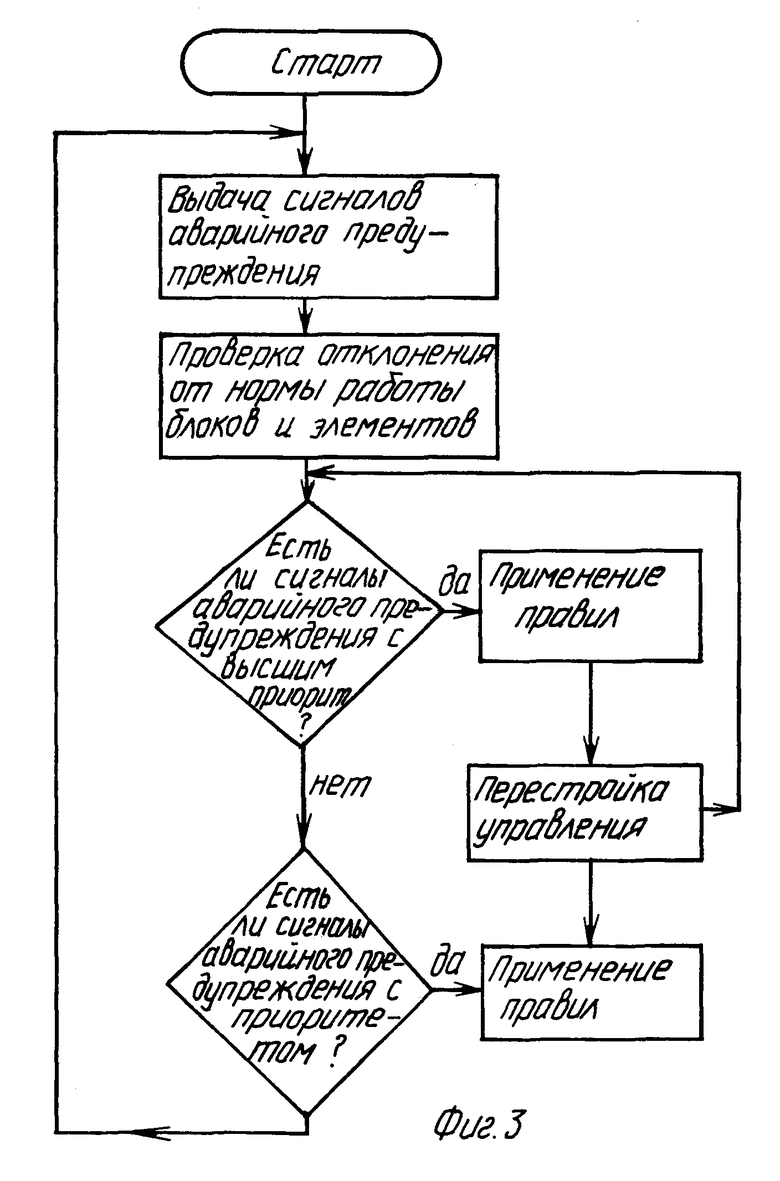
Сущность изобретения поясняется на фиг. 1, на которой изображена структурная схема системы поддержки экипажа в опасных и критических ситуациях, на фиг. 2 - структурная схема связи динамической и статистической БД, на фиг. 3 - алгоритм проверки отклонения от нормы работы частей и элементов.
1 - Двигатели.
2 - Топливная система.
3 - Гидросистема.
4 - Система электроснабжения.
5 - Система штурвального управления.
6 - Система выпуска шасси и торможения.
7 - Система жизнеобеспечения.
8 - Противообледенительная система.
9 - Противопожарная система.
10 - Система автоматического управления (САУ).
11 - Система воздушных сигналов (СВС).
12 - Система самолетовождения.
13 - Спутниковая навигационная система (СНС).
14 - Бесплатформенная инерциальная навигационная система (БИНС).
15 - Радиовысотомер (РВ).
16 - Приборная система посадки (ПСП).
17 - Радиотехническая система ближней навигации (РСБН).
18 - Метеонавигационная радиолокационная станция (МНРЛС).
19 - Система предупреждения критических режимов (СПКР).
20 - Мультиплексный канал информационного обмена (МКИО).
21 - Блок распознавания конфигурации (БРК).
22 - Блок распознавания режима полета (БРРП).
23 - Анализатор состояния пилотажно-навигационного оборудования (АС ПНО).
24 - Анализатор состояния аппаратуры БО (АСА БО).
25 - Блок распознавания аварийной ситуации (Б РАС).
26 - Блок прогноза.
27 - Блок моделирования динамики системы ЛА-БО.
28 - База знаний (БЗ) развития аварийной ситуации (АС).
29 - База знаний ЭС.
30-БЗ характеристик АС.
31-БЗ предотвращения АС.
32 - Вычислитель принятия решений о предотвращении АС (ВПРП).
33 - Анализатор правильности действий по предотвращению АС (АПДП).
34 - Система отображения информации (СОИ), включающая многофункциональный индикатор, сигнальный "огонь".
35 - Вычислитель принятия решений о переходе на автоматическое управление (ВПРПАУ).
36 - Блок предупреждения о нарушении правильности действий экипажа (БПНПД).
В системе поддержки экипажа в опасных ситуациях датчики 1 состояния двигателей, топливной системы 2, гидросистемы 3, системы электроснабжения 4, системы штурвального управления 5, системы выпуска шасси и торможения (СВШТ) 6, системы жизнеобеспечения (СЖО) 7, противообледенительной системы 8, противопожарной системы 9, САУ 10, СВС 11, системы самолетовождения 12 (СС), бортовой части СНС 13, БИНС 14, радиовысотомера (РВ) 15, приборной системы посадки (ПСП) 16, РСБН 17, МРЛС 18, СПКР 19 соединены с мультиплексным каналом 20 информационного обмена (МКИО). В блоке прогноза 26 блок 27 моделирования динамики ЛА и БО соединен с БЗ развития АС 28 в БЗ 29. БЗ характеристик АС 30 связана с БЗ 31 предотвращения АС. Блок распознавания АС 25 соединен первым, вторым, третьим и четвертым входами с выходом блока БРСК 21, блока БРРП 22, анализатора состояния 23 ПНО, анализатора АСА 24, входы которых соединены с МКИО 20, а пятым и шестым входами соответственно соединены с БЗ характеристик АС 30 и блоком 26 развития прогноза АС. Выход блока распознавания АС 25 связан с входом вычислителя 32 ВПРПАС, связанным с БЗ 31 предотвращения АС, а первый выход его связан с СОИ 34, второй вход его связан с анализатором АПДП 33. Второй вход анализатора 33 АПДП соединен с БЗ 31 предотвращения АС, а выход АПДП 33 соединен с блоком 36 БПНПД экипажа, выход блока БПНПД 36 соединен со входом анализатора 33 АПДП АС, второй выход блока БПНПД 36 связан с СОИ 34, третий выход его связан с вычислителем 35 ВПРПАУ. Второй вход вычислителя 35 ВПРПАУ соединен с БЗ 31 предотвращения АС, а первый и второй входы его соединены соответственно с СОИ 34 и выходом САУ 10. Блок моделирования динамики ЛА-БО соединены с МКИО 20.
Система работает следующим образом.
По своему назначению СПЭОС в нормальных условиях полета остается пассивной и наблюдает за состоянием ЛА, за режимами работы двигателей, работой БО и экипажа. При возникновении ОС ЭС также оценивает информацию о внешней и внутренней среде. Когда прогноз развития ОС показывает, что ЛА выходит за пределы эксплуатационных ограничений, на основе БЗ 29, сформированной по результатам анализа и опыта исследования авиационных катастроф отечественных самолетов с ГТР 1-3 классов с 1957 по 1996 г.г. и зарубежных самолетов подобного класса за период с 1988 по 1994 г.г. ЭС классифицирует данную ситуацию (АС) по тяжести возможных последствий, формирует решения и выдает рекомендации по минимизации неблагоприятных последствий. В ЭС в блоке 26 моделируется поведение системы ЛА-БО и выдается прогноз развития событий в полете - информация о возможном состоянии БО, работе двигателей и параметров, характеризующих поведение ЛА. Кроме того, в системе моделируется поведение экипажа по управлению ЛА и его систем по выводу из опасной ситуации. Если экипаж предпринимает правильные действия (в соответствии с руководством по летной эксплуатации ЛА), или действия в направлении развития указанной ситуации, то ЭС не вмешивается в управление ЛА, а лишь выдает на экран СОИ -34 рекомендации и подсказки экипажу по пилотированию ЛА. В случае отсутствия реакции экипажа (потеря сознания летчиком и др.) на рекомендованное решение по выводу из опасной ситуации действий, которые приводят к катастрофическим последствиям, ЭС в исключительных случаях формирует необходимые корректирующие и управляющие сигналы в САУ -10 по парированию опасной ситуации и стабилизации полета ЛА. ЭС обеспечивает оптимальный интерфейс экипаж - БО СОИ -34.
Отработка информации в БО ЛА характеризуется большими объемами циркулирующих разнотипных данных, активной динамикой их поступления, наличием неточных знаний и необходимостью принимать по ним оперативные решения.
На вход программы-конвертора поступают данные, считываемые с мультиплексного канала информационного обмена МКИО 20 и обрабатываемые по специальным алгоритмам комплексом программных средств. Программа-конвертор преобразует числовые данные о полете с помощью цепи блоков 21-24 во множество фактов предметной области. Сформированные таким образом факты поступают на вход ЭС 25. Обобщенное представление исходных данных содержит структуру с элементами "тип аппаратуры" "функциональный элемент", которые обозначают наименование объекта и его конструктивно-функциональных элементов.
В вычислителях АСПНО 23 и АСА 24 определяются действительные значения параметров движения ЛА и параметры состояния всего БО.
Если X - значение одного из параметров какой-либо оцениваемой характеристики ЛА и ΔX - погрешность системы или характеристики ЛА, то Xдейс. - действительное значение соответствующего параметра определяется
Xдейст. = X - ΔX (1)
Повышение точности формирования действительных значении пилотажно-навигационного оборудования (ПНО) 23 и БО 24 достигается использованием оптимальной комплексной обработки информации (КОИ) с реализацией фильтра Калмана [8,9]. Формирование действительных значений навигационных и пилотажных параметров ЛА (координаты местоположения, составляющие скорости, высоты, курса, путевого угла и др.) осуществляется путем исключения из соответствующих сигналов систем их погрешностей, полученных с помощью фильтра Калмана при использовании в качестве избыточной информации данных СНС, БИНС и др. В режиме динамического сглаживания оценок осуществляется контроль и восстановление сбоев информации, их синхронизация. Реализация фильтра Калмана защищена от вычислительной неустойчивости путем ограничения значений диагональных элементов ковариационной матрицы ( ε -механизация), контролем информации на входе фильтра. Для реализации фильтра Калмана используются обозначения: вектор состояния Xк+1 = Фк+1,к, Xк+qк, вектор измерения Zк = HкXк + rк, qк, rк - независимые шумы с нулевым средним, cov[q,k]=Пк, cov[r,k] = Rк, Фк+1,к - фундаментальная матрица, Hк - матрица измерений.
Алгоритм оценки вектора состояния между измерениями:
Xк/к-1 = Фк,к-1Xк-1/к-1 (2)
Алгоритмы оценки вектора состояния при измерениях
Xк/к = Xк/к-1 + Кк(Zк-HкXк/к-1)
Кк = Pк/к-1Hк(Hк Pк/к-1Hк+Rк)
Pк/к-1 = Фк,к-1Pк-1,к-1Фк,к-1+Qк
Pк,к = Pк,к-1-КкHкPк,к-1 (3)
Xк,к, Xк,к-1 - априорные и апостериорные оценки, где Pк - ковариационная матрица, Кк - весовая матрица.
Вычисление осуществляется методом квадратного корня P = SST, где S - верхние и нижние угольные квадратичные матрицы.
Блок 22 - распознавания режима полета построен на рекуррентном алгоритме решения системы неравенств - решающее правило опознавания образов по параметрам линейных координат и скоростей H, L, Z, Vx, Vy, Vz, углов и угловых скоростей θ, Ψ, γ, ωx, ωy, ωz, линейных перегрузок nx, ny, nz, отклонения органов управления δв, δэ, δн и сектора газа δруд и средств механизации 
В блоке 24 организована, фиг. 2, 3, для обнаружения и идентификации неисправностей в процессе эксплуатации ЛА общей схемы [12]. Используется поиск "наилучшего его варианта" среди возможных правил для эффективного опознавания и обработки нештатных ситуаций. Важное значение имеют средства ЭС, позволяющие обнаружить ухудшение и потерю рабочих характеристик. Система учитывает физическое и аналитическое резервирование.
В системе организована статическая база данных, в память которого занесен список всех подсистем и приборов по секциям в виде постоянной информации.
В динамической базе данных, области памяти, общедоступной всем модулям системы, вводятся показания - выходная информация всех подсистем и список отказавших приборов. (Тип "классной доски"). Если прибора нет в списке секции, то вводится его аналитический эквивалент датчика.
При отказах реализуются 10 правил для динамической БД:
1. Если отказ прибора или нарушение его связей, то перемена (в исправное состояние) невозможна.
2. Если прибор не исправен, то вводится его метка неисправности.
3. Если показания прибора и математического эквивалента (модели) отличаются, то произвести проверку по третьему эквиваленту. Если два из них совпадут, то третий прибор неисправен. Если получаются три разных показания, то применение правил невозможно.
4. Если поведение прибора и эквивалента отличаются, то ввести программную проверку - увеличение коэффициента усиления (х10 раз) и ввести смещение.
5. Если показание прибора ненормально, то проверить работу других приборов, расположенных в этом же месте (локально). Если это не так, то применить правило 6, если это не так, то применить правило 8.
6. Если при локальной проверке прибор дает ненормальные показания, а все другие - нормальные, то проверить связи среди последних. Если такие приборы выявлены, то применить правило 8, если нет, то - правило 7.
7. Если показания прибора ненормальны, а работа связанных приборов - нормальна, тогда прибор объявляется неисправным и выдается метка неисправности.
8. Если приборы, имеющие общую (одинаковую) характеристику, являются ненормально работающими, то все приборы объявляются ненормально работающими (неисправными).
9. Если пилот запрашивает о наличии метки аварийного предупреждения, то сравнить решение пульта с информацией, которой располагает ЭС.
10. Если метка аварийного предупреждения снята, то прибор возвращается в нормальное состояние.
ЭС осуществляет отработку информации от датчиков 1-19 систем со встроенным контролем, органов управления с целью анализа работоспособности БО в процессе полета, положение и изменение органов управления систем, текущего положения ЛА в пространстве и окружающей обстановке.
Непосредственное измерение с помощью специальных датчиков параметров положения приводного устройства или управляющих поверхностей несет в себе возможность отказа самих этих датчиков. Поэтому вычислительные алгоритмы обнаружения отказов способны распознать факт отказа либо измерительного датчика, либо элемента системы управления, не обнаруживаемого непосредственным путем.
Для этого законы управления адекватно изменяют характеристики систем управления (обычно ее коэффициенты обратной связи), в ответ на появившиеся изменения в динамике ЛА, - это стратегия адаптивного - "активного" управления. Система должна быть способна к выполнению конкретных значений нескольких или всех ее динамических параметров за практически допустимый интервал времени. В системе используются несколько средств для вычисления передаточных чисел (коэффициентов усиления) системы управления на основе наблюдаемых значений параметров. Серьезным ограничением для адаптивных методов является ограничение по времени, необходимому для адаптации. Для идентификации изменений состояния системы требуется время значительно большее, чем характеристическое время ее реакции на возмущающие воздействия.
Система реконфигурации блок 21 позволяет отказаться от чрезмерного дублирования аппаратуры и использовать методы функционального резервирования. Системы реконфигурации решают задачи самовосстановления систем при отказах, которые не могут быть скомпенсированы летчиком в аварийных ситуациях.
Реконфигурируемая система должна быть подобна исходной системе с точки зрения динамики. Если исходная система содержит большое число компонентов, то реконфигурируемая система, имеющая на один компонент меньше, должна быть подобна исходной системе.
В процедуре реконфигурации предусмотрена возможность быстрой реакции на отказ компонента системы, чтобы исключить вредное воздействие отказавшего компонента на систему. В случае отказа привода рулевого органа привод выключается и переводится орган управления в нейтральное положение. В системе имеется возможность быстрого устранения влияния отказавшего компонента.
Если отказавший датчик или привод линейно связан с остальными компонентами, то его выходной сигнал можно синтезировать из остальных сигналов и воздействий. Тогда систему можно реконфигурировать, чтобы она функционировала как до отказа. Модель системы рассматривается в виде Ax+Bu (4)
Ax+Bu (4)
y=Cx, (5)
где x - n-мерный вектор состояния;
u - m-мерный вектор управления,
y - r-мерный вектор измерений;
A, B, C- матрицы состояния, управления, измерения соответствующих размеров.
В случае отказа какого-либо i-го датчика управление (5) будет
yf=Cfx, (6)
где вектор yf получается из вектора y исключением i-го элемента.
Матрица Cf получается из матрицы C исключением i-ой строки. Условие, что выход отказавшего датчика линейно связан с выходами остальных датчиков записывается
C
где C
C
Если соотношение (7) имеет место, то ставится задача восстановления вектора y по оставшимся (r-1) измерениям yf. Обозначив этот вектор через  получаем
получаем
Вектор  имеет такую же функциональную связь с вектором x, как и исходный вектор
имеет такую же функциональную связь с вектором x, как и исходный вектор  Измерения
Измерения  используются в системе также, как и исходные измерения y. Однако, характеристики шумов у вектора y будут другие.
используются в системе также, как и исходные измерения y. Однако, характеристики шумов у вектора y будут другие.
Критерием реконфигурации управления в случае отказов рулевых органов является условие сопряжения процессов управления
где xf - вектор состояния в случае отказов исполнительных органов.
Уравнение состояния записывается в виде
где δ - - вектор отклонений исполнительных органов;
K - матрица эффективности органов управления.
Система (7) управляемая, а изменение матрицы B вследствие отказа исполнительных органов небольшое.
Из условия (9) записывается соотношение
BK=BfKf, (11)
где Bf, Kf - матрицы в условиях отказов.
Необходимо вычислить матрицу Kf таким образом, чтобы скорость изменения вектора состояния x, определяемая силами и моментами, после отказа оставалась прежней. Из условия (11) получаем
Kf = Bf +BK, (12)
где Bf + - псевдообратная матрица.
Тогда отклонение исполнительного органа в случае отказов будет:
δf = Bf+Bδ = Kδ, (13)
где K = Bf +B.
Соотношение (13) описывает работу устройства реконфигурации и используется для распределения управления по избыточным исполнительным органам.
Для учета ограничений используется нормирование вида:
где D-1 - обратная матрица для D,
D - диагональная матрица физических ограничений на отклонение исполнительных органов
D = diag{di}, i = 1 ... m.
Тогда
Для модели с регулятором к уравнениям (4) и (5) добавлены уравнения регулятора
z = Rz+ Ey + Fu
u = Gz + Hy (16)
Объединив векторы X и Z в расширенный вектор, получаем матрицу состояния
Отказ какого-либо i-го датчика отображается заменой матрицы C на Cf исключением i-ой строки. При реконфигурации системы для компенсации потерь датчика имеется возможность пересчитывать параметры регулятора, т.е. матрицы R, T, F, G, Н. Первое решение заключается в пересчете матриц H, E по соотношениям
Hr=HCCf + ,
Er = [EC+F(HC - HrCf)]Cf + ,
где индекс r означает реконфигурацию.
Пересчет матриц H, E имеет целью сделать левую часть означает матрицы Ac близкой к их значениям до отказа, правая часть матрицы Ас не изменяется при отказе. Таким образом, значение матрицы всей системы становится близким к первоначальному. Если в системе много датчиков, то потеря одного датчика не должна нанести значительный ущерб, если система остается наблюдаемой при остальных исправных датчиках.
При пересчете матриц H, E вычисляются собственные значения λi замкнутой системы. Если новые собственные значения оказываются приемлемыми в том смысле, что они достаточно близки к собственным значениям исходной системы, то реконфигурация считается выполненной. В противном случае осуществляется пересчет параметров регулятора для того, чтобы переместить собственные значения системы в заданное положение. Можно сохранить матрицы Hr,Er такими, какими они были выбраны на первом этапе синтеза, а затем настраивать собственные значения путем изменения матриц R, F, G.
Блок распознавания состояния конфигурации (БРСК)-21 ЛА-21 предполагает наличие управления конфигурацией (реконфигурацией) систем управления. Под реконфигурацией понимается изменение структуры и параметров органов управления ЛА в соответствии с программой полета. Необходимость в реконфигурации обусловлена изменением штатного режима функционирования подсистем, переходом с режима на режим.
Управление конфигурацией ЛА предполагает рассмотрение подсистем в качестве объектов управления. Предусматривается возможность изменения конфигурации при изменении штатных режимов. Для этого выбирается совокупность режимов полета R (взлет, набор высоты и т.д.) и для каждого синтезируется оптимальная конфигурация системы. Управление конфигурацией таким образом сводится к реализации отображения Ho:R _→ Ψ (19), где Ψ - конфигурация ЛА. При внезапных отказах в системе блок в условиях ограниченного времени оценивает ситуацию и осуществляет соответствующую перестройку системы оптимальным образом. Т.е. блок БРСК наделяется комплексом знаний о возможных ситуациях и умением делать правильные выводы о необходимых действиях по изменению конфигурации и последствиях.
БРСК-21, поддерживая реконфигурацию ЛА, должен решать такие задачи, как локализация отказов аппаратуры, анализ внешних и внутренних параметров системы, сопоставление характеристик полета с его программными значениями, принятие решений на вынужденное изменение программы полета, выбор конфигурации ЛА по программе полета и по результатам анализа ситуации.
Необходимость решения этих задач выдвигает требования включения в архитектуру БРСК-21 блока оценивания внешней и внутренней среды, интерпретатора ситуаций, планировщика конфигураций, базу моделей конфигураций ЛА. Функциональная роль интерпретатора заключается в интерпретации информации, поступающей от блоков оценивания внешней и внутренней среды (подсистем и датчиков) и подготовке сообщения экипажу, одновременно эта же информация передается планировщику, цель которого заключается в выборе оптимальной конфигурации системы в сложившейся обстановке [4,5].
Информация, поступающая на вход интерпретатора, рассматривается в виде текста Aвых, определяемого набором символов <a1, а2 ... an>. Здесь каждый символ соответствует определенному параметру ai значение которого может меняться в зависимости от режимов работы подсистем. На выходе интерпретатора получается текст Aвых характеризующий полетную ситуацию. На основе информации, содержащейся в тексте Aвых, планировщик вырабатывает команду KП на реконфигурацию системы. Используя теорию ситуационного управления, планировщик ставит в соответствие входному тексту Aвых некоторую обобщенную ситуацию X, которой соответствует некоторая конфигурация Ψn, информация о которой хранится в базе моделей конфигураций  где X, Ω, W - множество параметров состояния соответственно ЛА, САУ и внешней среды.
где X, Ω, W - множество параметров состояния соответственно ЛА, САУ и внешней среды.
Образ полетной ситуации в текущий момент времени интерпретатор представляет в виде:
где μai - - функция принадлежности в смысле Заде, определяющая понятие из множества соответствующей переменной;
P - вектор предикатов размерности (k+m+n).
Для выполнения программы полета образ полетной ситуации (21) должен определять критерий D т.е.
т.е.

D
D
Введение в контур управления систем с БЗ-28-29, 30, 31, основывающихся на качественном описании ЛА, позволяет повысить эффективность и безопасность системы управления в целом, поднять уровень автоматизации процессов, а также снизить нагрузку на экипаж.
Задачи, которые возлагаются на БЗ-28-29, 30, 31, разбиты на группы:
анализ состояния объекта управления с целью раннего обнаружения нарушений в процессах либо оборудования и оперативного предотвращения развития данных нарушений до срабатывания аварийных систем защиты;
анализ событий на объекте управления с целью оперативного выявления первопричин АС;
качественный прогноз развития процессов во времени, распространение возмущений по подсистемам с целью определения запаса до зоны риска и выработки эффективных воздействий на ЛА, не производимых САУ;
формирование рекомендаций экипажу, либо непосредственно управляющих воздействий на ЛА.
Решение данного комплекса задач позволяет внести в систему управления следующие дополнительные качества:
выявлять, локализовать и предотвращать в ручном и автоматическом режиме развитие аварийных ситуаций;
оперативно выявлять первопричины возмущений (исходных событий, повлекших за собой цепь событий);
оценивать правильность реакции САУ на текущую ситуацию, предотвращать неправильные воздействия экипажа на ЛА и предсказывать (инициализировать) эффективные воздействия, не производимые САУ.
БЗ в системе организованы по принципу "правило-цель", т.е. каждой цели, обусловленной возникновением АС и условиями полета, соответствует набор возможных стратегий летчика по устранению или локализации этих ситуаций [14].
Управляемые данными правила вида "условие-действие" активизируются изменениями в состоянии БЗ. Корректирующие действия определяются скрытыми целями, которые в обычной обстановке пассивны и активизируются, когда возникает одна или более аварий.
Реальные возможности ЭС определяются качеством БЗ-28-29,31. В БЗ входят знания о предметной области управления ЛА в критических ситуациях, собранные в научно-технической литературе, инструкциях и руководствах по эксплуатации БО, САУ и ЛА, а также при консультациях с экспертами, на опыте и анализе всех зафиксированных катастроф и авиационных происшествий за период ≈40 лет.
Аварийная или катастрофическая ситуация АС характеризуется вектором признаков x={x1, x2,..., xk}.
Схема отношения реляционной БЗ-29-31 БД характеристик катастрофической ситуации (КС) следующая:
R<S,P,K0,R,Kr,D,Kd,V> (24),
здесь обозначены атрибуты:
S - наименование классов КС;
P - возможные неблагоприятные последствия катастрофических ситуаций;
K0- коэффициент опасности последствий;
R - причины возникновения катастрофических ситуаций;
Kr-коэффициенты уверенности в причинах r (r=1...q);
X - признаки катастрофических ситуаций;
Kx - коэффициенты информативности признаков Xj (j=1...k) для распознавания классов катастрофических ситуаций Si (i=1...m);
D - управляющие решения;
Kd - коэффициенты уверенности в правильности решений d;
V - управляющие воздействия.
Кортежи a1, a2, ... , ag отношения R (A1, ... , Ag) БД, содержащей характеристики КС, представляют собой примеры конкретных реализаций КС, полученные из объективных описаний реальных КС, имевших место в полетных ситуациях и из опыта экспертов.
Моделью представления знаний об управлении системами ЛА в критических ситуациях является продукционная модель, позволяющая наиболее наглядно и удобно представлять правила распознавания ситуаций и принятия решений. Правила распознавания КС в такой модели выглядят следующим образом.
Это класс (Si), если есть признак X11i с коэффициентом Kx(X11i) и есть признак X21i с коэффициентом Kx(X21i)
...... (25)
и есть признак Xkqi с коэффициентом Kx(Xkqi)
Здесь i=1 ... m;
x,r,j,i - значение признака xr ∈ X для прототипа j класса КСi;
r=1 ... k;
qi - количество эталонных признаков класса, соответствующих определенной причине каждая аксиома БЗ соответствует описанию эталона соответствующего класса КС.
В качестве критерия распознавания классов КС в управляющей системе используется степень близости распознаваемой ситуации, представленной вектором X к эталонным описаниям наборов АС и КС для конкретного типа ЛА.
В ЭС в блоке БРАС-25 используется логический метод принятия решений, основанный на полноте БЗ ЭС, содержащей формализованный опыт специалистов, определяющий способность системы квалифицированно принимать решения. Поэтому процедура распознавания образов позволяет анализировать для этого хранящийся в БЗ опыт принятия решений специалистами.
Задача технической диагностики состоит в классификации объекта к одной из известных ситуаций (исправен ЛА, САУ или нет), что укладывается в рамки распознавания образов. Несмотря на бесконечное разнообразие конкретных проявлений критических ситуаций, существует конечное множество решений по управлению выводом сложной системы из критической ситуации, определяемое ограниченными ресурсами управляющей части системы. Это достигается путем разбиения множества возможных критических ситуаций на классы, каждому из которых соответствует определенное управляющее решение. Критические ситуации характеризуются вектором признаков X.
Задача распознавания образов состоит в целесообразности разбиения какого-либо множества объектов на классы, причем в каждый класс входят объекты близкие друг к другу с точки зрения определенного критерия. Если заданы два конечных множества A и B представителей соответственно первого и второго рода (образа), то для решения задачи распознавания образов строится решающее правило (на основе информации, заключенных в множествах A и В-БЗ), согласно которому, всякий новый объект, подлежащий диагностике, будет отнесен либо к первому, либо ко второму образу.
Распознавание образов реализуется следующим образом. Если на какой-то стадии принятия решения при выборе из двух альтернативных гипотез оказалось, что решение принимается с необходимым запасом надежности, то блок распознавания образов 25 находит в БД примеры аналогичных ситуаций с известными решениями, находит решающее правило, разделяющее ситуации, соответствующие первой гипотезе от ситуаций, соответствующих второй гипотезе и определяет для конкретной ситуации, подлежащий диагностике, какая гипотеза для нее реализуется. Т.е. в блоке БРАС-25 в алгоритмическом виде дано множество P=P1, . . . , PL независимых свойств объекта, M-признаков, характеризующих объект с различных сторон исследования, множество Qm=Qm1 ... Qmn возможных значений m признака; A=Q1 ... Qm - множество возможных состояний объекта исследования, при этом состояние ai ∈ A, характеризуется вектором ai=ai1 ... aim.
На основе знаний эксперта для каждого состояния из A идентифицируются наличие соответствующих свойств из множества P и тем самым строится классификация множеств  такую, что состояние ai ∈ A относится к классу, если объект в этом i=0 состоянии обладает, по мнению эксперта, свойством PL, к классу К0 - не обладает ни одним из рассмотренных свойств.
такую, что состояние ai ∈ A относится к классу, если объект в этом i=0 состоянии обладает, по мнению эксперта, свойством PL, к классу К0 - не обладает ни одним из рассмотренных свойств.
Система логического управления позволяет автоматизировать процесс принятия решений на основе работы со знаниями об объекте управления, включая реализацию элементов прогнозирования и логического вывода.
Формальная модель "интеллектуальной" системы логического управления включает как процедурное описание - модель функционирования, так и декларативное описание - модель знаний об объекте.
Процесс принятия решений в блоке ВПРП-32 основывается на вычислении статистических данных полученных результатов измерений и последующего принятия решений путем анализа этих статистических данных - метод проверки гипотез. Способом принятия решений является формирование из полученных результатов измерений скользящего среднего и его последующее сравнение с установленным порогом.
Наличие высокодинамической окружающей среды требует организации функционирования ЭС в реальном масштабе времени. При этом для обнаружения и прогноза неисправностей в блоке прогноза 26 применен подход, в основу которого положен принцип внутреннего моделирования текущих параметров полета и увязывания их в единое целое. Использование внутренних моделей параметров поведения ЛА и ВО позволяет диагностировать совмещенные ошибки и неисправности аппаратуры.
Важнейшим требованием, предъявляемым к модели ЛА-САУ, является точность отражения происходящих в действительности процессов.
Однако с усложнением конструкции самих объектов, а также задач управления, получаемые уравнения движения настолько сложны и громоздки, что их анализ оказывается затруднительным даже с помощью ЭВМ. Если уравнения не приведены к простейшему виду, то возникают сложности в связи с ограничениями памяти ЭВМ и большим временем счета.
Обобщенная модель ЛА-объекта Г состоит из твердого недеформируемого тела R и N консольно присоединенных к нему упругих элементов εi (i= 1 ... N). Уравнения движения деформируемого объекта представляются в виде

где ωc и Θ - - векторы поступательного и углового перемещения R;
m и I - масса и матрица центральных моментов инерции Г;
δn - - вектор координат деформаций элементов εn;
F(t) - сила (управления или возмущения), вызывающая поступательное движение Г;
G(t) - момент, вызывающий вращение Г;
Qn- вектор модальных координат элемента;
Mn и Kn - матрицы масс и жесткости элементов;
Dn - матрица демпфирования;
γnδ - - модальные возмущения, определяемые соотношением:
γnδi(t) = ∫U
где Uj(r)-j - форма собственных колебаний;
fe(r,t) - внешняя сила в точке r;
где Pnδ и Hnδ - - векторы, определяющие связь степеней свободы твердого тела (ωc и Θ) со степенями свободы упругих элементов (δ1...δn).
Уравнение (26) описывает поступательное движение Г под действием F(t), (27) - вращательное - под действием G(t).Уравнение (28) - определяет перемещения δn, вызванные движением R(ωc,Θ) действием сил и моментов по εn, представленного в виде модальных возбуждений.
Из свойств матриц Mn и Kn следует, что
T
где ENn - единичная матрица размером (NnxNn);
Ωn = diag{Ωn...ΩnN1} - . .. матрица, содержащая собственные частоты колебаний элемента εn; δn(t) = TnQn(t) (31)
Pn = T
Модель движения ЛА является упрощенной, если модальный индекс полноты элемента Sn=1.
Sn = ρ[J
где ρ - спектральная норма (оператор);
n - наибольшее из действительных собственных чисел ρ < 1;
Jn - второй момент инерции εn; 
При Sn= 1 система является полной, при этом исключены те гармоники, которые несущественно влияют на изменение значения Sn. При этом высокочастотные колебания с частотами, превышающими полосу пропускания системы управления исключены.
Управляющая ЭС предоставляет экипажу следующие возможности:
осуществлять формирование совета летчику, управляющему ЛА-САУ по принятию управляющих решений;
составлять инструкции и рекомендации по управлению объектом в критических ситуациях;
разработанные алгоритмы распознавания и принятия решений в КС используются для автоматического управления выводом системы ЛА-САУ из КС при малом резерве времени;
проводить тренировки экипажей по управлению ЛА в условиях возникновения КС.
Катастрофические ситуации (КС) или аварийные ситуации (АС) в человеко-машинных системах требуют принятия согласованных управленческих решений в условиях неопределенности и ограниченного резерва времени. При решении этих задач человек (экипаж) играет роль наблюдателя, инспектора резервной цепи, управляющего, а управляемая экспертная система - роль гида, репортера, инструктора, референта. Роли закладываются в сценарии взаимодействия, варианты которых разрабатываются для характерных интервалов резерва времени. Для задания сценариев взаимодействия удобно пользоваться моделями иерархического процесса [6].
Существенным фактором АС является неопределенность момента возникновения и определяющих ее параметров. В этих условиях располагаемый резерв времени может быть использован для уменьшения неопределенности и принятия более обоснованного решения. Важно использование резерва времени для организации целенаправленной деятельности человека по выходу из АС, в частности, по согласованию вариантов решений бортовой ЭС и человека. Располагаемый резерв времени влияет на выбор стратегии анализа ситуации, обуславливает возможность многошагового диалога с ЭВМ при согласовании решений и др.. При этом должно обеспечиваться условие, что ЭС способна обеспечить обнаружение признаков нарушений и выдвижение гипотез относительно АС; определение вариантов решений по выходу из АС, оценку ее эффективности; оценку располагаемого в АС резерва времени.
Сценарии взаимодействия задают структуру обмена сообщениями участников и отражают основные функции управления в АС:
обнаружение и анализ нарушений;
принятие решений и переход на аварийную программу;
контроль исполнения программы управления;
контроль эффективности программы.
Сценарии предусматривают диалоговые фрагменты разрешения конфликтов принятия решений при переходе на аварийную программу и контроле ее исполнения (контроль ошибочных действий).
ЛА является объектом управления - наблюдаемый во времени Т[0, t] или t[t, T] процесс Y(t), описывающий функционирование системы, Y(t) - наблюдаемые изменения таких величин как высота, скорость полета, углы тангажа, крена, рыскания или перекладки штурвала, рулей и других величин.
Y(t) порождается системой S со структурами организации ее элементов Si, которые в совокупности при взаимодействии определяют ее качество или свойство. Необходимо задать такую структуру Q из этих элементов Si, при которой управляющие воздействия U(t) на процесс Y(t) обеспечили бы более высокий уровень безопасности полетов.
Y(t) вектор показателей, характеризующих деятельность летчика, как функция управляющих воздействий U(t):
где t0=0 начальный момент времени;
T - период наблюдения;
rk - факторы типа возмущений или ошибка управления и неопределенности информации, влияющей как на Y(t) и на u(t);
fi= Q - алгоритм или технология воздействия на систему "экипаж-ВС" при пилотировании - это алгоритм управления ЛА в заданном полете. В данной ситуации формируются алгоритмы управления f1 и самоуправление на основе обратных связей, которые вводятся на основе БЗ ЭС и на основе контроля текущего состояния с помощью бортовых датчиков.
Для рассматриваемой системы (34), качество которой определяется структурой Q и алгоритмом, вводится критерий качества U, характеризующий меру совершенства внутренней организации ее элементов {Si}=Q
где E - функционал;
С* - достижимый уровень;
extr - экстремум критерия качества U=C*.
В качестве U использован показатель безопасности полета в виде нормированной частоты неблагоприятных событий по отношению к общему числу вылетов ЛА.
Увеличение безопасности из (35) возможно за счет оптимизации Q и f1 - управление летной деятельностью.
Блок-36 - блок предупреждения о нарушении правильности действий экипажа построен на основе определения системы неравенств и сравнений. Блок-36 (БПНПД) включает в себя как последовательную проверку отношений вероятностей, так и проверку обобщенного отношения правдоподобия. Составление отношения при пошаговом изменении состояния системы, основываясь на анализе результатов измерений или используя принцип Калмановской фильтрации.
СОИ -34 в виде многофункционального индикатора предназначена для отображения визуальной информации в виде текстов, шкал, мнемосхем.
ЭС выдает на дисплей СОИ-34 предупреждающую информацию при появлении отклонения от нормального режима полета, сигналы звуковой и аварийной сигнализации, и выдачу командных сигналов на СОИ-34 экипажу о необходимых действиях в АС (отсутствие резерва дублирующих систем, перенацеливание посадки и др.).
ЭС формирует и выдает в САУ-10 и БО управляющие и корректирующие сигналы при отсутствии реакции экипажа на АС (пожар, разгерметизация, экипаж не работоспособен и др.).
ЭС выдает справочную информацию по запросу экипажа на дисплее СОИ-34.
Для выдачи важной для управления информации на экране индикатора-дисплея-34 используется "окно предупреждения" и "информационное окно" с дублированием информации голосом, центральным сигнальным огнем.
Блок-34 включает в себя для обеспечения человеко-машинного интерфейса в системе на языке описания сценариев диалога, а также диалоговый интерпретатор, планировщик параметризации и генератор организаторов диалога, что обеспечивает гибкую перенастройку диалога и управления процессами управления во всех режимах функционирования.
Описание комплекса бортового оборудования БО и отдельных систем приведено в источниках [11, 13, 14, 15].
Использование ЭС с вышеперечисленным перечнем решаемых задач позволяет обеспечить информацией экипаж и уменьшить риск катастроф.
Испытания системы состоят в прогонке ее через возможные ситуации.
При испытаниях ЭС должны быть решены две задачи [7].
1. Проверка работы ЭС во всех опасных ситуациях, составляющих БД аварийных ситуаций, для которых предназначена система.
2. Проверка работы ЭС в нормальных условиях полета и аварийных ситуациях, не принадлежащих БД, для оценки возможности дезинформации экипажа со стороны ЭС.
Литература
1. Минкова С.П. Экспертная система "Экспро-пилот" для управления качеством летной деятельности. Вычислительная техника. Системы управления, выпуск 2, Москва-София, 1990, Институт информатики, комплексной информатизации и систем.
2. Ильясов Б.Г., Парфенов Н.И., Черняховская Л.Р. Автоматизация принятия решений при управлении системами "Человек-техника" с помощью экспертных систем. Эргономика в России, СНГ и мире: Опыт и перспективы. Международная конференция. С-Петербург, Россия 21-24 июня 1993.
3. Руководство по летной эксплуатации Ил-96, раздел 8.21. Системы сигнализации и информации, 30/10-1987.
4. Уколов И.С. и др. Проблемы интеграции комплекса управления ЛА на базе БЦВС. Вопросы кибернетики. Система и методы управления движущимися объектами. М., 1984.
5. Акаев А.., Васильев В.А. и др. Координация подсистем базового комплекса управления. Вопросы кибернетики. Управление движущими объектами. М., 1985.
6. Хейес-Рат Ф., Уотерман Д., Ленат Д. Построение экспертных систем. М. Мир, 1987.
7. Попов Э.В. Экспертные системы. М. Наука. 1987, 288 с.
8. Помыкаев Н.И., Селезнев В.П., Дмитриченко Л.А. Навигационные приборы и системы. М.: Машиностроение. 1983.
9. Бабич О.А. Обработка информации в навигационных комплексах. М.: Машиностроение. 1991.
10. Белогородский С.Л. Автоматизация управления посадкой. М.: Транспорт, 1972.
11. Анодина Т.Г., Володин С.В. и др. Управление воздушным движением. М.: Транспорт, 1988.
12. Huang C.Y. A Lisp-based Expert system for detecting failures in aircraft systems. Princeton. Princeton University, 1984, p. 55.
13. Евреинов Э.В., Бутыльский Ю.Т., Мамзелев И.А. и др. Цифровая вычислительная техника. М.: Радио и связь. 1991, 403 с., с. 303.
14. Калиниченко Л.А., Рывкин В.М. Машины без данных и знаний. М.: Наука. Главная редакция физико-математической литературы. 1990, 296 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПИЛОТАЖНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2004 |
|
RU2263973C1 |
| СИСТЕМА ЗАЩИТЫ САМОЛЕТА ОТ ОШИБОЧНЫХ ИЛИ УМЫШЛЕННЫХ ДЕЙСТВИЙ, ПРИВОДЯЩИХ К КАТАСТРОФЕ | 2001 |
|
RU2228885C2 |
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ЭКИПАЖА ВОЗДУШНОГО СУДНА ПО ПРЕДОТВРАЩЕНИЮ ОСОБЫХ СИТУАЦИЙ | 2008 |
|
RU2386569C2 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЯ ПО ПРОВЕДЕНИЮ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В ОГРАНИЧЕННОЕ ВРЕМЯ | 2019 |
|
RU2728946C1 |
| ТРЕНАЖЕР | 1992 |
|
RU2037209C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2388663C1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
Изобретение относится к авиационной технике, в частности к системам управления и диагностики бортового оборудования, и предназначено для установки на гражданские летательные аппараты (ЛА). Экспертная система поддержки экипажа в опасных ситуациях содержит датчик состояния двигателей, топливной системы, гидросистему, систему электроснабжения, систему штурвального управления, систему выпуска шасси и торможения, систему жизнеобеспечения, противообледенительную систему, противопожарную систему, блок распознавания состояния конфигурации ЛА, блок распознавания режимов полета, анализатор состояния пилотажно-навигационного оборудования, анализатор состояния аппаратуры ЛА, блок распознования аварийной ситуации, блок прогноза, состоящий из связанных блоков моделирования динамики ЛА-БО и БЗ развития АС, связанных друг с другом БЗ характеристик АС и БЗ предотвращения АС, вычислитель принятия решений о предотвращении АС, анализатор правильности действий по предотвращению АС, вычислитель принятия решений о переходе на автоматическое управление, блок предупреждения о нарушении правильности действий. 3 ил.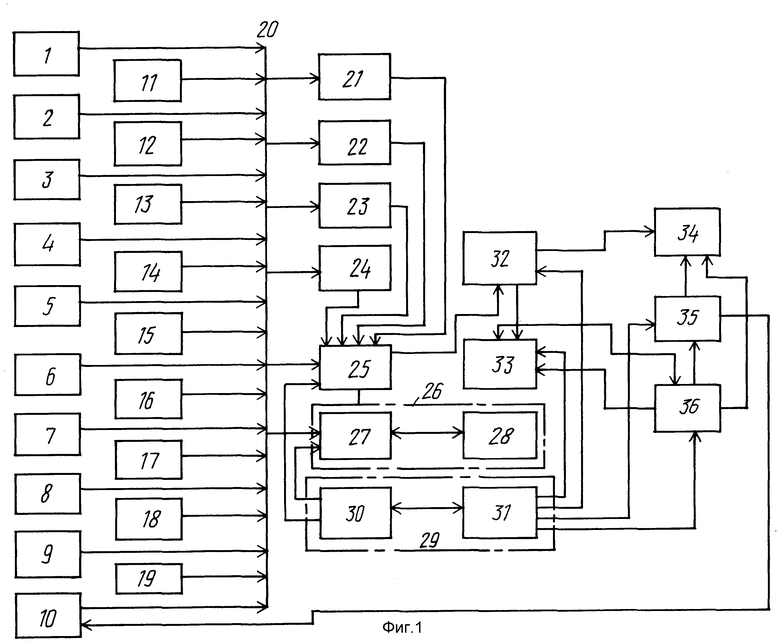
Система поддержки экипажа в опасных ситуациях при выходе из эксплуатационной области, включающая датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы штурвального управления (СШУ), системы выпуска шасси и торможения (СВШТ), системы жизнеобеспечения (СЖ), противообледенительной системы, противопожарной системы, системы автоматического управления (САУ), системы воздушных сигналов (СВС), системы самолетовождения (СС), бортовой части спутниковой навигационной системы (СНС), бесплатформенной инерциальной навигационной системы (БИНС), радиовысотомера (РВ), приборной системы посадки (ПСП), радиотехнической системы ближней навигации (РСБН), метеонавигационной радиолокационной станции (МЛРС), системы предупреждения критических режимов (СПКР), соединенных с мультиплексным каналом информационного обмена (МКТО), систему отображения информации (СОИ), отличающаяся тем, что в нее введены база знаний (БЗ), база данных (БД), блок распознавания состояния конфигурации ЛА (БРСК), блок распознавания режимов полета (БРРП), анализатор состояния пилотажно-навигационного оборудования (АСПНО), анализатор состояния аппаратуры ЛА (АСА), блок распознавания аварийных ситуаций (БРАС), блок прогноза, состоящий из связанных блоков моделирования динамики ЛА-бортового оборудования (БО) и БЗ развития аварийных ситуаций (АС), связанных друг с другом БЗ характеристик АС и БЗ предотвращения АС, вычислитель принятия решений о предотвращения АС (ВПРП), анализатор правильности действий по предотвращению АС (АПДП), вычислитель принятия решений о переходе на автоматическое управление (ВПРПАУ), блок предупреждения о нарушении правильности действий (БПНПД), причем блок распознавания АС соединен первым, вторым, третьим, четвертым входами с выходами блока распознавания состояния конфигурации ЛА (БРСК), блока распознавания режима полета (БРРП), анализатора состояния ПНО анализатора состояния аппаратуры (АСА), ЛА, входы которых соединены с МКИО, пятым и шестым входами соответственно соединены с БЗ характеристик АС и блоком развития прогноза АС, и выход блока распознавания АС связан с входом ВПРП, также связанным с БЗ предотвращения АС, а первый выход его связан с СОИ, второй выход - с анализатором правильности действий по предотвращению АС (АПДП), второй вход которого соединен с БЗ предотвращения АС, выход АПДП соединен с блоком предупреждения о нарушения правильности действия (БПНПД) экипажа, выход этого блока соединен со входом анализатора АПДП, второй выход БПНПД связан с СОИ, третий выход связан с вычислителем ВПРПАУ, второй вход вычислителя ВПРПАУ соединен с БЗ предотвращения АС, а первый и второй выходы его соединены соответственно с СОИ и входом САУ, кроме того, блок моделирования динамики ЛА-БО соединен с МКИО.
| Минкова С.П | |||
| Экспертная система "Экспро-пилот для управления качеством летной деятельности" | |||
| Вычислительная техника | |||
| Системы управления, вып.2 | |||
| - Москва-София, 1990, Институт информатики, Комплексной информатизации и систем." Руководство по летной эксплуатации ИЛ-96, раздел 8.21 | |||
| Системы сигнализации и информации, 30/10, 1987. |

