ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области радиационного досмотра, в частности к способам досмотра грузов с использованием просвечивания излучением под разными углами.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Досмотр грузов имеет большое значение в таких областях, как антитеррористическая деятельность и борьба с провозом наркотиков и контрабандных товаров. После террористических нападений террористов в Соединенных Штатах 11 сентября 2001 г. во всех странах все больше внимания уделяется досмотру грузов и багажа в гражданской авиации. В то же время требования к досмотру различных грузов становятся все выше и выше по мере всестороннего расширения борьбы с провозом наркотиков и контрабандных товаров. Ряд серьезных мер предпринят для обеспечения досмотра багажа пассажиров и грузовых контейнеров в общественных местах, таких как аэропорты, вокзалы, таможенные терминалы и порты.
В области медицинской диагностики и неразрушающего контроля в промышленности сейчас широко используется технология компьютерной томографии (КТ-технология). Потребность в применении этой технологии для обеспечения общественной безопасности постоянно растет. В технике КТ-сканирования наиболее распространены способы сканирования с круговыми траекториями источника излучения и детекторов вокруг объекта. Такое сканирование не требует сложных механических конструкций и может быть легко реализовано на практике. Кроме того, соответствующий алгоритм реконструкции изображений в достаточной степени разработан и имеет высокую надежность. В системе с круговыми траекториями источника излучения и детекторов обычно используется КТ-сканирование с веерным или коническим лучом. Используемые системы детекторов представляют собой линейки детекторов или двумерные матрицы детекторов. Источник рентгеновского излучения и детектор располагаются симметрично относительно оси вращения стола с объектом.
При КТ-сканировании достаточно больших объектов вместе с вращением используется поступательное движение. То есть объект, подлежащий досмотру, вращается вокруг центральной оси, а источник радиации и детектор одновременно перемещаются в направлении, параллельном оси вращения, в результате чего формируется спиральная траектория, охватывающая досматриваемый объект. Для объекта с большой площадью поперечного сечения необходимо получать большое количество проекций, если требуется точная реконструкция. Это приводит к существенному снижению скорости досмотра и, соответственно, эффективность досмотровой установки будет очень низкой. Кроме того, большое количество информации, возможно, не имеет существенного значения. Поэтому досмотровые системы с таким КТ-сканированием практически непригодны для использования в аэропортах, где ежедневно необходимо осуществлять досмотр большого количества грузов.
Кроме того, при получении перспективных изображений проявляется недостаток, связанный с перекрытием объектов, если несколько объектов находятся на пути распространения пучка излучения. В общем случае очень трудно различать в этом случае один объект от другого, и потому возникают большие трудности для выявления контрабандных товаров.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
(I) Техническая проблема, которая должна быть разрешена
Целью изобретения является создание способа досмотра грузов с использованием просвечивания излучением под разными углами, которое позволяет устранить недостатки известных досмотровых установок.
(II) Техническое решение
Для достижения указанной цели в настоящем изобретении предлагается следующее техническое решение:
Способ досмотра грузов с использованием просвечивания излучением под разными углами для досмотра грузов с помощью досмотровой установки, которая содержит источник радиации для генерации пучка излучения для просвечивания объекта, подлежащего досмотру, и блок сбора данных для получения проекционных данных при просвечивании досматриваемого объекта излучением, причем способ содержит стадию сканирования, содержащую: вращение источника радиации и/или досматриваемого объекта вокруг оси вращения для относительного поворота на заданный угол, в результате чего источник радиации устанавливается в дискретные положения под разными углами относительно досматриваемого объекта, причем для каждого такого угла источник излучения совершает прямолинейное движение параллельно оси вращения и в то же время осуществляет сканирование досматриваемого объекта для получения проекционных данных при просвечивании объекта по каждым таким углом.
В одном из вариантов осуществления изобретения относительный поворот достигается за счет удерживания источника радиации в неподвижном положении и вращения досматриваемого объекта. В другом варианте осуществления изобретения относительный поворот достигается за счет удерживания досматриваемого объекта в неподвижном положении и вращения источника радиации вокруг досматриваемого объекта.
Предпочтительно источник радиации и блок сбора информации расположены с противоположных сторон досматриваемого объекта, причем на стадии сканирования блок сбора информации перемещается синхронно с источником радиации.
Предпочтительно набор дискретных положений под разными углами представляет собой набор угловых положений, равномерно распределенных по окружности.
Предпочтительно количество дискретных положений под разными углами находится в диапазоне от 3 до 70 угловых положений. Более предпочтительно количество дискретных положений под разными углами находится в диапазоне от 4 до 60 угловых положений. Еще более предпочтительно количество дискретных положений под разными углами находится в диапазоне от 8 до 50 угловых положений. Еще более предпочтительно количество дискретных положений под разными углами находится в диапазоне от 10 до 40 угловых положений. Наиболее предпочтительно количество дискретных положений под разными углами находится в диапазоне от 15 до 25 угловых положений.
Предпочтительно в двух соседних угловых положениях источник радиации перемещается прямолинейно в противоположных направлениях.
Предлагаемый в настоящем изобретении способ содержит дополнительно стадию получения изображения досматриваемого объекта на основе проекционных данных, полученных блоком сбора информации.
Предпочтительно на стадии получения изображения для каждого углового положения двумерное перспективное изображение досматриваемого объекта получают с использованием проекционных данных для каждого углового положения.
Предпочтительно набор дискретных положений под разными углами содержит по меньшей мере три таких положения. Предпочтительно на стадии получения изображения осуществляется реконструкция трехмерного изображения досматриваемого объекта с использованием объединения проекционных данных, полученных для указанных различных угловых положений.
Предпочтительно указанная реконструкция выполняется с использованием алгоритмов обратного проецирования с фильтрацией, максимизации ожидания или статистической обработки упорядоченных подмножеств.
(III) Достоинства и преимущества изобретения
1. Траектория сканирования в предложенном в изобретении способе несколько отличается от траекторий КТ-сканирования или спирального КТ-сканирования, известных в технике. В предложенном способе источник радиации перемещается по прямолинейным параллельным траекториям, находящимся под разными углами относительно досматриваемого груза, для получения проекционных данных для просвечивания объекта под разными углами. Такое сканирование может быть выполнено за меньшее время. По сравнению с КТ-сканированием или спиральным сканированием, используемыми в технике, проекционные данные, получаемые при использовании предложенного способа, являются неполными для построения трехмерного изображения, однако, в этом случае можно получить трехмерное изображение, которое максимально возможно удовлетворяет требованиям точности при условии выполнения требования к скорости досмотра за счет соответствующего выбора количества дискретных угловых положений, то есть устанавливается баланс между скоростью сканирования и точностью построения изображений.
2. Предложенный в настоящем изобретении способ позволяет выполнять быстрый досмотр груза (например, авиационного контейнера), в результате чего существенно повышается эффективность досмотра грузов и, таким образом, выполняется требование по быстрому досмотру большого количества грузов в аэропортах.
3. Поскольку в настоящем изобретении может выполняться реконструкция трехмерного изображения груза, то эффективно решается проблема, связанная с перекрытием объектов в грузе, при реконструкции перспективного изображения, в результате чего эффективно повышается точность досмотра объектов и существенно облегчается обнаружение контрабанды.
4. Предложенный в изобретении способ может быть осуществлен в существующих досмотровых установках, поэтому в таких установках можно получать обычные перспективные изображения и КТ-изображения и, кроме того, может быть реализован предложенный способ, так что обеспечивается более гибкая система досмотра грузов.
КРАТКОЕ ОПИСАНИЕ ПРИЛАГАЕМЫХ ЧЕРТЕЖЕЙ
Фигура 1 - общая схема известной установки досмотра грузов;
фигура 2 - общая схема установки досмотра грузов с использованием просвечивания излучением под разными углами, в которой осуществляется предлагаемый в настоящем изобретении способ;
фигура 3 - общая схема обычного кругового сканирования веерным лучом;
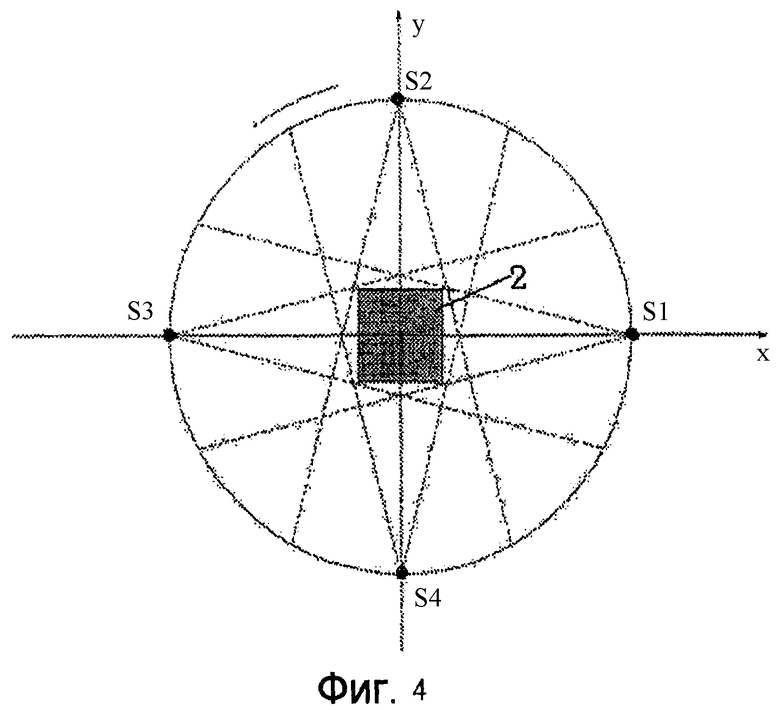
фигура 4 - общая схема установки сканирования под разными углами установки досмотра грузов, в которой осуществляется предлагаемый в изобретении способ;
фигуры 5а и 5b - результаты моделирования на модели Шеппа-Логана.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Для того чтобы техническое решение, предложенное в настоящем изобретении, было более ясным и понятным, изобретение будет описано ниже подробно на примерах вариантов его осуществления со ссылками на прилагаемые чертежи.
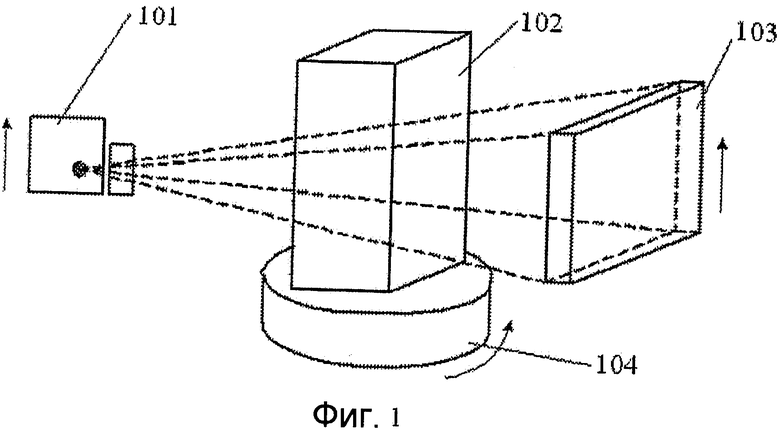
На фигуре 1 представлена общая схема известной установки досмотра грузов, которая может быть использована для осуществления предлагаемого в изобретении способа. Источник 101 радиации испускает рентгеновские лучи или пучок другого излучения для просвечивания груза 102. Этот пучок излучения проходит сквозь груз 102 (в одном из примеров груз 102 представляет собой авиационный контейнер), установленный на вращающемся столе 104. Проекционные данные после прохождения излучения сквозь груз получают в блоке 103 сбора информации (например, матрица детекторов) и затем эти данные передаются в главный компьютер управления и обработки информации (не показан). Блок 103 сбора информации располагается напротив источника 101 радиации. Таким образом, блок сбора информации и источник радиации располагаются симметрично относительно центральной оси вращающегося стола. Главный компьютер управления и обработки данных обеспечивает интерфейс взаимодействия человек-машина, осуществляет реконструкцию изображения по полученным проекционным данным и отображает реконструированные изображения. Вращающийся стол 104 обеспечивает вращение груза 102.
Такая установка досмотра грузов обычно содержит также транспортировочное устройство (см. фигуру 2) для транспортировки контейнера на вращающийся стол и для удаления контейнера со стола после выполнения досмотра. Такая установка досмотра грузов обычно содержит также подъемное устройство сканирования (не показано) для перемещения источника радиации и детекторов, которое обеспечивает их синхронный подъем и спуск. Такое подъемное устройство сканирования может содержать два комплекта подъемных платформ, на которых монтируется источник радиации и блок сбора информации. Кроме того, подъемные платформы могут быть также снабжены горизонтальным коллиматором.
Такая система также содержит устройство управления сканированием для управления движением источника радиации, блока сбора информации и вращающегося стола в соответствии с командами, получаемыми из главного компьютера управления и обработки информации.
Для осуществления быстрого и точного досмотра такая установка досмотра грузов обычно содержит также устройство измерения или калибровки следующих системных параметров: расстояние D от источника радиации до блока сбора информации, расстояние R от источника радиации до оси вращения вращающегося стола, положение Р (u, v) источника радиации, размер d пикселя дисплея, на котором осуществляется визуализация информации и угол поворота θ вращающегося стола. Устройство измерения или калибровки для таких систем хорошо известно в технике, и поэтому здесь его подробное описание не приводится.
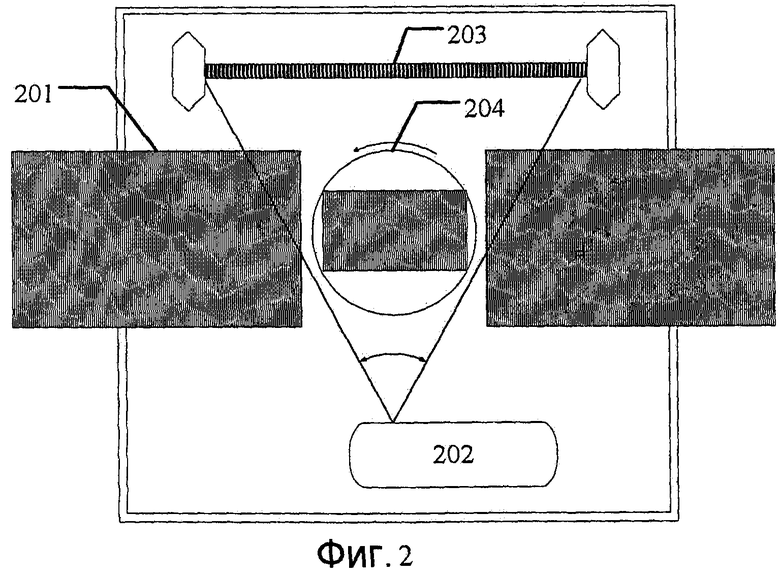
На фигуре 2 представлена общая схема установки досмотра грузов с использованием просвечивания излучением, в которой осуществляется предлагаемый в настоящем изобретении способ. В процессе работы установки груз доставляется на вращающийся стол 204 с помощью роликового транспортера 201. Источник 202 радиации и матрица 203 детекторов расположены с двух сторон от вращающегося стола 204. Вращающийся стол 204 может вращаться непрерывно или может быть повернут на заданный угол. Источник 202 радиации и матрица 203 детекторов могут синхронно подниматься и опускаться, а именно перемещаться в направлении, перпендикулярном плоскости чертежа фигуры 2. Когда вращающийся стол 204 неподвижен, проекционные данные для авиационного контейнера могут быть получены под текущим углом в процессе одного цикла синхронного подъема и спуска источника 202 радиации и матрицы 203 детекторов.
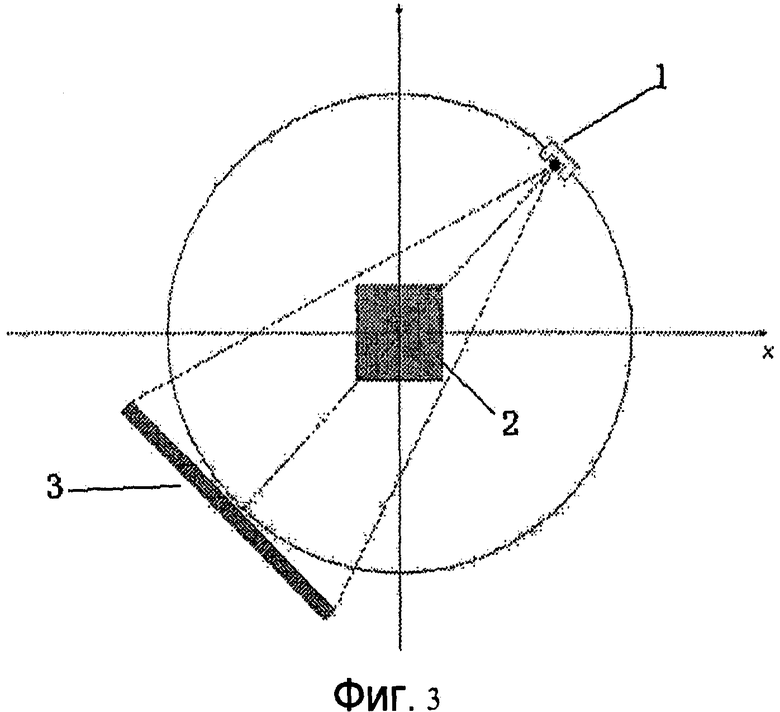
В установке, схема которой представлена на фигуре 2, может быть также реализовано обычное круговое сканирование. Для этого источник 202 радиации и матрица 203 детекторов удерживаются на фиксированной высоте, и вращающийся стол 204 вращает груз с постоянной скоростью для получения проекционных КТ-данных для груза в положении текущего среза. На фигуре 3 представлена общая схема обычного кругового сканирования веерным лучом; на фигуре 3 источник 1 радиации и блок сбора информации 3 расположены по обеим сторонам груза 2. Источник 1 радиации и блок 3 сбора информации двигаются относительно груза 2 по круговой траектории.
Один из вариантов осуществления сканирования в соответствии с предлагаемым в настоящем изобретении способом, который описывается ниже, содержит следующие стадии:
(1) запуск установки, так что осуществляется относительный поворот источника радиации и блока сбора информации относительно груза, и установка источника радиации и блока сбора информации под первым углом относительно груза, причем при выполнении указанного сканирования с использованием установки, схема которой представлена на фигурах 1 и 2, источник радиации и блок сбора информации остаются неподвижными в процессе такого относительного поворота, а груз поворачивается вместе с вращающимся столом; однако, очень легко представить, что в процессе такого относительного поворота остается неподвижным груз, а источник радиации и блок сбора информации поворачиваются вокруг этого груза, причем в этот момент источник радиации и блок сбора информации могут быть расположены возле нижнего края груза;
(2) включение источника радиации, так что он испускает пучок излучения под указанным первым углом для просвечивания груза, удерживаемого на вращающемся столе, и синхронное линейное перемещение источника радиации и блока сбора информации вверх для сканирования груза, причем указанное прямолинейное перемещение перпендикулярно плоскости относительного вращения на стадии (1), например, когда такое относительное вращение выполняется в горизонтальной плоскости, траектория прямолинейного перемещения проходит в вертикальном направлении, иными словами, эта траектория параллельна оси вращения при таком относительного повороте, причем одновременно с испусканием излучения источником радиации блок сбора информации получает проекционные данные, то есть измеряет величину излучения, прошедшего сквозь груз;
(3) остановка источника радиации и блока сбора информации, после того как они достигнут верхнего края досматриваемого груза, причем вращающийся стол поворачивает груз таким образом, что источник радиации оказывается под вторым углом по отношению к грузу, который отличается от первого угла;
(4) включение источника радиации, так что он испускает пучок излучения под указанным вторым углом для просвечивания груза, удерживаемого на вращающемся столе, и перемещается вниз по вертикали, а блок сбора информации перемещается при этом синхронно с источником радиации и получает проекционные данные, то есть измеряет величину излучения, прошедшего сквозь груз;
(5) повторение процесса, аналогичного вышеописанному, пока груз на вращающемся столе не совершит один оборот, так что блок сбора информации получит полный объем проекционных данных при просвечивании груза пучком излучения.
На фигуре 4 показано взаимное расположение источника радиации и груза в одном из вариантов осуществления изобретения. На фигуре 4 источник радиации показан в четырех разных положениях под углами S1, S2, S3 и S4 относительно груза 2. Каждому угловому положению соответствует одно вышеописанное линейное сканирование. В предлагаемом в настоящем изобретении способе различные угловые положения могут быть равномерно разнесены по окружности, как показано на фигуре 4. Количество таких угловых положений может быть выбрано в соответствии с требованиями необходимой скорости сканирования и точности получаемых изображений. Это несложная задача для среднего специалиста в данной области техники. Например, количество таких дискретных угловых положений может находиться в диапазоне от 3 до 70. Для дальнейшего увеличения скорости сканирования количество дискретных угловых положений может находиться в диапазоне от 4 до 60. Для еще большего увеличения скорости сканирования количество дискретных угловых положений может находиться в диапазоне от 8 до 50. Для еще большего увеличения скорости сканирования количество дискретных угловых положений может находиться в диапазоне от 10 до 40. Предпочтительно количество таких дискретных угловых положений может находиться в диапазоне от 15 до 25. Если указанные угловые положения равномерно разнесены по окружности, то угол каждого относительного поворота очень легко определить по заданному количеству угловых положений. Например, если количество угловых положений равно 24, то вращающийся стол поворачивает груз каждый раз на 15 градусов.
На основе проекционных данных, полученных в результате вышеописанного сканирования, главный компьютер управления и обработки информации может выполнить реконструкцию изображения и отобразить его на дисплее. В настоящем изобретении проекционные данные, полученные для каждого угла, могут использоваться для получения двумерного изображения груза для каждого такого угла или могут использоваться объединенные проекционные данные, полученные для разных углов просвечивания, для реконструкции трехмерного изображения досматриваемого груза. Безусловно можно получить двумерное перспективное изображение досматриваемого груза, а также его трехмерное перспективное изображение для каждого угла просвечивания. Когда осуществляется реконструкция трехмерного изображения, предпочтительным является получение проекционных данных как минимум для трех угловых положений.
Такая реконструкция трехмерных изображений может быть выполнена с использованием алгоритма обратного проецирования с фильтрацией (ОПФ), алгоритма максимизации ожидания (МО) или алгоритма максимизации ожидания на упорядоченном подмножестве (МОУП).
При реконструкции изображения с использованием алгоритма ОПФ по проекционным данным, полученным для разных углов, процесс реконструкции содержит следующие стадии:
(1) фильтрацию полученных проекционных данных для разных углов, причем конкретный процесс фильтрации осуществляется следующим образом:
если Fp(ρ, θ) - это одномерное преобразование Фурье проекционных данных, полученных для разных углов в направлении, параллельном плоскости приема блока сбора информации, то проекционные данные, полученные для разных углов, фильтруются в соответствии с формулой
 ,
,
где ρ и θ - радиус и угол, соответственно, в полярной системе координат; и
(2) обратное проецирование профильтрованных проекционных данных, полученных для разных углов, причем конкретный процесс осуществляется следующим образом:
если ₤(x, у) - это реконструированное изображение, то обратное проецирование профильтрованных проекционных данных осуществляется в соответствии с формулой
для получения реконструированного изображения, где х и у - горизонтальная и продольная координаты, соответственно.
При реконструкции изображения с использованием алгоритма МО по проекционным данным, полученным для разных углов, процесс реконструкции содержит следующие две стадии: стадию вычисления математического ожидания условной функции правдоподобия и вычисление максимума функции ожидания.
Процесс МО описан далее подробно на конкретном примере:
(1) допустим, что x - реконструированное изображение, aij - коэффициент матрицы проекций, и начальное значение m=0,₤m положительно;
(2) выполняются следующие стадии до схождения процесса:
а) х1=₤m, m=m+1;
b) вычисляется значение проекции, где
 , t∈Si;
, t∈Si;
c) обратное проецирование значения проекции,
 , j=1, 2, …, J
, j=1, 2, …, J
d) получение ₤m=x'.
Алгоритм МОУП аналогичен алгоритму МО, однако, скорость схождения процесса будет выше, чем при МО, и качество изображения будет сопоставимо с качеством изображения, получаемого при МО. В настоящем изобретении может также использоваться алгоритм МОУП. При реконструкции изображения с использованием алгоритма МОУП по проекционным данным, полученным для разных углов, процесс реконструкции содержит следующие стадии:
(1) допустим, что х - реконструированное изображение, aij - коэффициент матрицы проекций, и начальное значение m=0, ₤m положительно;
(2) выполняются следующие стадии до схождения процесса:
а) х1=₤m, m=m+1;
b) вычисляются значения проекции для каждого подмножества i=1, 2, …, n,
где  , t∈Si,
, t∈Si,
и выполняется обратное проецирование значения проекции,
где  , j=1, 2, …, J
, j=1, 2, …, J
с) получение ₤m=x'.
После завершения процесса реконструкции проекционных данных, полученных для разных углов, главный компьютер управления и обработки данных отображает реконструированное изображение. Примеры реконструированных изображений приведены на фигурах 5. На фигурах 5а и 5b представлены результаты моделирования на модели Шеппа-Логана.
Кроме того, в установке, в которой осуществляется изобретение, также может использоваться режим сканирования для двух углов и режим сканирования КТ-среза.
В режиме сканирования для двух углов в установке получают только двумерное перспективное изображение для двух взаимно перпендикулярных углов, и на дисплее компьютера отображаются одновременно два перспективных вида для анализа оператором. Этот режим характеризуется малым временем сканирования и, соответственно, высокой производительностью досмотровой установки. Однако в этом случае оператор должен обладать хорошим опытом анализа таких изображений.
В режиме сканирования КТ-среза установка сначала получает проекционные КТ-данные для заданного положения среза авиационного контейнера и затем генерирует КТ-изображение для этого положения путем реконструкции данных и в случае необходимости вырабатывает сигнал тревоги. Поскольку такое изображение среза может отражать величину и характер распределения плотности материала груза в соответствующей части, то точность определения искомых материалов в этом случае гораздо выше, однако, время сканирования увеличивается.
В предлагаемом в настоящем изобретении режиме сканирования под разными углами установка непрерывно получает двумерные перспективные изображения под разными углами, приближенно реконструирует пространственные данные для всего объекта путем реконструкции по неполным данным и отображает их на дисплее компьютера для анализа оператором. Кроме того, через интерфейс человек-машина могут осуществляться действия оператора в режиме реального времени в отношении интересующих его проекционных данных, и наиболее подозрительные зоны отображаются более наглядно. В этом режиме установка может осуществлять предварительное предупреждение об опасных объектах, таких как, например, взрывчатка. Кроме того, время сканирования в этом случае не очень велико. Поэтому этот режим является предпочтительным режимом сканирования для настоящего изобретения.
Установка может автоматически переключаться между этими тремя режимами сканирования, и для переключения не требуется дополнительного времени. Поэтому различные режимы сканирования могут гибко использоваться в процессе практического применения в соответствии с требованием оценки риска для авиационного контейнера или с уровнем безопасности конкретного аэропорта. При условии сокращения времени досмотра выбирается режим сканирования под двумя углами, и при обычных условиях сначала используется режим сканирования под разными углами и затем выполняется сканирование КТ-среза в соответствии с конкретным положением подозрительного авиационного контейнера, решение по которому не может быть принято на основе пространственной информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ДОСМОТРА ГРУЗОВ | 2007 |
|
RU2386954C1 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ СПИРАЛЬНОГО СКАНИРОВАНИЯ | 2007 |
|
RU2396551C1 |
| УСТАНОВКА И СПОСОБ ОБНАРУЖЕНИЯ КОНТРАБАНДЫ В АВИАЦИОННЫХ ГРУЗОВЫХ КОНТЕЙНЕРАХ | 2008 |
|
RU2390006C1 |
| УСТАНОВКА ДЛЯ ОБНАРУЖЕНИЯ КОНТРАБАНДЫ В АВИАЦИОННЫХ ГРУЗОВЫХ КОНТЕЙНЕРАХ | 2008 |
|
RU2390761C1 |
| СПОСОБ И УСТАНОВКА (ВАРИАНТЫ) ДЛЯ ДОСМОТРА ОБЪЕКТОВ, СОДЕРЖАЩИХ ЖИДКОСТИ | 2008 |
|
RU2445609C2 |
| СПОСОБ И УСТАНОВКА РАДИАЦИОННОГО КОНТРОЛЯ ЖИДКИХ ОБЪЕКТОВ | 2006 |
|
RU2372610C1 |
| КОМПЬЮТЕРНЫЙ ТОМОГРАФ | 2013 |
|
RU2553184C1 |
| ТОМОГРАФИЧЕСКАЯ СКАНИРУЮЩАЯ ДОСМОТРОВАЯ УСТАНОВКА И СПОСОБ СКАНИРОВАНИЯ | 2008 |
|
RU2383882C2 |
| СИСТЕМЫ СПИРАЛЬНОЙ КТ И СПОСОБЫ РЕКОНСТРУКЦИИ | 2015 |
|
RU2595312C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИСТОЧНИКОМ ИЗЛУЧЕНИЯ, УСТАНОВКА И СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ | 2006 |
|
RU2383883C2 |

Использование: досмотр грузов с использованием проникающего излучения. Сущность: заключается в том, что осуществляют вращение источника радиации и/или досматриваемого объекта вокруг оси вращения для относительного поворота на заданный угол, в результате чего источник радиации устанавливается в дискретные положения под разными углами относительно досматриваемого объекта, причем для каждого такого угла источник излучения совершает прямолинейное движение параллельно оси вращения и в то же время осуществляет сканирование досматриваемого объекта для получения проекционных данных при просвечивании объекта для каждого такого угла. Технический результат: обеспечение возможности быстрого досмотра большого количества грузов при достаточно высоком качестве построения изображений предметов внутри контролируемого объекта. 13 з.п. ф-лы, 5 ил.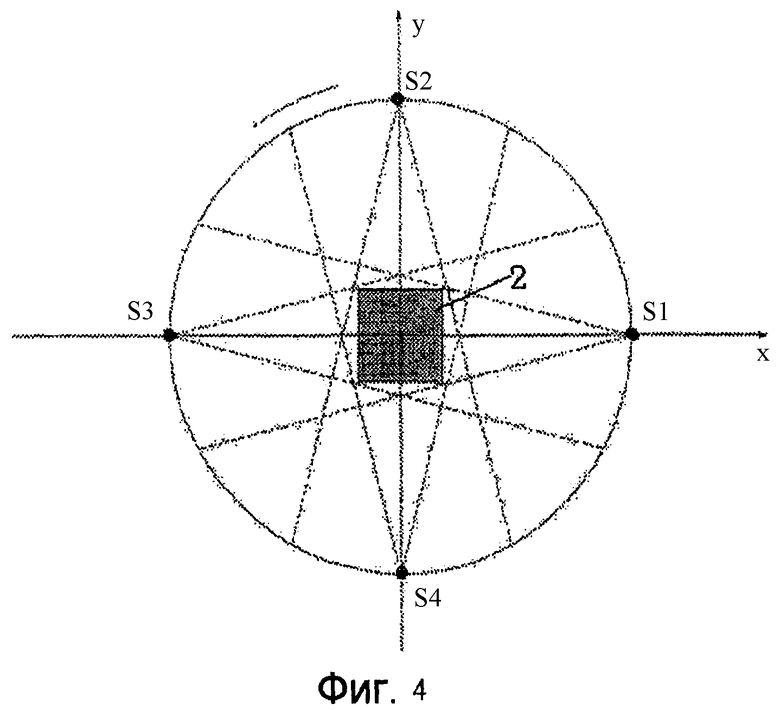
1. Способ досмотра грузов с использованием просвечивания излучением под разными углами с помощью досмотровой установки, которая содержит источник радиации для генерации пучка излучения для просвечивания объекта, подлежащего досмотру, и блок сбора информации для получения проекционных данных при просвечивании излучением досматриваемого объекта, причем способ содержит стадию сканирования, которая содержит: вращение источника радиации и/или досматриваемого объекта вокруг оси вращения для относительного поворота на заданный угол, в результате чего источник радиации устанавливается в дискретные положения под разными углами относительно досматриваемого объекта, причем для каждого такого угла источник излучения совершает прямолинейное движение параллельно оси вращения и в то же время осуществляет сканирование досматриваемого объекта для получения проекционных данных при просвечивании объекта для каждого такого угла.
2. Способ по п.1, в котором источник радиации и блок сбора информации расположены с противоположных сторон досматриваемого объекта, причем на стадии сканирования блок сбора информации перемещается синхронно с источником радиации.
3. Способ по п.1, в котором набор дискретных положений под разными углами представляет собой набор угловых положений, равномерно распределенных по окружности.
4. Способ по п.1 или 3, в котором количество дискретных положений под разными углами находится в диапазоне от 3 до 70 угловых положений.
5. Способ по п.4, в котором количество дискретных положений под разными углами находится в диапазоне от 4 до 60 угловых положений.
6. Способ по п.5, в котором количество дискретных положений под разными углами находится в диапазоне от 8 до 50 угловых положений.
7. Способ по п.6, в котором количество дискретных положений под разными углами находится в диапазоне от 10 до 40 угловых положений.
8. Способ по п.7, в котором количество дискретных положений под разными углами находится в диапазоне от 15 до 25 угловых положений.
9. Способ по п.1, в котором в двух соседних угловых положениях источник радиации перемещается прямолинейно в противоположных направлениях.
10. Способ по п.1, содержащий дополнительно стадию получения изображения досматриваемого объекта на основе проекционных данных, полученных блоком сбора информации.
11. Способ по п.10, в котором на стадии получения изображения для каждого углового положения осуществляется построение двумерного перспективного изображения досматриваемого объекта с использованием проекционных данных для каждого углового положения.
12. Способ по п.10, в котором набор дискретных положений под разными углами содержит по меньшей мере три таких положения.
13. Способ по п.11 или 12, в котором на стадии получения изображения осуществляется реконструкция трехмерного изображения досматриваемого объекта с использованием объединения проекционных данных, полученных для указанных различных угловых положений.
14. Способ по п.13, в котором указанная реконструкция выполняется с использованием алгоритмов обратного проецирования с фильтрацией, максимизации ожидания или статистической обработки упорядоченных подмножеств.
| US 2005276376 A1, 15.12.2005 | |||
| US 4472822 А, 18.09.1984 | |||
| US 4422177 А, 20.12.1983 | |||
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ТЕКУЧЕЙ СРЕДЫ И КЛАПАННЫЙ МЕХАНИЗМ | 2006 |
|
RU2420683C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ВЗРЫВЧАТОГО ВЕЩЕСТВА В ОБЪЕМЕ, НАПРИМЕР В БАГАЖЕ, И АППАРАТУРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2161820C2 |
| Томографическое вычислительное устройство | 1980 |
|
SU950204A3 |

