Предлагаемое изобретение относится к системам вибрационного контроля и защиты роторных агрегатов, таких как турбины ТЭЦ, ГРЭС и АЭС и другого мощного оборудования.
Известна система контроля и защиты от повреждений, содержащая измерительные блоки, соединенные последовательно, причем выход последнего блока в каждой группе измерительных блоков соединен с сходом компьютера, выход которого является выходом управления контролируемым оборудованием [UD patent application publication US 2004/0054921 A1, 18.03.2004].
Недостатком данной системы является сравнительно низкая надежность и достоверность функционирования.
Известна система вибрационного контроля, содержащая датчики вибрации, выход каждого из которых соединен с входом измерительного блока, который содержит одноканальный аналого-цифровой преобразователь, выход которого соединен с входом процессора обработки сигналов, выход которого соединен с цифровым входом микроконтроллера, цифровой последовательный интерфейс которого соединен с последовательной асинхронной шиной, а выход сигнала аварии микроконтроллера является выходом сигнала аварии измерительного блока, последовательная асинхронная шина соединена через адаптер асинхронных шины к входу USB компьютера, а выходы сигнала аварии соединены с входами модуля защиты, который выполнен на микроконтроллере. [Научно-производственное предприятие «Измерительные Технологии», "Каталог продукции 2007", http://mtels.ru/catalogue.html, стр.132].
К недостаткам данного решения следует отнести сравнительно низкую надежность данной системы. Действительно, с одной стороны, обработка сигнала от датчика выполняется независимым аналого-цифровым преобразователем, процессором обработки сигнала и микроконтроллером. Это приводит к росту количества оборудования, пропорциональному числу каналов, а большое количество оборудования само по себе приводит к увеличению вероятности отказа. С другой стороны, отказ одного из элементов в данном канале приводит к полному отказу канала и это снижает достоверность обнаружения аварийной ситуации и, следовательно, надежности системы. Наконец, реализация логики защиты в данной системы выполнена на одном модуле логики зашиты, который реализован на основе микроконтроллера, а связь модуля логики с измерительными блоками выполняется по нерезервированным каналам, что при любом отказе (обрыв линии связи, аппаратурный отказ в модуле логики защиты или программный сбой в его микроконтроллере) приведет к отказу всей системы защиты роторного агрегата.
Известно устройство контроля вибрации, содежащее датчик вибрации, выход которого соединен с входом измерительного блока, содержащего элемент сравнения измеренного значения с заданным порогом [Патент Российской Федерации №2282169, G01M 7/00, приор. 13.05.2005].
Недостатком данного устройства является сравнительно низкая достоверность определения недопустимого вибрационного состояния контролируемого объекта, так как в нем решение принимается на основании информации, поступающей только от одного датчика.
Известна система вибрационной диагностики и предупреждения аварийной ситуации на эксплуатируемом объекте, содержащая датчики вибрации, выходы которых через согласующие элементы подключены к элементу сравнения, выход которого соединен с входом порогового элемента [Патент Российской Федерации №2288470, G01N 29/04, приор. 04.04.2005].
Недостатками данной системы являются сравнительно низкая надежность, так как повреждение отдельного элемента устройства нарушает его работоспособность в целом.
Известна система вибрационного контроля, содержащая блоки сбора и обработки данных, каждый из которых содержит двухвходовый аналого-цифровой преобразователь высокого разрешения, выход которого соединен с входом ввода данных процессора обработки сигналов, выход которого соединен через цифровой интерфейс с входами микроконтроллера, вход ввода данных которого соединен с выходом четырехвходового аналого-цифрового преобразователя низкого разрешения, а выход микроконтроллера соединен с асинхронной последовательной шиной, которая соединена с входом последовательного интерфейса компьютера, выход которого соединен по сетевому интерфейсу с входом рабочей станции, выход которой является выходом аварийного сигнала [ICHM 20/20 Serial communication data acquisition and processing system / Getting started guide, 2004, Oceana Sensor Technologies Inc.].
Для повышения достоверности срабатывания защиты по превышению порога опасного уровня вибрации рекомендуется обеспечивать ее срабатывание при превышении значения «для горизонтальной и вертикальной вибрации для двух соседних опор или по их сочетанию. Под соседними понимаются подшипники одного ротора или смежные подшипники разных роторов» роторного агрегата [раздел 3.3.5 РД 153-34.1-35.116-2001, стр.18. РАО ЕЭС, ОРГРЭС, 2001 г.].
Известна система вибрационного контроля, содержащая измерительные блоки, входы каждого из которых соединены через согласующий элемент с выходом соответствующего датчика, измерительные блоки содержат формирователи сигналов, два аналого-цифровых преобразователя, входы которых соединены с выходами формирователей сигналов, выход первого аналого-цифрового преобразователя соединен с цифровым входом второго аналого-цифрового преобразователя, выход которого соединен с входом процессора обработки сигналов, выход цифрового последовательного интерфейса которого является выходом данного измерительного блока, измерительные блоки соединены последовательно и выход последнего соединен с входом сетевого контроллера компьютера [Multi-drop, simultaneous sampling sensor network system for aerospace testing and monitoring applications. A.Karolys, F.GenKuong, Sensors applications symposium, 2007, IEEE Volume, Issue, 6-8 Feb 2007, p.1-6].
Недостатками данного устройства являются сравнительно низкая надежность и достоверность функционирования. Действительно, отказ одного из измерительных блоков приводит к неработоспособности всей системы в целом как из-за разрыва шины передачи данных в компьютер, так и из-за потери информации от датчиков, подключенных к данному измерительному блоку, а следовательно, к пропуску сигналов о превышении опасного уровня вибрации, которое может быть зафиксировано этими датчиками.
Наиболее близким к предложенному и выбранным в качестве прототипа является система вибрационного контроля, содержащая измерительные блоки, аналоговые входы каждого из которых соединены с выходам соответствующих датчиков, которые объединены в группу, соответствующую узлу контролируемого агрегата, сетевой выход каждого из измерительных блоков соединен сетевой шиной, которая подключена к компьютеру, а выходы аварийных сигналов измерительных блоков соединены с шиной сигналов защиты контролируемого агрегата [Патент US №6012484 В2, приоритет от 28.06.2005, Н.кл. 702/188, МКИ G01F 1/56. Modular monitoring and protection system topology.].
Целью предлагаемого изобретения является повышение надежности и достоверности функционирования системы вибрационного контроля.
Поставленная цель достигается тем, что в системе вибрационного контроля, содержащей измерительные блоки, аналоговые входы каждого из которых соединены с выходами соответствующих датчиков, которые объединены в группу, соответствующую узлу контролируемого агрегата, сетевой выход каждого из измерительных блоков соединен сетевой шиной, которая подключена к компьютеру через сетевой адаптер, а выходы аварийных сигналов измерительных блоков соединены с шиной сигналов защиты контролируемого агрегата, каждый измерительный блок содержит группы дополнительных аналоговых входов и выходов, которые соединены с соответственно выходами и входами соседних измерительных блоков, а также содержит дополнительные логические входы и выходы, которые соединены соответственно с логическими выходами и входами соседних измерительных блоков, входы синхронизации измерительных блоков соединены с выходом датчика синхронизации, а дополнительные выходы последовательного интерфейса измерительных блоков подключены к дополнительной шине интерфейса, которая соединена с дополнительным входом компьютера, выход которого является дополнительным выходом сигнала защиты агрегата.
В предлагаемом устройстве, с одной стороны, минимизируется количество измерительных блоков, количество которых не превышает количества подшипниковых узлов роторного агрегата, что позволяет существенно уменьшить количество процессоров обработки сигналов и микроконтроллеров, необходимых для реализации измерительных блоков. При этом за счет того, что каждый измерительный блок обрабатывает сигналы от датчиков, установленных как на данном подшипниковом узле, так и от датчиков, установленных на соседних подшипниковых узлах, обеспечивается резервирование такой обработки и даже полный отказ данного измерительного блока не приведет к потере информации, относящейся к данному подшипниковому узлу, поскольку сигналы с датчиков этого узла будут обработаны соседними измерительными блоками. Поскольку в каждом измерительном блоке формируются оценки превышения уровня аварийных уставок вибрации для данного и соседних подшипниковых узлов, в каждом измерительном блоке можно реализовать рекомендуемые алгоритмы защиты, причем в смежных блоках выполнение данных алгоритмов дублируется, что повышает надежность, а наличие связи по цифровым сигналам вибрации между соседними измерительными блоками позволяет в каждом из них реализовать алгоритм мажоритарного резервирования и выдача общего сигнала аварийного останова в виде функции монтажное ИЛИ для таких мажоритарных элементов каждого измерительного блока позволяет получить отказоустойчивый высоконадежный сигнал защиты от аварии. Дополнительное повышение надежности системы обеспечивается за счет использования дублирующего формирования сигнала аварии на выходе компьютера, данные в который поступают по независимым каналам передачи данных по асинхронному последовательному интерфейсу и сетевому каналу передачи данных.
Другое отличие состоит в том, что измерительный блок содержит согласующие узлы, входы которых соединены с соответствующими аналоговыми входами измерительного блока, выходы согласующих узлов соединены с входами формирователя сигналов и с дополнительными аналоговыми выходами, дополнительные аналоговые входы соединены с дополнительными входами формирователя сигналов, первая и вторая группы выходов которого соединены с входами первого и второго аналого-цифровых преобразователей соответственно, выходы первого аналого-цифрового преобразователя соединены с входами процессора обработки сигналов, а выходы второго аналого-цифрового преобразователя соединены с входами микроконтроллера, выходы сетевого интерфейса которого соединены через первый интерфейсный формирователь с сетевыми выходами измерительного блока, дополнительные выходы последовательного интерфейса которого через второй интерфейсный формирователь соединены с выходом последовательного интерфейса процессора обработки сигналов, цифровая шина которого соединена с цифровой шиной микроконтроллера, дополнительные входы микроконтроллера и процессора обработки сигналов соединены с входами синхронизации измерительного блока, который также содержит модуль логики защиты, выход которого является выходом аварийного сигнала измерительного блока, дополнительные логические выходы которого соединены с логическим выходом модуля логики защиты, логические входы которого соединены с логическими выходами процессора обработки сигналов и микроконтроллера, а дополнительные логические входы модуля логики защиты соединены с дополнительными логическими входами измерительного блока, резервированные входы питания которого соединены с входами вторичного узла питания измерительного блока.
Другое отличие предлагаемого изобретения состоит в том, что в измерительном блоке второй аналого-цифровой преобразователь интегрирован с микроконтроллером.
Другое отличие предлагаемого изобретения состоит в том, что связь между цифровыми выходами процессора обработки сигналов с цифровыми выходами микроконтроллера выполнена через элемент буферной памяти.
Другое отличие предлагаемого изобретения состоит в том, что модуль логики защиты содержит мажоритарный логический элемент, выход которого является выходом модуля логики защиты, логические входы которого соединены с входами логического элемента ИЛИ, выход которого соединен с первым входом мажоритарного логического элемента и является дополнительным логическим выходом модуля логики защиты, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента.
Другое отличие предлагаемого изобретения состоит в том, что мажоритарный логический элемент выполнен с открытым выходом.
Другое отличие предлагаемого изобретения состоит в том, что модуль логики защиты содержит мажоритарный логический элемент, выход которого является выходом модуля логики защиты, логические входы которого соединены с входами логического элемента И, выход которого соединен с первым входом мажоритарного логического элемента и является дополнительным логическим выходом модуля логики защиты, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента.
Другое отличие предлагаемого изобретения состоит в том, что модуль логики защиты содержит мажоритарный логический элемент, выход которого соединен через первый резистор с управляющим электродом транзистора, который через второй резистор соединен с общей шиной, которая соединена с общим электродом транзистора, выходной электрод которого является выходом модуля логики защиты, логические входы которого соединены с входами логического элемента И, выход которого соединен с первым входом мажоритарного логического элемента и является дополнительным логическим выходом модуля логики защиты, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента.
Другое отличие предлагаемого изобретения состоит в том, что модуль логики защиты содержит мажоритарный логический элемент, выход которого соединен через первый резистор с управляющим электродом транзистора, который через второй резистор соединен с общей шиной, которая соединена с общим электродом транзистора, выходной электрод которого соединен через управляющую обмотку реле с шиной питания, а выходные нормально разомкнутые контакты реле являются выходами модуля логики защиты, логические входы которого соединены с входами логического элемента И, выход которого соединен с первым входом мажоритарного логического элемента и является дополнительным логическим выходом модуля логики защиты, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента.
Другое отличие предлагаемого изобретения состоит в том, что вторичный узел питания измерительного блока содержит диоды, аноды которых являются входами узла питания, катоды соединены с входом токоограничивающего элемента, выход которого является вспомогательным аналоговым выходом, а вход токоограничивающего элемента соединен с входом формирователя напряжений питания измерительного блока.
Другое отличие предлагаемого изобретения состоит в том, что вторичный узел питания измерительного блока содержит диоды, аноды которых являются входами узла питания, катоды соединены через предохранительный элемент с входом токоограничивающего элемента, выход которого является вспомогательным аналоговым выходом, а вход токоограничивающего элемента соединен с входом формирователя напряжений питания измерительного блока.
Другое отличие предлагаемого изобретения состоит в том, что формирователь сигналов содержит первые фильтры нижних частот, выходы которых являются первой группой выходов формирователя сигналов, вторая группа выходов которого соединена с выходами вторых фильтров нижних частот, входы которых соединены с выходами интегрирующих элементов, входы которых соединены с входами соответствующих первых фильтров нижних частот и являются входами формирователя сигналов.
Другое отличие предлагаемого изобретения состоит в том, что формирователь сигналов содержит первые фильтры нижних частот, выходы которых являются первой группой выходов формирователя сигналов, вторая группа выходов которого соединена с выходами вторых фильтров нижних частот, входы которых соединены с входами соответствующих первых фильтров нижних частот и с выходами соответствующих интегрирующих элементов, входы которых являются входами формирователя сигналов.
Другое отличие предлагаемого изобретения состоит в том, что формирователь сигналов содержит первые фильтры нижних частот, выходы которых являются первой группой выходов формирователя сигналов, вторая группа выходов которого соединена с выходами вторых фильтров нижних частот, входы которых соединены с входами соответствующих первых фильтров нижних частот и являются входами формирователя сигналов.
На фиг.1 показана структурная схема системы вибрационного контроля. На фиг.2 представлен вариант выполнения измерительного блока. На фиг.3-6 показаны варианты реализации модуля логики защиты. На фиг.7 показана структурная схема вторичного узла питания. На фиг.8-10 показаны структурные схемы возможных вариантов выполнения формирователя сигналов измерительного блока.
Система вибрационного контроля содержит измерительные блоки 1-1÷1-6, аналоговые входы каждого из которых соединены с выходами соответствующих датчиков 2÷6, которые объединены в группу, соответствующую узлу, например подшипниковому 7-1÷7-6, контролируемого агрегата, сетевой выход каждого из измерительных блоков соединен сетевой шиной 8, которая подключена к компьютеру 9 через сетевой адаптер 10, а выходы аварийных сигналов измерительных блоков 1-1÷1-6 соединены с шиной 11 сигналов защиты контролируемого агрегата. Каждый i-й измерительный блок 1-i содержит группы дополнительных аналоговых входов и выходов, которые соединены с соответственно выходами и входами соседних измерительных блоков 1-i-1 и 1-i+1, а также содержит дополнительные логические входы и выходы, которые соединены соответственно с логическими выходами и входами соседних измерительных блоков 1-i-1 и 1-i+1, входы синхронизации измерительных блоков 1-1÷1-6 соединены с выходом датчика 12 синхронизации, а дополнительные выходы последовательного интерфейса измерительных блоков 1-1÷1-6 подключены к дополнительной шине 13 интерфейса, которая соединена с дополнительным входом компьютера 9, выход которого является дополнительным выходом 14 сигнала защиты агрегата.
Измерительный блок 1 содержит согласующие узлы 15, входы которых соединены с соответствующими аналоговыми входами измерительного блока 1, выходы согласующих узлов 15 соединены с входами формирователя сигналов 16 и с дополнительными аналоговыми выходами, дополнительные аналоговые входы соединены с дополнительными входами формирователя сигналов 16, первая и вторая группы выходов которого соединены с входами первого 17 и второго 18 аналого-цифровых преобразователей соответственно, выходы первого аналого-цифрового преобразователя 17 соединены с входами процессора обработки сигналов 19, а выходы второго аналого-цифрового преобразователя 18 соединены с входами микроконтроллера 20, выходы сетевого интерфейса которого соединены через первый интерфейсный формирователь 21 с сетевыми выходами измерительного блока, дополнительные выходы последовательного интерфейса которого через второй интерфейсный формирователь 22 соединены с выходом последовательного интерфейса процессора обработки сигналов 19, цифровая шина которого соединена с цифровой шиной микроконтроллера 20, дополнительные входы микроконтроллера 20 и процессора обработки сигналов 19 соединены с входами синхронизации измерительного блока, который также содержит модуль логики защиты 23, выход которого является выходом аварийного сигнала измерительного блока, дополнительные логические выходы которого соединены с логическим выходом модуля логики защиты 23, логические входы которого соединены с логическими выходами процессора обработки сигналов 19 и микроконтроллера 20, а дополнительные логические входы модуля логики защиты 23 соединены с дополнительными логическими входами измерительного блока, резервированные входы питания которого соединены с входами вторичного узла питания 24 измерительного блока.
Входы резервного питания измерительных блоков соединены с шиной питания 25 и выходами резервного питания других блоков.
В измерительном блоке второй аналого-цифровой преобразователь 18 может быть интегрирован с микроконтроллером 20, как показано на фиг.1, или как самостоятельный конструктивный элемент, как показано на фиг.2.
Связь между цифровыми выходами процессора обработки сигналов с цифровыми выходами микроконтроллера может быть выполнена через внешний однопортовый или двухпортовый элемент буферной памяти 26.
Модуль логики защиты 23 может быть выполнен как в виде единичного логического элемента, так и в виде настраиваемой или фиксированной логической схемы, реализующей требуемою функцию. Показанный на фиг.3 вариант исполнения модуля логики защиты содержит мажоритарный логический элемент 27, выход которого является выходом модуля логики защиты, логические входы которого соединены с входами логического элемента ИЛИ 28, выход которого соединен с первым входом мажоритарного логического элемента 27 и является дополнительным логическим выходом модуля логики защиты 23, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента 28.
Мажоритарный логический элемент 28 при таком исполнении может быть выполнен с открытым выходом.
Модуль логики защиты 23 в исполнении, показанном на фиг.4, содержит мажоритарный логический элемент 28, выход которого является выходом модуля логики защиты 23, логические входы которого соединены с входами логического элемента И 29, выход которого соединен с первым входом мажоритарного логического элемента 27 и является дополнительным логическим выходом модуля логики защиты, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента 27.
Модуль логики защиты в соответствии со схемой, показанной на фиг.5, содержит мажоритарный логический элемент 27, выход которого соединен через первый резистор 30 с управляющим электродом транзистора 31, который через второй резистор 32 соединен с общей шиной, которая соединена с общим электродом транзистора 31, выходной электрод которого является выходом модуля логики защиты 23, логические входы которого соединены с входами логического элемента И 29, выход которого соединен с первым входом мажоритарного логического элемента 27 и является дополнительным логическим выходом модуля логики защиты 23, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента 27.
Модуль логики защиты 23, выполненный в соответствии со схемой, показанной на фиг.6, содержит мажоритарный логический элемент 27, выход которого соединен через первый резистор 30 с управляющим электродом транзистора 31, который через второй резистор 32 соединен с общей шиной, которая соединена с общим электродом транзистора 31, выходной электрод которого соединен через управляющую обмотку реле 33 с шиной питания, а выходные нормально разомкнутые контакты реле 33 являются выходами модуля логики защиты, логические входы которого соединены с входами логического элемента И 29, выход которого соединен с первым входом мажоритарного логического элемента 27 и является дополнительным логическим выходом модуля логики защиты 23, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента 27.
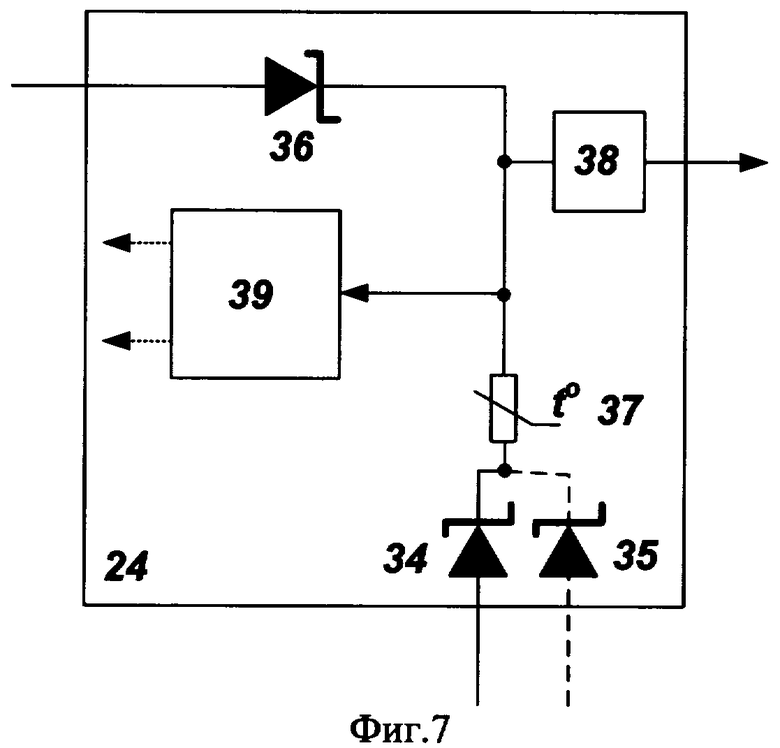
Вторичный узел питания 24, как показано на схеме фиг.7, измерительного блока содержит диоды, аноды которых являются входами узла питания, катоды соединены с входом токоограничивающего элемента, выход которого является вспомогательным аналоговым выходом, а вход токоограничивающего элемента соединен с входом формирователя напряжений питания измерительного блока.
Вторичный узел питания 24 измерительного блока содержит диоды 34-36, аноды которых являются входами вторичного узла питания 24, катоды соединены через предохранительный элемент 37 с входом токоограничивающего элемента 38, выход которого является вспомогательным аналоговым выходом, а вход токоограничивающего элемента 38 соединен с входом формирователя 39 напряжений питания измерительного блока.
В качестве диодов 34-36 могут быть использованы как обычные диоды, так и диоды Шотки. Количество диодов определяется количеством входов вторичного узла питания. Если основное питание подается по одной шине, возможно использование только одного диода 34, если по резервированным шинам питания, то число диодов будет равно числу шин питания. Для повышения надежности возможно подключение одного из входов через соответствующий диод 36 к вспомогательному аналоговому выходу вторичного узла питания соседнего измерительного блока, как показано на фиг.1. В качестве выхода питания для согласующих элементов 15 используются выходы формирователя 39. В качестве предохранительного элемента 37 целесообразно использовать электронный или самовосстанавливающийся предохранитель на основе термистора. Токоограничивающий элемент 38 может быть выполнен, например, на основе токоограничивающего диода (current regulator diod).
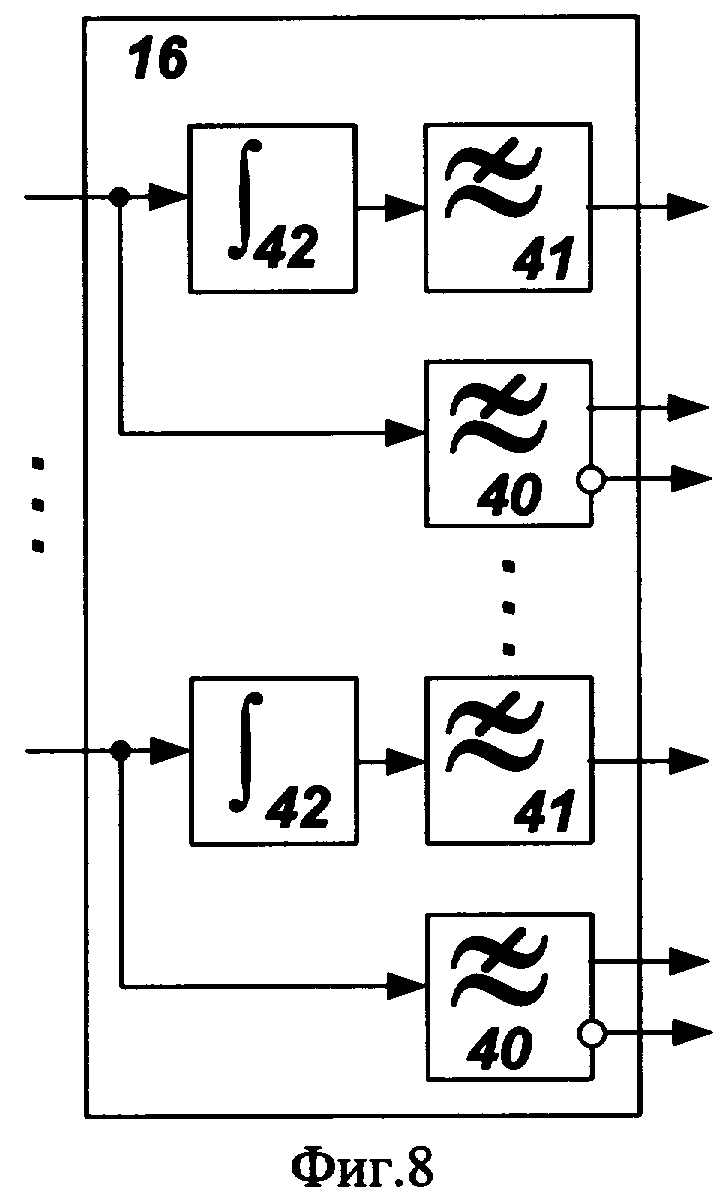
Формирователь сигналов 16 со схемой, показанной на фиг.8, содержит первые фильтры нижних частот 40, выходы которых являются первой группой выходов формирователя сигналов 16, вторая группа выходов которого соединена с выходами вторых фильтров нижних частот 41, входы которых соединены с выходами интегрирующих элементов 42, входы которых соединены с входами соответствующих первых фильтров нижних частот 40 и являются входами формирователя сигналов 16.
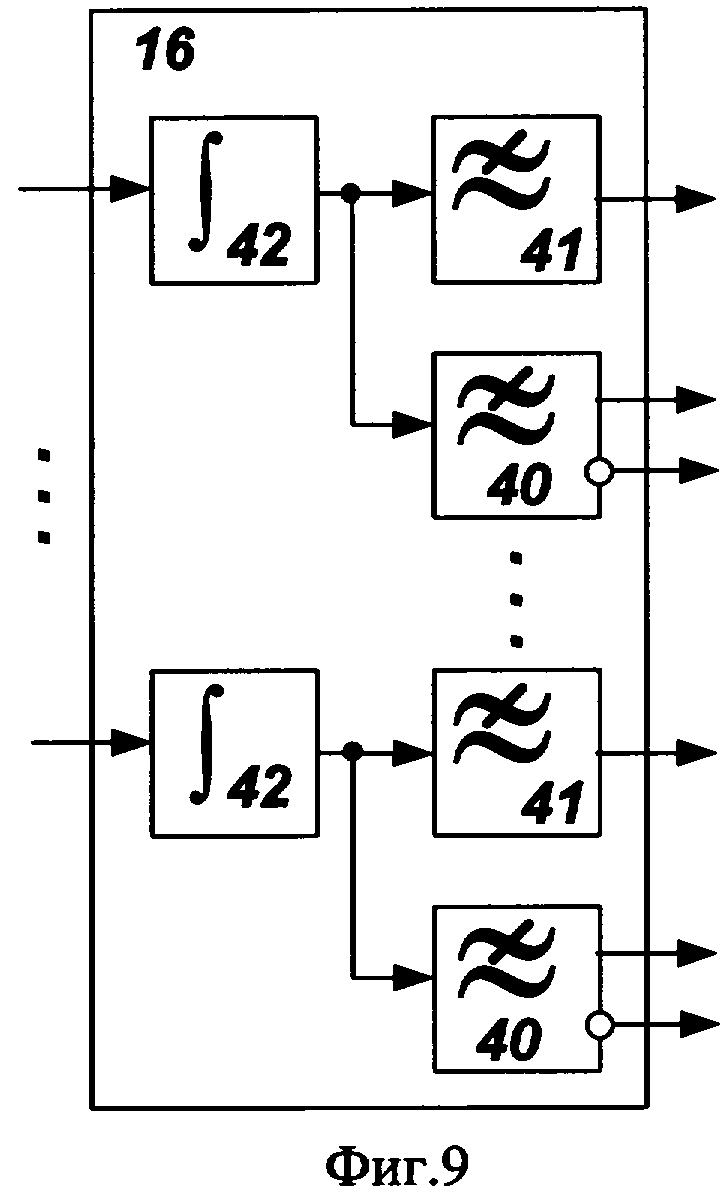
Формирователь сигналов 16, выполненный по схеме, показанной на фиг.9, содержит первые фильтры нижних частот 40, выходы которых являются первой группой выходов формирователя сигналов 16, вторая группа выходов которого соединена с выходами вторых фильтров нижних частот 41, входы которых соединены с входами соответствующих первых фильтров нижних частот 40 и с выходами соответствующих интегрирующих элементов 42, входы которых являются входами формирователя сигналов 16.
Формирователь сигналов 16, выполненный по схеме, показанной на фиг.10, содержит первые фильтры нижних частот 40, выходы которых являются первой группой выходов формирователя сигналов 16, вторая группа выходов которого соединена с выходами вторых фильтров нижних частот 41, входы которых соединены с входами соответствующих первых фильтров нижних частот 40 и являются входами формирователя сигналов.
В зависимости от набора датчиков, подключаемых к измерительному блоку, формирователь сигналов 16 может выполняться по одной из показанных схем. Возможны также комбинации вариантов исполнения.
Система работает следующим образом.
На контролируемом агрегате на каждом подшипниковом узле установлена группа датчиков. Например, на показанной на фиг.1 на подшипниковом узле 7-3 установлены датчики вертикальной вибрации подшипника 2, поперечной вибрации подшипника 3, осевой вибрации подшипника 4, вертикальной вибрации вала 6 и горизонтальной вибрации вала 6. В качестве датчиков вибрации подшипника могут быть использованы, например, акселерометры, а в качестве датчиков вибрации вала - токовихревые проксиметры. Набор датчиков может быть различным в зависимости от объема контроля. При движении ротора датчики формируют электрические сигналы, которые поступают на соответствующие согласующие узлы, которые преобразуют сигналы от датчиков в сигналы напряжения, пропорциональные текущему значению вибросигнала. Например, для пьезоэлектрических акселерометров согласующий узел может быть выполнен в виде усилителя заряда или напряжения. Нормированный выходной сигнал от согласующих узлов 15 данного блока поступает через формирователь сигналов 16 данного блока на входы первых 17 и вторых 18 аналого-цифровых преобразователей данного блока. Одновременно сигналы с выходов согласующих узлов поступают через формирователи сигналов соседних блоков на аналого-цифровые преобразователи этих блоков. Сигналы с выходом аналого-цифровых преобразователей 17 и 18 поступают в каждом из измерительных блоков соответственно на процессор обработки сигналов 19 и микроконтроллер 20.
При контроле вибрационного состояния агрегата обычно решаются две задачи. Первая задача состоит в выявлении зарождающихся дефектов на ранней стадии их появления. Данная задача требует обработки вибрационных сигналов в широком диапазоне частот и в большом динамическом диапазоне. Для этого необходимо использовать аналого-цифровой преобразователь высокой разрядности и процессор обработки сигналов, который в реальном масштабе времени может реализовать требуемые диагностические алгоритмы. Вторая задача вибрационного контроля состоит в реализации функции защиты агрегата от повышенной вибрации. Данная задача с точки зрения обработки требует существенно меньшей производительности процессорного элемента и может быть реализована на микроконтроллере, который работает с более простой программой и, следовательно, более устойчив к возможным программным сбоям. В предлагаемом устройстве расчеты, связанные с диагностикой, реализуются процессорами обработки сигналов. Одновременно эти процессоры формируют оценки параметров вибрации, положенные в основу алгоритма защиты. Например, определяются значение среднеквадратического уровня виброскорости и сравнение с пороговыми значения в полосе 10-100 Гц. Для турбоагрегатов в качестве пороговых уровнем могут быть выбраны в соответствии с требованиями стандартов значения уровня ПРЕДУПРЕЖДЕНИЯ 7,2 мм/с и уровня АВАРИИ 11,2 мм/с. Если в качестве логики защиты принято достижение вибрации уровня АВАРИИ по одному из каналов, соответствующий сигнал формируется на логическом выходе процессора обработки сигналов и передается им через интерфейсный формирователь 22 и шину 13 в компьютер. Если использован другой алгоритм формирования сигналов защитного отключения, например достижение по одному из каналов уровня вибрации уровня АВАРИИ и подтверждением этого уровня достижением уровня ПРЕДУПРЕЖДЕНИЕ на других каналах измерения вибрации этого или соседних подшипников, процессор обработки сигналов проводит соответствующие сравнения, формирует на своем логическом выходе сигнал защитного останова и передает соответствующее сообщение в компьютер. Использование алгоритмов с подтверждением повышает достоверность формирования сигнала защитного останова и снижает риск ложных срабатываний. Аналогичные алгоритмы защиты реализуются и в микроконтроллере, который также на своем логическом выходе формирует сигнал защитного останова. Поскольку как процессор обработки сигналов, так и микроконтроллер получают сигналы как от датчиков, установленных на «своем подшипнике», так и от датчиков, установленных на соседних подшипниках, процессор обработки сигналов 19 и микроконтроллер 20 реализуют параллельно указанные алгоритмы логики защиты. Реализация алгоритмов диагностики не предъявляет жестких требований к постоянной исправности, поскольку ранняя диагностика не включается в автоматическую защиту агрегата с его быстрым неплановым остановом.
Таким образом, даже если и произойдет сбой в работе процессора обработки сигналов, это может быть выявлено средствами самодиагностики и устранено обслуживающим персоналом. В предлагаемой системе алгоритмы защиты, которые должны автоматически остановить агрегат, параллельно реализуются как в процессоре обработки сигналов, так и в микроконтроллере, причем как в данном измерительном блоке, так и в соседнем, т.е. обеспечивается многократное резервирование выполнения этого алгоритма для каждого из каналов. При достижении аварийного состояния соответствующие логические сигналы поступают в измерительном блоке на модуль логики защиты, который аппаратно сравнивает логические сигналы по заданной логической функции и формирует на своем выходе сигнал защитного останова. Параллельно, соответствующие сообщения поступают по шинам 8 и 13 в компьютер, который также на своем выходе формирует дублирующий сигнал защитного останова. Для повышения достоверности сигнала защитного останова на выходе каждого модуля логики защиты в нем на выходе используется мажоритарный логический элемент, который формирует сигнал защитного отключения только при формировании такого сигнала в двух или трех соседних измерительных блоках. Таким образом достигается высокая достоверность определения аварийной ситуации при высокой отказоустойчивости системы. Например, если в одном из измерительных блоков откажут все формирователи сигналов, аналого-цифровые преобразователи и процессор обработки сигналов и микроконтроллер, информация с датчиков соответствующего подшипника через соседние измерительные блоки в случае опасной ситуации обеспечит формирование сигнала защитного останова.
Наличие параллельной передачи сообщений от измерительных блоков в компьютер о аварийной ситуации позволяет дублировать формирование сигнала защитного отключения, что повышает достоверность формирования сигнала защитного отключения. При этом даже полный отказ обмена по одной из шин передачи данных 8 или 13 не нарушает работоспособности. Для еще большей устойчивости к обрывам шин передачи данных 8 и 13 эти шины могут быть в виде кольцевых структур, подключаемых к соответствующим парам входных входов компьютера и сетевого адаптера 10.
Питание измерительных блоков может быть выполнено по независимой одиночной или резервированной шине питания 25. Это питание поступает на вторичный узел питания измерительного блока, который формирует питание для элементов и узлов данного блока, в том числе и для питания согласующих узлов.
Для того чтобы возникновение короткого замыкания не вызвало нарушений работы в других блоках из-за перегрузки шин питания, во вторичном уле питания предусмотрены элементы 37 и 38, ограничивающие ток. Для повышения достоверности работы при нарушениях в цепях питания узел вторично питания 24 питается с защищенных выходов улов питания соседних измерительных блоков.
В зависимости от типов используемых датчиков реализация формирователей сигналов может быть различной. Для снижения требований к вычислительной производительности микроконтроллера желательно на его вход подать сигнал виброскорости. Если соответствующий датчик является датчиком виброскорости, сигнал может быть передан на аналого-цифровой преобразователь 18 через фильтр нижних частот 41, который выполняет функции антиалайзингового фильтра. Если датчики формируют сигналы, пропорциональные ускорению, может потребоваться предварительное интегрирование сигнала интегрирующим элементом 42. При этом в зависимости от особенностей агрегата и сложности алгоритмов обработки на процессор обработки сигналов от датчика ускорений может передаваться сигнал без интегрирования (фиг.8) или с предварительным аналоговым интегрированием (фиг.9). Во втором случае может быть обеспечен более широкий динамический диапазон, но снижаются возможности анализа высокочастотных составляющих, что ограничивает возможности применения алгоритмов диагностики, связанных с анализом сигналов виброускорения.
Синхронизация работы измерительных блоков выполняется по сигналам от датчика синхронизации 12. В качестве такого датчика могут быть использованы датчики метки начального положения вала или фазовой отметки. Для обеспечения резервирования таких датчиков может быть несколько.
В качестве микроконтроллера 20 в измерительных блоках возможно использование процессора обработки, аналогичного процессору обработки сигналов 19.
Использование в предлагаемой измерительной системе многоканальных измерительных блоков с резервированной обработкой данных от соседних групп датчиков и сравнение логических сигналов, свидетельствующих о необходимости защитного отключения агрегата при превышении допустимых уровней вибрации или их сочетания в соответствии с заданным алгоритмом, что обеспечивается наличием перекрестных связей между измерительными блоками как на уровне аналоговых сигналов, так и на уровне логических сигналов, а также дублирование каналов передачи данных в компьютерную систему и параллельное формирование сигналов защитного отключения агрегата как на уровне измерительных блоков, так и на уровне компьютера позволяют существенно повысить надежность и достоверность формирования таких сигналов при сравнительно низких аппаратурных затратах в пересчете на канал измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВИБРАЦИОННОГО КОНТРОЛЯ (ВАРИАНТЫ) | 2008 |
|
RU2375692C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО КОНТРОЛЯ (ВАРИАНТЫ) | 2008 |
|
RU2376564C1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ГАЛЬВАНИЧЕСКИХ ВАНН | 1998 |
|
RU2135647C1 |
| СТАЦИОНАРНОЕ ПРИЕМНО-ПЕРЕДАЮЩЕЕ УСТРОЙСТВО, УНИВЕРСАЛЬНЫЙ ГЕНЕРАТОР И УНИВЕРСАЛЬНЫЙ ПРИЕМНИК СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2009 |
|
RU2400388C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЗАЩИТЫ | 2005 |
|
RU2344532C2 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ВИБРАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2658577C2 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО СБОРА ДАННЫХ ДЛЯ ДАТЧИКОВ С ДВУХПРОВОДНЫМ ИНТЕРФЕЙСОМ (ВАРИАНТЫ) | 2008 |
|
RU2401419C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВИБРАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2658568C2 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |


Система вибрационного контроля содержит измерительные блоки, аналоговые входы каждого из которых соединены с выходами соответствующих датчиков, которые объединены в группу, соответствующую узлу контролируемого агрегата, сетевые выходы измерительных блоков соединены по сетевым шинам с компьютером через сетевой адаптер, а выходы аварийных сигналов измерительных блоков соединены с шиной сигналов защиты контролируемого агрегата. Каждый измерительный блок содержит группы дополнительных аналоговых входов и выходов, которые соединены соответственно с выходами и входами соседних измерительных блоков, а также содержит дополнительные логические входы и выходы, которые соединены соответственно с логическими выходами и входами соседних измерительных блоков. За счет использования указанных перекрестных связей между каналами обеспечиваются резервированная обработка данных от групп датчиков и формирование сигналов зашитого отключения с повышенной достоверностью. Входы синхронизации измерительных блоков соединены с выходом датчика синхронизации, а дополнительные выходы последовательного интерфейса измерительных блоков подключены к дополнительной шине интерфейса, которая соединена с дополнительным входом компьютера, выход которого является дополнительным выходом сигнала защиты агрегата, что обеспечивает повышенную надежность передачи сигналов защитного отключения за счет резервирования каналов передачи и формирования таких сигналов. 13 з.п. ф-лы, 10 ил.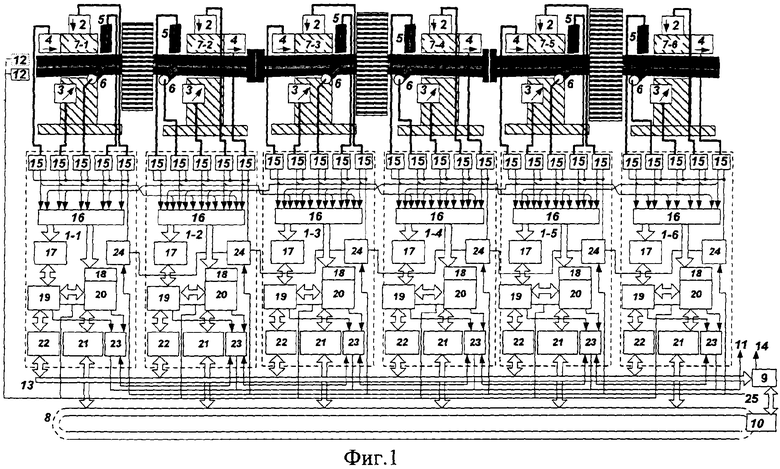
1. Система вибрационного контроля, содержащая измерительные блоки, аналоговые входы каждого из которых соединены с выходами соответствующих датчиков, которые объединены в группу, соответствующую узлу контролируемого агрегата, сетевой выход каждого из измерительных блоков соединен с сетевой шиной, которая подключена к компьютеру через сетевой адаптер, а выходы аварийных сигналов измерительных блоков соединены с шиной сигналов защиты контролируемого агрегата, отличающаяся тем, что, с целью повышения надежности и достоверности функционирования, каждый измерительный блок содержит группы дополнительных аналоговых входов и выходов, которые соответственно соединены с выходами и входами соседних измерительных блоков, а также содержит дополнительные логические входы и выходы, которые соединены соответственно с логическими выходами и входами соседних измерительных блоков, входы синхронизации измерительных блоков соединены с выходом датчика синхронизации, а дополнительные выходы последовательного интерфейса измерительных блоков подключены к дополнительной шине интерфейса, которая соединена с дополнительным входом компьютера, выход которого является дополнительным выходом сигнала защиты агрегата.
2. Система вибрационного контроля по п.1, отличающаяся тем, что измерительный блок содержит согласующие узлы, входы которых соединены с соответствующими аналоговыми входами измерительного блока, выходы согласующих узлов соединены с входами формирователя сигналов и с дополнительными аналоговыми выходами, дополнительные аналоговые входы соединены с дополнительными входами формирователя сигналов, первая и вторая группы выходов которого соединены с входами первого и второго аналого-цифровых преобразователей соответственно, выходы первого аналого-цифрового преобразователя соединены с входами процессора обработки сигналов, а выходы второго аналого-цифрового преобразователя соединены с входами микроконтроллера, выходы сетевого интерфейса которого соединены через первый интерфейсный формирователь с сетевыми выходами измерительного блока, дополнительные выходы последовательного интерфейса которого через второй интерфейсный формирователь соединены с выходом последовательного интерфейса процессора обработки сигналов, цифровая шина которого соединена с цифровой шиной микроконтроллера, дополнительные входы микроконтроллера и процессора обработки сигналов соединены с входами синхронизации измерительного блока, который также содержит модуль логики защиты, выход которого является выходом аварийного сигнала измерительного блока, дополнительные логические выходы которого соединены с логическим выходом модуля логики защиты, логические входы которого соединены с логическими выходами процессора обработки сигналов и микроконтроллера, а дополнительные логические входы модуля логики защиты соединены с дополнительными логическими входами измерительного блока, резервированные входы питания которого соединены с входами вторичного узла питания измерительного блока.
3. Система вибрационного контроля по п.2, отличающаяся тем, что в измерительном блоке второй аналого-цифровой преобразователь интегрирован с микроконтроллером.
4. Система вибрационного контроля по п.2, отличающаяся тем, что связь между цифровыми выходами процессора обработки сигналов с цифровыми выходами микроконтроллера выполнена через элемент буферной памяти.
5. Система вибрационного контроля по п.2, отличающаяся тем, что модуль логики защиты содержит мажоритарный логический элемент, выход которого является выходом модуля логики защиты, логические входы которого соединены с входами логического элемента ИЛИ, выход которого соединен с первым входом мажоритарного логического элемента и является дополнительным логическим выходом модуля логики защиты, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента.
6. Система вибрационного контроля по п.5, отличающаяся тем, что мажоритарный логический элемент выполнен с открытым выходом.
7. Система вибрационного контроля по п.2, отличающаяся тем, что модуль логики защиты содержит мажоритарный логический элемент, выход которого является выходом модуля логики защиты, логические входы которого соединены с входами логического элемента И, выход которого соединен с первым входом мажоритарного логического элемента и является дополнительным логическим выходом модуля логики защиты, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента.
8. Система вибрационного контроля по п.2, отличающаяся тем, что модуль логики защиты содержит мажоритарный логический элемент, выход которого соединен через первый резистор с управляющим электродом транзистора, который через второй резистор соединен с общей шиной, которая соединена с общим электродом транзистора, выходной электрод которого является выходом модуля логики защиты, логические входы которого соединены с входами логического элемента И, выход которого соединен с первым входом мажоритарного логического элемента и является дополнительным логическим выходом модуля логики защиты, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента.
9. Система вибрационного контроля по п.2, отличающаяся тем, что модуль логики защиты содержит мажоритарный логический элемент, выход которого соединен через первый резистор с управляющим электродом транзистора, который через второй резистор соединен с общей шиной, которая соединена с общим электродом транзистора, выходной электрод которого соединен через управляющую обмотку реле с шиной питания, а выходные нормально разомкнутые контакты реле являются выходами модуля логики защиты, логические входы которого соединены с входами логического элемента И, выход которого соединен с первым входом мажоритарного логического элемента и является дополнительным логическим выходом модуля логики защиты, дополнительные логические входы которого соединены с вторым и третьим входами мажоритарного логического элемента.
10. Система вибрационного контроля по п.2, отличающаяся тем, что вторичный узел питания измерительного блока содержит диоды, аноды которых являются входами вторичного узла питания, катоды соединены с входом токоограничивающего элемента, выход которого является вспомогательным аналоговым выходом, а вход токоограничивающего элемента соединен с входом формирователя напряжений питания измерительного блока.
11. Система вибрационного контроля по п.2, отличающаяся тем, что вторичный узел питания измерительного блока содержит диоды, аноды которых являются входами узла питания, катоды диодов соединены через предохранительный элемент с входом токоограничивающего элемента, выход которого является вспомогательным аналоговым выходом, а вход токоограничивающего элемента соединен с входом формирователя напряжений питания измерительного блока и с катодом дополнительного диода, анод которого является дополнительны входом узла питания.
12. Система вибрационного контроля по п.2, отличающаяся тем, что формирователь сигналов содержит первые фильтры нижних частот, выходы которых являются первой группой выходов формирователя сигналов, вторая группа выходов которого соединена с выходами вторых фильтров нижних частот, входы которых соединены с выходами интегрирующих элементов, входы которых соединены с входами соответствующих первых фильтров нижних частот и являются входами формирователя сигналов.
13. Система вибрационного контроля по п.2, отличающаяся тем, что формирователь сигналов содержит первые фильтры нижних частот, выходы которых являются первой группой выходов формирователя сигналов, вторая группа выходов которого соединена с выходами вторых фильтров нижних частот, входы которых соединены с входами соответствующих первых фильтров нижних частот и с выходами соответствующих интегрирующих элементов, входы которых являются входами формирователя сигналов.
14. Система вибрационного контроля по п.2, отличающаяся тем, что формирователь сигналов содержит первые фильтры нижних частот, выходы которых являются первой группой выходов формирователя сигналов, вторая группа выходов которого соединена с выходами вторых фильтров нижних частот, входы которых соединены с входами соответствующих первых фильтров нижних частот и являются входами формирователя сигналов.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВИБРАЦИИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1991 |
|
RU2017080C1 |
| УСТРОЙСТВО ДЛЯ СИГНАЛИЗАЦИИ ПРЕДЕЛЬНЫХ ПАРАМЕТРОВ ВИБРАЦИИ | 1992 |
|
RU2045751C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2073835C1 |
| US 2007156289 A1, 05.07.2007 | |||
| JP 2005106638 A, 21.04.2005 | |||
| JP 4270935 A, 29.08.1992. | |||

