Изобретение относится к электронным схемам общего назначения, а именно к кодированию, декодированию и преобразованию кода с использованием подвижных считывающих устройств, и может быть использовано, в частности, для управления приводом вращения корабельной антенны посредством преобразованных в цифровой код ее угловых перемещений.
Известен преобразователь угла поворота вала в код, содержащий излучатели, измерительный и индикаторный растры, фотоприемники грубого, среднего и точного отсчета, интерполятор среднего и точного отсчета, блоки элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, блоки компараторов, матричный блок, формирователь опорного напряжения (а.с. СССР №1176453, кл. Н03М 1/24,1983).
В данном преобразователе применен компенсационный метод формирования дискретных сигналов, т.е. растры измерительного и индикаторного дисков образуют две группы, которые выполнены максимально близко одна к другой. Такое расположение растров позволяет формировать сигналы, дополнительно модулированные относительно нулевого уровня с фазовым соотношением 0°, 90°, 180° и 270°. Наличие опережающих относительно нулевого уровня сигналов позволяет устранить влияние дефектов изготовления элементов преобразователя, но не обеспечивает формирование упреждающего импульса начала торможения.
Известен способ преобразования угла поворота вала в код и устройство для его осуществления, содержащий преобразователи угла поворота вала в аналоговые сигналы, излучатели, измерительный и индикаторный растры, фотоприемники, усилители, блоки смещения сигнала, выполненные в виде суммирующих усилителей, регулируемый источник и делители постоянных напряжений, инверторы, элементы ИСКЛЮЧАЮЩЕЕ ИЛИ, коммутаторы, аналого-цифровой преобразователь (а.с. СССР №1711328, кл. Н03М 1/24, 1988).
Данные способ и устройство основаны на преобразовании угла поворота вала в сдвинутые по фазе относительно друг друга аналоговые сигналы и предназначены для повышения точности за счет формирования сдвинутых по фазе относительно друг друга цифровых сигналов из аналоговых, исключая при этом влияние формы аналоговых сигналов. Однако наличие цифровых сигналов с фазовым смещением не обеспечивает формирование упреждающего импульса начала торможения.
Наиболее близким аналогом является фотоэлектрический преобразователь угол-код, содержащий измерительный и индикаторный растры, блоки излучателей, блоки фотоприемников, дешифратор, коммутатор, счетчик, усилитель (патент РФ №2076456, кл. Н03М 1/28, 1997).
В данном устройстве взаимодействующие растры текущей координаты обеспечивают импульсный характер работы излучателей, который определяет их пониженное энергопотребление, а распределение групп измерительного растра по окружности позволяет формировать осредненные импульсы текущей координаты. Растры формируют сигналы фотопреобразования малой амплитуды в моменты единичных совпадений элементов растра, что происходит ввиду переменного шага расположения этих элементов, а в момент совпадения всех элементов растра - сигнал максимальной амплитуды, который формирует строб-импульс текущей координаты с высокой точностью. Данное устройство формирует импульсы текущей координаты с высокой точностью, но не определяет текущую координату точки упреждающего импульса начала торможения.
Задачей, на решение которой направлено предлагаемое изобретение, является создание устройства, позволяющего посредством плавного снижения частоты вращения уменьшить действие сил инерции вращения антенны корабля на механизмы при торможении в нулевой точке, соответствующей походному положению антенны корабля. Ввиду того что антенна имеет значительные габариты и вес, торможение и останов в нулевой точке без снижения частоты вращения может привести к поломкам механизмов.
Технические результаты состоят в повышении надежности и долговечности привода вращения антенны вследствие снижения действия сил инерции вращения на механизмы в момент торможения и останова, в отсутствии механического удара, приводящего к поломкам механизмов, а также в повышении точности останова антенны в нулевой точке, соответствующей походному положению антенны корабля.
Влияние на достижение указанных технических результатов оказывают следующие существенные признаки: в устройстве преобразования угла поворота вала в код, содержащем коммутатор, блок излучателей, измерительный растр, индикаторный растр, блок фотоприемников, усилитель, счетчик, дешифратор, привод поворота, имеется блок управления и преобразователь, причем первый выход коммутатора соединен с входом блока излучателей, второй выход коммутатора соединен с первым входом блока управления, выход блока управления соединен с входом привода поворота, выход привода поворота соединен с входом измерительного растра и с входом объекта, блок излучателей соединен оптической связью через измерительный растр и индикаторный растр с блоком фотоприемников, выход блока фотоприемников соединен с входом преобразователя, выход преобразователя соединен с входом усилителя, выход усилителя соединен с входом счетчика, выход счетчика соединен с входом дешифратора, выход дешифратора соединен со вторым входом блока управления.
Отличительными от прототипа признаками в предлагаемом устройстве являются наличие блока управления, преобразователя, дешифратора, запрограммированного на формирование упрежденного импульса начала торможения, а также выполнение связей между элементами функциональной схемы.
На чертеже приведена функциональная схема преобразователя угла поворота вала в код.
Преобразователь угла поворота вала в код содержит коммутатор 1, блок управления 2, привод поворота 3, блок излучателей 4, измерительный растр 5, индикаторный растр 6, блок фотоприемников 7, преобразователь 8, усилитель 9, счетчик 10, дешифратор 11.
Подключение питания, включение, выключение вращения, изменение частоты вращения привода поворота 3 объекта 12 осуществляется от коммутатора 1. Коммутатор 1 представляет собой набор кнопочных выключателей и вынесен на пульт управления кораблем.
Блок управления 2 предназначен для управления приводом поворота 3. Блок управления 2 вырабатывает сигналы включения плавного снижения частоты вращения, торможения и останова объекта 12 в нулевой точке, соответствующей походному положению антенны корабля.
Привод поворота 3 осуществляет вращение, изменение частоты вращения и торможение измерительного растра 5 и объекта 12. Включение, выключение вращения, изменение частоты вращения осуществляется посредством полупроводникового преобразователя частоты (не показан). Торможение осуществляется электромагнитным тормозом (не показан).
Блок излучателей 4 предназначен для создания параллельного пучка света, проходящего через измерительный растр 5 и индикаторный растр 6. Измерительный растр 5 и индикаторный растр 6 осуществляют масштабное преобразование угла поворота объекта 12. Блок фотоприемников 7 осуществляет преобразование промодулированного светового излучения в электрические сигналы. Преобразователь 8 производит окончательную обработку информации об угле поворота объекта 12 и вырабатывает последовательность импульсов цифрового кода угла поворота. Счетчик 10 производит подсчет импульсов и определяет направление вращения объекта 12. Дешифратор 11 производит формирование упрежденного импульса начала торможения. Время упреждения импульса начала торможения определяется опытным путем и программируется в дешифраторе 11. Время упреждения зависит от частоты вращения объекта 12, т.е. чем больше частота вращения, тем раньше производится включение снижения частоты вращения. Время упреждения также зависит от массы объекта, сил трения в механизмах, препятствующих вращению, и других факторов, влияющих на инерционность объекта 12. Также учитывается направление вращения объекта 12.
Первый выход коммутатора 1 соединен с входом блока излучателей 4. Второй выход коммутатора 1 соединен с первым входом блока управления 2. Выход блока управления 2 соединен с входом привода поворота 3. Выход привода поворота 3 соединен с входом измерительного растра 4 и с входом объекта 12. Блок излучателей 4 соединен оптической связью через измерительный растр 5 и индикаторный растр 6 с блоком фотоприемников 7. Выход блока фотоприемников 7 соединен с входом преобразователя 8. Выход преобразователя 8 соединен с входом усилителя 9. Выход усилителя 9 соединен с входом счетчика 10. Выход счетчика 10 соединен с входом дешифратора 11. Выход дешифратора 11 соединен со вторым входом блока управления 2.
Преобразователь угла поворота вала в код работает следующим образом.
При поступлении от коммутатора 1 в блок управления 2 команды «ПУСК» в блоке управления 2 вырабатывается сигнал включения вращения, который поступает в привод поворота 3, где производится расторможение и включение вращения измерительного растра 5 и объекта 12. При поступлении от коммутатора 1 в блок управления 2 команды на изменение частоты вращения измерительного растра 5 и объекта 12 в блоке управления 2 вырабатывается сигнал изменения частоты вращения, который поступает в привод поворота 3, где производится изменение частоты вращения измерительного растра 5 и объекта 12.
При вращении измерительного растра 5 и объекта 12 пучок света из блока излучателей 4 через измерительный растр 5 и индикаторный растр 6 поступает в блок фотоприемников 7. Далее электрические сигналы промодулированного светового излучения поступают в преобразователь 8. Из преобразователя 8 последовательность импульсов, преобразованная из электрических сигналов промодулированного светового излучения, поступает в усилитель 9. Из усилителя 9 последовательность импульсов поступает в счетчик 10. Из счетчика 10 последовательность импульсов поступает в дешифратор 11. Из дешифратора 11 выработанный упрежденный импульс начала торможения поступает в блок управления 2. Посредством упрежденного импульса начала торможения в блоке управления 2 вырабатываются сигналы включения плавного снижения частоты вращения, торможения и останова объекта 12 в нулевой точке, соответствующей походному положению антенны корабля.
При поступлении от коммутатора 1 в блок управления 2 команды «СТОП» на останов объекта 12 в нулевой точке упрежденный импульс начала торможения вырабатывает в блоке управления 2 сигнал снижения частоты вращения. Сигнал включения снижения частоты вращения, выработанный упрежденным импульсом начала торможения в блоке управления 2, поступает в привод поворота 3, где производится включение плавного снижения частоты вращения. При достижении заданной пониженной частоты вращения объекта 12, при которой не может произойти поломок механизмов, в блоке управления 2 вырабатывается сигнал отключения вращения, который поступает в привод поворота 3 и производит отключение вращения объекта 12. После отключения вращения объект 12 некоторое время продолжает вращение по инерции, постепенно еще больше снижая частоту вращения. В нулевой точке по сигналу включения торможения, выработанному в блоке управления 2, в приводе поворота 3 производится торможение и останов объекта 12.
Таким образом, при выполнении команды «СТОП» происходит плавное снижение частоты вращения объекта 12, отключение вращения, торможение и останов в нулевой точке, а действие сил инерции вращения антенны на механизмы при торможении минимально, что позволяет повысить надежность и долговечность механизмов антенны, точность останова в нулевой точке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГОЛ - КОД | 1991 |
|
RU2076456C1 |
| Устройство для измерения угла поворота вала | 1990 |
|
SU1772629A1 |
| ЦИФРОВАЯ СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2004 |
|
RU2256298C1 |
| ЦИФРОВАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ | 1996 |
|
RU2128890C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| ЦИФРОВАЯ СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2003 |
|
RU2246801C1 |
| Устройство для отображения радиолокационной информации на экране электронно-лучевой трубки | 1989 |
|
SU1691880A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА В ПОСЛЕДОВАТЕЛЬНОСТЬ ИМПУЛЬСОВ | 1991 |
|
RU2025043C1 |
| Фотоэлектрический преобразователь перемещения в код | 1985 |
|
SU1292182A1 |
Изобретение относится к электронным схемам общего назначения, а именно к кодированию, декодированию и преобразованию кода, и может быть использовано, в частности, для управления приводом вращения корабельной антенны посредством преобразованных в цифровой код угловых перемещений антенны. Технический результат - повышение надежности и долговечности привода вращения антенны вследствие снижения действия сил инерции вращения в момент торможения и останова, отсутствие механического удара, приводящего к поломкам механизмов, а также повышение точности останова антенны в нулевой точке. Преобразователь угла поворота вала в код содержит коммутатор, блок управления, привод поворота, блок излучателей, измерительный и индикаторный растры, блок фотоприемников, преобразователь, усилитель, счетчик, дешифратор. При вращении объекта производится формирование упрежденного импульса торможения, при поступлении которого в блок управления вырабатываются сигналы переключения на пониженную частоту вращения, отключения вращения, задержки включения торможения и торможения. При выполнении команды «СТОП» происходит плавное снижение частоты вращения, отключение вращения, торможение и останов в нулевой точке, а действие сил инерции вращения антенны на механизмы сведены к минимуму. 1 ил.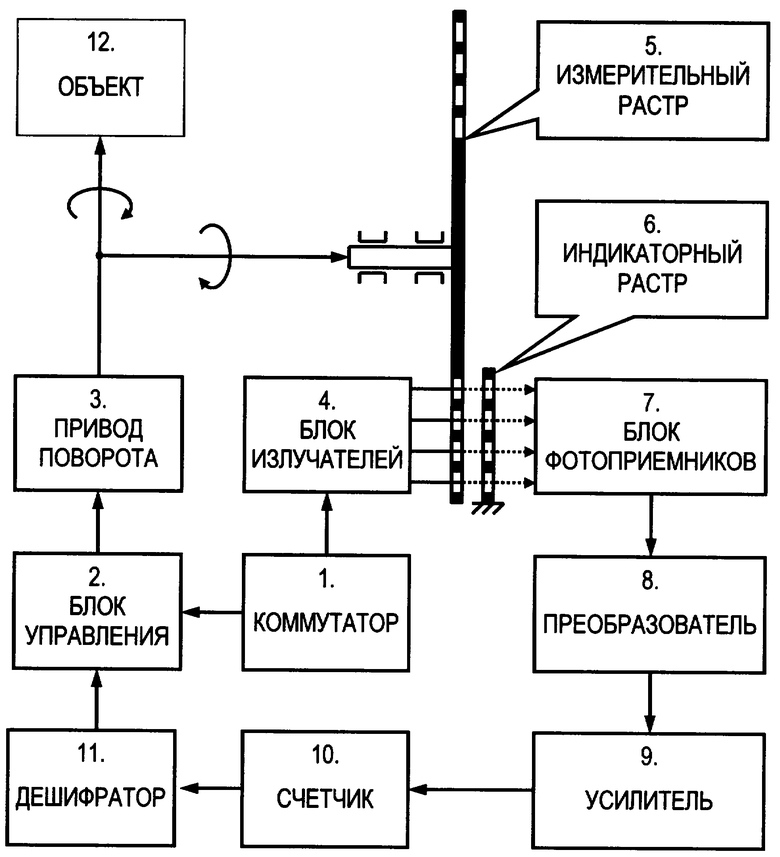
Преобразователь угла поворота вала в код, содержащий коммутатор, блок излучателей, измерительный растр с приводом поворота, индикаторный растр, блок фотоприемников, усилитель, счетчик, дешифратор, причем первый выход коммутатора соединен с входом блока излучателей, выход блока излучателей через измерительный и индикаторный растры соединен оптической связью с входом блока фотоприемников, отличающийся тем, что в него введен блок управления и преобразователь, причем второй выход коммутатора соединен с первым входом блока управления, выход блока управления соединен с входом привода поворота, выход привода поворота соединен с входом объекта и с входом измерительного растра, выход блока фотоприемников соединен с входом преобразователя, выход преобразователя соединен с входом усилителя, выход усилителя соединен с входом счетчика, выход счетчика соединен с входом дешифратора, дешифратор запрограммирован на формирование упрежденного импульса начала торможения, а его выход соединен с входом блока управления.
| ФОТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГОЛ - КОД | 1991 |
|
RU2076456C1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1988 |
|
SU1711328A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1176453A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |

