ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройствам для проверки (досмотра) грузов и, более конкретно, к устройствам и способам обнаружения контрабанды в авиационных грузах.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В настоящее время авиационные грузы, находящиеся, например, в авиационных контейнерах, досматриваются в основном вручную и путем просвечивания рентгеновским излучением, причем через досмотровые установки могут проходить авиационные контейнеры только небольших размеров. Также для досмотра грузов применяются устройства, в которых используются технологии компьютерной томографии (КТ-технологии), например установки компании Smith Corporation, источниками излучения в которых являются рентгеновские трубки, и установки компании Hualixing Company, в которых используются радиоактивные источники. Вышеуказанные установки имеют серьезные ограничения, поскольку рентгеновские лучи имеет сравнительно невысокую проникающую способность, а в отношении радиоактивных источников существуют строгие правила, регламентирующие их использование и обращение с ними. В частности, в этих установках используется сканирование горизонтально проходящего объекта для выполнения досмотра с получением КТ-изображений, то есть объект проходит горизонтально и сканирующая система вращается вокруг направления движения объекта, так что такие КТ-установки обеспечивают сравнительно невысокую скорость прохождения досматриваемых грузов. Кроме того, такие досмотровые КТ-системы имеют строгие ограничения по конструкции, размерам и проникающей способности излучения, так что они не могут быть использованы для досмотра авиационных контейнеров, имеющих сравнительно большие размеры. Например, современные досмотровые установки не способны обеспечивать проверку авиационных контейнеров, имеющих длину 2 м и ширину 2 м. Кроме того, вышеуказанное сканирование горизонтально проходящего груза требует дополнительной площади справа и слева от направления движения груза, так что такие установки занимают сравнительно большую площадь.
В технике досмотровых систем развивались различные технологии получения изображений с использованием просвечивания излучением, такие как получение изображений в режиме просвечивания, получение изображений в режиме просвечивания под разными углами и КТ-технологии. Указанные различные типы технологий получения изображений, в общем, соответствуют различным типам сканирования грузов в сканирующих системах. В известных досмотровых установках в общем случае может быть реализован только один из режимов сканирования, так что выбор режима получения изображения ограничен. Однако при досмотре грузов иногда требуется использовать различные режимы сканирования для получения изображений для одного и того же груза. Современные досмотровые системы не обеспечивают такой возможности.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является преодоление по меньшей мере одного из указанных недостатков известных систем.
Для достижения указанной цели в настоящем изобретении предлагается установка для обнаружения контрабанды в авиационных грузовых контейнерах, содержащая:
поворотный стол, установленный в месте проведения досмотра объекта и предназначенный для удерживания досматриваемого объекта и приведения его во вращение;
систему транспортировки досматриваемого объекта для его перемещения в горизонтальном направлении к поворотному столу и для перемещения объекта от поворотного стола после завершения операции досмотра;
сканирующую систему, которая размещена вокруг поворотного стола и предназначена для сканирования досматриваемого объекта с целью получения информации для построения изображений, причем сканирующая система содержит источник излучения и детектор, которые могут синхронно перемещаться по вертикали;
подсистему привода и управления поворотным столом, которая осуществляет привод поворотного стола и управляет его вращением, так что может обеспечиваться непрерывное вращение поворотного стола вокруг его оси вращения или его установка в любое заданное угловое положение;
подсистему привода и управления сканирующей системой, которая управляет и обеспечивает синхронное перемещение источника излучения и детектора по вертикали, так чтобы источник излучения и детектор могли синхронно перемещаться вверх или вниз или устанавливаться в любое заданное положение по вертикали;
главный компьютер управления, обеспечивающий интерфейс взаимодействия "человек-машина" для управления работой установки в соответствии с командами оператора. Компьютер выполняет также несколько других функций, таких как обработка данных, реконструкция изображений, визуализация изображений.
В предлагаемой в настоящем изобретении установке поворотный стол может быть приведен в непрерывное вращение или повернут в любое заданное угловое положение, а сканирующая система (включая источник излучения и детектор) может находиться в непрерывном движении или может быть перемещена в любое заданное положение по вертикали. При этом за счет сочетания различных режимов движения поворотного стола и сканирующей системы предлагаемая в настоящем изобретении установка может обеспечивать сканирование досматриваемого объекта в различных режимах сканирования. Оператор может выбирать и включать один или несколько режимов сканирования, исходя из практических условий работы и требований досмотра, после чего в различных режимах осуществляется построение изображений с использованием соответствующих алгоритмов. Таким образом, предлагаемая в настоящем изобретении установка представляет собой многофункциональную комплексную досмотровую систему.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
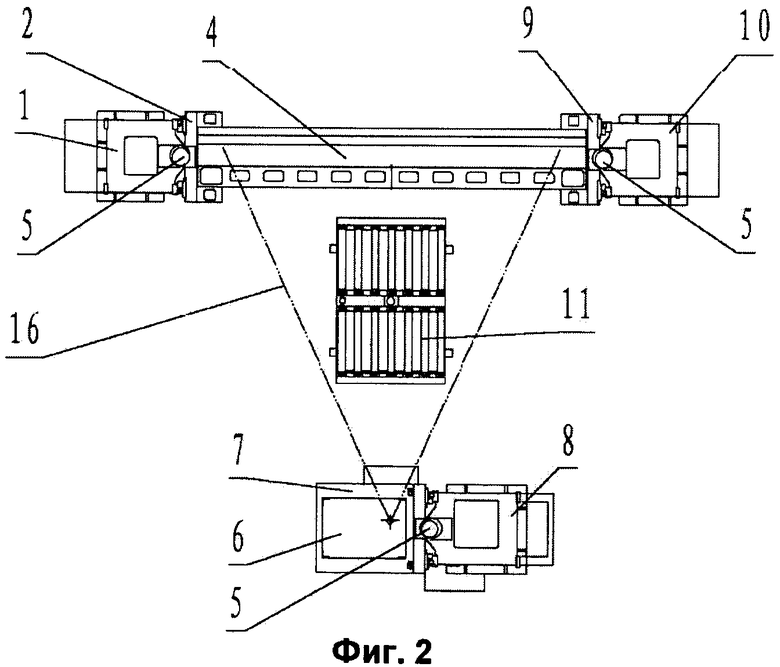
Фиг.1 - вид сбоку первого варианта осуществления предлагаемой в настоящем изобретении установки.
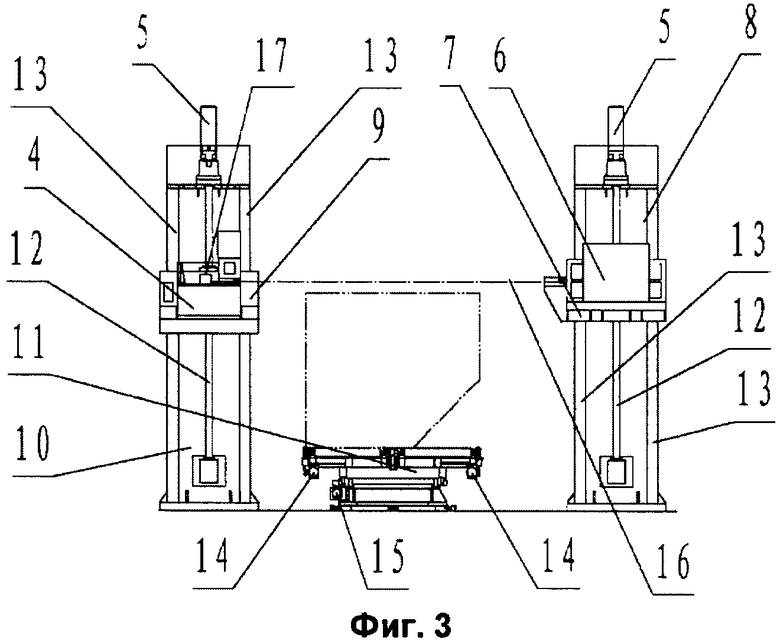
Фиг.2 - вид сверху установки в соответствии с вариантом, представленным на фиг.1.
Фиг.3 - вид слева установки в соответствии с вариантом, представленным на фиг.1.
ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг.1-3 представлен вариант установки для обнаружения контрабанды в авиационных грузовых контейнерах в соответствии с настоящим изобретением. Как можно видеть на фигурах, установка содержит поворотный стол 1, расположенный в месте досмотра объекта и предназначенный для удерживания досматриваемого объекта (не показан), такого как, например, авиационный контейнер, и приведения досматриваемого объекта во вращение. Кроме того, установка содержит систему транспортировки досматриваемого объекта (не показана), которая хорошо известна специалистам в данной области техники и которая предназначена для перемещения объекта по горизонтали к поворотному столу и перемещения объекта от поворотного стола после завершения процедуры досмотра. Система транспортировки досматриваемого объекта вместе с поворотным столом называется далее транспортной системой. Поворотный стол 11 размещается на пути транспортировки досматриваемого объекта системой транспортировки. В одном из вариантов осуществления изобретения в качестве поворотного стола 11 используется составной вращающийся стол, обеспечивающий перемещение досматриваемого объекта. В китайской патентной заявке №200610169797.3, находящейся в совместной собственности, раскрывается составной вращающийся стол, и указанная заявка полностью включается ссылкой в настоящую заявку. Составной вращающийся стол может не только транспортировать досматриваемый объект через досмотровый туннель, но также служит опорой для объекта и может приводить его во вращение в досмотровом туннеле. Таким образом, когда досматриваемый объект должен сканироваться с вращением, то вращается не сканирующая система (ниже описана подробно) вокруг досматриваемого объекта, а сам объект.
Кроме того, установка содержит подсистему привода и управления поворотным столом (не показана), которая осуществляет привод поворотного стола и управляет его вращением, так что может обеспечиваться непрерывное вращение поворотного стола вокруг его оси вращения или его установка в любое заданное угловое положение. Подсистема привода и управления поворотным столом в общем случае содержит электродвигатель и устройство сервоуправления этим электродвигателем.
Установка содержит также сканирующую систему, которая размещена вокруг поворотного стола и предназначена для сканирования досматриваемого объекта с целью получения информации для построения изображений. Как показано на фигурах, сканирующая система содержит источник 6 излучения и детектор 17, расположенные по обеим сторонам от поворотного от стола 11. Источник 6 излучения и детектор 17 могут синхронно перемещаться по вертикали, так чтобы детектор 17 всегда находился в горизонтальной плоскости 16 лучей, испускаемых источником 6 излучения. В качестве источников 6 излучения могут использоваться регулируемые источники рентгеновских лучей или гамма-лучей, линейный ускоритель электронов, радиоизотопный источник или рентгеновская трубка. Детектор 17, преобразующий излучение, прошедшее сквозь досматриваемый объект, в электрические сигналы может быть твердотельным или газовым детектором. Детектор может состоять из одной или нескольких плоских или криволинейных матриц датчиков высокой или низкой энергии. Сканирующая система может также содержать устройство сбора данных, предназначенное для преобразования электрических сигналов детектора в цифровые сигналы и передачи их в главный компьютер управления по общей шине или по сети Ethernet. Устройство сбора данных может размещаться в самом детекторе 17.
Кроме того, сканирующая система содержит опорную конструкцию источника излучения, на которой устанавливается источник 6 излучения, и опорную конструкцию детектора, на которой устанавливается детектор 17. Опорная конструкция источника излучения и опорная конструкция детектора расположены по обеим сторонам от поворотного стола 11. В состав опорных конструкций источника излучения или детектора входит один или несколько узлов колонн. В одном из вариантов осуществления изобретения каждая из указанных опорных конструкций содержит один или несколько узлов колонн. В одном из вариантов осуществления изобретения все узлы колонн имеют практически одинаковую конструкцию. Как показано на фиг.1-3, опорная конструкция источника излучения предпочтительно содержит один узел колонн, а опорная конструкция детектора предпочтительно содержит два узла колонн, так чтобы формировалась платформа сканирования на трех колоннах. Такая конструкция в максимальной степени уменьшает размер площади, занимаемой установкой, и при этом обеспечивается устойчивость детектора и источника излучения. Кроме того, для дополнительного уменьшения площади, занимаемой установкой, детектор, установленный на двух узлах колонн, предпочтительно является плоской матрицей датчиков. Плоская матрица датчиков занимает меньшую площадь по сравнению с матрицей датчиков, имеющей форму криволинейной поверхности.
Как можно видеть на фиг.1-3, колонны 8, 1 или 10 установлены вертикально, причем опорная конструкция источника излучения содержит колонну 8, а опорная конструкция детектора содержит колонны 1 и 10. На каждой колонне установлен подъемный механизм, обеспечивающий перемещение вдоль колонны, причем источник излучения и детектор установлены на подъемных механизмах. Каждый подъемный механизм содержит ходовой винт 12 и подъемную платформу 7, 2 или 9, которая может перемещаться вдоль колонны. Как показано на фиг.1-3, ссылочным номером 7 обозначена подъемная платформа, установленная на узле колонн опорной конструкции источника излучения, и ссылочными номерами 2 и 9 обозначены подъемные платформы, установленные на двух узлах колонн опорной конструкции детектора. Подъемные платформы 7, 2 или 9 установлены на ходовых винтах 12 и соединены с ними с помощью резьбовых соединений, а источник 6 излучения и детектор 17 жестко закреплены на подъемных платформах. Таким образом, при вращении ходового винта 12 подъемная платформа 7, 2 или 9 может подниматься или опускаться вдоль ходового винта 12 за счет взаимодействия с имеющейся на нем резьбой. В одном из вариантов осуществления изобретения подъемная платформа может иметь резьбовое соединение с ходовым винтом с использованием гайки, жестко закрепленной на подъемной платформе и навернутой на ходовой винт. В другом варианте осуществления изобретения подъемная платформа содержит проход с резьбой, в который вворачивается ходовой винт. Подъемный механизм может также содержать по меньшей мере один направляющий рельс, проходящий вдоль колонны, так что подъемная платформа может скользить по направляющему рельсу, в результате чего обеспечивается ее подъем и опускание. Как показано на фигурах, подъемный механизм предпочтительно содержит два направляющих рельса 13, расположенных по обеим сторонам от ходового винта 12. В одном из вариантов осуществления изобретения подъемная платформа соединена с направляющими рельсами с возможностью скольжения по нему с использованием ползуна, который может скользить по направляющему рельсу и жестко соединен с подъемной платформой. В другом варианте осуществления изобретения подъемная платформа может иметь сквозной проход, сквозь который проходит направляющий рельс. Если опорная конструкция детектора или опорная конструкция источника излучения содержит несколько узлов колонн, то такая опорная конструкция может содержать дополнительно соединительные балки между парами соседних колонн для повышения устойчивости многоколонной конструкции. Как показано на фиг.1-3, между колоннами 1 и 10 опорной конструкции имеется соединительная балка 3.
Если опорная конструкция детектора содержит несколько узлов колонн, то эта опорная конструкция может содержать дополнительно поперечные балки между каждой парой подъемных платформ, причем детектор (предпочтительно плоская матрица датчиков) жестко прикреплен к поперечной балке и соответственно через эту поперечную балку жестко соединен с подъемной платформой. Как показано на фиг.1-3, между подъемными платформами 2 и 9 опорной конструкции детектора имеется поперечная балка 4, и детектор 17 соединен с этой поперечной балкой. Поскольку используется жесткая механическая конструкция, то для снижения требований к точности изготовления частей, в особенности к точности изготовления элементов, обеспечивающих жесткость конструкции, один конец поперечной балки 4, соединяющей подъемные платформы 2, 9 детектора, закреплен жестко в шарнире, а другой конец соединяется эластично, так чтобы поперечная балка 4 в штатном режиме работы могла синхронно перемещаться при выполнении операции сканирования.
Предлагаемая в настоящем изобретении установка содержит дополнительно подсистему привода и управления сканирующей системой, которая осуществляет привод и обеспечивает синхронное перемещение источника излучения и детектора по вертикали, так чтобы источник излучения и детектор могли синхронно перемещаться вверх или вниз или устанавливаться в любое заданное положение по вертикали. Подсистема привода и управления сканированием содержит двигатель 5 сервопривода для обеспечения действия ходового винта 12 в колоннах и устройство синхронного сервоуправления (не показано) для управления синхронной работой электродвигателя 5 сервопривода. Если предлагаемая в настоящем изобретении установка имеет трехколонную конструкцию, то устройство сервоуправления должно обеспечивать управление синхронным движением по трем осям. Предлагаемая в настоящем изобретении установка может содержать дополнительно главный компьютер управления. Элементы управления подсистемы привода и управления поворотного стола и подсистемы привода и управления сканированием могут быть выполнены в некоторых вариантах в форме единой системы управления, которая может быть реализована, например, с использованием главного компьютера управления и специального программного обеспечения этого компьютера. Главный компьютер управления может обеспечивать интерфейс взаимодействия "человек-машина" для управления работой установки в соответствии с командами оператора, а также для построения изображений на основе полученных данных и для их визуализации. Например, оператор может, используя интерфейс взаимодействия "человек-машина", ввести некоторые параметры, такие как угол непрерывного вращения или необходимое угловое положение поворотного стола, протяженность непрерывного вращения или необходимое положение по вертикали источника излучения или детектора, в подсистему привода и управления поворотным столом и в подсистему привода и управления сканированием соответственно. Таким образом, оператор может управлять установкой для сканирования досматриваемого объекта в различных режимах. Кроме того, главный компьютер управления может выполнять построение изображений на основе результатов измерений, полученных сканирующей системой, в соответствии с заданным алгоритмом обработки данных.
Как указывалось выше, предлагаемая в настоящем изобретении установка может обеспечивать досмотр объекта в различных рабочих режимах. Могут обеспечиваться, например, следующие режимы:
(1) режим получения двухмерных изображений в соответствии с результатами измерений излучения, прошедшего сквозь досматриваемый объект, при котором поворотный стол обеспечивает установку объекта по меньшей мере в одно заданное угловое положение; причем когда объект находится в каждом из заданных угловых положений, то с помощью источника излучения и детектора выполняется синхронное сканирование при их однократном проходе по вертикали для измерения излучения, прошедшего сквозь объект, во всех заданных угловых положениях; при этом установка обеспечивает формирование двухмерных изображений для каждого из заданных угловых положений в соответствии с результатами измерений излучения, прошедшего сквозь досматриваемый объект в каждом из заданных угловых положений;
(2) режим получения трехмерных изображений при сканировании под разными углами, при котором поворотный стол обеспечивает установку досматриваемого объекта в несколько заданных угловых положений; причем когда объект находится в каждом из заданных угловых положений, то с помощью источника излучения и детектора выполняется синхронное сканирование при однократном проходе по вертикали для измерения излучения, прошедшего сквозь объект, во всех заданных угловых положениях; при этом в установке осуществляется реконструкция трехмерного изображения досматриваемого объекта в соответствии с результатами измерений излучения, прошедшего сквозь объект, во всех заданных угловых положениях объекта; алгоритм, используемый для получения трехмерных изображений при сканировании под разными углами, описан, например, в китайской патентной заявке №200610076574.2, находящейся в совместной собственности, содержание которой полностью вводится ссылкой в настоящую заявку;
(3) режим двухмерной компьютерной томографии, при котором источник излучения или детектор устанавливается по меньшей мере в одно заданное положение по вертикали; причем когда источник излучения и детектор установлены в каждом из заданных положений по вертикали, то поворотный стол приводит досматриваемый объект в непрерывное вращение для получения результатов просвечивания при заданных положениях по вертикали; при этом в установке осуществляется реконструкция изображения двухмерного поперечного сечения досматриваемого объекта в заданных положениях по вертикали в соответствии с полученными данными просвечивания в этих заданных положениях;
(4) режим спирального сканирования для получения КТ-изображений, при котором источник излучения и детектор перемещаются по вертикали из первого заданного положения по вертикали во второе заданное положение по вертикали, причем поворотный стол приводит досматриваемый объект в непрерывное вращение, так чтобы осуществлялось спиральное КТ-сканирование для получения результатов сканирования досматриваемого объекта между первым положением по вертикали и вторым заданным положением по вертикали; при этом в установке осуществляется реконструкция трехмерного томографического изображения (объемная картина) объекта между первым заданным положением по вертикали и вторым заданным положением по вертикали в соответствии с полученными результатами спирального сканирования.
Вышеприведенные режимы указаны только в качестве примеров. Как указывалось, поворотный стол может непрерывно вращаться или поворачиваться в любое заданное угловое положение, в то время как сканирующая система (включая источник излучения и детектор) может двигаться непрерывно или перемещаться в любое заданное положение по вертикали. Специалист в данной области техники может представить различные возможные режимы работы предлагаемой в настоящем изобретении установки путем анализа различных комбинаций режимов движения поворотного стола и сканирующей системы установки. Оператор может выбрать один или несколько различных рабочих режимов для досмотра объекта.
С помощью предлагаемой в настоящем изобретении установки можно выполнять быструю проверку грузов больших и средних размеров, таких как, например, авиационные контейнеры стандартных размеров, и получать изображения при пропускании излучения, такие как, например, двумерные изображения в режиме просвечивания, двумерные КТ-срезы и трехмерные изображения (с использованием сканирования под разными углами или режима спирального сканирования), которые дают представление о форме и распределении плотности груза, находящегося в авиационном контейнере. Оператор досмотровой установки может быстро сделать заключение о соответствии декларации содержимого контейнера и о наличии (отсутствии) контрабанды, выполнив быструю и эффективную проверку груза путем анализа характерной информации о досматриваемом объекте, предоставляемой установкой.
Типичная процедура проверки с помощью предлагаемой в настоящем изобретении установки может быть описана следующим образом:
Стадия (1): перемещение объекта на поворотный стол 11.
На стадиях (2)-(4) предлагаемая в настоящем изобретении установка используется для проверки досматриваемого объекта в режиме получения двухмерных изображений в соответствии с результатами измерений излучения, прошедшего сквозь объект.
Стадия (2): поворотный стол 11 неподвижен, а источник 6 излучения и детектор 17 выполняют синхронное сканирование в процессе однократного прохода по вертикали для измерения излучения, прошедшего сквозь объект, для текущего углового положения.
Стадия (3): осуществляется поворот поворотного стола 11 на 90 градусов и снова выполняется стадия (2) для получения новых измерений излучения, прошедшего сквозь объект.
Стадия (4): на монитор компьютера выводятся изображения, полученные в соответствии с результатами измерений, выполненных на стадиях (2) и (3), которые анализируются оператором, при этом, если в результате анализа обнаружена подозрительная зона, то осуществляется переход на стадию (8).
На стадиях (5)-(7) предлагаемая в настоящем изобретении установка используется для проверки досматриваемого объекта в режиме получения трехмерных изображений в соответствии с результатами измерений излучения, прошедшего сквозь объект под разными углами.
Стадия (5): поворотный стол 11 поворачивается на сравнительно небольшой угол, например, на угол в диапазоне 10-30 градусов, и стадия (2) выполняется еще раз.
Стадия (6): десятикратное выполнение стадии (5).
Стадия (7): осуществление реконструкции трехмерного изображения досматриваемого объекта путем обработки 12 наборов измерений, полученных на предыдущих стадиях; переход на стадию (8) в том случае, если обнаружена подозрительная зона; в противном случае объект считается прошедшим проверку.
На стадии (8) с помощью предлагаемой в настоящем изобретении установки осуществляется сканирование обнаруженной подозрительной зоны в режиме сканирования для получения двухмерных КТ-изображений или в режиме спирального сканирования для получения КТ-изображений. В частности, источник 6 излучения и детектор 17 устанавливаются на уровне подозрительной зоны, и поворотный стол 11 приводит досматриваемый объект в непрерывное вращение. В режиме получения двухмерных КТ-изображений источник 6 излучения и детектор 17 остаются неподвижными, и измерения излучения, прошедшего сквозь объект, осуществляются при текущем положении, и в результате обработки полученных измерений получают изображение двухмерного сечения. В режиме получения КТ-изображений при спиральном сканировании источник 6 излучения и детектор 17 перемещаются по вертикали в пределах видимости подозрительной зоны для измерения излучения, прошедшего сквозь эту зону, и в результате обработки полученных измерений получают трехмерное КТ-изображение (объемная картина).
Стадия (9): оператор принимает окончательное решение на основании томографического изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ОБНАРУЖЕНИЯ КОНТРАБАНДЫ В АВИАЦИОННЫХ ГРУЗОВЫХ КОНТЕЙНЕРАХ | 2008 |
|
RU2390761C1 |
| ТОМОГРАФИЧЕСКАЯ СКАНИРУЮЩАЯ ДОСМОТРОВАЯ УСТАНОВКА И СПОСОБ СКАНИРОВАНИЯ | 2008 |
|
RU2383882C2 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ ПРОСВЕЧИВАНИЯ ИЗЛУЧЕНИЕМ ПОД РАЗНЫМИ УГЛАМИ | 2007 |
|
RU2400735C2 |
| СПОСОБ И УСТАНОВКА (ВАРИАНТЫ) ДЛЯ ДОСМОТРА ОБЪЕКТОВ, СОДЕРЖАЩИХ ЖИДКОСТИ | 2008 |
|
RU2445609C2 |
| УСТАНОВКА ДЛЯ ДОСМОТРА ГРУЗОВ | 2007 |
|
RU2386954C1 |
| СПОСОБ И УСТАНОВКА РАДИАЦИОННОГО КОНТРОЛЯ ЖИДКИХ ОБЪЕКТОВ | 2006 |
|
RU2372610C1 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ СПИРАЛЬНОГО СКАНИРОВАНИЯ | 2007 |
|
RU2396551C1 |
| СИСТЕМА ПРОВЕРКИ ТРЕЙЛЕРОВ | 2008 |
|
RU2402075C2 |
| КОМПЬЮТЕРНЫЙ ТОМОГРАФ | 2013 |
|
RU2553184C1 |
| СПОСОБ ДОСМОТРА И ДОСМОТРОВЫЙ КОМПЛЕКС | 2012 |
|
RU2512679C1 |
Использование: для обнаружения контрабанды в авиационных грузовых контейнерах. Сущность заключается в том, что осуществляют обнаружение контрабанды в авиационных грузовых контейнерах с использованием досмотровой установки для проверки досматриваемого объекта, которая содержит: сканирующую систему и поворотный стол, который установлен в месте проведения досмотра объекта и предназначен для удерживания досматриваемого объекта и приведения его во вращение, причем поворотный стол устроен таким образом, чтобы он мог непрерывно вращаться вокруг своей оси вращения или поворачиваться в любое заданное угловое положение, и сканирующая система, размещенная вокруг поворотного стола и предназначенная для сканирования досматриваемого объекта с целью получения данных, необходимых для построения изображений, содержит источник излучения и детектор, которые устроены таким образом, чтобы они могли синхронно перемещаться по вертикали, причем они могут двигаться непрерывно или перемещаться в любое заданное положение по вертикали, причем досмотровая установка для проверки досматриваемого объекта функционирует в нескольких рабочих режимах получения изображения. Технический результат: повышение скорости проверки досматриваемых грузов, обеспечение возможности просмотра авиационных контейнеров, имеющих сравнительно большие размеры, а также обеспечение возможности использования различных режимов сканирования для расширения режимов получения изображения одного и того же груза. 2 н. и 20 з.п. ф-лы, 3 ил.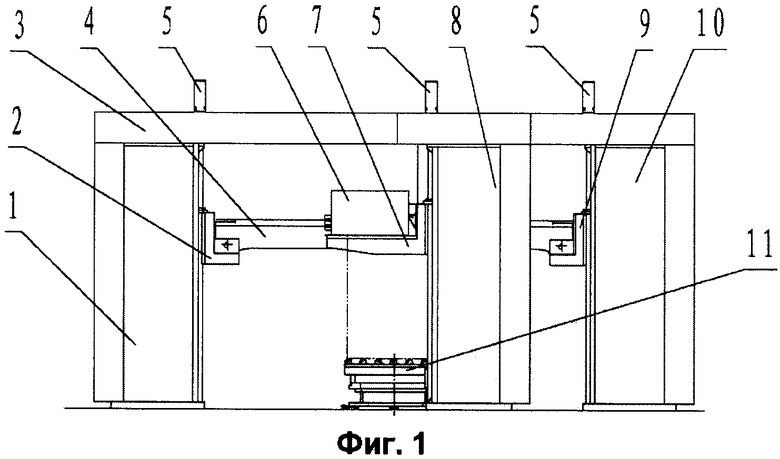
1. Установка для обнаружения контрабанды в авиационных грузовых контейнерах, содержащая:
поворотный стол, установленный в месте проведения досмотра объекта и предназначенный для удерживания досматриваемого объекта и приведения его во вращение;
систему транспортировки досматриваемого объекта для его перемещения в горизонтальном направлении к поворотному столу и для перемещения объекта от поворотного стола после завершения операции досмотра;
сканирующую систему, которая размещена вокруг поворотного стола и предназначена для сканирования досматриваемого объекта с целью получения информации для построения изображений, причем сканирующая система содержит источник излучения и детектор, которые могут синхронно перемещаться по вертикали;
подсистему привода и управления поворотным столом, которая осуществляет привод поворотного стола и управляет его вращением, так что может обеспечиваться непрерывное вращение поворотного стола вокруг его оси вращения или его установка в любое заданное угловое положение;
подсистему привода и управления сканирующей системой, которая управляет и обеспечивает синхронное перемещение источника излучения и детектора по вертикали, так чтобы источник излучения и детектор могли синхронно перемещаться вверх или вниз или устанавливаться в любое заданное положение по вертикали, причем установка выполнена с возможностью проверки одного досматриваемого объекта по меньшей мере в одном из нескольких следующих рабочих режимов:
режим получения двухмерных изображений в соответствии с результатами измерения излучения, прошедшего сквозь досматриваемый объект, причем объект устанавливается по меньшей мере в одно заданное угловое положение; причем когда объект находится в каждом из заданных угловых положений, то с помощью источника излучения и детектора выполняется синхронное сканирование при их однократном проходе по вертикали для измерения излучения, прошедшего сквозь объект, в каждом из заданных угловых положений; при этом установка обеспечивает формирование двухмерных изображений для каждого из заданных угловых положений в соответствии с результатами измерений излучения, прошедшего сквозь досматриваемый объект для каждого из заданных угловых положений;
режим получения трехмерных изображений, при котором поворотный стол обеспечивает установку досматриваемого объекта в несколько заданных угловых положений; причем когда объект находится в каждом из заданных угловых положений, то с помощью источника излучения и детектора выполняется синхронное сканирование при их однократном проходе по вертикали для измерения излучения, прошедшего сквозь объект, в каждом из заданных угловых положений; при этом в установке осуществляется реконструкция трехмерного изображения досматриваемого объекта в соответствии с результатами измерений излучения, прошедшего сквозь объект, в каждом из заданных угловых положений объекта;
режим двухмерной компьютерной томографии, при котором источник излучения и детектор устанавливаются по меньшей мере в одном заданном положении по вертикали; причем когда источник излучения и детектор установлены в каждом из заданных положений по вертикали, то поворотный стол приводит досматриваемый объект в непрерывное вращение для измерения излучения, прошедшего сквозь объект, в каждом из заданных положений по вертикали; при этом в установке осуществляется реконструкция изображения двухмерного поперечного сечения досматриваемого объекта в каждом из заданных положений по вертикали в соответствии с полученными результатами измерений в каждом из этих заданных положений;
режим спирального сканирования для получения КТ-изображений, при котором источник излучения и детектор перемещаются по вертикали из первого заданного положения по вертикали во второе заданное положение по вертикали, причем поворотный стол приводит досматриваемый объект в непрерывное вращение, так чтобы осуществлялось спиральное КТ-сканирование для получения результатов сканирования досматриваемого объекта между первым положением по вертикали и вторым заданным положением по вертикали; при этом в установке осуществляется реконструкция трехмерного томографического изображения (объемная картина) объекта между первым положением по вертикали и вторым заданным положением по вертикали в соответствии с полученными результатами спирального сканирования.
2. Установка по п.1, предназначенная для выполнения проверки одного досматриваемого объекта по меньшей мере в двух из нескольких рабочих режимов.
3. Установка по п.1, в которой в качестве поворотного стола используется составной вращающийся стол, обеспечивающий перемещение досматриваемого объекта.
4. Установка по п.1, в которой сканирующая система содержит дополнительно опорную конструкцию источника излучения, на которой устанавливается источник радиации, и опорную конструкцию детектора, на которой устанавливается детектор.
5. Установка по п.4, в которой опорная конструкция источника излучения или опорная конструкция детектора содержит по меньшей мере один узел колонн, или опорная конструкция источника излучения и опорная конструкция детектора содержат по меньшей мере по одному узлу колонн.
6. Установка по п.5, в которой каждый узел колонн содержит:
колонну, установленную вертикально;
подъемный механизм, расположенный вдоль колонны и поддерживаемый ею, причем источник излучения или детектор установлен на таком подъемном механизме.
7. Установка по п.6, в которой подъемный механизм содержит:
ходовой винт, проходящий вдоль колонны;
подъемную платформу, установленную на ходовом винте и соединенную с ним с помощью резьбового соединения, причем источник излучения или детектор жестко соединен с подъемной платформой;
и при вращении ходового винта, подъемная платформа может подниматься и опускаться вдоль ходового винта за счет взаимодействия с его резьбой.
8. Установка по п.7, в которой подъемная платформа имеет резьбовое соединение с ходовым винтом с использованием гайки, жестко закрепленной на подъемной платформе и навернутой на ходовой винт; или подъемная платформа содержит сквозной проход с резьбой, в который вворачивается ходовой винт.
9. Установка по п.7, в которой подъемный механизм содержит дополнительно по меньшей мере один направляющий рельс, проходящий вдоль колонны, так что подъемная платформа может скользить по направляющему рельсу, который направляет ее в процессе подъема и опускания.
10. Установка по п.9, в которой подъемная платформа соединена с направляющим рельсом с возможностью скольжения по нему с использованием ползуна, который может скользить по направляющему рельсу и жестко соединен с подъемной платформой; или подъемная платформа имеет сквозной проход, сквозь который проходит направляющий рельс.
11. Установка по п.5, в которой опорная конструкция источника излучения содержит один узел колонн.
12. Установка по п.5 или 11, в которой опорная конструкция детектора содержит несколько узлов колонн.
13. Установка по п.12, в которой опорная конструкция детектора содержит дополнительно соединительную балку между каждой парой соседних колонн узлов колонн.
14. Установка по п.12, в которой опорная конструкция детектора содержит дополнительно поперечную балку, соединенную с каждой парой соседних подъемных платформ узлов колонн, причем детектор жестко прикреплен к поперечной балке и, соответственно, через эту поперечную балку жестко прикреплен к подъемной платформе.
15. Установка по п.14, в которой один конец поперечной балки закреплен жестко в шарнире одной из соседних подъемных платформ, а другой ее конец соединяется эластично с другой соседней подъемной платформой.
16. Установка по п.12, в которой опорная конструкция детектора содержит два узла колонн.
17. Установка по п.7, в которой подсистема привода и управления сканирующей системой содержит:
двигатель сервопривода для обеспечения работы ходового винта в каждом узле колонн;
устройство синхронного сервоуправления для обеспечения синхронной работы электродвигателей сервопривода.
18. Установка по п.1, которая содержит дополнительно главный управляющий компьютер, обеспечивающий интерфейс взаимодействия "человек-машина" для управления работой установки в соответствии с командами оператора, а также формирование изображений в соответствии с полученными результатами измерений и их визуализацию.
19. Установка по п.1, в которой детектор представляет собой матрицу датчиков, имеющую плоскую форму.
20. Способ обнаружения контрабанды в авиационных грузовых контейнерах с использованием досмотровой установки для проверки досматриваемого объекта, которая содержит: сканирующую систему и поворотный стол, который установлен в месте проведения досмотра объекта и предназначен для удерживания досматриваемого объекта и приведения его во вращение, причем поворотный стол устроен таким образом, чтобы он мог непрерывно вращаться вокруг своей оси вращения или поворачиваться в любое заданное угловое положение, и сканирующая система, размещенная вокруг поворотного стола и предназначенная для сканирования досматриваемого объекта с целью получения данных, необходимых для построения изображений, содержит источник излучения и детектор, которые устроены таким образом, чтобы они могли синхронно перемещаться по вертикали, причем они могут двигаться непрерывно или перемещаться в любое заданное положение по вертикали, причем способ содержит стадию использования одной досмотровой установки для проверки досматриваемого объекта в нескольких рабочих режимах, которые содержат по меньшей мере один из следующих режимов:
режим получения двухмерных изображений в соответствии с результатами измерений излучения, прошедшего сквозь досматриваемый объект, при котором поворотный стол обеспечивает установку объекта по меньшей мере в одно заданное угловое положение; причем когда объект находится в каждом из заданных угловых положений, то с помощью источника излучения и детектора выполняется синхронное сканирование при их однократном проходе по вертикали для измерения излучения, прошедшего сквозь объект, во всех заданных угловых положениях; при этом установка обеспечивает формирование двухмерных изображений для каждого из заданных угловых положений в соответствии с результатами измерений излучения, прошедшего сквозь досматриваемый объект в каждом из заданных угловых положений;
режим получения трехмерных изображений при сканировании под разными углами, при котором поворотный стол обеспечивает установку досматриваемого объекта в несколько заданных угловых положений; причем когда объект находится в каждом из заданных угловых положений, то с помощью источника излучения и детектора выполняется синхронное сканирование при однократном проходе по вертикали для измерения излучения, прошедшего сквозь объект, во всех заданных угловых положениях; при этом в установке осуществляется реконструкция трехмерного изображения досматриваемого объекта в соответствии с результатами измерений излучения, прошедшего сквозь объект, в заданных угловых положениях объекта;
режим двухмерной компьютерной томографии, при котором источник излучения или детектор устанавливается по меньшей мере в одно заданное положение по вертикали; причем когда источник излучения и детектор установлены в каждом из заданных положений по вертикали, то поворотный стол приводит досматриваемый объект в непрерывное вращение для получения результатов просвечивания при заданных положениях по вертикали; при этом в установке осуществляется реконструкция изображения двухмерного поперечного сечения досматриваемого объекта в заданных положениях по вертикали в соответствии с полученными данными просвечивания в этих заданных положениях;
режим спирального сканирования для получения КТ-изображений, при котором источник излучения и детектор перемещаются по вертикали из первого заданного положения по вертикали во второе заданное положение по вертикали, причем поворотный стол приводит досматриваемый объект в непрерывное вращение, так чтобы осуществлялось спиральное КТ-сканирование для получения результатов сканирования досматриваемого объекта между первым заданным положением по вертикали и вторым заданным положением по вертикали; при этом в установке осуществляется реконструкция трехмерного томографического изображения (объемная картина) объекта между первым заданным положением по вертикали и вторым заданным положением по вертикали в соответствии с полученными результатами спирального сканирования.
21. Способ по п.20, в котором рабочие режимы содержат по меньшей мере два из вышеперечисленных рабочих режимов.
22. Способ по п.20 или 21, который включает следующие дополнительные стадии:
проверка досматриваемого объекта в режиме просвечивания для получения двухмерных изображений и переход на стадию (3) в случае обнаружения какой-либо подозрительной зоны;
проверка досматриваемого объекта в режиме получения трехмерных изображений при просвечивании объекта под разными углами и переход на стадию (3) в случае обнаружения какой-либо подозрительной зоны;
проверка подозрительной зоны в режиме сканирования для получения двухмерных КТ-изображений или в режиме спирального сканирования для получения КТ-изображений.
| Устройство для ориентации ультразвукового преобразователя | 1983 |
|
SU1244580A1 |
| Способ определения полюсной плотности текстурованных материалов | 1987 |
|
SU1511652A1 |
| СПОСОБ РЕНТГЕНОСТРУКТУРНОГО АНАЛИЗА | 1998 |
|
RU2142623C1 |
| JP 4064044 A, 28.02.1992 | |||
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ДИАГНОСТИ1^ИОБРЫВОВ | 0 |
|
SU218535A1 |

