ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к технологиям радиационного контроля, в частности к способам досмотра грузов с использованием спирального сканирования.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Досмотр грузов имеет большое значение в таких областях как антитеррористическая деятельность и борьба с провозом наркотиков и контрабандных товаров. После нападений террористов 11 сентября в Соединенных Штатах, в обществе все более расширяется понимание важности досмотра грузов и вещей пассажиров в гражданской авиации. По мере расширения борьбы с провозом наркотиков и контрабандных товаров требования к досмотру авиационных контейнеров и багажа, перевозимого по железным дорогам, становятся все более высокими.
В настоящее время рентгеновские досмотровые установки используются для проведения досмотра в аэропортах, на железнодорожном и автомобильном транспорте. Все большее значение приобретает получение в досмотровых установках перспективных изображений. Самым большим недостатком систем получения перспективных изображений досматриваемых объектов является неспособность решить проблему перекрытия изображений объектов в направлении прохождения лучей и невозможность получения трехмерных изображений.
Например, если пластиковая взрывчатка изготовлена в форме тонких листов и заложена в громоздком объекте, и тонкие листы параллельны ленте конвейера системы получения пространственных изображений, то есть расположены вертикально по отношению к направлению прохождения рентгеновских лучей, то очень трудно определить присутствие тонких листов на полученных изображениях.
По мере развития технических средств технология компьютерной томографии (КТ-технология) постепенно становится все более зрелой и уже применяется в системах досмотра багажа. Для выполнения досмотра с использованием КТ-систем требуется сканирование с вращением и реконструкция трехмерных изображений на основе проекционных данных, полученных при просвечивании объекта излучением. В частности, в КТ-системе со спиральным сканированием осуществляется вращение и поступательное перемещение источника радиации относительно досматриваемого объекта, так что источник радиации перемещается по спиральной траектории относительно объекта.
В известных технических решениях КТ-систем источник радиации перемещается по спирали относительно досматриваемого объекта с малым шагом спирали для получения высокоточных или полных проекционных данных при просвечивании излучением всех срезов досматриваемого объекта. В результате скорость досмотра для таких КТ-систем обычно очень низка, так что на выполнение обычных досмотровых процедур тратится очень много времени. Однако в настоящее время от досмотровых систем на авиационном, железнодорожном и автомобильном транспорте, как правило, требуется работа в режиме реального времени, и объекты должны проверяться достаточно быстро. Совершенно очевидно, что скорость сканирования известных КТ-систем со спиральным сканированием не может удовлетворять требованиям к скорости досмотра. Конечно, увеличение шага спирали сканирования спиральной КТ-системы повысит скорость сканирования и, соответственно, повысит скорость досмотра грузов. Однако увеличение шага спирали будет приводить к снижению точности, и поэтому точность реконструкции трехмерного изображения и, соответственно, точность досмотра грузов будут ухудшаться.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Ввиду недостатков известных технических решений целью настоящего изобретения является создание способа досмотра грузов с использованием спирального сканирования, который позволяет экономить время и выполнять быстрый и точный досмотр грузов.
Для достижения указанной цели в настоящем изобретении предлагается следующее техническое решение.
Предлагается способ досмотра грузов, в котором используется спиральное сканирование для проверки досматриваемого объекта с помощью установки досмотра грузов, содержащей источник радиации для получения пучка излучения и блок сбора информации для получения проекционных данных досматриваемого объекта.
Предлагаемый в изобретении способ содержит следующие стадии:
стадия А: спиральное сканирование досматриваемого объекта с первой точностью, с использованием пучка излучения, и получение в блоке сбора информации проекционных данных при просвечивании излучением досматриваемого объекта;
стадия В: принятие решения о наличии или отсутствии подозрительной зоны в досматриваемом объекте на основе проекционных данных, полученных при просвечивании объекта, и выполнение стадии С в случае обнаружения подозрительной зоны, в противном случае досмотр заканчивается;
стадия С: сканирование по меньшей мере одного среза указанной подозрительной зоны со второй точностью, с использованием пучка излучения, и получение проекционных данных при просвечивании излучением по меньшей мере одного среза в блоке сбора информации, причем вторая точность выше, чем первая точность на стадии А;
стадия D: реконструкция томографического изображения указанного по меньшей мере одного среза на основе проекционных данных, полученных на стадии С, и использование реконструированного томографического изображения для принятия решения о наличии или отсутствии каких-либо опасных предметов в подозрительной зоне.
Предпочтительно на стадии А траектория сканирования пучком излучения досматриваемого объекта является охватывающей его спиралью, шаг которой находится в диапазоне 5-10.
Предпочтительно установка досмотра грузов содержит дополнительно несущее устройство для удерживания досматриваемого объекта, причем на стадии А несущее устройство вращается вместе с находящимся на нем досматриваемым объектом в плоскости вращения, и, кроме того, пучок излучения и блок сбора данных синхронно перемещаются поступательно перпендикулярно плоскости вращения досматриваемого объекта.
Предпочтительно стадия В содержит: обработку проекционных данных при просвечивании излучением досматриваемого объекта с использованием алгоритма досмотра опасных объектов и поиска подозрительной зоны на основе полученных проекционных данных. В альтернативном варианте стадия В предпочтительно содержит использование проекционных данных для реконструкции трехмерного изображения досматриваемого объекта и использование трехмерного изображения для поиска подозрительной зоны. Еще в одном альтернативном варианте стадия В предпочтительно содержит обработку полученных проекционных данных с использованием алгоритма досмотра опасных объектов и поиска подозрительной зоны, и затем использование полученных проекционных данных для такой подозрительной зоны для реконструкции трехмерного изображения, в результате чего на основе анализа этого трехмерного изображения подтверждается или отклоняется предположение о подозрительности выявленной зоны.
Предпочтительно указанное трехмерное изображение является изображением распределения по меньшей мере одной физической характеристики.
Предпочтительно изображение распределения физической характеристики реконструируется с использованием алгоритма КТ-реконструкции.
Предпочтительно в качестве источника радиации используется источник с одним или с двумя уровнями энергии излучения. Предпочтительно при использовании источника с одним уровнем излучения указанная по меньшей мере одна физическая характеристика является коэффициентом ослабления досматриваемого объекта для указанного уровня энергии. Предпочтительно, если источник радиации является источником с двумя уровнями энергии излучения, который испускает пучок излучения с первым уровнем энергии и пучок излучения со вторым уровнем энергии, отличающимся от первого уровня, то по меньшей мере одна физическая характеристика включает одну или несколько характеристик, выбранных из атомного числа, плотности электронов и коэффициента ослабления досматриваемого объекта, для первого уровня энергии, и коэффициент ослабления досматриваемого объекта для второго уровня энергии.
Предпочтительно на стадии D указанное томографическое изображение является изображением распределения по меньшей мере одной физической характеристики среза. Предпочтительно изображение распределения физической характеристики среза реконструируется с использованием алгоритма КТ-реконструкции.
Предпочтительно на стадии С осуществляется сканирование каждого отдельного среза пучком излучения с использованием замкнутой спиральной траектории сканирования.
Предпочтительно на стадии С указанный по меньшей мере один срез представляет собой несколько срезов в подозрительной зоне. Предпочтительно на стадии С сканирование нескольких срезов пучком излучения осуществляется по спиральной траектории. Предпочтительно стадия D содержит дополнительно объединение томографических изображений нескольких срезов в одно трехмерное изображение и принятие решения о наличии или отсутствии каких-либо опасных предметов в подозрительной зоне на основе такого трехмерного изображения.
Предпочтительно способ содержит дополнительно отображение томографического изображения и/или трехмерного изображения.
Основная идея настоящего изобретения заключается в следующем. В соответствии с настоящим изобретением объект досматривается в два этапа. Первый этап можно назвать "приблизительным досмотром", который характеризуется пониженной точностью и предназначен для поиска каких-либо потенциально подозрительных зон досматриваемого объекта, могущих содержать опасные предметы. Второй этап можно назвать "точным досмотром", который характеризуется повышенной точностью и предназначен для подтверждения или отклонения предположения о наличии опасных предметов в подозрительной зоне.
При "приблизительном досмотре" осуществляется спиральное сканирование досматриваемого объекта с первой точностью. Первая точность меньше точности традиционного спирального КТ-сканирования. Поэтому приблизительный досмотр позволяет получить информацию сканирования с невысокой точностью или неполную информацию сканирования по сравнению с обычным спиральным КТ-сканированием. Однако поскольку единственным назначением приблизительного досмотра является поиск подозрительной зоны, которая потенциально может содержать опасный предмет, то такая неполная информация или информация сканирования с невысокой точностью является достаточной. Далее, поскольку приблизительный досмотр проводится с невысокой точностью, то скорость сканирования может быть достаточно высокой, в результате чего экономится время досмотра по сравнению с обычным спиральным КТ-сканированием. Точность сканирования может быть определена шагом сканирования. Например, при обычном спиральном КТ-сканировании величина шага, как правило, находится в диапазоне 0,5-1,0, в то время как при приблизительном досмотре, предусматриваемом настоящим изобретением, величина шага сканирования может находиться в диапазоне 5-10 (здесь указывается относительный шаг), и, соответственно, скорость сканирования будет существенно выше.
При "точном досмотре" осуществляется спиральное сканирование досматриваемого объекта со второй точностью. Поскольку целью точного досмотра является подтверждение или отклонение предположения о наличии опасного предмета в подозрительной зоне, вторая точность выше первой точности, используемой при приблизительном досмотре. Например, вторая точность может быть примерно такой же, как точность, используемая при обычном или спиральном КТ-сканировании, для получения высокоточных проекционных данных или по существу полных проекционных данных. Например, при точном досмотре может использоваться сканирование по спиральной траектории или спиральное сканирование с малым шагом спирали (например, величина шага в вышеуказанном диапазоне 0,5-1,0).
К преимуществам настоящего изобретения можно отнести следующие его достоинства.
1. По сравнению с обычно используемым сканированием всего досматриваемого объекта и реконструкцией его изображения предлагаемый в изобретении способ существенно сокращает время сканирования досматриваемого объекта и, соответственно, экономит время досмотра грузов и обеспечивает быстрый и точный досмотр, поскольку сначала осуществляется быстрое спиральное сканирование досматриваемого объекта при малой точности и затем высокоточное КТ-сканирование выполняется только для выявленной подозрительной зоны.
2. По сравнению с обычным получением пространственных изображений досматриваемого объекта в настоящем изобретении осуществляется КТ-сканирование подозрительной зоны и реконструкция ее томографического изображения, так что подозрительные предметы, такие как пластиковая взрывчатка, спрятанная в багаже, могут быть обнаружены, и проблема перекрытия объектов на пространственных изображениях может быть эффективно разрешена в соответствии со способом, предлагаемым в настоящем изобретении.
3. Для осуществления настоящего изобретения не требуются какие-либо изменения аппаратных средств известных установок досмотра грузов, так что затраты будут невысоки, и настоящее изобретение может быть легко реализовано и применено в широких масштабах.
КРАТКОЕ ОПИСАНИЕ ПРИЛАГАЕМЫХ ЧЕРТЕЖЕЙ
Фигура 1 - общая схема варианта досмотровой системы в соответствии с настоящим изобретением;
фигура 2 - блок-схема алгоритма осуществления способа досмотра грузов в соответствии с настоящим изобретением;
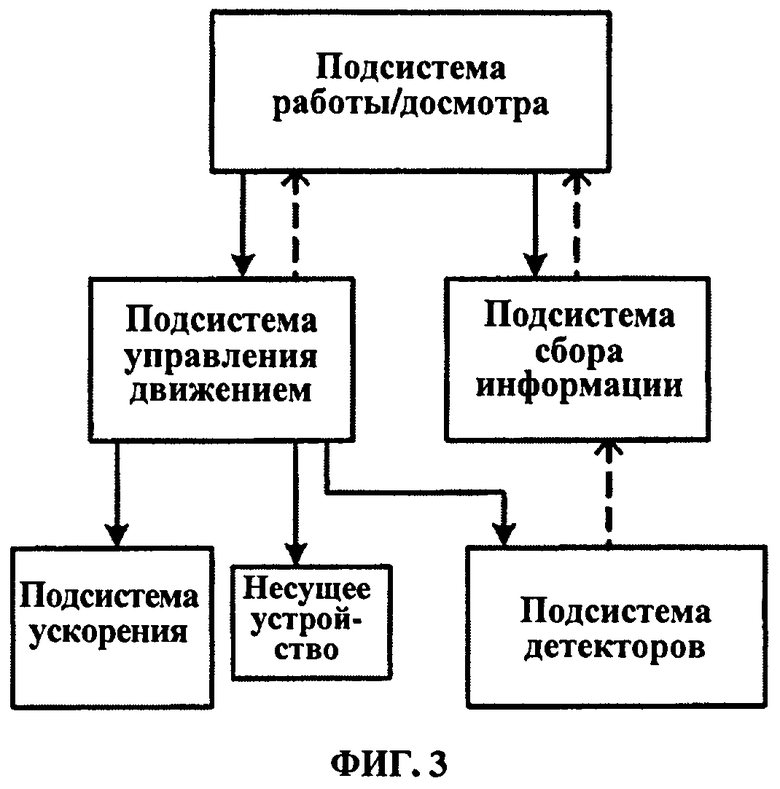
фигура 3 - схема, иллюстрирующая направление передачи управляющих сигналов и информации системы досмотра грузов в соответствии с настоящим изобретением.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение будет рассмотрено подробно на примерах его осуществления со ссылками на прилагаемые чертежи, которые позволяют изложить более понятно суть технического решения в соответствии с изобретением.
На фигуре 1 представлена общая схема установки досмотра грузов, в которой осуществляется предлагаемый в изобретении способ и которая содержит источник 1 радиации, несущее устройство 4, блок 3 сбора информации и главный компьютер управления и обработки информации (не показан).
В качестве источника 1 радиации может использоваться источник с одним или двумя уровнями энергии излучения, например рентгеновская установка или изотопный источник. Если используется источник радиации с одним уровнем энергии, то он вырабатывает излучение с уровнем энергии порядка 6 МэВ. Осуществляя сканирование с использованием источника радиации с одним уровнем энергии излучения, можно получить коэффициент ослабления объекта. В случае источника радиации с двумя уровнями энергии излучения он может использоваться для получения пучков излучения с двумя уровнями энергии, причем режимы излучения с этими уровнями энергии чередуются с высокой частотой. В общем случае, значение первого уровня энергии излучения равно 3 МэВ, и второго уровня энергии 6 МэВ. При использовании источника радиации с двумя уровнями энергии, осуществляя сканирование объекта, можно получить такие его характеристики, как атомное число, плотность электронов, а также коэффициенты ослабления для первого и второго уровней энергии излучения. Источник с двумя уровнями энергии является предпочтительным, и, используя вышеуказанные физические характеристики, которые могут быть получены в этом случае, можно повысить скорость работы установок досмотра грузов, снизить уровень ложных тревог таких установок, то есть можно существенно улучшить показатели их быстродействия и надежности.
Несущее устройство 4 может вращаться относительно вертикальной оси и используется для удерживания досматриваемого объекта 2. Досматриваемый объект 2 закрепляется на несущем устройстве 4 и при выполнении процедуры досмотра относительно несущего устройства не перемещается.
Блок 3 сбора информации в общем случае представляет собой матрицу детекторов, расположенную напротив источника 1 радиации. Центральный луч конического пучка, испускаемого источником 1 радиации, проходит через центр матрицы детекторов, и раскрыв конуса пучка излучения, перекрывает всю площадь матрицы детекторов.
Для осуществления досмотра с большой скоростью и с высокой точностью блок 3 сбора информации содержит дополнительно средства для точного измерения или калибровки следующих параметров системы: расстояние от источника излучения до центра несущего устройства, расстояние от источника излучения до центра детектора, скорость вращения несущего устройства, скорость перемещения по вертикали источника излучения и детектора, энергия пучка излучения, интервал выборки детектора, физические размеры детектора и аналогичные параметры. Физические размеры детекторов определяются физическими размерами одного датчика-детектора и физическими размерами матрицы детекторов. Средства измерения или калибровки указанных параметров системы в технике известны и здесь подробно не описываются.
Главный компьютер управления и обработки информации содержит блок управления сканированием и блок обработки данных. Он может представлять собой один компьютер или несколько компьютеров или рабочую станцию, в состав которой входит несколько компьютеров. Обычно используется ПК с высокой производительностью. Блок управления сканированием может управлять вращением с постоянной скоростью несущего устройства 4 и синхронным движением по вертикали источника 1 радиации и матрицы 3 детекторов.
Перед выполнением процедуры досмотра объект 2 сначала помещают на горизонтальное несущее устройство 4. Досматриваемый объект 2 может быть доставлен на несущее устройство 4 с помощью ленточного или роликового конвейера. Кроме того, для обеспечения неподвижности досматриваемого объекта 2 относительно несущего устройства 4 при выполнении процедуры досмотра, площадка несущего устройства 4, на которую устанавливается досматриваемый объект 2, имеет шероховатую поверхность, или используются дополнительные фиксирующие средства.
По окончании подготовительной работы установка досмотра грузов запускается для проведения досмотра объекта, установленного на несущем устройстве 4.
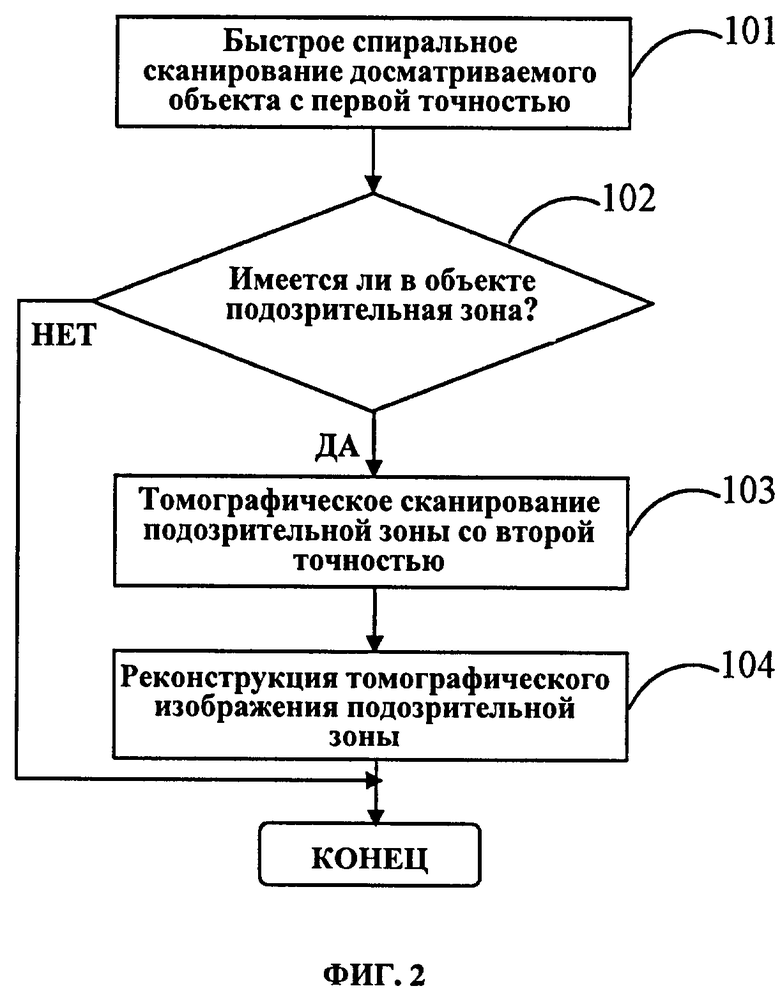
На фигуре 2 представлена блок-схема алгоритма осуществления способа досмотра грузов в соответствии с настоящим изобретением. Как показано на фигуре 2, на стадии 101 осуществляется быстрое спиральное сканирование досматриваемого объекта с первой точностью для получения проекционных данных при просвечивании объекта излучением, стадия 102 выполняется для принятия решения о наличии или отсутствии подозрительной зоны в досматриваемом объекте: если какая-то зона определяется как подозрительная, то выполняется стадия 103; если же нет, то процедура досмотра заканчивается; на стадии 103 выполняется томографическое сканирование подозрительной зоны со второй точностью, которая выше первой точности; и на стадии 104 осуществляется реконструкция томографического изображения подозрительной области.
На стадии 101 осуществляется быстрое спиральное сканирование досматриваемого объекта с первой точностью с использованием одного уровня энергии или двух уровней энергии, и в блок сбора информации передаются проекционные данные. При выполнении стадии 101 включается досмотровая система, при этом главный компьютер управления и обработки информации осуществляет управление несущим устройством для обеспечения вращения досматриваемого объекта с постоянной скоростью. Источник радиации и блок сбора информации синхронно перемещаются по вертикали, и в то же время пучок излучения, испускаемый источником радиации, проходит через досматриваемый объект, находящийся на несущем устройстве, и блок сбора информации получает проекционные данные при просвечивании излучением досматриваемого объекта. Траектория сканирования пучком излучения досматриваемого объекта представляет собой спираль, охватывающую этот объект. Первая точность, используемая на стадии 101, меньше точности, используемой при обычном спиральном КТ-сканировании. Например, в одном из вариантов осуществления изобретения величина шага спирали находится в диапазоне 5-10, что безусловно гораздо больше, чем диапазон 0,5-1,0, используемый при обычном спиральном КТ-сканировании. При выполнении спирального сканирования в главный компьютер управления и обработки информации непрерывно поступает информация о местонахождении сканируемой зоны и проекционные данные.
На стадии 102 на основе проекционных данных, полученных на стадии 101, принимается решение о наличии или отсутствии подозрительной зоны в досматриваемом объекте. Имеется три способа принятия решения о наличии или отсутствии подозрительной зоны.
1) Обработка проекционных данных с использованием известного алгоритма досмотра опасных объектов и поиска подозрительной зоны на основе полученных проекционных данных. Главный компьютер управления и обработки информации выполняет операции в соответствии с алгоритмом досмотра опасных объектов для определения потенциально подозрительной зоны опасных объектов на основе полученных проекционных данных. Если выявляется подозрительная зона, то ее местонахождение отмечается.
2) Главный компьютер управления и обработки информации использует указанные проекционные данные при просвечивании излучением досматриваемого объекта для реконструкции его трехмерного изображения и использует это изображение для поиска подозрительной зоны. Если выявляется подозрительная зона, то ее местонахождение отмечается. По сравнению с первым способом второй способ имеет большую надежность.
3) Может использоваться комбинация первого и второго способов. Прежде всего, полученные проекционные данные обрабатываются с использованием алгоритма досмотра опасных объектов и поиска подозрительной зоны, и, если такая зона выявлена, то на основе полученных проекционных данных для этой подозрительной зоны осуществляется реконструкция ее трехмерного изображения, в результате чего на основе анализа этого трехмерного изображения подтверждается или отклоняется предположение о подозрительности выявленной зоны. Последний способ является более предпочтительным в том случае, когда первый способ недостаточен для принятия окончательного решения в отношении подозрительной зоны.
Во втором и третьем способах реконструированное трехмерное изображение досматриваемого объекта и реконструированное трехмерное изображение указанной подозрительной зоны являются картинами распределения по меньшей мере одной физической характеристики. Здесь физическая характеристика связана с типом источника излучения. Как уже указывалось, если используется источник радиации с одним уровнем энергии излучения, то физической характеристикой является коэффициент ослабления досматриваемого объекта. Если же используется источник радиации с двумя уровнями энергии излучения, то физическая характеристика включает одну или несколько характеристик, выбранных из атомного числа, плотности электронов и коэффициента ослабления досматриваемого объекта, для первого уровня энергии излучения, и коэффициент ослабления досматриваемого объекта для второго уровня энергии излучения. Трехмерное изображение может быть реконструировано в отношении каждой физической характеристики. При реконструкции трехмерного изображения блок сбора информации пересылает полученные проекционные данные в главный компьютер управления и обработки информации, который осуществляет реконструкцию этих проекционных данных в форме изображения распределения физической характеристики с использованием алгоритма КТ-реконструкции. Если источник радиации обеспечивает два уровня энергии излучения, то трехмерное изображение реконструируется с использованием алгоритма КТ-реконструкции для двух уровней энергии излучения.
При выполнении стадии 102 блок сбора информации передает полученные проекционные данные в главный компьютер управления и обработки информации. Именно в этом устройстве принимается решение о наличии или отсутствии подозрительной зоны в досматриваемом объекте в соответствии с одним из трех вышеуказанных способов.
В частности, стадии 101 и 102 могут выполняться синхронно, то есть, вывод о наличии или отсутствии какой-либо подозрительной зоны опасных предметов делается сразу же после завершения сканирования. Установка досмотра грузов выполняет быстрое спиральное сканирование всего досматриваемого объекта: после выполнения сканирования от нижней части досматриваемого объекта до его верхней части, вращение несущего устройства прекращается, движение источника 1 радиации с двумя уровнями энергии излучения и матрицы 3 детекторов прекращается, и они выключаются, и главный компьютер управления и обработки информации отображает решение о наличии или отсутствии подозрительной зоны.
Если на стадии 102 подозрительная зона не найдена, то досматриваемый объект будет удален с несущего устройства с помощью транспортировочного устройства, и все части системы возвращаются в их исходное положение для проведения досмотра следующего объекта. Если же на стадии 102 обнаружена подозрительная зона, то выполняется стадия 103.
На стадии 103 выполняется сканирование по меньшей мере одного среза найденной подозрительной зоны с использованием пучка излучения со второй точностью, и блок сбора информации получает проекционные данные при просвечивании этого по меньшей мере одного среза. Вторая точность выше, чем первая точность, используемая на стадии 101. Например, вторая точность примерно равна точности обычного КТ-сканирования или спирального КТ-сканирования. Упомянутый по меньшей мере один срез может быть одним или несколькими срезами в подозрительной зоне, и эти срезы могут быть последовательными в пространстве или выборочными (с разрывами последовательности срезов). Поскольку на стадии 103 сканирование проводится только для подозрительной зоны, то время сканирования очевидно меньше времени обычного КТ-сканирования или спирального КТ-сканирования всего досматриваемого объекта.
При выполнении стадии 103 может осуществляться последовательное сканирование пучком излучения всех срезов по замкнутой спиральной траектории. В этом случае источник радиации и блок сбора информации двигаются синхронно по вертикали и останавливаются после достижения положения по вертикали среза, подлежащего проверке, при этом главный компьютер управления и обработки информации управляет несущим устройством для обеспечения вращения досматриваемого объекта с постоянной скоростью. Источник радиации испускает пучок излучения, проходящий через указанный срез, и блок сбора информации получает проекционные данные. Если осуществляется сканирование нескольких срезов в подозрительной зоне, то вышеописанная операция сканирования может быть повторена.
При выполнении стадии 103 для нескольких срезов в подозрительной зоне, которые следуют в пространстве один за другим, осуществляется спиральное сканирование таких нескольких срезов. В этом случае источник радиации и блок сбора информации двигаются по вертикали к вертикальному положению, в котором находится самый нижний из указанных нескольких срезов. Затем главный компьютер управления и обработки информации управляет несущим устройством для обеспечения вращения досматриваемого объекта с постоянной скоростью, и источник радиации и блок сбора информации двигаются синхронно вверх по вертикали по направлению к самому верхнему из указанных нескольких срезов. При выполнении этой операции источник радиации испускает пучок излучения, проходящий через указанные срезы, и блок сбора информации получает проекционные данные при просвечивании срезов. В этом случае спиральное сканирование примерно такое же, как и обычное спиральное КТ-сканирование. Например, величина шага спирального сканирования может находиться в диапазоне 0,5-1,0.
На стадии 104 томографическое изображение каждого среза реконструируется на основе проекционных данных, полученных на стадии 103, и реконструированное томографическое изображение используется для принятия решения о наличии или отсутствии каких-либо опасных предметов в подозрительной зоне. Томографическое изображение может представлять собой картину распределения физической характеристики в срезе. В данном случае взаимосвязь физической характеристики и типа источника радиации такая же, как была указана выше. Подробное описание здесь не приводится. На стадии 104 блок сбора информации пересылает проекционные данные, полученные при просвечивании срезов объекта, в главный компьютер управления и обработки информации, который осуществляет реконструкцию этих проекционных данных в форме изображения распределения физической характеристики с использованием алгоритма КТ-реконструкции. Если источник радиации обеспечивает два уровня энергии излучения, то томографические изображения реконструируются с использованием алгоритма КТ-реконструкции для двух уровней энергии излучения. Если эти срезы следуют в пространстве один за другим (без пропусков), то полученные томографические изображения могут быть объединены в одно трехмерное изображение, которое используется для принятия решения о наличии или отсутствии каких-либо опасных предметов в подозрительной зоне. Главный компьютер управления и обработки информации может отображать томографическое изображение и/или трехмерное изображение для просмотра сотрудником, проводящим досмотр.
После стадии 104, если делается вывод об отсутствии опасных предметов, то для удаления досмотренного объекта с несущего устройства используется транспортировочное средство, и установка досмотра грузов возвращается в исходное состояние для проведения досмотра следующего объекта.
Если подозрения в отношении опасного предмета в подозрительной зоне после выполнения стадии 104 не снимаются, то досматриваемый объект может быть направлен сотруднику, проводящему досмотр для проведения ручного досмотра, и система досмотра грузов возвращается в исходное состояние для проведения досмотра следующего объекта.
В установке досмотра грузов, в которой осуществляется предлагаемый в настоящем изобретении способ, должны быть заданы такие параметры, как перечень опасных предметов и порог срабатывания для каждого типа опасного предмета, что требует консультаций с соответствующими специалистами, и такие параметры возможно должны корректироваться с учетом изменений условий досмотра и уровней необходимой безопасности.
Такие функции досмотровой установки, как управление механическими и электрическими компонентами, передача данных, реконструкция изображений, обработка информации и автоматическое определение опасных предметов полностью выполняются компьютерами. Направления передачи информации и управляющих сигналов показаны на фигуре 3, на которой сплошными линиями обозначены управляющие сигналы, а пунктирные линии указывают информационные потоки. Программное обеспечение подсистемы работы/досмотра исполняется на рабочей станции для получения проекционных данных при просвечивании объекта и информации о его положении, а алгоритм автоматического выявления опасных предметов выполняется для принятия решения и выдачи управляющей команды. На дисплее могут быть отображены различные изображения для проверки их сотрудником, проводящим досмотр. При необходимости сотрудник, проводящий досмотр, может вводить в компьютер команды управления для участия в выполнении алгоритма выявления опасных предметов.
В описании были рассмотрены только варианты осуществления настоящего изобретения, и они никоим образом не ограничивают его объем. В соответствии с вышеприведенным описанием средний специалист в данной области техники очевидно может предложить некоторые альтернативные решения, которые все должны быть включены в объем охраны настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ДОСМОТРА ГРУЗОВ | 2007 |
|
RU2386954C1 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ ПРОСВЕЧИВАНИЯ ИЗЛУЧЕНИЕМ ПОД РАЗНЫМИ УГЛАМИ | 2007 |
|
RU2400735C2 |
| СПОСОБ И УСТАНОВКА (ВАРИАНТЫ) ДЛЯ ДОСМОТРА ОБЪЕКТОВ, СОДЕРЖАЩИХ ЖИДКОСТИ | 2008 |
|
RU2445609C2 |
| УСТАНОВКА И СПОСОБ ОБНАРУЖЕНИЯ КОНТРАБАНДЫ В АВИАЦИОННЫХ ГРУЗОВЫХ КОНТЕЙНЕРАХ | 2008 |
|
RU2390006C1 |
| УСТАНОВКА ДЛЯ ОБНАРУЖЕНИЯ КОНТРАБАНДЫ В АВИАЦИОННЫХ ГРУЗОВЫХ КОНТЕЙНЕРАХ | 2008 |
|
RU2390761C1 |
| СПОСОБ И УСТАНОВКА РАДИАЦИОННОГО КОНТРОЛЯ ЖИДКИХ ОБЪЕКТОВ | 2006 |
|
RU2372610C1 |
| СИСТЕМЫ СПИРАЛЬНОЙ КТ И СПОСОБЫ РЕКОНСТРУКЦИИ | 2015 |
|
RU2595312C1 |
| КОМПЬЮТЕРНЫЙ ТОМОГРАФ | 2013 |
|
RU2553184C1 |
| ТОМОГРАФИЧЕСКАЯ СКАНИРУЮЩАЯ ДОСМОТРОВАЯ УСТАНОВКА И СПОСОБ СКАНИРОВАНИЯ | 2008 |
|
RU2383882C2 |
| СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2006 |
|
RU2343458C2 |
Использование: для досмотра грузов с использованием спирального сканирования. Сущность заключается в том, что осуществляют спиральное сканирование досматриваемого объекта с первой точностью пучком излучения, охватывающим досматриваемый объект спиралью, величина шага которой находится в диапазоне 5-10 относительных шагов, получают проекционные данные в блоке сбора информации, принимают решение о наличии или отсутствии подозрительной зоны в досматриваемой зоне на основе проекционных данных, и если подозрительная зона не обнаружена, то на этом досмотр заканчивается, а если обнаружена подозрительная зона, то выполняется сканирование, по меньшей мере, одного среза указанной подозрительной зоны со второй точностью с получением проекционных данных в блоке сбора информации, причем вторая точность выше, чем первая точность, после чего осуществляется реконструкция томографического изображения указанного, по меньшей мере, одного среза на основе проекционных данных, полученных на стадии сканирования со второй точностью, и использование реконструированного томографического изображения для принятия решения о наличии или отсутствии каких-либо опасных предметов в подозрительной зоне. Технический результат: обеспечение возможности быстрого и точного досмотра грузов. 18 з.п. ф-лы, 3 ил.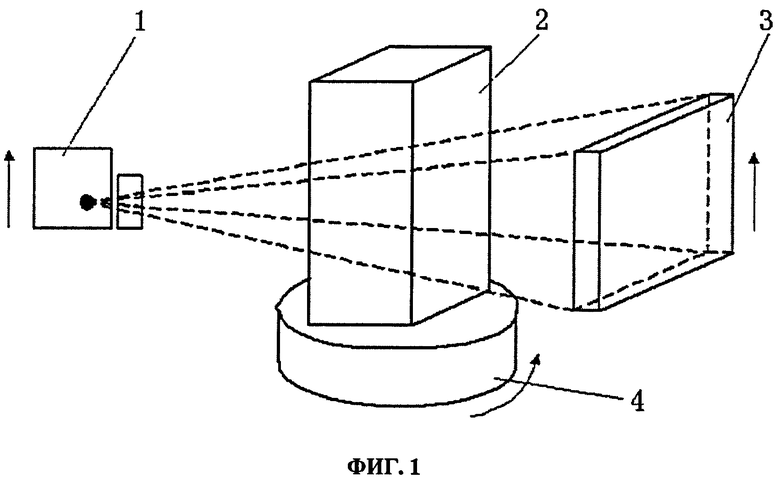
1. Способ досмотра грузов с использованием спирального сканирования для проверки досматриваемого объекта с помощью установки досмотра грузов, которая содержит источник радиации для получения пучка излучения и блок сбора информации для получения проекционных данных при просвечивании объекта пучком излучения, причем способ содержит следующие стадии:
стадия А: спиральное сканирование досматриваемого объекта с первой точностью пучком излучения, охватывающим досматриваемый объект спиралью, величина шага которой находится в диапазоне 5-10 относительных шагов, и получение проекционных данных в блоке сбора информации;
стадия В: принятие решения о наличии или отсутствии подозрительной зоны в досматриваемой зоне на основе проекционных данных, и если обнаружена подозрительная зона, то выполняется стадия С, и если подозрительная зона не обнаружена, то на этом досмотр заканчивается;
стадия С: сканирование по меньшей мере одного среза указанной подозрительной зоны со второй точностью с использованием пучка излучения и получение проекционных данных при просвечивании излучением по меньшей мере одного среза в блоке сбора информации, причем вторая точность выше, чем первая точность на стадии А;
стадия D: реконструкция томографического изображения указанного по меньшей мере одного среза на основе проекционных данных, полученных на стадии С, и использование реконструированного томографического изображения для принятия решения о наличии или отсутствии каких-либо опасных предметов в подозрительной зоне.
2. Способ по п.1, отличающийся тем, что установка досмотра грузов содержит дополнительно несущее устройство для удерживания досматриваемого объекта, причем на стадии А несущее устройство вращается вместе с находящимся на нем досматриваемым объектом в плоскости вращения, и, кроме того, пучок излучения и блок сбора данных синхронно перемещаются поступательно в направлении, перпендикулярном плоскости вращения досматриваемого объекта.
3. Способ по п.1, отличающийся тем, что стадия В содержит обработку проекционных данных с использованием алгоритма досмотра опасных объектов и поиска подозрительной зоны на основе полученных проекционных данных.
4. Способ по п.1, отличающийся тем, что стадия В содержит использование проекционных данных досматриваемого объекта для реконструкции его трехмерного изображения и использование этого трехмерного изображения для поиска подозрительной зоны.
5. Способ по п.1, отличающийся тем, что стадия В содержит обработку полученных проекционных данных с использованием алгоритма досмотра опасных объектов и поиска подозрительной зоны, и затем осуществление на основе полученных проекционных данных для этой подозрительной зоны реконструкции ее трехмерного изображения, в результате чего на основе анализа этого трехмерного изображения подтверждается или отклоняется предположение о подозрительности выявленной зоны.
6. Способ по п.4 или 5, отличающийся тем, что трехмерное изображение является изображением распределения по меньшей мере одной физической характеристики.
7. Способ по п.6, отличающийся тем, что изображение распределения физической характеристики реконструируется с использованием алгоритма КТ-реконструкции.
8. Способ по п.1, отличающийся тем, что источник радиации является источником с одним уровнем энергии излучения или источником с двумя уровнями энергии излучения.
9. Способ по п.6, отличающийся тем, что источник радиации вырабатывает пучок излучения с одним уровнем энергии, и указанная по меньшей мере одна физическая характеристика является коэффициентом ослабления досматриваемого объекта для одного уровня энергии.
10. Способ по п.6, отличающийся тем, что источник радиации является источником с двумя уровнями энергии излучения, который испускает пучок излучения с первым уровнем энергии и пучок излучения со вторым уровнем энергии, который отличается от первого уровня, и по меньшей мере одна физическая характеристика включает одну или несколько характеристик, выбранных из атомного числа, плотности электронов и коэффициента ослабления досматриваемого объекта, для первого уровня энергии, и коэффициент ослабления досматриваемого объекта для второго уровня энергии.
11. Способ по п.1, отличающийся тем, что на стадии D трехмерное изображение является изображением распределения по меньшей мере одной физической характеристики среза.
12. Способ по п.11, отличающийся тем, что изображение распределения физической характеристики среза реконструируется с использованием алгоритма КТ-реконструкции.
13. Способ по п.11, отличающийся тем, что источник радиации является источником с одним уровнем энергии излучения, и указанная по меньшей мере одна физическая характеристика является коэффициентом ослабления досматриваемого объекта для одного уровня энергии.
14. Способ по п.13, отличающийся тем, что источник радиации является источником с двумя уровнями энергии излучения, который испускает пучок излучения с первым уровнем энергии и пучок излучения со вторым уровнем энергии, который отличается от первого уровня, и по меньшей мере одна физическая характеристика включает одну или несколько характеристик, выбранных из атомного числа, плотности электронов и коэффициента ослабления досматриваемого объекта, для первого уровня энергии, и коэффициент ослабления досматриваемого объекта для второго уровня энергии.
15. Способ по п.1, отличающийся тем, что на стадии С осуществляется сканирование каждого отдельного среза пучком излучения по замкнутой спиральной траектории.
16. Способ по п.1, отличающийся тем, что на стадии С по меньшей мере один срез является несколькими срезами в подозрительной зоне.
17. Способ по п.16, отличающийся тем, что на стадии С осуществляется спиральное сканирование пучком излучения указанных нескольких срезов.
18. Способ по п.16, отличающийся тем, что стадия D содержит дополнительно объединение томографических изображений нескольких срезов в одно трехмерное изображение и принятие решения на основе трехмерного изображения о наличии или отсутствии опасного предмета в подозрительной зоне.
19. Способ по п.1 или 18, отличающийся тем, что дополнительно осуществляется отображение томографического изображения и/или трехмерного изображения.
| Устройство для измерения хроматической дисперсии одномодовых волоконных световодов | 1988 |
|
SU1645868A1 |
| US 2005276376 A1, 15.12.2005 | |||
| СПОСОБ ЭКСПРЕСС-ДИАГНОСТИКИ ПЕЦИЛОМИКОЗА | 2005 |
|
RU2287163C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ НЕРАЗРЕШЕННЫХ ПРЕДМЕТОВ | 2000 |
|
RU2253861C2 |
| US 2004109532 A1, 10.06.2004 | |||
| US 5182764 A, 26.01.1993. | |||

