Группа изобретений относится к области транспорта и может быть использована при строительстве сооружений для хранения, загрузки-выгрузки автомобилей в многоэтажных парковочных стоянках-гаражах, а также в складских помещениях для габаритных изделий и устройств.
Известен способ перемещения автомобилей в многоэтажных многоячеечных стоянках под действием скатывающей силы от собственного веса автомобиля, включающий регулирование относительно горизонта углов наклона платформ ячейки хранения и подъемного устройства таким образом, чтобы создалась единая наклонная поверхность со скатом в необходимую сторону (патент РФ 2302500, кл. E04H 6/18, 2005).
К недостаткам указанного способа следует отнести сложность его реализации из-за нелинейной зависимости потребного для трогания с места угла наклона платформ от коэффициента трения колес скатывающегося автомобиля, что при реализации в устройстве вызывает ненадежность при работе.
Наиболее близким по совокупности признаков к заявляемому способу в группе изобретений является способ того же назначения, предусматривающий вертикальное перемещение поддона с автомобилем с помощью регулируемых синхронных цепных передач и горизонтальное перемещение с помощью механизма, обеспечивающего плоскопараллельное возвратно-поступательное движение поддона в ячейку хранения и обратно (Заявка на изобретение РФ №2003106057/03 A, E04H 6/18, 2003).
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, принятого за прототип, относятся сложность его кинематической схемы и возможность реализации только однорядного с каждой от лифтового подъемника стороны варианта размещения ячеек хранения автомобилей.
Наиболее близким устройством того же назначения к заявляемому устройству в группе изобретений по совокупности признаков является механизированный многоуровневый гараж для осуществления вышеназванного способа, принятый за прототип, имеющий по оси симметрии вертикальную шахту подъемника с грузовой платформой и расположенные по обе стороны от нее ячейки хранения с поддонами для размещения автомобилей, которые установлены на ложементах, а также механизм горизонтального перемещения поддонов, смонтированный на грузовой платформе. Особенностью устройства является перемещение грузовой платформы по направляющим поверхностям вертикальными цепными передачами, снабженными синхронизирующим их перемещения регулируемым приводом, соединенным с узлами грузовой платформы, механизм горизонтального перемещения снабжен подвижной частью для размещения на ней поддонов для осуществления принудительных плоскопараллельных возвратно-поступательных перемещений в направлении ячеек хранения автомобилей (заявка на изобретение РФ №2003106057/03 А, E04H 6/18, 2003).
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, принятого за прототип, является необходимость достаточно сложной регулировки синхронного привода цепных передач, что приводит к снижению надежности в работе устройства в процессе эксплуатации.
Задачей указанной группы изобретений является устранение вышеперечисленных недостатков путем реализации нового способа и устройства для полностью автоматизированной загрузки-выгрузки автомобилей в многоэтажных парковочных стоянках-гаражах.
Поставленная задача решается за счет достижения технического результата при осуществлении заявляемой группы изобретений, заключающегося в получении способа парковки, позволяющего в устройстве реализовать многовариантные решения конструкций автостоянок-гаражей с достаточно высокой производительностью загрузки-выгрузки, простых в изготовлении, не требующих какой-либо регулировки в процессе эксплуатации, с оптимальным для каждого варианта соотношением между техническими, экономическими и эксплуатационными показателями.
Указанный технический результат по осуществлению группы изобретений по объекту-способу достигается известным способом перемещения загруженного на платформу автомобиля в вертикальной и горизонтальной плоскостях.
Предлагаемый способ имеет следующие отличительные особенности. Расположение боксов для хранения автомобилей производят по одному из вариантов - в один или более рядов вокруг лифтового пролета с каждой стороны, а горизонтальное перемещение платформ осуществляют по направляющим поверхностям колесным автоматическим тягачом с электроприводом и устройством электромагнитной сцепки с платформой. Вертикальное перемещение платформ производят при использовании одно- или многоячеечной лифтовой клети с количеством в один или более ярусов. В случае необходимости извлечения платформы из крайнего по отношению к лифтовому пролету ряда производят последовательно следующие операции - тягачом извлекают в клеть на первый ярус платформу из ближнего первого ряда, далее клеть перемещают на второй ярус и извлекают платформу из второго ряда, таким образом извлекают и искомую платформу, затем ее доставляют на загрузочно-разгрузочный этаж, расположенный на открытой на улицу наземной площадке. В случае разгрузки клиент садится в автомобиль и выезжает с платформы на улицу. В случае загрузки клиент въезжает на платформу, ставит автомобиль на ручной тормоз и выходит из него. Далее процесс доставки автомобиля и платформ происходит без его участия, а последовательность размещения и перемещения платформ производит компьютер или микропроцессор по наиболее оптимальному варианту.
Указанный технический результат достигается также тем, что клиент осуществляет парковку или возврат автомобиля с помощью электронной карты на терминале, а продляет или сокращает парковку дистанционно - по средствам связи или интернету.
Указанный единый технический результат при осуществлении группы изобретений по объекту-устройству достигается тем, что известный механизированный многоуровневый гараж содержит лифтовый подъемник с грузовой платформой и расположенные по обе стороны от него ячейки хранения автомобилей.
Особенность заявляемого устройства заключается в том, что боксы располагают по одному из вариантов - в один или более рядов вокруг лифтового пролета с каждой стороны. Также по одному из вариантов изготавливают одно- или многоместные лифтовые клети - с одним или более ярусов, расположенных друг над другом. На каждом ярусе лифтовой клети располагают по одной или более параллельных друг другу ячеек с одной парой направляющих поверхностей и контактной шиной в каждой из них. Лифтовую клеть изготавливают по одному из трех вариантов исполнения - или в виде передвижного портала, перемещающегося по рельсам вдоль пролета с помощью электропривода и поочередно обслуживающего две или более секции, или в виде стационарного неподвижного подъемника, обеспечивающего работу одной секции каждой ячейкой, или комбинацию тех и других видов клетей. На направляющих поверхностях каждой ячейки клети устанавливают автоматический колесный тягач с электроприводом, который перемещает платформы в боксы и обратно в ячейку лифтовой клети. Направляющие поверхности боксов одновременно являются балками-перекрытиями силового каркаса здания стоянки-гаража. На направляющих поверхностях ячеек лифтовых клетей и боксов устанавливают на внутренних или внешних сторонах продольные перегородки, ограничивающие поперечное смещение колес тягача и роликов платформы. На колесном тягаче размещают устройство, производящее изменение полярности питающего напряжения и включение двух электромагнитов сцепки с подвижной платформой. Электромагниты монтируют на раме тягача спереди и сзади по ходу движения. Загрузку-выгрузку автомобилей производят на одном из этажей здания, расположенном на открытой на улицу наземной площадке. В каждой секции площадки устанавливают оптический датчик, подающий сигнал на пульт управления о снятии блокировки при выходе клиента из секции после окончания им парковки автомобиля на подвижную платформу. Процесс управления перемещением и размещением платформ осуществляют с пульта управления подачей команд управления и питающих напряжений по контактным шинам и проводам на боксы, лифтовые клети, тягачи и секции загрузочно-разгрузочной площадки через компьютер или микропроцессор.
Указанный технический результат достигается также тем, что здание или комплекс зданий парковочной стоянки гаража выполняют каркасного типа без межэтажных перекрытий и по одному из вариантов - наземному, подземному или комбинированному наземно-подземному. Межэтажные перекрытия облегченного типа выполняют только по периметру здания для обеспечения доступа обслуживающего персонала к устройствам системы автоматики.
Достижение указанного технического результата осуществляется также за счет установки неподвижных ограничительных башмаков на балках каркаса здания в боксах перед подвижными платформами в крайних от лифтового пролета рядах. В остальных рядах устанавливают управляемые с пульта управления башмаки, оба вида башмаков предназначены для фиксации платформ после их въезда в бокс, в одной плоскости с ними также устанавливают контактные датчики, подающие сигнал на пульт управления в момент встречи платформы с башмаком. В этой же плоскости закрепляют и демпферы, предназначенные для уменьшения перегрузки в этот момент.
Указанный технический результат достигается также тем, что лифтовые клети снабжают фиксаторами, электрически соединенными с пультом управления, которые позволяют совместить в одну плоскость направляющие поверхности, контактные шины лифтовой клети и рядов боксов после остановки лифтовой клети на заданном этаже. На направляющие поверхности каждой ячейки лифтовой клети устанавливают два управляемых с пульта управления башмака, которые предотвращают продольное перемещение тягачей и платформ после их въезда в ячейку клети, в одной плоскости с ними закрепляют два контактных датчика, подающих сигнал на пульт управления в момент встречи платформы или тягача с башмаком, и демпферы - для уменьшения перегрузки в этот момент. Кроме того, лифтовые клети снабжают счетчиками номера этажа, а портальные клети дополнительно - счетчиками номера секции.
Достижение указанного технического результата осуществляется также тем, что на подвижной платформе устанавливают ряды полых роликов, свободно обкатывающихся вокруг оси меньшего диаметра. На раме в передней по ходу движения части крепят площадку из магнитного материала для сцепки с электромагнитом тягача и неподвижную перегородку. На раме в задней части располагают блокировочную подвижную перегородку, обе перегородки ограничивают перемещение автомобиля вдоль платформы. Подвижную перегородку выполняют в виде подпружиненной стойки, автоматически убирающейся при проталкивании тягачом платформы на загрузочно-разгрузочную площадку.
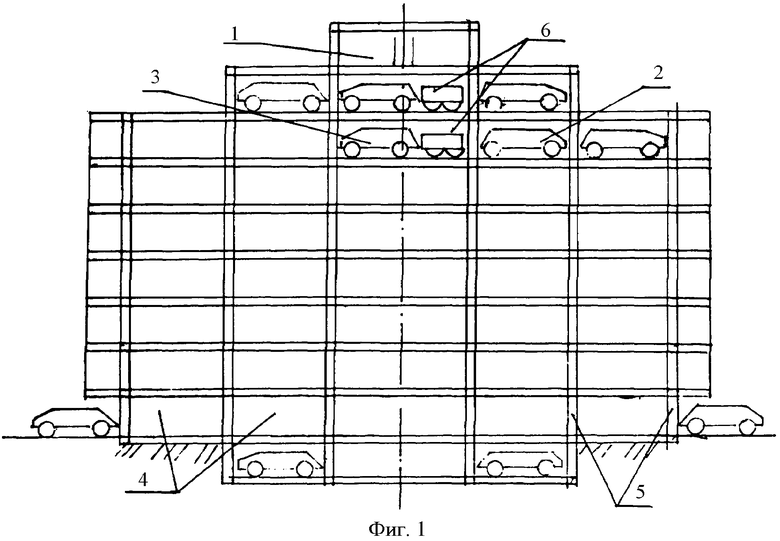
На фиг.1 изображено сечение многоэтажной двухрядной шестисекционной парковочной стоянки-гаража с продольным расположением подвижных платформ в фронтальной плоскости.
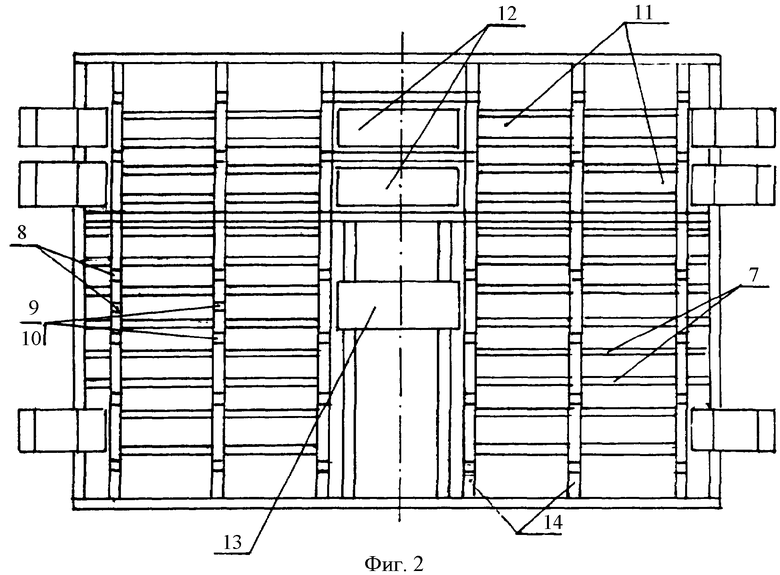
На фиг.2 изображено сечение указанной стоянки в горизонтальной плоскости.
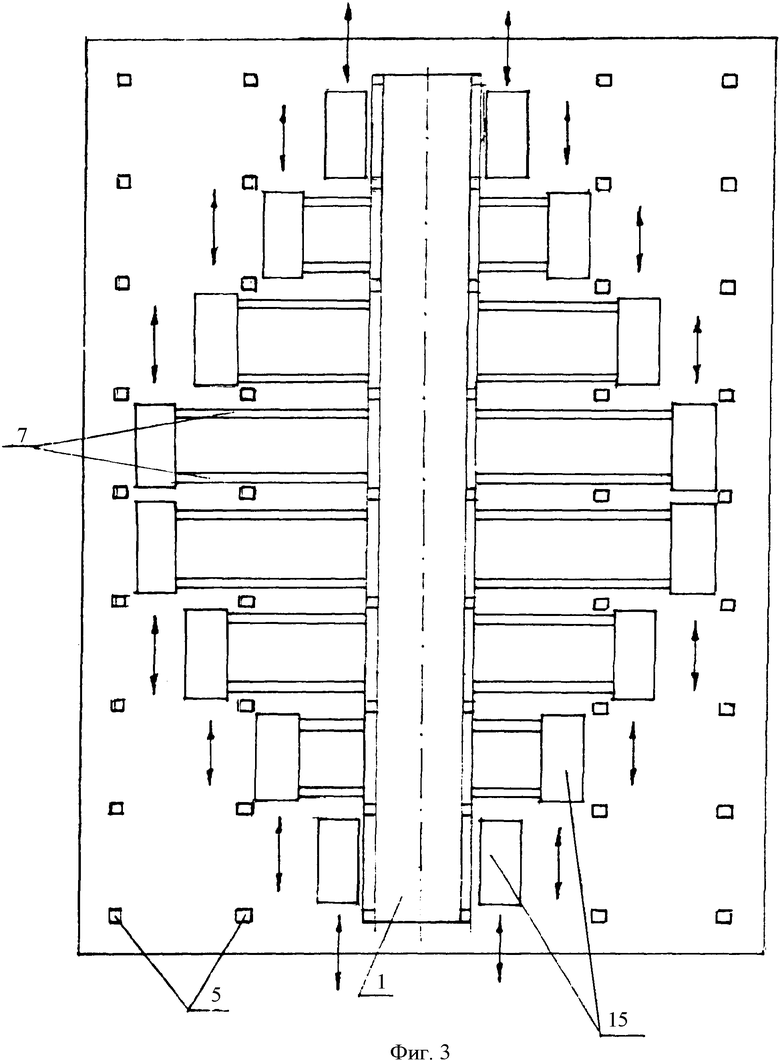
На фиг.3 изображена в горизонтальной проекции наземная площадка четырехрядной восьмисекционной парковочной стоянки-гаража с поперечным расположением подвижных платформ, стрелками показаны направления движения автомобилей при их загрузке-выгрузке.
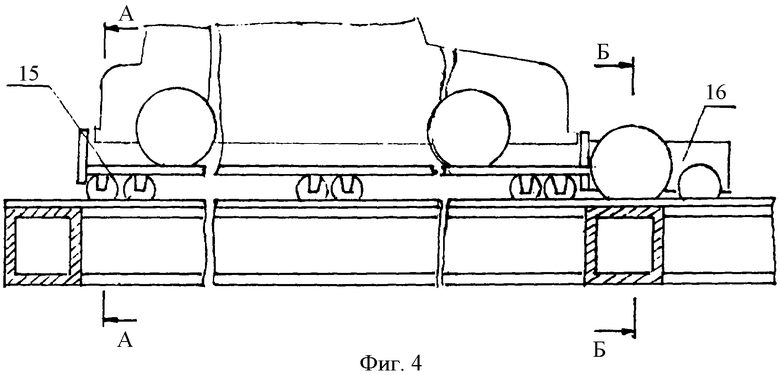
На фиг.4 изображены в профильной проекции передвижная платформа с загруженным на нее автомобилем и сцепленный с ней автоматический колесный тягач.
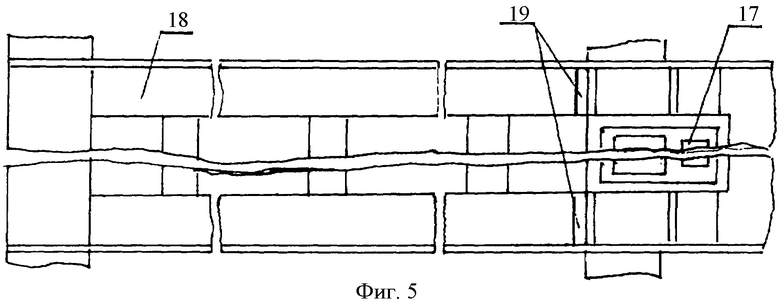
На фиг.5 изображены в горизонтальной проекции передвижная платформа и сцепленный с ней автоматический колесный тягач.
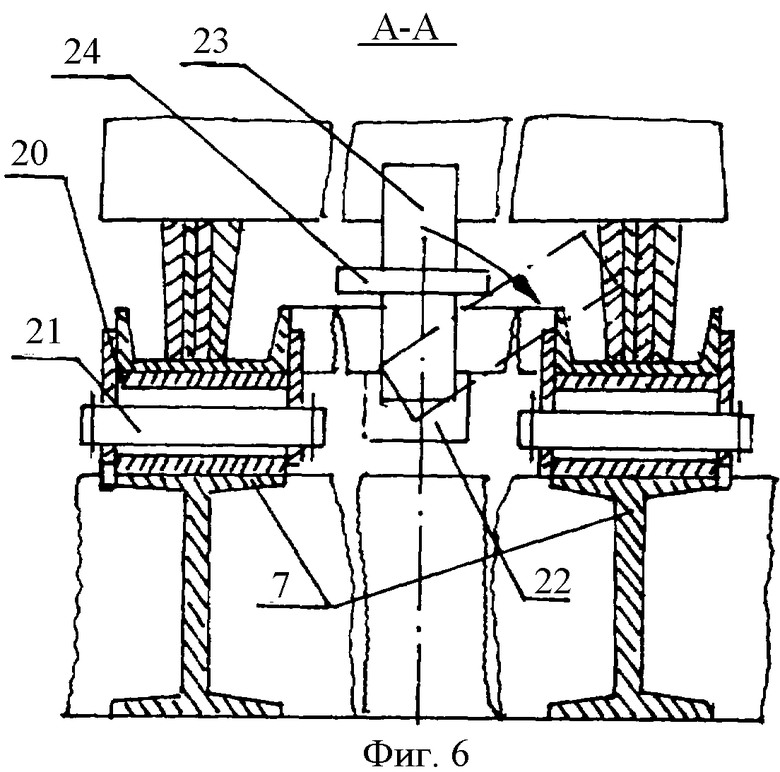
На фиг.6 показан разрез передвижной платформы с автомобилем.
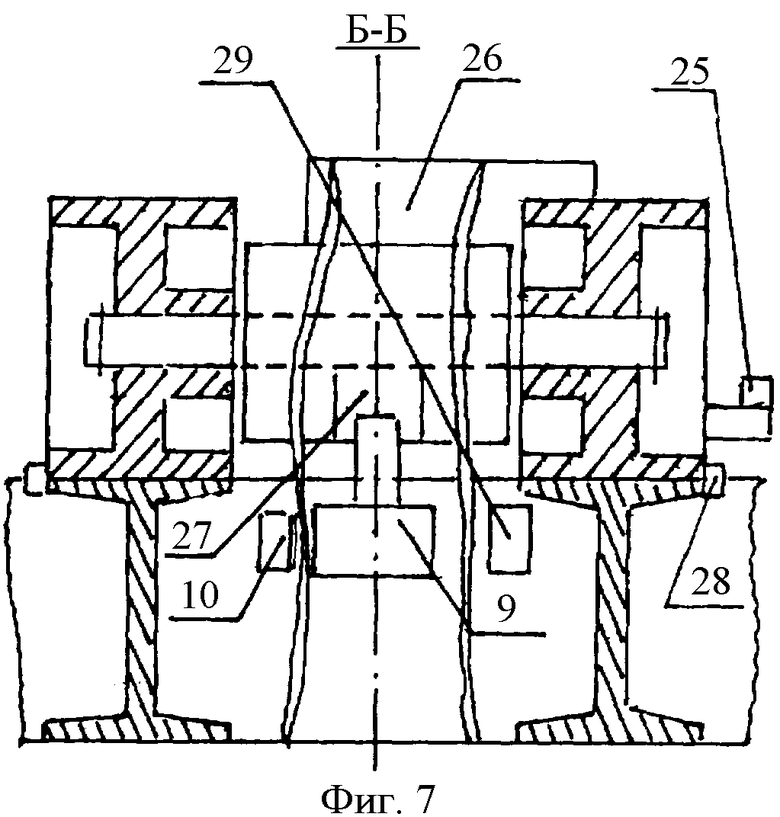
На фиг.7 показан разрез автоматического колесного тягача.
Сведения, подтверждающие возможность осуществления каждого объекта заявленной группы изобретений с получением указанного технического результата, состоят в следующем.
Заявленный способ парковки автомобилей предусматривает возможность реализации многовариантных технических решений при сооружении многоэтажных парковочных стоянок-гаражей, каждое из которых выбирают исходя из учета имеющихся возможностей для размещения стоянки - располагаемой площади и положения площадки относительно транспортных магистралей, остановок общественного транспорта, крупных предприятий, торговых центров, жилых массивов, учебных заведений, мест отдыха и так далее.
Заявленный способ позволяет дополнительно выбрать оптимальное соотношение между техническими, эксплуатационными и экономическими показателями сооружаемого объекта, такими как численность, габариты и масса паркуемых автомобилей, этажность, время, затрачиваемое клиентом на парковку и получение автомобиля, коэффициент использования площади, себестоимость одного автомобилеместа.
Существенной особенностью способа для достижения указанного технического результата является использование для горизонтального транспортирования платформ автоматического управляемого тягача с электроприводом, питающее напряжение на который подается через контактную шину.
Преимущество такого колесного тягача перед различного рода манипуляторами аналогичного назначения - сравнительная простота конструкции и практически неограниченная дальность перемещения со скоростью порядка 4-6 м/с.
С учетом вышесказанного возможны следующие варианты исполнения парковочных стоянок-гаражей. Минимальный по вместимости - стоянку выполняют в одну секцию и в один ряд вокруг лифтового пролета с каждой стороны, лифтовая клеть - стационарная с одноярусной, одноячеечной клетью, при желании увеличить вместимость увеличивают количество секций, при этом возможны разные варианты исполнения лифтового подъемника - стационарного или портального, клеть - с одним или более ярусами, с одной или более парой направляющих поверхностей. За один вертикальный ход лифта трехярусная клеть может обработать три этажа, трехячеечная клеть с тремя парами направляющих поверхностей - три секции, а их комбинация - девять боксов с платформами, таким образом увеличивают количество возможных вариантов исполнения и производительность процесса загрузки-выгрузки автомобилей.
При наличии стационарных подъемников одновременно работают все секции, но при этом необходимо иметь для каждой секции свой подъемник, что влечет за собой увеличение стоимости объекта, передвигающийся по рельсам портальный подъемник может обслуживать несколько секций, но только поочередно, увеличение числа ярусов или ячеек на одном ярусе позволяет увеличить количество обслуживаемых секций и этажей, сокращая необходимое количество подъемников в стационарном варианте, но в то же время увеличивает потребную грузоподъемность лифта. Следует отметить, что для портального варианта целесообразно использовать только один подъемник, так как он за счет своего передвижения по пролету обслуживает несколько секций.
Для более существенного увеличения вместимости и для улучшения экономических показателей увеличивают количество рядов вокруг лифтового пролета с каждой стороны, при этом соответственно увеличивают число ярусов лифтовой клети. Таким образом, например, в трехрядном варианте трехярусная клеть обслуживает шесть рядов боксов - по три с каждой стороны. При необходимости извлечения платформы из крайнего третьего ряда производят последовательно следующие операции - тягачом извлекают в клеть на первый ярус платформу из ближнего первого ряда, далее клеть перемещают на второй ярус и извлекают платформу из второго ряда, таким образом извлекают и искомую платформу из третьего ряда на третий ярус клети и лифт доставляет ее на загрузочно-разгрузочную площадку.
При необходимости извлечения платформы из ближнего первого ряда количество последовательных операций соответственно сокращается, при этом появляется возможность забрать платформы на остальные свободные ярусы из других этажей и в том числе из противоположного ряда с другой стороны лифтового пролета, а для портального подъемника - и из других секций. Приведенные примеры показывают многообразие вариаций заявляемого способа как по вариантам строительства стоянок, так и по процессам их перемещения внутри здания. Наличие же компьютерного или микропроцессорного управления процессом загрузки-выгрузки платформ позволяет оптимизировать этот процесс с точки зрения разрешения текущей ситуации по наиболее выгодному для клиента варианту - по времени, по числу проведенных операций и времени их проведения - в целом для процесса перемещения платформ внутри устройства.
Помимо вышесказанного, заявляемый способ позволяет расширить многовариантность исполнения стоянок следующим образом. Платформы располагают внутри здания двумя способами - продольным или поперечным, в первом случае платформу перемещают по направляющим поверхностям по ходу движения автомобиля, во втором - перпендикулярно этому ходу. В обоих случаях операции по загрузке-выгрузке могут производиться одновременно - с правой и левой сторон относительно лифтового пролета. В продольном варианте платформы целесообразно выталкивать под загрузку-выгрузку за стены здания, так как несущие колонны внутри него будут препятствовать проходу клиента к автомобилю и открыванию его двери. В поперечном варианте для возможности одновременного для всех секций въезда-выезда целесообразно выталкивать платформы ступенчато - на разные расстояния от лифтовой клети.
Для дальнейшего увеличения производительности процесса загрузки-выгрузки применяют двухуровневую парковку, но она возможна лишь при наличии дополнительной площади. Для снижения стоимости автомобилеместа целесообразно разбить на несколько унифицированных габаритных групп паркуемые автомобили, в этом случае сооружают комплекс, в котором каждое здание соответствует определенной габаритной группе.
Что касается оценки скорости проведения процесса загрузки-выгрузки автомобилей, то по заявляемому способу ограничением являются лишь скоростные возможности известных лифтовых подъемников, а целесообразная скорость передвижения колесного тягача для стоянки-гаража находится в пределах 4-6 м/с.
Из условия, что средние значения для скоростей перемещения для лифтового подъемника, тягача и портала вдоль пролета соответственно равны: 2 м/с, 4 м/с, 2 м/с, а длина, ширина и высота ячейки хранения для среднестатистического автомобиля соответственно равны: 5 м, 2,5 м, 2 м, время, затрачиваемое на проведение следующих последовательных технологических операций, равно для продольного и поперечного варианта соответственно:
- забор платформы из первого ряда и перемещение ее на один этаж -3,5 с, 2,25 с;
- забор платформы из второго ряда и перемещение ее на один этаж - 6 с, 3,5 с;
- забор платформы из третьего ряда и перемещение ее на один этаж - 8,5 с, 4,75 с.
Суммарное время, необходимое для забора платформы из n ряда, перемещения ее на десять этажей и выталкивания тягачом на площадку загрузки-выгрузки:
- для забора платформы из третьего ряда - 32 с, 23 с;
- для забора платформы из второго ряда - 23,5 с, 18 с;
- для забора платформы из первого ряда - 17,5 с, 14 с.
Для портального варианта суммарное время увеличится соответственно незначительно - на 1,25 с, на 2,5 с - из расчета перемещения на одну секцию.
Таким образом, даже при умеренных скоростях передвижения тягача и лифтового подъемника время перемещения автомобиля внутри здания по заявляемому способу сравнительно невелико и сопоставимо с временем, необходимым клиенту для заезда-выезда в секцию и на платформу, прохода в секцию и из нее, тем более, что клиенту нет необходимости в случае сдачи автомобиля на парковку дожидаться окончания процесса доставки его в искомый бокс хранения.
Для осуществления заявленного способа предлагается устройство автоматизированной загрузки-выгрузки автомобилей в многоэтажных парковочных стоянках-гаражах. Данное устройство сооружают каркасного типа, состоящее из лифтового пролета 1, боксов 2, лифтовых клетей 3. Параллельно лифтовому пролету располагаются ряды боксов 4, отделенные друг от друга колоннами 5, лифтовая клеть 3 состоит из ярусов 6 (фиг.1). Поперечные балки каркаса здания 7 одновременно являются направляющими поверхностями для перемещения тягачей и платформ, на продольных балках для фиксации платформ устанавливают ограничительные неподвижные башмаки 8 и управляемые - 9, в одной плоскости с неподвижными и управляемыми башмаками располагают контактные датчики 10, подающие сигнал на пульт управления в момент встречи платформы с башмаком. Управляемые башмаки и контактные датчики устанавливают также и в каждой ячейке лифтовой клети. В боксах неподвижные башмаки располагают только в крайних от лифтового пролета рядах, между соседними платформами устанавливают один управляемый башмак, таким образом число управляемых башмаков в боксах равно числу платформ.
Секции боксов 11 образуются в вертикальной плоскости здания поперек лифтового пролета 1. Ячейки лифта 12 располагают на каждом ярусе 6 лифтовой клети 3. Портал 13 передвигается по рельсам вдоль лифтового пролета, колонны 5 связываются между собой продольными балками 14 (фиг.2). На фиг.1 и 2 изображен комбинированный вариант клетей - две секции обслуживает стационарная двухячеечная двухярусная клеть 12, четыре остальные секции обслуживает портальная одноячеечная двухярусная клеть 13.
По направляющим поверхностям 7 перемещаются платформы 15 (фиг.3) и тягачи 16 (фиг.4) с устройством 17, осуществляющим включение-выключение электромагнитной сцепки с подвижной платформой и изменяющим полярность питающего напряжения.
Подвижные платформы с целью уменьшения потребной высоты бокса 2 изготавливают малоразмерными по высоте (80-100 мм). На раме 18 платформы 15 устанавливают неподвижную перегородку 19 (фиг.5), ролики 20, свободно обкатывающиеся вокруг осей 21, магнитную площадку сцепки с тягачом 22 и подпружиненную стойку 23, автоматически убирающуюся при проталкивании тягачом платформы за счет перемещения относительно клинообразного толкателя 24, неподвижно закрепленного в секции загрузочно-разгрузочной площадки (фиг.6). Неподвижную перегородку 19 и подпружиненную стойку 23 устанавливают на уровнях переднего и заднего бамперов для исключения возможного перемещения автомобиля вдоль платформы в момент сцепки с тягачом и в момент контакта платформы с башмаком.
По контактной шине 25 подается напряжение на электропривод 26 и электромагнит сцепки 27 подвижного тягача 16. На направляющих поверхностях боксов и лифтовых клетей закрепляют продольные перегородки 28, в одной плоскости с контактными датчиками 10 устанавливают демпферы 29, которые предназначены для уменьшения перегрузки в момент встречи платформы или тягача с башмаком (фиг.7).
Для обеспечения автоматизации процесса загрузки-выгрузки автомобилей лифтовые клети снабжают механизмами, электрически связанными с пультом управления:
- фиксаторами, стопорящими лифтовую клеть относительно направляющих лифтового подъемника после ее остановки на заданном этаже и позволяющими совместить в одну плоскость направляющие поверхности клети и боксов;
- ограничительными башмаками, предотвращающими перемещение тягачей и платформ после их въезда в лифтовую клеть;
- счетчиками номера этажа и дополнительно для портальных клетей - счетчиками номера секции.
Следует отметить, что заявленное устройство не требует каких-либо регулировок в процессе монтажа и при эксплуатации.
Работа устройства парковки происходит следующим образом. Клиент подъезжает к парковочной площадке, вводит в терминал электронную карту, сообщая предположительную продолжительность парковки, садится в автомобиль, въезжает на платформу в указанной секции, ставит автомобиль на ручной тормоз, выходит из него, при его выходе из прохода срабатывает оптический датчик, а на пульте управления снимается ранее установленная блокировка, далее процесс парковки происходит без его участия. После этого лифтовая клеть 3 по команде с пульта управления пустым ярусом выводится на загрузочную площадку, убираются (расстопариваются) башмаки площадки и ближний по ходу - лифтовой клети, замыкается цепь электромагнита сцепки 27 тягача 16 со стороны платформы, в результате этого сцепленный с платформой тягач движется с площадки в лифтовую клеть.
В момент встречи корпуса тягача с неубранным на противоположной стороне клети башмаком срабатывает установленный в ней контактный датчик 10 и выдает об этом сигнал на пульт управления, после этого обесточиваются контактные шины, тягач с платформой останавливается и башмаки возвращаются в выдвинутое стопорное положение. Одновременно в момент встречи в устройстве сцепки 27 тягача разрывается цепь питания электромагнита сцепки. Далее, по команде с пульта управления лифтовая клеть поднимается на необходимый этаж, при этом направляющие поверхности и контактные шины клети и бокса выводятся в одну плоскость и фиксируются, после чего на контактные шины 25 ячейки клети и бокса параллельно подается ток определенной полярности, одновременно ток подается на соленоиды башмаков соответствующих сторон клети и бокса и тягач с платформой движется беспрепятственно, выталкивая платформу из ячейки клети в искомый бокс через убранные башмаки.
В момент контакта загруженной автомобилем платформы с контактным датчиком искомого бокса и ряда на пульт управления поступает сигнал об этом контакте, в результате с пульта подается команда на возврат в выдвинутое положение ранее убранного башмака и на изменение полярности питающего напряжения тягача - платформа с автомобилем стопорится башмаком, а пустой тягач движется обратно в ячейку лифтовой клети, где после контакта с неубранным башмаком и контактным датчиком по команде с пульта управления аналогичным образом останавливается и блокируется от перемещения внутри ячейки вторым башмаком.
В случае возврата автомобиля из парковки, клиент вводит в терминал электронную карту - в результате по команде с пульта управления тягач в лифтовой ячейке поднимается на необходимый этаж и извлекает из искомого бокса платформу с автомобилем клиента и выталкивает ее на загрузочно-разгрузочную площадку, после чего по команде с пульта управления застопорится башмак на площадке и автоматически уберется подвижный ограничитель перемещения - подпружиненная стойка 23 на платформе, пустой тягач возвратится в ячейку клети и заблокируется загрузочно-разгрузочная площадка. Клиент по проходу проходит в автомобиль, снимает его с ручного тормоза, заводит и выезжает за пределы площадки.
В случае нахождения искомой платформы в дальнем от лифтового пролета ряду проводится процедура последовательных операций, описанных выше, по перемещению платформ на разные ярусы лифтовых ячеек. Далее, в зависимости от текущей ситуации компьютер решает - оставить освободившуюся платформу под погрузку или отправить ее в пустующий на данный момент бокс. Следует отметить, что в заявленном способе все лево- и соответственно правосторонние относительно лифтового пролета платформы при всех возможных перемещениях по рядам, этажам, а для портального варианта - и по секциям должны возвращаться только на свои стороны с той только разницей, что за один проход вертикального перемещения клети возможен забор платформ на разные ярусы клети из правых и левых рядов и соответственно их загрузки-разгрузки на своей стороне.
Таким образом, изложенные сведения показывают, что при использовании заявленной группы изобретений выполнена следующая совокупность условий:
- средства, воплощающие заявляемую группу изобретений при их осуществлении, предназначены для использования в области транспорта, а именно для хранения, загрузки-выгрузки автомобилей в многоэтажных парковочных стоянках-гаражах;
- для заявляемой группы изобретений в том виде, как они охарактеризованы в независимых пунктах изложенной формулы изобретения, подтверждена возможность их осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов;
- средства, воплощающие заявляемую группу изобретений при их осуществлении, способны обеспечить достижение усматриваемого заявителем результата.
Преимущество группы изобретений состоит в том, что предложен способ парковки, позволяющий реализовать в устройствах многовариантные решения конструкций автостоянок-гаражей с достаточно высокой производительностью загрузки-выгрузки, простых в изготовлении, не требующих какой-либо регулировки в процессе эксплуатации, с оптимальным для каждого варианта соотношением между техническими, экономическими и эксплуатационными показателями.
Источники информации
1. Патент RU 2302500 C2 от 30.05.2005, МПК E04H 6/18 (2006.01), 2005116405/03.
2. Заявка на изобретение RU 2003106057/03 А, 7 E04H 6/18, 04.03.2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЕЙ | 2008 |
|
RU2373355C1 |
| МНОГОЯРУСНАЯ АВТОМАТИЗИРОВАННАЯ АВТОСТОЯНКА МОДУЛЬНОГО ТИПА | 2008 |
|
RU2376430C1 |
| МНОГОУРОВНЕВАЯ АВТОМОБИЛЬНАЯ СТОЯНКА | 2008 |
|
RU2374410C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПАРКОВКИ АВТОМОБИЛЕЙ | 2008 |
|
RU2386763C2 |
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЕЙ ПРЕИМУЩЕСТВЕННО В МЕГАПОЛИСАХ | 2008 |
|
RU2386764C2 |
| АВТОМАТИЧЕСКИЙ МНОГОЭТАЖНЫЙ ГАРАЖ-ПЕНАЛ | 2004 |
|
RU2324040C2 |
| ГАРАЖНОЕ УСТРОЙСТВО | 2011 |
|
RU2455438C1 |
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491397C1 |
| АВТОМАТИЗИРОВАННЫЙ ГАРАЖ-АВТОСТОЯНКА | 1996 |
|
RU2109118C1 |
| МОДУЛЬ МНОГОЭТАЖНОГО ГАРАЖА | 2008 |
|
RU2370608C1 |
Изобретение относится к области транспорта и предназначено для применения при сооружении многоэтажных парковочных стоянок-гаражей для хранения и загрузки-выгрузки автомобилей. Способ парковки автомобилей в многоэтажных парковочных стоянках-гаражах с оппозитным расположением боксов хранения относительно лифтового пролета заключается в вертикальном перемещении незагруженных и загруженных автомобилями платформ лифтовыми клетями и горизонтальном перемещении платформ в бокс хранения и обратно в лифтовую клеть. Боксы для хранения подвижных платформ располагают по одному из вариантов - в один или более рядов вокруг лифтового пролета с каждой стороны, а горизонтальное перемещение платформ осуществляют по направляющим поверхностям колесным автоматическим тягачом, имеющим электропривод и устройство электромагнитной сцепки с платформой, вертикальное перемещение платформ производят при использовании одно- или многоячеечной лифтовой клети с количеством в один или более ярусов. Также описано устройство парковки автомобилей в многоэтажных парковочных стоянках-гаражах. Технический результат: высокая производительность загрузки-выгрузки, простота в изготовлении, оптимальное для каждого варианта соотношение между техническими, экономическими и эксплуатационными показателями. 2 н. и 5 з.п. ф-лы, 7 ил.
1. Способ парковки автомобилей в многоэтажных парковочных стоянках-гаражах с оппозитным расположением боксов хранения относительно лифтового пролета, заключающийся в вертикальном перемещении незагруженных и загруженных автомобилями платформ лифтовыми клетями и горизонтальном перемещении платформ в бокс хранения и обратно в лифтовую клеть, отличающийся тем, что боксы для хранения подвижных платформ располагают по одному из вариантов - в один или более рядов вокруг лифтового пролета с каждой стороны, а горизонтальное перемещение платформ осуществляют по направляющим поверхностям колесным автоматическим тягачом, имеющим электропривод и устройство электромагнитной сцепки с платформой, вертикальное перемещение платформ производят при использовании одно- или многоячеечной лифтовой клети с количеством в один или более ярусов, при этом, в случае необходимости извлечения платформы из крайнего по отношению к лифтовому пролету ряда, производят последовательно следующие операции: тягачом извлекают в клеть на первый ярус платформу из ближнего первого ряда, далее клеть перемещают на второй ярус и извлекают платформу из второго ряда, таким образом извлекают и искомую платформу, затем доставляют ее на загрузочно-разгрузочный этаж, который располагают на открытой на улицу наземной площадке, далее, в случае разгрузки, клиент садится в автомобиль и выезжает с платформы на улицу, в случае загрузки, клиент въезжает на платформу, ставит автомобиль на ручной тормоз и выходит из него, в последующем процесс доставки автомобиля и платформ из других ярусов клети на прежнее место происходит без его участия, при этом последовательность размещения и перемещения платформ по рядам осуществляет компьютер или микропроцессор по наиболее оптимальному варианту.
2. Способ по п.1, отличающийся тем, что клиент осуществляет парковку или возврат автомобиля с помощью электронной карты на терминале, а продляет или сокращает парковку дистанционно - по средствам связи или Интернету.
3. Устройство парковки автомобилей в многоэтажных парковочных стоянках-гаражах, состоящее из здания, содержащего в центре лифтовой пролет с клетями для перемещения автомобилей в вертикальном направлении и расположенные в обе стороны от него боксы для хранения незагруженных и загруженных автомобилями подвижных платформ, отличающееся тем, что боксы располагают по одному из вариантов - в один или более рядов вокруг лифтового пролета с каждой стороны, также по одному из вариантов изготавливают одно- или многоместные лифтовые клети - с одним или более ярусов, расположенных друг над другом, при этом на каждом ее ярусе располагают по одной или более параллельных друг другу ячеек с одной парой направляющих поверхностей и контактной шиной в каждой из них, кроме того, лифтовые клети применяют в трех вариантах исполнения - или в виде передвижного портала, перемещающегося по рельсам вдоль пролета с помощью электропривода и поочередно обслуживающего две или более секции, или в виде стационарного неподвижного подъемника, обеспечивающего работу одной секции каждой ячейкой, или комбинацию тех и других видов клетей, каждая ячейка клети содержит автоматический колесный тягач с электроприводом, осуществляющим перемещение платформ по направляющим поверхностям в боксы и обратно, направляющие поверхности боксов одновременно являются балками-перекрытиями поверхности боксов, одновременно являются балками-перекрытиями силового каркаса здания стоянки-гаража, на направляющих поверхностях ячеек лифтовых клетей и боксов устанавливают на внутренних или внешних сторонах продольные перегородки, ограничивающие поперечное смещение колес тягача и роликов платформы, на тягаче размещают устройство, производящее изменение полярности питающего напряжения электропривода и включение-выключение двух электромагнитов сцепки с подвижной платформой, электромагниты устанавливают на раме тягача спереди и сзади по ходу движения, загрузку-выгрузку автомобилей выполняют на одном из этажей здания, расположенном на открытой на улицу наземной площадке, в каждой секции площадки устанавливают оптический датчик, подающий сигнал на пульт управления о снятии блокировки при выходе клиента из секции после окончания им парковки автомобиля на подвижную платформу, процесс управления перемещением и размещением платформ осуществляют с пульта управления подачей команд управления и питающих напряжений по контактным шинам и проводам на боксы, лифтовые клети, тягачи и секции загрузочно-разгрузочной площадки через компьютер или микропроцессор.
4. Устройство по п.3, отличающееся тем, что здание или комплекс зданий парковочной стоянки-гаража выполняют каркасного типа без межэтажных перекрытий и по одному из вариантов - наземному, подземному или комбинированному наземно-подземному, межэтажные перекрытия облегченного типа выполняют только по периметру здания для обеспечения доступа обслуживающего персонала к устройствам системы автоматики.
5. Устройство по п.3, отличающееся тем, что на балках каркаса здания в боксах перед подвижными платформами в крайних от лифтового пролета рядах устанавливают ограничительные неподвижные башмаки, а в остальных рядах - управляемые с пульта управления башмаки, фиксирующие платформы на направляющих поверхностях после их въезда в бокс, в одной плоскости с неподвижными и управляемыми башмаками также устанавливают контактные датчики, подающие сигнал на пульт управления в момент встречи платформы с башмаком, и демпферы - для уменьшения перегрузки в этот момент.
6. Устройство по п.3, отличающееся тем, что лифтовые клети снабжают фиксаторами, электрически соединенными с пультом управления, позволяющими совместить в одну плоскость направляющие поверхности, контактные шины лифтовой клети и рядов боксов после остановки лифтовой клети на заданном этаже, на направляющие поверхности каждой ячейки клети устанавливают два управляемых с пульта управления башмака, предотвращающих продольное перемещение тягачей и платформ после их въезда в ячейку клети, в одной плоскости с ними закрепляют два контактных датчика, подающих сигнал на пульт управления в момент встречи платформы или тягача с башмаком, и демпферы - для уменьшения перегрузки в этот момент, кроме того, лифтовые клети снабжают счетчиком номера этажа, а порталные клети дополнительно - счетчиком номера секции.
7. Устройство по п.3, отличающееся тем, что на подвижной платформе устанавливают ряды полых роликов, свободно обкатывающихся вокруг оси меньшего диаметра, на раме в передней части по ходу движения крепят площадку из магнитного материала для сцепки с электромагнитом тягача и ограничительную неподвижную перегородку, на раме в задней части располагают также ограничительную подвижную перегородку для предотвращения перемещения автомобиля вдоль платформы, подвижную перегородку выполняют в виде подпружиненной стойки, автоматически убирающуюся при проталкивании тягачом платформы на загрузочно-разгрузочную площадку.
| RU 2003106057 A, 10.09.2004 | |||
| СПОСОБ ПЕРЕМЕЩЕНИЯ АВТОМОБИЛЕЙ | 2005 |
|
RU2302500C2 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| 1991 |
|
RU2003600C1 | |
| US 6168365 B1, 02.01.2001 | |||
| US 6332743 B1, 25.12.2001. | |||

