Область техники
Настоящее изобретение относится к области радиационного контроля и в частности к способам и установкам для быстрого досмотра жидких объектов с использованием проникающего излучения.
Предпосылки для создания изобретения
После событий 11 сентября 2001 года проблема досмотра багажа в авиации США становится все более насущной. Кроме традиционного досмотра пакетов, сумок, чемоданов, контейнеров также становится все более актуальным досмотр жидких объектов, провозимых пассажирами. Соответственно, средства и способы быстрого контроля жидких объектов в багаже крайне необходимы.
В настоящее время используются четыре вида способов контроля, используемых для досмотра жидких объектов, а именно: химический, электромагнитный, нейтронный и радиационный.
1) Химический способ можно разделить на способ идентификации по запаху, способ определения ионной подвижности для обнаружения взрывчатых веществ и вещественный анализ. Способ идентификации по запаху часто не дает результатов, поскольку жидкие объекты могут быть запечатаны или плотно упакованы. Способ обнаружения взрывчатых веществ по ионной подвижности отличается высокой чувствительностью, однако его недостатками являются высокий уровень ложной тревоги и сильное влияние условий внешней среды. Вещественный анализ отличается высокой точностью, однако для выполнения анализа образца необходимо достаточное время, и поэтому этот способ не отвечает требованиям проведения быстрого досмотра на месте.
2) В электромагнитном способе используются активные измерения. В этом случае различение жидких объектов осуществляется в электромагнитном поле в соответствии с их диэлектрическими постоянными. На эффективность применения электромагнитного способа сильное влияние оказывают металлические части багажа или толстые слои находящихся в них материалов. В результате применение электромагнитного способа ограничено в случае сложных материалов упаковки.
3) При применении нейтронного способа контроля в досматриваемой жидкости остается остаточная радиация, наведенная в результате эффекта нейтронной активации. Кроме того, в этом случае из-за высокой проникающей способности нейтронов проблему представляет обеспечение защиты, и поэтому оборудование занимает много места, так что этот способ непригоден для использования в установках досмотра для гражданской авиации.
4) В настоящее время большая часть досмотровых установок в гражданской авиации являются установками радиационного контроля. В этих установках большей частью используется технология рентгеноскопии для получения двумерных изображений и технология компьютерного томографического сканирования для получения трехмерных изображений. Эти технологии, используемые в основном для досмотра багажа, не дают результатов для находящихся в багаже жидких объектов.
При использовании технологии двумерной рентгеноскопии получают двумерные изображения, на которых объединяется трехкоординатная информация об объектах, обнаруженных на пути потока рентгеновского излучения. На этих изображениях различия в структуре объекта передаются в форме оттенков серого цвета или псевдоцветовой гаммы, в результате чего оператору представляется достаточно наглядная картина объекта. Однако технологии рентгеноскопии с получением двумерных изображений недостает информации об объекте по одному измерению, поэтому при проверке жидких объектов большое влияние оказывают их формы и размеры.
Технология компьютерного томографического сканирования с получением трехмерных изображений представляет собой одно из приложений компьютерной томографии (КТ). Компьютерная томография сначала применялась в диагностике, при этом под разными углами получали соответствующие срезы объекта. Затем с помощью компьютера из этих данных просвечивания под разными углами получали восстановленные изображения объекта. Информация о различных коэффициентах ослабления на восстановленных изображениях отображалась в форме различных оттенков серого цвета, давая представление о внутренней структуре объекта. По мере развития КТ-технологии были разработаны и внедрены промышленные КТ-установки для неразрушающего контроля и для досмотра багажа, задача которых по-прежнему заключалась в получении изображений срезов, на которых проявляются различия внутренней структуры объекта. Поэтому при использовании традиционной технологии рентгеноскопии с получением трехмерных изображений для проверки жидких объектов, можно было получить только изображения срезов, на которых отсутствовали различия внутренней структуры.
Таким образом, трудно ожидать широкого распространения досмотровых установок, в которых используется компьютерная томография, по причине их высокой стоимости и больших размеров, являющихся результатом большого многообразия объектов, которые должны досматриваться этими установками.
Резюмируя, можно сказать, что химический способ, электромагнитный способ и способ контроля с помощью потока нейтронов не подходят для быстрого досмотра жидких объектов. При использовании технологии рентгеноскопии с получением двумерных изображений и технологии трехмерной компьютерной томографии можно получить изображения в оттенках серого цвета или в псевдоцветовой гамме, однако эти изображения недостаточны для использования при досмотре жидких объектов.
Сущность изобретения
Для преодоления недостатков существующих технических решений в настоящем изобретении предлагается способ и устройство для радиационного контроля жидких объектов, которые обеспечивают высокую скорость выполнения контроля и позволяют получить количественную информацию по жидким объектам, подлежащим проверке, без разрушения внешней упаковки.
Первым объектом изобретения является способ радиационного контроля жидких объектов, который содержит следующие стадии: получение исходной информации об окружении объекта; включение потока проникающего излучения для просвечивания жидкого объекта; прием потока излучения, прошедшего сквозь жидкий объект, для формирования массива данных просвечивания объекта под разными углами; вычисление коэффициента поглощения излучения жидкого объекта путем выполнения обратной операции над массивом данных просвечивания объекта под разными углами с учетом исходной информации об окружении и однородности жидкого объекта; сравнение коэффициента поглощения излучения с предварительно записанными данными для получения соответствующей информации по жидкому объекту.
В соответствии с одним из вариантов осуществления изобретения исходная информация об окружении объекта содержит информацию о геометрических границах жидкого объекта, подлежащего проверке.
В соответствии с одним из вариантов осуществления изобретения информацию о геометрических границах получают с использованием технологии радиографии или технологии сканирования для получения изображений.
В соответствии с одним из вариантов осуществления изобретения жидкие объекты, подлежащие проверке, обладают однородностью в отношении излучения.
Другим объектом изобретения является устройство радиационного контроля жидких объектов, которое содержит: источник излучения для обеспечения потока проникающего излучения; несущий механизм для удерживания жидкого объекта, подлежащего проверке, так чтобы через него проходил поток проникающего излучения; устройство приема излучения и сбора данных для получения исходной информации об окружающей среде и данных просвечивания жидкого объекта под разными углами; и устройство компьютерной обработки данных. Устройство компьютерной обработки данных содержит: устройство вычисления коэффициента поглощения излучения жидкого объекта путем выполнения обратной операции над массивом данных просвечивания объекта под разными углами, причем исходная информация об окружении жидкого объекта и его однородность являются граничными условиями; и устройство сравнения коэффициента поглощения излучения с предварительно записанными данными для получения соответствующей информации по жидкому объекту.
В соответствии с одним из вариантов осуществления изобретения в качестве источника излучения используется рентгеновский аппарат (трубка) или радиоизотопный источник.
В соответствии с одним из вариантов осуществления изобретения должен использоваться один источник излучения или несколько таких источников.
В соответствии с одним из вариантов осуществления изобретения интенсивность источника излучения может регулироваться.
В соответствии с одним из вариантов осуществления изобретения в устройство приема излучения и сбора данных интегрированы детектор и устройство сбора данных.
В соответствии с одним из вариантов осуществления изобретения в качестве детектора используется твердотельный, жидкий, газовый или полупроводниковый детектор.
В соответствии с одним из вариантов осуществления изобретения должен использоваться один источник излучения или несколько таких источников.
В соответствии с одним из вариантов осуществления изобретения детектор реализован в форме одномерной линейки или двумерной матрицы.
В соответствии с одним из вариантов осуществления изобретения детектор снабжен функцией включения энергии.
В соответствии с одним из вариантов осуществления изобретения детектор работает в режиме интегрирования тока или в режиме счета импульсов.
В соответствии с одним из вариантов осуществления изобретения массив данных просвечивания объекта под разными углами получают путем вращения жидкого объекта, подлежащего проверке, или вращением источника излучения и устройства приема излучения и сбора данных.
В соответствии с одним из вариантов осуществления изобретения массив данных просвечивания объекта под разными углами получают путем увеличения количества углов просвечивания или смещением детектора на 1/4 размера приемного элемента.
В соответствии с одним из вариантов осуществления изобретения сравнение в устройстве компьютерной обработки данных осуществляется путем выполнения заранее заданного алгоритма.
В соответствии с одним из вариантов осуществления изобретения синхронизация работы источника излучения, устройства приема излучения и сбора данных, несущего механизма и устройства компьютерной обработки данных осуществляется контроллером сканирования.
Предлагаемое в изобретении устройство обладает следующими достоинствами: малая занимаемая площадь, высокая точность, высокая надежность и безопасность и, кроме того, его легко экранировать. Настоящее изобретение может использоваться в досмотровых системах аэропортов и в других ответственных приложениях.
Краткое описание чертежей
Особенности и достоинства изобретения можно лучше понять из нижеприведенного описания со ссылками на прилагаемые чертежи. На чертежах показано:
фигура 1 - схема установки радиационного контроля в соответствии с одним из вариантов осуществления изобретения;
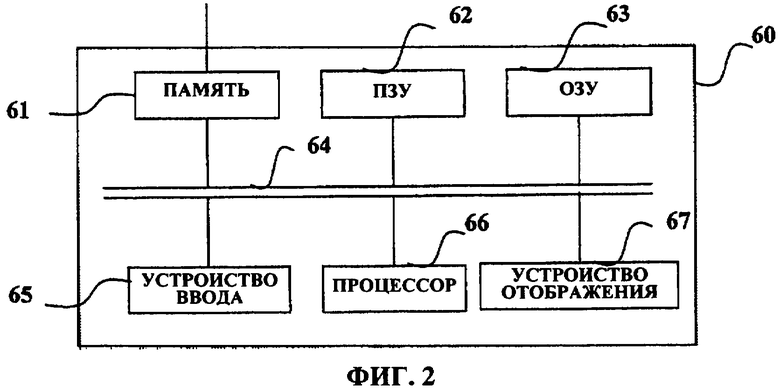
фигура 2 - блок-схема устройства компьютерной обработки данных в установке радиационного контроля, представленной на фигуре 1;
фигура 3 - блок-схема алгоритма выполнения способа в соответствии с одним из вариантов осуществления изобретения;
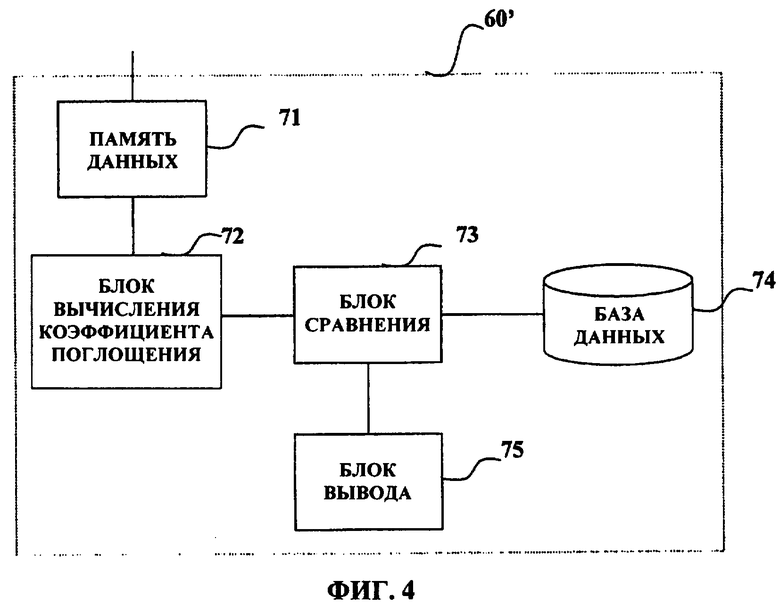
фигура 4 - функциональная блок-схема устройства компьютерной обработки данных в установке радиационного контроля, представленной на фигуре 1.
Подробное описание изобретения
Предпочтительный вариант осуществления изобретения будет описан ниже более подробно со ссылками на прилагаемые чертежи. Для обозначения одинаковых или сходных компонентов на разных фигурах используются одни и те же ссылочные номера. Для простоты подробное описания известных используемых функций и структур не приводятся, чтобы основное внимание сосредоточить на предмете изобретения.
На фигуре 1 приведена схема основных частей установки радиационного контроля в соответствии с одним из вариантов осуществления изобретения.
Как показано на фигуре 1, предлагаемая в настоящем изобретении установка радиационного контроля содержит следующие основные части: источник 10 излучения для обеспечения потока проникающего излучения для осуществления радиационного контроля, например рентгеновский аппарат или радиоизотопный источник; несущий механизм 30, который удерживает жидкий объект 20, подлежащий контролю, может вращаться вокруг оси Z и может опускаться и подниматься для ввода жидкого объекта 20 в досмотровую зону, в которой сквозь него может проходить проникающее излучение источника 10; устройство 40 приема излучения и сбора данных, представляющее собой интегральный модуль, в состав которого входит детектор и устройство сбора данных и который используется для приема излучения, прошедшего сквозь жидкий объект 20, формирования соответствующих аналоговых сигналов и преобразования их в цифровую форму, и выдачи информации сканирования жидкого объекта 20; контроллер 50 сканирования, управляющий каждым компонентом установки, так чтобы они работали синхронно; и устройство 60 компьютерной обработки данных для обработки информации, собранной устройством сбора данных, и вывода результатов контроля.
Как можно видеть на фигуре 1, источник 10 излучения размещен с одной стороны несущего механизма 30, удерживающего жидкие объекты 20, подлежащие досмотру, а устройство 40 приема излучения и сбора данных размещено с другой стороны несущего механизма 30. Устройство 40 приема излучения и сбора данных содержит детектор и устройство сбора данных для получения первичной информации об окружении жидкого объекта 20 и данные его просвечивания под разными углами. В состав устройства сбора данных входит схема усиления и формирования сигналов, которая работает в режиме интегрирования тока или в режиме счета импульсов. Устройство 40 приема излучения и сбора данных соединено с устройством 60 компьютерной обработки данных с помощью кабеля, по которому данные передаются для записи в базу данных.
На фигуре 2 показана блок-схема устройства 60 компьютерной обработки данных, показанного на фигуре 1. Как можно видеть на фигуре 2, данные, собранные в устройстве сбора данных, записываются в память 61. Данные конфигурации и программы устройства компьютерной обработки данных записываются в постоянном запоминающем устройстве 62 (ПЗУ). Для временного хранения различных данных, получаемых при выполнении программ процессором 66, используется оперативная память 63 (ОЗУ). Кроме того, программы компьютера и предварительно созданная база данных также записываются в память 61 для обработки данных. В базе данных сохраняются различные характеристики известных жидких объектов, такие как, например, коэффициент поглощения излучения, плотность и др., для сравнения с коэффициентами поглощения жидких объектов 20, вычисленных процессором 66. Внутренняя шина 64 обеспечивает соединение между собой памяти 61, ОЗУ 62, ПЗУ 63, устройства 65 ввода данных, процессора 66 и устройства 67 отображения информации.
После того как пользователь введет команды с помощью устройства 65 ввода информации, такого как, например, клавиатура и мышь, процессор 66 в соответствии с заложенными в компьютере программами выполняет последовательность команд для осуществления заданного алгоритма обработки данных. После получения результатов обработки они отображаются на устройстве 67 отображения информации, например на жидкокристаллическом мониторе, или направляются на печать.
На фигуре 3 представлена блок-схема алгоритма выполнения способа радиационного контроля в соответствии с одним из вариантов осуществления изобретения. Как показано на фигуре 3, на стадии S10 жидкий объект 20, подлежащий досмотру, помещается на несущий механизм 30. После того как оператор введет команду начала сканирования, контроллер 50 сканирования выдает команды в источник 10 излучения на включение излучения и управляет несущим механизмом 30, так чтобы он поднимался и опускался для ввода объекта в досмотровую зону, формируемую источником 10 рентгеновского излучения и детектором. В этот момент включается поток проникающего излучения источника 10 и проходит сквозь жидкий объект 20, подлежащий досмотру. Контроллер 50 сканирования управляет устройством 40 приема излучения и сбора данных для приема излучения, проходящего сквозь жидкий объект 20, чтобы получить исходную информацию об окружении жидкого объекта, такую как, например, информация о геометрии границ объекта и др. Информация о геометрии границ объекта может быть получена с использованием технологии рентгеновской радиографии или рентгеновского сканирования для получения изображений. Рентгеновское сканирование для получения изображений может осуществляться с использованием режима поступательного движения, режима вращения или режима движения по спирали.
Кроме того, исходная информация об окружении досматриваемого жидкого объекта 20, полученная при выполнении вышеуказанных операций, содержит размер упаковки, ее материал, отношение объема упаковки к объему жидкого объекта и т.п. Указанная информация и коэффициенты поглощения излучения различных жидких объектов могут быть предварительно классифицированы с использованием алгоритма распознавания по методу нейронных сетей для формирования базы данных. При выполнении процедуры радиационного контроля жидкого объекта 20 измеренные характеристики сравниваются с характеристиками, записанными в базе данных.
После этого на стадии S20 несущий механизм 30 вращается в соответствии с командами, выдаваемыми контроллером 50 сканирования. Когда несущий механизм 30 устанавливается в первом направлении (первый угол), источник 10 включается для просвечивания жидкого объекта 20, подлежащего досмотру. Устройство 40 приема и сбора данных принимает излучение, прошедшее сквозь жидкий объект 20, для формирования набора данных для первого угла, который обозначается как 1×N-размерный вектор g1 и записывается в память 61 устройства 60 компьютерной обработки данных, где N - число приемных элементов одной линейки детектора.
На стадии S20' несущий механизм 30 снова вращается в соответствии с командами, выдаваемыми контроллером 50 сканирования. Когда несущий механизм 30 устанавливается во втором направлении (второй угол), источник 10 включается для просвечивания досматриваемого жидкого объекта 20. Устройство 40 приема и сбора данных принимает излучение, прошедшее сквозь жидкий объект 20, для формирования набора данных для второго угла, который обозначается как 1×N-размерный вектор g2 и записывается в память 61 устройства 60 компьютерной обработки данных.
Вышеуказанные стадии повторяются для разных углов. На стадии S20'' несущий механизм 30 снова вращается в соответствии с командами, выдаваемыми контроллером 50 сканирования. Когда несущий механизм 30 устанавливается в М-ом направлении (М-й угол), получают набор данных для М-го угла, который обозначается как 1×N-размерный вектор gM и записывается в память 61 устройства 60 компьютерной обработки данных. После выполнения вышеописанной процедуры сканирования получают массив данных для просвечивания жидких объектов с разных углов, который обозначается как М×N-размерный вектор g. Таким образом, данные просвечивания под разными углами жидкого объекта 20, подлежащего досмотру, могут быть последовательно получены для одного среза.
Для того чтобы увеличить объем данных, получаемых для просвечивания жидкого объекта под разными углами, может быть увеличено число углов, под которыми осуществляется просвечивание для одного среза, или же детектор смещается на 1/4 размера одного своего приемного элемента. Предположим, что линейный коэффициент ослабления (коэффициент поглощения) досматриваемого жидкого объекта 20 выражается в виде I-размерного вектора f, где I - количество пикселей дискретизации жидкого объекта. Для взаимодействия между рентгеновским излучением и веществом в данном случае в соответствии с законом Билла можно получить:
g1=exp(-H1f)
g2=exp(-H2f)

где каждый из членов Н, …, НМ представляет собой матрицу N×I, элементы которой Hnj отражают вклад пикселя j дискретизации в изображении объекта для соответствующего угла в величину сигнала, полученного детектором n. Каждый из членов Н, …, НМ представляет собой одиночную разреженную матрицу, которая определяется конкретной конструкцией сканирующей системы. Например, эти матрицы могут быть определены путем предварительного расчета и затем записаны в память 61, или рассчитываются в режиме реального времени в соответствии с текущими параметрами системы. Таким образом, данные по линейным коэффициентам ослабления для жидких объектов могут быть получены выполнением обратной операции в отношении формулы (1).
Обратная операция является инверсией прямой операции. Прямая операция заключается в том, что исходный сигнал, излучаемый источником 10, ослабляется при прохождении излучения сквозь жидкий объект 20, и в детектор приходит ослабленное излучение. Соответственно, обратная операция заключается в расчете данных ослабления излучения жидким объектом на основе сигнала, принятого детектором.
Однако поскольку обратная операция при проведении контроля жидких объектов сопряжена с недостатком информации, то необходимо использование другой информации, например информации о геометрии границ досматриваемого жидкого объекта 20, которую получают на предыдущей стадии S10, для повышения надежности и устойчивости решения.
На стадии S30 граничные условия и условия однородности для обратной операции устанавливаются на основе полученной на стадии S10 исходной информации об окружающей среде, которая содержит информацию о геометрии границ жидкого объекта 20. Пространственная форма жидкого объекта 20 может быть выражена в виде ограниченной функции. Информация о геометрии границ жидкого объекта 20 может быть определена с использованием вышеупомянутой технологии рентгеновской радиографии или рентгеновского сканирования с получением изображений, и в результате может быть определена действительная активная зона Ω, причем fi=0 для i∉Ω. Введение граничных условий может ускорить получение решения и в некоторой степени ослабить его некорректность. Во-вторых, поскольку целевым объектом установки радиационного контроля является жидкая часть, то сканируемый объект может быть разделен на две части: на зону Ω1 жидкости и зону Ωn, не содержащую жидкости. В случае однородности зоны жидкости будет получено, что fi является гладкой функцией (для i∈Ω1). Гладкая функция характеризуется тем, что общее изменение в зоне жидкости Ω1 и местные флуктуации в зоне Ωn, не содержащей жидкости, имеют ограничения. Использование однородности жидких объектов существенно способствует оптимизации получения информации о них и повышает устойчивость системы.
Необходимо отметить, что под жидкими объектами, характеризующимися однородностью, понимаются такие растворы, жидкие суспензии или эмульсии, поглощение излучения которыми является однородным. Например, молоко, овсяная каша и т.п. также являются однородными жидкими объектами, а именно, однородность этих жидких объектов будет проявляться в том случае, когда они поглощают излучение.
Поэтому на стадии S40 с учетом геометрии границ жидкого объекта 20 в качестве граничного условия и однородности жидкого объекта в качестве условия сходимости в устройстве 60 компьютерной обработки данных определяется коэффициент поглощения излучения для жидкого объекта 20 с использованием формулы (1). Затем действительный коэффициент поглощения жидких объектов может быть получен на основе полученных статистических характеристик пикселей внутри зоны Ω1.
После этого на стадии S50 в устройстве компьютерной обработки данных вырабатывается выходная информация по досматриваемому жидкому объекту 20 путем сравнения вычисленного коэффициента поглощения излучения с коэффициентами поглощения известных жидкостей, имеющимися в базе данных. Например, коэффициент поглощения излучения для спирта равен -280, и поэтому если полученный результат для неизвестной жидкости находится в диапазоне между -270 и -290, то неизвестный жидкий объект скорее всего является спиртом. Затем идентификационная информация по досмотренному жидкому объекту будет выведена на устройство 67 отображения информации или направлена на печать.
На вышеуказанной стадии S40 для вычисления коэффициента поглощения излучения жидкого объекта 20 при использовании в качестве граничных условий информации по геометрии границ и условия однородности может использоваться байесовский метод. Также может использоваться нестатистический метод, при котором сначала решают уравнение (1) для получения коэффициента поглощения излучения, а затем после выполнения оптимизации с использованием граничных условий и условия однородности осуществляют оценку линейного коэффициента ослабления жидкого объекта 20 на основе распределения fi для i∈Ω1 для повышения надежности и устойчивости вычислений. Ниже приводятся примеры вычисления коэффициента поглощения излучения с использованием байесовского и нестатистического методов.
Пример вычисления линейного коэффициента поглощения жидкого объекта с использованием байесовского метода
1. Определяется целевая функция:

где Фi(g; f) - функция правдоподобия, определяемая шумовыми характеристиками собранных данных; P(f) - показатель однородности для fi∈Ω1, например, P(f)=-variance(f)|fi∈Ω1, и λ - эмпирический параметр регулирования.
2. Решается уравнение f=arg max[Ф(f)] с использованием численного метода оптимизации. В процессе решения fi=0 для i∉Ω.
3. Вычисляется распределение вероятности р(µliquid) функции f∈Ω1 для получения линейного коэффициента поглощения жидкого объекта, например, µliquid=mean(f)|fi∈Ω1 или µliquid=arg max(р(f))|fi∈Ω1.
Пример вычисления линейного коэффициента поглощения жидкого объекта с использованием нестатистического метода
1. Осуществляется предварительная оценка коэффициента f поглощения излучения с использованием аналитического метода, например метода восстановления с использованием фильтрованных обратных проекций или ART метод.
2. Вычисляется однородность fi∈Ω1.
а) если удовлетворяется предварительно установленное требование по однородности, например местная дисперсия ниже определенного порогового значения, то определяется коэффициент поглощения жидкого объекта на основе статистических характеристик fi∈Ω1, таких как, например, µliquid=mean(f)|fi∈Ω1;
b) если требование однородности удовлетворяется, то выполняется обработка граничного условия и сглаживание коэффициента f поглощения излучения для получения f'. Осуществляется сравнение ортографической проекции обработанного коэффициента f' с собранными данными g, анализируется разница между ними для повторного восстановления и модификации f, и затем осуществляется возврат на стадию 2.
При осуществлении нестатистического метода скорость и точность вычислений может регулироваться установкой различных требуемых значений однородности. В некоторых крайних случаях коэффициент поглощения жидкого объекта может быть получен уже на первой стадии, без выполнения итераций.
Кроме того, на вышеупомянутой стадии S10 может быть получено, что жидкий объект 20 имеет слоистую структуру, например может иметь два слоя. Информация о геометрии границ этих двух слоев может быть получена с использованием вышеуказанного метода, после чего выполняют те же самые последующие операции в отношении соответствующих слоев жидкого объекта, и затем на выходе получают идентификационную информацию для двух типов жидких объектов, которая служит окончательной идентификационной информацией досматриваемого жидкого объекта 20. Например, в случае двухслойного жидкого объекта зона жидкого объекта содержит первую зону Ω1A и вторую зону Ω1В жидкого объекта. Линейный коэффициент ослабления первой зоны Ω1A жидкого объекта обозначается fA, и линейный коэффициент ослабления первой зоны Ω1В жидкого объекта обозначается fВ. Тогда fA является гладкой функций 1, для А∈Ω1А, и fB является гладкой функцией 2, для В∈Ω1В.
Таким образом, вышеописанные стадии S10-S50 выполняются в отношении первой зоны Ω1А и второй зоны Ω1В жидкого объекта, соответственно.
Как указывалось выше, на основании такой информации, как размер упаковки, ее материал и отношение размеров упаковки к размерам жидкого объекта, может быть осуществлен выбор алгоритма распознавания, такого как, например, ANM (искусственные нейронные сети), SVM (опорная векторная машина), BNN (байесовская нейронная сеть), получена таблица классификации для различных известных жидких объектов и сохранена в базе данных. Как указывалось выше, на стадиях S10 и S40 после получения исходной информации об окружении жидкого объекта 20, а также его коэффициента поглощения излучения классификация жидкого объекта 20 в базе данных также может быть определена с использованием того же самого нейронно-сетевого алгоритма распознавания, в результате чего может быть получена идентификационная информация для жидкого объекта 20.
В этом варианте осуществления изобретения сканирование осуществляется путем вращения досматриваемого жидкого объекта 20. За счет использования сканирования снижаются размеры и стоимость установки. Однако может использоваться и другой способ сканирования, при котором досматриваемый жидкий объект 20 остается неподвижным, а вращается источник 10 излучения и устройство 40 приема излучения и сбора данных.
Кроме того, источник 10 излучения может содержать один или несколько рентгеновских аппаратов, а также один или несколько радиоизотопных источников, и интенсивность излучения рентгеновских аппаратов может регулироваться. В том случае, когда источник 10 излучения содержит несколько рентгеновских аппаратов или радиоизотопных источников, количество детекторов может быть таким же, как и количество рентгеновских аппаратов или радиоизотопных источников. Для целей настоящего изобретения в качестве детекторов могут использоваться газовые, жидкие, твердотельные или полупроводниковые детекторы, и они могут быть снабжены функцией включения энергии. Кроме того, детекторы могут работать в режиме одномерного массива или двумерного массива, то есть линейка или матрица приемных элементов.
Операции вычисления коэффициента поглощения излучения и получения идентификационной информации для досматриваемого жидкого объекта 20 описаны выше в форме, при которой устройство 60 компьютерной обработки данных выполняет программы, содержащие заранее определенный алгоритм обработки данных. Однако устройство 60 компьютерной обработки данных может быть реализовано и в других формах. На фигуре 4 представлена функциональная блок-схема устройства 60 компьютерной обработки данных в установке радиационного контроля, представленной на фигуре 1.
Как можно видеть на фигуре 4, устройство 60' компьютерной обработки данных содержит следующие компоненты: устройство 71 хранения данных, в котором хранится исходная информация об окружении жидкого объекта и данные его просвечивания объекта под разными углами, а также другая информация, например системные таблицы H1, …НМ, содержащие характеристики системы; база данных 74, в которой хранятся коэффициенты поглощения для различных жидких объектов или другие характеристики так же, как база данных классификационной таблицы различных жидких объектов, которая используется для сравнения при выполнении операции проверки; блок 72 вычисления коэффициента поглощения, в котором осуществляется вычисление коэффициента поглощения излучения досматриваемого жидкого объекта 20 с использованием формулы (1) при условии однородности жидкого объекта на основе исходной информации об окружающей среде, записанной в устройстве 71 хранения данных, такой как, например, информация о геометрических границах жидкого объекта, и данные просвечивания объекта под разными углами; блок 73 сравнения, в котором осуществляется сравнение коэффициента поглощения излучения жидкого объекта 20, вычисленного в блоке 72 вычисления коэффициента поглощения, с предварительно записанными коэффициентами для определения полезной идентификационной информации по жидкому объекту 20; блок 75 вывода информации, такой как, например, устройство отображения или другое устройство вывода информации, для представления оператору идентификационной информации, полученной в блоке 73 сравнения.
Хотя выше были описаны варианты осуществления настоящего изобретения, специалистам в данной области техники должно быть ясно, что различные изменения и/или модификации будут охватываться объемом охраны изобретения, который определяется его формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТАНОВКА (ВАРИАНТЫ) ДЛЯ ДОСМОТРА ОБЪЕКТОВ, СОДЕРЖАЩИХ ЖИДКОСТИ | 2008 |
|
RU2445609C2 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ ПРОСВЕЧИВАНИЯ ИЗЛУЧЕНИЕМ ПОД РАЗНЫМИ УГЛАМИ | 2007 |
|
RU2400735C2 |
| УСТАНОВКА ДЛЯ ДОСМОТРА ГРУЗОВ | 2007 |
|
RU2386954C1 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ СПИРАЛЬНОГО СКАНИРОВАНИЯ | 2007 |
|
RU2396551C1 |
| УСТАНОВКА И СПОСОБ ОБНАРУЖЕНИЯ КОНТРАБАНДЫ В АВИАЦИОННЫХ ГРУЗОВЫХ КОНТЕЙНЕРАХ | 2008 |
|
RU2390006C1 |
| СИСТЕМА И СПОСОБ ДОСМОТРА ТРАНСПОРТНЫХ СРЕДСТВ С ИСПОЛЬЗОВАНИЕМ ИЗВЛЕЧЕНИЯ ЭТАЛОННЫХ ИЗОБРАЖЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ И ФУНКЦИИ СРАВНЕНИЯ | 2015 |
|
RU2626042C2 |
| УСТАНОВКА ДЛЯ ОБНАРУЖЕНИЯ КОНТРАБАНДЫ В АВИАЦИОННЫХ ГРУЗОВЫХ КОНТЕЙНЕРАХ | 2008 |
|
RU2390761C1 |
| СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2006 |
|
RU2343458C2 |
| МНОГОЭНЕРГЕТИЧЕСКИЕ МНОГОДОЗОВЫЕ УСКОРИТЕЛИ, СИСТЕМЫ БЫСТРОГО КОНТРОЛЯ И СПОСОБЫ БЫСТРОГО КОНТРОЛЯ | 2014 |
|
RU2608341C1 |
| ТОМОГРАФИЧЕСКАЯ СКАНИРУЮЩАЯ ДОСМОТРОВАЯ УСТАНОВКА И СПОСОБ СКАНИРОВАНИЯ | 2008 |
|
RU2383882C2 |

Изобретение относится к области радиационного контроля и может быть использовано для досмотра жидких объектов. Согласно изобретению способ содержит следующие стадии: получение исходной информации об окружении жидкого объекта; включение потока проникающего излучения для просвечивания жидкого объекта; прием потока излучения, прошедшего сквозь жидкий объект для формирования массива данных просвечивания объекта под разными углами; вычисление коэффициента поглощения излучения жидкого объекта путем выполнения обратной операции над массивом данных просвечивания объекта под разными углами с учетом исходной информации об окружении жидкого объекта и его однородности; и сравнение коэффициента поглощения излучения с предварительно записанными данными для получения соответствующей информации по жидкому объекту, подлежащему проверке. Способ реализуется установкой радиационного контроля жидких объектов. Изобретение позволяет исключить влияние внешней упаковки жидкого объекта, обеспечивает безопасность и надежность. 2 н. и 16 з.п. ф-лы, 4 ил.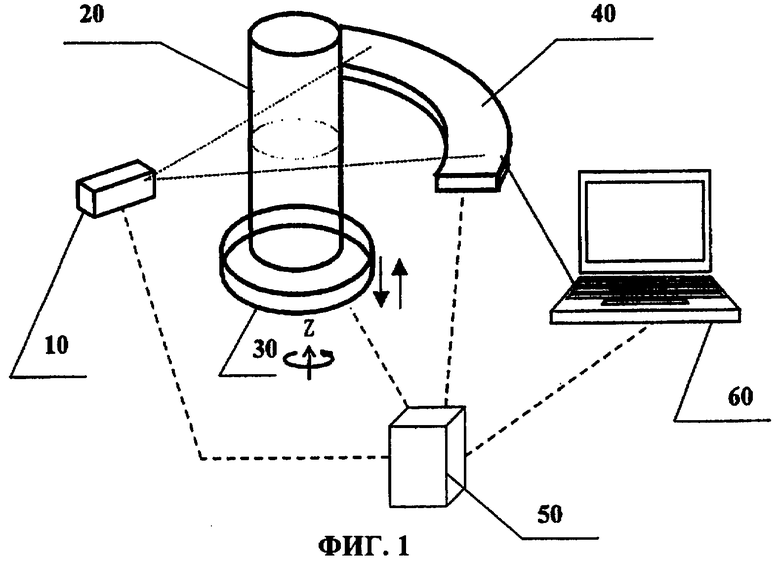
1. Способ радиационного контроля жидких объектов, который содержит следующие стадии:
получение исходной информации об окружении жидкого объекта;
включение потока проникающего излучения для просвечивания жидкого объекта;
прием потока излучения, прошедшего сквозь жидкий объект для формирования массива данных просвечивания объекта под разными углами;
вычисление коэффициента поглощения излучения жидкого объекта путем выполнения обратной операции над массивом данных просвечивания объекта под разными углами с учетом исходной информации об окружении жидкого объекта и его однородности;
сравнение коэффициента поглощения излучения с предварительно записанными данными для получения соответствующей информации по жидкому объекту, подлежащему проверке.
2. Способ по п.1, в котором исходная информация об окружении жидкого объекта, подлежащего проверке, содержит информацию о его геометрических границах.
3. Способ по п.2, в котором информацию о геометрических границах получают с использованием радиографии или сканирования для получения изображений.
4. Способ по п.2, в котором жидкий объект, подлежащий проверке, обладает однородностью в отношении излучения.
5. Установка радиационного контроля жидких объектов, которая содержит:
источник (10) излучения для создания потока проникающего излучения;
несущий механизм (30) для удерживания жидкого объекта так, чтобы через него проходил поток проникающего излучения;
устройство (40) приема излучения и сбора данных для получения исходной информации об окружении жидкого объекта, подлежащего проверке, и данных его просвечивания под разными углами; и
устройство (60, 60') компьютерной обработки данных,
которое содержит:
устройство вычисления коэффициента поглощения излучения жидкого объекта, подлежащего проверке, путем выполнения обратной операции над массивом данных просвечивания объекта под разными углами, причем исходная информация об окружении жидкого объекта и его однородность являются граничными условиями; и
устройство сравнения коэффициента поглощения излучения с предварительно записанными данными для получения соответствующей информации по жидкому объекту, подлежащему проверке.
6. Установка по п.5, в которой источник (10) излучения является рентгеновским аппаратом или радиоизотопным источником.
7. Установка по п.6, в которой используется один источник (10) излучения или несколько таких источников.
8. Установка по п.6, в которой источник (10) излучения имеет регулируемую интенсивность.
9. Установка по п.5, в которой детектор и устройство сбора данных встроены в устройство приема излучения и сбора данных.
10. Установка по п.9, в которой в качестве детектора используется твердотельный, жидкий, газовый или полупроводниковый детектор.
11. Установка по п.9, в которой используется один детектор или несколько таких детекторов.
12. Установка по п.9, в которой детектор выполнен в форме одномерной линейки или двухмерной матрицы приемных элементов.
13. Установка по п.9, в которой детектор снабжен функцией включения энергии.
14. Установка по п.9, в которой детектор работает в режиме интегрирования или в импульсном режиме.
15. Установка по п.9, в которой массив данных просвечивания объекта под разными углами получают путем вращения жидкого объекта, подлежащего проверке, или вращением источника излучения и устройства приема излучения и сбора данных.
16. Установка по п.9, в которой массив данных просвечивания объекта под разными углами получают путем увеличения количества углов просвечивания или смещением детектора на 1/4 размера приемного элемента.
17. Установка по п.5, в которой в устройстве компьютерной обработки данных сравнение осуществляется путем выполнения заранее заданного алгоритма.
18. Установка по п.5, в которой синхронизация работы источника излучения, устройства приема излучения и сбора данных, несущего механизма и устройства компьютерной обработки данных осуществляется контроллером (50) сканирования.
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ТЕКУЧЕЙ СРЕДЫ И КЛАПАННЫЙ МЕХАНИЗМ | 2006 |
|
RU2420683C2 |
| US 6795522 В, 21.09.2004 | |||
| US 6418189 В, 09.07.2002 | |||
| US 7050533 B2, 23.05.2006 | |||
| US 7092485 B2, 15.08.2006 | |||
| Устройство для рентгенофлуоресцентного анализа жидкостей | 1988 |
|
SU1636748A1 |
| РЕНТГЕНОВСКИЙ СПОСОБ ОБНАРУЖЕНИЯ ВЕЩЕСТВА ПО ЗНАЧЕНИЮ ЕГО ЭФФЕКТИВНОГО АТОМНОГО НОМЕРА | 1995 |
|
RU2095795C1 |

