Ссылка на связанные заявки
Настоящая заявка является частично продолженной заявкой заявки на патент США № 10/607552, поданной 26 июня 2003, и частично продолженной заявкой заявки на патент США № 10/301552, поданной 21 ноября 2002 (ныне патент US 6703964), который является продолжением заявки на патент США № 09/810054, поданной 16 марта 2001 (ныне патент US 6507309). Настоящая заявка испрашивает приоритет заявок 10/697965 и 10/697848, поданных 30 октября 2003 г. Упомянутые выше патенты и патентные заявки тем самым включены в настоящее описание полностью по ссылке.
Права правительства
Это изобретение было сделано при поддержке правительства согласно Контракту номер DE-AC0676RLО1830, предоставленным Министерством энергетики США. Правительство имеет некоторые права в изобретении.
Уровень техники
Настоящее изобретение относится к способам сканирования/отображения электромагнитного излучения и более конкретно, но не исключительно относится к обнаружению скрытых объектов, которые человек носит под одеждой.
Обнаружение оружия, контрабанды и других скрытых объектов представляет существенный интерес в пунктах проверки безопасности и т.п. Один подход использует магнитометр для обнаружения некоторых металлических объектов. К сожалению, этот подход не обнаруживает большинство органических полимерных и композиционных материалов, которые могут использоваться для изготовления огнестрельного оружия, взрывчатых веществ и других объектов, которые могут представлять угрозу безопасности.
В другом подходе может применяться электромагнитное излучение в выбранном диапазоне волн, чтобы обеспечить изображения, которые могут выявить объекты, скрытые одеждой. Однако этот подход обычно встречается с ограничениями относительно скорости досмотра и/или разрешающей способности изображения, которая сделала его нежелательным для некоторых применений - например, некоторых массовых транзитных контрольных пунктов. Кроме того, так как эти системы могут обеспечивать детальные изображения частей тела, которые обычно предназначаются, чтобы быть скрытыми одеждой, использование инспектора-человека может вызвать смущение у осматриваемого человека и может вызвать беспокойство в том, что нарушаются права на личную тайну. Таким образом, имеется постоянный спрос на дальнейшие поиски в этой области технологии.
Сущность изобретения
Один вариант осуществления настоящего изобретения представляет уникальную методику для обнаружения объектов. Другие варианты осуществления включают в себя уникальные системы, устройства, способы и аппаратуру для определения, скрывает ли человек объект.
Дополнительный вариант осуществления настоящего изобретения представляет способ, который включает в себя обнаружение возвращаемого электромагнитного излучения, имеющего одну или более частот в диапазоне приблизительно от 200 Мегагерц (МГц) до приблизительно 1 Терагерц (ТГц), от поверхности под одеждой человека, установление данных исходя из возвращаемого электромагнитного излучения, соответствующих интенсивности и глубине вдоль поверхности, и адаптивную обработку данных, чтобы определить, несет ли человек подозрительный объект.
Другой вариант осуществления настоящего изобретения посвящен способу, который включает в себя облучение области досмотра, включающей в себя человека, несущего скрытый объект, обнаружение электромагнитного излучения, возвращаемого от этой области в ответ на облучение, установление данных, представляющих карту интенсивности электромагнитного излучения, возвращаемого вдоль области досмотра, и карту глубины вдоль области досмотра, и ввод данных в нейронную сеть для обнаружения скрытого объекта на основании карт интенсивности и глубины.
Еще один вариант осуществления настоящего изобретения включает в себя способ для обнаружения электромагнитного излучения, возвращаемого от предмета, где электромагнитное излучение включает в себя одну или более частот в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц. Данные являются установленными, что соответствует интенсивности электромагнитного излучения, возвращаемого от предмета, и разности глубин вдоль одной или более поверхностей предмета. Адаптивную обработку выполняют с данными, чтобы определить, присутствует ли искусственный (сделанный человеком) объект, подозреваемый в качестве по меньшей мере одного из контрабанды или потенциальной угрозы безопасности, как функцию интенсивности и разности глубин. В одном варианте объектом, проходящим досмотр, является человек, и способ выполняется для обнаружения подозрительных объектов, которые могут быть скрыты под одеждой человека. Адаптивная обработка может быть выполнена нейронной сетью, которая оценивает каждую из нескольких частей многопиксельного изображения. Для каждого из первого набора входов в нейронную сеть интенсивность пикселя изображения принимают в соответствии с пикселями изображения для соответствующей одной из частей изображения и для каждого второго набора входов в нейронную сеть, входные данные с пикселями разности глубин принимают в соответствии с пикселями изображения для соответствующей одной из частей изображения.
Дополнительный вариант осуществления настоящего изобретения включает в себя решетку, предназначенную для досмотра человека с помощью электромагнитного излучения на одной или более частот в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц, и подсистему обработки. Эта подсистема подсоединена к решетке и работает так, чтобы определить нейронную сеть, включающую в себя первый набор входов и второй набор входов. Первый набор входов принимает данные, соответствующие карте интенсивности возвращаемого электромагнитного излучения вдоль поверхности под одеждой человека, проходящего досмотр. Второй набор входов принимает другие данные, соответствующие карте глубины поверхности. Нейронная сеть оценивает, скрывается ли человеком один или более объектов, подозреваемых в качестве являющихся по меньшей мере одним из контрабанды и потенциальной угрозы безопасности, и обеспечивает одни или более соответствующих выходных данных. Эта оценка выполняется как функция карты интенсивности и карты глубины.
Еще один дополнительный вариант осуществления включает в себя устройство, имеющее логику, выполняемую одним или более процессорами для анализа данных, соответствующих изображению человека, полученного из электромагнитного излучения, включающего в себя одну или более частот в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц. Эти данные представляют карту интенсивности электромагнитного излучения и карту глубины, определенную в отношении человека. Логика функционирует так, чтобы выполнить адаптивную обработку данных, чтобы оценить, скрывается ли человеком один или более объектов подозрительной природы, как функцию карты интенсивности электромагнитного излучения и карты глубины. В одном варианте устройство включает в себя считываемую процессором память и логика присутствует в форме множества команд, сохраненных в памяти. В другом варианте устройство включает в себя одну или более частей компьютерной сети и логика закодирована в одном или более сигналов для передачи по этой сети.
Дополнительный вариант осуществления настоящего изобретения включает в себя способ сканирования человека электромагнитным излучением и определения, несет ли человек объект. Это определение может быть сделано посредством оценки данных изображения от сканирования, которое может включать в себя осмотр одного или более соответствующих изображений оператором. В одном варианте оператор просматривает одно или более поперечных сечений человека, взятых по высоте человека, чтобы минимизировать заботы о секретности, которые могли бы явиться результатом отображения особенностей тела, которые обычно скрываются от публики.
В другом варианте осуществления человека облучают электромагнитным излучением в пределах частотного диапазона приблизительно от 200 Мегагерц (МГц) до приблизительно 1 Терагерц (ТГц). Данные, представляющие изображение человека, устанавливают исходя из излучения и обеспечивают соответствующие данные изображения. В одном варианте облучение выполняют парой решеток, где каждая следует по траектории, которая оборачивается вокруг человека. В одном специфическом выполнении этого варианта каждая решетка обеспечивается как пара противоположно расположенных панелей, где каждая закруглена вокруг человека. Эти панели могут использоваться, чтобы обеспечить контрольную точку (пункт) проверки безопасности, и могут использоваться вместе с одним или более другими устройствами, чтобы ограничить доступ лиц.
В еще одном варианте осуществления система включает в себя две или более решетки, удаленные друг от друга, чтобы определить область досмотра между ними. Решетки структурированы так, чтобы окружать эту область, чтобы досмотреть человека или объект с помощью электромагнитного излучения на одной или более частот в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц. Также включены один или более процессоров, действующих так, чтобы установить данные, соответствующие изображению, определенному исходя из одного или более сигналов опроса, обеспеченных решетками. Один или более процессоров формируют выходные данные как функцию этих данных. Система также включает в себя устройство, реагирующее на эти выходные данные, чтобы обеспечить индикацию для оператора, если подозревается присутствие угрожающего безопасности объекта.
Следующий другой вариант осуществления настоящего изобретения включает в себя обеспечение двух или более решеток, каждая имеющая форму для окружения человека, расположенного между решетками; работу решеток для выполнения досмотра человека электромагнитным излучением на одной или более частот в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц; формирование данных изображения исходя из досмотра, чтобы обнаружить, скрывает ли человек объект.
Дополнительный вариант осуществления настоящего изобретения включает в себя генерирование электромагнитного излучения на одной или более частот в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц двумя или более решетками для выполнения досмотра человека, расположенного между ними; перемещение по меньшей мере одной из решеток по непрямой траектории относительно человека во время досмотра; формирование данных изображения исходя из досмотра, чтобы обнаружить, скрывает ли человек объект.
Еще один дополнительный вариант осуществления настоящего изобретения включает в себя выполнение досмотра человека с помощью электромагнитного излучения, которое имеет одну или более частот в диапазоне 200 МГц до приблизительно 1 ТГц. Одно или более изображений поперечного сечения человека формируют на основании досмотра и определяют, несет ли человек скрытый объект, который ставит под угрозу безопасность, из по меньшей мере одного из этих изображений.
Соответственно один объект настоящего изобретения должен обеспечить уникальную методику для обнаружения объектов, представляющих интерес.
Другой объект должен обеспечить уникальную систему, способ, устройство или аппаратуру для определения, скрывается ли объект, представляющий интерес.
Другие объекты, варианты осуществления, формы, признаки, преимущества, аспекты и выгоды от настоящего изобретения должны стать очевидными из подробного описания и включенных чертежей.
Краткое описание чертежей
Фиг.1 представляет частичный схематический вид системы осмотра безопасности.
Фиг.2 представляет частичный вид сверху системы согласно фиг.1 вдоль линии 2-2, показанной на фиг.1.
Фиг.3 и 4 изображают последовательности операций, иллюстрирующие одну процедуру работы системы, изображенной на фиг.1.
Фиг.5 представляет вид сверху системы, показанной на фиг.1, иллюстрирующий множество перекрывающихся дуговых сегментов.
Фиг.6 представляет последовательность операций одного типа подпрограммы обнаружения объекта.
Фиг.7 представляет последовательность операций другого типа подпрограммы обнаружения объекта.
Фиг.8 представляет диаграмму, иллюстрирующую сегментацию изображения на перекрывающиеся прямоугольные части для использования в подпрограмме, показанной на фиг.7.
Фиг.9 представляет диаграмму, сравнивающую три различных типа фильтров выделения признаков для использования с подпрограммой, показанной на фиг.7.
Фиг.10 является схематической блок-схемой устройства для обнаружения скрытых объектов, которое использует систему, показанную на фиг.1, чтобы выполнить процедуру по фиг.3 и 4 обеими подпрограммами, показанными на фиг.6 и 7.
Фиг.11 представляет частичный схематический вид сбоку дополнительной системы.
Фиг.12 представляет частичный схематический вид сверху системы, показанной на фиг.11 по линии 12 - 12, показанной на фиг.11.
Фиг.13 изображает сравнительную диаграмму, иллюстрирующую изображения поперечного сечения, сформированные в соответствии с различными способами настоящего изобретения.
Фиг.14 представляет частичный схематический вид другой системы.
Фиг.15 представляет частичный вид в разрезе портала, показанного на фиг.14.
Фиг.16 представляет частичное схематическое представление еще одной системы.
Фиг.17 представляет частичное схематическое представление еще одной системы.
Фиг.18 изображает частичный вид сверху системы по фиг.17 по линии 18-18, показанной на фиг.17.
Подробное описание
Хотя настоящее изобретение может быть воплощено во многих различных формах, с целью содействия пониманию принципов изобретения ссылка делается на варианты осуществления, проиллюстрированные на чертежах, и будет использоваться специфический язык, чтобы его описать. Однако понятно, что никакое ограничение объема изобретения, таким образом, не предполагается. Любые изменения и дальнейшие модификации в описанных вариантах осуществления и любых дальнейших применениях принципов изобретения, которое описано здесь, предполагается как обычно реализуемые специалистом в данной области техники, к которой имеет отношение изобретение.
Фиг.1 иллюстрирует систему 20 осмотра безопасности согласно одному варианту осуществления настоящего изобретения. Во время работы система 20 опрашивает одушевленный или неодушевленный объект, облучая его с помощью электромагнитного излучения в частотном диапазоне от 200 Мегагерц (МГЦ) до 1 Терагерц (ТГц) и обнаруживая отраженное излучение. Обычно соответствующие диапазоны волн изменяются от нескольких сантиметров до нескольких микрометров. Некоторые естественные и синтетические оптические волокна часто являются прозрачными или полупрозрачными для таких частот/длин волн, позволяя обнаружение и/или отображение поверхностей, расположенных позади таких материалов. Когда предметом досмотра является одетый индивидуум, видеоинформация относительно частей тела человека, закрытого одеждой или предметами одежды, могут обычно получаться с помощью системы 20, так же как и тех частей, которые не закрыты одеждой или предметами одежды. Далее, видеоинформацию относительно объектов, которые несет человек под одеждой, можно обеспечивать системой 20 для композиций металлических и неметаллических объектов, обычно используемых для оружия и контрабанды.
Как иллюстрировано на фиг.1, тело B имеет форму человека 22, представленного для досмотра системой 20. Человек 22 изображается обычным способом, по меньшей мере частично закрытым предметами одежды или одеждой, обозначенной более конкретно ссылочными позициями 24a и 24b. Элементы 24a и 24b одежды скрывают объект 25, показанный в форме оружия пунктиром. Человек 22 расположен в портале 30 сканирования/облучения системы 20. Портал 30 сконфигурирован для размещения в контрольной точке проверки безопасности, где желательно обнаружить оружие и/или контрабанду. Портал 30 включает в себя платформу 32, соединенную с двигателем 34. Платформа 32 выполнена с возможностью служить опорой человеку 22 или другому такому объекту, который требуется исследовать системой 20. Двигатель 34 размещается так, чтобы выборочно вращать платформу 32 относительно оси R вращения, в то время как человек 22 расположен на ней. Для показанной ориентации ось R является приблизительно вертикальной, и человек 22 находится обычно в центральной позиции относительно оси R и платформы 32. В одном варианте платформа 32 может состоять из материала, такого как органический термопластик или термореактивный полимер, который разрешает досмотр в или под подошвами ботинок, где может иногда скрываться оружие.
Портал 30 также включает в себя многоэлементную воспринимающую решетку 36. Обращаясь дополнительно к частичному виду сверху на фиг.2, иллюстрируется соотношение платформы 32 с решеткой 36. Ось R обычно является перпендикулярной плоскости вида фиг.2 и представлена перекрестиями. Когда двигатель 34 вынуждает платформу 32 вращаться относительно оси R, решетка 36 описывает обычно круговую траекторию P относительно оси R. Круговая траектория P соответствует воображаемому цилиндру C с радиусом D, который соответствует области досмотра для портала 30. Радиус D является расстоянием от оси R до решетки 36. В одном предпочтительном варианте радиус D составляет приблизительно от 0,25 до приблизительно 3 метров. В более предпочтительном варианте радиус D составляет приблизительно от 0,5 метра до 1,5 метров, соответствуя приблизительно от 1 метра до 3 метров в диаметре. Стрелка А, показанная на фиг.1 и 2, представляет выборочное вращение платформы 32 относительно оси R.
Воспринимающая решетка 36 включает в себя множество линейно располагаемых элементов 38, только несколько из которых схематично проиллюстрированы и специально обозначены ссылочными позициями, чтобы сохранить ясность. Каждый элемент 38 работает так, чтобы передавать или принимать электромагнитное излучение в пределах выбранной полосы частот. Воспринимающая решетка 36 подсоединена к обрабатывающей подсистеме 40. Подсистема 40 включает в себя приемопередатчик 42 с коммутирующим дешифратором 43, подсоединенным к элементам 38 решетки 36. В одном варианте позиция решетки 36 относительно платформы 32 определяется одним или более позиционными кодерами (не показаны), которые подсоединены к подсистеме 40. В других вариантах могут использоваться одно или более различных устройств отслеживания позиции и/или способов отслеживания позиции.
Под управлением приемопередатчика 42 отдельные элементы 38 могут быть выборочно активизированы коммутирующим дешифратором 43. Каждый элемент 38 выделен для передачи или приема. Элементы 38 размещаются в двух обычно вертикальных стойках, размещаемых впритык друг с другом. Элементы 38, составляющие одну из стоек, выделены для передачи, и элементы 38, содержащие другую из стоек, выделены для приема. Число элементов 38 в каждой стойке находится в диапазоне приблизительно от 32 до приблизительно 2000 элементов и занимают расстояние приблизительно от 2 до 2,5 метров по вертикали по оси R; однако в других вариантах осуществления могут использоваться другие вертикальный промежуток и/или число элементов. Приемопередатчик 42 может управлять коммутирующим дешифратором 43, чтобы облучать тело B только одним элементом 38 из стойки передачи в данный момент времени и одновременно принимать одним или более элементов 38 из стойки приема. Приемопередатчик 42 включает в себя логику, чтобы задавать последовательную активацию каждого элемента 38 из стойки передачи и соответствующий один или более элементов 38 из стойки приема, чтобы обеспечить сканирование части человека 22 вдоль вертикального направления стойкой 36. Соответствующая информация о "вертикальном пробеге" или "времени пролета" может использоваться, чтобы обеспечить позиционные данные относительно соответствующей части человека 22 при досмотре. Дальнейшая информация относительно таких конструкций обеспечивается в патенте US 5859609 с обычным образом переданными правами, который тем самым включен по ссылке.
В предпочтительном варианте осуществления приемопередатчик 42 и элементы 38 решетки 36 имеет форму, подходящую для передачи и/или приема электромагнитного излучения, выбранного из диапазона приблизительно один Гигагерц до приблизительно один Терагерц (приблизительно 1 ГГц до приблизительно 1 ТГц), который соответствует диапазону длин волн электромагнитного излучения в свободном пространстве приблизительно от 0,3 метра (м) до приблизительно 300 микрометров (мкм). В другом предпочтительном варианте осуществления используется конструкция импульсного приемопередатчика, который генерирует частоты в диапазоне приблизительно от 200 МГц до приблизительно 15 ГГц в зависимости от ширины импульса, которая соответствует диапазону длин волн электромагнитного излучения в свободном пространстве приблизительно от 1,5 м до приблизительно 0,02 м. В более предпочтительном варианте осуществления частотный диапазон составляет приблизительно от 1 ГГц до приблизительно 300 ГГц с соответствующим диапазоном волн в свободном пространстве приблизительно от 0,3 метра до приблизительно 1 миллиметра (мм). В наиболее предпочтительном варианте осуществления частотный диапазон составляет приблизительно от 5 ГГц до приблизительно 110 ГГц с соответствующим диапазоном волн в свободном пространстве приблизительно от 0,06 м до приблизительно 2,7 мм.
Траектория передачи для заданного элемента 38 из стойки передачи может быть выбрана так, что составляет ту же длину, что и траектория передачи для соответствующего(их) элемента(ов) 38 из стойки приема, чтобы упростить калибровку. Тем не менее, в других вариантах осуществления конструкция передачи/приема может отличаться. Например, в одном альтернативном варианте осуществления используются один или более элементов 38 и для передачи и приема. В другом альтернативном варианте осуществления используется смешение обоих подходов. Как правило, сигналы, принятые от решетки 36, являются пониженными по частоте и преобразованы в обрабатываемый формат посредством применения стандартных способов. В одном варианте приемопередатчик 42 имеет бистатическую частоту непрерывного ЧМ-сигнала (FM/CW) гетеродина, подобно тому, как описано в патенте US 5859609 (включенном по ссылке). С обычным образом переданными правами патенты US 5557283 и 5455590, каждый из которых включен здесь по ссылке, обеспечивают несколько неограничивающих примеров других конструкций приемопередатчика. В других вариантах осуществления может использоваться смешение различных конфигураций приемопередатчика/воспринимающих элементов с наложением или неналожением частотных диапазонов, что может включать в себя один или более импульсного типа, моностатического гомодинного типа, бистатического гетеродинного типа и/или такого другого типа, как очевидно специалисту в данной области техники.
Приемопередатчик 42 подает данные, соответствующие сигналам решетки, к одному или более процессорам 44 подсистемы 40. Процессор(ы) 44 может, каждый, состоять из одного или более компонентов любого типа, подходящих для обработки данных, полученных от приемопередатчика 42, включая цифровую схему, аналоговую схему или комбинацию обоих. Процессор(ы) 44 могут быть программируемого типа; специализированными, автоматом с фиксированным монтажом или их комбинацией. Для многопроцессорного варианта может использоваться распределенная, конвейерная и/или параллельная обработка в качестве подходящей.
Память 46 включена в процессор(ы) 44. Память 46 может иметь многообразную форму среди твердотельной, электромагнитной, оптической или комбинации этих форм. Кроме того, память 46 может быть энергозависимой, энергонезависимой или смесью этих типов. Память 46 может быть по меньшей мере частично интегрирована с процессором(ами) 44. Сменное ЗУ (RМD) 48 также включено в процессор(ы) 44. RМD 48 может быть в форме дискеты, картриджа или в форме магнитной ленты сменных электромагнитных носителей записи; оптическим диском типа CD-ROM или DVD типа; электрически перепрограммируемой энергонезависимой памяти твердотельного типа и/или подобного, как очевидно специалисту в данной области техники. В других вариантах осуществления RМD 48 отсутствует.
Подсистема 40 подсоединена к двигателю 34, чтобы выборочно управлять вращением платформы 32 процессором(ами) 44 и/или приемопередатчиком 42. Подсистема 40 размещена в станции 50 контроля/управления, которая также включает в себя одно или более устройств 52 ввода данных оператора и одно или более устройств 54 отображения. Устройство(а) 50 ввода данных оператора может включать в себя клавиатуру, мышь или другое устройство управления позицией, подсистему ввода распознавания речи и/или отличную конструкцию, как очевидно специалистам в данной области техники. Устройство(а) 52 отображения оператора может быть типа электронно-лучевой трубки (ЭЛТ, CRT), типа дисплея на жидких кристаллах (LCD, ЖК), плазменного типа, типа органического светодиода (OLED) или такого отличного типа, как очевидно специалистам в данной области техники. Станция 50 выполнена с возможностью управления одним или более операторами пункта проверки безопасности, ответственных за работу системы 20, как дополнительно описано ниже.
Система 20 дополнительно включает в себя подсистему 60 связи, подсоединенную к подсистеме 40 линией 62 связи. Подсистема 60 включает в себя сетевой сервер 63, соединенный с компьютерной сетью 70. Компьютерная сеть 70 может быть обеспечена в форме локальной сети (ЛС, LAN), региональной локальной сети (MAN, МЛС) и/или глобальной сети (ГС, WAN) или частного типа или публично доступного типа, такой как Интернет. Линия 62 связи может быть обеспечена такой сетью или быть одной из многообразия выделенных каналов связи. Сервер 63 может быть расположен удаленно относительно подсистемы 40. Действительно, в одном варианте осуществления сервер 63 соединен к ряду удаленно расположенных подсистем 40 с соответствующими порталами 30. В других вариантах осуществления более одного сервера 63 могут быть подсоединены к общему порталу 30 и конструкции подсистемы 40. Альтернативно или дополнительно сервер 63 может быть неотъемлемой частью подсистемы 40. Для других вариантов осуществления сервер 63, сеть 70 и узлы 80 отсутствуют. Действительно, RМD 48 может использоваться, чтобы альтернативно или дополнительно передавать данные между подсистемой 40 и другими устройствами вычисления/обработки.
Сервер 63 выполнен с возможностью обмениваться по сети 70. Компьютерная сеть 70 связывает множество узлов 80 вместе. Каждый узел 80 включает в себя компьютер 82, выполненный с возможностью взаимодействовать с компьютерной сетью 70. Каждый компьютер 82 включает в себя одно или более устройств 50 ввода данных оператора и одно или более операторских устройств 52 вывода, как описано выше для подсистемы 40, которые не показаны, чтобы сохранить ясность. Устройство(а) 50 и 52 в каждом узле 80 выборочно обеспечивает возможность операторского ввода и вывода (ввода/вывода). Компьютер 82 может быть в форме другой подсистемы 40, персонального компьютера или компьютерной рабочей станции, другого компьютерного сервера, персонального цифрового ассистента (PDA) и/или отличной конфигурации, как очевидно специалисту в данной области техники. Хотя только два узла 80 проиллюстрированы, чтобы сохранить ясность, должно быть понятно, что больше или меньше их может быть соединено посредством компьютерной сети 70.
В целом, сервер 63, компьютерная сеть 70 и узлы 80 обеспечивают структуру для удаленного соединения со станцией 50. Взаимосвязь этих компонентов может быть аппаратной, беспроводной или их комбинацией. Вместо или в дополнение к сети 70 один или более узлов 80 и сервер 63 могут быть соединены выделенной линией связи или подобным. Обмен по сети 70 может использоваться, чтобы контролировать работу станции 50, обновлять программное обеспечение, связанное с подсистемой 40, удаленно управлять станцией 50 или порталом 30 и/или совместно использовать данные, подходящие для распознавания подозрительных объектов с помощью системы 20, как более подробно описано ниже. В одной такой структуре один или более узлов 80 сконфигурированы как хранилище для данных, подходящих для просмотра в отношении безопасности с помощью системы 20.
Дополнительно со ссылками на последовательность операций на фиг.3 один режим операционной системы 20 проиллюстрирован как процедура 120. Процедура 120 выполняется системой 20, чтобы обеспечить информацию изображения, представляющую человека 22, несущего объект 25. Процедура 120 начинается с операции 121. Во время операции 121 человек 22 входит в портал 30 в контрольной точке проверки безопасности для проверки на сокрытие оружия, контрабанды и/или других элементов/материалов. Процедура 120 переходит к операции 122 инициализации, которая устанавливает индекс "I" досмотра равным одному (I=1). После операции 122 процедура 120 входит в цикл 124 досмотра, начинающийся с подпрограммы 130 досмотра. Подпрограмма 130 досмотра досматривает часть человека 22 в пределах поля зрения решетки 36, когда человек 22 вращается на платформе 32. Индекс I является целочисленным указателем на число различных подпрограмм 130 досмотра, выполняемых как часть процедуры 120.
Со ссылками на фиг.4 далее проиллюстрирована подпрограмма 130 досмотра. Подпрограмма 130 начинается с операции 132 инициализации, в которой индекс N передачи установлен равным одному (N=1). От операции 132 входят в цикл 134 задания последовательности элементов, начинающийся с операции 136 передачи/приема. Индекс N является целочисленным индексом числа операций 136 передачи/приема, выполняемых в течение подпрограммы 130. Во время операции 136 часть человека 22 в поле зрения передающего элемента номер "N" решетки 36 облучается электромагнитным излучением и один или более соответствующих принимающих элементов собирают отраженное электромагнитное излучение в ответ на передачу. Передающие и принимающие элементы выбираются логикой приемопередатчика 42 с помощью коммутирующего дешифратора 43, как описано выше. От операции 136 подпрограмма 130 переходит к условному выражению 138, на котором проверяют, является ли передающий элемент номер "N" последним элементом для передачи (N=LAST?); где LAST - общее количество передающих элементов, которые должны быть активизированы приемопередатчиком 42.
В одном варианте для каждого выполнения подпрограммы 130 передающий элемент "N" выполняет качание по выбранному частотному диапазону дважды и соответствующая информация обратного рассеяния для каждого из двух качаний принимается различным принимающим элементом. Передающие элементы могут быть расположены каскадно относительно принимающих элементов так, что передающий элемент N выравнивается с точкой между двумя принимающими элементами вдоль общей оси решетки. Патент US 5557283 (включенный по ссылке) описывает пример такой конструкции принимающих и передающих элементов. В других вариантах осуществления может использоваться отличная методика, использующая больше или меньше качаний, различные типы качаний и/или отличные ориентации передачи/приема и количества.
Если результат условного выражения 138 отрицательный (N<LAST), то выполняется операция 142 увеличения, увеличивая N на единицу (N=N+1). Цикл 134 возвращается от операции 142 к операции 136 передачи/приема для выполнения поднабором элементов 38 передачи/приема, соответствующих новому увеличенному значению N, операции 142. Таким образом, элементы 38 активизируются по вертикальной траектории вдоль решетки 36 приемопередатчиком 42, чтобы обеспечить данные вдоль непрерывной области человека 22.
Разрешающая способность информации досмотра, полученной приемопередатчиком 42, может быть расширена линейным качанием по выбранному ультраширокому частотному диапазону в течение каждой операции 136. В одном предпочтительном варианте осуществления приемопередатчик 42 выполняет качание по диапазону по меньшей мере 10 ГГц для каждого выполнения операции 136. Это качание может происходить, например, по диапазону приблизительно от 10 ГГц до приблизительно 20 ГГц. В более предпочтительном варианте осуществления приемопередатчик 42 и элементы 38 приспособлены для диапазона качания, равного 16 ГГц. Это качание может происходить, например, по диапазону приблизительно от 24 ГГц до приблизительно 40 ГГц. В одном наиболее предпочтительном варианте осуществления ультраширокий диапазон качания выбран таким, что разрешающая способность по дальности является в общем такой же, как разрешение по плоскости. Для этих вариантов осуществления элементы 38 выбраны с частотным откликом, подходящим для выбранного диапазона качания, включая, но не ограничиваясь, клинообразную щелевую антенну или антенну продольного излучения. В другом варианте осуществления передатчик может выполнять качание по заданному частотному диапазону (такому как от 10 ГГц до 20 ГГц) в псевдослучайном порядке, иногда известный как прыжки по частоте.
Цикл 134 повторяют LAST число раз, задавая последовательность посредством требуемых передающих/принимающих элементов 38 решетки 36 под управлением приемопередатчика 42. Когда результат условного выражения 138 является истинным, подтверждающий переход приводит к операции 144 над данными. Данные, полученные после выполнения операции 136, выдаются приемопередатчиком 42 на процессор(ы) 44. В операции 144 над данными, набор данных досмотра устанавливают для информации, собранной посредством повторного выполнения операции 136 от N=1 до N=LAST. Этот набор данных соответствует текущему значению целочисленного индекса I и части, облученной в течение этих выполнений. Первоначально набор данных досмотра может быть накоплен и организован приемопередатчиком 42, процессором(ами) 44 или обоими и затем сохранен в памяти 46 для дальнейшей обработки процессором(ами) 44, как описано со ссылками на оставшуюся часть процедуры 120. От операции 144 подпрограмма 130 возвращается на следующую стадию процедуры 120.
Со ссылками назад на фиг.3, процедура 120 продолжается условным выражением 152, на котором проверяют, было ли достигнуто конечное значение индекса I (I=TOTAL?); где TOTAL - общее количество требуемых выполнений цикла 124 (и подпрограммы 130) для процедуры 120. Если результат условного выражения 152 отрицателен (I< TOTAL), процедура 120 продолжается операцией 154 увеличения, чтобы увеличить индекс I на единицу (I=I+1).
Цикл 124 затем возвращается к подпрограмме 130 для следующего выполнения, пока I не увеличится до тех пор, пока не станет равным TOTAL.
После выполнения цикла 124 TOTAL количество раз количество TOTAL наборов данных досмотра сохраняется в памяти 46. Когда результат условного выражения 152 является истиной, процедура 120 продолжается операцией 160 цилиндрической сегментации. Во время операции 160 наборы данных досмотра обрабатываются процессором(ами) 44, чтобы сформировать множество наборов данных цилиндрического изображения, каждый из которых соответствует дуговому сегменту цилиндра C. Со ссылками на фиг.2, дуговой сегмент S1 стягивает угол V обзора приблизительно 90 градусов по отношению к человеку 22. Дуговой сегмент S1 определяет цилиндрическую апертуру CA, которая вытянута вдоль оси R. Набор данных изображения, соответствующих дуговому сегменту S1, представляет трехмерную поверхность тела B, которая является отраженной по отношению к выбранному электромагнитному излучению, если рассматривать через цилиндрическую апертуру CA. В одном подходящем варианте осуществления набор данных изображения определен в терминах цилиндрических координат, хотя может использоваться любая трехмерная система координат. Каждый набор данных изображения определяется из данных досмотра, собранных для соответствующего дугового сегмента процессором(ами) 44. Ссылка делается на патент US 5859609 (включенный здесь по ссылке) для дальнейшего описания относительно определения цилиндрических данных изображения.
В течение операции 160 наборы данных цилиндрического изображения определяют для ряда дуговых сегментов относительно оси R, которые все вместе ограничивает человека 22. На фиг.5 восемь перекрывающихся дуговых сегментов S1, S2, S3, S4, S5, S6, S7 и S8 (все вместе сегменты S) проиллюстрированы по отношению к общей круговой траектории P и соответствующему цилиндру C. Сегменты S1, S3, S5 и S7 схематично представлены двунаправленными стрелками с внешней стороны траектории P, и сегменты S2, S4, S6 и S8 схематично представлены двунаправленными стрелками с внутренней стороны траектории P, чтобы сохранить ясность. На фиг.5 сегменты S, каждый, соответствует углу обзора приблизительно 90 градусов, и каждый перекрывается на два других примерно до 45 градусов. Должно быть понятно, что каждый различный сегмент S соответствует представлению различной части человека 22. В других вариантах осуществления угол обзора может отличаться и/или может быть неоднородным от одного дугового сегмента S к следующему. Альтернативно или дополнительно перекрытие может быть непостоянным или отсутствовать.
Процедуру 120 продолжает операция 162 отображения. Во время операции 162 данные изображения, полученные для ограничивающих дуговых сегментов S, отображаются процессором(ами) 44 на общую поверхность для тела B, которая в свою очередь определяет общий объем тела B. Операция 162 может включать в себя согласование точки данных для одного дугового сегмента S для заданного местоположения, которое отличается пороговой величиной от точки данных того же самого местоположения для другого дугового сегмента S. В одном варианте осуществления используется способ усреднения и промежуточные точки данных интерполируются. В другом варианте осуществления используется функция взвешивания, которая прогрессивно уменьшает вклад точки данных, когда расстояние этой точки данных от средней точки соответствующего дугового сегмента S увеличивается. Наборы данных в цилиндрических координатах предпочтительно объединяют несвязно (после вычисления величины (амплитуды)), чтобы уменьшить нежелательную фазовую интерференцию в изображениях. Операция 162 обеспечивает топографическое представление тела B и объем, ограниченный его поверхностью(ями) относительно оси R, которые являются отражательными относительно электромагнитного излучения, используемой для досмотров подпрограммы 130.
Процедуру 120 продолжает операция 164. Во время операции 164 один или более наборов данных изображения определяются процессором(ами) 44 из топографического представления тела B, обеспеченного на операции 162. Эти двумерные наборы данных изображения воспроизводятся из объемных данных для тела B, выполняя двумерное параллельное проецирование луча из требуемого угла обзора. Вдоль каждого параллельного луча интенсивность уменьшается пропорционально данным, с которыми он встречается в объемном представлении. После ослабления выбирается максимальная интенсивность элемента объема, чтобы представить интенсивность пикселя изображения для соответствующего луча. Коэффициент ослабления регулируется так, чтобы задняя поверхность представления не вносила вклад в визуализацию. В общем случае результатом является двумерная карта интенсивности пикселей изображения для каждого выбранного угла обзора. Помимо отображения интенсивности могут быть отображены другие характеристики осматриваемого предмета. Например, интервал от решетки 36 досмотра до выбранной области объекта может использоваться, чтобы сформировать характерную карту изображения. В одной реализации может использоваться интервал, чтобы сформировать карту относительной глубины отражающей поверхности осматриваемого предмета относительно назначенных опорных местоположений. В частности, интервал (глубина) может быть определен из разностей во временной задержке между передачей и обнаружением возвращаемой электромагнитной энергии. В одном специфическом варианте осуществления "переведенная в пиксели" карта изображения глубины обеспечивается из такой информации об интервале с опорными местоположениями ("пиксели глубины"), являющимися теми же самыми, что и местоположения максимальных пикселей интенсивности для основанной на интенсивности карты изображения. Этот пример далее рассматривается ниже со ссылками на подпрограмму 170a на фиг.6.
Каждый из наборов данных (карты) двумерного изображения может использоваться, чтобы отобразить соответствующее изображение с помощью устройства (устройств) 52 подходящим образом. В одном варианте осуществления ряд двумерных изображений из различных углов обзора воспроизводится из объемного представления во время операции 164. Эти изображения могут быть представлены в выбранной последовательности, чтобы обеспечить анимацию тела B. В одном варианте используется последовательность приблизительно от 32 до приблизительно 64 обычно равномерно удаленных видов относительно оси R, чтобы сформировать анимацию вращения тела B относительно оси R. В других вариантах осуществления данные, представляющие один или более двумерных изображений/карт, могут быть определены без промежуточного формирования топографического представления. Системы, использующие плоскую форму решетки для сканирования предмета, особенно подходят для непосредственной генерации данных двумерного изображения/карты, такие как система, описанная ниже, например, со ссылками на фиг.14 и 15. В других вариантах осуществления отображение изображения может быть показано только частично, схематично зарегистрировано, и/или зависеть от обнаружения подозрительного объекта, как более подробно описано ниже.
От операции 164 процедура 120 продолжается выполнением операции 170 обнаружения объекта. Во время операции 170 выполняется определение, несет ли человек один или более объектов, представляющих интерес, типа тех, что могут ставить под угрозу безопасность. Эти объекты могут быть полностью или частично скрыты одеждой человека 22. В одном варианте определение первоначально выполняется просмотром одного или более изображений, воспроизведенных во время операции 164. Альтернативно или дополнительно выполняется численная обработка данных изображения, чтобы определить, несет ли человек 22 один или более подозрительных объектов, типа скрытого объекта 25, показанного на фиг.1. Неограничивающие примеры таких численных способов далее описаны со ссылками на фиг. 6-10. После операции 170 проверяется условное выражение 195, были ли любые подозрительные объекты индицированы. Если результат условного выражения 195 отрицательный (ложь), процедура 120 завершается. Если результат условного выражения 195 положительный (истина), процедура 120 продолжаются операцией 200. Во время операции 200 о присутствии подозрительных объектов сообщается оператору.
Это сообщение может включать в себя отображение изображения некоторой (части) или всего предмета, связанного с подозреваемым объектом, которое формируется во время операции 164. Визуальные и/или слышимые предупредительные сигналы могут быть сгенерированы во время операции 200, чтобы сфокусировать внимание оператора на человеке, проходящего осмотр, и/или соответствующем изображении. Необязательно особенности изображения подозреваемого могут быть подсвечены в соответствии с визуальной характеристикой, такой как идентифицирующий цвет, мигание/подсветка или другое изменение интенсивности и т.п. На основании этого отображения оператор может определять, есть ли основания для дальнейшего осмотра, если человек 22 был задержан как представляющий риск для безопасности и т.п. Дополнительно или альтернативно информация, имеющая отношение к классификации и обнаружению объектов, может быть отображена в текстовой или графической форме для рассмотрения оператором. В качестве другой опции различные виды человека и/или областей изображения подозреваемого могут быть отображены одновременно. В дополнительных вариантах оператор может переключаться между различными видами и/или может увеличивать или уменьшать для изменения относительного размера изображения, отображаемого с использованием устройства (устройств) 52 ввода данных. В других вариантах осуществления сигналы тревоги могут использоваться для уточнения критериев обнаружения, как требуется.
Чтобы скрыть/укрыть особенности тела, к которым могут быть предъявлены возражение о личной тайне, тело человека может быть отображено как схематическое изображение тела, например силуэта, манекена, каркасного тела, другого нейтрального к полу человека представления, и/или как фотография в видимом световом диапазоне или видео представление человека. На таких представлениях тела соответственно расположенное перекрытие любых подозрительных объектов может быть отображено для рассмотрения оператором. Альтернативно или дополнительно вопросы личной тайны могут быть решены посредством осмотра изображения поперечного сечения, взятые по высоте человека 22, чтобы по меньшей мере частично оценить, несут ли потенциально подозрительный объект. Один подход к отображению поперечного сечения подробно описан в патенте US 6507309 (включенный по ссылке), который вместо этого посвящен сбору размерной информации о секционированной области, такой как ее окружность. Другие новые аспекты секционных представлений ниже описаны со ссылками на экспериментальные примеры, проиллюстрированные со ссылками на фиг.13.
Чтобы дополнительно уменьшить объем просматриваемых оператором изображений, которые могут быть подвергнуты рекламации о личной тайне, может использоваться числовая обработка во время операции 170, чтобы первоначально идентифицировать, какие изображения должны быть представлены оператору, в частности только те, для которых такая обработка указала присутствие подозрительного объекта. Соответственно оператор только просматривает изображения, которые обозначены, чтобы показать один или более объектов, представляющих интерес, типа оружия или контрабанды, и вопросы о личной тайне по меньшей мере разумно уменьшаются, если не полностью устраняются. В других вариантах осуществления отображение изображений тела под одеждой может быть условно или безоговорочно приемлемо или может в целом отсутствовать. Альтернативно или дополнительно информация, собранная подсистемой 40, посылается через компьютерную сеть 64 к одному или более удаленным узлам 80. Узлы 80 могут выполнять некоторую или всю обработку данных процедуры 120 вместо процессора(ов) 44. В одном процессе одетый индивидуум ненавязчиво сканируется порталом 30 и видеоинформация посылается через сервер 63 и сеть 70 на назначенный компьютер 82. Альтернативно или дополнительно к основной информации относительно человека, несущего представляющий интерес объект, можно обращаться через сервер 63 и сеть 70.
После выполнения операции 200 процедура 120 заканчивается. Также если условное выражение 195 дает отрицательный результат, процедура 120 заканчивается, пропуская операцию 200. Должно быть понятно, что процедура 120 может быть повторена для каждого человека, проходящего через данную контрольную точку проверки безопасности, и/или может быть повторена множество раз для данного человека, если результаты кажутся неоднозначными.
Подпрограммы 170a и 170b числовой обработки описаны ниже со ссылками на фиг. 6-10. Подпрограммы 170a и/или 170b могут быть осуществлены системой 20 тем же самым способом, как процедура 120 или как ее часть. Относительно подпрограммы 170a, в частности, было обнаружено, что интенсивность и глубина могут использоваться, чтобы различить сделанные человеком объекты, которые несет человеческий субъект. Вообще, сделанные человеком объекты, такие как используемые в качестве оружия или контрабанды, часто имеют плоские поверхности и острые грани, которые могут быть отличены от обычно более гладких, изогнутых поверхностей человеческого субъекта на основании отображения интенсивности и глубины, обеспеченных отраженной/возвращаемой электромагнитной энергией, имеющей одну или более частот в диапазоне от 200 МГц до 1 ТГц. Подпрограмма 170a является одним вариантом осуществления, реализующим это обнаружение.
В подпрограмме 170a числовая обработка данных изображения выполняется во время операции 170 вместо или в дополнение к любому другому подходу для обнаружения, чтобы определить, присутствуют ли один или более подозрительных объектов типа оружия и/или контрабанды, которые несут под одеждой человека 22. Со ссылками на фиг.6 подпрограмма 170a показывается в виде последовательности операций. Подпрограмма 170a начинается с установки счетчика F изображения равным единице (F=1) во время операции 172a. Счетчик F индексирует соседние изображения из операции 162 для обработки в подпрограмме 170a. Первоначально подпрограмма 170a генерирует две различных двумерных карты данных изображения такого типа, как описано выше со ссылками на операцию 164 процедуры 120. Ими являются: (a) двумерная карта, полученная из топографического представления на основании максимальной интенсивности пикселей (карта интенсивности), и (b) двумерная карта на основании относительной глубины отражающей поверхности, которая определена из информации об интервале (карта глубин).
Для каждой карты F изображения подпрограмма 170a выбирает множество меньших частей изображения, чтобы каждую отдельно оценить в операции ядра, индексированной счетчиком K. Каждое ядро K карты изображения соответствует группе пикселей изображения из карты интенсивности и карты глубины. Эта группа пикселей изображения имеет одни и те же относительные местоположения в каждой из двух карт. Во время операции 174a счетчик K индекса ядра устанавливается в единицу (K=1). От операции 174a подпрограмма 170a переходит к операции 176a. Во время операции 176a ядро K текущего изображения F выбирается для обработки.
После операции 176a подпрограмма 170a продолжается операцией 178a. Во время операции 178a применяется разностный оператор к карте глубины для ядра K, чтобы обеспечить соответствующую карту разности глубин. В частности, этот разностный оператор аппроксимирует производную двумерной карты глубины, используя операцию дифференцирования. В других вариантах осуществления может использоваться подобным образом дифференциальный оператор. Используемый здесь термин "разность глубин" для карты или изображения предназначен для того, чтобы ссылаться на результат или непрерывного дифференциала и/или дискретную операцию дифференцирования, примененную к карте глубины. Соответственно должно быть понятно, что операция, выполненная как функция глубины, охватывает, но не ограничивается более конкретной операцией, выполненной как функциональная разность глубин.
От операции 178a подпрограмма 170a переходит к операции 180a. Во время операции 180a от карты интенсивности для ядра K и карты разности глубин для ядра K обеспечивается ввод на соответствующие входы нейронной сети для адаптивной обработки. В одном варианте извлеченные особенности (признаки) вводятся в многоуровневую перцептронную форму нейронной сети. Сеть сконфигурирована для идентификации объектов посредством повторяющегося процесса обучения, такого как алгоритм обратного распространения ошибки. В других вариантах осуществления может дополнительно или альтернативно использоваться отличный тип нейронной сети и/или методика обучения. В других вариантах осуществления может использоваться отличный тип способа адаптивной обработки в дополнение или как альтернатива нейронной сети, такой как нечеткая логика, экспертная обучающая система с участием оператора, или подобные. Далее, может быть использована альтернативно или дополнительно неадаптивная обработка. Также должно быть оценено, что некоторая или вся требуемая информация о разности глубин может быть выполнена встроенной в операцию 180a вместо операции 178a на основании ввода непосредственной информации карты изменения глубины, и/или отличная функция, зависящая от глубины, может быть введена в нейронную сеть, используя способы, известные специалистам. Альтернативно или дополнительно отличная функция, зависящая от видеоинформации интенсивности, может быть введена в нейронную сеть вместо некоторой или всей непосредственной информации карты интенсивности, используя способы, известные специалистам в данной области техники.
В одном конкретном варианте используется ядро размером 7 на 7 пикселей для данных как интенсивности, так и глубины. Для этого подхода одна форма перцептронной нейронной сети, которая использовалась, включала в себя четыре уровня с 98 входами (7×7=49 пикселей от каждого из двух входных источников, чтобы обеспечить в целом 49×2=98 входов). Эта сеть включала в себя 140 нейронов в первом скрытом уровне, 25 нейронов во втором скрытом уровне и два выхода. Эти выходы представляют классы: (1) идентифицируемый как сделанный человеком объект и (2) не идентифицируемый как сделанный человеком объект. Могут быть включены другие классы, такие как соответствующие идентификации "человеческого" атрибута. В выполненном эксперименте нейронная сеть одновременно исследовала обе области отображения с 49 пикселями интенсивности и разности глубин, чтобы решить, имелся ли искусственный объект в пределах окна ядра. Для каждого обработанного ядра K выходные результаты сравнивают с пороговым значением, чтобы обеспечить дискретный результат во время операции 181a. Этот порог может быть вручную и/или динамически откорректирован на основании частоты ложных сигналов тревоги, скорости обнаружения или подобных.
От операции 180a подпрограмма 170a переходит к условному выражению 182a, на котором проверяют, является ли ядро K последним (FINAL) ядром данного изображения, требующим анализа. Если нет, по ветви отрицательного (ложного) результата условного выражения 182a переходят на оператор 183a, чтобы увеличить K (K=K+1). От операции 183a подпрограмма 170a возвращается к операции 176a посредством цикла 184a, чтобы обработать следующее ядро K интенсивности и ядро K глубины изображения F. Для каждого выполнения цикла 184a ядро K смещается к отличной группе пикселей; однако один или более пикселей могут быть включены в два или более ядер K, так что имеется степень перекрытия. В других вариантах осуществления один или более пикселей могут быть пропущены от одного ядра K к следующему ядру K. В других вариантах осуществления состав пикселей ядра K может зависеть от характера выхода нейронной сети. В одном специфическом примере степень перекрытия между ядрами K увеличивается, когда подозрительный объект указывается адаптивной обработкой, и/или обработка выбранного ядра реконфигурируется, чтобы обработать ранее пропущенные пиксели, ближайшие к любым пикселям, указывающим такой объект.
Поскольку различные ядра K из двух карт обрабатываются нейронной сетью в цикле 184a, пороговые выходные результаты накапливаются во время операции 181a, чтобы снабдить соответствующую адаптивно обработанную карту изображения дискретной индикацией относительно любых подозрительных искусственных (сделанных человеком) обнаруженных объектов. Эта карта изображения соответствует выходному результату для каждого ядра K и соответственно может иметь разрешающую способность, зависящую от способа(ов), используемых для определения ядер. Также должно быть понятно, что хотя цикл 184a обрабатывает одно ядро K одновременно, в других вариантах осуществления два или более ядер могут быть обработаны параллельно и/или могут использоваться различные размеры или конфигурации ядер. Если результат условного выражения 182a указывает, что последнее ядро K было обработано для изображения F, то по ветви подтверждения (истина) от условного выражения 182 переходят к операции 187a.
Во время операции 187a применяются один или более фильтров, чтобы удалить ложные сигналы тревоги и/или ложные отрицательные результаты от адаптивно обработанного изображения, предусмотренного для изображения F посредством повторной обработки различных ядер K в цикле 184a. В одном варианте применяется медианный фильтр, который заменяет каждый пиксель средним значением его соседей, чтобы вообще удалить отдельные резко отклоняющиеся пиксели, потенциально полученные шумом. Альтернативно или дополнительно могут использоваться один или более морфологических фильтров, чтобы изменить структуру изображения. Такие морфологические фильтры могут иметь тип эрозии и/или расширения. Используемый здесь термин "фильтр расширения" утолщает объект, заполняя пустые пространства, и "фильтр эрозии" утончает объект, удаляя случайные (паразитные) пиксели. В одном конкретном экспериментальном примере последовательность от трех до четырех фильтров использовалась с различными параметрами настройки, чтобы произвести сначала операцию фильтрации эрозии и затем операцию фильтрации расширения.
После операции 187a выполняют условное выражение 188a, на котором проверяют, являются ли множество кадров доступным для конкретного типа способа отображения. В особенности множество кадров обычно производятся процедурой 120, обеспечивая подтверждающий (истинный) результат для условного выражения 188a. После подтверждения переходят к операции 189a, на которой сравнивают местоположения подозреваемых объектов одного кадра со следующим, чтобы обеспечить достоверность обнаружения объекта, если подозрительный искусственный объект найден в смежных кадрах. Если проверка "от кадра к кадру" подтверждает обнаруженный объект в условном выражении 190a, то подпрограмма 170a переходит к операции 192a по положительному (истинному) результату условного выражения 190a. Во время операции 192 местоположение подозрительного объекта сохраняется относительно карты изображения человека 22 для последующей обработки во время операции 200 процедуры 120. Если проверка "от кадра к кадру" является противоречивой, то результат условного выражения 190a - отрицательный (ложь), и подпрограмма 170a переходит к условному выражению 194a. Далее, для вариантов осуществления, в которых множество кадров недоступно и/или когда проверка "от кадра к кадру" нежелательна, результат условного выражения 188a является отрицательным (ложь), приводя к безусловному переходу подпрограммы 170a к операции 192a.
Условное выражение 194a проверяет, все ли изображения F обработаны. Если результат условного выражения 194a - отрицательный (ложь), то индекс F увеличивается (F=F+1) во время операции 195a, и подпрограмма 170a возвращается на операцию 174a по циклу 196a, чтобы повторить анализ ядра за ядром для следующего изображения F. Если все изображения были проанализированы, то выполняют переход по ветви подтверждения условного выражения 194a, и подпрограмма 170a останавливается, возвращаясь к ее вызывающей подпрограмме (такой как процедура 120).
Как добавление или альтернатива подпрограмме 170a числовая обработка данных изображения во время операции 170 может быть выполнена в соответствии с подпрограммой 170b, чтобы определить, присутствуют ли один или более подозрительных объектов, типа оружия и/или контрабанды, которые несут под одеждой человека 22. Со ссылками на фиг.7 подпрограмма 170b показана в форме последовательности операций. Подпрограмма 170b начинается установкой счетчика F изображения равным 1 (F=1) во время операции 172b. Счетчик F индексирует соседние изображения из операции 164 для обработки в подпрограмме 170b. От операции 172b подпрограмма 170b переходит к операции 174b. Во время операции 174b текущее изображение F сегментируется, или разбивается, на множество частей.
Со ссылками дополнительно на фиг.8 прямоугольная область IR изображения иллюстрируется в трех смежных полях. В крайнем левом поле область IR изображения сегментируется на первый набор, Набор 1, частей изображения, пронумерованных 0-17. В среднем поле область IR изображения сегментируется на второй набор, Набор 2, частей изображения, пронумерованных 18-27. Части 0-17 изображения перекрываются с частями 18-27 отображения, как проиллюстрировано в объединенном наборе в самом правом представлении области IR изображения на фиг.8. В одном варианте осуществления размер сегмента выбран так, чтобы быть достаточно большим, чтобы содержать большую часть области, необходимой для того, чтобы указать общий тип объекта, представляющего интерес, но не столь большим, чтобы затруднить локализацию такого объекта. В одной конструкции, использующей Ku-полосу электромагнитного излучения, был найден желательный размер сегмента, равный приблизительно 32 на 32 пикселей. Тем не менее, в других вариантах осуществления другие размеры, формы, шаблоны, степени равномерности и/или различные атрибуты могут быть изменены, как очевидно специалистам в данной области техники, с наложением или без наложения на части.
Со ссылками на фиг.7 подпрограмма 170b продолжается операцией 176b. Во время операции 176b данные изображения для каждого сегмента подвергаются преобразованию Фурье в пространственно-частотную область Фурье. Операция 176b может быть выполнена подсистемой 40, чтобы обеспечить соответствующее пространственно-частотное представление для каждого сегмента изображения. Как правило, такое представление является комплекснозначным. Было найдено, что искусственные (сделанные человеком) объекты часто имеют пространственное частотное представление, которое обычно имеет более высокий процент более высоких пространственных частот относительно естественных объектов, типа человеческого тела. Также пространственные частотные представления для сделанных человеком объектов имеют тенденцию доминировать в некоторых направлениях в пространственной гистограмме по пространству Фурье. Такие различия могут использоваться для классификации частей изображения, подозреваемых в обнаружении искусственного объекта.
Поскольку пространственная частотная информация типа обеспечиваемой операцией преобразования Фурье обычно использует комплексные числа, часто желательно упростить данные как часть процедуры обнаружения объекта. Во время операции 178b применяется фильтр извлечения, чтобы извлечь особенности из пространственного частотного представления, которое может указывать искусственный объект. Со ссылками дополнительно на фиг.9 три различных фильтра FR1, FR2, и FR3 экстракторов особенностей (признаков) проиллюстрированы в схематической форме относительно пространства Фурье. Экстрактор FR1 особенности имеет кольцеобразно-клиновую конфигурацию, включающую в себя полуплоскость клиньев и полуплоскость колец, центрированных на нулевой (0-й) частотной компоненте в пространстве Фурье. Для этого экстрактора клинья обеспечивают инвариантность масштаба и кольца обеспечивают инвариантность вращения. Фильтр FR2 экстракции имеет конфигурацию сектора. Интегрируя пространственные частоты в пределах каждого сектора, может быть получен набор особенностей, представляющих угловые и радиальные аспекты соответствующего сегмента изображения. Хотя и неинвариантный, фильтр FR2 экстракции может использоваться, чтобы идентифицировать объекты, имеющие предпочтительные ориентации и/или размеры. Фильтр FR3 экстракции имеет кольцевую конфигурацию, которая является инвариантной к вращению и, таким образом, представляет долю, основанную на радиальной пространственной частотной компоненте. Во время операции 178b могут применяться один или более этих типов фильтров экстракции (FR1, FR2, FR3) и/или может использоваться отличный тип фильтра экстракции. В других вариантах осуществления экстракция на этой стадии может отсутствовать.
Во время операции 180b особенности, извлеченные в течение операции 178b, подают в нейронную сеть, определенную подсистемой 40. В одном варианте извлеченные особенности вводят в многоуровневую перцептронную форму нейронной сети. Сеть сконфигурирована для идентификации объектов посредством повторяющегося процесса обучения, типа алгоритма обратного распространения ошибки. В других вариантах осуществления может дополнительно или альтернативно использоваться отличный тип нейронной сети и/или способа обучения. В других вариантах осуществления может использоваться отличный тип способа адаптивной обработки или как альтернатива нейронной сети, такой как нечеткая логика, экспертная обучающая система с участием оператора, или подобные. Альтернативно или дополнительно может использоваться неадаптивная обработка.
От операции 180b подпрограмма 170b продолжается условным выражением 182b, на котором проверяют, были ли все изображения обработаны в соответствии с операциями 174b-180b. Если нет, счетчик F индексируется (F = F+1) во время операции 184b, и цикл 186b возвращается к операции 174b, чтобы обработать следующее изображение. Если результат условного выражения 182b является подтверждающим, программа 170b продолжается на операции 188b, в которой результаты, полученные в цикле 186b для различных кадров изображения, сравниваются, чтобы определить, являются ли они совместимыми с другими. В одном неограничивающем примере относительно дугового сегмента S результаты изображения для дуговых сегментов S1 и S2 могли быть сравнены друг с другом до степени, с которой они перекрываются (см. фиг.5). Аналогично результаты перекрывающихся изображений для дуговых сегментов пар S2 и S3, S3 и S4, S4 и S5, S5 и S6, S6 и S7, S7 и S8, и S8 и S1 могут быть сравнены на совместимость во время операции 188b. В других вариантах осуществления может быть сделано большее или меньшее количестве кадров и/или различных сравнений "кадр-за-кадром". В других вариантах осуществления вообще не имеется никакого сравнения "кадр-за-кадром".
После операции 188b выполняют условное выражение 190b, на котором результаты сравнения кадров и/или один или более других желательных порогов/критериев обнаружения проверяют, чтобы определить, обозначены (индицированы) ли любые объекты, представляющие интерес. Если такие объекты обозначены, то связанные с человеком данные местоположения и изображения объекта сохраняют во время операции 192b. Если результат условного выражения 190b отрицательный, то подпрограмма 170b завершается, пропуская операцию 192b. Должно быть понятно, что выполнение любой из операций 174b-180b и 188b и/или условного выражения 190b может включать в себя сравнение результатов обработки с одним или более пороговыми значениями или другими критериями, чтобы определить, указывают ли соответствующее изображение, часть изображения или представление, особенность изображения и т.п. на объект, представляющий интерес. Любые такие критерии могут быть статическими или динамическими по природе. Динамические критерии могут быть корректируемыми оператором, адаптивно корректируемыми машиной и/или выборочно изменяемыми посредством различной методики, как очевидно специалисту в данной области техники. Со ссылками на фиг.3, как только подпрограмма 170b закончена, процедура 120 может перейти к условному выражению 195, и если один или более подозрительных объектов были обнаружены, к операции 200.
Фиг.10 иллюстрирует устройство 200 обнаружения объектов в виде блок-схемы. Устройство 200 может быть реализовано с системой 20. В системе 200 новые данные, базовые данные и данные коррекции для заданной решетки преобразователей вводят в препроцессор 204, как в целом обозначено ссылочной позицией 202. Выходной сигнал препроцессора 204 далее подается на генератор 206 отображения, который может формировать внутренние данные изображения, относящиеся к предмету, подвергаемому досмотру. Эти внутренние данные изображения представлены в полутоновой создаваемой компьютером форме как изображение 206a. Должно быть понятно, что эти внутренние данные изображения могут быть не отображены из-за проблем личной тайны и/или могут быть представлены способом, который маскирует особенности, связанные с полом, как описано выше со ссылками на процедуру 120.
Внутренние данные изображения, обеспеченные генератором 206, далее подают на нейронную сеть, которая включена в оператор 208. Нейронная сеть I сконфигурирована так, чтобы определять присутствие объекта на основании информации интенсивности и разности глубин, как описано со ссылками на подпрограмму 170a. В одном варианте оператор 208 выполнен с возможностью выполнять подпрограмму 170a, описанную выше со ссылками на фиг.6, для обнаружения возможных искусственных объектов или структурных особенностей. В дополнение к оператору 208 данные изображения далее выдаются на нейронную сеть II, которая включена в оператор 210. Оператор 210 выполнен с возможностью обнаружения пятнышка в изображении, которое является иногда показательным для некоторых типов диэлектрических материалов, включая некоторые типы взрывчатых веществ. Кроме того, данные изображения от генератора 206 выдаются на нейронную сеть III, которая включена в оператор 212. Оператор 212 необходим для обнаружения искусственных структурных особенностей на основании пространственной частотной информации. В одном варианте нейронная сеть 212 выполнена с возможностью выполнять подпрограмму 170b, описанную выше со ссылками на фиг. 7-9. Выходные сигналы операторов 208, 210 и/или 212 выдаются на различные фильтры 214, типа тех, что описаны со ссылками на подпрограммы 170a и/или 170b, чтобы обеспечить выходной сигнал, который указывает присутствие одного или более подозрительных объектов. Визуальное(ые) представление(я) объекта(ов) может накладываться на нейтральное к полу отображение силуэта, если они обнаружены. В одном варианте области, соответствующие такому(им) объекту(ам), показываются в контрастирующем цвете, тоне, оттенке или другими средствами, например теми, что описаны выше для процедуры 120. Изображение 214a является полутоновым создаваемым компьютером примером такого выходного результата. В изображении 214a два подозрительных объекта обозначены контрастирующим полутоновым оттенком в областях 215.
Следует заметить, что устройство 200 может быть осуществлено системой 20 посредством различных аппаратных и программных способов, как описано выше. Кроме того, хотя нейронные сети 208, 210 и 212 показаны последовательно, они дополнительно могут размещаться параллельно или в виде последовательно/параллельной комбинации, а также множеством других способов, как очевидно специалисту в данной области техники. Действительно, имеется много других структурных реализаций и систем, которые могут использоваться, чтобы реализовать процедуру 120, подпрограмму 170a, подпрограмму 170b и/или одну или более операций устройства 200.
Со ссылками на систему 20 из фиг.1 приемопередатчик 42 и процессор(ы) 44 включают в себя логику, которая может быть выполнена с возможностью выполнять различные операции, описанные здесь, включая те, что описаны со ссылками на процедуру 120, подпрограмму 170a, подпрограмму 170b, устройство 200 и/или их разновидности. Эта логика может иметь форму программных команд программного обеспечения, программно-аппаратного обеспечения и/или в форме аппаратуры, только несколько из которых названы. Кроме того, такая логика может быть в форме одного или более сигналов, которые хранятся памятью 46, R.М.D. 48, и/или одной или более частями компьютерной сети 70. В одном примере логические сигналы для выполнения одной или более операций передают на/в процессор(ы) 44 через сеть 70. Альтернативно или дополнительно программы для процессора(ов) 44 передаются или распространяются через R. М. D. 48 и/или одно или более других запоминающих устройств. Неограничивающие примеры других систем, которые могут реализовать операции процедуры 120, подпрограммы 170a, подпрограммы 170b, и/или устройства 200 (включая связанную логику), включают в себя те, что описаны со ссылками на фиг. 11-18, как следует ниже.
Фиг.11 и 12 иллюстрируют систему 220 согласно дополнительному варианту осуществления настоящего изобретения, которая может использоваться, чтобы выполнить процедуру 120, подпрограмму 170a, подпрограмму 170b и/или одну или более операций, описанных со ссылками на устройство 200. Система 220 облучает человека 222 выбранным электромагнитным излучением способом, описанным со ссылками на систему 20. Для системы 220 человек 222 носит предметы одежды, которые скрывают объект 225, показанный условно. Как и в вышеописанном варианте осуществления системы 20, система 220 может также использоваться, чтобы досматривать неодушевленные объекты. Система 220 включает в себя двухсекторные панели 238, определяющие сканирующий портал 230 в точке 231 проверки безопасности.
Система 220 также включает в себя станцию 250 управления/контроля, на которой обычно работает один или более операторов, и подсоединенную к панелям 238 портала 230. Станция 250 включает в себя подсистему 240 обработки. Подсистема 240 может быть сконфигурирована так же, как подсистема 40, вычисляя разности в сканирующих способах портала 230, как более полно описано ниже. Станция 250 также включает в себя одно или более операторских устройств ввода и вывода (не показаны), как описано со ссылками на систему 20, которые подсоединены к подсистеме 240. Портал 230 включает в себя стационарную платформу 232, размещаемую так, чтобы служить опорой человеку 222. Платформа 232 может быть сделана из материала, который является обычно прозрачным к излучению досмотра. Портал 230 также включает в себя решетку 236 и механизм 234 двигателя/привода для каждой из панелей 238. Решетка 236 содержится в стойке из элементов 38, как описано со ссылками на систему 20. Механизм 234 и решетки 236 механически подсоединены к друг другу и оперативно подсоединены к подсистеме 240. Под управлением подсистемы 240 механизм 234 двигателя/привода сконфигурирован для контролируемого перемещения каждой из решеток 236 по соответствующей траектории P1 или P2, как лучше всего проиллюстрировано на фиг.12. В частности, траектории P1 и P2 имеют непрямой, криволинейный тип, оборачивающийся вокруг оси Z. Ось Z представлена перекрестиями на фиг.12 и соответствует вертикальному направлению, как лучше всего проиллюстрировано на фиг.11. Соответственно решетки 236, каждая, следует по траектории, которая оборачивается вокруг области 239 досмотра, включающей в себя платформу 232 и человека 222, когда управляется соответствующим механизмом 234. Альтернативно или дополнительно одна или обе из траекторий P1 и P2 могут содержать по меньшей мере один прямой сегмент пути, подсоединенной к по меньшей мере одному другому сегменту траектории криволинейным или угловым способом. В другом варианте одна или более траекторий P1 и P2 состоят из множества прямых сегментов траектории, соединенных вместе от одного до следующего под наклонными углами, чтобы все вместе окружить часть области досмотра. В одном специфическом варианте этой конструкции сегменты траектории ориентированы так, чтобы аппроксимировать дугу или другую криволинейную форму. Далее, в то время как траектории P1 и P2 обычно имеют одинаковую длину и симметричны относительно оси Z, в других вариантах осуществления траектории P1 и P2 могут быть неодинаковой длины и/или могут быть несимметричны. В одном альтернативном варианте используются более двух панелей, решеток и соответствующих траекторий.
Механизм 234 может включать в себя электрический двигатель или другую управляемую главную схему перемещения, чтобы управлять перемещением конструкции для соответствующей решетки 236. Такая конструкция может включать в себя ременный привод, цепной диск, роликовый привод или такое другое механизированное соединение, которое очевидно для специалиста в данной области техники, чтобы выборочно переместить решетку 236. В других вариантах осуществления может использоваться единственная главная схема перемещения, к которой множество решеток 236 в различных панелях механически подсоединены вместе, чтобы двигаться в тандеме. В других вариантах осуществления может использоваться другая конструкция сканирования, чтобы передавать и/или принимать электромагнитную энергию требуемого диапазона.
В системе 220 подсистема 240 сконфигурирована так же, как подсистема 40 системы 20, и аналогично выполнена с возможностью выполнять процедуру 120, подпрограмму 170a, подпрограмму 170b и/или одну или более операций, описанных со ссылками на устройство 200; и может включать в себя один или более приемопередатчиков и/или коммутирующих дешифраторов, как необходимо. Однако работа подсистемы 240 не предусматривает досмотра полностью по окружности человека 220. Вместо этого досмотр выполняют по частичной окружности, меньшей 360°. Выполненный досмотр соответствует углам A1 и A2, стягиваемыми траекториями P1 и P2, по которым следуют решетки 236. В одном предпочтительном варианте осуществления углы A1 и A2, каждый, равен по меньшей мере 90°. В более предпочтительном варианте осуществления углы A1 и A2, каждый, равен 120° или меньше. В другом предпочтительном варианте осуществления углы A1 и A2 все вместе обеспечивают зону сканирования окружности по меньшей мере 240° относительно области 239. Система 220 может включать в себя один или более кодеров (не показаны), оперативно соединенных с системой 240 и/или другим устройствами/способами, чтобы отследить позицию решеток 236 относительно платформы 232. Система 220 может дополнительно включать в себя подсистему связи (не показана), такую же, как подсистема 60, чтобы удаленно обмениваться с подсистемой 240.
В одном конкретном варианте осуществления панели 238 имеют форму и сконфигурированы, чтобы вмещать соответствующую одну из решеток 236, которая каждая имеет приблизительно семь футов (213,4 см) в высоту, включает в себя 224 элемента 38 и работает в частотном диапазоне от 10 до 20 ГГц. Более конкретно каждая решетка 236 включает в себя две подрешетки из 112 элементов 38 каждая. Для каждой решетки 236 соответствующая пара подрешеток размещается каскадно. Эта конструкция использует два ультрашироких приемопередатчика и два соответствующих коммутирующих дешифратора, один для каждой из решеток 236, чтобы выборочно передавать одним элементом 38 и принимать другим элементом 38 в требуемой последовательности. Быстродействующий компьютер в подсистеме 240 управляет механизмами 234, решетками 236, приемопередатчиками и коммутирующими дешифраторами, чтобы получить топографические данные для обработки. Панели 238 противоположны друг другу, чтобы обеспечить угловой диапазон сканирования приблизительно 240° для такого расположения. В одном режиме работы этой системы обследуемый человек 222 входит по стрелке "ВХОД" в область 239 между панелями 238. Человек 222 затем поворачивается и обращается лицом к одной из панелей 238 на одну-две секунды, в то время как решетки 236 перемещаются по траекториям P1 и P2, чтобы выполнить сканирование. Человек 222 затем поворачивается и выходит по стрелке "ВЫХОД" после сканирования. Было найдено, что 240° охват, обеспеченный этим подходом, является подходящим для обнаружения большинства объектов, которые ставят под угрозу безопасность. Каждая панель 238 сделана по меньшей мере частично прозрачной, чтобы облегчить просмотр сквозь нее оператором в течение досмотра человека 222 в области 239.
Со ссылками на фиг.13, показаны изображения поперечного сечения манекена 222a, которые получены лабораторными экспериментами моделирования, выполненными в соответствии с настоящим изобретением. Такие изображения поперечного сечения облегчают обнаружение подозрительных объектов, в то же время снижая вероятность обеспечения изображений, к которым могут быть предъявлены претензии о личной тайне. Манекен 222a отображен во множестве видов в столбцах 260, 270 и 280, которые были взяты относительно различных секущих линий 255a, 255b и 255c манекена 222a. Изображения 260a, 270a и 280a поперечного сечения соответствуют секциям, взятым по секущей линии 255a и являются поперечными к оси Z. Аналогично изображения 260b, 270b, и 280b поперечного сечения соответствуют сечениям, взятым по секущей линии 255b и являются поперечными к оси Z. Далее, изображения 260c и 280c поперечного сечения соответствуют сечениям, взятым по секущей линии 255c и являются поперечными к оси Z. Каждое изображение 260a, 260b и 260c поперечного сечения, показанное в столбце 260, соответствует виду поперечного сечения вдоль оси Z, в котором не имеется никакого объекта, который несут, и в которых отображена полная 360° окружность. Изображения 270a и 270b стойки 270 также обеспечивают полные 360° круглые поперечные сечения и также изображают различные угрожающие предметы, скрытые одеждой. В частности, в изображении 270a поперечного сечения обнаружены маленький пистолет 235 и диэлектрическая пластина 235a. В изображении 270b поперечного сечения обнаружена ручная граната 235b. Изображения 280a, 280b и 280c стойки 280 каждое изображает 240° частичное представление окружности, соответствующее одной конструкции системы 220. В этой системе неполный охват (частичная окружность) все еще показывает ручную гранату 235d. Было найдено, что конструкция системы 220 с меньшей, чем 360° зоной, обеспечивает более быстрое сканирование и меньшее время обработки, которое может быть желательно в некоторых приложениях.
Для этого специфического экспериментального варианта системы 220 панели 238 используются в режиме FM/CW с качанием 10-20 ГГц за менее чем 20 микросекунд, чтобы обеспечить разрешающую способность изображения приблизительно 1 сантиметр и разрешающую способность интервала приблизительно 1,5 сантиметра. Во время операции этим способом решетка 236 каждая обеспечивается в форме двух вертикально ориентированных подрешеток, размещаемых каскадно. Одна подрешетка выделена для передачи, а другая для приема. В одном варианте каждая подрешетка изготовлена из 112 элементов типа щелевой антенны. Для каждой подрешетки элементы располагаются друг от друга на одинаковом расстоянии. Во время работы каждая подрешетка электронным образом сканируется поэлементно, когда сканер перемещается быстро по обычно горизонтальной траектории P1 или P2. Когда решетки движутся, множество сканирований выполняется только одним элементом, передающим в данный момент, и только одним принимающим отраженное электромагнитное излучение из-за такой передачи. Каждый передающий элемент и каждый принимающий элемент активизируются в соответствии с требуемой последовательностью в течение сканирования. Тем не менее, в других вариантах осуществления отличные количества, размеры или тип расположения линейной решетки могут использоваться, как очевидно специалистам в данной области техники. В других примерах различные типы вращающихся и/или линейных решеток сканирований могут использоваться отдельно или в комбинации. Далее, в качестве альтернативы или в добавление к изображениям поперечного сечения другие типы изображений и/или автоматических способов обнаружения скрытых объектов могут использоваться, как описано со ссылками на варианты осуществления на фиг. 1-10, для решения проблем личной тайны.
Фиг.14 и 15 иллюстрируют систему 320 другого варианта осуществления настоящего изобретения, которая может использоваться, чтобы выполнить процедуру 120, подпрограмму 170a, подпрограмму 170b и/или одну или более операций устройства 200, как описано со ссылками на фиг.10. Система 320 облучает человека 322 электромагнитным излучением способом, описанным со ссылками на систему 20. Для системы 320 человек 322 носит предметы одежды, которые скрывают объект 325, показанный условно. Как и в вышеописанных вариантах осуществления, система 320 может использоваться, чтобы также досматривать неодушевленные объекты. Система 320 включает в себя сканирующий портал 330 с двумя плоскими панелями и подсистему 340 обработки, включенную в станцию 350 управления/контроля. Портал 330 подсоединен к подсистеме 340 обработки и может быть сконфигурирован так же, как подсистема 40, вычисляющая разности в методике сканирования портала 330, как более полно описано ниже. Станция 350 включает в себя одно или более операторских устройств ввода и вывода, как описано со ссылками на систему 20, которые подсоединены к подсистеме 340. Станция 350 может быть выполнена с возможностью обеспечить соседний портал 330 с операторским интерфейсом пункта проверки безопасности.
Портал 330 включает в себя стационарную платформу 332, размещаемую так, чтобы служить опорой человеку 322 и дополнительной подсистеме 334 двигателя/привода. Под управлением подсистемы 340 подсистема 334 сконфигурирована для контролируемого перемещения каждой из двух решеток 336 по соответствующим направляющим стержням 337 "вверх и вниз" относительно вертикальной оси VA. Соответственно решетки 336, каждая, следует в общем по прямой линейной траектории с противоположных сторон человека 322, и каждая включена в соответствующую противоположную панель 338. Фиг.15 показывает одну из панелей 338 более подробно, используя частичное сечение. В системе 320 подсистема 340 сконфигурирована так же, как подсистема 40 системы 20, чтобы выполнить в общем те же самые операции, что описаны выше, и может включать в себя приемопередатчик и/или коммутирующий дешифратор, как необходимо. Однако в отличие от системы 20 работа подсистемы 340 вычисляет движения решетки 336 относительно человека 322 линейным поступательным образом вместо вращательного способа, как описано со ссылками на систему 20. Система 320 может включать в себя один или более кодеров (не показаны), оперативно подсоединенных к системе 340 и/или другим устройствам/способам, чтобы отследить позицию решеток 336 относительно платформы 332. Система 320 может дополнительно включать в себя подсистему связи (не показана), так же как подсистема 60, чтобы удаленно обмениваться с подсистемой 340.
В одном конкретном варианте осуществления панели 338 располагаются удаленно примерно на 1,22 метра и выполняется качание частоты в Ku-диапазоне приблизительно в 12,5-18 ГГц, чтобы обеспечить поперечную разрешающую способность приблизительно 1 сантиметр и разрешающую способность глубины приблизительно 2,7 сантиметра. Для этой конструкции каждая решетка 336 включает в себя две подрешетки приблизительно из 56 элементов каждая, которые размещаются каскадно. Одна подрешетка выделена для передачи и другая подрешетка выделена для приема в каждой решетке 336. В одном варианте каждая подрешетка изготовлена со щелевыми антеннами, удаленными друг от друга примерно на 2 сантиметра. Во время работы каждая подрешетка электронным образом сканирует поэлементно, когда сканер быстро перемещается по вертикали по высоте человека 322. Когда решетка движется, множество сканирований выполняется стойкой 336. В течение каждого сканирования только один элемент передающей подрешетки облучает человека и только один элемент принимающей подрешетки собирает отраженное электромагнитное излучение в любой заданный момент. Соответственно каждый передающий элемент и каждый принимающий элемент активизируются в соответствии с требуемой последовательностью во время сканирования. В конфигурации гетеродинного приемопередатчика FM/CW этой конструкции выполняют качание частоты в 5,5 ГГц приблизительно за 12,75 микросекунд. В одном варианте система 320 может не включать в себя формирование топографического представления и/или кадров в операции 162, так что проверка последовательности "кадр-за-кадром", описанная со ссылками на подпрограммы 170a и 170b, не выполняется. В других вариантах осуществления отличные количество, размер или тип конструкции линейной решетки могут использоваться, как очевидно для специалистов в данной области техники. В других примерах отличные типы вращающихся и/или линейных сканирующих решеток могут использоваться отдельно или в комбинации. Кроме того, система 320 может использоваться, чтобы сформировать одно или более видов поперечного сечения человека 322 и/или использовать один или более других подходов, описанных со ссылками на варианты осуществления на фиг. 1-10, чтобы решить проблемы личной тайны.
Фиг.16 иллюстрирует систему 420 досмотра из другого варианта осуществления настоящего изобретения. Система 420 облучает человека 422 выбранным электромагнитным излучением способом, описанным со ссылками на систему 20. Для системы 420 человек 422 носит предметы 424a и 424b одежды, которые скрывают объект 425. Как и в ранее описанных вариантах осуществления, система 420 также может использоваться, чтобы досматривать неодушевленные объекты.
Система 420 включает в себя кабину 430 сканирования, подсоединенную к подсистеме 440 обработки и управления. Сканирующая кабина 430 включает в себя стационарную платформу 432, способную служить опорой человеку 422, и раму 433, чтобы удерживать двигатель 434, подсоединенный к решетке 436. В отличие от вращения платформы портала 30 и поступательного движения, связанного с порталом 330, сканирующая кабина 430 выборочно вращает решетку 436 относительно оси R вращения и платформы 432 в течение досмотра. Для этой конструкции решетка 436 следует по обычно круговой траектории, чтобы обеспечить соответствующий воображаемый цилиндр относительно платформы 432. В одном варианте, подходящем для сканирования человека в стоящем положении, радиус этого цилиндра составляет приблизительно 1 метр. Иначе, решетка 436 сконфигурирована так же, как решетка 36.
В системе 420 подсистема 440 сконфигурирована так же, как подсистема 40 системы 20 и аналогично выполнена с возможностью выполнять процедуру 120, подпрограмму 170a, подпрограмму 170b и/или одну или более операций устройства 200 для обнаружения объектов, которые могут ставить под угрозу безопасность. Однако работа подсистемы 440 вычисляет движения решетки 436 относительно платформы 432 вместо движения платформы 32 относительно решетки 36, как для системы 20. Система 420 может включать в себя один или более кодеров (не показаны), оперативно подсоединенные к подсистеме 440 и/или другим устройствам/способам, чтобы отследить позицию решетки 436 относительно платформы 432. Система 420 может дополнительно включать в себя подсистему связи (не показана), так же как подсистема 60, чтобы удаленно обмениваться с подсистемой 440. Система 420 может использоваться, чтобы формировать один или более видов поперечного сечения человека 422 и/или использовать один или более других подходов, описанных со ссылками на варианты осуществления на фиг. 1-10, чтобы решить проблемы личной тайны.
Фиг.17 иллюстрирует систему досмотра 520 с электромагнитным облучением для еще одного варианта осуществления настоящего изобретения. Система 520 облучает человека 522 выбранным электромагнитным излучением, таким как описано выше. Для системы 520 человек 522 носит предметы одежды/одежду, обозначенные ссылочными позициями 524a и 524b, которые скрывают объект 525. Как и в ранее описанных вариантах осуществления, система 520 может использоваться, чтобы досматривать живые или неодушевленные объекты.
Система 520 включает в себя сканирующую кабину 530, соединенную с подсистемой 540 обработки и управления. Сканирующая кабина 530 включает в себя раму 533, способную принять человека 522, и удерживать решетку 536. В отличие от линейно ориентируемых решеток 36, 336 и 436 ранее описанных систем 20 и 420 решетка 536 размещается как кольцо или обруч, в общем центрированный относительно средней линии вертикальной оси CVA. Множество передающих/принимающих электромагнитное излучение элементов размещаются в общем по круговой траектории по кольцу. Эти элементы работают, чтобы досматривать человека 522 с помощью электромагнитного излучения, включающего в себя одну или более длин волн в миллиметровом, микроволновом и/или смежных диапазонах длин волн. Решетка 536 размещается для поступательного движения по оси CVA, чтобы сканировать человека 522, как представлено стрелкой T перемещения. Один или более двигателей или другой главной схемы перемещения (не показаны) используются, чтобы выборочно переместить решетку 536 вдоль оси CVA.
При обращении в дополнение к частичному виду сверху фиг.18 решетка 536 имеет размер в соответствии с отверстием 537, чтобы принять человека 522 через него, когда решетка 536 перемещается вверх и вниз вдоль оси CVA. На фиг.18 ось CVA в общем перпендикулярна плоскости представления и изображена перекрестиями. При вертикальном движении решетки 536 воображаемый цилиндр определен относительно человека 522 в соответствии с круговой траекторией, определенной кольцом решетки; однако ни человек 522 ни решетка 536 не вращаются один относительно другого, вместо этого поступательное движение решетки 536 используется, чтобы сканировать человека 522 вертикально.
Подсистема 540 конфигурирована так же, как подсистема 40, и действует, чтобы выполнить процедуру 120, подпрограмму 170a, подпрограмму 170b и/или одну или более операций устройства 200 за исключением того, что обработка подсистемы 540 приспособлена, чтобы вычислить вертикальное поступательное движение решетки 436 с ее окружающим расположением. Система 520 может дополнительно включать в себя подсистему связи (не показана), так же как подсистема 60, чтобы удаленно обмениваться с подсистемой 540. Подобно ранее описанным вариантам осуществления система 520 используется для обнаружения скрытых объектов, как описано со ссылками на процедуру 120.
По сравнению с стойкой 36 большее количество передающих/принимающих элементов обычно необходимо для решетки 536, чтобы иметь сопоставимую разрешающую способность с ранее описанными вариантами осуществления. В одном сравнительном неограничивающем примере от 500 до 2000 передающих/принимающих элементов было бы желательно для решетки 536 против от 200 до 600 для решетки 36 для сопоставимой разрешающей способности в зависимости от выбранного диапазона частот. Однако при соответствующих условиях сканирующая кабина 530 может выполнять сканирование существенно быстрее, чем портал 30. В одном неограничивающем примере время сканирования для портала 30 находится в диапазоне приблизительно от 10 до 20 секунд против приблизительно от 2 до 5 секунд для сканирующей кабины 530. Система 520 может использоваться, чтобы сформировать один или более видов поперечного сечения человека 522 и/или использовать один или более других подходов, описанных со ссылками на фиг. 1-10, чтобы решить проблемы личной тайны.
В дополнительном варианте осуществления настоящего изобретения и тело, проходящее досмотр, и решетка перемещаются оба. В одном таком примере элементы решетки размещаются в дуговом сегменте, который может двигаться вертикально, в то время как тело вращается. В других примерах и решетка и тело вращаются и/или двигаются поступательно. Обработка данных досмотра может быть откорректирована для этих различных схем движения, используя способы, известные специалистам в данной области техники.
Как описано со ссылками на систему 220, досмотр и соответствующая видеоинформация могут не соответствовать полной окружности тела, проходящего досмотр. Вместо этого сегмент, представляющий интерес, может быть меньше 360 градусов. Для таких вариантов осуществления видеоинформация может быть интерполирована, комбинируя данные, соответствующие двум или более различным углам представления. Альтернативно или дополнительно меньше чем полная высота, ширина, и/или длина предмета может быть отсканирована в других вариантах осуществления. Для таких альтернатив размер решетки и/или шаблон сканирования могут быть соответственно откорректированы.
В других вариантах осуществления настоящего изобретения данные изображения, собранные системой 20, 220, 320, 420 и/или 520, соответствуют множеству цилиндрических изображений без объединения некоторых или всех изображений вместе, чтобы обеспечить топографическое представление. Вместо этого цилиндрические изображения используются без объединения или только частично объединяемы. В других вариантах осуществления отображение может быть полностью или частично нецилиндрическим по природе со степенью объединения или без нее, чтобы обеспечить топографическое представление. В одном специфическом случае плоские панели системы 320 могут обеспечивать плоскую вместо цилиндрической видеоинформацию без множества кадров.
В одном дополнительном варианте осуществления видеоинформацию получают в соответствии с процедурой 120, подпрограммой 170a, подпрограммой 170b, устройством 200, системой 20, системой 220, системой 320, системой 420, и/или система 520 дополнительно используется, чтобы идентифицировать индивидуума. Одна форма этого варианта осуществления включает в себя методику для управления доступом к ограниченной области, включающую сканирование индивидуума, пытающегося получить доступ к ограниченной области; определение, скрывает ли индивидуум какие-либо объекты от сканирования; сравнение одного или более аспектов соответствующей видеоинформации относительно особенностей индивидуума с данными, сохраненными для тех, кому разрешен доступ к ограниченной области; и разрешение доступа индивидуума к ограниченной области, если имеется благоприятное сравнение и никакие подозрительные скрытые объекты не индицированы. Определение соответствия может использоваться, чтобы активизировать логический элемент или другое устройство управления доступом.
В другом варианте осуществления видеоинформация, собранная в соответствии с процедурой 120, подпрограммой 170a, подпрограммой 170b, устройством 200, системой 20, системой 220, системой 320, системой 420 и/или системой 520, дополнительно или альтернативно используется, чтобы идентифицировать личности, для которых доступ не может быть разрешен, типа подозреваемых преступников, известных террористов и т.п. В еще одной разновидности таких вариантов осуществления одни или более других биометрических данных (типа отпечатка пальца, отпечаток ладони, изображения сетчатки, образец голоса и т.д.) индивидуума сравнивают в дополнение к топографическим данным представления в качестве части определения того, разрешить ли доступ. Особенности, используемые для идентификации, могут быть изменены для каждого доступа, чтобы уменьшить вероятность, что будут обойдены меры управления доступом. Альтернативно или дополнительно может использоваться обнаружение объектов в соответствии с настоящим изобретением, чтобы определить, берет ли индивидуум объект из области без на то разрешения. Любой из этих вариантов осуществления можно обеспечивать как способ, устройство, систему и/или устройство.
Все публикации и патентная заявки, цитируемые в настоящем описании, здесь включены посредством ссылки, как будто каждая индивидуальная публикация или патентная заявка были конкретно и индивидуально обозначены, чтобы быть включенными по ссылке. Дополнительно любая теория, механизм операции, доказательства или сведения, заявленные здесь, как предполагается, дополнительно расширяют понимание настоящего изобретения и не предназначены, чтобы ограничить настоящее изобретение всегда такой теорией, механизмом операции, доказательством или сведениями. В то время как изобретение было проиллюстрировано и описано подробно на чертежах и в предшествующем описании, оно должно рассматриваться как иллюстративное и не ограничительное по характеру, а пониматься только в качестве выбранных вариантов осуществления, показанных и описанных, и требуется, чтобы все эквиваленты, изменения и модификации, которые попадают в объем изобретения, который определен в нем или нижеследующей формуле изобретения, были защищены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПРЕДМЕТОВ, СПРЯТАННЫХ ПОД ОДЕЖДОЙ НА ТЕЛЕ ЧЕЛОВЕКА | 2013 |
|
RU2522853C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ С САМОКОНТРОЛЕМ | 2020 |
|
RU2742803C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ СКРЫТЫХ ПРЕДМЕТОВ ПРИ ПЕРСОНАЛЬНОМ ДОСМОТРЕ | 2021 |
|
RU2785078C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ 3D ПОРТРЕТА ЧЕЛОВЕКА С ИЗМЕНЕННЫМ ОСВЕЩЕНИЕМ И ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ НЕГО | 2021 |
|
RU2757563C1 |
| ДЕТЕКТИРОВАНИЕ И ИДЕНТИФИКАЦИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИЯХ | 2020 |
|
RU2726185C1 |
| МЕТОД И СИСТЕМА ОБНАРУЖЕНИЯ НА ОСНОВЕ АКТИВНЫХ МИКРОВОЛН | 2014 |
|
RU2622618C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ МОБИЛЬНОСТЬЮ В СЕТЯХ БЕСПРОВОДНОЙ СВЯЗИ | 2021 |
|
RU2836817C2 |
| ДИСПЛЕЙ С УМЕНЬШЕНИЕМ ДИСКОМФОРТА ЗРЕНИЯ | 2015 |
|
RU2709389C2 |
| Способ увеличения эффективного времени накопления сигнала в системах досмотра, формирующих изображение скрытых предметов | 2015 |
|
RU2615516C1 |
| БЕСКОНТАКТНЫЙ ВВОД | 2013 |
|
RU2644520C2 |

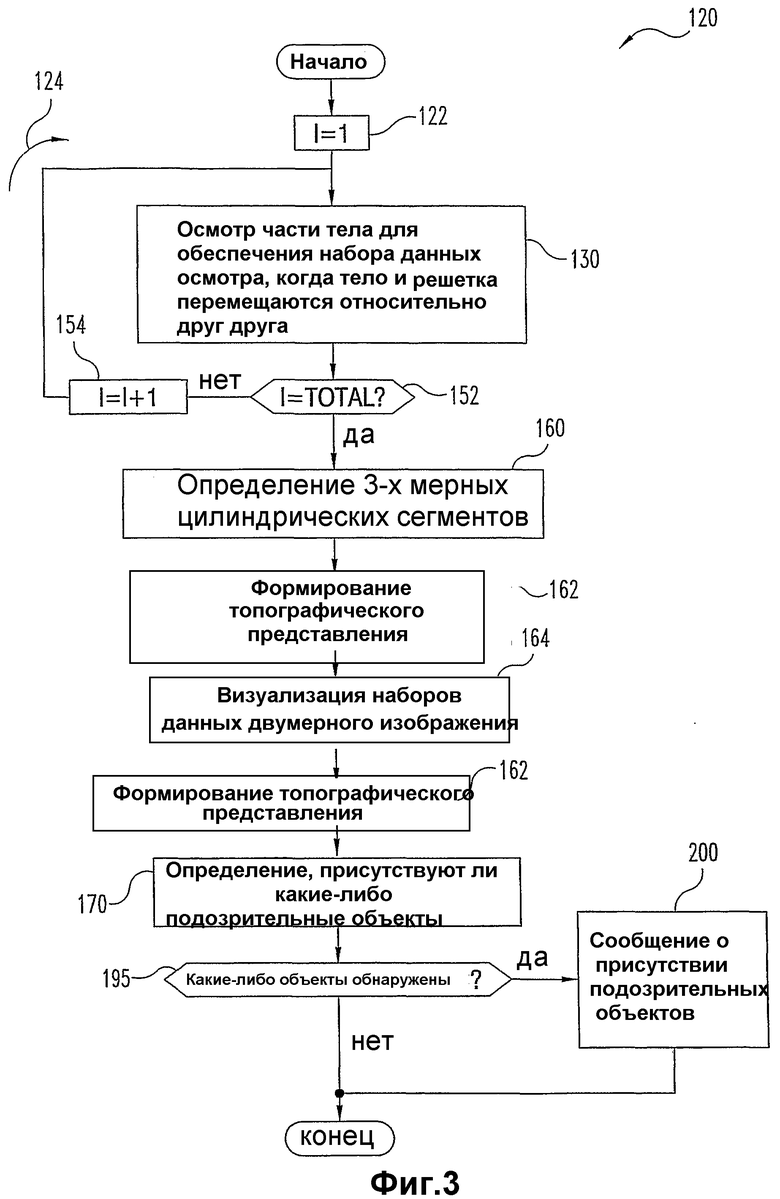
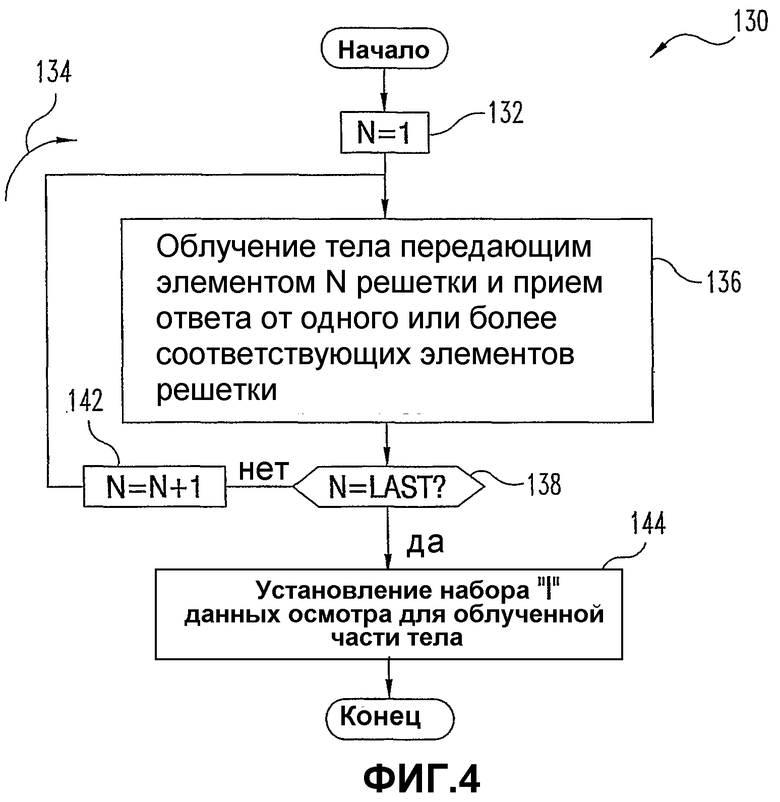


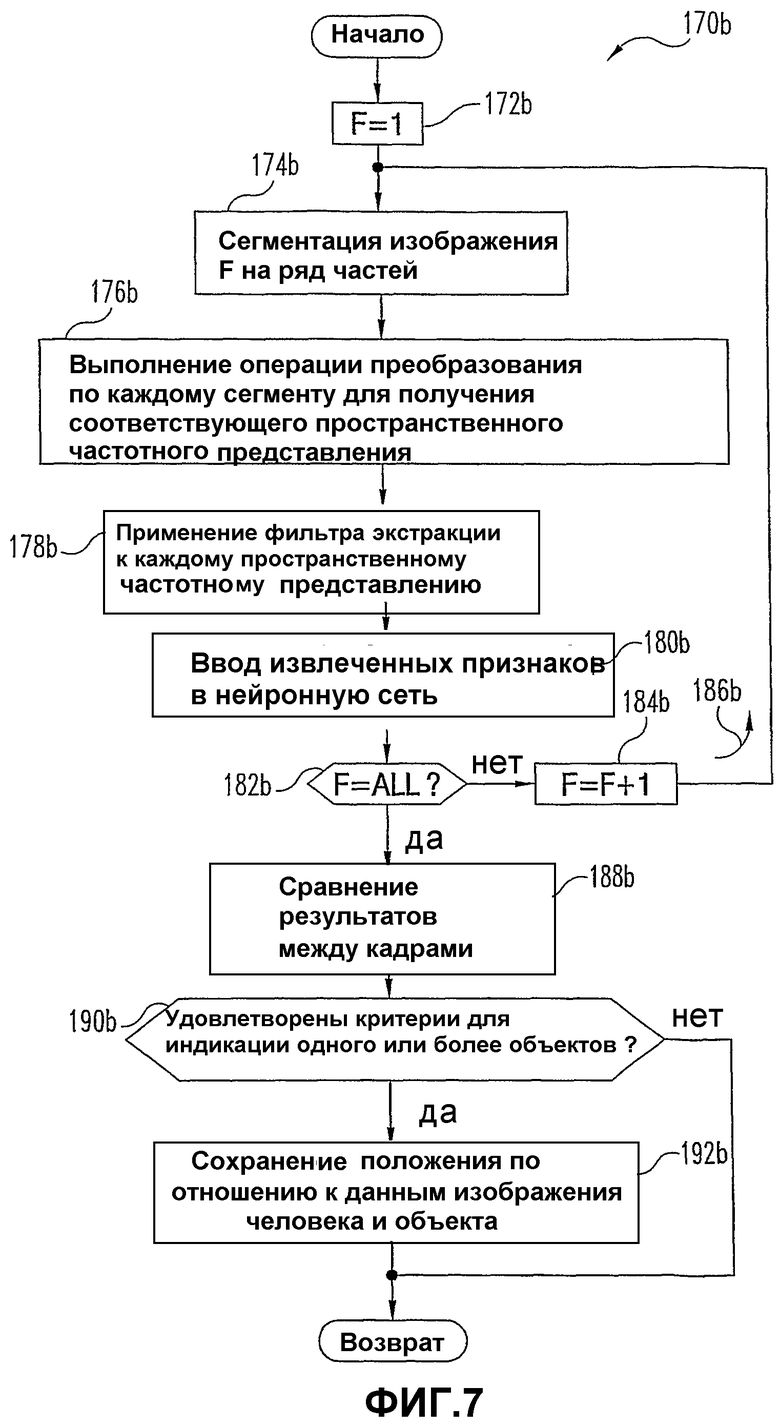
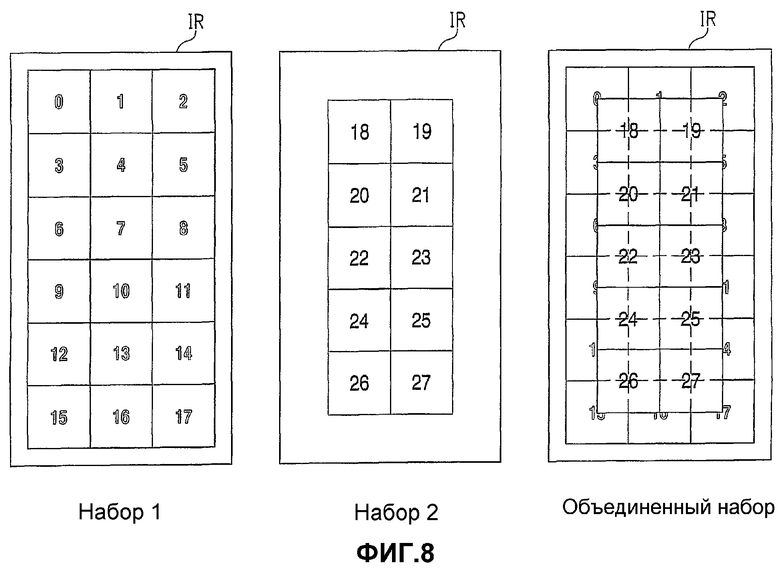


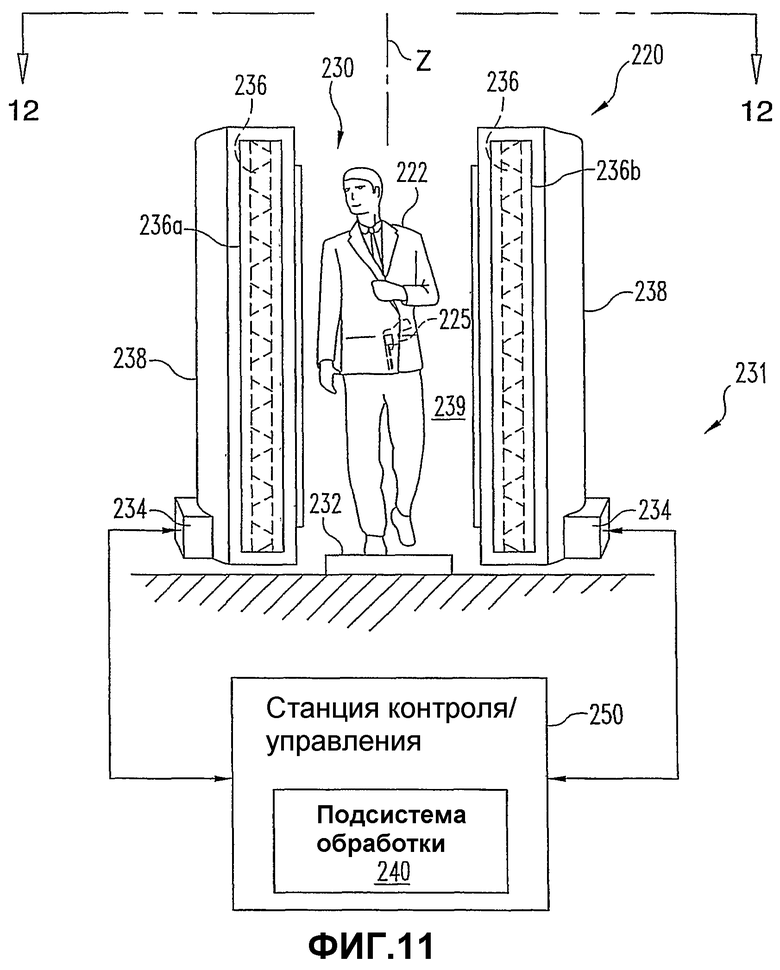
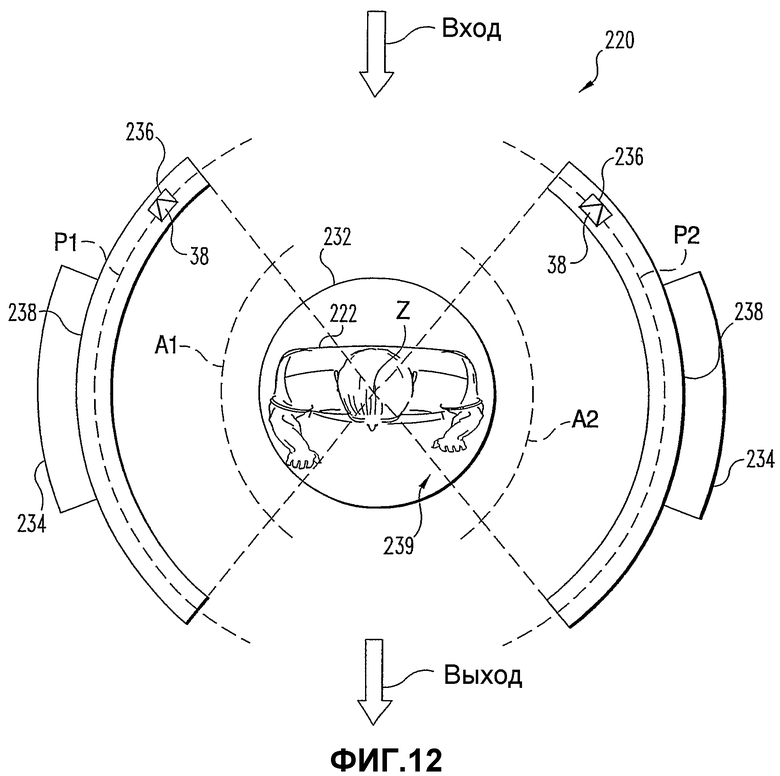
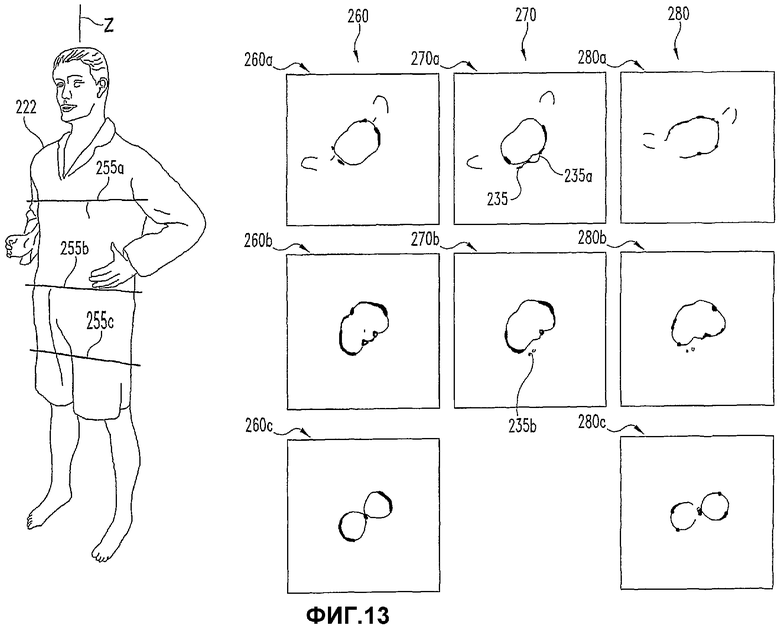



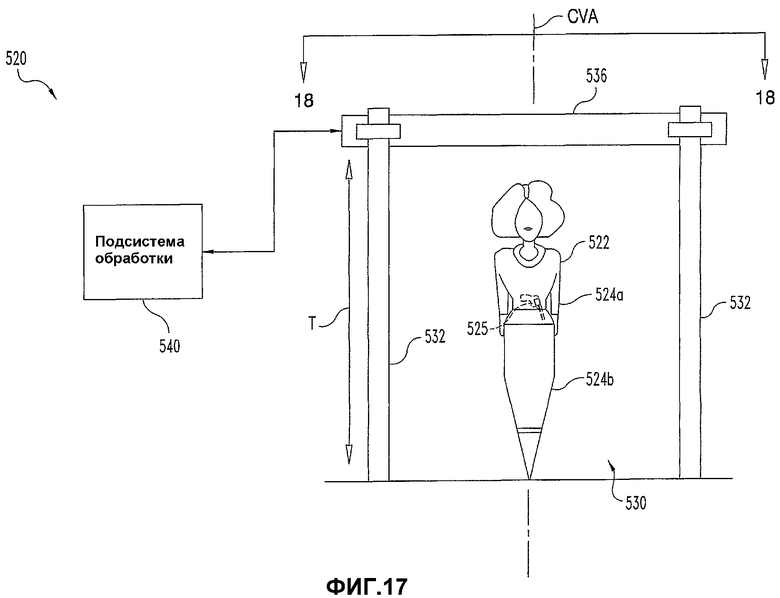
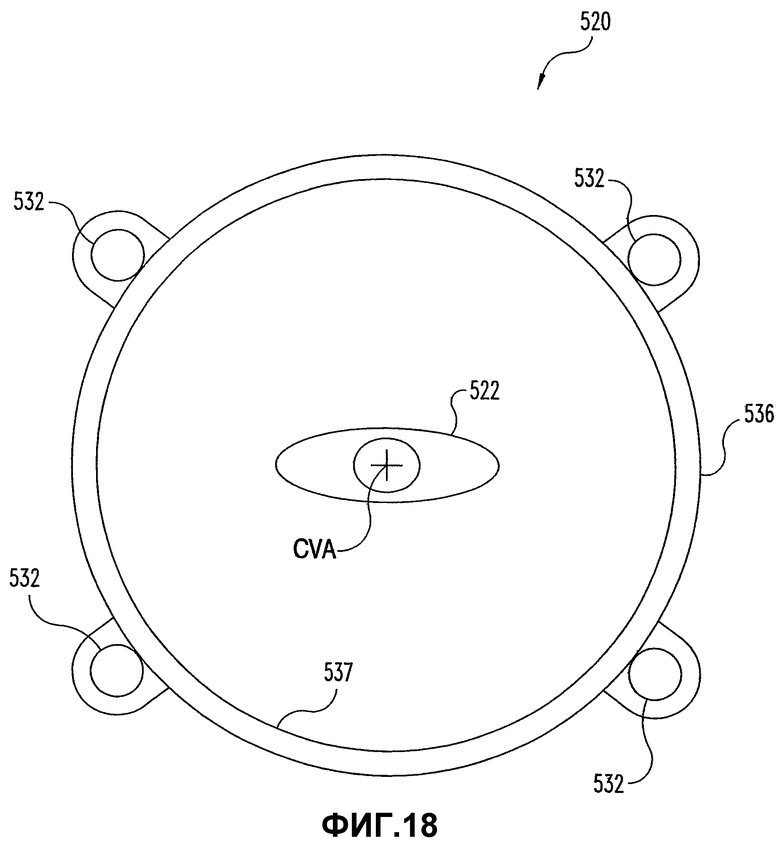
Изобретение предназначено для определения скрытого подозрительного объекта под одеждой индивидуума. Это определение включает в себя установление данных, соответствующих изображению индивидума, посредством досмотра с помощью электромагнитного излучения в диапазоне от 200 МГц до 1 ТГц. Данные изображения, соответствующие интенсивности отраженного излучения и разностной глубины отражающей поверхности, получают и обрабатывают для обнаружения подозрительного скрытого объекта. Достигаемым техническим результатом изобретения является обеспечение безопасности окружающих за счет обнаружения скрытых объектов, спрятанных индивидуумом под одеждой. 8 н. и 44 з.п. ф-лы, 18 ил.
1. Способ обнаружения скрытых объектов, содержащий этапы, на которых обнаруживают электромагнитное излучение, возвращаемое от скрытой поверхности, связанной с человеком, причем электромагнитное излучение включает в себя одну или более частот в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц; устанавливают данные, соответствующие интенсивности возвращаемого электромагнитного излучения вдоль поверхности и глубины вдоль поверхности; и адаптивно обрабатывают данные, чтобы определить, несет ли человек сделанный человеком объект, подозреваемый как являющийся одним или более из контрабанды или представляющий потенциальную угрозу безопасности, как функцию интенсивности вдоль поверхности и глубины вдоль поверхности.
2. Способ по п.1, в котором упомянутая адаптивная обработка оперирует с картой разности глубин поверхности, чтобы определить, несет ли человек сделанный человеком объект, как функцией глубины вдоль поверхности.
3. Способ по п.1, который включает в себя применение медианного фильтра и одного или более морфологических фильтров.
4. Способ по п.1, который включает в себя сравнение первого набора данных кадра изображения со вторым набором данных кадра изображения.
5. Способ по п.1, в котором объектом является по меньшей мере одно оружие.
6. Способ по п.1, который включает в себя этапы, на которых облучают человека электромагнитным излучением, выходящим из решетки преобразователей; и отображают относительное местоположение сделанного человеком объекта на изображении, представляющем человека.
7. Способ по п.1, в котором упомянутая адаптивная обработка выполняется для каждой из множества частей изображения, при этом части изображения каждая соответствует группе пикселей изображения.
8. Способ по п.7, в котором упомянутая адаптивная обработка дополнительно включает в себя этапы, на которых используют нейронную сеть, чтобы обработать каждую из частей изображения; для каждого из первого набора входов нейронной сети принимают входные данные интенсивности пикселя изображения в соответствии с пикселями изображения группы для соответствующих частей изображения; для каждого из второго набора входов нейронной сети принимают входные данные разности глубин от соответствующего одного из пикселей изображения обозначенной группы для одной из частей изображения и сравнивают выходной результат нейронной сети с порогом, чтобы определить, является ли объект подозрительным.
9. Способ обнаружения скрытых объектов, содержащий этапы, на которых: облучают область досмотра, включающую в себя человека, несущего скрытый объект; обнаруживают электромагнитное излучение, возвращаемое от области досмотра, в ответ на упомянутое облучение, причем электромагнитное излучение включает в себя одну или более частот в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц; устанавливают данные, представляющие карту интенсивности электромагнитного излучения, возвращаемого от области досмотра, и карту глубин вдоль области досмотра; и вводят данные в нейронную сеть, чтобы определить, является ли скрытый объект, по меньшей мере, одним из контрабанды или оружием, на основании карты интенсивности и карты глубин.
10. Способ по п.9, который включает в себя этапы, на которых применяют один или более морфологических фильтров, чтобы отобразить выходные данные нейронной сети; и сравнивают первые выходные данные изображения нейронной сети для первого кадра изображения со вторыми выходными данными изображения нейронной сети для второго кадра изображения.
11. Способ по п.9, который включает в себя этапы, на которых оценивают нейронную сеть каждой из ряда различных частей данных изображения, чтобы определить, присутствует ли скрытый объект, причем каждая часть данных изображения соответствует отличной группе пикселей изображения, при этом данные представляют карту интенсивности, соответствующую двумерной карте интенсивности пикселей изображения; вычисляют двумерную карту диапазона пикселей как функцию временной информации, определенной относительно упомянутого излучения и упомянутого обнаружения; и определяют данные, представляющие карту глубин, в соответствии с разностью глубин на основании двумерной карты диапазона пикселей.
12. Способ по п.9, который включает в себя отображение относительного местоположения скрытого объекта на изображении, представляющем человека.
13. Способ по п.9, в котором упомянутый досмотр включает в себя сканирование человека в портале в пункте проверки безопасности падающим электромагнитным излучением и упомянутое установление включает в себя формирование данных изображения, соответствующих ряду цилиндрических изображений.
14. Способ по п.9, в котором упомянутое установление включает в себя формирование информации, соответствующей одному или более цилиндрическим изображениям человека.
15. Система для обнаружения скрытых объектов, содержащая: решетку, выполненную с возможностью досмотра человека с помощью электромагнитного излучения на одной или более частотах в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц; и подсистему обработки, подсоединенную к решетке, причем подсистема обработки выполнена с возможностью обеспечивать нейронную сеть, включающую в себя первый набор входов и второй набор входов, причем первый набор входов предназначен, чтобы принимать данные, соответствующие карте интенсивности возвращаемого электромагнитного излучения вдоль поверхности под одеждой человека, второй набор входов предназначен, чтобы принимать другие данные, соответствующие карте глубин вдоль поверхности, при этом нейронная сеть служит для оценки, скрыты ли человеком один или более объектов, подозреваемых как являющиеся по меньшей мере одним из контрабанды или представляющие потенциальную угрозу безопасности, как функции карты интенсивности и карты глубин, и обеспечивает одни или более соответствующих выходных данных.
16. Система по п.15, в которой нейронная сеть имеет многоуровневый перцептронный тип.
17. Система по п.15, в которой карта глубин представляет разность глубин и подсистема обработки включает в себя средство для определения карты глубин из карты информации о диапазоне.
18. Система по п.15, дополнительно содержащая устройство отображения, реагирующее на одни или более выходных данных, чтобы обеспечить по меньшей мере одно изображение, если указано присутствие одного или более объектов.
19. Система по п.15, в котором подсистема обработки включает в себя средства для фильтрации видеоинформации.
20. Система по п.15, дополнительно содержащая платформу вблизи упомянутой решетки, чтобы служить опорой человеку, и двигатель, чтобы перемещать по меньшей мере одно из решетки и платформы относительно другой из решетки и платформы, чтобы выполнить сканирование человека в пункте проверки безопасности для целей безопасности.
21. Система по п.15, в которой подсистема обработки дополнительно выполнена с возможностью формировать данные изображения, соответствующие множеству цилиндрических изображений человека.
22. Устройство для обнаружения скрытых объектов, содержащее устройство, имеющее логику, выполняемую одним или более процессорами, чтобы анализировать данные, соответствующие изображению человека, полученному из электромагнитного излучения, включающего в себя одну или более частот в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц, причем данные представляют карту интенсивности электромагнитного излучения и карту глубин, определенные по отношению к человеку, причем логика дополнительно выполнена с возможностью выполнять адаптивный процесс с данными, чтобы оценить, скрывается ли человеком один или более объектов, подозреваемых как являющиеся по меньшей мере одним из контрабанды или представляющие потенциальную угрозу безопасности, как функции карты интенсивности электромагнитного излучения и карты глубин, и обеспечивает выходные данные, указывающие обнаружение одного или более объектов, если указано адаптивным процессом.
23. Устройство по п.22, в котором устройство выполнено в форме считываемой процессором памяти и логика выполнена в форме множества команд, сохраненных в памяти.
24. Устройство по п.22, в котором устройство включает в себя одну или более частей компьютерной сети и логика закодирована в одном или более сигналов для передачи по компьютерной сети.
25. Устройство по п.22, в котором логика дополнительно выполнена с возможностью определить карту глубин как карту разности глубин.
26. Устройство по п.25, в котором логика определяет по меньшей мере одну нейронную сеть.
27. Устройство по п.26, в котором логика определяет средство для фильтрации информации о пикселях изображения.
28. Система для обнаружения скрытых объектов, содержащая две или более антенных решеток, удаленных друг от друга, чтобы определить область досмотра между ними, каждая решетка выполнена с возможностью окружать область досмотра и досматривать человека в области досмотра с помощью электромагнитного излучения на одной или более частотах в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц и тем самым формировать соответствующие сигналы запроса; и один или более процессоров, соединенных с антенными решетками и выполненных с возможностью устанавливать данные, соответствующие топографическому представлению человека, определенному из сигналов запроса, и генерировать выходные данные как функцию данных, причем устройство отображения реагирует на выходные данные, чтобы обеспечить индикацию оператору, если человек подозревается в ношении одного или более скрытых объектов, которые ставят под угрозу безопасность.
29. Система по п.28, в которой каждая решетка снабжена панелью и механизмом, чтобы перемещать соответствующую одну из решеток по криволинейной траектории относительно области досмотра.
30. Система по п.29, в которой криволинейная траектория аппроксимирует дугу окружности.
31. Система по п.29, в которой панель для каждой из решеток является по меньшей мере частично прозрачной, чтобы облегчить осмотр оператором сквозь нее.
32. Система по п.28, в которой один или более процессоров включают в себя средство для формирования одного или более поперечных сечений человека для вывода на устройство отображения.
33. Система по п.28, в которой каждая решетка выполнена с возможностью работать на нескольких различных частотах и каждая соответствует дуге вокруг области досмотра, стягивающей угол по меньшей мере 120°.
34. Способ обнаружения скрытых объектов, содержащий этапы, на которых эксплуатируют две или более антенных решеток для окружения человека, расположенного между решетками, и тем самым осуществляют досмотр человека с помощью электромагнитного излучения на одной или более частотах в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц и формируют множество наборов данных изображения исходя из досмотра; и формируют объемные данные комбинированием множества наборов данных изображения, причем объемные данные отображают поверхность человека.
35. Способ по п.34, который включает в себя перемещение каждой из решеток по траектории, расположенной вокруг человека.
36. Способ по п.35, в котором по меньшей мере часть траектории является криволинейной и траектория стягивает угол по меньшей мере 120° относительно человека.
37. Способ по п.35, в котором по меньшей мере часть траектории является прямолинейной.
38. Способ по п.34, который включает в себя отображение одного или более поперечных сечений человека на основании объемных данных.
39. Способ по п.34, который включает в себя формирование топографических данных изображения из данных цилиндрического изображения.
40. Способ по п.34, в котором решетки расположены напротив друг друга, чтобы определить область досмотра между ними, и выполнены с возможностью обеспечить пункт проверки безопасности.
41. Способ обнаружения скрытых объектов, содержащий этапы, на которых: генерируют электромагнитное излучение на одной или более частотах в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц двумя или более решетками для выполнения досмотра человека, расположенного между двумя или более решетками; перемещают по меньшей мере одну из решеток вдоль непрямой траектории относительно человека в течение досмотра и формируют объемные данные исходя из досмотра, чтобы обнаружить, скрывает ли человек объект, причем этап формирования объемных данных объединяет множество наборов данных цилиндрического изображения.
42. Способ по п.41, в котором траектория стягивает угол по меньшей мере 90° относительно человека.
43. Способ по п.41, в котором траектория стягивает угол по меньшей мере 120° относительно человека.
44. Способ по п.41, в котором количество решеток равно двум и они расположены напротив друг друга, чтобы определить область досмотра между ними, и выполнены с возможностью обеспечить пункт проверки безопасности, и по меньшей мере часть траектории является криволинейной или прямолинейной.
45. Способ по п.41, который включает в себя отображение одного или более поперечных сечений человека на основании объемных данных.
46. Способ по п.41, который включает в себя формирование топографических данных изображения из множества наборов данных цилиндрического изображения.
47. Способ обнаружения скрытых объектов, содержащий этапы, на которых: осуществляют досмотр человека с помощью электромагнитного излучения, включающего в себя одну или более частот в диапазоне приблизительно от 200 МГц до приблизительно 1 ТГц; формируют одно или более изображений поперечного сечения человека на основании досмотра и определяют, несет ли человек скрытый объект, который ставит под угрозу безопасность, из по меньшей мере одного или более изображений поперечного сечения.
48. Способ по п.47, в котором упомянутое формирование включает в себя обеспечение одного или более изображений поперечного сечения из ряда наборов данных, причем каждый соответствует различному цилиндрическому изображению человека.
49. Способ по п.47, в котором упомянутое выполнение включает в себя перемещение пары противостоящих решеток вокруг человека по непрямой траектории.
50. Способ по п.49, в котором непрямая траектория стягивает угол по меньшей мере 90°.
51. Способ по п.49, в котором каждая решетка выполнена с возможностью обеспечить электромагнитное излучение на множестве различных частот.
52. Способ по п.47, в котором упомянутое определение включает в себя отображение для оператора одного или более изображений поперечного сечения.
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ ПРЕДМЕТОВ, СКРЫТЫХ ПОД ОДЕЖДОЙ ЛЮДЕЙ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2133971C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЖИВЫХ ОРГАНИЗМОВ | 1995 |
|
RU2162235C2 |
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |
| УСТРОЙСТВО ДЛЯ ВВОДА И СРАВНЕНИЯ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 1993 |
|
RU2096922C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОРУЖИЯ И ВЗРЫВЧАТЫХ ВЕЩЕСТВ В КОНТРОЛИРУЕМЫХ ПРЕДМЕТАХ | 1992 |
|
RU2065156C1 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1995 |
|
RU2116671C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2094821C1 |
| US 5859609, 12.01.1999 | |||
| US 6359582, 19.03.2002 | |||
| US 6057761, 02.05.2000. | |||

