Область техники
Изобретение относится к устройству для регулирования хода якоря в реверсивном линейном приводе, который имеет, по меньшей мере, одну обмотку возбуждения, обтекаемую током обмотки возбуждения, и магнитный якорь, который под действием магнитного поля обмотки возбуждения совершает линейное колебательное движение в осевом направлении с заданным ходом якоря.
Уровень техники
Подобный линейный привод известен из патентного документа JP 2002-031054 А. Такие линейные приводы используются в частности для обеспечения линейного колебательного движения поршней компрессоров. Система, состоящая из такого компрессора с линейным приводом, называется поэтому также линейным компрессором (ср. вышеупомянутый документ JP-A). В соответствующих известных линейных компрессорах якорь, в соответствующих случаях подвешенный через посредство, по меньшей мере, одного пружинного элемента, представляет собой упругую инерционную систему, рассчитанную на определенную частоту колебаний при заданной характеристике "сила-путь" компрессора.
Известны различные способы регулирования положения или хода якоря в таком линейном компрессоре. Однако при известных способах регулирования хода якоря, как правило, отказываются от непосредственного непрерывного измерения положения якоря.
Фактическое положение якоря до сих пор определялось дискретным способом, например, посредством замыкания электрического контакта при достижении якорем определенного положения. Известен также непрерывный способ измерения положения, например, с помощью напряжения, индуцируемого в обмотке возбуждения.
Раскрытие изобретения
Задача настоящего изобретения состоит в создании устройства регулирования с вышеназванными признаками, которое сделает возможной точную настройку хода якоря.
Эта задача решена с помощью признаков, указанных в пункте 1 формулы изобретения. В соответствии с этим устройство регулирования должно иметь
средства для определения текущего значения положения якоря,
средства для измерения текущего значения тока обмотки возбуждения и
средства для задания тока обмотки возбуждения, так чтобы при установившемся режиме якоря в течение каждой полуволны движения якоря к якорю подводилось ровно столько энергии, сколько нужно для получения амплитуды колебаний, соответствующей заданному ходу якоря.
Прелагаемые в изобретении мероприятия основаны на том соображении, что для достижения желаемой длины хода, представляющей собой удвоенную амплитуду колебания, к якорю в течение каждой полуволны должно быть подведено определенное количество энергии, а именно, во время полуволны расширения для натяжения, по меньшей мере, возможно имеющегося пружинного элемента, а во время полуволны сжатия для совершения механической работы перемещения якоря и возможно связанной с ним движущейся части компрессора. Даже в установившемся режиме количества энергии, требующиеся для полуволн сжатия и расширения, как правило, различны и не известны заранее. Оба значения приходится оценивать, исходя из фактически устанавливающихся амплитуд колебания.
Основная идея предлагаемого в изобретении принципа регулирования состоит поэтому в том, что (квази-) непрерывное измерение положения якоря должно состоять не только из измерения длины хода, т.е. максимального отклонения, якоря, но и из измерения количества электрической энергии, подаваемой в якорь. Это возможно, поскольку количество электрической энергии пропорционально интегралу тока катушки по перемещению якоря. Во время каждой полуволны, в тот момент, когда в якорь поступит достаточное количество энергии, ток в катушке отключается. При каждом изменении направления движения якоря ток в катушке включается снова, причем с таким знаком, чтобы направление электромагнитной силы, действующей на якорь, и направление его движения совпадали. После этого измерение энергии и последующее отключение тока повторяются.
В дополнение к измерению положения в каждой полуволне, по меньшей мере, в определенной фиксированной, так называемой триггерной, точке может определяться скорость, а тем самым и кинетическая энергия якоря. При этом триггерная точка предпочтительно задается в области максимальной скорости якоря. Для измерения скорости не требуется отдельный датчик, так как ее можно определить посредством дифференцирования квазинепрерывного измерения положения. Далее, зная скорость, можно определить энергию, накопленную в якоре.
Во время полуволны расширения по результатам измерения положения и скорости, по меньшей мере, в одной триггерной точке, измерения положения дальней от компрессора мертвой точки, в которой кончается полуволна расширения, и измерения накопленной в якоре энергии можно оценить параметры линейного привода, например коэффициента жесткости пружины или коэффициента передачи "ток-сила". Во время полуволны сжатия с помощью аналогичных измерений можно определить параметры компрессора, например расходуемую в компрессоре в течение цикла механическую энергию, разность давлений нагнетания и всасывания в компрессоре и/или характеристику "сила-путь" компрессора.
Таким образом, предлагаемый в изобретении принцип регулирования делает возможным надежный запуск линейного компрессора, а также его надежную эксплуатацию при неустойчивых внешних условиях, т.е. при нестабильной характеристике компрессора. При этом под словом "надежный" подразумевается невозможность выброса поршня компрессора в фазе сжатия и его удара о пластину поршня или пластину клапана. Далее принцип регулирования позволяет очень точно регулировать так называемый мертвый объем камеры сжатия, а это является основной предпосылкой высокого общего кпд, например холодопроизводительности линейного компрессора.
Прочие предпочтительные модификации предлагаемого в изобретении линейного привода вытекают из зависимых пунктов формулы изобретения. При этом конструктивная форма по пункту 1 может сочетаться с признаками одного или даже нескольких зависимых пунктов. Таким образом, для линейного привода могут быть дополнительно предусмотрены еще следующие признаки:
Так, средства регулировки тока могут включать в качестве исполнительного звена регулятора тока выпрямительную схему с включенным после нее так называемым Н-мостом с регулируемыми элементами в его плечах. При этом в качестве регулируемых элементов в плечах моста предпочтительно могут быть применены МОП-транзисторы (MOSFET).
Измеренный ток обмотки возбуждения в качестве входной величины фактического значения тока предпочтительно подается на вход регулятора тока, управляющего элементами в плечах моста так, чтобы сигнал фактического значения тока стал равен откорректированному в соответствии с фактическим положением якоря, задаваемому регулятором положения заданному значению тока или, предпочтительно, отслеживал его. При необходимости сигнал фактического значения тока может подаваться также на вход регулятора положения.
Вместо вышеупомянутого определения скорости и энергии якоря с помощью, по меньшей мере, одной триггерной точки могут быть с особенным успехом применены также средства для непрерывного измерения скорости якоря (8). При этом можно с помощью соответствующих средств по измеренной скорости определить накопленную в якоре энергию.
Кроме того, могут быть также предусмотрены средства для регулирования частоты колебаний якоря. В этих средствах могут использоваться сигналы измерения положения, а при необходимости также сигналы измерения скорости.
Прочие предпочтительные модификации предлагаемого изобретением регулятора вытекают из не упомянутых выше зависимых пунктов.
Краткий перечень фигур чертежей
Ниже изобретение описывается подробнее с помощью предпочтительных примеров реализации со ссылками на чертежи. На чертежах представлены:
на фиг.1 - сильно схематизированный разрез части линейного привода, который сам по себе известен,
на фиг.2 - блок-схема первого варианта регулятора согласно изобретению и
на фиг.3 - блок-схема другого варианта такого регулятора.
Соответствующие части обозначены на чертежах одинаковыми номерами.
Осуществление изобретения
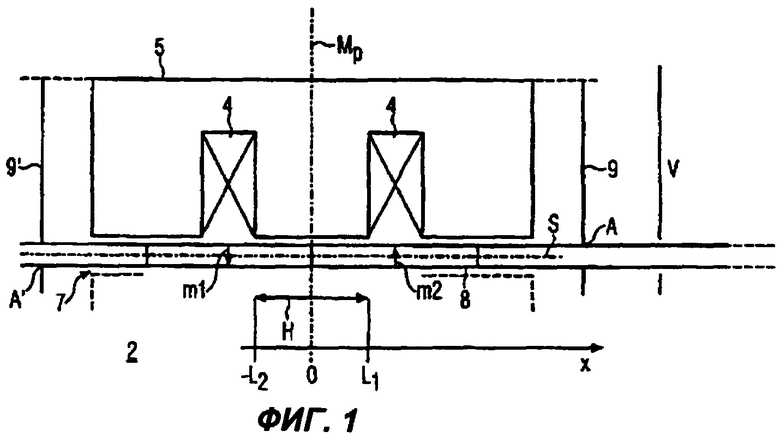
В основе представленного на фиг.1 линейного привода лежат известные сам по себе конструктивные варианты, применяемые для линейных компрессоров (ср. вышеупомянутый документ JP-A). На чертеже в основном схематически показана лишь верхняя часть сечения такого линейного привода 2; т.е. на чертеже изображены лишь те детали, которые лежат по одну сторону от оси или плоскости S, проходящей в направлении оси движения. Линейный привод 2 имеет, по меньшей мере, одну обмотку возбуждения 4, к которой относится, по меньшей мере, один сердечник 5, проводящий магнитный поток. В центральном щелевидном зазоре 7 под этим сердечником расположен магнитный якорь, например, с двумя аксиально расположенными друг за другом постоянными магнитами. Направления их намагниченности обозначены стрелками m1 и m2. Якорь, называемый также "якорными салазками", имеет по краям направленные вдоль оси, не рассматриваемые более подробно удлинители. Он может совершать в переменном магнитном поле обмотки 4 колебательное движение в осевом направлении, колеблясь относительно среднего положения Мр. Максимальное отклонение от среднего положения в осевом направлении х, т.е. амплитуда колебания обозначена +L1 и -L2. Соответственно длина хода Н якоря равна (L1+L2).
Как показано далее на чертеже, в представленном варианте исполнения две неподвижно закрепленные плоские пружины 9 и 9′ с обеих сторон среднего положения Мр могут своими подвижными точками А и А′ касаться удлиненных частей якоря 8. Разумеется возможны также конструктивные формы исполнения линейного привода и без пружин. Далее целесообразно, чтобы, по меньшей мере, с одной стороны своей удлиненной части якорь 8 был жестко связан с поршнем не изображенного на чертеже подробнее компрессора V.
В изображенном на чертеже варианте исполнения предполагается, что линейный привод 2 симметричен относительно плоскости S, т.е. что магнитопроводы, а в соответствующих случаях и обмотки возбуждения находятся с обеих сторон плоскости. Разумеется для предлагаемого в изобретении регулятора можно предусмотреть и такой линейный привод, который имеет обмотку возбуждения только с одной стороны, а с противоположной стороны в соответствующих случаях имеет только магнитопроводящее ярмо (см., например, US 6 323 568 B1). Наряду с изображенной Ш-образной формой магнитопровода возможны и другие формы, например М-образная.
При соединении якоря 8 линейного привода 2 с поршнем компрессора V пороговые значения энергии якоря для полуволн расширения и сжатия, вообще говоря, различны, т.е. в действительности имеют место два пороговых значения энергии якоря Es,exp и
Es,comp. Эти два пороговых значения энергии якоря изменяются во времени вследствие изменения во времени характеристики "сила-путь" компрессора, причем эти изменения происходят медленно по сравнению с периодом колебаний линейного привода. В связи с этим целесообразна и возможна наложенная адаптация обоих значений на собственно регулирование хода якоря.
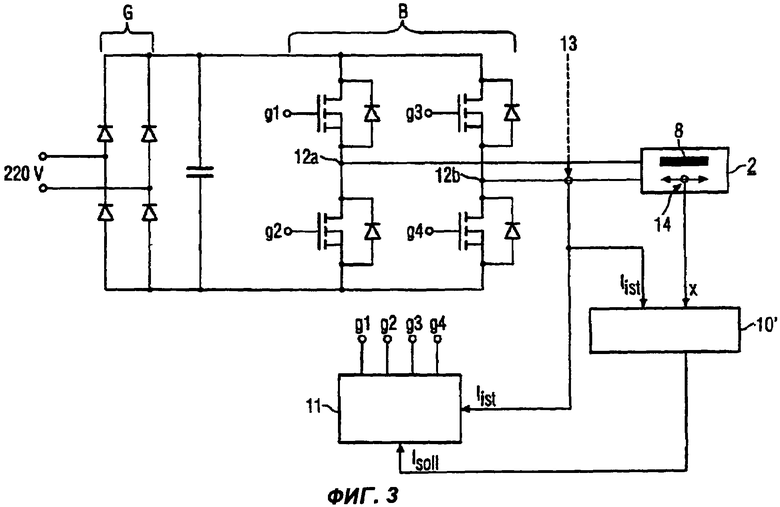
Для регулирования хода Н якоря, т.е. амплитуд колебания +L1 и -L2 предназначен регулятор, с помощью которого задается ток в обмотке 4 возбуждения. Блок-схема первого варианта исполнения такого регулятора представлена на фиг.2. На чертеже применены следующие обозначения:
G - выпрямительная схема, например в виде выпрямительного моста,
С - сглаживающий конденсатор,
В - преобразователь в виде так называемого полного моста,
b1-b4 - четыре плеча этого преобразователя, соединенные по схеме так называемого Н-моста,
10 - модуль регулятора положения и
11 - модуль регулятора тока.
В качестве плеч моста b1-b4 особенно пригодны MOSFET (канальные полевые униполярные МОП-транзисторы) с защитными диодами di. Их управляющие электроды (затворы) обозначены буквами g1-g4. Они соединены с соответствующими выходами регулятора 11 тока. С выходных зажимов 12а и 12b подается ток возбуждения в обмотку возбуждения линейного привода 2. При этом фактическое значение тока обмотки, обозначенное Iist, определяется путем измерения падения напряжения на шунте, включенном в мостовую схему последовательно с обмоткой, или на двух шунтах, включенных между плечами моста b2 и b4 и массой.
Измеренное значение этого тока подается затем на вход регулятора 11 тока в точке 13 присоединения в цепи питания обмотки возбуждения. В качестве регулятора тока может быть использован, например, известный ШИМ-регулятор (Широтно-Импульсный Модулятор). В альтернативном варианте в качестве регулятора тока можно применить также известный двухпозиционный регулятор с фиксированной тактовой частотой, например 20 кГц.
На линейном приводе 2 установлено не рассматриваемое подробно, известное само по себе измерительное устройство 14, с помощью которого можно точно определить фактическое положение х и направление движения якоря 8. Это измеренное значение х подается на вход регулятора 10 положения, который, исходя из положения х и производных от него величин, в особенности скорости якоря, вычисляет заданное значение тока Isoll и подает его на вход регулятора 11 тока. Регулятор 11 тока управляет затворами g1-g4 так, чтобы обеспечить хорошее совпадение между заданным током Isoll и фактическим током Iist.
Изображенная на фиг.3 блок-схема другого предлагаемого изобретением регулятора отличается от схемы, показанной на фиг.2, только тем, что здесь измеренное фактическое значение тока Iist служит также входной величиной для измененного по сравнению с фиг.2 регулятора 10′ положения. Хотя при этом варианте возможны более значительные рассогласования между заданным током Isoll и фактическим током Iist, однако регулятор тока и здесь может при соответствующей настройке отключать ток желаемым образом.
Ниже описывается алгоритм регулирования положения с помощью устройств, изображенных на блок-схемах на фиг.2 и 3:
Действующая на якорь 8 электромагнитная сила F всегда пропорциональна фактическому току в катушке Iist, т.е.
F=K·Iist,
где F, К и Iist зависят от положения х.
При изменении направления движения изменяется полярность тока в катушке, так что теперь в направлении х действует сила F=K·(-Iist).
Либо непрерывно, либо с помощью специального триггерного сигнала, привязанного, например, к переходу движения якоря через нуль и находящегося вблизи положения якоря, в котором его кинетическая энергия максимальна, по результатам измерения мгновенных значений положения и скорости определяются потенциальная и кинетическая энергии якоря.
Энергия, подведенная к якорю в течение полуволны колебания, вычисляется по уравнению  .
.
Когда энергия якоря достигает порогового значения Es,comp или Es,exp, соответствующего желаемой амплитуде колебания +L1 или -L2, ток I отключается.
Наряду с этим основным алгоритмом возможен наложенный алгоритм коррекции, при котором путем сравнения измеренной амплитуды колебания +L1 или -L2 с соответствующей заданной амплитудой корректируется пороговое значение энергии якоря Es,comp или Es,exp.
Реализованный в блок-схемах принцип регулирования состоит, таким образом, из следующих основных элементов:
Измеряемые параметры:
положение х, направление движения и вычисляемая по ним скорость якоря 8; ток Iist.
Управляющий параметр:
ток катушки возбуждения. Здесь возможны различные варианты исполнительных органов для регулирования тока, причем величина рассогласования между фактическим и заданным значением тока может быть различной в зависимости от исполнительного органа.
Принцип регулирования:
Ток обмотки возбуждения всегда включен так, что электромагнитная сила (почти) всегда действует в направлении движения якоря; измерение электрической энергии, введенной в якорь в течение одной полуволны колебания; отключение тока при достижении порогового количества энергии.
Преимущества этого принципа регулирования:
В значительной мере предотвращается электрическое торможение якоря; этим обеспечивается высокий кпд.
Хотя частота колебаний якоря в значительной степени определяется движущейся массой, а также жесткостью возможно имеющейся пружины (пружин) и характеристикой "сила-путь" присоединенного компрессора, однако она может быть изменена за счет выбора коэффициента заполнения посредством регулирования тока: если при изменении направления движения действует больший ток на более коротком отрезке пути, то при том же количестве электрической энергии, вводимом в течение одной полуволны, частота колебаний увеличивается.
Изобретение относится к электротехнике и может быть использовано для регулирования хода (Н) якоря. Технический результат состоит в повышении точности настройки хода якоря. Якорь (8) реверсивного линейного привода (2) с обмоткой возбуждения под действием магнитного поля обмотки возбуждения совершает линейное колебательное движение в осевом направлении с заданным ходом (Н). Предусмотрены средства для определения текущего положения (х) якоря, средства для измерения текущего значения тока (Iist) обмотки возбуждения и средства для задания тока (Isoll) обмотки возбуждения, так чтобы в течение каждой полуволны движения якоря (8) к нему подводилось ровно столько энергии, сколько нужно для получения амплитуды колебаний (+L1, -L2), соответствующей заданному ходу (Н) якоря. 12 з.п. ф-лы, 3 ил.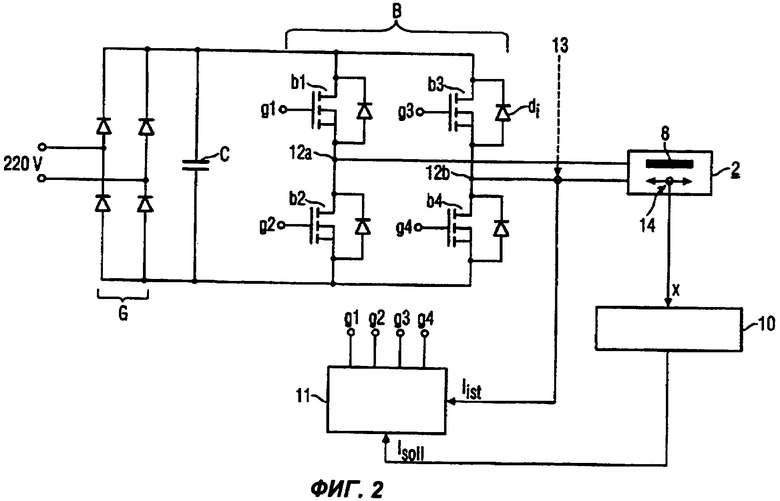
1. Устройство для регулирования хода якоря в реверсивном линейном приводе, которое имеет, по меньшей мере, одну обмотку возбуждения, обтекаемую током обмотки возбуждения, и магнитный якорь, который под действием магнитного поля обмотки возбуждения совершает линейное колебательное движение в осевом направлении с заданным ходом якоря, со средствами для определения текущего положения (х) якоря, со средствами для измерения текущего значения тока (Iist) обмотки возбуждения и со средствами для задания тока (Isoll) обмотки возбуждения, так, что при установившемся режиме якоря (8) в течение каждой полуволны движения якоря (8) к якорю подводится ровно столько энергии, сколько нужно для получения амплитуды колебаний (+L1, -L2), соответствующей заданному ходу (Н) якоря, причем для каждой полуволны движения якоря (8) подводимая к якорю энергия определяется так, что для каждой полуволны движения якоря установлено соответствующее пороговое значение энергии якоря (Es, exp, Es, comp), и что при каждой полуволне движения якоря ток обмотки возбуждения отключается, как только энергия, подведенная к якорю, достигнет соответствующего порогового значения
(Es, exp, Es, comp).
2. Устройство по п.1, отличающееся тем, что якорь (8), выполненный с возможностью совершать колебания, удерживается с помощью, по меньшей мере, одного пружинного элемента (9, 9').
3. Устройство по п.1, отличающееся тем, что средства регулировки тока включают в качестве исполнительного звена регулятора тока выпрямительную схему с включенным после нее Н-мостом с регулируемыми элементами (b1-b4) в его плечах.
4. Устройство по п.3, отличающееся тем, что в качестве регулируемых элементов (b1-b4) в плечах моста применены МОП-транзисторы.
5. Устройство по п.3 или 4, отличающееся тем, что измеренный ток обмотки возбуждения в качестве входной величины фактического значения тока (Iist) поступает на вход регулятора (11) тока, который управляет элементами (b1-b4) в плечах моста так, чтобы сигнал фактического значения тока (Iist) был равен откорректированному в соответствии с фактическим положением (х) якоря, задаваемому регулятором (10, 10') положения заданному значению тока (Isoll) или, предпочтительно, отслеживал его.
6. Устройство по п.5, отличающееся тем, что сигнал фактического значения тока (Iist) поступает также на вход регулятора (10') положения.
7. Устройство по п.1, отличающееся тем, что предусмотрены средства для определения направления движения якоря (8).
8. Устройство по п.1, отличающееся тем, что предусмотрены средства для непрерывного измерения скорости якоря (8).
9. Устройство по п.8, отличающееся тем, что для каждой полуволны движения якоря (8), по меньшей мере, в одном фиксированном положении якоря осуществляется измерение скорости якоря.
10. Устройство по п.9, отличающееся тем, что фиксированное положение предусмотрено в области максимальной скорости якоря (8).
11. Устройство по одному из пп.8-10, отличающееся тем, что энергия, накопленная в якоре (8), определяется, исходя из измеренного значения скорости и положения якоря.
12. Устройство по одному из пп.1-4, 6-10, отличающееся тем, что предусмотрены средства для регулирования частоты колебаний якоря (8).
13. Устройство по одному из пп.1-4, 6-10, отличающееся тем, что якорь (8) жестко соединен с поршнем компрессора (V).
| US 5980211 А, 09.11.1999 | |||
| ЛИНЕЙНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU1774821C |
| US 5736797 А, 07.04.1998 | |||
| US 2002121816 А, 05.09.2002. | |||

