Изобретение относится к области организации и управления движением на железных дорогах и может быть использовано для точного определения местонахождения рельсовых транспортных средств.
Известна система контроля технологической дисциплины процесса управления движением поездов, включающая центральный web-портал, по меньшей мере, один центральный обрабатывающий комплекс, по меньшей мере, одно автоматизированное рабочее место контроля выполнения технологических норм управления движением поездов, автоматическую систему управления железнодорожным транспортом, по меньшей мере, один управляющий вычислительный комплекс, двухконтурную систему взаимодействия с тяговым подвижным составом, в которой автоматическая система управления железнодорожным транспортом содержит базу исходных данных, а также осуществляет сбор данных с технических средств железнодорожной автоматики и телемеханики и их передачу на центральный обрабатывающий комплекс, совокупность центрального обрабатывающего комплекса, осуществляющего сбор, обработку, анализ данных, связь с автоматизированными рабочими местами, и автоматизированных рабочих мест выполняет функции контроля технологической дисциплины, обучения персонала, оперативной системы поддержки принятия решений на уровне дорожного центра управления перевозками, первый контур системы взаимодействия с тяговым подвижным составом, обеспечивающий безопасность движения поездов, включает технические средства железнодорожной автоматики и телемеханики, комплексное локомотивное устройство безопасности, взаимодействующее с тяговым подвижным составом по радиоканалу с использованием радиомодемов, и межконтурную систему взаимодействия, при этом сбор данных с комплексного локомотивного устройства безопасности и с технических средств железнодорожной автоматики и телемеханики, их обработку и подготовку к передаче на тяговый подвижной состав осуществляют при помощи управляющего вычислительного комплекса, далее информация посредством межконтурной системы взаимодействия поступает в центральный обрабатывающий комплекс, второй технологический контур системы взаимодействия с тяговым подвижным составом, включает бортовые приборы управления за исключением комплексного локомотивного устройства безопасности, устройство цифрового взаимодействия, обеспечивающее взаимодействие с автоматической системой управления железнодорожным транспортом, с одной стороны, и с бортовыми приборами - с другой, перевозную радиостанцию, систему цифровой радиосвязи, обеспечивающую связь с центральным обрабатывающим комплексом, управляющим тяговым подвижным составом, центральный web-портал осуществляет анализ представленных из центрального обрабатывающего комплекса данных в наглядном виде. Центральный обрабатывающий комплекс представляет собой сервер, устанавливаемый преимущественно в дорожных центрах управления перевозками, в отдельных крупных центрах управления местной работой и на станциях, и осуществляет функции мониторинга. Автоматизированное рабочее место представляет собой персональный компьютер, обеспечивающей диалог в реальном масштабе времени. Автоматическая система управления железнодорожным транспортом состоит из системы диспетчерского контроля и централизации, информационной системы, ведущей поездную модель дорог, на основании которой и с использованием данных технических средств железнодорожной автоматики и телемеханики и ручного ввода ведется электронный график исполненного движения (патент RU 2307041).
Известная система не исключает ручного ввода части информации, не исключает влияния человеческих факторов на объективность информации, содержащейся в документах.
Известна также система контроля движения железнодорожного транспортного средства, содержащая, по меньшей мере, один идентификатор пути, установленный на трассе прохождения указанного транспортного средства, расположенные на указанном железнодорожном транспортном средстве средство возбуждения сигнала указанного идентификатора пути и средство регистрации сигнала указанного идентификатора пути и бортовое вычислительное средство, выполненное с возможностью анализа указанного отклика, отличающаяся тем, что бортовое вычислительное средство содержит информацию о профиле железнодорожного пути и выполнено с возможностью передачи информации в диспетчерский пункт, а также с возможностью приема сигнала, характеризующего самочувствие машиниста, и передачи управляющих сигналов на силовую и тормозную систему транспортного средства, а также бортовое вычислительное средство выполнено с возможностью подключения к системе контроля состояния транспортного средства и/или с возможностью подключения к системе противопожарной безопасности. При этом профиль железнодорожного пути задан в виде трехмерной карты. Система также содержит устройство спутниковой навигации. При этом бортовое вычислительное средство выполнено с возможностью автоматической передачи информации в диспетчерский пункт. Кроме того, система содержит более одного идентификатора пути, расположенных по трассе следования железнодорожного транспортного средства, при этом каждый идентификатор пути имеет свой идентификационный номер, введенный в программу бортового вычислительного средства и передаваемый идентификатором на транспортное средство. Система также содержит видеокамеру (патент RU 2284938).
Известная система не обеспечивает высокой точности определения координат нахождения транспортного средства.
Технической задачей данного изобретения является повышение уровня комплексной безопасности движения на сети железных дорог, обеспечение роста эффективности перевозок за счет повышения достоверности информации о проведенной перевозочной работе.
Поставленная задача решается в системе определения местоположения железнодорожных транспортных средств, содержащей автоматизированное рабочее место нарядчика депо (АРМ ТЧН), автоматизированное рабочее место дежурного по депо (АРМ ТЧД), автоматизированное рабочее место сотрудника бюро учета депо (АРМ ТЧУ), автоматизированное рабочее место дежурного по станции и дежурного по парку (АРМ ДСП и ДСПП), автоматизированное рабочее место (АРМ) распределения информации по системам анализа режима ведения железнодорожного транспортного средства (ЖТС), внешние датчики ЖТС, контрольный пост депо, информационный вычислительный центр (ИВЦ) дороги, а также расположенные на ЖТС персональный электронный ключ машиниста (ПЭКМ), бортовую аппаратуру глобальной навигационной спутниковой системы (ГЛОНАСС), соединенную шиной обмена с первым входом ПЭКМ, экран машиниста и экран помощника машиниста, подсоединенные соответственно к первому и второму выходам бортовой аппаратуры ГЛОНАСС, второй вход которой является входом сигналов, подаваемых от внешних датчиков ЖТС, при этом второй, третий и четвертый входы ПЭКМ являются соответственно входами информационных сигналов от АРМ ТЧН, АРМ ТЧД и контрольного поста депо, второй и третий выходы ПЭКМ являются соответственно выходами сигналов, подаваемых на АРМ ДСП и ДСПП и АРМ распределения информации по системам анализа режима ведения ЖТС, первый, второй, третий и четвертый выходы АРМ распределения информации по системам анализа режима ведения ЖТС являются соответственно выходами сигналов, подаваемых на ИВЦ дороги, АРМ ТЧУ, АРМ ТЧД и АРМ ТЧН.
Поставленная задача также достигается в системе определения местоположения железнодорожных транспортных средств, содержащей автоматизированное рабочее место нарядчика депо (АРМ ТЧН), автоматизированное рабочее место дежурного по депо (АРМ ТЧД), автоматизированное рабочее место сотрудника бюро учета депо (АРМ ТЧУ), автоматизированное рабочее место дежурного по станции и дежурного по парку (АРМ ДСП и ДСПП), внешние датчики ЖТС, контрольный пост депо, информационный вычислительный центр (ИВЦ) дороги, а также расположенные на ЖТС персональный электронный ключ машиниста (ПЭКМ), бортовую аппаратуру глобальной навигационной спутниковой системы (ГЛОНАСС), соединенную шиной обмена с первым входом ПЭКМ, экран машиниста и экран помощника машиниста, подсоединенные соответственно к первому и второму выходам бортовой аппаратуры ГЛОНАСС, при этом второй, третий и четвертый входы ПЭКМ являются соответственно входами информационных сигналов от АРМ ТЧН, АРМ ТЧД и контрольного поста депо, второй и третий выходы ПЭКМ являются соответственно выходами сигналов, подаваемых на АРМ ДСП и ДСПП и АРМ ТЧУ, а выход АРМ ТЧУ является выходом сигнала, подаваемого на ИВЦ дороги.
При этом бортовая аппаратура ГЛОНАСС состоит из бортовой ЭВМ, двух приемников радионавигационных сигналов, связанных соответственно с антенными блоками, и средства приема-передачи данных, включающего приемо-передающую антенну, соединенную с приемопередатчиком, при этом средство приема-передачи данных соединено шиной обмена данными с ЭВМ, выходы приемников радионавигационных сигналов подсоединены соответственно к первому и второму входам ЭВМ, третий вход ЭВМ является вторым входом, а первый и второй выходы ЭВМ - соответственно вторым и третьим выходами бортовой аппаратуры ГЛОНАСС.
Персональный электронный ключ машиниста выполнен в виде переносного блока хранения информации, размещенного в ударопрочном корпусе и снабженного разъемом для подсоединения к приемнику сигналов ГЛОНАСС.
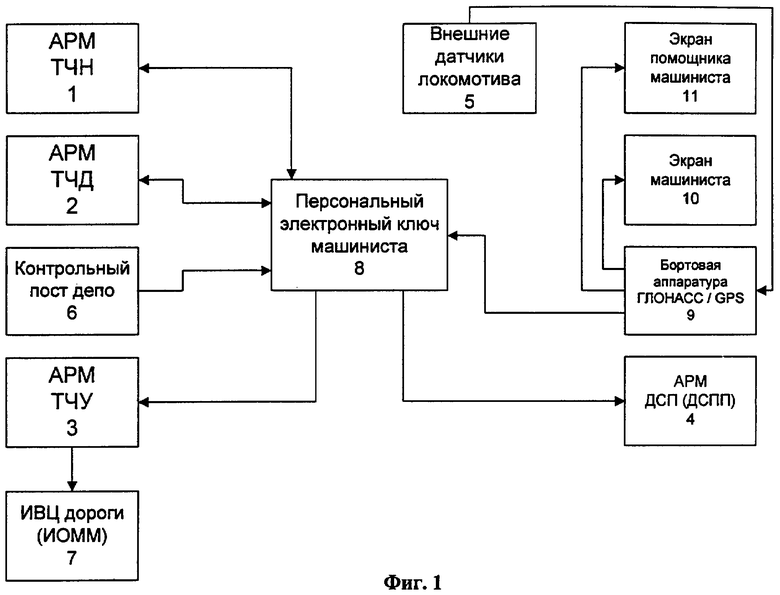
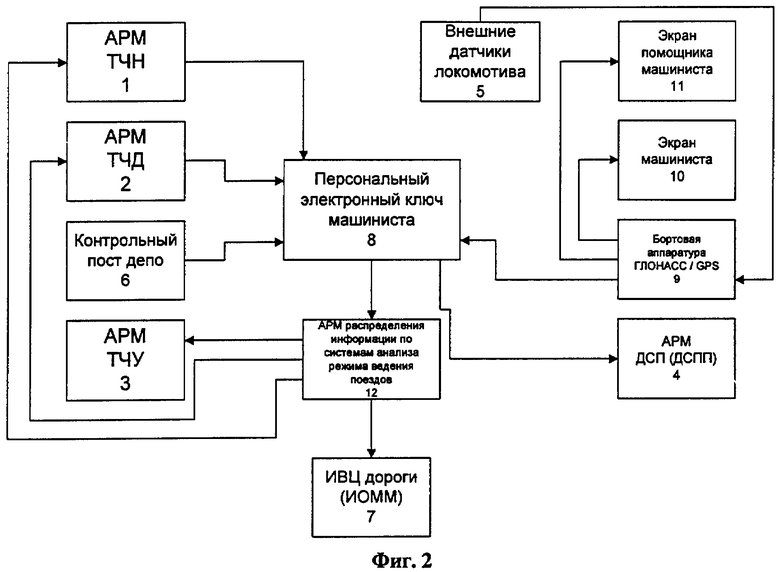
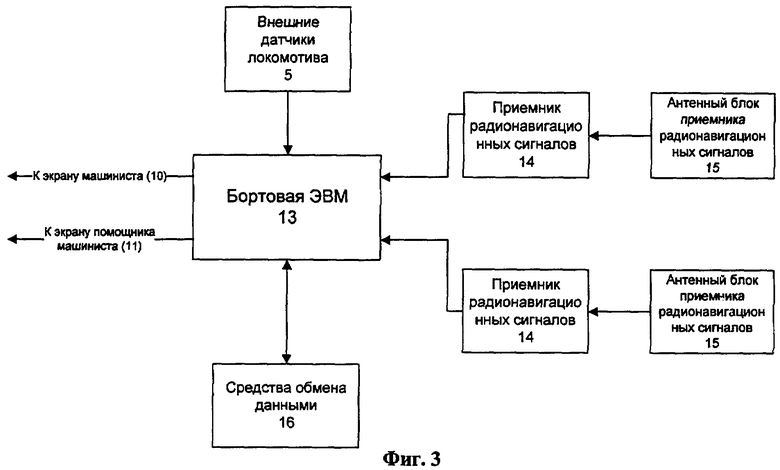
На фиг.1 приведена структурная электрическая схема системы определения местоположения железнодорожных транспортных средств по первому варианту; на фиг.2 - структурная электрическая схема системы определения местоположения железнодорожных транспортных средств по второму варианту; на фиг.3 - структурная электрическая схема бортовой аппаратуры ГЛОНАСС.
Система определения местоположения железнодорожных транспортных средств по первому варианту (фиг.1) содержит автоматизированное рабочее место нарядчика депо (АРМ ТЧН) 1, автоматизированное рабочее место дежурного по депо (АРМ ТЧД) 2, автоматизированное рабочее место сотрудника бюро учета депо (АРМ ТЧУ) 3, автоматизированное рабочее место дежурного по станции и дежурного по парку (АРМ ДСП и ДСПП) 4, внешние датчики 5 ЖТС, контрольный пост депо 6, информационный вычислительный центр (ИВЦ) дороги 7, а также расположенные на ЖТС персональный электронный ключ машиниста (ПЭКМ) 8, бортовую аппаратуру глобальной навигационной спутниковой системы (ГЛОНАСС) 9, соединенную шиной обмена с первым входом ПЭКМ 8, экран машиниста 10 и экран помощника машиниста 11, подсоединенные соответственно к первому и второму выходам бортовой аппаратуры ГЛОНАСС 9, второй вход которой является входом сигналов, подаваемых от внешних датчиков 5 ЖТС, при этом второй, третий и четвертый входы ПЭКМ 8 являются соответственно входами информационных сигналов от АРМ ТЧН 1, АРМ ТЧД 2 и контрольного поста депо 6, второй и третий выходы ПЭКМ 8 являются соответственно выходами сигналов, подаваемых на АРМ ДСП и ДСПП 4 и АРМ 12 распределения информации по системам анализа режима ведения ЖТС, первый, второй, третий и четвертый выходы АРМ 12 распределения информации по системам анализа режима ведения ЖТС являются соответственно выходами сигналов, подаваемых на ИВЦ дороги 7, АРМ ТЧУ 3, АРМ ТЧД 2 и АРМ ТЧН 1.
Система определения местоположения железнодорожных транспортных средств по второму варианту (фиг.2) содержит автоматизированное рабочее место нарядчика депо (АРМ ТЧН) 1, автоматизированное рабочее место дежурного по депо (АРМ ТЧД) 2, автоматизированное рабочее место сотрудника бюро учета депо (АРМ ТЧУ) 3, автоматизированное рабочее место дежурного по станции и дежурного по парку (АРМ ДСП и ДСПП) 4, внешние датчики 5 ЖТС, контрольный пост депо 6, информационный вычислительный центр (ИВЦ) дороги 7, а также расположенные на ЖТС персональный электронный ключ машиниста (ПЭКМ) 8, бортовую аппаратуру 9 глобальной навигационной спутниковой системы (ГЛОНАСС), соединенную шиной обмена с первым входом ПЭКМ 8, экран машиниста 10 и экран помощника машиниста 11, подсоединенные соответственно к первому и второму выходам бортовой аппаратуры ГЛОНАСС 9, при этом второй, третий и четвертый входы ПЭКМ 8 являются соответственно входами информационных сигналов от АРМ ТЧН 1, АРМ ТЧД 2 и контрольного поста депо 6, второй и третий выходы ПЭКМ 8 являются соответственно выходами сигналов, подаваемых на АРМ ДСП и ДСПП 4 и АРМ ТЧУ 3, а выход АРМ ТЧУ 3 является выходом сигнала, подаваемого на ИВЦ дороги 7.
Бортовая аппаратура 9 ГЛОНАСС состоит из бортовой ЭВМ 13, двух приемников 14 радионавигационных сигналов, связанных соответственно с антенными блоками 15, и средства приема-передачи данных 16, включающего приемо-передающую антенну, соединенную с приемопередатчиком (на чертеже не показаны), при этом средство приема-передачи данных 16 соединено шиной обмена данными с ЭВМ 13, выходы приемников 14 радионавигационных сигналов подсоединены соответственно к первому и второму входам ЭВМ 13, третий вход ЭВМ 13 является вторым входом, а первый и второй выходы ЭВМ 13 - соответственно вторым и третьим выходами бортовой аппаратуры ГЛОНАСС.
Персональный электронный ключ машиниста 8 выполнен в виде переносного блока хранения информации, размещенного в ударопрочном корпусе и снабженного разъемом для подсоединения к бортовой аппаратуре ГЛОНАСС 9.
Появление спутниковых навигационных систем и возможности их использования на железнодорожном транспорте создает предпосылки создания принципиально новых технологий сбора и регистрации информации для систем управления перевозками, обеспечения безопасности движения поездов, расчета статистических показателей и т.д. При оснащении локомотивов, дрезин, путевых машин, вагонов-лабораторий и других специальных подвижных единиц бортовой аппаратурой системы ГЛОНАСС появляется возможность использовать подобные накопители для фиксации информации о движении локомотива, операциях с ним на протяжении всей поездки.
Для реализации этой технологии служит блок хранения информации - защищенной памяти, так называемый "переносный электронный ключ машиниста", заключенный в металлический корпус и снабженный разъемом, исключающим возможность несанкционированного доступа к данным и использование этого блока не по назначению.
Работа системы заключается в следующем. При явке машиниста в депо для выполнения поездки он приходит к нарядчику локомотивных бригад. Нарядчик выдает машинисту ПЭКМ 8 вместо бумажного бланка маршрута машиниста, в который введена информация о фамилии и табельном номере машиниста, времени явки бригады, код депо приписки бригады, информацию от АРМ ТЧН 1. После этого машинист вместе с ПЭКМ 8 приходит к дежурному по депо, который вводит в память ПЭКМ 8 информацию о коде серии локомотива и его номере - информацию от контрольного поста депо 6.
В процессе приемки железнодорожного транспортного средства машинист обязан вставить электронный ключ 8 в разъем бортовой аппаратуры ГЛОНАСС 9. Бортовая ЭВМ 16 блокирует систему управления движением локомотива при отсутствии введенного ПКЭМ 8.
Перед отправлением локомотива из АРМ ДСП и ДСПП 4 передается информация о составе поезда: индекс поезда, вес нетто и брутто, количество вагонов по родам подвижного состава (груженных и порожних), длина состава в условных вагонах или метрах, информация о предупреждениях с указанием мест, при проследовании которых требуется снижение скорости, и мест производства путевых работ с указанием условий движения по ним. Информация о предупреждениях, весе поезда брутто, наличии опасных и негабаритных грузов в поезде кроме записи в память ПЭКМ 8 выводится на экран машиниста 10 и экран 11 помощника машиниста.
Информация от бортовой аппаратуры 9 ГЛОНАСС - место нахождения локомотива, скорость его движения, время прибытия, отправления или проследования всех станций, остановок на перегонах и отправлении после таких остановок, фиксируется в памяти ПЭКМ 8 в режиме реального времени. Туда же записывается информация о расходе топлива (электроэнергии), отклонениях в работе основных узлов локомотива, режимах ведения поезда (использование позиций контроллера при тяге и степени торможений).
При прохождении поездом раздельного пункта системой ГЛОНАСС фиксируется время проследования. АРМ 12, представляющая собой ЭВМ, формирует и передает в АРМ ТЧУ 3 сообщение с указанием станции и времени проследования (прибытия или отправления). Это сообщение поступает в ИВЦ дороги 7 для последующего использования при построении графика исполненного движения в автоматизированную систему оперативного управления перевозками.
Порядок сдачи ПЭКМ 8 в депо и обработки данных, записанных в его память, определяется местными инструкциями. Инструкцией определяется порядок ввода в память ПЭКМ 8 информации о завершении поездки - время сдачи локомотива, окончании рабочего времени локомотивной бригады и т.д.
АРМ 12 производит считывание информации, записанной в память ПЭКМ 8, ее расшифровку, сортировку и формирование по видам использования. При этом отсортировывается информация, которая используется непосредственно в депо, - рабочее время локомотивной бригады, расход топлива, электроэнергии, сбой в работе узлов и агрегатов локомотива и т.д. Также формируются сообщения установленной структуры для передачи их в ИВЦ дороги 7 по каналам связи и дальнейшей обработке в системе "Интегрированная обработка данных маршрутов машинистов" (ИОММ). На АРМ 12 производится анализ соблюдения скоростного режима и требований безопасности движения, то есть выполнение работы расшифровщиков скоростемерных лент, что позволяет исключить искажение информации.
Таким образом, использование персонального электронного ключа машиниста позволяет в автоматизированном и автоматическом режимах получить полную, достоверную информацию для функционирования системы ИОММ, а также автоматизировать процесс анализа соблюдения скоростного режима и соблюдения предупреждений. При этом вообще отпадает необходимость в установке на поездных локомотивах скоростемеров, что исключает необходимость их выпуска, ремонта, обслуживания и содержания штата расшифровщиков лент. Точность и надежность определения местоположения достигается за счет использования на борту локомотива 2 приемников радионавигационных сигналов для уточнения координатного решения, полученного по данным измерений сигналов спутниковых радионавигационных систем ГЛОНАСС/GPS за счет использования в расчете известного расстояния между антенными блоками приемников радионавигационных сигналов, учет информации, поступающей от различных служб железнодорожного транспорта для решения задач управления движением, записанной в памяти электронного ключа машиниста, позволяет с высокой точностью и надежностью определять местоположение транспортного средства. Использование электронного ключа машиниста позволяет отказаться от ведения бумажного бланка маршрута машиниста.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ЛОКОМОТИВНЫХ БРИГАД НА ЖЕЛЕЗНОДОРОЖНОМ НАПРАВЛЕНИИ | 2013 |
|
RU2574049C2 |
| ЦИФРОВАЯ СИСТЕМА ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ТЕХНОЛОГИЧЕСКОЙ СВЯЗИ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2021 |
|
RU2771937C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ОБЪЕДИНЕННЫМ ПАРКОМ ЛОКОМОТИВОВ ГРУЗОВОГО ДВИЖЕНИЯ НА ПОЛИГОНЕ ОБРАЩЕНИЯ | 2013 |
|
RU2555393C2 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| Интегрированная система управления движением поездов на участке | 2020 |
|
RU2749159C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЕЗДНОЙ РАБОТОЙ ГРУЗОВЫХ ПОЕЗДОВ ПО РАСПИСАНИЮ НА ЖЕЛЕЗНОДОРОЖНОМ НАПРАВЛЕНИИ | 2013 |
|
RU2541551C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНЕВРОВЫМ ЛОКОМОТИВОМ | 2020 |
|
RU2732266C1 |
Изобретение относится к области организации и управления движением на железных дорогах. Система по первому и второму варианту содержит автоматизированное рабочее место нарядчика депо (АРМ ТЧН), автоматизированное рабочее место дежурного по депо (АРМ ТЧД), автоматизированное рабочее место сотрудника бюро учета депо (АРМ ТЧУ), автоматизированное рабочее место дежурного по станции и дежурного по парку (АРМ ДСП), внешние датчики железнодорожного транспортного средства, контрольный пост депо, информационный вычислительный центр дороги (ИВЦ), персональный электронный ключ машиниста (ПЭКМ), бортовую аппаратуру глобальной навигационной спутниковой системы. Система по первому варианту дополнительно содержит автоматизированное рабочее место (АРМ) распределения информации по системам анализа режима ведения железнодорожного транспортного средства. При этом первый, второй, третий и четвертый выходы (АРМ) распределения информации по системам анализа режима ведения железнодорожного транспортного средства являются соответственно выходами сигналов, подаваемых на ИВЦ дороги, АРМ ТЧУ, АРМ ТЧД и АРМ ТЧН. В системе по второму варианту второй и третий выходы ПЭКМ являются соответственно выходами сигналов, подаваемых на АРМ ДСП и ДСПП и АРМ ТЧУ, а выход АРМ ТЧУ является выходом сигнала, подаваемого на ИВЦ дороги. Технический результат заключается в повышении комплексной безопасности движения на сети железных дорог. 2 н. и 4 з.п. ф-лы, 3 ил.
1. Система определения местоположения железнодорожных транспортных средств, содержащая автоматизированное рабочее место нарядчика депо (АРМ ТЧН), автоматизированное рабочее место дежурного по депо (АРМ ТЧД), автоматизированное рабочее место сотрудника бюро учета депо (АРМ ТЧУ), автоматизированное рабочее место дежурного по станции и дежурного по парку (АРМ ДСП и ДСПП), автоматизированное рабочее место (АРМ) распределения информации по системам анализа режима ведения железнодорожного транспортного средства (ЖТС), внешние датчики ЖТС, контрольный пост депо, информационный вычислительный центр (ИВЦ) дороги, а также расположенные на ЖТС персональный электронный ключ машиниста (ПЭКМ), бортовую аппаратуру глобальной навигационной спутниковой системы (ГЛОНАСС), соединенную шиной обмена с первым входом ПЭКМ, экран машиниста и экран помощника машиниста, подсоединенные соответственно к первому и второму выходам бортовой аппаратуры ГЛОНАСС, второй вход которой является входом сигналов, подаваемых от внешних датчиков ЖТС, при этом второй, третий и четвертый входы ПЭКМ являются соответственно входами информационных сигналов от АРМ ТЧН, АРМ ТЧД и контрольного поста депо, второй и третий выходы ПЭКМ являются соответственно выходами сигналов, подаваемых на АРМ ДСП и ДСПП и АРМ распределения информации по системам анализа режима ведения ЖТС, первый, второй, третий и четвертый выходы АРМ распределения информации по системам анализа режима ведения ЖТС являются, соответственно, выходами сигналов, подаваемых на ИВЦ дороги, АРМ ТЧУ, АРМ ТЧД и АРМ ТЧН.
2. Система по п.1, в которой персональный электронный ключ машиниста выполнен в виде переносного блока хранения информации, размещенного в ударопрочном корпусе и снабженного разъемом для подсоединения к бортовой аппаратуре ГЛОНАСС.
3. Система по п.1, в которой бортовая аппаратура ГЛОНАСС состоит из приемопередающей антенны, приемника, передатчика, двух приемников радионавигационных сигналов, двух антенных блоков приемников радионавигационных сигналов и ЭВМ, соединенной с приемником и передатчиком, при этом третий вход ЭВМ является вторым входом, а второй и третий выходы ЭВМ - соответственно вторым и третьим выходами бортовой аппаратуры ГЛОНАСС.
4. Система определения местоположения железнодорожных транспортных средств, содержащая автоматизированное рабочее место нарядчика депо (АРМ ТЧН), автоматизированное рабочее место дежурного по депо (АРМ ТЧД), автоматизированное рабочее место сотрудника бюро учета депо (АРМ ТЧУ), автоматизированное рабочее место дежурного по станции и дежурного по парку (АРМ ДСП и ДСПП), внешние датчики ЖТС, контрольный пост депо, информационный вычислительный центр (ИВЦ) дороги, а также расположенные на ЖТС персональный электронный ключ машиниста (ПЭКМ), бортовую аппаратуру глобальной навигационной спутниковой системы (ГЛОНАСС), соединенную шиной обмена с первым входом ПЭКМ, экран машиниста и экран помощника машиниста, подсоединенные соответственно к первому и второму выходам бортовой аппаратуры ГЛОНАСС, при этом второй, третий и четвертый входы ПЭКМ являются соответственно входами информационных сигналов от АРМ ТЧН, АРМ ТЧД и контрольного поста депо, второй и третий выходы ПЭКМ являются, соответственно, выходами сигналов, подаваемых на АРМ ДСП и ДСПП и АРМ ТЧУ, а выход АРМ ТЧУ является выходом сигнала, подаваемого на ИВЦ дороги.
5. Система по п.4, в которой персональный электронный ключ машиниста выполнен в виде переносного блока хранения информации, размещенного в ударопрочном корпусе и снабженного разъемом для подсоединения к приемнику сигналов ГЛОНАСС.
6. Система по п.4, в которой бортовая аппаратура ГЛОНАСС состоит из приемопередающей антенны, приемника, передатчика, двух приемников радионавигационных сигналов, двух антенных блоков приемников радионавигационных сигналов и ЭВМ, соединенной с приемником и передатчиком, при этом третий вход ЭВМ является вторым входом, а второй и третий выходы ЭВМ - соответственно, вторым и третьим выходами бортовой аппаратуры ГЛОНАСС.
| СИСТЕМА КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2284938C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОПЕРАТИВНОЙ ОБСТАНОВКОЙ НА ЖЕЛЕЗНОЙ ДОРОГЕ, АВТОМАТИЗИРОВАННАЯ СИСТЕМА СЛЕЖЕНИЯ ЗА ОПЕРАТИВНОЙ ОБСТАНОВКОЙ НА ЖЕЛЕЗНОЙ ДОРОГЕ И СИСТЕМА ПЕРЕДАЧИ И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ СЛЕЖЕНИЯ НА ЖЕЛЕЗНОЙ ДОРОГЕ | 2005 |
|
RU2294298C1 |
| US 2001002688 A1, 07.06.2001 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 1992 |
|
RU2092355C1 |

