Изобретение относится к электротехнике и может быть использовано в промышленных системах воспроизведения движений, например, для лазерной резки, сварки и сборки протяженных изделий, механообработки тяжелых заготовок, в частности в судостроении, в инструментальном производстве.
Известен электропривод, содержащий линейный синхронный электродвигатель, с подвижной частью которого соединен индуктосин, вырабатывающий выходное напряжение, пропорциональное скорости перемещения подвижной части линейного электродвигателя, которое подается на вход аналого-цифрового преобразователя, с выхода которого код подается на устройстов формирования управления линейным синхронным двигателем.
Однако известный электропривод не позволяет обеспечивать высокой точности позиционирования.
Наиболее близким по технической сущности и достигаемому результату к изобретению является электропривод, содержащий линейный синхронный двигатель совместно с датчиками скорости и ускорения подвижной части, замкнутую систему, подающую сигналы этих датчиков на двигатель, два цифроаналоговых преобразователя для формирования синусоидальных сигналов, подаваемых через усилители мощности на обмотки управления двигателя, причем сигнал с выхода акселерометра подается на входы аналого-цифровых преобразователей, с выхода которых разнополярные сигналы подаются на входы двух сумматоров, выходы которых соединены с входами двух цифроаналоговых преобразователей.
Однако известный электропривод на базе линейного синхронного двигателя не позволяет получать требуемую точность, особенно в динамическом режиме в связи с недостаточным усилием, развиваемым линейным двигателем.
Целью изобретения является повышение динамической точности.
Поставленная цель достигается тем, что в известном электроприводе, содержащем линейный синхронный двигатель, имеющий неподвижную часть, которая выполнена в виде магнитопровода с закрепленными на нем постоянными магнитами с чередующейся переменной полярностью, подвижную часть с якорем, имеющим основную трехфазную обмотку, два цифроаналоговых преобразователя, два сумматора, два усилителя мощности, дополнительно введены якорь с дополнительной трехфазной обмоткой, содержащей меньшее число витков по сравнению с трехфазной обмоткой основного якоря, устройство числового программного управления, пропорционально-интегральный регулятор, ограничитель напряжения, инерционное звено, узел токоограничения, функциональный преобразователь, два регулятора тока, два датчика тока, датчик положения, преобразователяь фаза-код, выпрямитель, формирователь импульсных сигналов перемещений , причем выход устройства числового программного управления соединен с входом первого цифроаналогового преобразователя, выход которого соединен с первым входом первого сумматора, выход которого соединен с входом пропорционально-интегрального регулятора, выход которого соединен с первым входом ограничителя напряжения, выход которого соединен с входом инерционного звена, выход которого соединен с входом узла токоограничения, выход которого соединен с первым входом функционального преобразователя, выход которого соединен с первым входом первого регулятора тока и первым входом второго сумматора, выход которого соединен с первым входом второго регулятора тока, выход первого и второго регуляторов тока соединены соответственно с входами первого и второго усилителей мощности, выходы которых предназначены для подключения соответственно к основной и дополнительной трехфазным обмоткам двигателя и к входам первого и второго датчиков токов, выходы которых соединены с вторыми входами первого и второго регуляторов тока, выход первого датчика тока соединен также с вторым инверсным входом второго сумматора, подвижная часть датчика положения установлена на подвижной части двигателя, неподвижная часть датчика положения - на неподвижной части двигателя, выход датчика положения соединен с вторым входом функционального преобразователя и входом преобразователя фаза-код, выход которого соединен с входом формирователя импульсных сигналов перемещения и входом второго цифроаналогового преобразователя, выход которого соединен с вторым инверсным входом первого сумматора и с входом выпрямителя, выход которого соединен с вторым входом ограничителя напряжения, выход формирователя импульсных сигналов перемещения соединен с входом устройства числового программного управления.
На фиг.1 изображена схема предлагаемого электропривода.
Электропривод содержит устройство 1 числового программного управления, первый 2 и второй 3 цифроаналоговые преобразователи, первый 4 и второй 5 сумматоры, пропорционально-интегральный регулятор 6, ограничитель 7 напряжения, инерционное звено 8, узел 9 токоограничения, функциональный преобразователь 10, первый 11 и второй 12 регуляторы токов, первый 13 и второй 14 усилители мощности, первый 15 и второй 16 датчики токов, сихронный линейный двигатель 17, датчик 18 положения, преобразователь фаза-код 19, выпрямитель 20 и формирователь 21 импульсных сигналов перемещения.
Электропривод работает следующим образом.
Устройство 1 реализовано на микропроцессоре и состоит из программного задатчика положения, блока обработки информации и цифрового регулятора положения. Фактическое положение подвижной части двигателя 17, измеренное с помощью датчика 18, преобразователя 19 и формирователя 21, сравнивается с заданным положением, вырабатываемым программным задатчиком, и подается в блок цифрового регулятора, в котором вырабатывается код задания на скорость. Сформированный таким образом код задания на скорость перемещения подается на вход первого цифроаналогового преобразователя 2, на выходе которого формируется аналоговое напряжение, пропорциональное величине заданной скорости перемещения. Напряжение, пропорциональное заданной скорости перемещения, поступает на первый вход первого сумматора 4, на второй инверсный вход которого подается напряжение, пропорциональное фактической скорости перемещения, измеренной датчиком 18, преобразователем 19 и преобразованной в аналоговую величину вторым цифроаналоговым преобразователем 3. Полученная разность напряжений на выходе первого сумматора 4, пропорциональная разности заданной и фактической скорости движения, подается на вход регулятора 6, являющегося регулятором скорости привода 17. С выхода регулятора 6 напряжение подается на первый вход ограничителя 7, на второй вход которого подается напряжение с выхода второго преобразователя 3 через выпрямитель 20. Ограничитель 7 ограничивает скорость перемещения двигателя 17. С выхода ограничителя 7 напряжение поступает на инерционное звено 8, необходимое для ограничения изменения тока двигателя 17. С выхода звена 8 напряжение подается на узел 9 токоограничения, необходимый для ограничения тока двигателя 17. С выхода узла 9 напряжение подается на функциональный преобразователь 10, который состоит из формирователя синусоидальных функций угла и умножителя сигналов, выход которого подключен к первому входу первого регулятора 11 тока. Один из входов умножителя сигналов подключен к выходу первого узла 9, другой вход умножителя подключен через формирователь синусоидальных функций угла к выходу датчика 18 положения подвижной части двигателя 17 относительно его подвижной части. На выходе функционального преобразователя 10 формируются напряжения, являющиеся синусоидальными функциями положения подвижной части линейного синхронного двигателя 17 относительно неподвижной. Амплитуда этих напряжений пропорциональна сигналу задания усилия, развиваемого двигателем 17 и поступаюещго с выхода узла 9. В первом регуляторе 11 тока приозводится сравнение токов, протекающих в фазах двигателя 17 и измеренных первым датчиком 15 тока с сигналами задания токов. При этом релейные элементы с гистерезисом, число которых равно числу фаз линейного двигателя 17, производят включение и отключение соотствующих силовых ключей первого усилителя 13 мощности. В результате чего токи в фазах двигателя 17 соответствуют сигналам задания.
В зависимости от знака сигнала задания усилия, поступающего на вход функционального преобразователя 10 задания амплитуды и фазы тока, фаза токов в обмотках двигателя меняестя на 180о. При этом меняется знак усилия, развиваемого линейным двигателем 17. Таким обарзом, линейный синхронный электропривод функционирует как обычная одноканальная система управления положением подвижной части двигателя 17.
Для повышения усилий и быстродействия, необходимых для перемещения подвижной части линейного синхронного двигателя 17 особенно в динамических режимах, используется дополнительный якорь в подвижной части двгиталея с дополнительными обмотками управления, имеющими относительно малое число витков и условно обозначенными вторым входом синхронного линейного двигателя. Для питания этих обмоток используется второй усилитель 14 мощности и второй регулятор 12 тока с вторым датчиком 16 тока. На вход второго регулятора 12 тока подается задающее напряжение с выхода второго сумматора 5, равное алгебраической разности напряжений на выходах функционального преобразователя 10 и первого датчика 15 тока.
Фактически задающее напряжение второго регулятора тока соответствует сигналу ошибки, по которому работают первый регулятор тока и первый усилитель мощности электропривода. В силу большой индуктивности обмоток основного якоря в каждой фазе линейного синхронного двигателя 17 изменение тока I1 в них происходит достаточно медленно (фиг.2), однако за счет сравнительно быстрого изменения тока I2 в дополнительных обмотках дополнительного якоря нарастание магнитного потока происходит достаточно быстро, а следовательно, быстро изменяется и усилие, развиваемое линейным двигателем 17. При этом за счет наличия перекрестной отрицательной обратной связи по току I1 с выхода первого датчика 15 тока на второй инвертирующий вход второго сумматора 5 происходит перераспределение низкочастотных составляющих заданного значения тока таким образом, что по окончании переходного процесса в основной обмотке линейного синхронного двигателя 17 требуемое значение тока отрабатывает первый регулятор 11 тока, тем самым возвращая значение тока в дополнительной обмотке, измеряемое вторым датчиком 16 тока, к нулю (фиг.2).
В результате отработка задающего напряжения на выходе функционального преобразователя 10 осуществляется как бы последовательными приближениями (итерациями), одновременно реализуемыми соответствующими каналами контура тока электропривода. За счет этого в электроприводе можно реализовать более высокое быстродействие контура тока без появления "паразитного" асинхронного момента двигателя. Это достигается надлежащим выбором параметров регуляторов скорости и положения и позволяет обеспечить расширение полосы пропускания привода, а следовательно, повысить его динамическую точность.
Несмотря на повышение быстродействия привода синхронная машина избавлена от внутренних перекрестных связей, вызываемых появлением "паразитного" асинхронного момента, и следовательно, в приводе может использоваться достаточно простая и надежная структра системы подчиненного регулирования каждым якорем.
Таким образом, обеспечивается высокое быстродействие, обусловленное малой индуктивностью дополнительной обмотки, при высоком уровне магнитного потока, создаваемого основной обмоткой с большим числом витков. Естественно, что форсировку протекания процесса нарастания тока в основной обмотке можно было бы в определенной степени обеспечить повышением напряжения преобразователя первого усилителя 13 мощности, однако это потребовало бы существенного увеличения суммарной установленной мощности преобразователей, питающих линейный двигатель.
Заметим, что так как высокочастотная составляющая требуемого значения магнитного потока обычно незначительна по сравнению с требуемым потоком, то во втором усилителе 14 мощности можно использовать преобразователь с установленной мощностью, составляющей около 25% мощности преобразователя первого усилителя 13 мощности. При этом за счет предлагаемого устройства удается расширить полосу пропускания электропривода на порядок и более.
Рассмотрим упрощенную схему синхронного линейного двигателя (СЛД).
В линейных двигателях нет затрат энергии на вращение ротора, отсутствуют кинематические звенья преобразования вращательного движения в поступательное. Поэтому они обеспечивают более рациональное управление по сравнению с двигателями поворотного типа. За счет применения аэростатических опор, жестко связанных с подвижной частью двигателя и создающих воздушную подушку толщиной 10...20 мкм, затраты энергии на преодоление сил трения в процессе перемещения сведены практически к нулю. С помощью регулируемых аэростатических опор выставляется воздушный зазор двигателя.
Упрощенная схема двухъякорного синхронного линейного двигателя показана на фиг. 3. Такой электродвигатель с возбуждением от постоянных высокоэрцитивных магнитов служит объектом управления рассматриваемого электропривода с двухканальным контуром тока (см. фиг.1).
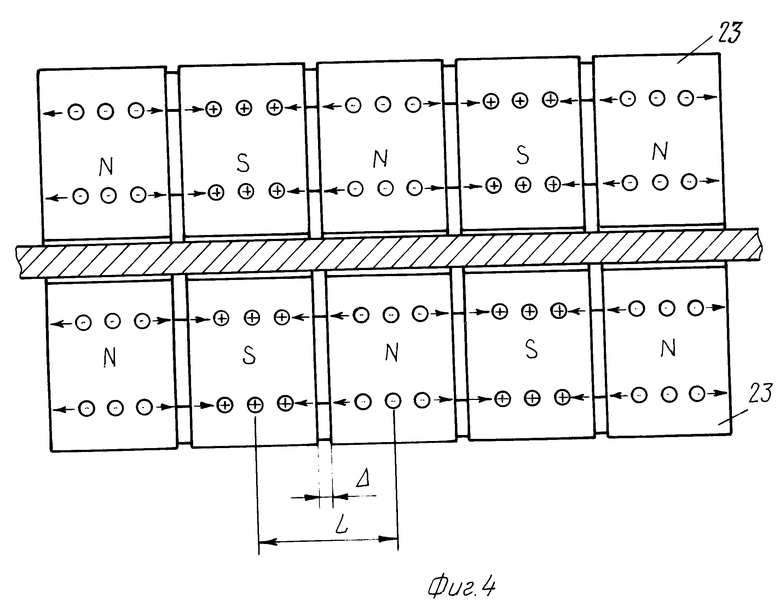
Неподвижная часть СЛД является индуктором и состоит из магнитопровода 22, на который в два ряда наклеены постоянные магниты 23 из самарий-кобальтового сплава с чередующейся переменной полярностью. Интервал Δ=3...6 мм между магнитами 23 и расстояние L между их центрами являются постоянными параметрами индуктора и определяются конструктивными особенностями подвижной части двигателя, в частности его якоря. Неподвижная часть жестко закреплена на гранитной направляющей 24. Для исключения трения применяются регулируемые аэростатические опоры, при помощи которых выставляется воздушный зазор двигателей δ=0,5...0,7 мм.
Подвижная часть СЛД представляет собой корпус 25, к которому крепятся якори 26 и 27 соответственно с основной 28 и дополнительной 29 обмотками управления, подвижные части датчиков положения и скорости, если такой применяется отдельно. Конструктивно якори 26 и 27 выполнены аналогично и состоят из пакетов склеенных листов электротехнической стали, в пазы которых уложены трехфазные обмотки 28 и 29 управления, закрытые экранами. Число пазов в каждом якоре Z=24, число пар полюсов 2р на фазу 4. Якори 28 и 29 разделены между собой изолятором 30 для уменьшения взаимовлияющих электромагнитных наводок.
Датчик положения представляет собой три преобразователя Холла, последовательно расположенные на стеклотекстолитовой плате на расстоянии 1/3 полюсного деления между собой.
В качестве одного из вариантов в электроприводе может быть использован самостоятельный бесконтактный датчик скорости (линейный тахогенератор), представляющий собой, например, шестифазный синхронный генератор с трапецеидальной формой ЭДС, величина которой пропорциональна линейной скорости перемещения подвижной часи СЛД.
Для повышения тяговых характеристик и соответственно мощности линейного двигателя в каждом якоре 26 и 27 уложлено по два идентичных друг другу параллельно соединенных пакета трехфазных обмоток 28 и 29 управления. Каждый пакет возбуждается магнитными потоками, создаваемыми соответствующими рядами постоянных магнистов 23.
Между рядами магнитов 23 (на фиг.3 виден только один ряд) может быть проложен теплоотводящий слой или теплообменник. Отрезками пунктирных линий со стрелками показано направление магнитных силовых линий (см. фиг.4).
Основные обмотки 28 управления с большим числом витков подключены к первому каналу двухканального контура тока электропривода. Ток в обмотках 28 регулируется регулятором 11 тока и усилителем 13 мощности. Дополнительные обмотки 29 управления относительно малым числом витков подключены к второму каналу двухканального контура тока. Ток в обмотках 29 регулируется регулятором 12 тока и усилителем 14 мощности.
Регуляторы тока представляют собой коммутаторы с положительной обратной связью, глубина которой определяет величину пределов стабилизации тока, а силовые ключи на выходе усилителей мощности - транзисторные модули (по два модуля на одну фазу), частота переключения которых синхронизирована с основной частотой генератора, а само переключение осуществляется по результатам сравнения сигналов задания токов и сигналов основной обратной связи по току в каждом канале управления. Функциональный преобразователь 10, связанный с датчиком 18 текущего положения задает распределение токов в обмотках управления по фазам СЛД (см.фиг.3) таким образом, что развиваемое двигателем усилие максимально. В рассматриваемом синхронном линейном приводе с частотно-токовым управлением коэффициент мощности cos ϕ=1.
Так как установленная мощность дополнительного канала контура тока составляет около 25% установленной мощности основного канала, то соответственно уменьшается и индуктивность обмотки 29 управления дополнительного якоря по сравнению с индуктивностью основных обмоток 28. Учитывая, что для линейных машин сила тяги Fт примерно пропорциональна квадрату индукции (или квадрату числа витков w), получаем следующую зависимсоть. Если обмоткам 28 каждой фазы каждого пакета основного якоря соответствует 400 витков, то дополнительным обмоткам 29 каждой фазы - 200 витков проводника. При этом соотношение сил F1т/F2т ≈4. Тогда основные обмотки 28 каждой фазы первого канала представляют собой четыре последовательно соединенные катушки по 100 витков в каждой, а дополнительные обмотки 29 каждой фазы второго канала - четыре последовательно соединенные катушки по 50 витков в каждой. Активная часть витка обычно не превышает 30-50% его общей длины.
Пунктирными замкнутыми линиями со стрелками на фиг.3 графически показано направление магнитных силовых линий поля, создаваемого постоянными магнитами, а сплошными замкнутыми линиями со стрелками - направление электродвижущей силы (силы тяги), возникающей в соответствующих фазах, например А1 и А2, обмоток управления якорей 26 и 27 СЛД. Стрелками показано также условное направление движения тока в обмотках 28 и 29 управления.
В рассматриваемом двухъякорном линейном двигателе (ЛД) векторы полезных сил  и
и  складываются, что приводит к пропорциональному увеличению результирующей силы тяги
складываются, что приводит к пропорциональному увеличению результирующей силы тяги  . Основной эффект от двухканального управления и 25-процентного конструктивного увеличения мощности двигателя имеет место в переходных режимах за счет эффективного перераспределения между каналами управления быстродействия и усилия F=F1+F2, создаваемого отдельными жестко связанными между собой исполнительными устройствами. При этом за счет повышения быстродействия контура тока сокращается необходимое время максимальной форсировки по току для основного канала, обеспечивающей выход ЛД на заданную скорость, что повышает надежность и срок службы двигателя.
. Основной эффект от двухканального управления и 25-процентного конструктивного увеличения мощности двигателя имеет место в переходных режимах за счет эффективного перераспределения между каналами управления быстродействия и усилия F=F1+F2, создаваемого отдельными жестко связанными между собой исполнительными устройствами. При этом за счет повышения быстродействия контура тока сокращается необходимое время максимальной форсировки по току для основного канала, обеспечивающей выход ЛД на заданную скорость, что повышает надежность и срок службы двигателя.
Под основным каналом управления контура тока понимают совокупность и функциональное взаимодействие следующих элементов электропривода: первого регулятора 11 тока, первого усилителя 13 мощности, первого датчика 15 тока и основного якоря в подвижной части ЛД (первый вход СЛД 17), а под дополнительным каналом управления контура тока - совокупность и функциональное взаимодействие второго сумматора 5, второго регулятора 12 тока, второго усилителя 14 мощности, второго датчика 16 тока и дополнительного якоря в подвижной части ЛД (второй вход СЛД 17).
Современная элементная база позволяет создавать высококачественные системы управления приводами, способные в линейном диапазоне изменения коэффициентов усиления силовых цепей отрабатывать значительные "скачки" заданий на величину тока в обмотках управления ЛД. Соответствующие ЛД имеют высокую кратковременную перегрузочную способность (десятикратную и более).
Пример, позволяющий с точки зрения развиваемых усилий в переходных режимах оценить эффективность рассматриваемого электропривода с двухканальным итерационным контуром тока по сравнению с одноканальным электроприводом. Под коэффициентом форсировки по току Кi условно понимают конструктивно заданную перегрузочную способность синхронного линейного привода, определяемую как Кi= Fфор/Fном, где Fном - номинальная сила тяги СЛД; Fфор - сила тяги СЛД в форсированном режиме, соответствующем переходному процессу нарастания тока в обмотках управления при требуемом скачкообразном изменении задающего воздействия. Тогда в качестве предельного значения К получим
Кimах=Fmах/Fном, (1) где Fmах - максимальная сила тяги СЛД, соответствующая максимально допустимому нарастанию тока управления в переходных режимах.
Пусть в прецизионном линейном электроприводе с высокой добротностью, но одноканальным контуром тока Fном= 200 Н и Кimах=10. При максимальном нарастании тока в якорной цепи силы тяги с учетом (1) имеем
Fmах=Fном˙Кimах=200˙10=2000 Н (2)
Для линейного электропривода с двухканальным контуром тока примем F1ном= = Fном= 200 Н, F2ном= 0,25˙Fном= 200˙0,25= =50 Н, К1imах= К2imах= Кimах= 10, где F1ном, К1imах и F2ном, К2imах - номинальная сила тяги СЛД и предельный коэффициент форсировки по току, создаваемые соответственно основным и дополнительным каналами контура тока, откуда
F1mах=F1ном˙К1imах=200˙10=2000 Н,
F2mах=F2ном˙К2imах=50˙10=500 Н, и для результирующей тяги двухканального привода получаем
FIImах= F1mах+ F2mах= 2000 +500=
= 2500 Н (3)
Сравнение полученных значений (2) и (3) максимальной силы тяги позволяет сделать вывод о возможности уменьшения в двухканальном приводе предельных коэффициентов форсировки по току каналов К1imах, К2mах на 20%, т.е.
К*1imах=К*2mах=0,8Кimах=8,
F*IImах= 200˙8+50˙8= 2000 Н, или возможности снижения составляющих номинальной силы тяги СЛД, создаваемых основным и дополнительным каналами, на 20%, т.е.
F*1ном= 0,8˙F1ном= 160 Н,F*2ном= 0,8 x xF2ном= 40 Н, F**IImах= 160˙10 + 40˙10= =2000 Н.
Из полученных в рассматриваемом примере результатов по усилиям, развиваемым СЛД в переходных режимах для электропривода с одноканальным Fmах и двухканальным FIImах (F*IImах или F**IImах) контуром тока, следует, что рассматриваемое устройство позволяет: при заданных предельных коэффициентах форсировок по току повысить мощность СЛД на 25%, что улучшает приемистость двигателя, а следовательно, его динамические характеристики, или при сохранении в двухканальном приводе требуемой мощности одноканального снизить установленную мощность преобразователей основного и дополнительного каналов на 20%, что уменьшает нагрузку на силовые транзисторные ключи.
Другим важным преимуществом предлагаемого устройства электропривода является то, что конструктивное снижение мощности дополнительного канала контура тока по сравнению с основным позволяет существенно повысить его быстродействие, что за счет применения итерационной структуры контура тока позволяет повысить быстродействие всего линейного электропривода, а следовательно, его динамическую точность.
Оценить эффективность повышения быстродействия контура тока электропривода за счет введения дополнительного канала по току и перекрестной отрицательной обратной связи позволяют результаты моделирования переходных процессов в системе.
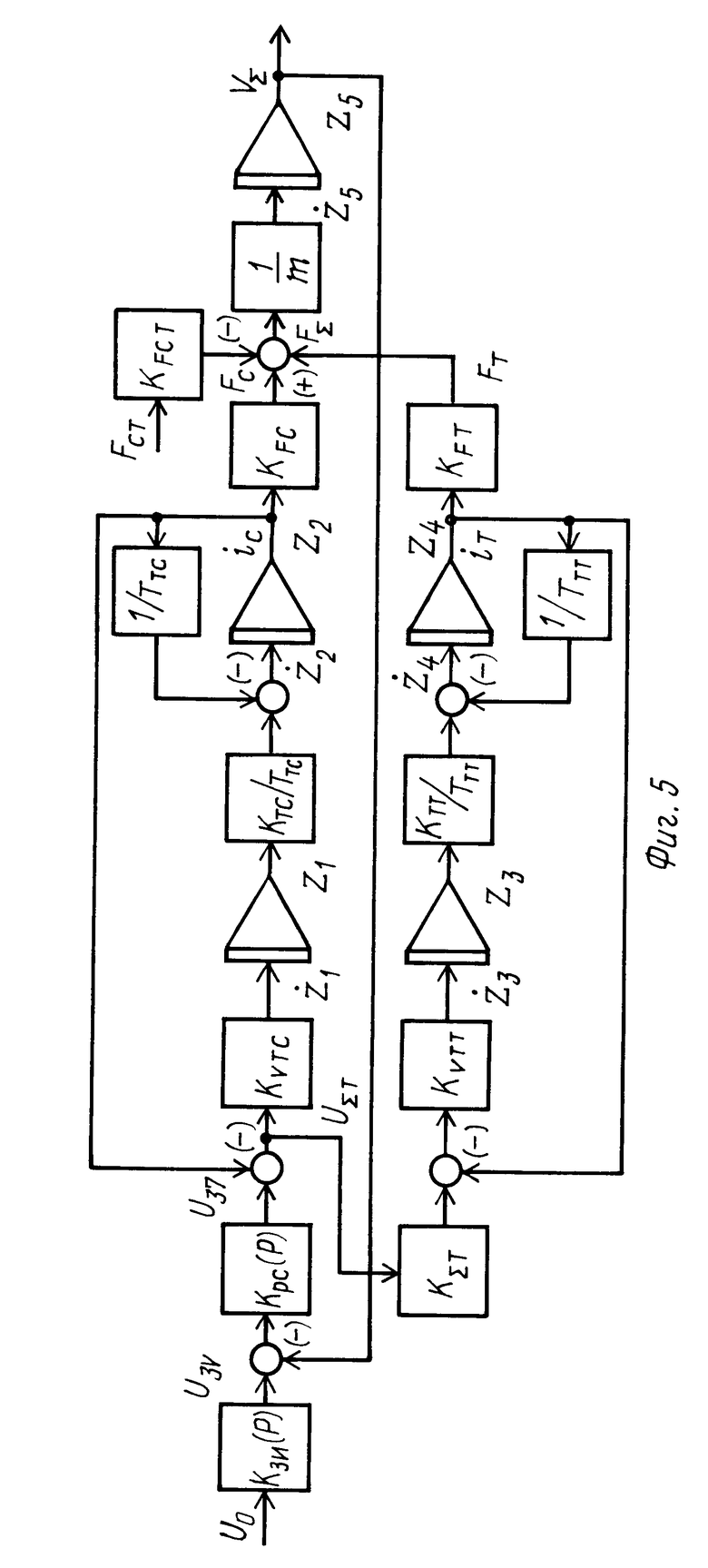
Моделирование переходных процессов в рассматриваемой системе проводилось по схеме, показанной на фиг.5. На схеме выделены формирователи тока силового основного (ФТс) и уточняющего дополнительного (ФТт) каналов и показаны электромеханические преобразователи (Кг) и другие элементы контура скорости линейного электропривода. Постоянные времени каналов и электромеханических преобразователей заданы соответственно Ттт=0,25 Ттс и КFТ=0,25 КFС.
Моделирование проводилось на ПП ЭВМ по векторно-матричному управлению типа (t) = A
(t) = A (t)+B
(t)+B (t), (4) где А и В матрицы состояния и управления;
(t), (4) где А и В матрицы состояния и управления;
Zi(t) и Uj(t) - переменные состояния и управления.
Основной целью моделирования было определение временных соотношений токов и усилий в силовом и точном каналах ФТ и влияния их на выходную скорость в общем контуре скорости.
На схеме приняты обозначения:
U3v(t) - сигнал задания скорости;
U3т(t) - сигнал задания тока;
UεT(t) - сигнал ошибки в контуре тока;
iс(t), iт(t) -токи силового и уточняющего каналов ФТ;
Fc(t), Fт(t), FΣ (t) - усилия, развиваемое в автономных каналах и суммарные;
Fст(t) - скорость на выходе контура;
VΣ(t)- скорость на выходе контура;
Крс(Р) - регулятор скорости;
KΣт - дополнительный усилитель;
Кiтс, Кiтт - коэффициенты усиления каналов ФТ;
Ттс, Ттт - постоянные времени каналов ФТ;
КFC, КFT - коэффициенты электромеханического преобразования в линейном двигателе;
m - масса, перемещаемая совместно с нагрузкой.
Настройка контуров проводилась по модульному критерию. Для моделирования были приняты значения параметров:
Ттс=0,02 с; КVTC=25 с-1; Ктс=1; КFC=2;
Ттт=0,005 с; Ктт=100 с-1; Ктт=1;
КFT=0,5; Крс=18; Kεi=4; m=1. (5)
Вначале были использованы формирователи тока (ФТ), каждый в своем автономном режиме, затем в совместном, итерационном.
Матрицы состояния управления для этих режимов равны: для автономного силового канала
A1TC = 
 0,5
0,5 
 ; B1TC =
; B1TC = 
 ; (6)
; (6)
для автономного уточняющего канала
A1TT =  2
2 0
0 
 ; B1TT =
; B1TT = 

 ; (7)
; (7)
для совместного инерционного режима
A2T = 





 ; B2T =
; B2T = 
 0
0  ; (8)
; (8)
Графики распределения токов в каналах в зависимости от режима, показаны на фиг.6. На графике приняты обозначения:
i1с, i1т - токи силового и уточняющего каналов в автономных режимах;
i2с, i2т - токи силового и уточняющего каналов в совместном, итерационном режиме.
Из графиков видно, что при принятых параметрах, токи в силовом канале практически не зависят от режима работы. Перерегулирование σк≅5% и время первого согласования tiсс=0,1 с. Для уточняющего канала в автономном режиме σ1т≅% , t1ст=0,25 с, а в итерационном режиме ток в уточняющем канале значительно возрастает до i2тmах=3,6 за время tmах=0,024 с (на фиг.6 график i2т пронормирован по этой величине) затем быстро спадает и по форме практически совпадает с производной от тока в силовом канале, т.е. действует в контуре как форсирующий фильтр.
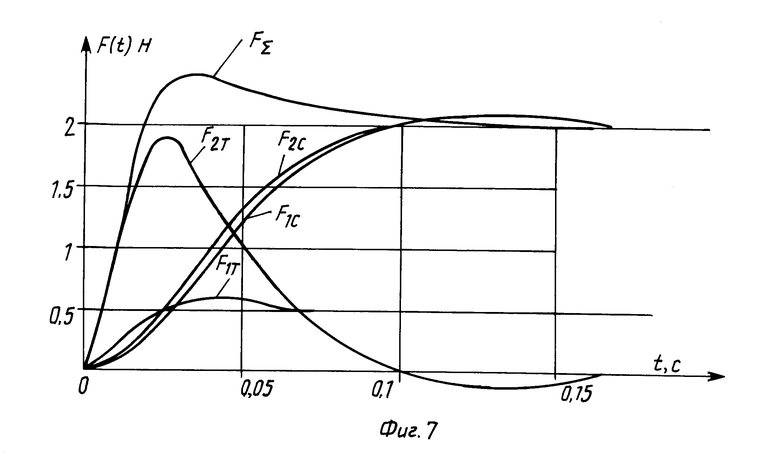
На графиках фиг.7 показаны изменения усилий, развиваемых линейным двигателем в автономных и итерационных режимах. На графике приняты обозначения:
F1c, F1т - усилия, развиваемые двигателем в автономном включении ФТс и ФТт;
F2с, F2т - усилия каналов при итерационном включении;
FΣ- суммарное усилие линейного двигателя.
Из графиков видно, что уточняющий канал в соответствии с принятыми обозначениями параметров в автономном режиме в четыре раза более быстродействующий, но и в четыре раза менее мощный. В итерационном режиме за счет достаточно кратковременного "всплеска" усилия уточняющего канала (кривая F2т) суммарное усилие двигателя (кривая FΣ) нарастает значительно быстрее и получает даже перерегулирование  10%.
10%.
Для расчета переходных процессов в контуре скорости при использовании одноконтурного ФТ1 и соответственно двухконтурного интерационного ФТ2 матрицы задавались равными:
A1C = 
 0
0 

 ; B1C =
; B1C = 
 ; (9)
; (9)
A2C = 

 0
0 

 0
0  ; B2C =
; B2C =  7
7 0
0  . (10)
. (10)
Графики токов ФТ, нормированных по своим максимальным значениям, для этих режимов показаны на фиг.8. На фигуре приняты обозначения:
i1 - ток в одноконтурном ФТ (i1mах ≈4,9);
i2с - ток в силовом канале при итерационном ФТ (i2cmах≅6,6);
i2т - ток в уточняющем канале при итерационном ФТ (i2тmах=55).
Токи двухканального итерационного ФТ в таком режиме существенно и возрастают и опережают токи в одноканальном ФТ.
Графики усилий, развиваемых каналами и линейным двигателем в целом, нормированных по максимальному значению одноканального ФТ, для тех же режимов показаны на фиг.9. На фигуре приняты обозначения:
F1 - усилие, развиваемое линейным двигателем при одноканальном ФТ;
F2с, F2т - усилия, развиваемые соответственно силовым и уточняющим каналами при двухканальном итерационном ФТ;
FΣ- суммарное усилие, развиваемое линейным двигателем при двухканальном итерационном ФТ;
Fст - статическое усилие нагрузки.
Из графиков видно, что усилия в двигателе с итерационным ФТ нарастают значительно быстрее,чем при одноканальном ФТ, однако при выбранных для модели параметрах из-за наличия существенного отрицательного выброса тока в уточняющем канале (при отрицательной производной тока в силовом канале), усилия силового и уточняющего каналов на этих участках времени складываются в противофазе, что, естественно, уменьшает суммарное усилие и скорость разгона. Этот недостаток может быть устранен или существенно уменьшен соответствующим выбором параметров контуров или отключением (отсечкой) уточняющего канала на время противофазных токов в силовом и уточняющем каналах.
На фиг.10 показаны графики переходного процесса по скорости при использовании одноконтурного ФТ (кривая V1) и двухконтурного (кривая V2Σ). При одноконтурном ФТ перерегулирование σ1V≈+ 6,6%, время первого согласования t1c1= 0,16 с, время установления процесса по уровню 0,99Vо-tр1=0,38 с. При двухконтурном итерационном те же параметры: σ2V≈-5,5%; t1с2=0,05 с; tр2= 0,17 с.
Для отработки технического решения согласно изобретению электропривода на НПО "Ротор" разработан макет синхронного линейного электропривода с двухканальным контуром тока подачи заготовок в плоскости ХОY для станков инструментального производства со следующими техническими данными
Линейные перемещения, мм по координате Х 400 по координате Y 250
Максимальная скорость перемещения по координатам Х, Y в режиме позиционирования, м/мин 20 в режиме механообработки, мм/мин 60
Точность позиционирования в рабочем режиме по координатам Х, Y, мкм ±1
Максимальная сила тяги, Н
всего СЛД: по координате Х 2500 по координате Y 2250 основного якоря СЛД: по координате Х 2000 по координате Y 1800
дополнительного якоря СЛД: по координате Х 500 по координате Y 450
Номинальная сила тяги подачи заготовки, Н по координате Х 200 по координате Y 100 Длительная номинальная нагрузка в рабочем режиме по координатам Х,Y,Н 160
Перемещаемые массы, г по координате Х (макс) 260 по координате Y (макс) 100
Максимальная масса заготовки, кг 50
Полоса пропускания СЛД, Гц 100
В макете электропривода использованы серийно выпускаемые устройства и узлы промышленно освоенных систем управления с ЧПУ-системы управления "Размер 2М-5-6".
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1983 |
|
SU1141526A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Электропривод с автономным источником питания | 1984 |
|
SU1236594A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1986 |
|
SU1388377A1 |
| Электропривод | 1985 |
|
SU1277346A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| Электропривод | 1980 |
|
SU955484A2 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Система автоматического регулирования продольной разнотолщинности полосового проката | 1988 |
|
SU1618477A1 |







Использование: в линейных синхронных электроприводах для лазерной резки, сварки и сборки, механообработке. Сущность изобретения: электропривод содержит линейный синхронный двигатель, имеющий неподвижную часть, которая выполнена в виде магнитопровода с закрепленными на нем постоянными магнитами с чередующейся переменной полярностью, подвижную часть с двумя якорями, имеющими каждый основную трехфазную обмотку и дополнительную трехфазную обмотку, содержащую меньшее число витков по сравнению с основной и уложенной в каждом якоре параллельно основной, два цифроаналогового преобразователя, два усилителя мощности, два сумматора, устройство числового программного управления, пропорционально-интегральный регулятор, ограничитель напряжения, инерционное звено, узел токоограничения, функциональный преобразователь, два регулятора тока, два датчика тока, датчик положения, преобразователь фаза-код, выпрямитель, формирователь импульсных сигналов перемещения. В электроприводе обеспечивается повышенная динамическая точность за счет двухканального управления по току. Грубое управление реализуется с помощью обмотки с большим числом витков основного якоря, а точное управление - с помощью обмотки с малым числом витков дополнительного якоря линейного двигателя. 10 ил.
ЭЛЕКТРОПРИВОД, содержащий линейный синхронный двигатель, имеющий неподвижную часть, которая выполнена в виде магнитопровода с закрепленными на нем постоянными магнитами с чередующейся переменной полярностью, подвижную часть с якорем, имеющим основную трехфазную обмотку, два цифроаналоговых преобразователя, два сумматора, два усилителя мощности, отличающийся тем, что, с целью повышения динамической точности, подвижная часть двигателя снабжена дополнительным якорем с дополнительной трехфазной обмоткой, содержащей меньшее число витков по сравнению с трехфазной обмоткой основного якоря, введены устройство числового программного управления, пропорционально-интегральный регулятор, ограничитель напряжения, инерционное звено, узел токоограничения, функциональный преобразователь, два регулятора тока, два датчика тока, датчик положения, преобразователь фаза-код, выпрямитель, формирователь импульсных сигналов перемещений, причем выход устройства числового программного управления соединен с входом первого цифроаналогового преобразователя, выход которого соединен с первым входом первого сумматора, выход которого соединен с входом пропорционально-интегрального регулятора, выход которого соединен с первым входом ограничителя напряжения, выход которого соединен с входом инерционного звена, выход которого соединен с входом узла токоограничения, выход которого соединен с первым входом функционального преобразователя, выход которого соединен с первым входом первого регулятора тока и первым входом второго сумматора, выход которого соединен с первым входом второго регулятора тока, выходы первого и второго регуляторов тока соединены соответственно с входами первого и второго усилителей мощности, выходы которых предназначены для подключения соответственно к основной и дополнительной трехфазным обмоткам двигателя и к входам первого и второго датчиков тока, выходы которых соединены с вторыми входами первого и второго регуляторов тока, выход первого датчика тока соединен также с вторым инверсным входом второго сумматора, подвижная часть датчика положения установлена на подвижной части двигателя, неподвижная часть датчика положения - на неподвижной части двигателя, выход датчика положения соединен с вторым входом функционального преобразователя и входом преобразователя фаза-код, выход которого соединен с входом формирователя импульсных сигналов перемещения и входом второго цифроаналогового преобразователя, выход которого соединен с вторым инверсным входом первого сумматора и входом выпрямителя, выход которого соединен с вторым входом ограничителя напряжения, выход формирователя импульсных сигналов перемещения соединен с входом устройства числового программного управления.
| Патент Великобритании N 1392753, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
