Изобретение относится к области организации и управления движением на железных дорогах, а именно к системам определения местонахождения, обеспечивающим высокоточное позиционирование рельсовых транспортных средств как самоходных, так и несамоходных, и может быть использовано для точного определения местонахождения рельсовых транспортных средств, в том числе, и для дистанционного определения занимаемого транспортным средством рельсового пути.
Известна (RU, патент 2092355, 1997) система для управления движением поездов с использованием искусственных спутников Земли, содержащая установленные на каждом локомотиве приемники передаваемых с искусственных спутников Земли сигналов, выход каждого из которых связан с входом соответствующего из дальномеров, выходами подключенных к входам блока формирования сигналов местоположения поезда путем решения навигационных уравнений, связанного выходами с входом блока контроля и регулирования скорости движения поезда, входом блока памяти и через цифроаналоговый преобразователь с входом передатчика, выполненного с возможностью передачи сигналов через спутник связи на диспетчерский пункт, на котором установлен блок обработки информации, связанный с дисплеем, кроме того, система снабжена установленным на каждом локомотиве рельсовым локатором, а блок формирования сигналов местоположения поезда выполнен с дополнительным входом, подключенным к выходу рельсового локатора, и каналом формирования сигналов скорости поезда и расстояния до идущего впереди транспортного средства по информации, поступающей с рельсового локатора, для индикации их на локомотивном дисплее.
Недостатком известного устройства следует признать невозможность определения занятого транспортным средством рельсового пути, поскольку точность определения координат с использованием средств космической навигации не превышает 10 м, а расстояние между рельсовыми путями обычно составляет 4-6 м.
Известна (RU, патент 26505, 2001) система навигации железнодорожного транспортного средства, характеризуемая наличием, по меньшей мере, одного идентификатора пути, размещенного на трассе прохождения указанного транспортного средства, расположенного на указанном транспортном средстве средства возбуждения отклика указанного идентификатора пути и средства регистрации отклика указанного идентификатора пути, бортового компьютера, причем указанный бортовой компьютер выполнен с возможностью анализа указанного отклика и передачи информации посредством бортового терминала наземному посту контроля местонахождения транспортного средства. В предпочтительном варианте реализации система содержит более одного идентификатора пути, каждый из которых настроен на генерирование излучения в заданном диапазоне частот. Обычно идентификаторы путей, расположенные по трассе следования железнодорожного транспортного средства, настроены на генерирование излучений, длины волн которых соответствуют заранее заданной зависимости, при этом, предпочтительно, идентификаторы путей, расположенные по трассе следования железнодорожного транспортного средства, настроены на генерирование излучений, длины волн которых монотонно возрастают или убывают. Преимущественно, идентификаторы путей размещены на заданном расстоянии друг от друга, причем расстояние между последовательно установленными идентификаторами путей введено в программу бортового компьютера. Обычно каждый идентификатор путей имеет свой идентификационный номер, введенный в программу бортового компьютера и передаваемый идентификатором на транспортное средство. Система может дополнительно содержать, по меньшей мере, один радиоканал и/или спутник-ретранслятор.
Недостатком известной системы следует признать ее локальный характер, поскольку при использовании ее в масштабах значительного региона информационный сигнал, генерируемый идентификатором, который, как правило, располагается у стрелок, а также на входе и выходе бесстрелочных перегонов, не может не обеспечить точного места нахождения транспортного средства.
Техническая задача, решаемая посредством предлагаемой системы, состоит в обеспечении точного определения местонахождения транспортного средства.
Технический результат, получаемый при реализации предложенной системы, состоит в повышении безопасности эксплуатации железнодорожных транспортных средств.
Для достижения указанного технического результата предложено использовать систему контроля движения железнодорожного транспортного средства, содержащую, по меньшей мере, один идентификатор пути, установленный на трассе прохождения указанного транспортного средства, расположенные на указанном железнодорожном транспортном средстве средство возбуждения сигнала указанного идентификатора пути и средство регистрации сигнала указанного идентификатора пути и бортовое вычислительное средство, выполненное с возможностью анализа указанного отклика, причем бортовое вычислительное средство содержит информацию о профиле железнодорожного пути и выполнено с возможностью передачи информации в диспетчерский пункт, а также с возможностью приема сигнала, характеризующего самочувствие машиниста, и передачи управляющих сигналов на силовую и тормозную систему транспортного средства, а также бортовое вычислительное средство выполнено с возможностью подключения к системе контроля состояния транспортного средства и/или с возможностью подключения к системе противопожарной безопасности. Профиль железнодорожного пути может быть задан в виде трехмерной карты или в виде математической зависимости. Как указывалось ранее, система может дополнительно содержать видеокамеру, установленную с возможностью обзора кабины транспортного средства и подключенную к бортовому вычислительному средству. Система контроля состояния транспортного средства может быть расположена как на транспортном средстве, так и диспетчерском пункте. Для уточнения местонахождения транспортного средства желательно использовать более одного идентификатора пути, каждый из которых настроен на генерирование излучения в заданном диапазоне частот. Для упрощения определения предпочтительно, чтобы идентификаторы путей, расположенные по трассе следования железнодорожного транспортного средства, были настроены на генерирование излучений, длины волн которых соответствуют заранее заданной зависимости. Для облегчения установления местонахождения железнодорожного транспортного средства (в частности, определения занимаемого железнодорожного пути) предпочтительно, чтобы каждый идентификатор пути имел свой идентификационный номер, введенный в программу бортового вычислительного средства и передаваемый идентификатором на транспортное средство. Это позволяет однозначно (и дистанционно) определить занятый транспортным средством железнодорожный путь. Для обнаружения железнодорожного транспортного средства на перегоне, в том случае, когда занятый рельсовый путь однозначно определен, на транспортном средстве желательно дополнительно иметь устройство спутниковой навигации, которое автоматически, после решения навигационных задач по определению местонахождения транспортного средства, сообщает точку нахождения железнодорожного транспортного средства и машинисту, и диспетчерскому пункту.
Применение в предлагаемой системе одновременно идентификаторов, информация от которых поступает как в бортовое вычислительное средство, размещенное в кабине транспортного средства, так и в диспетчерский пункт, и введение в память бортовых вычислительных средств, находящихся в кабине локомотива и на диспетчерском пункте, сведений о местонахождении индикаторов и рельефе местности позволяет одновременно решить несколько задач контроля местонахождения и перемещения железнодорожных транспортных средств.
Во-первых, поступающая в диспетчерский пункт информация о прохождении последовательности идентификаторов позволяет не только определить занимаемый железнодорожным транспортным средством рельсовый путь, но и рассчитывать скорость транспортного средства, поскольку расстояние между идентификаторами известно, а время между откликами (время прохождения от одного идентификатора до следующего) легко определить. Во-вторых, зная о массе железнодорожного транспортного средства, а также о профиле рельсового пути с учетом знания скорости (и инерции) транспортного средства можно выработать закономерности движения транспортного средства, позволяющие выработать рекомендации машинисту. В-третьих, если движение транспортного средства (по итогам прохождения идентификаторов) не соответствует ранее выявленным закономерностям, то можно предположить неисправность транспортного средства, а также злой умысел или заболевание машиниста. Поскольку система диагностики состояния транспортного средства подключена к бортовому вычислительному средству, размещенному в кабине машиниста и связанному по радиоканалу с вычислительным устройством диспетчерского пункта, то легко определить - имеет ли срыв закономерности движения техническую или другую природу. При установке видеокамеры в кабине машиниста диспетчер способен определить состояние машиниста или наличие в кабине посторонних лиц и дистанционно дать указание бортовому вычислительному средству, расположенному в кабине транспортного средства, взять управление движением на себя и привести транспортное средство на ближайший разъезд.
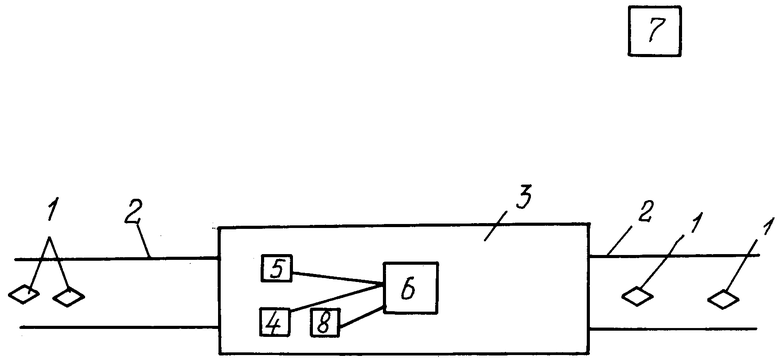
На чертеже приведена блок-схема базового варианта предлагаемой системы, при этом использованы следующие обозначения: множество идентификаторов 1 пути, трасса 2 прохождения транспортного средства 3, средство 4 возбуждения сигнала идентификатора 1, средство 5 регистрации сигнала идентификатора 1, бортовое вычислительное средство 6, вычислительное средство 7 диспетчерского пункта, средство 8, характеризующего самочувствие машиниста.
В дальнейшем возможности предлагаемой системы будут рассмотрены на примерах ее реализации.
На узловой станции, снабженной системой автоматических стрелок, на железнодорожных путях 2 по каждому направлению железнодорожных путей установлено не менее трех идентификаторов 1 пути по тупиковым путям и не менее шести идентификаторов 1 на магистральных путях, причем каждый идентификатор способен генерировать излучение в жестко заданном диапазоне частот. При этом по каждому направлению от центра станции частота генерируемого сигнала возрастает. Указанные идентификаторы заделаны в шпалы примерно на равном расстоянии между рельсами. На средстве тяги транспортного средства 3 установлены средство 4 возбуждения отклика идентификаторов 1 и средство 5 регистрации указанных откликов. Также на средстве тяги установлено бортовое вычислительное средство 6, к которому подключены средства 4 и 5, датчики 8, характеризующие самочувствие машиниста, а также управляющие входы силовой системы средства тяги и тормозной системы. Одновременно бортовое вычислительное средство 6 по радиоканалу сообщено с вычислительным средством 7 диспетчерского пункта. В память вычислительных средств 6 и 7 введены трехмерные карты региона узловой станции (т.е. участки всех тупиковых железнодорожных путей, а также участки железнодорожных путей до соседних узловых станций). Кроме того, в память вычислительных средств 6 и 7 введена информация о длинах волн излучения каждого идентификатора из множества, принадлежащего региону этой узловой станции. Изменение вышеперечисленных сведений возможно только по команде организации, отвечающей за управление движением в данном регионе железнодорожной сети.
В том случае, если транспортное средство 3 (маневровый тепловоз) переформировывает железнодорожный состав на территории узловой станции, по меньшей мере, часть ранее прибывших на узловую станцию железнодорожных составов временно поступает на тупиковые железнодорожные пути. Поскольку в память вычислительных средств 6 и 7 введены все идентификаторы 1, расположенные по региону узловой станции (на трехмерной карте), а также характеристики их генерируемых излучений, одновременно из кабины маневрового тепловоза, на котором установлены средство 4 возбуждения и средство 5 регистрации отклика идентификаторов, и с диспетчерского пункта осуществляют контроль заполнения тупиковых железнодорожных путей, не допуская их переполнения и обусловленной этим аварии. Кроме того, при вынужденном пересечении маневровым тепловозом, осуществляющим формирование железнодорожного состава, магистральных путей или области работы второго маневрового тепловоза сигналы соответствующих идентификаторов позволят избежать столкновения.
При выходе транспортного средства (железнодорожного состава) с территории узловой станции установленные на железнодорожных путях идентификаторы 1 под действием средства 4, установленного на локомотиве, будут генерировать частотные сигналы, регистрируемые установленным на том же локомотиве средством 5. Бортовое вычислительное средство 6, сравнив зарегистрированные сигналы с трехмерной картой, внесенной в ее память, определяет занимаемый рельсовый путь и передает по радиоканалу информацию вычислительному средству 7 диспетчерского пункта. По ходу движения транспортного средства сигналы идентификаторов расположенных вдоль железнодорожного пути позволяют контролировать диспетчерскому пункту, вычислительное устройство которого получает по радиоканалу информацию от вычислительного устройства локомотива железнодорожного состава, характеристики движения железнодорожного состава, а также состояние железнодорожного состава и машиниста.
В том случае, если получаемые характеристики не соответствуют характеристикам, ранее рассчитанным на основании известности массы железнодорожного состава, силовых характеристик локомотива и профиля железнодорожного пути, вычислительное средство диспетчерского пункта может обратить внимание диспетчера на указанное несоответствие или принять самостоятельное решение о неготовности машиниста к исправлению ситуации и передаче вычислительному средству локомотива сигнала о необходимости самостоятельного управления силовыми и тормозными устройствами локомотива для приведения железнодорожного состава на ближайший полустанок.
Использование предлагаемой системы позволяет повысить безопасность эксплуатации железнодорожных транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОНАХОЖДЕНИЯ НЕСАМОХОДНОГО РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2007 |
|
RU2373094C2 |
| НАВИГАЦИОННАЯ СИСТЕМА ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2280579C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2008 |
|
RU2373095C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОПЕРАТИВНОЙ ОБСТАНОВКОЙ НА ЖЕЛЕЗНОЙ ДОРОГЕ, АВТОМАТИЗИРОВАННАЯ СИСТЕМА СЛЕЖЕНИЯ ЗА ОПЕРАТИВНОЙ ОБСТАНОВКОЙ НА ЖЕЛЕЗНОЙ ДОРОГЕ И СИСТЕМА ПЕРЕДАЧИ И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ СЛЕЖЕНИЯ НА ЖЕЛЕЗНОЙ ДОРОГЕ | 2005 |
|
RU2294298C1 |
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ, МЕСТОНАХОЖДЕНИЯ И СВЯЗИ ПАССАЖИРСКОГО ПОЕЗДА | 2009 |
|
RU2419980C2 |
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ И СВЯЗИ ПАССАЖИРСКОГО ПОЕЗДА | 2006 |
|
RU2329177C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2005 |
|
RU2313465C2 |
| СИСТЕМА ДЛЯ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2008 |
|
RU2390456C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2492090C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ ШКОЛЬНОГО АВТОБУСА | 2008 |
|
RU2364942C1 |
Изобретение относится к управлению движением на железных дорогах, а именно к системам определения местонахождения рельсовых транспортных средств. Система содержит, по меньшей мере, один идентификатор пути, установленный на трассе прохождения указанного транспортного средства, расположенные на указанном железнодорожном транспортном средстве средство возбуждения сигнала указанного идентификатора пути и средство регистрации сигнала указанного идентификатора пути и бортовое вычислительное средство, выполненное с возможностью анализа указанного отклика. Бортовое вычислительное средство содержит информацию о профиле железнодорожного пути и выполнено с возможностью передачи информации в диспетчерский пункт, а также с возможностью приема сигнала, характеризующего самочувствие машиниста, и передачи управляющих сигналов на силовую и тормозную систему транспортного средства. Кроме того, бортовое вычислительное средство выполнено с возможностью подключения к системе контроля состояния транспортного средства и/или с возможностью подключения к системе противопожарной безопасности. Техническим результатом изобретения является повышение безопасности эксплуатации железнодорожных транспортных средств. 7 з.п. ф-лы, 1 ил.