Изобретение относится к устройствам железнодорожной автоматики, телемеханики и связи.
Известно устройство для управления движением поездов с помощью искусственных спутников Земли, содержащее установленные на каждом локомотиве приемники передаваемых с искусственных спутников Земли сигналов, выход каждого из которых связан с входом соответствующего из дальномеров, выходами подключенных к входам блока формирования сигналов местоположения поезда путем решения навигационных уравнений, связанного выходами с входом блока контроля и регулирования скорости движения поезда, входом блока памяти и через цифроаналоговый преобразователь с входом передатчика, выполненного с возможностью передачи сигналов через спутник связи на диспетчерский пункт, на котором установлен блок обработки информации, связанный с дисплеем.
Однако устройство имеет следующие недостатки.
1. Сложность системы введения поправок в навигационные измерения для реализации указанной выше точности. Эти поправки определяются большим количеством наземных измерительных пунктов, передаются на навигационные спутники, записываются в их бортовую память, далее передаются пользователю, на борту которого должны быть специальные дешифраторы для выделения указанных поправок с последующим введением их в ЭВМ, решающей навигационную задачу.
2. Поскольку у машиниста отсутствует информация о расстоянии до идущего впереди поезда и о его скорости, весь объем навигационной информации с каждого локомотива передается по линиям спутниковой связи на диспетчерский пункт, где обрабатывается для выработки команд управления движением с последующей передачей их на локомотивы. Это требует использования широкополосных высокоинформативных сигналов в каналах спутниковой связи и мощной ЭВМ на диспетчерском пункте, способной обрабатывать большие объемы информации.
3. Несмотря на относительно высокие стоимость и сложность аппаратуры (один комплект локомотивного оборудования стоит 100 тыс. долларов), точность и разрешающая способность навигационных измерений недостаточны для существенного повышения пропускной способности железных прицельного торможения поездов, различения поездов, движущихся по соседним путям. Техническим результатом, на достижение которого направлено данное изобретение, является устранение отмеченных недостатков путем организации двух каналов, поступления информации разделив функции диспетчерского контроля и обеспечения безопасности движения.
Диспетчерский контроль целесообразно возложить на систему космической навигации, снизив требуемую точность измерения координат поездов до 1 км, т. е. используя эту шкалу как грубую. При этом из локомотивной аппаратуры пользователя исключаются дешифраторы поправок, обеспечивающие высокую точность, снижается разрядность всех кодовых посылок, а полоса пропускания каналов космической связи может быть на несколько порядков уменьшена и доведена до телефонного стандарта.
Для обеспечения безопасности движения целесообразно использовать системы определения местоположения и скорости рельсового транспортного средства, представляющие собой простые и дешевые рельсовые (фидерные) локаторы, измеряющие расстояние вдоль криволинейного в общем случае пути до впереди идущего поезда, а также его скорость с точностью порядка 1 м и 1 м/с соответственно.
Эту информацию машинист будет непрерывно иметь на соответствующем табло или дисплее. Такое устройство может служить дополнением к существующей системе АЛС для повышения надежности управления движением.
Технический результат достигается тем, что устройство для управления движением поездов с помощью искусственных спутников Земли, содержащее установленные на каждом локомотиве приемники передаваемых с искусственных спутников Земли сигналов, выход каждого из которых связан с входом соответствующего из дальномеров, выходами подключенных к входам блока формирования сигналов местоположения поезда путем решения навигационных уравнений, связанного выходами с входом блока контроля и регулирования скорости движения поезда, входом блока памяти и через цифроаналоговый преобразователь с входом передатчика, выполненного с возможностью передачи сигналов через спутник связи на диспетчерский пункт, на котором установлен блок обработки информации, связанный с дисплеем, снабжено установленным на каждом локомотиве рельсовым локатором, а блок формирования сигналов местоположения поезда выполнен с дополнительным входом, подключенным к выходу рельсового локатора, и каналом формирования сигналов скорости поезда и расстояния до идущего впереди транспортного средства по информации, поступающей с рельсового локатора, для индикации их на локомотивном дисплее.
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - структурная схема блока формирования сигналов местоположения поезда, где 1.1-1.3 навигационные искусственные спутники Земли; 2 локомотив; 3.1-3.3 - приемники; 4.1-4.4 дальномеры; 5 блок формирования сигналов местоположения поезда; 6 блок памяти; 7 рельсовый локатор; 8 блок контроля и регулирования скорости поезда; 9 локомотивный дисплей; 10 цифроаналоговый преобразователь; 11 локомотивная радиостанция с передатчиком; 12 спутник связи; 13 диспетчерский пункт; 14 блок обработки информации;15 - радиостанция диспетчерского пункта; 16 дисплей диспетчерского пункта.
Устройство работает следующим образом.
Спутники 11-1.3 передают опорные сигналы и сигналы о своих эфемеридах, которые принимаются локомотивными приемниками 3.1-3.3. Последние выдают опорные сигналы на дальномеры для измерения расстояний 4.1-4.3 от локомотива до навигационных спутников. Эта информация, также данные об эфемеридах вводятся в блок 5 и блок памяти 6, где предварительно записывается программа решения навигационных уравнений.
Эта задача решается в блоке 5. Рассчитанные таким образом координаты и составляющие векторы скорости поезда подаются на цифроаналоговый преобразователь 10, представляя собой информацию для передачи через передатчик локомотивной радиостанции 11 спутник связи 12 и радиостанцию 15, диспетчерского пункта 13 на его блок 14 обработки информации, куда таким же образом передается информация со всех локомотивов. В результате ее обработки вырабатываются команды управления движением, которые по обратным каналам спутниковой связи передаются на локомотивы. Таким образом реализуется грубая шкала для диспетчерского контроля.
Точное измерение относительного расстояния и относительной скорости поездов производится рельсовым локатором 7 также с помощью блока 5, где осуществляется операция дифференцирования относительного расстояния. Результаты относительных измерений по точной шкале поступают в блок 8 для контроля и регулирования скорости транспортного средства.
На дисплее 9 локомотива отображаются команды управления и точная шкала данного локомотива, а на дисплее диспетчерского пункта навигационная информация по грубым шкалам, поступающая от всех локомотивов.
Спутниковые навигационные системы предназначены для определения координат и скоростей любых транспортных средств и строятся таким образом, чтобы в каждой точке Земного шара наблюдалось минимум 3-4 ИСЗ. Эти навигационные спутники излучают опорные сигналы, принимаемые приемниками, расположенными на транспортном средстве. На последнем размещаются также дальномеры, измеряющие расстояния до спутников di, где i 1, 2, 3 номер ИСЗ, а также блок формирования сигналов местоположения поезда и блок памяти, с помощью которых решается навигационная задача вычисления координат и скоростей пользователя в геодезической системе координат  путем определения корней системы уравнений
путем определения корней системы уравнений
(x-xi)2+(y-yi)2+(z-zi)2d
где xi, yi, zi,  - координаты и скорости (составляющие ее вектора) навигационных спутников (эфемериды). Они передаются пользователю вместе с опорным сигналом.
- координаты и скорости (составляющие ее вектора) навигационных спутников (эфемериды). Они передаются пользователю вместе с опорным сигналом.
Для реализации навигационных измерений с точностью 45 м и 1,6 км/ч в полученные данные нужно вводить поправки на нестабильность частоты опорных сигналов, которые также передаются пользователю и выделяются с помощью специальных дешифраторов на его борту.
Спутниковая система связи состоит из нескольких ИСЗ с бортовыми ретрансляторами и предназначена для обеспечения дуплексной связи блока 5 формирования сигналов местоположения поезда.
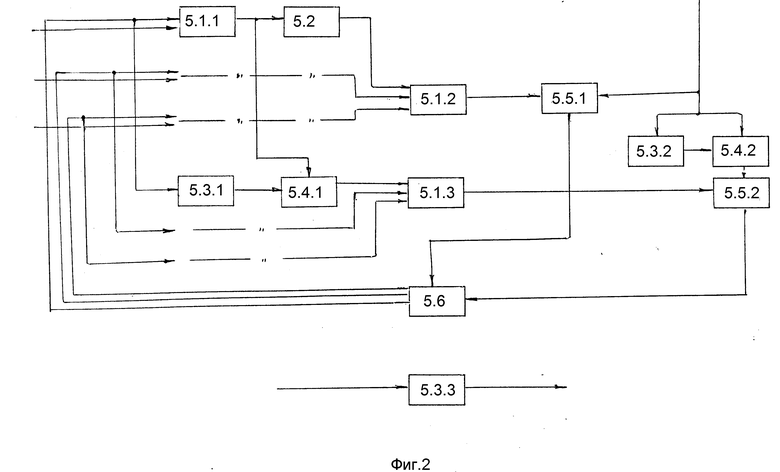
Далее необходимо раскрыть структуру, в которой производится решение системы. Эта структура представлена на фиг. 2. В ее состав входят следующие элементы: 5.1.1-5.1.2 алгебраические сумматоры; 5.2 квадратор; 5.3.1-5.3.3 дифференциаторы; 5.4.1-5.4.2 умножители; 5.5.1-5.5.2 компараторы; 5.6 - узел решения систем уравнений.
Схема на фиг. 2 функционирует следующим образом.
Из приемников 3.3-3.3 фиг. 1 поступают эфемериды навигационных спутников xi, yi, zi,  , дальномеры выдают измеренные значения дальности di. Узел решения систем уравнений 5.6 выдает решения указанных систем уравнений xi, yi, zi,
, дальномеры выдают измеренные значения дальности di. Узел решения систем уравнений 5.6 выдает решения указанных систем уравнений xi, yi, zi,  методом итераций (для чего команды поступают из блока памяти).
методом итераций (для чего команды поступают из блока памяти).
Алгебраические сумматоры (показан один сумматор 5.1.1) определяют разности  z zi, квадраторы (здесь и далее на фиг. 2 два других идентичных канала показаны штрих-пунктиром) возводят эти разности в квадрат, дифференциаторы вычисляют производные
z zi, квадраторы (здесь и далее на фиг. 2 два других идентичных канала показаны штрих-пунктиром) возводят эти разности в квадрат, дифференциаторы вычисляют производные  а умножители выдают произведения
а умножители выдают произведения 
Другие алгебраические сумматоры 5.1.2 и 5.1.3 определяют суммы, стоящие в левых частях уравнений (1) и (2). Компараторы (разновидность алгебраических сумматоров) приравнивают левые и правые части этих уравнений, причем для получения правой части уравнения (2), т.е. di, di, используются соответствующие дифференциатор и умножитель. Результаты решения уравнений вводятся в блок памяти, где хранятся до востребования промежуточные и конечные результаты расчетов.
Дополнительный дифференциатор 5.3.3 вычисляет разность скоростей поездов ΔV путем дифференцирования текущего расстояния между локомотивом и хвостовым вагоном впереди идущего поезда вдоль криволинейного в общем случае железнодорожного пути. Эта информация снижается с выхода измерителя рельсового локатора 7.
Установленные на каждом локомотиве (см. фиг. 1) три приемника 3.1-3.3 навигационных сигналов ИСЗ 1.1-1.3 нагружены соответственно на три дальномера 4.1-4.3, приемники и дальномеры выходами соединены с блоком с (5), который выходами соединен с блоком 6 памяти, блоком 8 для контроля и регулирования скорости транспортного средства, дисплеем 9 и цифроаналоговым преобразователем 10, к одному из входов блока 5 подключен рельсовый локатор 7. Аналого-цифровой преобразователь 10 с помощью радиостанций 11 и 15 и спутника связи 12 связан с блоком обработки информации 14 диспетчерского пункта, который в свою очередь нагружен на дисплей 16.
Супергетеродинные приемники 3.1-3.3 работают в диапазоне единиц гигагерц. Дальномеры 4.1-4.3 корреляционного типа, поскольку в системе используются шумоподобные сигналы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 2005 |
|
RU2305044C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 2010 |
|
RU2454348C2 |
| НАВИГАЦИОННАЯ СИСТЕМА ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2280579C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1996 |
|
RU2108252C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2284938C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ И СКОРОСТЕЙ ОБЪЕКТОВ С ПОМОЩЬЮ ОДНОГО ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ И ЛОКАТОРА | 2005 |
|
RU2307371C2 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА ИЛИ ЛОКОМОТИВА С ПРИБЫВАЮЩИМ ИЛИ ОТПРАВЛЯЮЩИМСЯ СО СТАНЦИИ ПОЕЗДОМ | 2004 |
|
RU2288856C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714966C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА БАЗЕ РАДИОКАНАЛА | 2014 |
|
RU2556133C1 |
| Способ и система децентрализованного интервального регулирования движения поездов | 2017 |
|
RU2664023C1 |
Использование: в области управления движением поездов на магистральном железнодорожном транспорте. Задача, решаемая изобретением,- упрощение и существенное удешевление аппаратуры железнодорожной космической системы управления движением поездов при повышении пропускной способности ж.д. перегонов, повышении уровня безопасности движения и разгрузке каналов спутниковой связи. Указанная задача решается путем установки на локомотивы рельсовых локаторов, что позволяет значительно повысить точность определения координат поездов и снизить требования по точности к системе космической навигации путем двушкального построения устройства управления движением поездов, где функция "грубой" шкалы для диспетчерского контроля выполняет система космической навигации, а функция "точной" шкалы для безопасного движения - рельсовый локатор. 2 ил.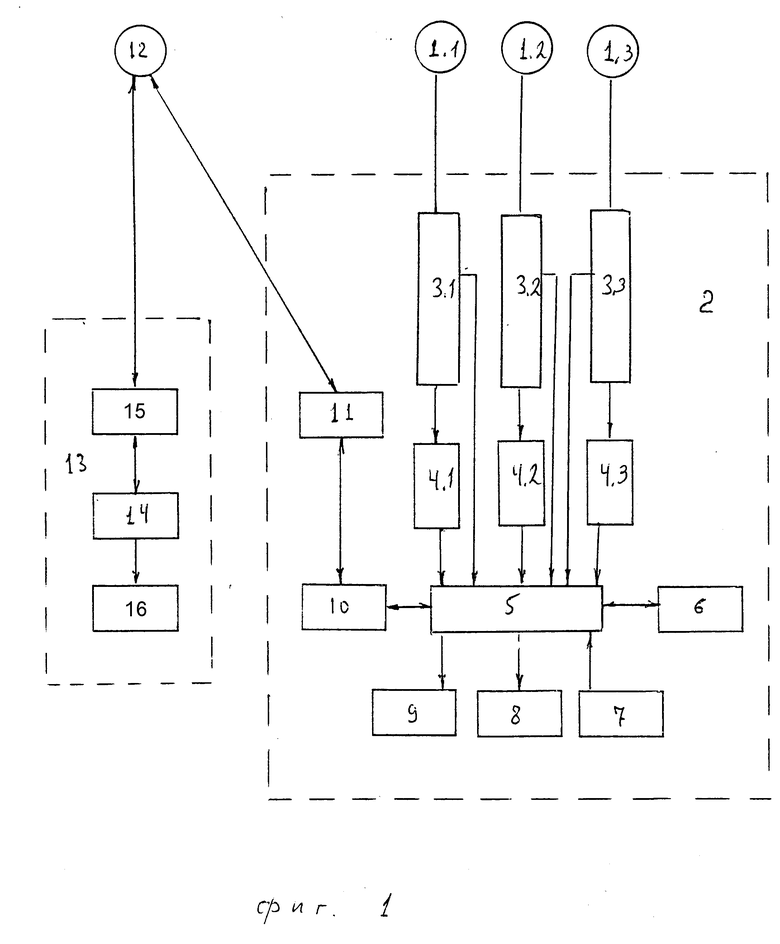
Устройство для управления движением поездов с помощью искусственных спутников Земли, содержащее установленные на каждом локомотиве приемники передаваемых с искусственных спутников Земли сигналов, выход каждого из которых связан с входом соответствующего из дальномеров, выходами подключенных к входам блока формирования сигналов местоположения поезда путем решения навигационных уравнений, связанного выходами с входом блока контроля и регулирования скорости движения поезда, входом блока памяти и через цифроаналоговый преобразователь с входом передатчика, выполненного с возможностью передачи сигналов через спутник связи на диспетчерский пункт, на котором установлен блок обработки информации, связанный с дисплеем, отличающееся тем, что оно снабжено установленным на каждом локомотиве рельсовым локатором, а блок формирования сигналов местоположения поезда выполнен с дополнительным входом, подключенным к выходу рельсового локатора, и каналом формирования сигналов скорости поезда и расстояния до идущего впереди транспортного средства по информации, поступающей с рельсового локатора, для индикации их на локомотивном дисплее.
| Modern Railroads, 1988, N 16, с | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
