Изобретение относится к контрольно- измерительной технике и может быть ис- пояьзовано для контроля параметров движения, в частности для высокоточного измерения углов поворота.
Известны устройства, использующие для измерений угла последовательность импульсов, определяющие угол через время (хронометрические системы) или частоту.
Наиболее близким к изобретению является устройство, содержащее корпус, модулятор, привод, импульсные датчики, шкалу в виде n-штрихового растра, поворотную втулку, вал, шкалу в виде z-штрихового растра, штрих, соответствующий начальному отсчету шкал, амплитудный дискриминатор, подключенный к импульсным датчикам, коммутатор, блок измерения временного интервала, блок усреднения, блок вычисления, регистратор, блок синхронизации и диск. Это устройство работает следующим образом. Модулятор, вращаемый приводом с постоянной скоростью, своими растровыми п- и z-шкалами возбуждает импульсы тока на выходе двух, неподвижных и двух подвижных, связанных с валом, датчиков. Импульсы от шкал за исключением тех, которые возбуждаются маркированным штрихом, одинаковы по своим параметрам. За один оборот модулятора возникают четыре маркированных импульса, соответствующие маркированному штриху. Основным режимом работы является измерение угла поворота с помощью ft-шкалы и сопряженных с ней одного подвижного и одного неподвижного датчиков. Импульсы с датчиков поступают на вход коммутатора, который подключен к амплитудному дискриминатору. Последний выдает на блок измерения два потока импульсов: первый содержит все импульсы без исключения, а второй только маркированные импульсы, блок производит измерения временных интервалов между двумя соседними импульсами поочередно поступающими с подвижного и неподвижного датчиков, а также определяет число m путем подсчета числа импульсов, поступающих с одного из датчиков на интервале времени между двумя последовательными маркированными импульсами. Блок усреднения выполняет операцию по формуле
Т,(„)
Ti,
I 1
где TI - временные интервалы между импульсами, поочередно поступающими с подвижного и неподвижного датчиков и выдает результат на вход блока вычисления,
на второй вход которого поступает сигнал, соответствующий значению т. В этом блоке искомый угол поворота определяется по формуле
)-т+К-Т|(п),
где #о(п) - угол, соответствующий величине периода о - шкалы (афг360/п); m - число
углов Оф), укладывающихся в измеряемом угле; Т|(П) - среднее арифметическое из п последовательных временных интервалов TI между импульсами, поочередно поступающими с подвижного и неподвижного датчиков; К - коэффициент преобразования ед.угяа/ед.времени.
В случае, когда измеряемый угол попадает в окрестность значений, кратных величине периода n-шкалы и возникает
опасность сбоя, штрих на растровой шкале занимает такое положение, при котором срабатывает пятый датчик и коммутатор переключает входы амплитудного дискриминатора на другие подвижный и неподвижный датчики, работающие с z-шка- лой и измерения происходят аналогично первому случаю.
Недостатком этого устройства является недостаточная точность измерения, обуслоаленная нестабильностью мгновенной скорости вращения рабочей меры, которая может колебаться в пределах одного оборота относительно средней скорости (так называемые качания ротора двигателя), т.е.
. коэффициент К в формуле меняется и это
изменение не учитывается.
Целью изобретения является повышение точности измерений угла поворота.
Это достигается тем, что устройство, содержащее рабочую меру в виде цилиндра с кодовой дорожкой, привод, осветитель, неподвижный и подвижный импульсный датчик, связываемый с объектом, кварцевый генератор, бяок ампямтудного дискриминирсизаняя и регистр, снабжено вторым бло- ком амплитудного дмскриминирования и вторым регистром, двумя дешифраторами и функциональным преобразователем угла поворота, кодовая дорожка рабочей меры
нанесена на основания цилиндра и выпол- нена в виде N меток, каждая из которых представляет собой N чередующихся светлых и темных участков, импульсные датчики выполнены из N фотоприемников, расположенных вдоль радиусов оснований рабочей меры, выходы датчиков подключены к входам блоков амплитудного дискриминирова- ния, выполненных с N входами и выходами, выходы которых подключены к входам соответствующих дешифраторов, выходы кото
рых подключены к управляющим входам соответствующих блоков счетчиков, каждый из которых состоит из N2 счетчиков, счетные входы которых подключены к генератору, а выходы - к входам соответствующих регистров, выходы которых подключены к функциональному преобразователю.
Чередование светлых и темных участков идентифицирует каждую метку, представляя ее код. При вращении рабочей меры каждый из отрезков метки проходит под своим фотоприемником и наводит в нем импульсы, амплитуды которых соответствуют светлым и темным участкам метки. Выходы каждого импульсного датчика соединены с блоками амплитудного диекриминирова- ния, представляющим особой блоки из амплитудных дискриминаторов, на выходе которых появляются напряжения логических 0 и 1 при проходе соответственно светлых и темных участков метки. Дешифратор неподвижного импульсного датчика при проходе под ним метки выдает сигнал Начало счета в зависимости от комбинации нулей и единиц на входе на определенные два из 2 N счетчиков, один из которых подсчитывает количество импульсов кварцевого генератора между приходами на него импульсов, соответствующих прохождению данной метки под неподвижным датчиком. Второй счетчик считает до тех пор, пока на него не поступит импульс конец счета со второго дешифратора, соответствующий прохождению данной метки под подвижным датчиком. Имея число импульсов, соответствующее времени между прохождением конкретной метки подвижного и неподвижного датчиков, делением показаний второго счетчика на показания первого определяют угол поворота вала, например, как
а N2 360/Ni.
Каждой конкретной метке на рабочей мере соответствует своя пара из 2 -N счетчиков. А так как наличие N фотоприемников в датчике позволяет различать на рабочей мере N меток, то и частота обновления информации о измеряемом угле будет равна
F tsr ft).
частота вращения рабочей меры.
На чертеже представлена структурная схема предлагаемого устройства с четырьмя фотоприемниками в каждом импульсном датчике , где 1 - рабочая мера; 2 - радиальные метки; 3 - привод: 4 - осветитель; 5 - корпус; 6 - неподвижный импульсный датчик; 7- подвижный импульсный датчик; 8 - вал; 9 - фотоприемники; 10 - амплитудные дискриминаторы, в совокупности, представляющие собой блоки амплитудного дискриминирована; 11 - дешифратор неподвижного датчика; 12 - дешифратор подвижного датчика; 13,14 - блоки счетчиков; 15,16-коммутаторы; 17-кварцевый генератор; 18, 19 - регистры; 20 - функцио0 нальный преобразователь.
Устройство состоит из рабочей меры 1, выполненной в виде плоского цилиндра из прозрачного материала, на основаниях которого симметрично относительно попереч5 ной плоскости симметрии нанесены по N2 радиальных меток 2, каждая из которых представляет собой чередование светлых и темных участков в радиальном направлении; привода 3, обеспечивающего враще0 ние рабочей меры; осветителя (лампы накаливания или светодиода) 4, расположенного на неподвижном корпусе 5, и освещающего боковую прозрачную поверхность рабочей меры; импульсного датчика 6, рас5 положенного на корпусе; подвижного импульсного датчика 7, связанного с валом 8, угловое положение которого измеряется относительно неподвижной части.
Каждый из датчиков 6, 7 состоит из N
0 фотоприемников 9, расположенных по обоим сторонам рабочей меры радиально на расстояниях от ее оси вращения, соответствующих радиусам чередующихся участков меток; 2 N амплитудных дискриминаторов
5 10, входы которых соединены с соответствующими фотоприемниками, выходы - с двумя дешифраторами 11, 12, выходы дешифратора неподвижного датчика соединены с управляющими входами блока счет0 чиков 13, 14. Выходы дешифратора подвижного датчика соединены с управляющими входами блока счетчиков 14. Каждый из блоков счетчиков 13, 14 состоит из N2 счетчиков, счетные входы которых соедине5 ны с кварцевым генератором 17, выходы блоков счетчиков 13, 14 соединены с входами коммутаторов 15,16, выходы которых соединены со входами регистров 18, 19, выходы регистров соединены с входами
0 функционального преобразователя 20, осуществляющего вычисление угла, и осреднение измерений сделанных за один или несколько оборотов рабочей меры.
Устройство работает следующим обра5 зом. В процессе работы кварцевый генератор 17 постоянно создает сигнал стабильной высокой частоты. При вращении рабочей меры 1 с постоянной угловой скоростью каждая из радиальных меток 2, проходя под неподвижным импульсным датчиком
6, связанным с нулевым направлением, создает на выходах его N фотоприемников 9 импульсы различной амплитуды, импульсы с выходов фотоприемников 9 поступают на входы N амплитудных дискриминаторов 10, которые ставят в соответствие импульсам на входе импульсы, соответствующие логическим 0 или 1 в зависимости от того какой отрезок метки, светлый или темный проходит под фотоприемником, комбинация 0 и 1 на входах блока амплитудного дискримини- рования образует код, соответствующий прохождению конкретной метки.
Этот код поступает на дешифратор 11, который в зависимости от кода запускает одну из пар счетчиков блоков 13,14, работающих с дайной меткой, счетчик блока 13 подсчитывает количество импульсов выдаваемых кварцевым генератором между двумя проходами данной метки под импульсным датчиком 6, счетчик блока 14 подсчитывает количество импульсов до момента прохождения данной метки под подвижным импульсным датчиком 7, который через свой дешифратора 12 выдает в этот момент сигнал Конец счета на счетчик блока 14, значения пары счетчиков блоков 13, 14 после прохода второго импульса на счетчик блока 13 направляются коммутаторами 15,16 в регистры 18, W, значения количества импульсов из регистров 18,19 поступают в функциональный преобразователь 20, осуществляющий вычисление угла поворота, например, по приведенной выше формуле и производящий операцию осреднения по результатам N измерений за один оборот или за несколько оборотов. Измеренные значения угла могут поступать и сразу к пользователю с частотой , точность измерения повышается за счет деления показаний счетчиков блока 14 «а показания счетчиков блока 13, т.е. благодаря постоянному измерению средней угловой скорости рабочей меры за один оборот, для уменьшения погрешностей связанных с нестабильностью скорости вращения рабочей меры внутри одного оборота N2 измеренных за один оборот значений угла подаются в блок осреднения, выполненный, например, в виде счетчика, с помощью этого осуществляется осреднение по N измерениям.
Преимуществом предлагаемого устройства является повышенная точность измерения угла, полученная за счет уменьшения ошибок измерения, связанных с колебанием угловой скорости вращения рабочей меры в пределах одного оборота, путем
осреднения по N получаемым измеренным значениям за один оборот. Точность устройства ограничивается только габаритами необходимыми для размещения
большего количества фотоприемников в каждом датчике и быстродействием элементной базы.
Устройство не требует применения точных технологий для изготовления рабочей
меры.
Предлагаемое устройство позволяет повысить частоту обновления информации об измеряемом угле в Мг раз и, следовательно, уменьшить динамическую ошибку измерения.
Экономический эффект образуется за счет повышения точности измерения, отсутствия точных технологий при производстве датчика, низкой (в десятки раз) его цены, по
сравнению с кодовыми датчиками, например, типа Мхитар, Тозр и подобными другими при той же точности измерения.
25
Формула изобретения
Устройство для измерения угла поворота вала, содержащее рабочую меру в виде цилиндра с кодовой дорожкой, привод, осветитель, неподвижный импульсный датчик,
подвижный импульсный датчик, связываемый с обьектом, кварцевый генератор, блок амплитудного дискриминирования и регистр, отличающееся тем, что, с целью повышения точности измерения, оно снабжено вторым блоком амплитудного дискриминирования и вторым регистром, двумя дешифраторами и функциональным преобразователем угла поворота, кодовая дорожка рабочей меры нанесена на основания
цилиндра и выполнена в виде N2 меток, каждая из которых представляет собой Ы чередующихся светлых и темных участков импульсные датчики выполнены из N фотоприемников, расположенных вдоль радиусов оснований рабочей меры, выходы датчиков подключены к входам блоков амплитудного дискриминирования, выполненных с N входами и выходами, выходы которых подключены к входам соответствующих дешифраторов, выходы которых подключены к управляющим входам соответствующих блоков счетчиков, каждый из которых состоит из N2 счетчиков, счетные входы которых подключены к генератору, а
выходы - к входам соответствующих регистров, выходы которых подключены к функциональному преобразователю.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля частоты вращения турбобура | 1988 |
|
SU1573149A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГОЛ - КОД | 1991 |
|
RU2076456C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Устройство для контроля качества поверхности пластин | 1977 |
|
SU654852A1 |
| Устройство для измерения угла поворота вала | 1979 |
|
SU1023196A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| ИЗМЕРИТЕЛЬ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА В ДИЗЕЛЬ | 2003 |
|
RU2241138C2 |
| Устройство для контроля преобразователей угла поворота вала в код | 1982 |
|
SU1104573A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
Изобретение относится к контрольно- измерительной технике и может быть использовано для высокоточного измерения углов поворота. Целью изобретения является повышение точности измерений, устройство, позволяющее за один оборот рабочей меры производить любое количество измерений и их осреднением получать более точное значение угла. Устройство содержит рабочую меру 1, имеющую радиальные метки 2, приводной двигатель 3, осветитель 4, кварцевый генератор 17, два импульсных датчика 6,7, выходы которых связаны с входами амплитудных дискриминаторов 10. С целью повышения точности измерений угла поворота на рабочей мере 1 нанесены N2 радиальных меток 2, каждая из которых представляет собой п чередующихся светлых и темных участков, импульсные датчики неподвижный 6 и подвижный 7. связанный с объектом, положение которого измеряется, выполнены состоящими из п фотоприемников 9, расположенных по радиусу рабочей меры 1, выходы фотоприемников подключены ко входам амплитудных дискриминаторов 10, выходы дискриминаторов - к входам двух дешифраторов 11,12, выходы которых подключены к управляющим входам двух блоков счетчиков 13,14, каждый из которых состоит из N счетчиков, счетные входы которых подключены к генератору 17, а выходы - к входам двух коммутаторов 15, 16, выходы которых соединены с входами двух регистров 18,19, выходы которых подключены к функциональному преобразователю 20, осуществляющему деление показаний регистров 18, 19 и осреднение по N измерениям. 1 ил. ч ч IS VI VI ГО О- К) Ч)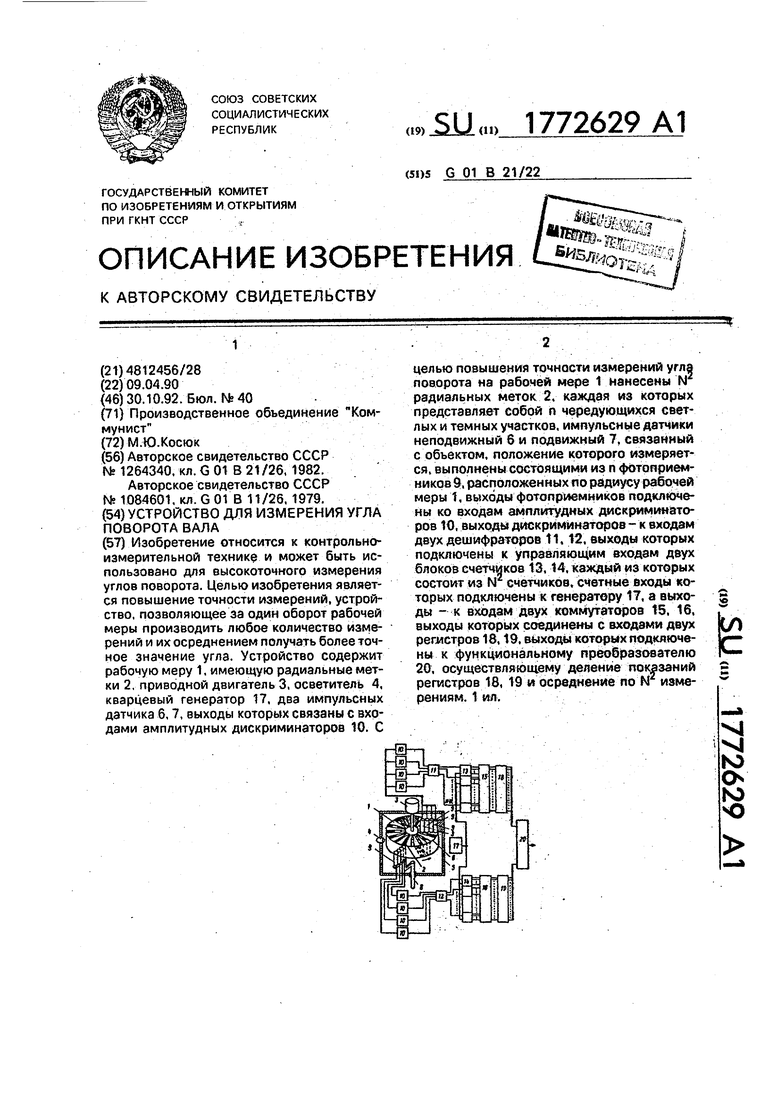
| Устройство для измерения угла поворота вала | 1984 |
|
SU1264340A1 |
| Способ измерения угла поворота вала | 1981 |
|
SU1084601A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
