Область техники
Изобретение относится к реверсивному линейному приводу, имеющему, по меньшей мере, одну обмотку возбуждения, в которую подается изменяющийся ток; магнитный якорь, совершающий под действием магнитного поля обмотки возбуждения линейное колебательное движение в осевом направлении с длиной хода якоря; а также средства для определения положения якоря.
Уровень техники
Соответствующий линейный привод известен из JP 2002-031054 А.
Такие линейные приводы используются в частности для обеспечения линейного колебательного движения поршней компрессоров. Система, состоящая из такого компрессора и линейного привода, называется поэтому также линейным компрессором (ср. вышеупомянутый документ JP-A). В соответствующих известных линейных компрессорах подвешенный, по меньшей мере, через один пружинный элемент якорь представляет собой колебательную инерционную систему, рассчитанную на определенную частоту колебаний. При этом компрессор со своей характеристикой «сила-путь» также действует некоторым образом подобно пружине, как бы параллельно подключенной к используемой пружине и, тем самым, также влияет на частоту собственных колебаний системы.
Для управления положением якоря таких реверсивных линейных приводов часто желательна как можно более точная регистрация фактического, т.е. действительного положения якоря. Для этого до сих пор положение якоря могло регистрироваться дискретными способами, например, посредством замыкания электрического контакта при достижении якорем определенного положения. Известен также непрерывный способ измерения положения, например с помощью напряжения, индуцируемого в обмотке возбуждения. Однако такие способы определения положения якоря отличаются сравнительно невысокой точностью.
Раскрытие изобретения
Задача настоящего изобретения состоит поэтому в том, чтобы создать такой реверсивный линейный привод с перечисленными выше признаками, который позволяет осуществить определение фактического положения якоря с высоким 5 разрешением.
Эта задача решена признаками, перечисленными в пункте 1 формулы изобретения. В соответствии с этим реверсивный линейный привод с упомянутыми выше признаками выполнен так, что его средства, предназначенные, по меньшей мере, для определения положения якоря, имеют размещенный, по меньшей мере, по всей длине осевого хода якоря элемент со штриховым рисунком с чередующимся расположением светопроницаемых и светонепроницаемых полос, или светоотражающих и не светоотражающих полос, а также, по меньшей мере, одну фотоячейку с испускающими свет и воспринимающими свет частями, световые лучи которой были бы направлены, по меньшей мере, приблизительно перпендикулярно к осевому направлению и к элементу со штриховым рисунком.
Преимущества, связанные с таким исполнением линейного привода, состоят главным образом в том, что можно очень точно и очень дешево, с применением известных фотоячеек измерять положение якоря и/или, измеряя положение и время, определять его скорость. К тому же печатное изготовление элемента со штриховым рисунком, например, наподобие штрих-кода, может быть выполнено дешево и с достаточной точностью. Точное и непрерывное измерение положения якоря позволяет более точно регулировать положение якоря, в частности, линейного компрессора и, таким образом, способствует повышению КПД такого компрессора. Кроме того, измерение положения позволяет увеличить допуски при изготовлении, так как абсолютное положение верхней мертвой точки хода якоря относительно опорной метки может быть измерено с минимальными дополнительными издержками и, например, заложено в систему регулирования двигателя.
Предпочтительные модификации предлагаемого в изобретении линейного привода вытекают из зависимых пунктов формулы изобретения. При этом признаки пункта 1 могут сочетаться с признаками одного или даже нескольких зависимых пунктов. Таким образом, для линейного привода могут быть дополнительно предусмотрены еще следующие признаки.
Элемент со штриховым рисунком целесообразно жестко соединить с якорем. В соответствующих случаях можно также, чтобы, по меньшей мере, одна фотоячейка была подвижно соединена с якорем.
Кроме того, целесообразно, чтобы фотоячейка была выполнена как сдвоенная. Такая фотоячейка обеспечивает вдвое более точное разрешение при определении положения и простое определение изменения направления движения якоря.
Далее, светопроницаемые полосы и светонепроницаемые полосы, или светоотражающие и не светоотражающие полосы могут иметь одинаковые размеры в осевом направлении. Однако в соответствующих случаях возможны также и неодинаковые, и даже изменяющиеся в зависимости от положения вдоль оси размеры отдельных полос.
Кроме того, или при этом, размер светопроницаемых и/или светонепроницаемых, а также светоотражающих и/или не светоотражающих полос в осевом направлении может быть менее 0,25 мм.
Элемент со штриховым рисунком может быть выполнен в виде гребня.
Особенно предпочтительно, если штриховой рисунок будет содержать дополнительно, по меньшей мере, одну отдельно воспринимаемую полосу запуска. Эта полоса запуска может восприниматься либо имеющейся фотоячейкой, которая воспринимает и другие полосы, либо для ее регистрации может быть предусмотрена отдельная (одинарная) фотоячейка. С помощью такой полосы запуска можно в частности производить калибровку абсолютного положения якоря.
Разумеется, кроме средств для определения положения якоря могут быть предусмотрены и дополнительные средства для определения его скорости и/или направления движения.
Краткий перечень фигур чертежей
Прочие предпочтительные модификации предлагаемого изобретением линейного привода вытекают из не упомянутых выше зависимых пунктов и чертежей.
Ниже изобретение описывается подробнее с помощью предпочтительных примеров реализации со ссылками на чертежи. На чертежах представлены:
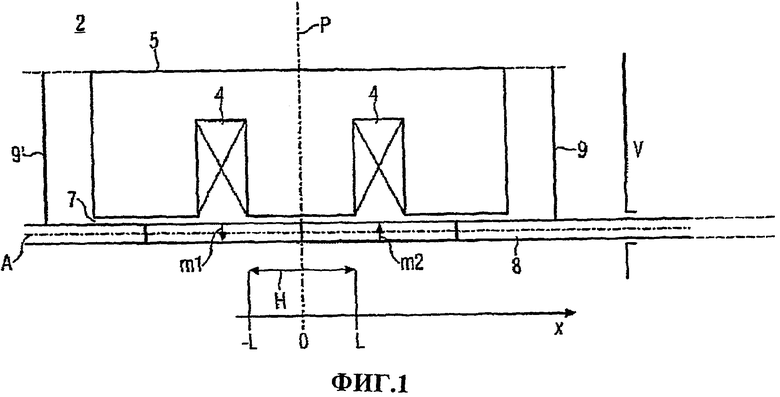
на Фигуре 1 - разрез части предлагаемого изобретением реверсивного линейного привода,
на Фигуре 2 и 3 - две модификации сдвоенной фотоячейки для такого привода,
на Фигуре 4 - примерный график измерения положения якоря в функции времени с применением соответствующей сдвоенной фотоячейки
на Фигуре 5 - примерный график измерения скорости якоря в функции времени такой сдвоенной фотоячейкой.
Соответствующие элементы на фигурах обозначены одинаковыми номерами.
Осуществление изобретения
В основе представленного на фиг.1 реверсивного линейного привода согласно изобретению лежит известный сам по себе конструктивный вариант, применяемый для линейных компрессоров (ср. вышеупомянутый документ JP-A). На чертеже в основном схематически показана лишь верхняя часть сечения такого линейного привода 2; т.е. на чертеже изображены лишь те детали, которые лежат по одну сторону от оси или плоскости А, проходящей в направлении осевых колебаний. Другие, не изображенные части сами по себе известны. Линейный привод 2 имеет, по меньшей мере, одну обмотку 4 возбуждения, к которой относится, по меньшей мере, один сердечник 5, проводящий магнитный поток. В центральном щелевидном зазоре 7 под этим сердечником расположен магнитный якорь 8, например с двумя аксиально расположенными друг за другом постоянными магнитами. Направления их намагниченности обозначены стрелками m1 и m2. Якорь, называемый также "якорными салазками", имеет направленные вдоль оси, не рассматриваемые более подробно, удлинители. Он может совершать в переменном магнитном поле обмотки 4 колебательное движение в осевом направлении, например относительно положения (метки) Р. В изображении на чертеже с целью упрощения предполагается, что колебание относительно положения Р происходит так, что максимальное отклонение от этого положения в осевом направлении x, т.е. амплитуду колебания можно обозначить +L и -L. Соответственно длина хода якоря 8 должна составить |2L|. При этом, однако, следует учесть, что это положение Р не обязательно неподвижно. В особенности, в неустановившемся режиме положение Р может существенно отличаться от принятого для движения якоря при нормальных условиях. Это значит, что колебание якоря, в общем, не все время симметрично относительно положения Р. Если же считать положение Р стационарным, то соответствующие положительные и отрицательные составляющие хода якоря не всегда будут одинаковы.
Как показано далее на фиг.1, в представленном варианте исполнения две неподвижно закрепленные плоские пружины 9 и 9' с обеих сторон положения Р могут касаться удлинителей якоря 8. Далее целесообразно, чтобы, по меньшей мере, с одной стороны удлинителя якоря 8 он был жестко связан с поршнем не изображенного на фигуре подробнее компрессора V.
На фиг.2 показан якорь 8 предлагаемого в изобретении линейного привода с двумя постоянными магнитами РМ1 и РМ2. На якоре расположен наподобие "наездника" элемент 10 со штриховым рисунком в виде гребня фотоячейки, какой применяется, например в линейных оптических датчиках (ср. книгу "Linear Synchronous Motors: Transportation and Automation Systems", авторы G.F.Gieras & Z.J.Piech, CRC Press, USA, 2000, стр.149-167). Элемент 10 со штриховым рисунком состоит из расположенных в осевом направлении друг за другом чередующихся светонепроницаемых штриховых полос 11i и соответствующих светопроницаемых штриховых полос 12i, которые предпочтительно все имеют одинаковый размер в осевом направлении, т.е. ширину, желательно не более 0,25 мм. Для наглядности на чертеже полосы 11i изображены черными линиями, а лежащие между ними светопроницаемые полосы 12i светлыми промежутками. Желательно, чтобы участок, состоящий из светопроницаемых и светонепроницаемых полос, перекрывал, по меньшей мере, всю длину фактического аксиального хода Н якоря 8.
Гребень фотоячейки может представлять собой механический элемент зубчатой формы из светонепроницаемого материала. В альтернативном варианте он делается из светопроницаемого материала, на котором напечатан светонепроницаемый штриховой рисунок. Если якорные салазки сами состоят из светопроницаемого материала (например из стеклопластика, который пропускает инфракрасное излучение), то гребень фотоячейки может быть получен прямой печатью на материале салазок.
Гребень 10 фотоячейки, который движется вместе с якорем 8, проходит мимо неподвижной стационарно установленной трансмиссионной фотоячейки 14, перемежающийся сигнал которой через известную длину периода (равную ширине двух соседних полос, из которых одна светопроницаема, а другая светонепроницаема) гребня фотоячейки позволяет осуществить измерение положения. В данном примере выбрана сдвоенная фотоячейка, хотя может быть применена и одинарная фотоячейка. Сдвоенная фотоячейка обеспечивает вдвое более точное разрешение при определении положения и позволяет определить изменение направления движения якоря. Однако и с помощью одинарной фотоячейки можно получить соответствующие значения, например, с помощью более тонкого штрихового рисунка и измерения индуцированного движением якоря напряжения в обмотке возбуждения, которое при повороте якоря равно нулю. Оба световых луча выбранной трансмиссионной сдвоенной фотоячейки 14 направлены перпендикулярно относительно осевого направления и элемента 10 со штриховым рисунком. Предпочтительно, чтобы оба ее элемента 16а и 16b были при этом так расположены в осевом направлении, чтобы шаг их растра не был таким же, как у соседних светопроницаемых полос 12i, а чтобы расстояние между их серединами было больше расстояния между соседними полосами. Пространственное разрешение сдвоенной фотоячейки составляет около 1/4 длины периода гребня фотоячейки. Кроме того, сдвоенная фотоячейка позволяет определить изменение направления движения якоря.
В переходе между светлым и темным содержится дополнительная информация. Посредством вычитания или сложения обоих сигналов фотоячейки наряду с 90°-сигналами образуются еще 45°-сигналы, благодаря чему разрешение удается повысить до 1/8 длины периода. Для этого, да и по другим причинам, длина периода штрихового рисунка должна быть согласована с расстоянием в осевом направлении между обоими коллекторами сдвоенной фотоячейки.
К предложенному в качестве конструктивного варианта элемента 10 со штриховым рисунком гребню фотоячейки полезно добавить, по меньшей мере, одну полоску 17 сигнала запуска, например в виде удлиненного штриха. Эту полоску предпочтительно разместить в таком месте, где скорость якоря близка к максимальной. Сигнал запуска, соответствующий известному положению, служит в первую очередь для калибровки измерения координат места, которую желательно выполнять во время каждой полуволны колебания якоря. Кроме того, сигнал запуска, как таковой, может быть успешно применен в алгоритме регулирования положения якоря.
Благодаря целесообразному расположению с полуперекрытием сдвоенной фотоячейки 14 по фиг.2 сдвоенная фотоячейка может непосредственно использоваться для обработки сигнала запуска. Так как, например, геометрическая высота пар светодиод-фототранзистор трансмиссионной сдвоенной фотоячейки 14 выбирается большей, чем их ширина, а по вертикали они располагаются так, что нормальный гребень фотоячейки без полосы 17 запуска перекрывается только приблизительно наполовину, то по амплитуде сигнала, который выдает сдвоенная фотоячейка, можно обнаружить прохождение полосы сигнала запуска.
Сигнал запуска требуется обязательно только во время запуска двигателя. Поэтому в удешевленном варианте для распознавания сигнала запуска используется, например сигнальный вход АЦП, который в начале запуска еще не очень нужен, например АЦП-вход датчика тока.
В альтернативном варианте опорная метка располагается вне нормального рабочего диапазона. По однократному переходу за нормальный диапазон при запуске можно с помощью тех же датчиков определить абсолютное положение якоря.
В качестве опорных методов могут быть также использованы независимые методы измерения, например, измерение электрического контакта при касании опорной метки. В этом случае при определенных условиях от описанного выше оптического сигнала запуска можно отказаться. Если соответствующая опорная метка будет отнесена к верхнему или нижнему упору или к мертвой точке нагрузки, например поршня компрессора, то можно откалибровать координатные системы нагрузки, а, тем самым, и якоря.
Гребень фотоячейки может быть выполнен и не эквидистантным, с максимальным пространственным разрешением вблизи точек поворота якоря и с меньшим разрешением в области максимальной скорости якоря.
Путем дифференцирования по времени измеренного с помощью фотоячейки положения якоря можно определить его скорость.
В альтернативном варианте вместо этого трансмиссионного метода может быть применен отражательный метод. Для этого элемент со штриховым рисунком должен быть оснащен отражающими и поглощающими линиями. Отражательный метод имеет то преимущество, что штриховые рисунки могут быть нанесены на противолежащих боковых сторонах якоря или связанного с ним носителя, причем они при определенных условиях могут быть даже различными в отношении ширины полос и их расположения.
Это не только позволяет повысить точность измерения; одна сторона может быть использована также для опорного измерения.
Во время запуска при выравнивании давлений механически связанного с линейным приводом компрессора можно с помощью специального регулирования сделать "мягкими" упор поршня этого компрессора и обратный упор на стороне, противоположной поршню. Стороны, противоположной поршню, привод может достичь при всех эксплуатационных режимах, и она, таким образом, может быть использована в качестве не зависящего от эксплуатационного состояния опорного сигнала при пуске.
Элемент со штриховыми рисунками с обработкой может быть использован также при изготовлении привода для измерений механических допусков в направлении движения, а также для функциональных проверок, например для измерения длины хода, измерения упоров, а в соответствующих случаях, при перемещении под действием внешнего усилия.
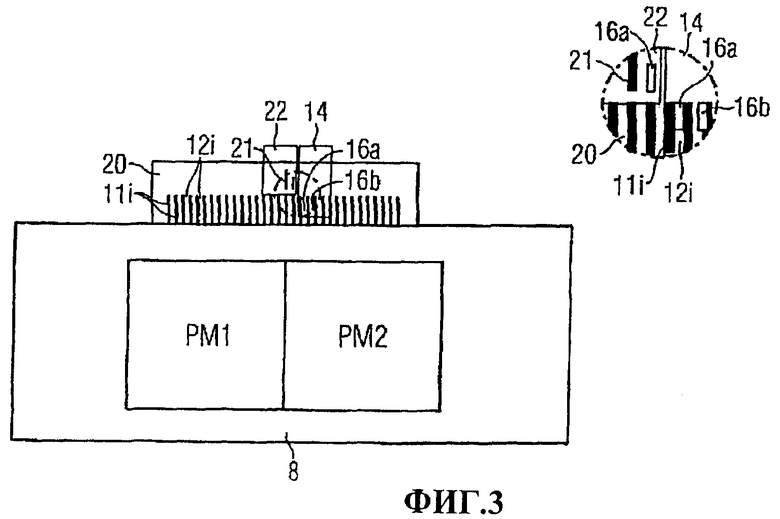
Вариант исполнения якоря 8 с элементом со штриховым рисунком и со сдвоенной фотоячейкой на фиг.3 отличается от варианта, изображенного на фиг.2, главным образом тем, что применяется трансмиссионная сдвоенная фотоячейка 14, которая полностью перекрывается нормальным гребнем фотоячейки элемента 20 со штриховым рисунком без полосы запуска. Вызываемый полосой запуска 21 сигнал запуска воспринимается в этом случае дополнительной трансмиссионной одинарной фотоячейкой 22.
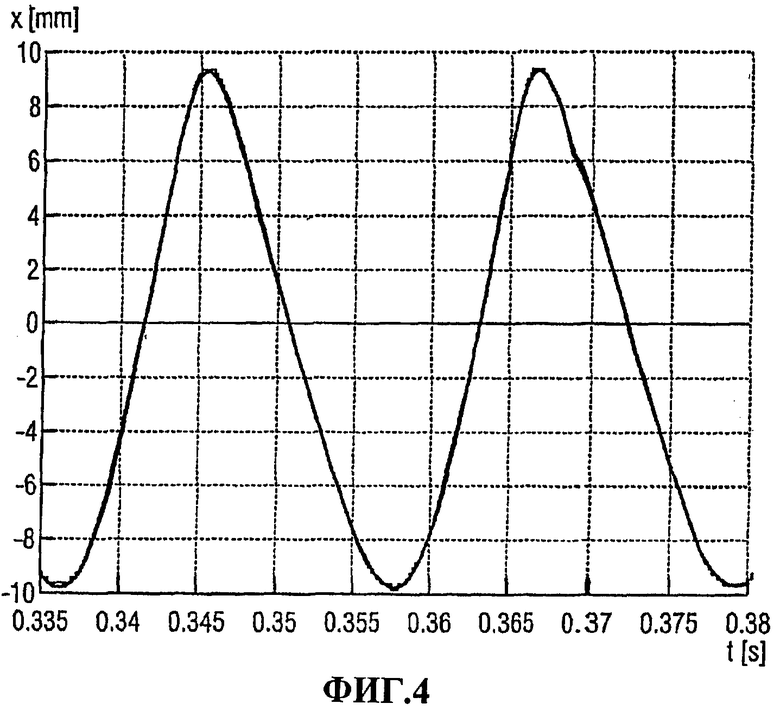
График на фиг.4 показывает измерение положения якоря x (в мм) в функции времени t (в с) для некоторого конкретного исполнения линейного привода.
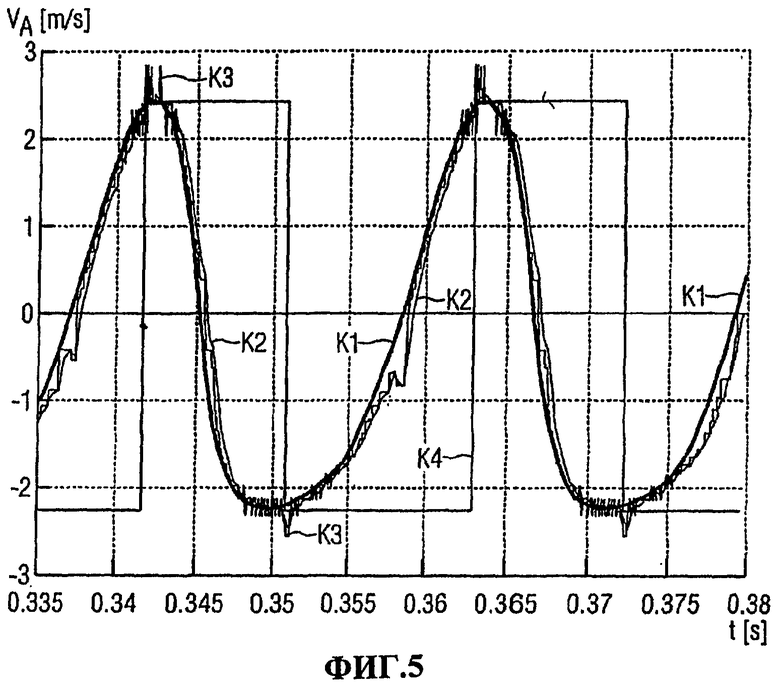
Аналогично, на графике фиг.5 показано для этого конкретного варианта исполнения измерение скорости якоря vA (в м/с) в функции времени t (в с). На графиках обозначены:
K1 - кривая реальной скорости,
K2 - кривая сглаженного результата измерения фотоячейкой,
К3 - кривая результата измерения скорости фотоячейкой,
K4 - определенное в момент запуска и поддерживаемое в соответствии значение скорости.
Разумеется, в предлагаемом в изобретении линейном приводе наряду с рассмотренными выше средствами оптического измерения положения якоря и производных величин, таких как скорость и направление движения, должны применяться и другие, известные сами по себе не оптические средства. Так, например, калибровка абсолютного положения якоря может производиться с помощью независимого стороннего сигнала запуска, например с помощью электрического контакта.
В отношении показанных на фигурах элементов со штриховым рисунком предполагалось, что они жестко связаны с якорными салазками, а одинарная или сдвоенная фотоячейка установлена неподвижно. Но так как определяющим является только относительное движение этих частей, то фотоячейка может находиться на якорных салазках или перемещаться как-нибудь иначе при неподвижном элементе со штриховым рисунком.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЛУАТАЦИИ ЛИНЕЙНОГО КОМПРЕССОРА | 2007 |
|
RU2413873C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВКИ ХОДА ЯКОРЯ В РЕВЕРСИВНОМ ЛИНЕЙНОМ ПРИВОДЕ | 2005 |
|
RU2373623C2 |
| КОНТЕЙНЕР ДЛЯ ДЕТСКОЙ СМЕСИ С ОТДЕЛЕНИЕМ И КРЫШКОЙ | 2015 |
|
RU2658785C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАСПРЕДЕЛЕНИЯ ДАВЛЕНИЯ ПО ОПОРНОЙ ПОВЕРХНОСТИ СТОПЫ | 2006 |
|
RU2328976C1 |
| ЛИНЕЙНЫЙ ПРИВОД С КОЛЕБАТЕЛЬНЫМ ЭЛЕМЕНТОМ ЯКОРЯ И ПРУЖИНОЙ | 2005 |
|
RU2365020C2 |
| Измерительное устройство для определения взаимного перемещения двух подвижных частей механизмов | 1960 |
|
SU142699A1 |
| СОЛНЕЧНЫЙ ИНТЕНСИФИЦИРОВАННЫЙ ТЕПЛИЧНЫЙ КОМПЛЕКС | 2002 |
|
RU2264080C2 |
| ЛИНЕЙНЫЙ ПРИВОД С СЕРДЕЧНИКОМ И ЯКОРЕМ С ПОСТОЯННЫМИ МАГНИТАМИ (ВАРИАНТЫ) | 2005 |
|
RU2368055C2 |
| Счетчик числа осей для железнодорожной сигнализации | 1926 |
|
SU12131A1 |
| МИКРОФОН | 2013 |
|
RU2526300C1 |
Изобретение относится к реверсивному линейному приводу, имеющему, по меньшей мере, одну обмотку возбуждения, в которую подается изменяющийся ток, магнитному якорю, а также средствам для определения положения якоря. Техническим результатом изобретения является определение фактического положения якоря с высоким разрешением. Реверсивный линейный привод содержит обмотку возбуждения и магнитный якорь, приводимый магнитным полем обмотки возбуждения в возвратно-поступательное колебательное движение вдоль оси; расположенный, по меньшей мере, по всей длине осевого хода якоря элемент со штриховым рисунком с чередующимся расположением светопроницаемых и светонепроницаемых полос или светоотражающих и не светоотражающих полос, а также фотоячейка с испускающими свет и воспринимающими свет перпендикулярно к осевому направлению частями; при этом элемент со штриховым рисунком выполнен в виде гребня и жестко соединен с якорем. 10 з.п. ф-лы, 5 ил.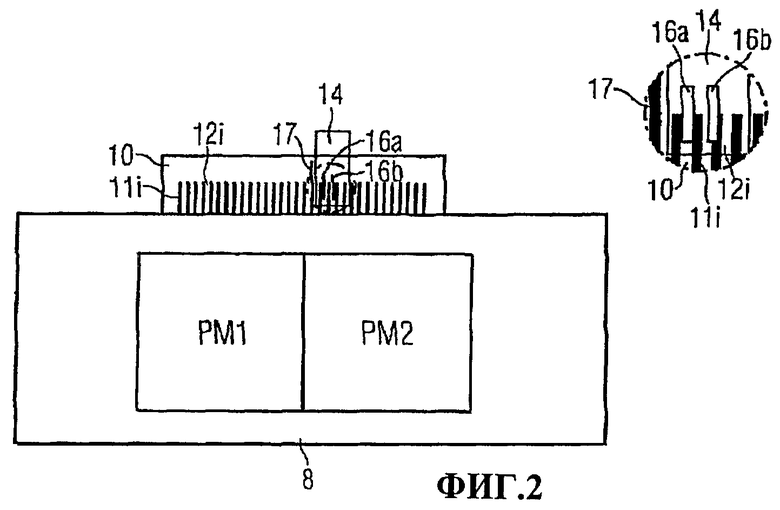
1. Реверсивный линейный привод, имеющий, по меньшей мере, одну обмотку возбуждения, в которую подается изменяющийся ток, магнитный якорь, совершающий под действием магнитного поля обмотки возбуждения линейное колебательное движение в осевом направлении с длиной осевого хода якоря, а также средства для определения положения якоря, причем средства, предназначенные для определения положения якоря, имеют размещенный, по меньшей мере, по всей длине осевого хода (Н) якоря элемент (10, 20) со штриховым рисунком с чередующимся расположением светопроницаемых и светонепроницаемых полос (12i, 11i соответственно) или светоотражающих и не светоотражающих полос, а также, по меньшей мере, одну фотоячейку (14) с испускающими свет и воспринимающими свет частями, световые лучи которой направлены, по меньшей мере, приблизительно, перпендикулярно к осевому направлению и к элементу со штриховым рисунком (10, 20), отличающийся тем, что элемент (10, 20) со штриховым рисунком выполнен в виде гребня и жестко соединен с якорем (8).
2. Привод по п.1, отличающийся тем, что фотоячейка (14) выполнена сдвоенной.
3. Привод по п.1 или 2, отличающийся тем, что светопроницаемые и светонепроницаемые полосы (12i, 11i) или светоотражающие и не светоотражающие полосы имеют одинаковые размеры в осевом направлении.
4. Привод по п.1 или 2, отличающийся тем, что, по меньшей мере, некоторые светопроницаемые полосы и светонепроницаемые полосы или светоотражающие и не светоотражающие полосы имеют неодинаковые размеры в осевом направлении.
5. Привод по п.1 или 2, отличающийся тем, что размер светопроницаемых и/или светонепроницаемых полос (12i, 11i), а также светоотражающих и/или не светоотражающих полос в осевом направлении менее 0,25 мм.
6. Привод по п.1, отличающийся тем, что элемент (10) со штриховым рисунком имеет дополнительно, по меньшей мере, одну полосу (17, 21) запуска.
7. Привод по п.6, отличающийся тем, что полоса (17, 21) запуска расположена в области вблизи максимальной скорости колеблющегося якоря (8).
8. Привод по п.6 или 7, отличающийся тем, что полоса (17) запуска регистрируется той же фотоячейкой (14), которая входит в состав средства для определения положения якоря.
9. Привод по п.6 или 7, отличающийся тем, что для регистрации полосы (21) запуска предусмотрена отдельная фотоячейка (22).
10. Привод по одному из пп.1, 2, 6, 7, отличающийся тем, что предусмотрены дополнительные средства для регистрации скорости якоря (8) и/или его направления движения.
11. Привод по одному из пп.1, 2, 6, 7, отличающийся тем, что якорь (8) жестко соединен с поршнем компрессора (V).
| US 4463300 А, 31.07.1984 | |||
| DE 19534758 A1, 28.03.1996 | |||
| Устройство для преобразования вращательного движения в поступательное | 1978 |
|
SU792499A1 |
| Линейный электродвигатель | 1982 |
|
SU1051662A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2025035C1 |

