Предлагаемое изобретение относится к устройствам вибрационного контроля и защиты роторных агрегатов, таких, например, как турбины.
Известно устройство контроля и защиты от повреждений, содержащее измерительные блоки, соединенные последовательно, причем выход последнего блока в каждой группе измерительных блоков соединен с сходом компьютера, выход которого является выходом управления, контролируемым оборудованием [US patent application publication US 2004/0054921 A1, 18.03.2004].
Недостатком данной системы является сравнительно низкая надежность и достоверность функционирования.
Известно устройство вибрационного контроля, содержащее датчик вибрации, выход которого соединен с входом блока сбора и обработки данных, который содержит одноканальный аналого-цифровой преобразователь, выход которого соединен с входом процессора обработки сигналов, выход которого соединен с цифровым входом микроконтроллера, цифровой последовательный интерфейс которого соединен с последовательной асинхронной шиной, а выход сигнала аварии микроконтроллера является выходом сигнала аварийной ситуации контролируемого объекта блока сбора и обработки данных, последовательная асинхронная шина соединена через адаптер асинхронных шин с входом USB компьютера. [Научно - производственное предприятие «Измерительные Технологии», ”Каталог продукции 2007”, http://mtels.ru/catalogue.html, стр.21, 2007 г.].
К недостаткам данного решения следует отнести сравнительно низкую надежность и достоверность функционирования данного устройства. Действительно, с одной стороны обработка сигнала от датчика выполняется последовательно аналого-цифровым преобразователем, процессором обработки сигнала и микроконтроллером. Это приводит к росту количества оборудования, пропорциональному числу узлов в канале, а большое количество оборудования само по себе приводит к увеличению вероятности отказа. С другой стороны, отказ одного из элементов в данном канале приводит к полному отказу канала и это снижает достоверность обнаружения аварийной ситуации и, следовательно, надежность системы. В данном устройстве отсутствует реализация логики защиты, которая в таких системах выполняется внешним модулем логики защиты, который реализован на основе микроконтроллера, что при любом отказе (обрыв линии связи, аппаратурный отказ в модуле логики защиты или программный сбой в его микроконтроллере) приведет к отказу всей системы защиты роторного агрегата.
Известно устройство контроля вибрации, содержащее датчик вибрации, выход которого соединен с входом блока сбора и обработки данных, содержащего элемент сравнения измеренного значения с заданным порогом [Патент Российской Федерации №2282169, G01M 7/00, приор. 13.05.2005].
Недостатком данного устройства является сравнительно низкая достоверность определения недопустимого вибрационного состояния контролируемого объекта, так как в нем решение принимается на основании информации, поступающей только от одного датчика.
Известна система вибрационной диагностики и предупреждения аварийной ситуации на эксплуатируемом объекте, содержащая датчики вибрации, выходы которых через согласующие элементы подключены к элементу сравнения, выход которого соединен с входом порогового элемента Патент Российской Федерации №2288470, G01N 29/04, приор. 04.04.2005].
Недостатками данной системы являются сравнительно низкая надежность, так как повреждение отдельного элемента устройства нарушает его работоспособность в целом.
Для повышения достоверности срабатывания защиты по превышению порога опасного уровня вибрации рекомендуется обеспечивать ее срабатывание при превышении значения «для горизонтальной и вертикальной вибрации для двух соседних опор или по их сочетанию. Под соседними понимаются подшипники одного ротора или смежные подшипники разных роторов» роторного агрегата [раздел 3.3.5 РД 153-34.1-35.116-2001, стр.18. РАО БЭС, ОРГРЭС, 2001 г.].
Известно устройство вибрационного контроля, содержащее датчики, выходы которых соединены с входами блока сбора и обработки данных, которые соединены с входами согласующих элементов, выходы которых соединены с входами многоканального аналого-цифрового преобразователя, выход которого соединен с входом процессора обработки сигналов, выход которого соединен с входом микроконтроллера, выход которого через интерфейсный элемент соединен с шиной передачи данных, которая подключена к входу компьютера [Патент США №7142990 В2, МКИ G06F 11/00, Н.кл. 702/35, 2006 г.].
Недостатком этого устройства является его сравнительно низкая надежность и достоверность функционирования.
Известно устройство вибрационного контроля, содержащее измерительные блоки, входы каждого из которых соединены через согласующий элемент с выходом соответствующего датчика, измерительные блоки содержат формирователи сигналов, два аналого-цифровых преобразователя, входы которых соединены с выходами формирователей сигналов, выход первого аналого-цифрового преобразователя соединен с цифровым входом второго аналого-цифрового преобразователя, выход которого соединен с входом процессора обработки сигналов, выход цифрового последовательного интерфейса, который является выходом данного блока сбора и обработки данных, измерительные блоки соединены последовательно и выход последнего соединен с входом сетевого контроллера компьютера [Multi-drop, simultaneous sampling sensor network system for aerospace testing and monitoring applications. A.Karolys, F.GenKuong, Sensors applications symposium, 2007, IEEE Volume, Issue, 6-8 Feb 2007, p.1-6].
Недостатками данного устройства являются сравнительно низкая надежность и достоверность функционирования. Действительно, отказ одного из измерительных блоков приводит к неработоспособности всей системы в целом как из-за разрыва шины передачи данных в компьютер, так и из-за потери информации от датчиков, подключенных к данному измерительному блоку, а следовательно, к пропуску сигналов о превышении опасного уровня вибрации, которое может быть зафиксировано этими датчиками.
Известно устройство вибрационного контроля, но содержащее измерительные блоки, аналоговые входы каждого из которых соединены с выходам соответствующих датчиков, которые объединены в группу, соответствующую узлу контролируемого агрегата, сетевой выход каждого из измерительных блоков соединен сетевой шиной, которая подключена к компьютеру, а выходы аварийных сигналов измерительных блоков соединены с шиной сигналов защиты контролируемого агрегата [Патент US №6012484 В2, приоритет от 28.06.2005, Н.кл. 702/188, МКИ G01F 1/56. Modular monitoring and protection system topology].
Наиболее близким к предложенному и выбранным в качестве прототипа является устройство вибрационного контроля, содержащее датчики, и блок сбора и обработки данных, который содержит первый аналого-цифровой преобразователь высокого разрешения, выход которого соединен с входом ввода данных процессора обработки сигналов, выход которого соединен через цифровой интерфейс с входами микроконтроллера, вход ввода данных которого соединен с выходом второго аналого-цифрового преобразователя, а выход микроконтроллера соединен через интерфейсный элемент с асинхронной последовательной шиной, которая соединена с входом последовательного интерфейса компьютера, выход которой является выходом аварийного сигнала, а входы первого аналого-цифрового преобразователя соединены через согласующие элементы с выходами датчиков [ICHM 20/20 Serial communication data acquisition and processing system / Getting started guide, 2004, Oceana Sensor Technologies Inc.].
Данное устройство, как наиболее близкое к предложенному, выбрано в качестве прототипа.
Целью предлагаемого изобретения является повышение надежности и достоверности функционирования системы вибрационного контроля.
Поставленная цель достигается тем, что в устройстве вибрационного контроля содержащем датчики, а также блок сбора и обработки данных, который содержит первый аналого-цифровой преобразователь, выход которого соединен с входом ввода данных процессора обработки сигналов, выход которого соединен через цифровой интерфейс с входами микроконтроллера, вход ввода данных которого соединен с выходом второго аналого-цифрового преобразователя, а выход микроконтроллера соединен через интерфейсный элемент с асинхронной последовательной шиной, которая соединена с входом последовательного интерфейса компьютера, выход которой является выходом аварийного сигнала, а выходы датчиков соединены с входами блока сбора и обработки данных, согласно изобретению входы блока сбора и обработки данных соединены через согласующие элементы с входами формирователя сигналов, выходы которого соединены с входами первого и второго аналого-цифровых преобразователей, входы синхронизации процессора обработки сигналов и микроконтроллера соединены с выходом датчика фазовой отметки, выход процессора обработки сигналов соединен через дополнительный интерфейсный элемент с дополнительной асинхронной последовательной шиной, которая соединена с дополнительным входом последовательного интерфейса компьютера, логические выходы процессора обработки сигнала и микроконтроллера соединены с входами модуля логики защиты, выход которого является дополнительным выходом аварийного сигнала, а шины питания соединены с входами модуля вторичного питания, выходы которого соединены с входами питания согласующих элементов.
В предлагаемом устройстве, с одной стороны, минимизируется количество измерительных блоков, количество которых не превышает количества подшипниковых узлов роторного агрегата, что позволяет существенно уменьшить количество процессоров обработки сигналов и микроконтроллеров, необходимых для реализации измерительных блоков. При этом за счет того, что каждый блок сбора и обработки данных параллельно обрабатывает сигналы как от датчиков, установленных на данном подшипниковом узле, так и от датчиков, установленных на соседнем подшипниковом узле, одновременно процессором обработки сигналов и микроконтроллером, обеспечивается резервирование такой обработки, и даже полный отказ процессора обработки сигналов или микроконтроллера, а также одного из аналого-цифровых преобразователей данного блока сбора и обработки данных не приведет к потере информации, относящейся к данным подшипниковым узлам. Поскольку в каждом измерительном блоке формируются оценки превышения уровня аварийных уставок вибрации для данного и соседних подшипниковых узлов, в измерительном блоке можно реализовать рекомендуемые алгоритмы защиты, причем в самом блоке выполнение данных алгоритмов дублируется, что повышает надежность, а выдача общего сигнала аварийного останова в виде функции монтажное ИЛИ для таких измерительных блоков позволяет получить отказоустойчивый высоконадежный сигнал защиты от аварии. Дополнительное повышение надежности системы обеспечивается за счет использования дублирующего формирования сигнала аварии на выходе компьютера, данные в который поступают по независимым каналам передачи данных по асинхронному последовательным интерфейсам, например сетевому каналу передачи данных.
Другое отличие устройства вибрационного контроля состоит в том, что второй аналого-цифровой преобразователь интегрирован с микроконтроллером.
Другое отличие устройства вибрационного контроля состоит в том, что в формирователе сигналов каждый вход соединен с входом интегрирующего элемента и с входом первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с выходами соответствующих интегрирующих элементов.
Другое отличие устройства вибрационного контроля состоит в том, что в формирователе сигналов каждый вход соединен с входом интегрирующего элемента, выход которого соединен с входом первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с выходами соответствующих интегрирующих элементов.
Другое отличие устройства вибрационного контроля состоит в том, что в формирователе сигналов каждый вход соединен с входом соответствующего первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с соответствующими входами формирователя сигналов.
Другое отличие устройства вибрационного контроля состоит в том, что в формирователе сигналов каждый вход соединен с входом соответствующего первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с входами формирователя сигналов, соответствующих датчикам, которые использованы для защиты.
Другое отличие устройства вибрационного контроля состоит в том, что в формирователе сигналов каждый вход соединен с входом соответствующего коммутирующего узла, который соединен с первыми контактами первого и второго коммутирующих элементов, переключающие контакты которых соединены с входами соответствующих первого и второго фильтра нижних частот, выходы которых соединены соответственно с первыми и вторыми выходами формирователя сигналов, а вторые входы коммутирующих элементов каждого коммутирующего узла соединены с дополнительными входами формирователя сигналов.
Другое отличие устройства вибрационного контроля состоит в том, что в формирователе сигналов входы соединены с входами матричного аналогового коммутатора, первые и вторые выходы которого соединены с входами соответственно первых и вторых фильтров нижних частот, выходы которых соединены соответственно с первыми и вторыми выходами формирователя сигналов, дополнительные входы которого соединены с дополнительными входами матричного аналогового коммутатора, управляющие входы которого соединены с шиной управляющего кода.
Другое отличие устройства вибрационного контроля состоит в том, что модуль логики защиты содержит логический элемент И, входы которого являются входами модуля логики защиты, а выход является его выходом.
Другое отличие устройства вибрационного контроля состоит в том, что модуль логики защиты содержит логический элемент ИЛИ, входы которого являются входами модуля логики защиты, а выход является его выходом.
Другое отличие устройства вибрационного контроля состоит в том, что модуль логики защиты содержит логический элемент ИЛИ и мажоритарный логический элемент, входы логического элемента ИЛИ, являются входами модуля логики защиты, а выход является его выходом, дополнительные входы модуля логики защиты соединены с входами мажоритарного логического элемента, выход которого соединен с дополнительным входом логического элемента ИЛИ.
Другое отличие устройства вибрационного контроля состоит в том, что модуль логики защиты содержит логические элементы И, ИЛИ и мажоритарный логический элемент, входы логического элемента И являются входами модуля логики защиты, а выход соединен с первым входом логического элемента ИЛИ, выход которого является выходом модуля логики защиты, дополнительные входы модуля логики защиты соединены с входами мажоритарного логического элемента, выход которого соединен с вторым входом логического элемента ИЛИ.
Другое отличие устройства вибрационного контроля состоит в том, что модуль вторичного питания содержит преобразователь напряжений, вход которого соединен с входами токоограничивающих элементов, выходы которых являются выходами модуля вторичного питания, входы которого через развязывающие диоды и токоограничивающий элемент соединены с входом преобразователя напряжений.
Другое отличие устройства вибрационного контроля состоит в том, что в качестве токоограничивающих элементов использованы стабилизаторы напряжения с защитой от короткого замыкания.
Другое отличие устройства вибрационного контроля состоит в том, что в качестве токоограничивающих элементов использованы самовосстанавливающиеся предохранители.
Другое отличие устройства вибрационного контроля состоит в том, что в качестве токоограничивающих элементов использованы токоограничивающие диоды.
Другое отличие устройства вибрационного контроля состоит в том, что фильтр нижних частот содержит операционный усилитель, выход которого является выходом фильтра нижних частот, вход которого соединен через первый резистор с первым выводом первого конденсатора, второй вывод которого соединен с общей шиной, которая соединена с прямым входом операционного усилителя, инверсный вход которого соединен через второй резистор с первым выводом первого конденсатора, инверсный вход операционного усилителя соединен через второй конденсатор с выходом операционного усилителя, который через третий резистор соединен с первым выводом первого конденсатора.
Другое отличие устройства вибрационного контроля состоит в том, что фильтр нижних частот содержит операционный усилитель, выход которого является выходом фильтра нижних частот, вход которого соединен через первый резистор с первым выводом первого конденсатора, второй вывод которого соединен с общей шиной, которая соединена с прямым входом операционного усилителя, инверсный вход которого соединен через второй резистор с первым выводом первого конденсатора, инверсный вход операционного усилителя соединен через второй конденсатор с выходом операционного усилителя, который через третий резистор соединен с первым выводом первого конденсатора, который через первый коммутирующий элемент соединен с первым выводом третьего конденсатора, второй вывод которого соединен с общей шиной, а выход операционного усилителя соединен через второй коммутирующий элемент с первым выводом четвертого конденсатора, второй вывод которого соединен с инвертирующим входом операционного усилителя.
Другое отличие устройства вибрационного контроля состоит в том, что интегрирующий элемент содержит операционный усилитель, выход которого является выходом интегрирующего элемента, вход которого соединен через первый резистор с первым выводом первого конденсатора, второй вывод которого соединен с общей шиной, которая соединена с прямым входом операционного усилителя, инверсный вход которого соединен через второй резистор с первым выводом первого конденсатора, инверсный вход операционного усилителя соединен через второй конденсатор с выходом операционного усилителя, который через третий резистор соединен с первым выводом первого конденсатора.
Другое отличие устройства вибрационного контроля состоит в том, что интегрирующий элемент содержит операционный усилитель, выход которого является выходом интегрирующего элемента, вход которого соединен через первый резистор с первым выводом первого конденсатора, второй вывод которого соединен с общей шиной, которая соединена с прямым входом операционного усилителя, инверсный вход которого соединен через второй резистор с первым выводом первого конденсатора, инверсный вход операционного усилителя соединен через второй конденсатор с выходом операционного усилителя, который через третий резистор соединен с первым выводом первого конденсатора, который через первый коммутирующий элемент соединен с первым выводом третьего конденсатора, второй вывод которого соединен с общей шиной, а выход операционного усилителя соединен через второй коммутирующий элемент с первым выводом четвертого конденсатора, второй вывод которого соединен с инверсным входом операционного усилителя.
Во втором варианте устройство вибрационного контроля содержит датчики, а также блок сбора и обработки данных, который содержит первый аналого-цифровой преобразователь, выход которого соединен с входом ввода данных процессора обработки сигналов, выход которого соединен через цифровой интерфейс с входами микроконтроллера, вход ввода данных которого соединен с выходом второго аналого-цифрового преобразователя, а выход микроконтроллера соединен через интерфейсный элемент с асинхронной последовательной шиной, которая соединена с входом последовательного интерфейса компьютера, выход которой является выходом аварийного сигнала, а выходы датчиков соединены с входами блока сбора и обработки данных, в котором входы блока сбора и обработки данных соединены через согласующие элементы с входами формирователя сигналов, выходы которого соединены с входами первого и второго аналого-цифровых преобразователей, входы синхронизации процессора обработки сигналов и микроконтроллера соединены с выходом датчика фазовой отметки, выход процессора обработки сигналов соединен с входом дополнительного интерфейсного элемента, логические выходы процессора обработки сигнала и микроконтроллера соединены с входами модуля логики защиты, выход которого является дополнительным выходом аварийного сигнала, а шины питания соединены с входами модуля вторичного питания, выходы которого соединены с входами питания согласующих элементов.
Другое отличие второго варианта исполнения устройства вибрационного контроля состоит в том, что в формирователе сигналов каждый вход соединен с входом соответствующего первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с входами формирователя сигналов, соответствующих датчикам, которые использованы для защиты.
Другое отличие второго варианта исполнения устройства вибрационного контроля состоит в том, что в формирователе сигналов входы соединены с входами матричного аналогового коммутатора, первые и вторые выходы которого соединены с входами соответственно первых и вторых фильтров нижних частот, выходы которых соединены соответственно с первыми и вторыми выходами формирователя сигналов, дополнительные входы которого соединены с дополнительными входами матричного аналогового коммутатора, управляющие входы которого соединены с шиной управляющего кода.
В третьем варианте исполнения устройство вибрационного контроля содержит датчики, а также блок сбора и обработки данных, который содержит первый аналого-цифровой преобразователь, выход которого соединен с входом ввода данных процессора обработки сигналов, выход которого соединен через цифровой интерфейс с входами микроконтроллера, вход ввода данных которого соединен с выходом второго аналого-цифрового преобразователя, а выход микроконтроллера соединен с входом интерфейсного элемента, и содержит также асинхронную последовательную шину, которая соединена с входом последовательного интерфейса компьютера, выход которой является выходом аварийного сигнала, а выходы датчиков соединены с входами блока сбора и обработки данных, в котором входы блока сбора и обработки данных соединены через согласующие элементы с входами формирователя сигналов, выходы которого соединены с входами первого и второго аналого-цифровых преобразователей, входы синхронизации процессора обработки сигналов и микроконтроллера соединены с выходом датчика фазовой отметки, выход процессора обработки сигналов соединен через дополнительный интерфейсный элемент с асинхронной последовательной шиной, логические выходы процессора обработки сигнала и микроконтроллера соединены с входами модуля логики защиты, выход которого является дополнительным выходом аварийного сигнала, а шины питания соединены с входами модуля вторичного питания, выходы которого соединены с входами питания согласующих элементов.
Другое отличие третьего варианта исполнения устройства вибрационного контроля состоит в том, что в формирователе сигналов каждый вход соединен с входом соответствующего первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с входами формирователя сигналов, соответствующих датчикам, которые использованы для защиты.
Другое отличие третьего варианта исполнения устройства вибрационного контроля состоит в том, что в формирователе сигналов входы соединены с входами матричного аналогового коммутатора, первые и вторые выходы которого соединены с входами соответственно первых и вторых фильтров нижних частот, выходы которых соединены соответственно с первыми и вторыми выходами формирователя сигналов, дополнительные входы которого соединены с дополнительными входами матричного аналогового коммутатора, управляющие входы которого соединены с шиной управляющего кода.
На фиг.1 показана структурная схема первого варианта устройства вибрационного контроля. На фиг.2-6 представлены варианты выполнения формирователя сигналов. На фиг.7 и 8 показаны структурные схемы вариантов исполнения коммутирующих элементов. На фиг.9 показана структурная схема варианта выполнения формирователя сигналов. На фиг.10-18 показаны варианты реализации модуля логики защиты. На фиг.19 показана структурная схема варианта выполнения вторичного узла питания. На фиг.20-22 показаны структурные схемы возможных вариантов выполнения фильтров нижних частот и интегрирующих элементов. На фиг.23 и 24 показаны структурные схемы второго и третьего вариантов выполнения устройства вибрационного контроля. На фиг.25 и 26 показаны примеры структурных схем процессора обработки сигналов и микроконтроллера. На фиг.27 приведены амплитудно-частотные характеристики фильтров нижних частот и интегрирующих элементов поясняющие их функционирование.
Устройство вибрационного контроля содержит блок сбора и обработки данных 1, датчики 2-6, установленные на подшипниковых узлах 7, а также датчики фазовой отметки 8 и осевого сдвига 9-11 ротора 12. Блок сбора и обработки данных 1 содержит первый 13 и второй 14 аналого-цифровые преобразователи. Выход 15 асинхронного интерфейса 16 передачи данных соединен с шиной передачи данных 17, которая через входной интерфейс 18 подключена к компьютеру 19, выход 20 которого является выходом сигнала защитного отключения агрегата. Выходы датчиков соединены с входами согласующих элементов 21-32, выходы которых соединены с входами формирователя сигналов 33. Выход первого аналого-цифрового преобразователя 13 соединен с входом ввода данных процессора обработки сигналов 34, выход которого соединен через цифровой интерфейс с входами микроконтроллера 35, вход ввода данных которого соединен с выходом второго аналого-цифрового преобразователя 14, входы синхронизации процессора обработки сигналов 34 и микроконтроллера 35 соединены с выходом датчика фазовой отметки 8, выход процессора обработки сигналов 34 соединен через дополнительный интерфейсный элемент 31 с дополнительной асинхронной последовательной шиной 36, которая соединена с дополнительным входом 37 последовательного интерфейса компьютера 19, логические выходы процессора обработки сигнала 34 и микроконтроллера 35 соединены с входами модуля логики защиты 38, выход которого является дополнительным выходом 39 аварийного сигнала, а шины 40 и 41 питания соединены с входами модуля вторичного питания 42, выходы которого соединены с соединены с входами питания согласующих элементов 21-32, а дополнительные выходы 43 являются шинами питания блока сбора и обработки данных 1.
Второй аналого-цифровой преобразователь 14 может быть интегрирован с микроконтроллером 35.
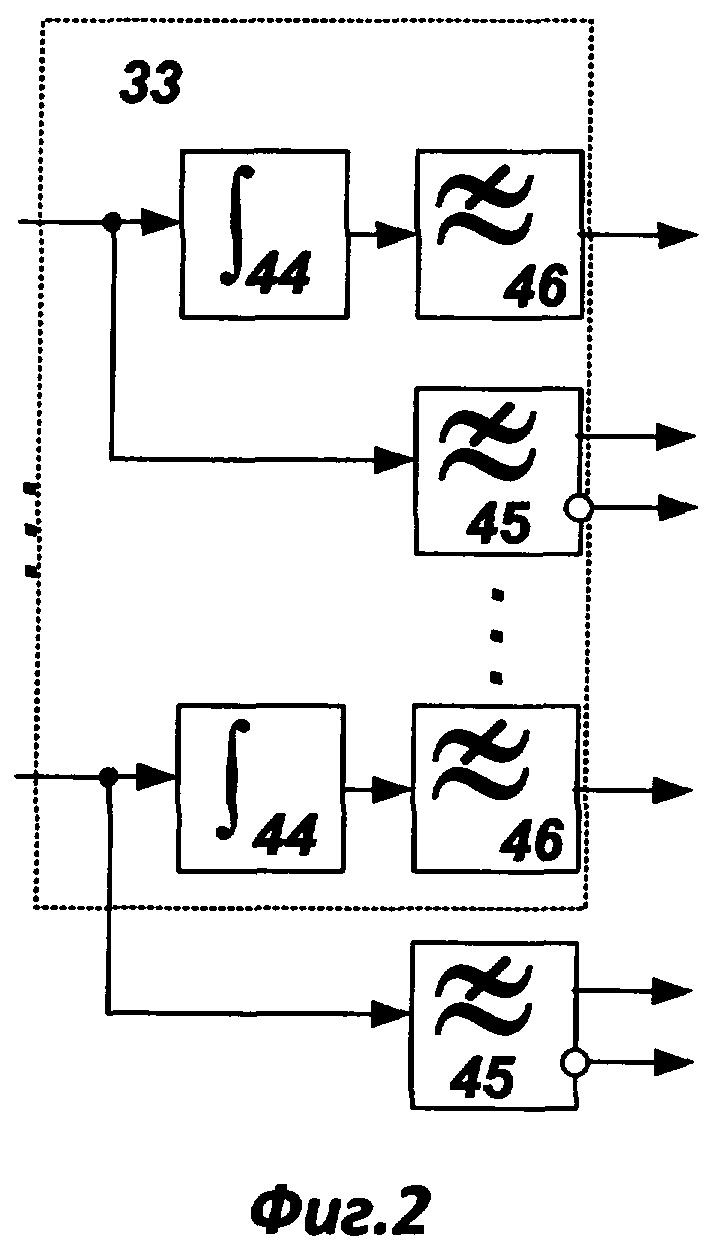
В формирователе сигналов 33 для каждого канала, как показано на фиг.2, каждый вход соединен с входом интегрирующего элемента 44 и с входом первого фильтра нижних частот 45, выходы которого соединены с первыми выходами формирователя сигналов 33, вторые выходы которого соединены с выходами вторых фильтров нижних частот 46, входы которых соединены с выходами соответствующих интегрирующих элементов 44.
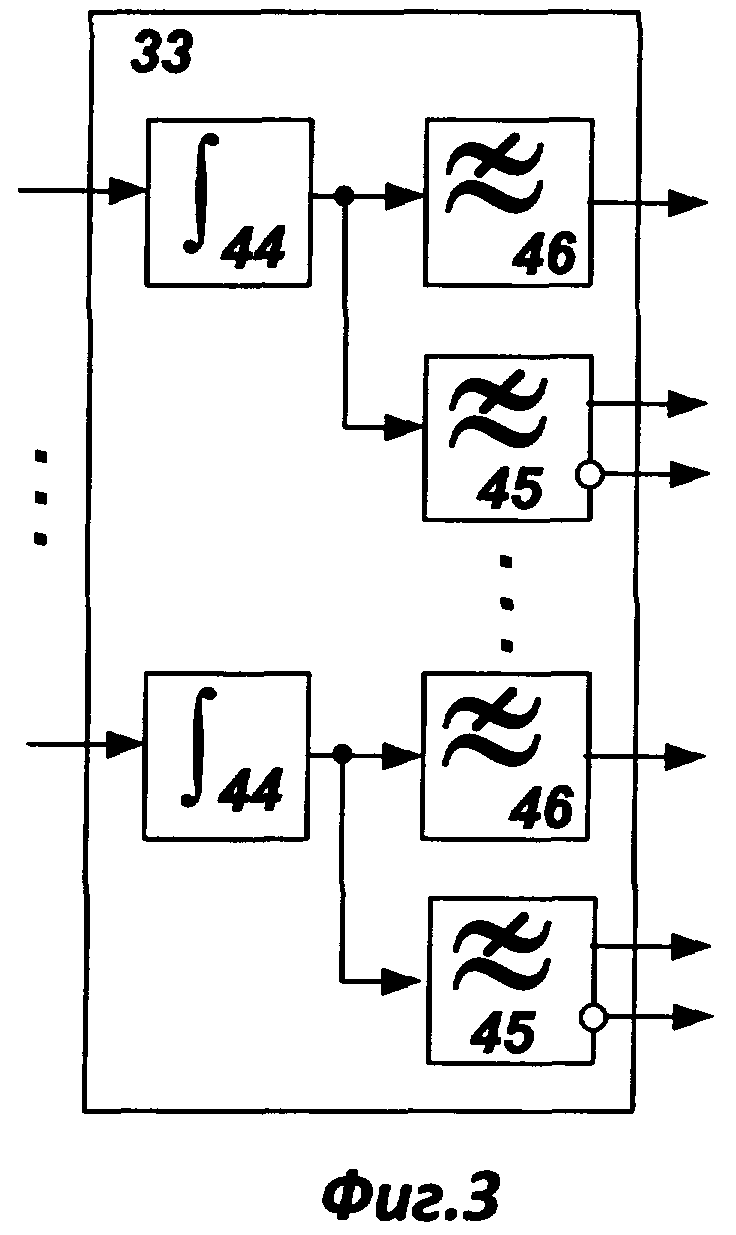
В формирователе сигналов 33 для каждого канала, как показано на фиг.3, каждый вход соединен с входом интегрирующего элемента 44, выход которого соединен с входом первого фильтра нижних частот 45, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот 46, входы которых соединены с выходами соответствующих интегрирующих элементов 44.
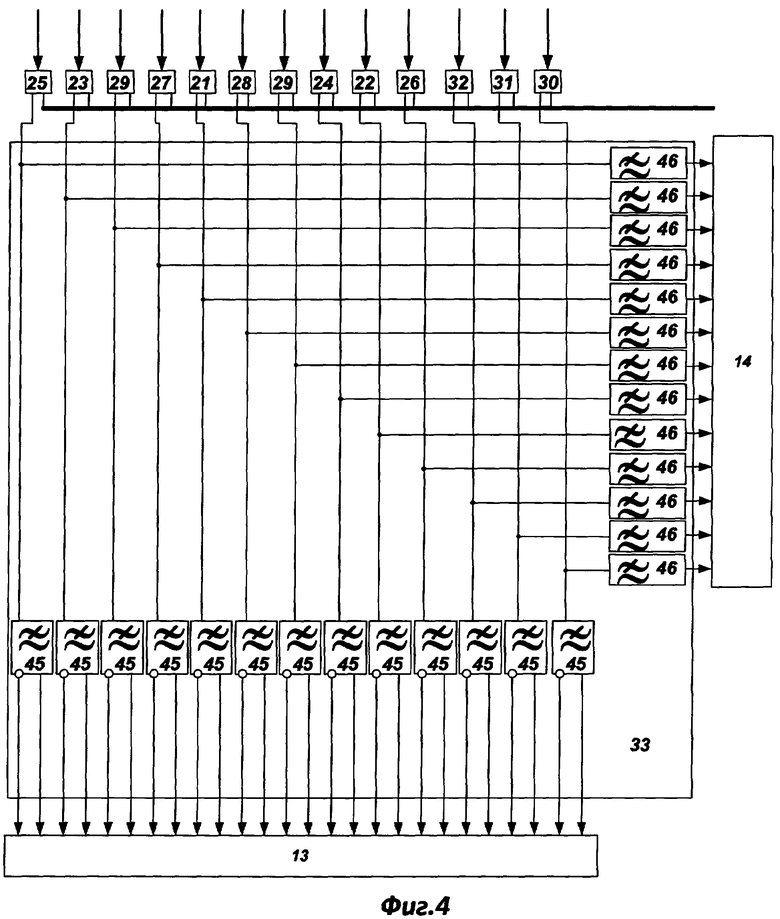
В формирователе сигналов 33, как показано на фиг.4, каждый вход соединен с входом соответствующего первого фильтра нижних частот 45, выходы которого соединены с первыми выходами формирователя сигналов 33, вторые выходы которого соединены с выходами вторых фильтров нижних частот 46, входы которых соединены с соответствующими входами формирователя сигналов 33.
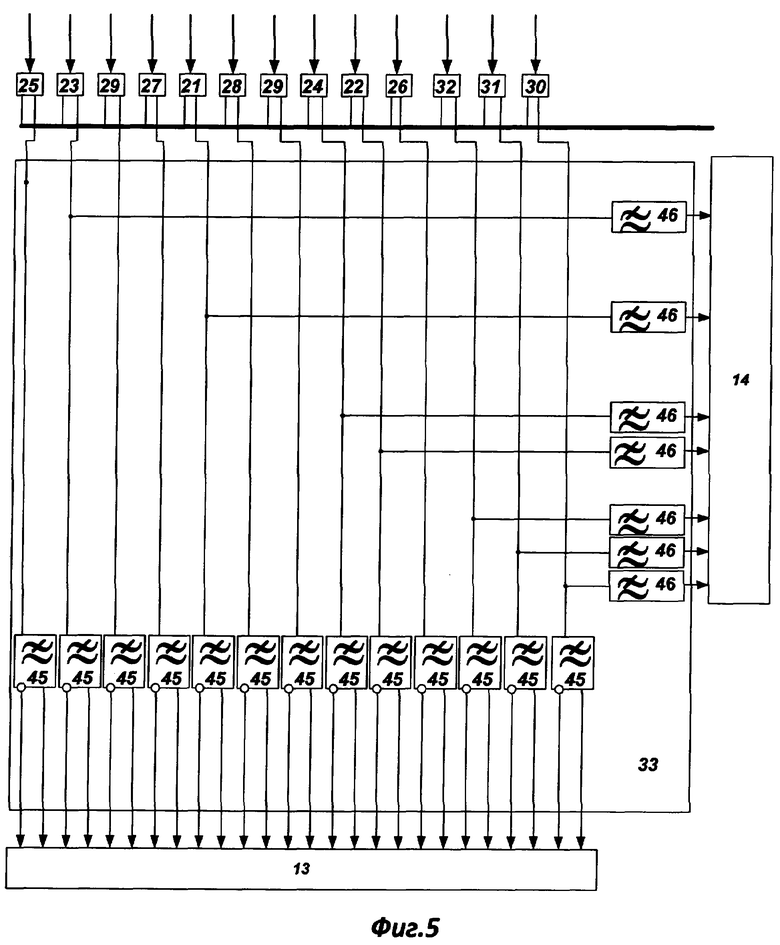
В формирователе сигналов 33, показанном на фиг.5, каждый вход соединен с входом соответствующего первого фильтра нижних частот 45, выходы которого соединены с первыми выходами формирователя сигналов 33, вторые выходы которого соединены с выходами вторых фильтров нижних частот 46, входы которых соединены с входами формирователя сигналов 33, соответствующих датчикам, которые использованы для защиты, например, датчикам вертикальной 2 и поперечной 3 абсолютной вибрации, которые установлены на подшипниках 7, а также с датчиками осевого сдвига 9-11.
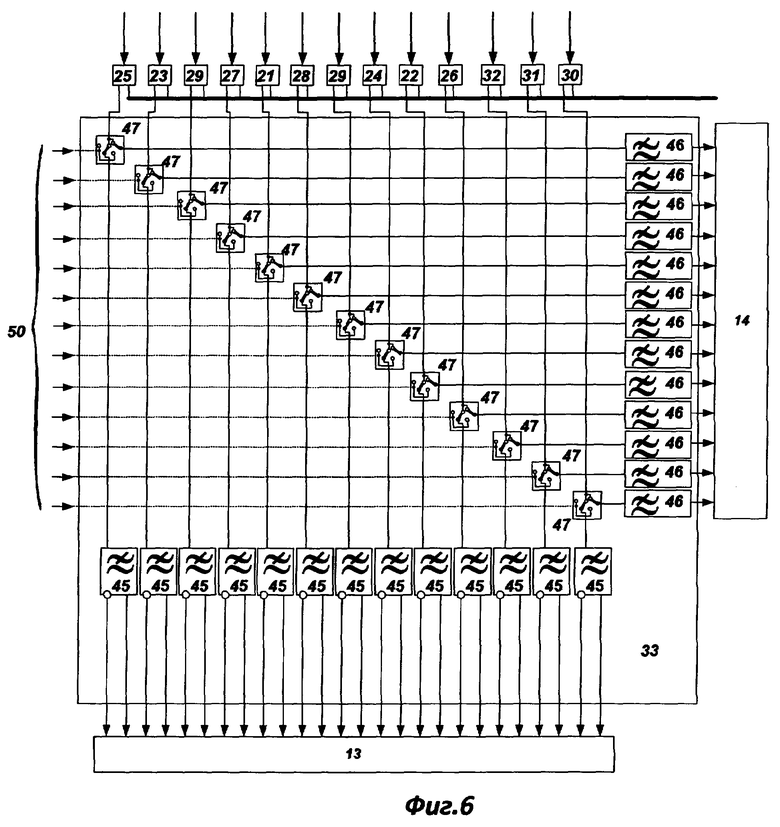
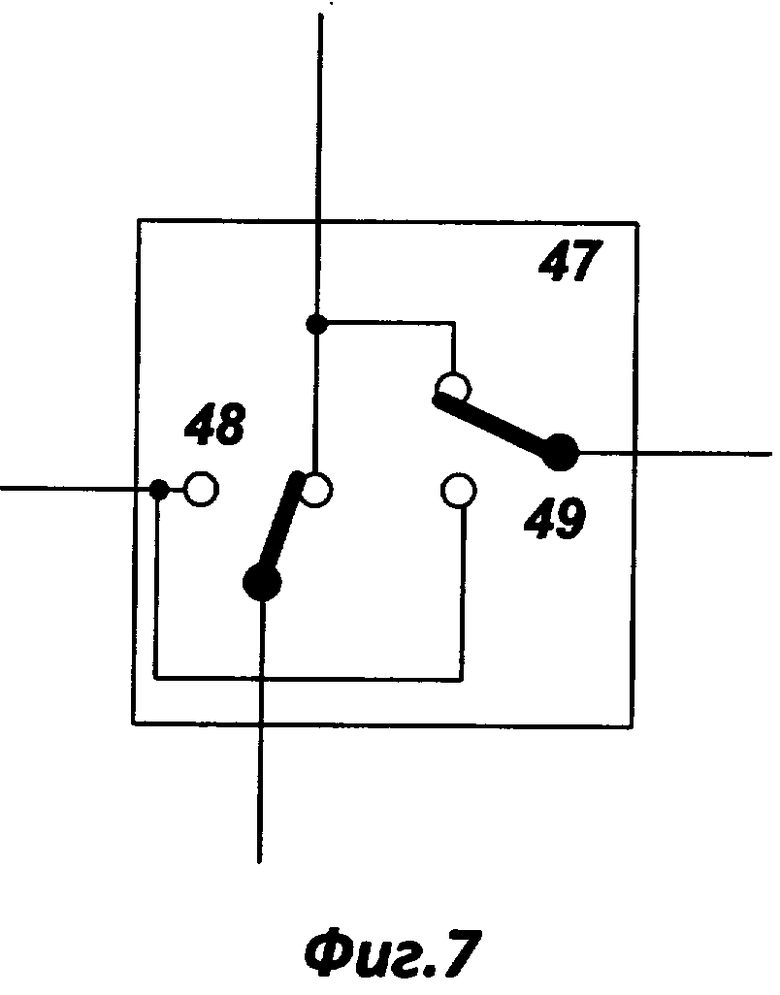
В формирователе сигналов 33, показанном на фиг.6, каждый вход соединен с входом соответствующего коммутирующего узла 47, структурная схема которого показана на фиг.7, и вход которого соединен с первыми контактами первого 48 и второго 49 коммутирующих элементов, переключающие контакты которых соединены с входами соответствующих первого 45 и второго 46 фильтра нижних частот, выходы которых соединены соответственно с первыми и вторыми выходами формирователя сигналов 33, а вторые входы коммутирующих элементов 48 и 49 каждого коммутирующего узла 47 соединены с дополнительными входами 50 формирователя сигналов 32.
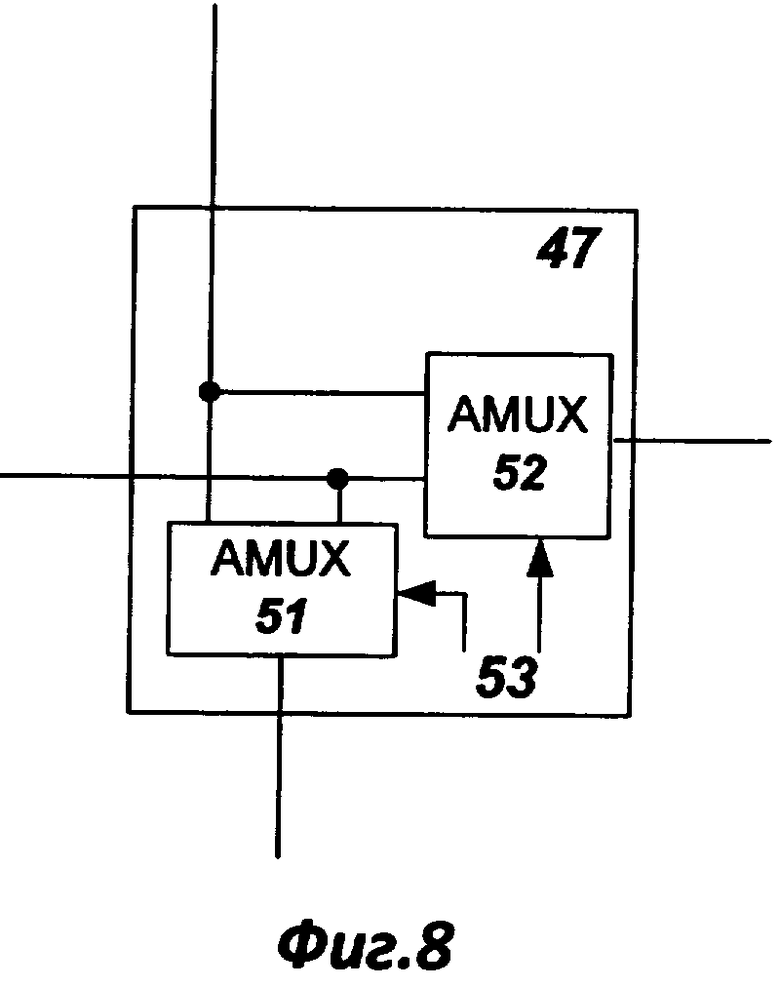
Коммутирующий узел 47, как показано на фиг.8, может также быть выполнен с использованием вместо коммутирующих элементов первого 51 и второго 52 аналоговых мультиплексоров, первые входы которых соединены с входом коммутирующего узла, вторые входы соединены с дополнительным входом, а выходы соответственно с первым и вторым выходами коммутирующего узла 47. На входе управления аналоговых мультиплексоров установлен код, обеспечивающий требуемую функцию коммутации.
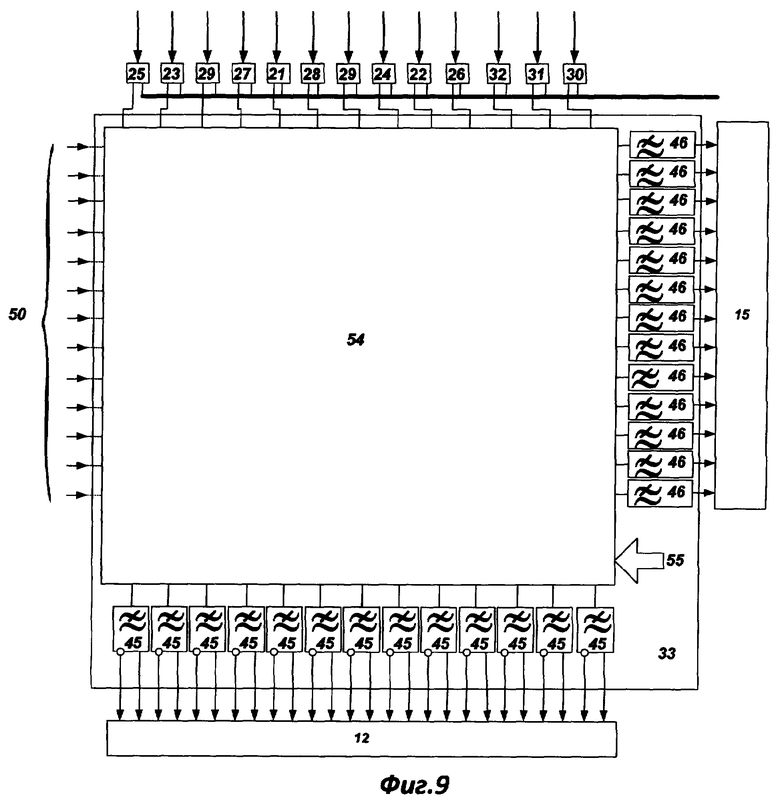
В формирователе сигналов 33, как показано на фиг.9, входы соединены с входами матричного аналогового коммутатора 54, первые и вторые выходы которого соединены с входами соответственно первых 45 и вторых 46 фильтров нижних частот, выходы которых соединены соответственно с первыми и вторыми выходами формирователя сигналов 33, дополнительные входы 50 которого соединены с дополнительными входами матричного аналогового коммутатора 54, управляющие входы которого соединены с шиной 55 управляющего кода.
Модуль логики защиты 38, как показано на фиг.10, содержит логический элемент И 56, входы которого являются входами модуля логики защиты, а выход является его выходом.
Как показано на фиг.11, логический элемент И 56 может быть реализован в виде элемента «монтажное И».
Модуль логики защиты 38, как показано на фиг.12, содержит логический элемент ИЛИ 57, входы которого являются входами модуля логики защиты 38, а выход является его выходом.
Как показано на фиг.13, логический элемент ИЛИ 57 может быть реализован в виде элемента «монтажное ИЛИ».
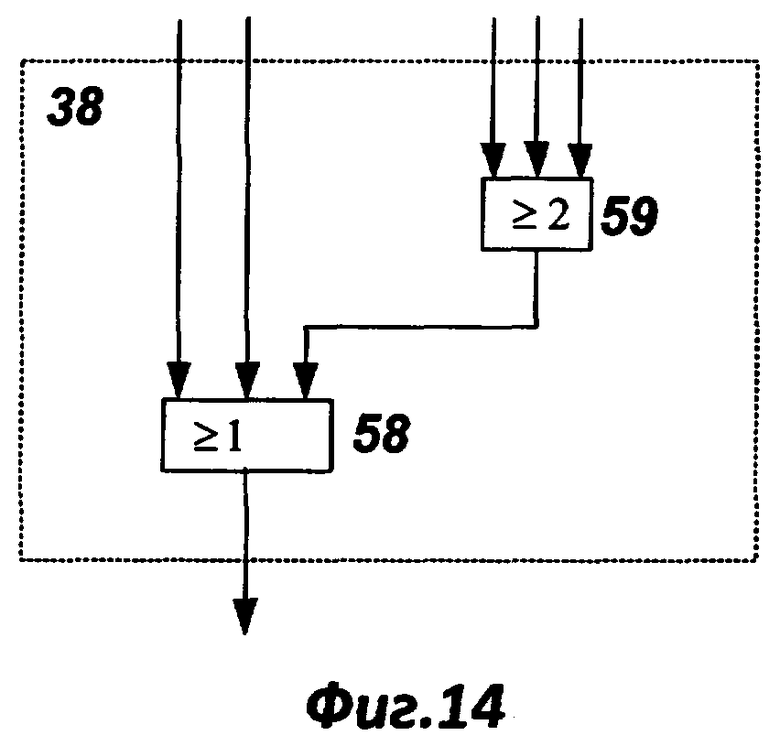
Модуль логики защиты 38, как показано на фиг.14, содержит логический элемент ИЛИ 58 и мажоритарный логический элемент 59, входы логического элемента ИЛИ 58 являются входами модуля логики защиты 38, а выход является его выходом, дополнительные входы модуля логики защиты 38 соединены с входами мажоритарного логического элемента 59, выход которого соединен с дополнительным входом логического элемента ИЛИ 58.
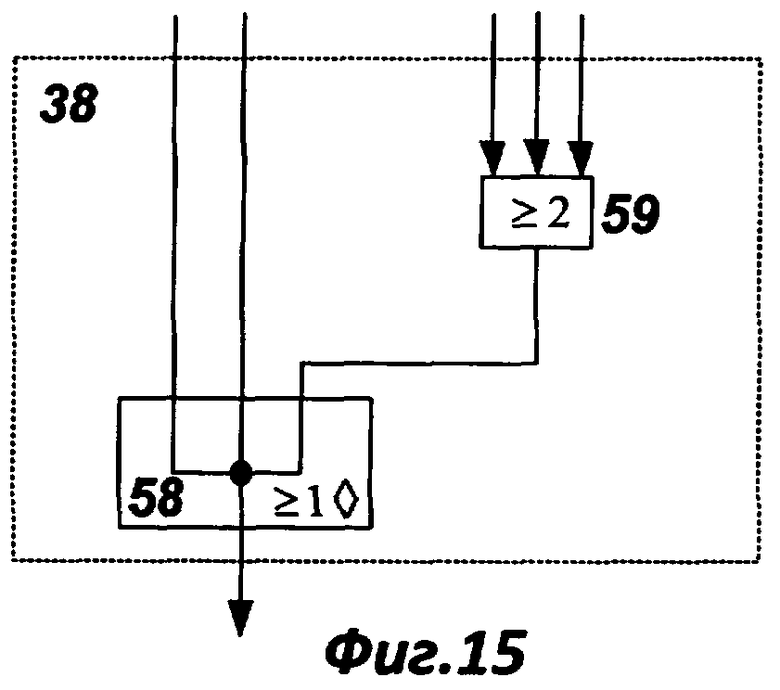
Как показано на фиг.15, логический элемент ИЛИ 58 может быть реализован в виде элемента «монтажное ИЛИ».
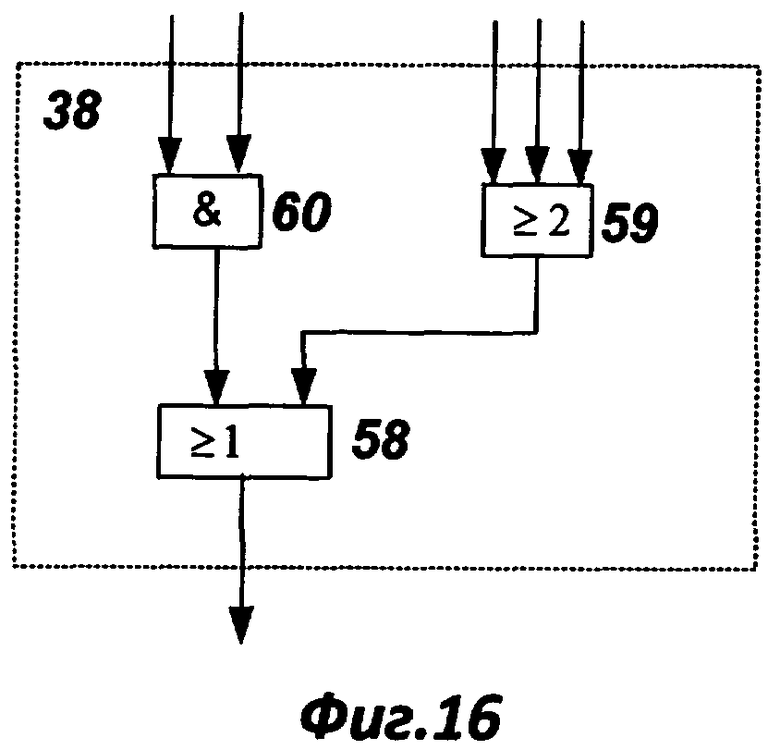
Модуль логики защиты 38, как показано на фиг.16, содержит логический элемент ИЛИ 58 и мажоритарный логический элемент 59 и логический элемент И 60, входы логического элемента И 60 являются входами модуля логики защиты 38, а выход соединен с первым входом логического элемента ИЛИ 58, выход которого является выходом модуля логики защиты 38, дополнительные входы модуля логики защиты 38 соединены с входами мажоритарного логического элемента 59, выход которого соединен с вторым входом логического элемента ИЛИ 58.
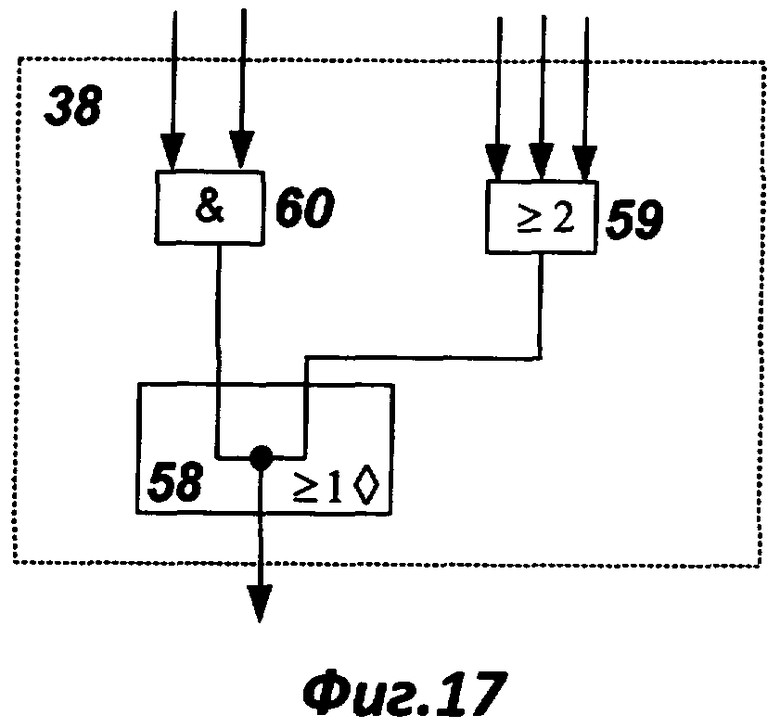
Как показано на фиг.17, логический элемент ИЛИ 58 при этом может быть реализован в виде элемента «монтажное ИЛИ».
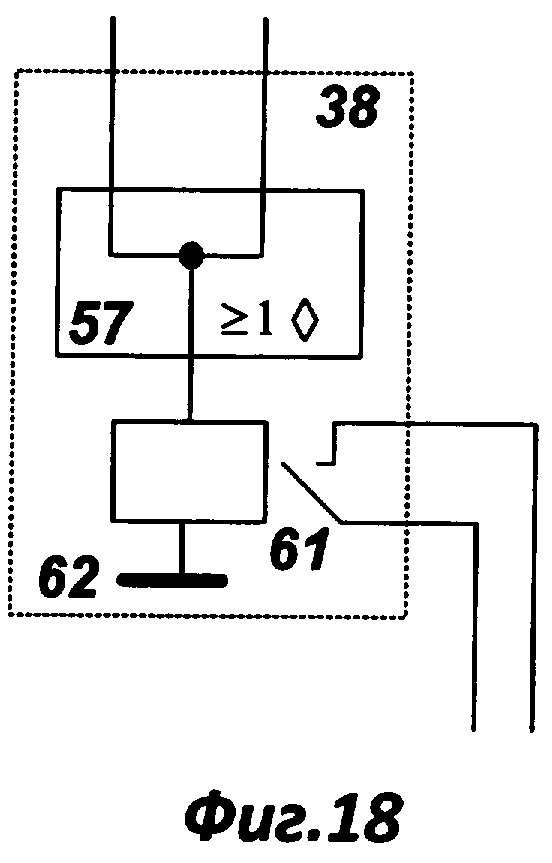
Как показано на фиг.18, в выходную цепь модуля логики защиты 38 может быть включен элемент гальванической развязки, например реле 61, первый вывод обмотки которого соединен с выходом логического элемента 57, а второй вывод обмотки соединен с шиной 62 питания реле 61, контакты которого являются выходами модуля логики защиты 38.
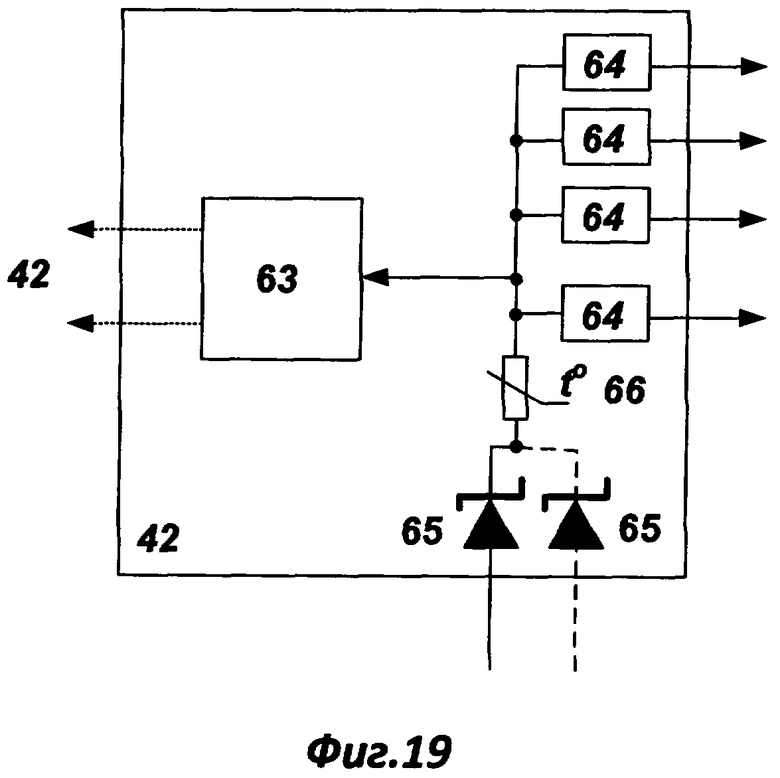
Модуль вторичного питания 42, как показано на фиг.19, содержит преобразователь напряжений 63, вход которого соединен с входами токоограничивающих элементов 64, выходы которых являются выходами модуля вторичного питания 42, входы которого через развязывающие диоды 65 и токоограничивающий элемент 66 соединены с входом преобразователя напряжений 63.
В качестве токоограничивающих элементов 64 могут быть использованы стабилизаторы напряжения с защитой от короткого замыкания.
В качестве токоограничивающих элементов 64 и 66 могут быть использованы самовосстанавливающиеся предохранители.
В качестве токоограничивающих элементов 64 могут быть использованы токоограничивающие диоды (current regulator diodes или current limited diodes).
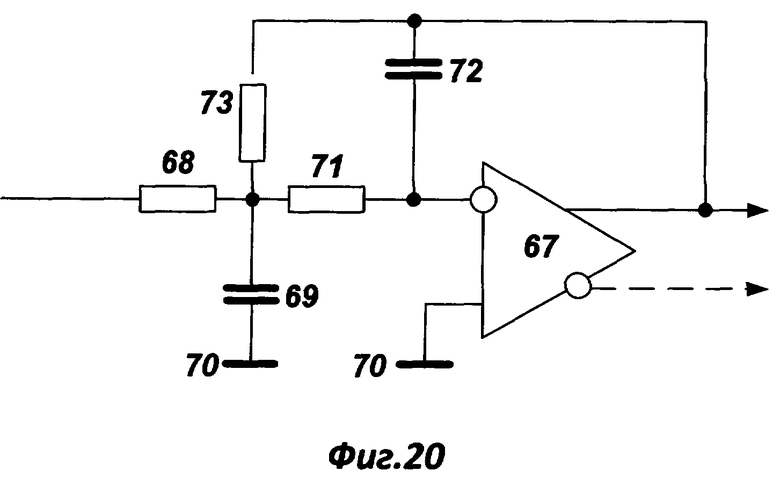
Фильтр нижних частот 45 или 46, как показано на фиг.20, содержит операционный усилитель 67, выход которого является выходом фильтра нижних частот, вход которого соединен через первый резистор 68 с первым выводом первого конденсатора 69, второй вывод которого соединен с общей шиной 70, которая соединена с прямым входом операционного усилителя 67, инверсный вход которого соединен через второй резистор 71 с первым выводом первого конденсатора 69, инверсный вход операционного усилителя соединен через второй конденсатор 72 с выходом операционного усилителя 67, который через третий резистор 73 соединен с первым выводом первого конденсатора 69.
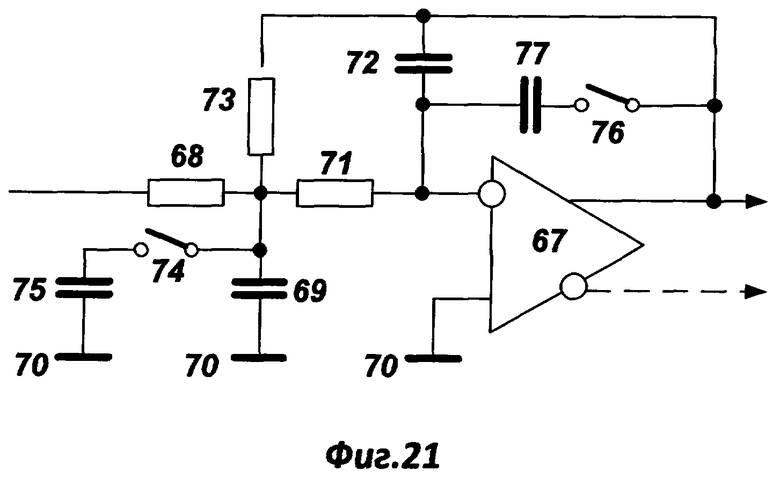
Фильтр нижних частот 45 или 46, как показано на фиг.21, содержит операционный усилитель 67, выход которого является выходом фильтра нижних частот, вход которого соединен через первый резистор 68 с первым выводом первого конденсатора 69, второй вывод которого соединен с общей шиной 70, которая соединена с прямым входом операционного усилителя 67, инверсный вход которого соединен через второй резистор 71 с первым выводом первого конденсатора 69, инверсный вход операционного усилителя 67 соединен через второй конденсатор 72 с выходом операционного усилителя 67, который через третий резистор 73 соединен с первым выводом первого конденсатора 69, который через первый коммутирующий элемент 74 соединен с первым выводом третьего конденсатора 75, второй вывод которого соединен с общей шиной 70, а выход операционного усилителя 67 соединен через второй коммутирующий элемент 76 с первым выводом четвертого конденсатора 77, второй вывод которого соединен с инвертирующим входом операционного усилителя 67.
Интегрирующие элементы 44 могут быть выполнены по структурным схемам, аналогичным схемам фильтров нижних частот, например по схеме, показанной на фиг.20. Отличие состоит в выборе номиналов элементов, обеспечивающих частоту начала спада амплитудно-частотой характеристики. Для фильтра нижних частот она должна быть выше верхней граничной частоты анализируемых сигналов, но ниже половины частоты квантования аналого-цифровых преобразователей, а для интегрирующего элемента частота начала спада ниже нижней граничной частоты анализируемых частот сигналов.
Интегрирующий элемент 44, схема которого показана на фиг.20, содержит операционный усилитель 67, выход которого является выходом интегрирующего элемента 44, вход которого соединен через первый резистор 68 с первым выводом первого конденсатора 69, второй вывод которого соединен с общей шиной 70, которая соединена с прямым входом операционного усилителя 67, инверсный вход которого соединен через второй резистор 71 с первым выводом первого конденсатора 69, инверсный вход операционного усилителя 67 соединен через второй конденсатор 72 с выходом операционного усилителя 67, который через третий резистор 73 соединен с первым выводом первого конденсатора 69.
Интегрирующий элемент 44, схема которого показана на фиг.21, содержит операционный усилитель 67, выход которого является выходом интегрирующего элемента 44, вход которого соединен через первый резистор 68 с первым выводом первого конденсатора 69, второй вывод которого соединен с общей шиной 70, которая соединена с прямым входом операционного усилителя 67, инверсный вход которого соединен через второй резистор 71 с первым выводом первого конденсатора 69, инверсный вход операционного усилителя 67 соединен через второй конденсатор 72 с выходом операционного усилителя 67, который через третий резистор 73 соединен с первым выводом первого конденсатора 69, который через первый коммутирующий элемент 74 соединен с первым выводом третьего конденсатора 75, второй вывод которого соединен с общей шиной 70, а выход операционного усилителя 67 соединен через второй коммутирующий элемент 76 с первым выводом четвертого конденсатора 77, второй вывод которого соединен с инверсным входом операционного усилителя 67.
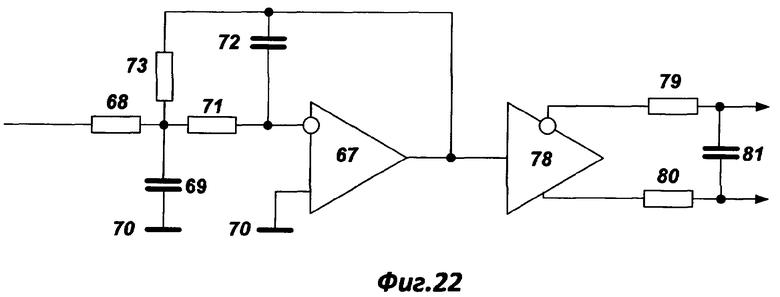
Для фильтров нижних частот или интегрирующих элементов, имеющих дифференциальные выходы, можно использовать схемы, показанные на фиг.20 и 21, при условии использования для их построения операционных усилителей 67 с дифференциальными выходами. Возможно также использование схемы, показанной на фиг.22, в которой выход операционного усилителя 67 соединен с входом формирователя дифференциального сигнала 78, инверсный и прямой выходы которого через первый 79 и второй 80 вспомогательные резисторы соединены с выходами фильтра (интегрирующего элемента), которые соединены между собой через вспомогательный конденсатор 81.
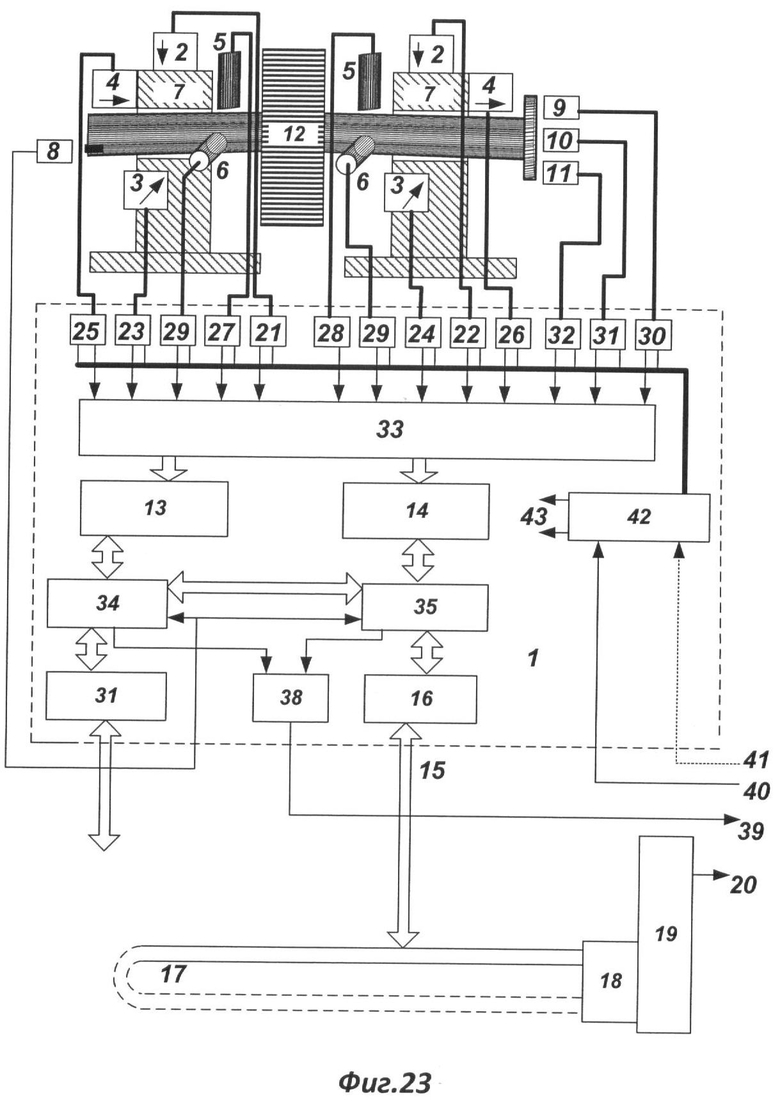
Во втором варианте, схема которого представлена на фиг.23, устройство вибрационного контроля содержит блок сбора и обработки данных 1, а также датчики 2-6 и 8-11. Блок сбора и обработки данных 1 содержит первый 13 аналого-цифровой преобразователь, выход которого соединен с входом ввода данных процессора обработки сигналов 34, выход которого соединен через цифровой интерфейс с входами микроконтроллера 35, вход ввода данных которого соединен с выходом второго аналого-цифрового преобразователя 14, а выход микроконтроллера 35 соединен через интерфейсный элемент 16 с асинхронной последовательной шиной 17, которая соединена с входом последовательного интерфейса 18 компьютера 19, выход которой является выходом 20 аварийного сигнала, а выходы датчиков 2-6 и 8-11 соединены с входами блока сбора и обработки данных 1. Входы блока сбора и обработки данных 1 соединены через согласующие элементы 21-32 с входами формирователя сигналов 33, выходы которого соединены с входами первого 13 и второго 14 аналого-цифровых преобразователей, входы синхронизации процессора обработки сигналов 34 и микроконтроллера 35 соединены с выходом датчика фазовой отметки 8, выход процессора обработки сигналов 34 соединен с входом дополнительного интерфейсного элемента 31, а логические выходы процессора обработки сигнала 34 и микроконтроллера 35 соединены с входами модуля логики защиты 38, выход которого является дополнительным выходом 39 аварийного сигнала, а шины 40 и 41 питания соединены с входами модуля вторичного питания 42, выходы которого соединены с входами питания согласующих элементов 21-32.
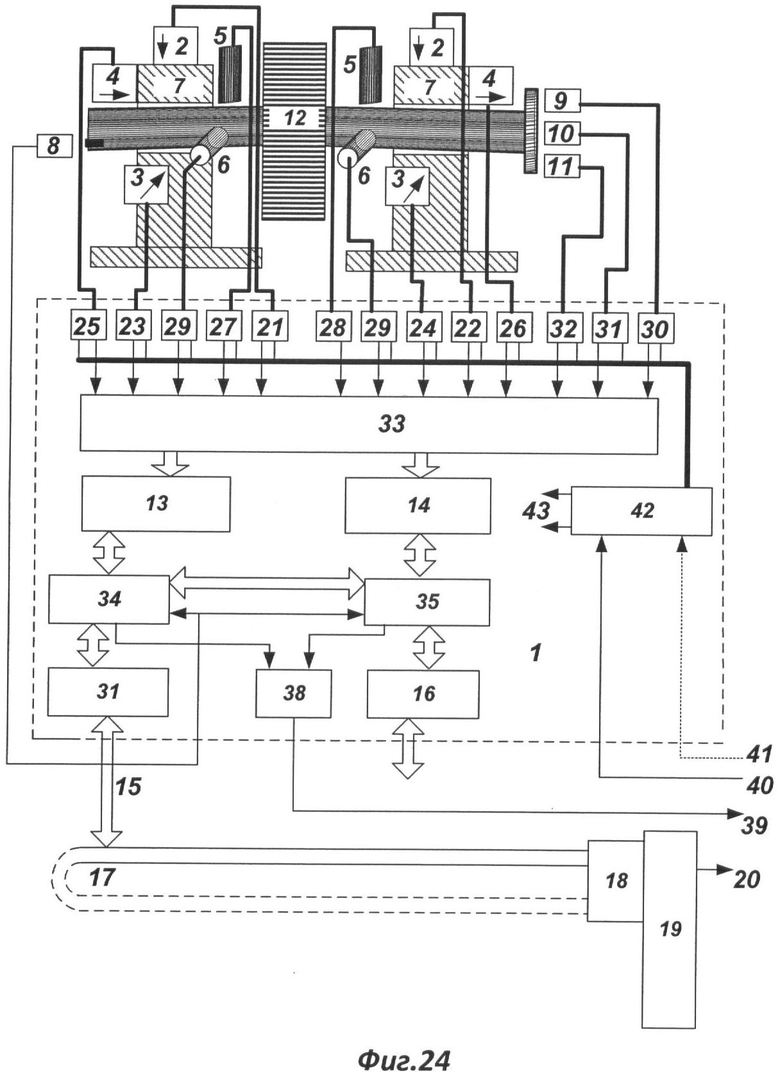
В третьем варианте, схема которого представлена на фиг.24, устройство вибрационного контроля содержит блок сбора и обработки данных 1, а также датчики 2-6 и 8-11. Блок сбора и обработки данных 1 содержит первый 13 аналого-цифровой преобразователь, выход которого соединен с входом ввода данных процессора обработки сигналов 34, выход которого соединен через цифровой интерфейс с входами микроконтроллера 35, вход ввода данных которого соединен с выходом второго аналого-цифрового преобразователя 14, выход микроконтроллера 35 соединен с входом интерфейсного элемента 16, асинхронная последовательная шина 17 соединена с входом последовательного интерфейса 18 компьютера 19, выход которой является выходом 20 аварийного сигнала, а выходы датчиков 2-6 и 9-11 соединены с входами блока сбора и обработки данных 1. Входы блока сбора и обработки данных 1 соединены через согласующие элементы 21-32 с входами формирователя сигналов 33, выходы которого соединены с входами первого 13 и второго 14 аналого-цифровых преобразователей, входы синхронизации процессора обработки сигналов 34 и микроконтроллера 35 соединены с выходам датчика фазовой отметки 8, выход процессора обработки сигналов 34 соединен через дополнительный интерфейсный элемент 31 с асинхронной последовательной шиной 17, логические выходы процессора обработки сигнала 34 и микроконтроллера 35 соединены с входами модуля логики защиты 38, выход которого является дополнительным выходом 39 аварийного сигнала, а шины 40 и 41 питания соединены с входами модуля вторичного питания 42, выходы которого соединены с входами питания согласующих элементов 21-32.
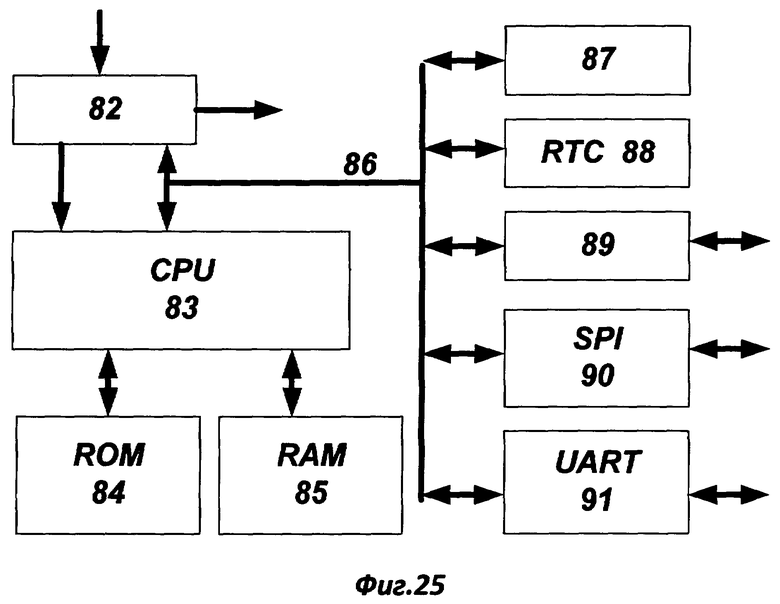
На фиг.25 показана упрощенная функциональная схема возможного варианта исполнения процессора обработки сигналов 34. Процессор обработки сигналов содержит формирователь питания 82, выход которого соединен с входом питания процессорного элемента 83, который соединен с элементом постоянной памяти 84 и оперативной памяти 85, а также с внутренней шиной 86, к которой подключены таймер 87, часы реального времени 88, интерфейс логических сигналов 89, синхронный последовательный интерфейс 90 и асинхронный последовательный интерфейс 91.
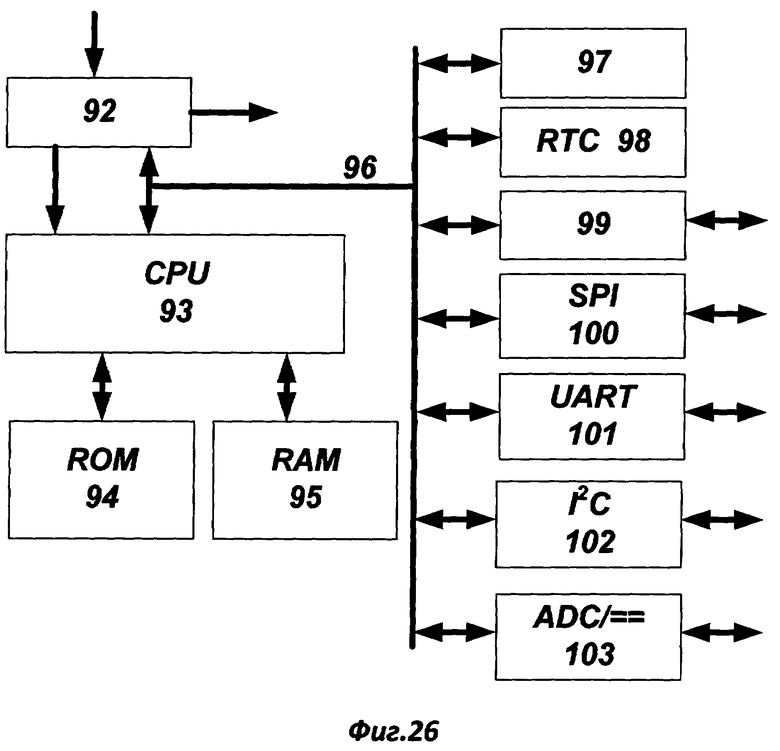
На фиг.26 показана упрощенная функциональная схема возможного варианта исполнения микроконтроллера 35. Микроконтроллер содержит формирователь питания 92, выход которого соединен с входом питания процессорного элемента 93, который соединен с элементом постоянной памяти 94 и оперативной памяти 95, а также с внутренней шиной 96, к которой подключены таймер 97, часы реального времени 98, интерфейс логических сигналов 99, синхронный последовательный интерфейс 100 и асинхронный последовательный интерфейс 101. В состав микроконтроллера также могут входить дополнительные интерфейсные элементы, например двухпроводного интерфейса 102 и аналоговых входов 103, которые соединены с внутренней шиной 96. Интерфейсный элемент аналоговых входов 103 может реализовать одно или многоканальный аналого-цифровой преобразователь и аналоговые входы компаратора сигналов, которые можно рассматривать как одноразрядные аналого-цифровые преобразователи.
Устройство вибрационного контроля работает следующим образом. На контролируемом агрегате на каждом подшипниковом узле 7 установлена группа датчиков. Например, на показанном на фиг.1 подшипниковом узле 7 установлены датчики вертикальной вибрации подшипника 2, поперечной вибрации подшипника 3, осевой вибрации подшипника 4, вертикальной вибрации вала 5 и горизонтальной вибрации вала 6. В качестве датчиков вибрации подшипника могут быть использованы, например, акселерометры или велосиметры, а в качестве датчиков вибрации вала - токовихревые проксиметры. Кроме указанных датчиков на агрегате могут быть установлены и другие датчики, например датчик фазовой отметки 8 и датчики осевого сдвига 9-11. Набор датчиков может быть различным в зависимости от объема контроля. При движении ротора 12 датчики формируют электрические сигналы, которые поступают на соответствующие согласующие узлы 21-32, которые преобразуют сигналы от датчиков в нормированные сигналы, пропорциональные текущему значению контролируемой механической величины. Например, для пьезоэлектрических акселерометров согласующий узел может быть выполнен в виде усилителя заряда или напряжения.
Согласующие узлы в некоторых случаях могут быть конструктивно объединены с соответствующими датчиками (датчики с встроенной электроникой), что позволяет снизить требования к линиям передачи сигналов от датчиков к измерительному блоку, но может ограничить, например, температурный диапазон, в котором работает датчик. В случае использования датчиков с встроенной электроникой согласующие узлы 21-32 выполняют функции интерфейсных схем согласования выходного интерфейса датчика и входами по напряжению формирователя сигналов 33, например, реализуют интерфейс для датчиков с интерфейсом IEPE или TEDS.
Нормированные выходные сигналы от согласующих узлов 25-31 блока сбора и обработки данных 1 поступают на через формирователь сигналов 33 на входы первого 13 и второго 14 аналого-цифровых преобразователей.
Сигналы с выходов аналого-цифровых преобразователей 13 и 14 поступают на процессор обработки сигналов 34 и микроконтроллер 35.
При контроле вибрационного состояния агрегата обычно решаются две задачи. Первая задача состоит в выявлении зарождающихся дефектов на ранней стадии их появления. Данная задача требует обработки вибрационных сигналов в широком диапазоне частот и в большом динамическом диапазоне. Для этого необходимо использовать аналого-цифровой преобразователь высокой разрядности и процессор обработки сигналов, который в реальном масштабе времени может реализовать требуемые диагностические алгоритмы. Вторая задача вибрационного контроля состоит в реализации функции оперативной защиты агрегата от повышенной вибрации. Данная задача, с точки зрения обработки сигналов, требует существенно меньшей производительности процессорного элемента и может быть реализована на микроконтроллере, который работает с более простой программой и, следовательно, более устойчив к возможным программным сбоям. В предлагаемом устройстве вычисления, связанные с диагностикой, реализуются процессором обработки сигналов 34.
Одновременно этот процессор формирует оценки параметров вибрации, положенных в основу алгоритма защиты. Например, определяется значение среднеквадратического уровня виброскорости и сравнение с пороговыми значения в полосе 10-1000 Гц. Для турбоагрегатов, например в качестве пороговых, уровни могут быть выбраны в соответствии с требованиями стандартов значения уровня ПРЕДУПРЕЖДЕНИЯ 7,2 мм/сек и уровня АВАРИИ 11,2 мм/сек. Если в качестве логики защиты принято достижение вибрации уровня АВАРИИ по одному из каналов, соответствующий сигнал формируется на логическом выходе процессора обработки сигналов и передается им через интерфейсный элемент 31 и шину 36 в компьютер 19. Если использован другой алгоритм формирования сигналов защитного отключения, например достижение по одному из каналов уровня вибрации уровня АВАРИИ с подтверждением этого уровня достижением уровня ПРЕДУПРЕЖДЕНИЕ на других каналах измерения вибрации этого или соседних подшипников, процессор обработки сигналов проводит соответствующие сравнения и формирует на своем логическом выходе сигнал защитного останова, и передает соответствующее сообщение в компьютер 19. Использование алгоритмов с подтверждением повышает достоверность формирования сигнала защитного останова и снижает риск ложных срабатываний защиты. Аналогичные алгоритмы защиты реализуются и в микроконтроллере 35, который также на своем логическом выходе формирует сигнал защитного останова и параллельно через интерфейсный модуль 16 передает информацию о необходимости защитного отключения в компьютер 19. Поскольку как процессор обработки сигналов 34, так и микроконтроллер 35 получают сигналы как от датчиков, установленных на «своем подшипнике», так и от датчиков, остановленных на соседнем подшипнике, процессор обработки сигналов 34 и микроконтроллер 35 реализуют параллельно указанные алгоритмы логики защиты. Реализация алгоритмов ранней диагностики не предъявляет жестких требований к постоянной исправности, поскольку ранняя диагностика не включается в автоматическую защиту агрегата с его быстрым неплановым остановом. Таким образом, даже если и произойдет сбой в работе процессора обработки сигналов 34, это может быть выявлено средствами программной самодиагностики и устранено обслуживающим персоналом. В предлагаемой системе алгоритмы защиты, которые должны автоматически остановить агрегат, параллельно реализуются как в процессоре обработки сигналов 34, так и в микроконтроллере 35, причем обеспечивается резервирование выполнения этого алгоритма. Кроме того, поскольку информация об уровнях сигналов передается в компьютер по дублированным каналам связи 17 и 36, в компьютере также обеспечивается реализация этого алгоритма и на выходе 20 компьютера 19 формируется сигнал защитного отключения агрегата. Параллельно сигналы с логических выходов процессора обработки сигналов 34 и микроконтроллера 35 поступают на входы модуля логики защиты 38, который сравнивает эти сигналы и формирует на своем выходе аппаратный сигнал защитного отключения на выходе 39, который дублирует сигнал на выходе 20 компьютера 19. Таким образом достигается высокая достоверность определения аварийной ситуации при высокой отказоустойчивости системы. Например, если в измерительном блоке откажет аналого-цифровой преобразователь 13 и/или процессор обработки сигналов 34, информация с датчиков соответствующего подшипника через другой аналого-цифровой преобразователь 14 и микроконтроллер 35 в случае опасной ситуации может обеспечить формирование сигнала защитного останова. Аналогично устройство может обеспечить формирование сигнала защитного отключения в случае отказа второго аналого-цифрового преобразователя 14 и/или микроконтроллера 35, а также в случае отказа компьютера 19.
Наличие параллельной передачи сообщений от блока сбора и обработки данных в компьютер об аварийной ситуации по шинам 36 и 17 позволяет дублировать формирование сигнала защитного отключения, что повышает достоверность формирования сигнала защитного отключения. Аналогично сигнал защитного отключения дублируется на выходах 20 и 39. При этом даже полный отказ обмена по одной из шин передачи данных 17 или 36, а также по одному из выходов 20 или 39, не нарушает работоспособности, связанной с защитой агрегата. Для еще большей устойчивости к обрывам шин передачи данных 17 и 36 эти шины могут быть выполнены в виде кольцевых структур, подключаемых к соответствующим парам входов компьютера 19.
Питание измерительных блоков может быть выполнено по независимой одиночной 40 или резервированной 40 и 41 шине питания. Это питание поступает на вторичный узел питания 42 блока сбора и обработки данных 1, который формирует питание для элементов и узлов данного блока на выходах 43, а также для питания согласующих узлов 21-32.
Формирователь сигналов для каждого канала должен для исключения эффекта перекрытия содержать фильтр нижних частот с частотой среза f2 ниже половины частоты fв выборок аналого-цифровых преобразователей:
При этом, поскольку частотный диапазон сигналов для целей диагностирования может быть более широким, частоты выборок для первого и второго аналого-цифровых преобразователей могут быть различными. В этом случае для каждого измерительного канала сигнал пропускается на вход соответствующего аналого-цифрового преобразователя через фильтры, соответствующие частотам выборок этих аналого-цифровых преобразователей.
В зависимости от типов используемых датчиков реализация формирователей сигналов может быть различной. Для снижения требований к вычислительной производительности микроконтроллера и получения более широкого динамического диапазона желательно на его вход подавать сигнал виброскорости. Если соответствующий датчик является датчиком виброскорости, сигнал может быть передан на аналого-цифровой преобразователь через фильтр нижних частот 45, который выполняет функции антиалайзингового фильтра. Если датчики формируют сигналы, пропорциональные ускорению, может потребоваться предварительное интегрирование сигнала интегрирующим элементом 44. При этом, в зависимости от особенностей агрегата и сложности алгоритмов обработки, на процессор обработки сигналов от датчика ускорений может передаваться сигнал без интегрирования (фиг.2) или с предварительным аналоговым интегрированием (фиг.3). Во втором случае может быть обеспечен более широкий динамический диапазон, но снижаются возможности анализа высокочастотных составляющих, что ограничивает возможности применения алгоритмов диагностики, связанных с анализом сигналов виброускорения. Если на вход аналого-цифрового преобразователя 13 поступает сигнал виброускорения, интегрирование сигнала может быть выполнено процессором обработки сигналов 34 цифровыми методами, что повышает требования к разрядности использованного аналого-цифрового преобразователя 13. Для аналого-цифрового преобразователя 14 и микроконтроллера 35 формирователь сигналов формирует входной сигнал виброскорости в стандартной полосе частот, обеспечивающей защиту агрегата, например 10-1000 Гц. Это позволяет получить оценки уровня среднеквадратического значения виброскорости, используемой для получения оценки допустимого уровня вибрации:
где Vi - выборки входного сигнала виброскорости от датчика, установленного на подшипнике.
Логические сигналы, получаемые в результате сравнения уровня среднеквадратического значения виброскорости с пороговыми значениями ПРЕДУПРЕЖДЕНИЯ VП и АВАРИИ VA:

Если Пij, где i=1, 2, определяет номер подшипника, j=B или П определяет соответственно вертикальное или поперечное направление контролируемой вибрации, соответствует логическим сигналам превышения уровня ПРЕДУПРЕЖДЕНИЯ, а Аij соответственно превышения уровня АВАРИИ, логическое выражение формирования сигнала защитного отключения имеет вид:

В данном выражении знаки точка (умножение) и плюс соотвествуют логическим операциям И и ИЛИ соответственно.
Выражение (1.5) соответствует срабатыванию защиты при появлении сигнала АВАРИЯ, подтверждаемого сигналом ПРЕДУПРЕЖДЕНИЕ. Аналогичным образом может быть реализован алгоритм срабатывания при достижении в одном из каналов сигнала уровня АВАРИЯ с подтверждением другим сигналом АВАРИЯ на данном подшипниковом узле, но по другому направлению, или сигналом АВАРИЯ на соседнем подшипнике:

Как фильтр нижних частот, так и интегрирующий элемент могут быть выполнены по схемам, показанным на фиг.20-22. В зависимости от номиналов используемых компонентов амплитудно-частотные характеристики могут иметь вид, показанный на фиг.27. Изменение, например, величины емкости позволяет реализовать фильтр нижних частот с частотой среза f2, интегратор для частот от f1 до f2 или двойной интегратор для частот выше f1. Величина емкости может быть выбрана постоянной, как на фиг.20, или изменяться за счет подключения дополнительных емкостей 75 и 77, как на фиг.21, что позволяет настроиться на реализацию требуемой функции. При использовании в качестве датчиков акселерометров реализация двойного интегрирования позволяет перейти к виброперемещениям и реализовать защиту по достижении максимально допустимого уровня виброперемещения, если это принято для данного типа агрегатов, например гидроагрегатов.
Показанную на фиг.22 схему с дифференциальным выходом целесообразно использовать, если в предлагаемом устройстве используются аналого-цифровые преобразователи с дифференциальными входами.
Использование единых схемотехнических решений для реализации фильтров нижних частот и интеграторов позволяет реализовать формирователь в виде матричной структуры, как показано на фиг.4. Для данного варианта исполнения сигналы от всех датчиков поступают как на первый 13, так и на второй 14 аналого-цифровые преобразователи. При большом количестве каналов на второй аналого-цифровой преобразователь могут поступать сигналы только от тех датчиков, которые задействованы в защите агрегата, например от датчиков вертикальной и поперечной вибрации подшипников и от датчиков осевого сдвига, как показано на фиг.5.
Формирователь сигналов 33, показанный на фиг.6, позволяет коммутировать подключение входов к входам фильтров нижних частот за счет использования коммутационных элементов 47, реализуемых с использованием механических коммутационных элементов, как показано на фиг.7, или аналоговых мультиплексоров, как показано на фиг.8. Это позволяет не только настраивать устройство на заданную конфигурацию входов, но и использовать дополнительные входы 50 для подачи тестовых сигналов проверки, а также для вывода на эти входы сигналов от датчиков для подключения дополнительной анализирующей аппаратуры. Данный эффект может быть обеспечен и за счет использования для межсоединений входов формирователя сигналов 33 с входами фильтров нижних частот 45, 46 матричного аналогового коммутатора 54, как показано на фиг.9. Настройка аналогового матричного коммутатора может быть фиксированной за счет подачи на его входы управления 55 постоянного кода или программируемой от шины управления, которая подключена к входам управления 55.
Формирование логики защитного отключения, например, в соответствии с выражением (1.5) для вибрации подшипников или в виде мажоритарной функции превышений максимально допустимого осевого сдвига для датчиков осевого сдвига 9-11 выполняется параллельно процессором обработки сигналов 34 и микроконтроллером 35. Формируемые при этом на их выходах логические сигналы поступают на входы модуля логики защиты 38. Этот модуль может реализовать сравнение логических сигналов с его входов по логике И, как показано на фиг.10 или 11. Реализация логики И снижает вероятность ложного отключения, поскольку для срабатывания защиты сигналы с выходов процессора обработки сигналов 35 и микроконтроллера 29 должны совпасть.
В случае реализации логики ИЛИ достаточно появления только одного логического сигнала, или с выхода процессора обработки сигнала или с выхода микроконтроллера 29. Это обеспечивает срабатывание защиты с повышенной надежностью, например, когда в случае опасной ситуации разрушение может повлечь серьезные материальные потери или создает угрозу персоналу. Реализация модуля логики защиты в виде «монтажного И» или «монтажного ИЛИ», как показано на фиг.11 или 13, позволяет получить высокую надежность модуля логики защиты.
Для случая защиты по превышению максимально допустимого уровня осевого сдвига в модуле логики защиты может быть реализовано формирование мажоритарного сравнения сигналов, получаемых от трех датчиков 9-11, с использованием схем модуля логики защиты, показанных на фиг.14-17.
В выходной цепи модуля логики защиты может быть включено механическое или оптронное реле. На фиг.18 показано подключение к выходу элемента 57 «монтажное ИЛИ» обмотки реле 61, которое срабатывает при появлении на входе модуля логического сигнала единицы, который, проходя через обмотку на общую шину 62, вызывает срабатывание реле. При таком выполнении выходной цепи обеспечивается гальваническая развязка цепи включения защитного отключения агрегата и возможно непосредственное запараллеливание с аналогичным выходом 20, если там использовано аналогичное техническое решение.
Для того чтобы возникновение короткого замыкания не вызвало нарушений работы в других блоках из-за перегрузки шин питания, во вторичном узле питания 42 предусмотрены элементы 63, 64 и 66, ограничивающие ток. В качестве таких элементов могут быть использованы электронные компоненты различного вида. Например, для питания внутренних цепей блока 1 в качестве элемента 63 целесообразно использовать линейные или импульсные стабилизаторы напряжения с защитой от короткого замыкания по выходу. Для ограничения общего тока потребления от основной 40 и резервной 41 шины питания может быть использован самовосстанавливающийся предохранитель 66. Элементы 65 при этом обеспечивают взаимную развязку основной 40 и резервной 41 шины питания. Питание согласующих узлов, а через них и датчиков, если последние требуют использования внешнего питания, выполняется по независимым шинам через токоограничивающие элементы 64, в качестве которых могут быть использованы как электронные, так и термочувствительные самовосстанавливающиеся предохранители, а также другие ограничительные элементы, например токоограничивающие диоды (current regulator diodes).
Высокая надежность срабатывания защиты по осевому сдвигу обеспечивается использованием трех независимых датчиков 9-11 с соответствующими согласующими элементами 30-32, с последующей обработкой дублирующими фильтрами 45 и 46, аналого-цифровыми преобразователями 13 и 14 и соответственно процессором обработки сигналов 34 и микроконтроллером 35. Питание согласующих элементов 30-32 и соответствующих датчиков 9-11 выполняется по независимым шинам питания с выходов через элементы 64 модуля вторичного питания 42, который питается от резервированных шин питания 40 и 41.
Синхронизация работы измерительных блоков выполняется по сигналам от датчика фазовой отметки 8. В качестве такого датчика могут быть использованы датчики метки начального положения вала или фазовой отметки типа ключ-проксиметр емкостного, вихретокового или индукционного типа или датчика Холла.
Выполнение устройства по второму или третьему варианту исполнения отличается организацией шины асинхронной передачи данных в компьютер 19. Если в первом варианте исполнения данные передаются параллельно по шинам 17 и 36, во втором и третьем вариантах выполения возможна передача данных и только по одной из этих шин - по шине 17, как показано на фиг.23, с выхода микроконтроллера 35 через интерфейсный элемент 16 или с выхода процессора обработки сигналов 34 через интерфейсный элемент 31, как показано на фиг.24. В качестве протокола передачи данных может быть использован любой, обеспечивающий достаточную скорость передачи данных и исключающий их потерю RS-485, CAN, Ethernet и т.п. При использовании протоколов CAN или Ethernet возможна организация кольцевых структур, устойчивых к обрывам линий передачи данных.
Сравнение упрощенных структурных схем процессора обработки сигналов, показанных на фиг.25, и микроконтроллера, показанного на фиг.26, позволяет сделать вывод о том, что данные элементы близки по своей структуре и отличаются периферийными интерфейсами и внутренними особенностями процессорных элементов 83 и 93. При возможности получения требуемой производительности процессорных элементов 83 и 93 и набора интерфейсов возможна их взаимная замена, поскольку они обладают постоянной 84 и 94, оперативной 85 и 95 памятью, интерфейсами последовательного обмена 91 и 101, интерфейсами ввода-вывода логических сигналов 89 и 99.
Таким образом, в качестве микроконтроллера 35 в измерительных блоках возможно использование процессора обработки, аналогичного процессору обработки сигналов 34. Аналогично, вместо процессора обработки сигналов возможно использование микроконтроллера с мощным центральным процессорным элементом, например с аппаратным умножителем и аккумулятором для быстрого выполнения операций обработки сигналов.
Использование в предлагаемом устройстве многоканального измерительного блока с резервированной обработкой данных от групп датчиков, устанавливаемого на соседних подшипниках, и сравнение логических сигналов, свидетельствующих о необходимости защитного отключения агрегата при превышении допустимых уровней вибрации или их сочетании в соответствии с заданным алгоритмом, что обеспечивается наличием дублирования обработки в измерительном блоке как на уровне аналоговых сигналов, так и на уровне логических сигналов, а также дублирование каналов передачи данных в компьютерную систему и параллельное формирование сигналов защитного отключения агрегата как на уровне блока сбора и обработки данных, так и на уровне компьютера, позволяет существенно повысить надежность и достоверность формирования таких сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО КОНТРОЛЯ (ВАРИАНТЫ) | 2008 |
|
RU2376564C1 |
| СИСТЕМА ВИБРАЦИОННОГО КОНТРОЛЯ | 2008 |
|
RU2371695C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЗАЩИТЫ | 2005 |
|
RU2344532C2 |
| СПОСОБ И УСТРОЙСТВО ЗАЩИТЫ ПОДВИЖНОГО ОБЪЕКТА НАЗЕМНОЙ ВОЕННОЙ ТЕХНИКИ | 2014 |
|
RU2554903C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ (ВАРИАНТЫ) | 2008 |
|
RU2382368C1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО СБОРА ДАННЫХ ДЛЯ ДАТЧИКОВ С ДВУХПРОВОДНЫМ ИНТЕРФЕЙСОМ (ВАРИАНТЫ) | 2008 |
|
RU2401419C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| Устройство для контроля работы пневматической сеялки | 1991 |
|
SU1782392A1 |
| ПОРТАТИВНАЯ КОРОТКОВОЛНОВАЯ - УЛЬТРАКОРОТКОВОЛНОВАЯ РАДИОСТАНЦИЯ | 2023 |
|
RU2823629C1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ГАЛЬВАНИЧЕСКИХ ВАНН | 1998 |
|
RU2135647C1 |


Изобретение относится к устройствам вибрационного контроля и защиты роторных агрегатов, таких, например, как турбины. Техническим результатом изобретения является повышение надежности и достоверности функционирования. Устройство вибрационного контроля содержит блок сбора и обработки данных 1, датчики 2-6, установленные на подшипниковых узлах 7, а также датчики фазовой отметки 8 и осевого сдвига 9-11 ротора 12, первый 13 и второй 14 аналого-цифровые преобразователи, асинхронный интерфейс 16, шину передачи данных 17, входной интерфейс 18, компьютер 19, выход 20 которого является выходом сигнала защитного отключения агрегата, согласующие элементы 21-32, формирователь сигналов 33, процессор обработки сигналов 34, микроконтроллер 35, дополнительную асинхронную последовательную шину 36, дополнительнй входной интерфейс 37, модуль логики защиты 38, выход которого является дополнительным выходом 39 аварийною сигнала. Шины 40 и 41 питания соединены с входами модуля вторичного питания 42, выходы которого соединены с входами питания согласующих элементов 21-32, а дополнительные выходы 43 являются шинами питания блока сбора и обработки данных 1. 3 н. и 22 з.п. ф-лы, 27 ил.
1. Устройство вибрационного контроля, содержащее датчики, а также блок сбора и обработки данных, который содержит первый аналого-цифровой преобразователь, выход которого соединен с входом ввода данных процессора обработки сигналов, выход которого соединен через цифровой интерфейс с входами микроконтроллера, вход ввода данных которого соединен с выходом второго аналого-цифрового преобразователя, а выход микроконтроллера соединен через интерфейсный элемент с асинхронной последовательной шиной, которая соединена с входом последовательного интерфейса компьютера, выход которого является выходом аварийного сигнала, а выходы датчиков соединены с входами блока сбора и обработки данных, отличающееся тем, что, с целью повышения надежности и достоверности функционирования, входы блока сбора и обработки данных соединены через согласующие элементы с входами формирователя сигналов, выходы которого соединены с входами первого и второго аналого-цифровых преобразователей, входы синхронизации процессора обработки сигналов и микроконтроллера соединены с выходам датчика фазовой отметки, выход процессора обработки сигналов соединен через дополнительный интерфейсный элемент с дополнительной асинхронной последовательной шиной, которая соединена с дополнительным входом последовательного интерфейса компьютера, логические выходы процессора обработки сигнала и микроконтроллера соединены с входами модуля логики защиты, выход которого является дополнительным выходом аварийного сигнала, а шины питания соединены с входами модуля вторичного питания, выходы которого соединены с входами питания согласующих элементов.
2. Устройство вибрационного контроля по п.1, отличающееся тем, что второй аналого-цифровой преобразователь интегрирован с микроконтроллером.
3. Устройство вибрационного контроля по п.1, отличающееся тем, что в формирователе сигналов каждый вход соединен с входом интегрирующего элемента и с входом первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с выходами соответствующих интегрирующих элементов.
4. Устройство вибрационного контроля по п.1, отличающееся тем, что в формирователе сигналов каждый вход соединен с входом интегрирующего элемента, выход которого соединен с входом первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с выходами соответствующих интегрирующих элементов.
5. Устройство вибрационного контроля по п.1, отличающееся тем, что в формирователе сигналов каждый вход соединен с входом соответствующего первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с соответствующими входами формирователя сигналов.
6. Устройство вибрационного контроля по п.1, отличающееся тем, что в формирователе сигналов каждый вход соединен с входом соответствующего первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с входами формирователя сигналов, соответствующих датчикам, которые использованы для защиты.
7. Устройство вибрационного контроля по п.1, отличающееся тем, что в формирователе сигналов каждый вход соединен с входом соответствующего коммутирующего узла, который соединен с первыми контактами первого и второго коммутирующих элементов, переключающие контакты которых соединены с входами соответствующих первого и второго фильтра нижних частот, выходы которых соединены соответственно с первыми и вторыми выходами формирователя сигналов, а вторые входы коммутирующих элементов каждого коммутирующего узла соединены с дополнительными входами формирователя сигналов.
8. Устройство вибрационного контроля по п.1, отличающееся тем, что в формирователе сигналов входы соединены с входами матричного аналогового коммутатора, первые и вторые выходы которого соединены с входами соответственно первых и вторых фильтров нижних частот, выходы которых соединены соответственно с первыми и вторыми выходами формирователя сигналов, дополнительные входы которого соединены с дополнительными входами матричного аналогового коммутатора, управляющие входы которого соединены с шиной управляющего кода.
9. Устройство вибрационного контроля по п.1, отличающееся тем, что модуль логики защиты содержит логический элемент И, входы которого являются входами модуля логики защиты, а выход является его выходом.
10. Устройство вибрационного контроля по п.1, отличающееся тем, что модуль логики защиты содержит логический элемент ИЛИ, входы которого являются входами модуля логики защиты, а выход является его выходом.
11. Устройство вибрационного контроля по п.1, отличающееся тем, что модуль логики защиты содержит логический элемент ИЛИ и мажоритарный логический элемент, входы логического элемента ИЛИ являются входами модуля логики защиты, а выход является его выходом, дополнительные входы модуля логики защиты соединены с входами мажоритарного логического элемента, выход которого соединен с дополнительным входом логического элемента ИЛИ.
12. Устройство вибрационного контроля по п.1, отличающееся тем, что модуль логики защиты содержит логические элементы И, ИЛИ и мажоритарный логический элемент, входы логического элемента И являются входами модуля логики защиты, а выход соединен с первым входом логического элемента ИЛИ, выход которого является выходом модуля логики защиты, дополнительные входы модуля логики защиты соединены с входами мажоритарного логического элемента, выход которого соединен с вторым входом логического элемента ИЛИ.
13. Устройство вибрационного контроля по п.1, отличающееся тем, что модуль вторичного питания содержит преобразователь напряжений, вход которого соединен с входами токоограничивающих элементов, выходы которых являются выходами модуля вторичного питания, входы которого через развязывающие диоды и токоограничивающий элемент соединены с входом преобразователя напряжений.
14. Устройство вибрационного контроля по п.13, отличающееся тем, что в качестве токоограничивающих элементов использованы стабилизаторы напряжения с защитой от короткого замыкания.
15. Устройство вибрационного контроля по п.13, отличающееся тем, что в качестве токоограничивающих элементов использованы самовосстанавливающиеся предохранители или токоограничивающие диоды.
16. Устройство вибрационного контроля по п.3, отличающееся тем, что фильтр нижних частот содержит операционный усилитель, выход которого является выходом фильтра нижних частот, вход которого соединен через первый резистор с первым выводом первого конденсатора, второй вывод которого соединен с общей шиной, которая соединена с прямым входом операционного усилителя, инверсный вход которого соединен через второй резистор с первым выводом первого конденсатора, инверсный вход операционного усилителя соединен через второй конденсатор с выходом операционного усилителя, который через третий резистор соединен с первым выводом первого конденсатора.
17. Устройство вибрационного контроля по п.3, отличающееся тем, что фильтр нижних частот содержит операционный усилитель, выход которого является выходом фильтра нижних частот, вход которого соединен через первый резистор с первым выводом первого конденсатора, второй вывод которого соединен с общей шиной, которая соединена с прямым входом операционного усилителя, инверсный вход которого соединен через второй резистор с первым входом первого конденсатора, инверсный вход операционного усилителя соединен через второй конденсатор с выходом операционного усилителя, который через третий резистор соединен с первым выводом первого конденсатора, который через первый коммутирующий элемент соединен с первым выводом третьего конденсатора, второй вывод которого соединен с общей шиной, а выход операционного усилителя соединен через второй коммутирующий элемент с первым выводом четвертого конденсатора, второй вывод которого соединен с инвертирующим входом операционного усилителя.
18. Устройство вибрационного контроля по п.3, отличающееся тем, что интегрирующий элемент содержит операционный усилитель, выход которого является выходом интегрирующего элемента, вход которого соединен через первый резистор с первым выводом первого конденсатора, второй вывод которого соединен с общей шиной, которая соединена с прямым входом операционного усилителя, инверсный вход которого соединен через второй резистор с первым входом первого конденсатора, инверсный вход операционного усилителя соединен через второй конденсатор с выходом операционного усилителя, который через третий резистор соединен с первым выводом первого конденсатора.
19. Устройство вибрационного контроля по п.3, отличающееся тем, что интегрирующий элемент содержит операционный усилитель, выход которого является выходом интегрирующего элемента, вход которого соединен через первый резистор с первым выводом первого конденсатора, второй вывод которого соединен с общей шиной, которая соединена с прямым входом операционного усилителя, инверсный вход которого соединен через второй резистор с первым входом первого конденсатора, инверсный вход операционного усилителя соединен через второй конденсатор с выходом операционного усилителя, который через третий резистор соединен с первым выводом первого конденсатора, который через первый коммутирующий элемент соединен с первым выводом третьего конденсатора, второй вывод которого соединен с общей шиной, а выход операционного усилителя соединен через второй коммутирующий элемент с первым выводом четвертого конденсатора, второй вывод которого соединен с инверсным входом операционного усилителя.
20. Устройство вибрационного контроля, содержащее датчики, а также блок сбора и обработки данных, который содержит первый аналого-цифровой преобразователь, выход которого соединен с входом ввода данных процессора обработки сигналов, выход которого соединен через цифровой интерфейс с входами микроконтроллера, вход ввода данных которого соединен с выходом второго аналого-цифрового преобразователя, а выход микроконтроллера соединен через интерфейсный элемент с асинхронной последовательной шиной, которая соединена с входом последовательного интерфейса компьютера, выход которого является выходом аварийного сигнала, а выходы датчиков соединены с входами блока сбора и обработки данных, отличающееся тем, что, с целью повышения надежности и достоверности функционирования, входы блока сбора и обработки данных соединены через согласующие элементы с входами формирователя сигналов, выходы которого соединены с входами первого и второго аналого-цифровых преобразователей, входы синхронизации процессора обработки сигналов и микроконтроллера соединены с выходами датчика фазовой отметки, выход процессора обработки сигналов соединен с входом дополнительного интерфейсного элемента, логические выходы процессора обработки сигнала и микроконтроллера соединены с входами модуля логики защиты, выход которого является дополнительным выходом аварийного сигнала, а шины питания соединены с входами модуля вторичного питания, выходы которого соединены с входами питания согласующих элементов.
21. Устройство вибрационного контроля по п.20, отличающееся тем, что в формирователе сигналов каждый вход соединен с входом соответствующего первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с входами формирователя сигналов, соответствующих датчикам, которые использованы для защиты.
22. Устройство вибрационного контроля по п.20, отличающееся тем, что в формирователе сигналов входы соединены с входами матричного аналогового коммутатора, первые и вторые выходы которого соединены с входами соответственно первых и вторых фильтров нижних частот, выходы которых соединены соответственно с первыми и вторыми выходами формирователя сигналов, дополнительные входы которого соединены с дополнительными входами матричного аналогового коммутатора, управляющие входы которого соединены с шиной управляющего кода.
23. Устройство вибрационного контроля, содержащее датчики, а также блок сбора и обработки данных, который содержит первый аналого-цифровой преобразователь, выход которого соединен с входом ввода данных процессора обработки сигналов, выход которого соединен через цифровой интерфейс с входами микроконтроллера, вход ввода данных которого соединен с выходом второго аналого-цифрового преобразователя, а выход микроконтроллера соединен с входом интерфейсного элемента, и содержащее также асинхронную последовательную шину, которая соединена с входом последовательного интерфейса компьютера, выход которого является выходом аварийного сигнала, а выходы датчиков соединены с входами блока сбора и обработки данных, отличающееся тем, что, с целью повышения надежности и достоверности функционирования, входы блока сбора и обработки данных соединены через согласующие элементы с входами формирователя сигналов, выходы которого соединены с входами первого и второго аналого-цифровых преобразователей, входы синхронизации процессора обработки сигналов и микроконтроллера соединены с выходам датчика фазовой отметки, выход процессора обработки сигналов соединен через дополнительный интерфейсный элемент с асинхронной последовательной шиной, логические выходы процессора обработки сигнала и микроконтроллера соединены с входами модуля логики защиты, выход которого является дополнительным выходом аварийного сигнала, а шины питания соединены с входами модуля вторичного питания, выходы которого соединены с входами питания согласующих элементов.
24. Устройство вибрационного контроля по п.23, отличающееся тем, что в формирователе сигналов каждый вход соединен с входом соответствующего первого фильтра нижних частот, выходы которого соединены с первыми выходами формирователя сигналов, вторые выходы которого соединены с выходами вторых фильтров нижних частот, входы которых соединены с входами формирователя сигналов, соответствующих датчикам, которые использованы для защиты.
25. Устройство вибрационного контроля по п.23, отличающееся тем, что в формирователе сигналов входы соединены с входами матричного аналогового коммутатора, первые и вторые выходы которого соединены с входами соответственно первых и вторых фильтров нижних частот, выходы которых соединены соответственно с первыми и вторыми выходами формирователя сигналов, дополнительные входы которого соединены с дополнительными входами матричного аналогового коммутатора, управляющие входы которого соединены с шиной управляющего кода.
| УСТРОЙСТВО ДЛЯ ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ МАШИН | 2001 |
|
RU2202105C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057309C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2073835C1 |
| US 2007156289 A1, 05.07.2007 | |||
| JP 4204021 A, 24.07.1992 | |||
| JP 4270935 A, 29.08.1992. | |||

