Изобретение относится к электротехнике и может быть использовано в технике релейной защиты объектов с электрическими нагрузками, например однофазных и трехфазных двигателей.
Известна система защиты электродвигателя (Патент №2192699, МПК 7 Н02Н 7/08. Устройство для защиты электродвигателя. Степанов В.И., Степанов В.А. БИ №35 от 10.11.2002 г.), содержащая трансформаторы тока для подключения в разные фазы питания электродвигателя, выпрямитель, блок контроля перегрузки, блок формирования времятоковой характеристики и исполнительные реле, причем блок контроля перегрузки выполнен на дискретных радиокомпонентах. Недостатком такой системы является пониженные условия автоматизации, а надежность работы ее снижается с увеличением времени непрерывного функционирования.
Известна также микропроцессорная система защиты (Чернобровов Н.Н., Семенов В.А. Релейная защита энергетических систем, 1998. - 776 с.), содержащая блоки промежуточных трансформаторов и частотных фильтров, аналого-цифровой преобразователь и микропроцессорную систему управления.
Недостатком этой системы являются большие габаритные размеры, низкая надежность и ограниченные функциональные возможности, обуславливающие применение их только в стационарных условиях эксплуатации.
Наиболее близким по технической сущности к изобретению является микропроцессорная система защиты (Патент №2222083, МПК 7 Н02Н 7/26, G01R 23/165, G01L 31/08. БИ №27 от 20.09.2001 г.), содержащая блоки гальванической развязки (блоки датчиков) и предварительного масштабирования (блоки масштабирования) входных сигналов в виде тока и напряжения, блок частотных фильтров (блок нормализации сигналов), формирователь сигналов контроля и диагностики, аналого-цифровой преобразователь и микропроцессорную систему управления выходными реле и сигнализацией в соответствии с алгоритмами защиты, причем группы выходов блоков гальванической развязки и предварительного масштабирования входных сигналов в виде тока и напряжения соединены соответственно с первой и второй группами входов блока частотных фильтров, группа выходов которого соединена с группой входов аналого-цифрового преобразователя, группа входов-выходов которого соединена с первой группой входов-выходов микропроцессорной системы управления выходными реле и сигнализацией в соответствии с алгоритмами защиты, причем группа входов формирователя сигналов контроля и диагностики соединена с группой выходов аналого-цифрового преобразователя, первая группа выходов формирователя сигналов контроля и диагностики соединена со второй группой входов блока гальванической развязки и предварительного масштабирования входных сигналов в виде тока, вторая группа выходов формирователя сигналов контроля и диагностики соединена со второй группой входов блока гальванической развязки и предварительного масштабирования входных сигналов в виде напряжения, причем группы входов и выходов микропроцессорной системы управления связаны с персональной ЭВМ (регистратором).
Низкая точность формирования датчиковых сигналов таким устройством обусловлена большой нелинейностью преобразовательных цепей. Наличие большого количества функциональных блоков устройства приводит к увеличению его энергопотребления с нарушением реализации принципа автономности, а также к снижению надежности функционирования. Кроме того, данное устройство не отвечает условиям надежности в круглосуточном режиме функционирования из-за отказов составных преобразовательных блоков, т.е. из-за отсутствия диагностики состояния преобразовательных блоков устройства.
В направлении реализации данного технического решения авторам известны устройства диагностики блоков аппаратуры связи на основе принципов тестового и функционального контроля (Шляпоберский Б.Я. Основы техники передачи дискретных сообщений. - М.: Радио и связь, 1973. - 327 с.). Применимо к заявляемому объекту тестовый контроль частично выполнен в соответствии алгоритма функционирования МПСУ. Использование принципа функционального контроля аппаратуры устройства значительно увеличивает его габаритные размеры, приводит к снижению надежности функционирования заявляемого объекта.
Задача изобретения - повышение точности измерений входных датчиковых сигналов и надежности функционирования устройства.
Поставленная задача достигается тем, что в известную микропроцессорную систему защиты, содержащую блоки датчиков, блоки питания, регистратор, канал преобразования, включающий блок масштабирования сигналов, блок нормализации сигналов, формирователь сигналов контроля и диагностики, аналого-цифровой преобразователь и микропроцессорную систему управления (МПСУ) выходными реле и сигнализацией в соответствии с алгоритмом защиты, первая группа входов-выходов которой является группой входов-выходов регистратора, а вторая группа - управляющими выходами объекта защиты и сигнализации, дополнительно введены резервные каналы преобразования, регистраторы и управляемые блоки питания, выходы блока датчиков подключены параллельно к входам основного и резервного каналов преобразований, являющихся входами соответствующих блоков коммутаторов, в каждом из каналов преобразований группы выводов информационных сигналов с выходов блоков коммутаторов подключены через соответствующие блоки масштабирования к выводам группы информационных входов микропроцессорной системы управления, третьи группы входов-выходов которой подключены к выводам соответствующих управляемых блоков питания, а четвертые группы входов-выходов - основной и резервной МПСУ соединены между собой, в каждом канале преобразования каждый пятый одноразрядный выход МПСУ подключен к входу соответствующего блока коммутаторов, а шестые одноразрядные выходы основной и резервной МПСУ подключены к входам блоков коммутаторов в соответствующем резервном и основном каналах преобразований, седьмой одноразрядный выход основной МПСУ подключен к входу резервного управляемого блока памяти, восьмой одноразрядный выход резервной МПСУ подключен к входу основного управляемого блока памяти.
Кроме этого, каждый управляемый блок питания содержит нестабилизируемый блок питания, выход которого через формирователь сигналов контроля и диагностики связан с нормирующим усилителем для обработки сигналов потребляемых токов аппаратуры, другой вывод которого связан со стабилизатором напряжения, причем управляемый вывод входного ключа нестабилизируемого блока питания соединен с одноразрядным выводом МПСУ, а выходного ключа через логический элемент И - с одноразрядными выводами основного и резервного МПСУ.
Кроме того, формирователь сигналов контроля и диагностики выполнен в виде электронного предохранителя.
Сопоставительный анализ изобретения с прототипом показывает, что предлагаемое устройство отличается от известного введением основного и резервного каналов преобразований, а также регистраторов и управляемых блоков питания, что позволяет получить новые свойства вне зависимости от точности измерений входных сигналов датчиков и тем самым повысить точность измерений. Кроме этого, новые функциональные связи обеспечивают повышение надежности работы как системы управления нагрузками, так и аппаратурных трактов устройства, что позволяет сделать вывод о существенных отличиях предлагаемого устройства.
Таким образом, заявляемый объект соответствует критерию «новизна». Заявителю неизвестны технические решения, содержащие сходные признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии заявляемого решения критерию «изобретательский уровень».
Существо изобретения поясняется чертежами.
На фиг.1 приведена структурная схема устройства.
На фиг.2 представлена блок-схема коммутации и масштабирования сигналов датчиков в основном канале преобразования.
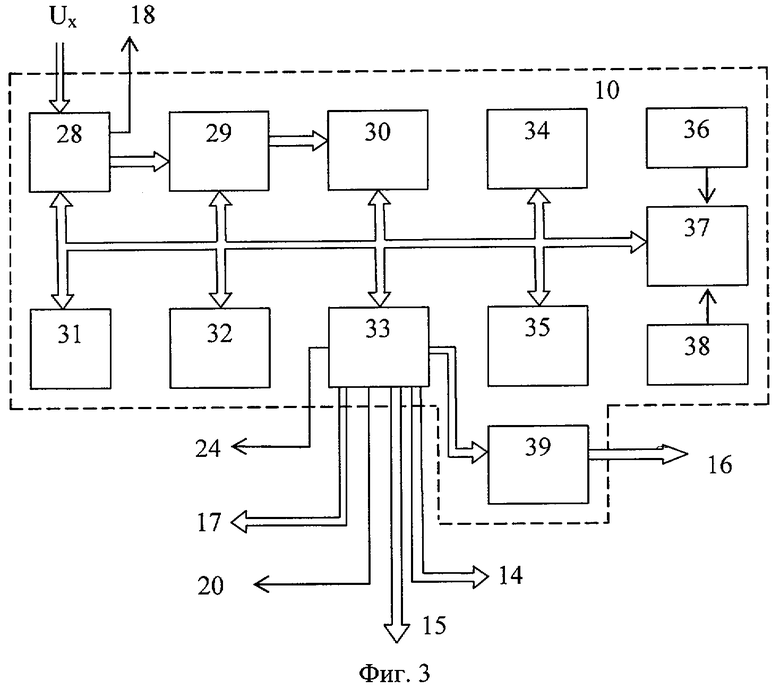
На фиг.3 изображена структурная схема микропроцессорной системы управления.
На фиг.4 приведена блок-схема управляемого блока питания.
На фиг.1 обозначены:
1 - блок датчиков; 2 - основной канал преобразования; 3 - резервный канал преобразования; 4 - основной регистратор; 5 - резервный регистратор; 6 - основной управляемый блок питания; 7 - резервный управляемый блок питания; основной канал преобразования 2 включает блок коммутаторов 8, блок масштабирования 9 и МПСУ 10; резервный канал преобразования 3 включает блок коммутаторов 11, блок масштабирования 12 и МПСУ 13;
14 - первая группа входов-выходов основной МПСУ для связи с основным регистратором; 15 - вторая группа выходов основной МПСУ для управления объектом; 16 - третья группа входов-выходов основной МПСУ для связи с основным управляемым блоком питания; 17 - четвертая группа входов-выходов основной МПСУ для связи с резервной МПСУ; 18 - пятый одноразрядный выход основной МПСУ для связи с основным блоком коммутаторов; 19 - шестой одноразрядный выход основной МПСУ для связи с резервным блоком коммутаторов; 20 - седьмой одноразрядный выход основной МПСУ для связи с резервным управляемым блоком питания; 21 - первая группа входов-выходов резервной МПСУ для связи с резервным регистратором; 22 - вторая группа выходов резервной МПСУ для управления объектом; 23 - третья группа входов-выходов резервной МПСУ для связи с резервным управляемым блоком питания; 24 - пятый одноразрядный выход резервной МПСУ для связи с резервным блоком коммутаторов; 25 - шестой одноразрядный выход резервной МПСУ для связи с основным блоком коммутаторов; 26 - седьмой одноразрядный выход резервной МПСУ для связи с основным управляемым блоком питания.
На фиг.2 обозначены:
T1 - трансформаторная обмотка датчика на однофазном объекте управления; 8 - одна декада основного блока коммутаторов, состоящая из двухвходового логического элемента И (ИМС типа 564 ЛА7) и ключа S (ИМС типа 590 КН13); 9 - одна декада блока масштабирования, состоящая из операционного усилителя 27, резистора R, диода VD, транзистора VT и конденсатора С; 10 - основная МПСУ; 11 - резервный блок коммутаторов; 13 - резервная МПСУ; 25 - шестой одноразрядный выход резервной МПСУ для связи с основным блоком коммутаторов; Ux - шина информационных сигналов.
На фиг.3 обозначены:
28 - первый порт ввода информационных сигналов; 29 - мультиплексор; 30 - аналого-цифровой преобразователь; 31 - буферные регистры; 32 - шинные формирователи; 33 - второй порт ввода-вывода данных; 34 - ОЗУ; 35 - флэш-ПЗУ; 36 - таймер; 37 - микропроцессор; 38 - блок ручной установки; 39 - драйвер связи с ПЭВМ; Ux - шина информационных сигналов.
На фиг.4 обозначены:
40 - блок питания аппаратурного тракта; 41 - формирователь сигналов контроля и диагностики; 42 - нормирующий усилитель; 43 - стабилизатор напряжения; причем блок питания 40 состоит из входного S1 и выходного S2 ключей, зарядного устройства 44 и аккумуляторов А; формирователь сигналов контроля и диагностики 41 состоит из управляющего транзистора VT, светодиода VD, тиристора VD и резисторов R1, R2 и R3; нормирующий усилитель 42 состоит из резисторов R4, R5 и операционного усилителя 45.
Блок датчиков 1 (см. фиг.1) предназначен для преобразования величины переменного ˜Iх тока нагрузки объекта управления в соответствующую величину переменного напряжения сигнала ˜Ux. При этом разрядные выходы блока датчиков 1 подключены параллельно к входам основного 2 и резервного 3 каналов преобразования. Основной 2 и резервный 3 каналы преобразования содержат идентичный состав блоков для выполнения одинаковых функций. Основное их предназначение - предотвращение аварийных ситуаций в случае выхода из строя одного из их элементов, увеличение срока службы устройства, удобство в эксплуатации (выполнение своевременной замены блоков устройства, реализованных по модульной структуре) и увеличение надежности функционирования во время круглосуточной эксплуатации объекта. Поэтому в устройство дополнительно введены основные и резервные регистраторы 4 и 5, а также управляемые блоки питания 6 и 7.
В качестве регистраторов 4 и 5 использованы жидкокристаллические модули для визуализации текущей информации, а также параллельное подключение переносных ПЭВМ. Управляемые блоки питания 6 и 7 выполняют функции питания аппаратурного тракта в отведенное время круглосуточного режима работы объекта.
Входами основного канала преобразования 2 являются входы блока коммутаторов 8, выходы которого через информационную шину сигналов переменного напряжения ˜Ux связаны с входами блока масштабирования 9, выполненного в виде амплитудного детектора. Выходы блока масштабирования 9 соединены через информационную шину сигналов Ux с входом первого порта МПСУ 10. Аналогично этому входами резервного канала преобразования 3 являются входы блока коммутаторов 11, выходы которого через информационную шину сигналов переменного напряжения ˜Ux связаны с входами блока масштабирования 12, выполненного в виде амплитудного детектора. Выходы блока масштабирования 12 соединены через информационную шину сигналов Ux с входом первого порта МПСУ 13.
Основной регистратор 4 связан с МПСУ 10 через первую группу входов-выходов 14, вторая группа выходов 15 основной МПСУ реализует связь с объектом в соответствии выработанному алгоритму защиты, третья группа входов-выходов 16 связывает основную МПСУ 10 с основным управляемым блоком питания 6, основная МПСУ 10 связана с резервной МПСУ 17 через четвертую группу входов-выходов, пятый одноразрядный выход 18 основной МПСУ связан с основным блоком коммутаторов 8, его шестой одноразрядный выход 19 связан с резервным блоком коммутаторов 11, а седьмой одноразрядный выход 20 - с входом резервного управляемого блока питания 7. При этом резервный регистратор 5 соединен с резервной МПСУ 13 через первую группу входов-выходов 21, вторая группа выходов 22 резервной МПСУ 13 реализует связь с объектом в соответствии с выработанным алгоритмом защиты, третья группа входов-выходов 23 связывает резервную МПСУ 13 с резервным управляемым блоком питания 7, пятый одноразрядный выход 24 резервной МПСУ 13 связан с резервным блоком коммутаторов 11, шестой одноразрядный выход 25 резервной МПСУ 13 связан с основным блоком коммутаторов 8, седьмой одноразрядный выход 26 резервной МПСУ 13 связан с основным управляемым блоком питания 6.
Количество датчиков в блоке 1 (см. фиг.2) выбирается в зависимости от числа используемых фаз питающих напряжений на объекте. Для однофазной нагрузки предусматривается размещение провода питания через внутреннее сечение круглого (например, ферритовое или альсиферовое для высокочастотных напряжений питания или стальное для низкочастотных цепей) или прямоугольного кольца сердечника. В этом случае первичной обмоткой токового трансформатора является полупетля питающего провода, а намотанная обмотка (порядка 100 витков) на кольце сердечника является выходной обмоткой блока датчика 1. Поэтому один вывод вторичной обмотки трансформатора подключен к нулевой шине, а другой - ко входам основного 2 и резервного 3 каналов преобразования, являющиеся входами блоков коммутаторов 8 и 11 соответственно. В случае реализации трехфазной нагрузки предусматривается использование трех однотипных датчиков 1 для каждой фазы питания объекта. Для трехфазных цепей могут использоваться стандартные датчики типа МСР 60× (601, 602, 603 или 604) фирмы Microchip. При этом количество фаз питания не регламентируется в случае многофазных нагрузок.
МПСУ 10 и 13 предназначены для преобразования аналоговых сигналов датчиков 1 в цифровую форму с целью их дальнейшей обработки и выработки управляющих воздействий на объект, а также возможностей переключении с основного канала преобразования 2 на резервный 3. Функциональные блоки основного 10 и резервного 13 МПСУ соответствуют (см. фиг.3) схеме серийно выпускаемого микроконтроллера MSP430F169 фирмы Texas Instruments. В состав этого контроллера дополнительно включен драйвер связи с ПЭВМ 39.
Управляемые блоки питания 6 и 7 выполнены (см. фиг.4) на основе одинаковых функциональных блоков. На примере схемы управляемого блока питания 6 основного канала преобразования 2 установлена взаимосвязь составных блоков питания 40 через формирователь сигналов контроля и диагностики 41 с входами нормирующего усилителя 42 и стабилизатора напряжения 43. При этом блок питания 40 состоит из зарядного устройства 44, на входе которого первый ключ S1 управляется основным МПСУ 10, а на выходе второй ключ S2 с выводом аккумулятора А (≈12 В) - основной 10 и резервной 13 МПСУ через логический элемент И.
Нормально-замкнутый контакт выходного ключа S2 блока питания 40 связан с входом формирователя сигналов контроля и диагностики 41, выполненного в виде электронного предохранителя 41. Сущность работы его заключается в формировании аварийных сигналов для переключении с одного канала преобразования на другой. Это реализуется за счет непрерывного слежения тока потребления аппаратурного тракта через нормирующий усилитель 42 и стабилизатор напряжения 43. В качестве стабилизатора напряжения 43 используется ИМС 142ЕН5 для выработки выходного напряжения Uвых=+6,6 В. Это напряжение поступает на выходной симметрирующий каскад с искусственной нулевой шиной. Поэтому на выходах стабилизатора напряжений 43 формируются выходные напряжения U1,2=±3,3 В.
Градуировка узла первичного преобразования сигналов с объекта управления осуществляется (см. фиг.2) в результате выбора критических значений сопротивлений нагрузки. Причем минимальному значению нагрузки двигателя выставляется режим его работы в ненагруженном состоянии при токе потребления в одной из фаз (например, А) величиной Iп.мин=1 А. Максимально нагруженному состоянию двигателя выставляется ток потребления одной из фаз величиной Iп.макс=100 А. При этом минимально нагруженному состоянию двигателя соответствует амплитуда напряжений с выхода датчика 1 величиной Uмин=0,1 В, а максимально нагруженному - Uмакс=2,1 В. Изменяя напряжение смещения нуля в операционном усилителе 27 блока масштабирования 9 устанавливается диапазон аналоговой детектированной величины от 0,1 В до 2,1 В. Выбор нижнего порогового значения в 0,1 В обусловлен необходимостью дополнительного контроля снижаемого напряжения питания объекта, например, в результате перекоса фаз.
Градуировка нормирующего усилителя 42 (см. фиг.4) в управляемом блоке питания 6 (или 7) реализуется в двух граничных значениях тока потребления устройства. Нижнему значению соответствует номинальный ток потребления величиной Iн.пот=10 мА, при выходном напряжении Uвых≈11 В с выхода электронного предохранителя, соответствующий номинальному току потребления одного из каналов преобразования 2 или 3. В этом случае на выходе операционного усилителя 45 нормирующего усилителя 42 вырабатывается полярное напряжение Uн.мин=0,1 В. Верхнему граничному значению тока потребления Iв.макс=30 мА с выхода электронного предохранителя 41 соответствует выходное напряжение нормирующего усилителя 42 величиной Uв.макс=1,1 В, получаемое при дополнительном настроечном шунтировании блока балластным резистором входных выводов стабилизатора напряжения 43.
После завершения программирования МПСУ 10 и 13 (см. фиг.1) осуществляется отладка устройства в комплексе основного 2 и резервного 3 каналов преобразования при имитации сигналов датчиков 1 величиной амплитуды напряжения в середине диапазона с напряжением в 0,5 В. Сущность отладки сводится к выполнению переключении функциональных блоков основного 2 и резервного 3 каналов преобразования через 12 часов беспрерывной работы.
Принцип работы устройства заключается в следующем. При работе объекта управления блок датчиков 1 непрерывно генерирует амплитудный сигнал с частотой напряжения питания. В первичном запуске устройства осуществляется подключение (см. фиг.1) основного канала преобразования 2 и отключение функциональных блоков резервного канала преобразования 3. При этом МПСУ 10 выполняет отключение МПСУ 13 и управляемый блок питания 7 в резервном канале преобразования по шинам 17 и 20.
В номинальном режиме работы двигателя с выходов токовых трансформаторов блока датчика 1 (см. фиг.2) вырабатываются изменяющиеся амплитуды напряжений в рабочем диапазоне, которые поступают на входы основного канала преобразования 2, являющиеся выводами ключей S блока ключей 8. Эти ключи находятся в нормально-замкнутом состоянии, т.к. МПСУ 10 вырабатывает постоянный сигнал разрешения по шине 18 через элемент И. Нормально-замкнутые контакты ключей S блока ключей 8 подают изменяющееся амплитудное напряжение на вход блока масштабирования, являющийся входом амплитудного детектора 27. Поэтому девиация амплитуд напряжений датчиков 1 преобразуется в изменяемое полярное напряжение. Такой аналоговый сигнал поступает на порт ввода-вывода 28 МПСУ 10.
В соответствии с алгоритмом преобразований в МПСУ 10 (см. фиг.3) исходный аналоговый сигнал поступает с порта 28 через мультиплексор 29 на вход аналого-цифрового преобразователя 30, откуда в цифровой форме записывается в регистр 31 для последующей обработки в микропроцессоре 37. Микропроцессор 37 вырабатывает цифровые сигналы в шинах адресов и данных через второй порт ввода-вывода 33 для функционирования драйвера связи 39 с ПЭВМ 4.
По истечению времени функционирования (через каждые 12 ч) основных функциональных блоков устройства микропроцессор 37 вырабатывает через порт 33 и шину 20 сигнал разрешения на включение резервного управляемого блока питания 7, который запитывает в резервном канале преобразования 3 аппаратурные тракты блоков коммутации 11, масштабирования 12 и МПСУ 13. В соответствии с алгоритмом преобразований МПСУ 10 передает вначале функции преобразования МПСУ 13, а затем подключает резервный блок коммутаторов 11. В последующем временном такте МПСУ 13 отключает основной блок коммутаторов 8 и управляемый блок питания. Режим работы резервного канала преобразования 3 аналогичен вышерассмотренному режиму работы основного канала 2 и отличается визуализацией данных на подключаемом резервном регистраторе 5.
В критическом режиме работы устройства различаются предаварийные и аварийные состояния объекта. Предаварийному состоянию соответствует значения полярных сигналов датчиков порядка от 2,1 В до 2,11 В, а аварийному - от 2,1 В и выше. В последнем случае МПСУ 13 по шине 22 вырабатывает сигнал отключения объекта. Сигналы предаварийного состояния фиксируются в регистраторе 5 с целью предварительного оповещения обслуживающего персонала.
Выполнение функционального контроля и коммутации основного управляемого блока питания 6 реализуется аналогично блоку 7 (см. фиг.4). В нормальном режиме функционирования первичному подключению блока 6 соответствует соединение в блоке питания 40 зарядного устройства 44 к сетевому напряжению через нормально-замкнутый ключ S1, а также включение выходного напряжения сигналом элемента И через ключ S2 на вход электронного предохранителя 41. При этом предаварийному состоянию аппаратуры устройства соответствует значения тока потребления величиной 2×Iн.пот≈25 мА, а аварийному - от 30 мА и выше, соответствующие выходным напряжениям с нормирующего усилителя 42 в величинах 1,1 В и 1,11 В соответственно. В последнем случае МПСУ 10 по шине 20 вырабатывает сигнал на вход включения резервного управляемого блока питания 7, а по шине 17 - включение МПСУ 13. Аналогично вышерассмотренному осуществляется переключение аппаратуры с основного 2 на резервный 3 каналы преобразования. Сигналы предаварийного состояния функционального контроля трактов аппаратуры фиксируются в регистраторе 5 с целью предварительного оповещения обслуживающего персонала.
Таким образом, применение предлагаемого устройства обеспечивает контроль круглосуточного режима работы объекта управления. Технико-экономические преимущества изобретения заключаются в повышении повышение точности измерений входных датчиковых сигналов, безотказности устройства и надежности функционирования на объекте управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЗАЩИТЫ | 2000 |
|
RU2173924C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| Многоканальное регистрирующее устройство | 1988 |
|
SU1698899A1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ПОЖАРНОЙ СИГНАЛИЗАЦИИ И ПОЖАРОТУШЕНИЯ | 2023 |
|
RU2813221C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОПЕРЕКАЧИВАЮЩИМ АГРЕГАТОМ "КВАНТ-Р" | 2017 |
|
RU2660216C1 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ РАСПРЕДЕЛИТЕЛЯ ШИХТЫ ДОМЕННОЙ ПЕЧИ | 1998 |
|
RU2126056C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ЭЛЕКТРОПОЕЗДА | 2018 |
|
RU2733594C2 |
| АППАРАТУРА УПРАВЛЕНИЯ И ЗАЩИТЫ ФИДЕРА ПОСТОЯННОГО ТОКА | 2011 |
|
RU2453959C1 |
| КОНТРОЛЛЕР ДИАГНОСТИКИ И ЗАЩИТЫ | 2003 |
|
RU2256993C2 |


Изобретение относится к области электротехники и может быть использовано в технике релейной защиты объектов с электрическими нагрузками, например однофазных и трехфазных двигателей. Техническим результатом является повышение точности измерений входных сигналов датчиков и надежности функционирования устройства. В микропроцессорной системе защиты введены регистраторы, управляемые блоки питания, соединенные с остальными элементами микропроцессорной системы защиты в соответствии с формулой изобретения. 2 з.п. ф-лы, 4 ил.
| МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО РЕЛЕЙНОЙ ЗАЩИТЫ И АВТОМАТИКИ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2222083C2 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЗАЩИТЫ | 2000 |
|
RU2173924C1 |
| Способ защиты сосредоточенных энергообъектов от внутренних коротких замыканий | 1985 |
|
SU1422296A1 |
| Способ защиты асинхронного электродвигателя от перегрузки | 1988 |
|
SU1642548A1 |
| DE 3111255 A1, 30.09.1982 | |||
| ПОЧВЕННЫЙ ИНЪЕКТОР | 2001 |
|
RU2223636C2 |
| Экономайзер | 0 |
|
SU94A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |

