Изобретение относится к стационарным системам одновременного определения скорости ветра на акватории, волнения поверхности моря и динамического подводного шума в акватории, предварительной обработки информации, передачи информации потребителю, а также может быть использовано в качестве метрологического обеспечения при юстировке (тарировке) измерителей параметров волнения, установленных на подвижных морских объектах и летательных аппаратах.
Известные устройства гидрометеорологических наблюдений за акваторией морского полигона [1, 2, 3, 4, 5, 6], как правило, решают конкретную задачу, заключающуюся в определении одного параметра, характеризующего текущее состояние окружающей среды, путем приборной регистрации сигналов с последующей их трансляцией на диспетчерские станции для последующей обработки полученной информации и передачи этой информации потребителям.
В известном устройстве [1], состоящем по крайней мере из двух электродов, соединенных с высокоомным вольтметром, измеряют градиент потенциала электрических полей, по которому определяют высоту волн. При этом устройства регистрации размещают в прибрежной зоне на глубине более 100 м группами и на удалении от береговой черты на расстояние до 4000 м и соединяют их линиями связи с береговой диспетчерской станцией. Данное устройство в основном используется для определения опасности цунами.
Недостатками данного устройства является то, что для обеспечения достоверных наблюдений на обширной акватории морского полигона необходимо размещение значительного количества устройств регистрации, соединенных линиями связи с диспетчерской станцией, а также ограниченный диапазон измеряемых параметров.
В известном устройстве [2], представляющем собой устройство для измерения параметров волнения с летательных аппаратов, включающее блоки излучения, приема, усиления, формирования и преобразования радиосигналов, отраженных от морской поверхности, определение, по мощности отраженных сигналов в зависимости от высоты полета на основании функциональных зависимостей, высоты морских волн.
Для практической реализации данного устройства, для получения достоверной информации необходимо правильно выбрать и поддерживать на заданном уровне соотношение величин, характеризующих высоту полета летательного аппарата и длительность зондирующего короткого импульса, что возможно обеспечить только при благоприятных погодных условиях, что существенно ограничивает использование данного устройства для длительных и непрерывных наблюдений за акваторией морского полигона.
Известные устройства [3] представляют собой донные станции, устанавливаемые с носителей на дно моря и снабженные регистрирующей аппаратурой геофонного и гидрофонного типа для регистрации сигналов в частотном диапазоне от 3-5 до 200-300 Гц с трансляцией их на диспетчерскую станцию после всплытия по истечении трех недель, для последующей обработки и определения по функциональным зависимостям параметров, характеризующих окружающую среду в месте установки.
Недостатками данных устройств являются низкая автономность (не более 20-30 суток) и оперативность получения информации (только после всплытия), что практически исключает возможность их использования для длительных наблюдений за акваторией морского полигона.
Известные устройства [4, 5] представляют собой дрейфующие станции (буи), снабженные регистрирующей аппаратурой для измерения сигналов, характеризующих температуру и давление окружающей среды, соленость и электропроводность морской воды, по значениям которых на основании функциональных зависимостей определяют гидрометеорологические параметры на акватории морского полигона. Данные станции снабжены спутниковой аппаратурой, что обеспечивает не только оперативную трансляцию на диспетчерские станции измеренной информации, но и позволяет дополнительно определять такие параметры как текущие координаты буя, составляющие вектора скорости буя, а также восстанавливать профиль волнения, путем осуществления совместной обработки текущей высоты и вертикальной скорости буя, поступающих от спутникового навигационного приемника с секундным темпом обновления на основании функциональных зависимостей с определением среднего уровня моря.
Однако при этом для получения достоверных параметров необходимо, по крайней мере, выполнение двух условий, обусловленных нахождением четырех спутников в границах зоны видимости полигона при удовлетворительном геометрическом факторе и необходимостью восстановления профиля волнения в следящем по частоте фильтре второго порядка астатизма с коэффициентом сглаживания α=10-3 и собственной частотой фильтра ω0=2π/6. В результате такой фильтрации получают сильно сглаженную первичную волну, так как вторичные волны через такой фильтр не проходят, и далее по функциональным зависимостям подсчитывают число периодов волны на заданном интервале при времени осреднения измеренной информации не менее двух часов.
Известные устройства за наблюдением морской поверхности, приведенные в [6], представляют собой когерентные РЛС, установленные на берегу, альтиметры, установленные на спутниках, радиодопплеровские измерители параметров волнения, установленные на летательных аппаратах, а также волнографы различных типов и т.п. обеспечивают решение ограниченного числа задач как по числу измеряемых сигналов, так и по объему определяемых параметров с необходимой точностью и достоверностью, что не позволяет их рассматривать в полной мере в качестве средств объективного контроля при гидрометеорологических наблюдениях за акваторий морского полигона, а тем более в качестве средств метрологического обеспечения.
Наиболее полный набор параметров, характеризующий состояние акватории морского полигона, обеспечивает устройство гидрометеорологических наблюдений за акваторией морского полигона [7], которое содержит последовательно соединенные гидрофон, предварительный усилитель, линию связи, широкополосный усилитель, анализатор спектра, выход которого соединен с первым входом индикатора, блок выделения участка спектра, блок классификации шума моря, блок определения скорости ветра и блок определения волнения моря, при этом вход блока выделения участка спектра соединен с выходом анализатора спектра, а выход - со входами блока классификации шума моря и блока определения скорости ветра, первый выход которого соединен со входом блока определения волнения моря, а первый выход блока классификации шума моря, второй выход блока определения скорости ветра и выход блока определения волнения моря соединены со вторым, третьим и четвертым входами индикатора, блок синхронизации и управления, управляемый вход которого соединен со вторым выходом блока классификации шума моря, первый синхровыход соединен с синхровходами блока анализатора спектра и блока выделения участка спектра, а второй, третий и четвертый синхровыходы соединены с сихровходами блока классификации шума моря, блока определения скорости ветра и блока определения волнения соответственно, что позволяет использовать его в качестве стационарной системы одновременного определения скорости ветра на акватории, волнения поверхности моря и динамического подводного шума в акватории на основании измеренных сигналов и функциональных зависимостей, предварительной обработки информации и передачи информации потребителю или на диспетчерскую станцию.
Однако вывод о том, что "шум судоходства резко спадает с частотой и в выбранном диапазоне на результаты измерений влияет слабо, хотя на частотах 5-7 кГц его влияние наблюдается" не в полной мере соответствует действительности.
Например, известно (см. например: 1. Сухаревский Ю.М. Статистика основных акустических параметров глубоководных районов океана и вероятная дальность действия гидроакустических систем. // Акустический журнал, 1995, том 41, №5, с.848-864. 2. Справочник по гидроакустике. / Евтютов А.П., Колесников А.Е., Корепин Е.А. и др. - 2-е изд. - Л.: Судостроение, 1988, - 552 с), что интенсивность спектральных характеристик обобщенных шумов убывает с ростом частоты. Максимальные значения шумов морской среды регистрируются в инфразвуковом диапазоне (f≈1-10 Гц) и могут достигать 100-120 дБ. В мелководных районах шумы отдельных компонентов шума морской среды обычно на 10-20 дБ выше, чем в глубоководных. В диапазоне низких звуковых частот (от 10 до 300 Гц) превалируют относительно когерентные шумы судоходства (см. например: Ильичев В.И. Исследование поля акустического шума океана векторно-фазовыми методами. // Акустика океанской среды. / Под ред. Л.М.Бреховских. - М.: Наука, 1989. - с.140-152.), интенсивность которых может достигать 70 дБ и более, при этом участок спектра с максимальными сигналами может сдвигаться с увеличением глубины (от частот f=50-100 Гц для мелководных районов и до f=20-80 Гц - для глубоководных). Для более высоких частот суммарная интенсивность шума морской среды определяется в основном скоростью ветра. В диапазоне 1-10 кГц уровень шума морской среды может значительно увеличиться (до 55 дБ) за счет шумов интенсивных дождей (см. например: Акустика в океане. / Под ред. Л.М.Бреховских, И.Б.Андреевой. - М.: Наука. 1992. - 229 с).
В целом характеристики шума морской среды сохраняют стационарность для реализаций продолжительностью от 10…20 с до 3…5 минут (см. например: Экспериментальные оценки стационарности подводных шумов океана. / Аредов А.А., Дронов Г.М., Охрименко Н.Н., Фурдуев А.В. // Акустический журнал, 1994, том 40, №3, с.357-361).
Анализ вертикальной изменчивости шумов морской среды (см. например: Курьянов Б.М., Моисеев А.А. Исследование глубинной зависимости низкочастотных шумов океана с помощью буя управляемой плавучести. // Акустический журнал, 1994, том 40, №3, с.380-384) показывает, что для частот менее 100-200 Гц наблюдается тенденция повышения интенсивности на 3-5 дБ вблизи оси подводного звукового канала по сравнению с данными измерений вблизи дна. На более высоких частотах эта зависимость может изменяться на обратную. В частности, отмечено (см. например: Деревянкина Е.И., Кацнельсон Б.Г., Любченко А.Ю. Вертикальная структура интенсивности низкочастотного шумового поля мелкого моря. // Акустический журнал, 1994, том 40, №3, с.380-384), что при регистрации сигналов на частотах от 200 до 600 Гц в мелком море (глубины менее 120 м) вблизи оси подводного звукового канала наблюдаются минимальные значения интенсивности шума морской среды. Суммарные шумы морской среды обладают анизотропией как в вертикальной, так и в горизонтальной плоскостях. При измерениях направленными гидроакустическими датчиками вариаций шумов (см. например: Шмарфельд Б., Раух Д. Низкочастотные окружающие шумы и шумы, производимые судном в мелкой воде. // Акустика дна океана. / Под ред. У.Купермана и Ф.Енсена, пер. с англ., М.: Мир, 1984. - 460 с.) в азимутальной плоскости отмечалось повышение уровней интенсивности акустического сигнала на 4-5 дБ по направлениям на удаленные (1000 км) шторма и районы интенсивного судоходства. Для полей, близких к точке наблюдений (до 100 км) гидродинамических источников, наибольшая интенсивность наблюдалась с направлений, перпендикулярных к распространению ветровых волн.
Отсутствие в алгоритмах обработки гидрометеорологической обстановки посредством ненаправленного гидрофона, размещенного в толще морской среды на глубине 100-150 м, учета геометрического фактора не позволяет определить такой важный параметр как угол прихода морских волн. Размещение устройства регистрации сигналов (ненаправленного гидрофона) на глубине 100 м для условий мелкого моря, для обычных условий акустической волны из-за влияния придонных течений может распространяться под любыми углами скольжения, и их прямой "захват" маловероятен.
Кроме того, при использовании в алгоритмах обработки энергетического шума моря дискретного преобразования Фурье, исследуемые процессы представляют собой суперпозицию гармонических колебаний в виде ряда или интервала Фурье, что, например, для анализа в гидрометеорологических исследованиях может вносить дополнительные погрешности, так как сумма двух периодических колебаний может быть непериодической функцией, например, при сложении синусоидальных колебаний с несоизмеримыми частотами, когда сложение ω и 2ω дает сложное непериодическое колебание.
Задачей предлагаемого технического решения является расширение функциональных возможностей устройства с одновременным повышением достоверности при гидрометеорологических наблюдениях за акваторией морского полигона.
Поставленная задача решается за счет того, что в устройство гидрометеорологических наблюдений за акваторией морского полигона, содержащее последовательно соединенные гидрофон, предварительный усилитель, линию связи, широкополосный усилитель, анализатор спектра, блок выделения участка спектра, блок классификации шума моря, блок определения скорости ветра и блок определения волнения моря, при этом вход блока выделения участка спектра соединен с выходом анализатора спектра, а выход - со входами блока классификации шума моря и блока определения скорости ветра, блок синхронизации и управления, управляемый вход которого соединен со вторым выходом блока классификации шума моря, первый синхровыход соединен с синхровходами блока анализатора спектра и блока выделения участка спектра, а второй, третий и четвертый синхровыходы соединены с синхровходами блока классификации шума моря, блока определения скорости ветра и блока определения волнения соответственно, дополнительно введены еще четыре гидрофона, соединенные с предварительным усилителем, навигационно-измерительный модуль, соединенный своими входами с выходами блока определения волнения, блока синхронизации и управления, блока определения скорости ветра, блока определения волнения моря, анализатором спектра, а устройство выполнено в виде единой монолитной конструкции, в которой размещены измерительные блоки, при этом заглубленная часть корпуса устройства снабжена полиуретановым ступенчатым каркасом, выполненным в форме усеченной пирамиды, в нижней части которой размещены гидрофоны, четыре из которых ориентированы по частям света, соответственно, и один гидрофон ориентирован по вертикали в сторону дна.
Сущность изобретения поясняется чертежами (фиг.1, 2). Фиг.1. Блок-схема устройства включает гидрофоны 1, 2, 3, 4, 5, предварительный усилитель 6, линию связи 7, широкополосный усилитель 8, анализатор спектра 9, блок выделения участка спектра 10, блок классификации шума моря 11, блок определения скорости ветра 12, блок определения волнения моря 13, блок синхронизации и управления 14, спутниковый навигационно-измерительный модуль 15.
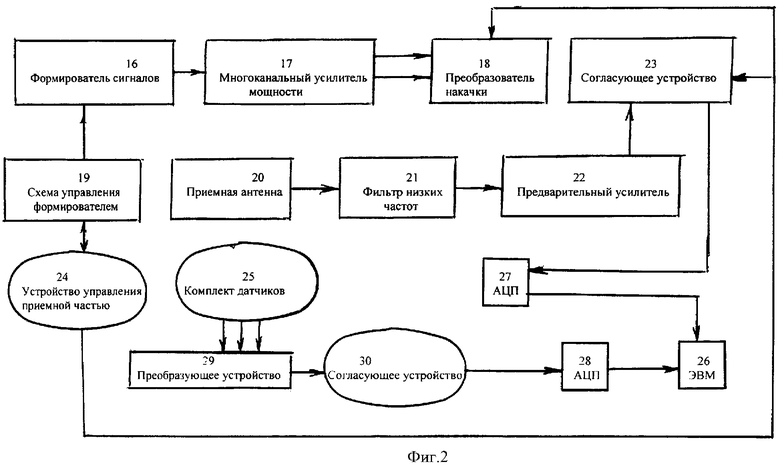
Фиг.2. Гидрофон, который включает формирователь сигналов 16, многоканальный усилитель мощности 17, преобразователь накачки 18, схему управления формирователем 19, приемную антенну 20, фильтр низких частот 21, предварительный усилитель 22, согласующее устройство 23, устройство управления приемной частью 24, комплект датчиков 25 с преобразователем 29 сигналов с датчиков в электрические сигналы и согласующим устройством 30, вычислитель, состоящий из ЭВМ 26 и двух аналого-цифровых преобразователей 27 и 28.
Устройство работает следующим образом. Электрические сигналы накачки с частотами накачки и заданным видом модуляции генерируются в формирователе сигналов 16 и через усилители мощности 17 подаются на преобразователь накачки 18, который излучает акустические колебания с частотами накачки. При распространении волн накачки в водной среде образуется параметрическая антенна волн разностной частоты с необходимыми характеристиками. Режимами работы формирователя (изменение длительности зондирующего импульса, изменение частоты посылки, изменение разностной частоты и закона ее модуляции) управляет схема управления формирователем 19. Рассеянные сигналы в результате взаимодействия волн разностной частоты и гидрофизических слоев принимаются приемной антенной 20, которая необходима, так как излучающая параметрическая антенна необратима, а преобразователь накачки на частоте разностной волны имеет низкую чувствительность из-за работы вдалеке от резонанса. Электрические сигналы через фильтр низких частот 21, в котором подавляются волны накачки, поступают на предварительный усилитель 22 и затем на согласующее устройство 23, которое предназначено для согласования входных и выходных импедансов усилителя и аналого-цифрового преобразователя спутникового измерительного модуля 15. Коэффициентами усиления приемной части, полосой пропускания в зависимости от типа сигнала и длительности импульса управляет устройство управления приемной частью 24. Комплект датчиков 25 содержит датчики солености, температуры и давления, расположенных у преобразователя накачки и предназначенных для измерения параметров водной среды в зоне взаимодействия волн накачки, которые необходимы в дальнейшем для вычисления изменения сигнала волны разностной частоты вдоль трассы их распространения. Вычисления производятся по причинам, заключающимся в том, что генерация сигналов волн разностной частоты происходит в пространстве и их уровни не могут быть получены путем приведения к нормируемому уровню на определенном расстоянии, как это делается в традиционных излучающих антеннах, а также потому, что уровни зависят от значений параметров среды в зоне взаимодействия волн накачки. Сигналы с датчиков преобразуются в электрические сигналы в преобразователе сигналов с датчиков в электрические сигналы и через согласующее устройство поступают на аналого-цифровой преобразователь 27 вычислителя. ЭВМ 26 управляет аналого-цифровыми преобразователями 27, 28 и производит все вычисления для определения профилей температуры, солености, акустического сопротивления, скорости звука и плотности среды с неоднородностями.
Определение параметров слоев гидрофизических неоднородностей производится в комплексе путем их вычислений в следующей последовательности.
Сигналы с приемной антенны и комплекта датчиков через соответствующие аналого-цифровые преобразователи поступают в ЭВМ, где они подвергаются обработке в части предварительной обработки, при которой вычисляются амплитуды отраженного сигнала и зондирующего сигнала в месте установки приемной антенны, согласованной обработки принятых сигналов, для точного определения положения рассеянных сигналов и определения различных моментов сигналов, анализа взаимокорреляционных связей сигналов, расчета коэффициентов отражений слоев, формирования исходных данных гидрофизических характеристик в месте установки преобразователя накачки, расчета характеристик зондирующего сигнала по трассе его распространения, что необходимо для вычисления истинного значения амплитуды и фазы волны разностной частоты, падающей на рассеватель, калибровки зондирующего сигнала, измеренного в месте установки преобразователя накачки, расчета акустического импеданса слоев, расчета глубины расположения слоя, толщины слоя и скорости звука в нем, расчета плотности слоев, формирования профилей температуры, солености, акустического сопротивления, плотности и скорости звука, расчета температуры и солености слоев.
Использование такой обработки позволяет, зная гидрофизические параметры слоя, расположенного у преобразователя накачки, рассчитывать последовательно слой за слоем параметры остальных слоев.
Гидрофоны 1, 2, 3, 4, 5 имеют следующие характеристики: диапазон рабочих частот 15-50 кГц, частота волн накачки 125,5-148 кГц и 153-175,5 кГц. Тип излучаемого сигнала - прямоугольный радиоимпульс, линейно-частотно-модулированный импульсный сигнал, сигнал с перестраиваемой частотой от импульса к импульсу, длительность зондирующего импульса 1, 2, 4, 8, 16 и 32 мс, частота следования импульсов не более 2 Гц.
Блок определения волнения моря 13 представляет собой микропроцессорное устройство, состоящее из аналого-цифрового преобразователя, контроллера, оперативно запоминающего устройства, программируемого запоминающего устройства, субоптимального фильтра.
В основу измерения профиля волнения положен интегральный метод, основанный на косвенном определении профиля волнения исходя лишь из данных о вертикальной скорости перемещения устройства на водной поверхности в соответствии с зависимостью
 , где
, где
S - перемещение устройства за время Т;
V(t) - скорость перемещения устройства.
Перемещение устройства в конкретный момент определяют по формуле
 где
где
S(t) - положение устройства в текущий момент;
S0 - положение устройства в предыдущий момент;
а - ускорение.
Данный метод позволяет полностью исключить из обработки грубые измерения высоты и получить информацию о движении дрифтера лишь по высокоточным данным о скорости.
Для исключения сильно зашумленных кодовых измерений высоты фазовыми скоростями перемещений дрифтера применен субоптимальный фильтр. Текущая оценка Zi с помощью любого линейного фильтра в виде суммы прогноза Zi и фильтрованной оценки текущего измерения:
 ,
,
где  - текущее значение измерения;
- текущее значение измерения;
α - коэффициент передачи, определяет постоянную времени фильтра α=1τс;

Поскольку оценка Z формируется в спутниковых приемниках из высокоточных фазовых измерений, воспроизводящих динамику дрифтера с миллиметровой (субмиллиметровой) точностью, формула (2) определяет самый высокоточный прогноз для любого линейного фильтра спутниковых измерений. Подставляя (2) в (1), получим α - БИХ фильтр, оптимальным образом сглаживающий кодовые измерения фазовыми:
 .
.
Результатом обработки являются оптимальным образом сглаженные кодовые измерения, однако, данный фильтр не может убрать постоянный низкочастотный тренд ошибок высотных измерений, в силу достаточно большой величины α. Для исключения этого тренда достаточно применить к уже сглаженной оценке этот же самый фильтр повторно, но с большим коэффициентом α (глубокое сглаживание). Анализ низкочастотного шума позволяет сделать вывод, что компромиссным вариантом будет выбор α=0,15 1/с. Далее выполняется центрирование (вычитание из оценки тренда). После исключения тренда производится вычисление дисперсии полученной центрированной оценки:
где Hi - значения центрированного тренда,
N - количество значений в выборке.
Амплитуда колебаний выводится через дисперсию  , где А - искомая амплитуда, σ - средняя квадратическая ошибка.
, где А - искомая амплитуда, σ - средняя квадратическая ошибка.
Далее производится вычисление периода волн, методом подсчета числа пересечений волновым профилем нулевой линии.
При этом посредством спутниковой навигационной системы типа СН-3800 определяется вектор скорости течения водной поверхности по изменению горизонтального перемещения дрифтера.
Высота волны hi определяется как hi=r1+r2, где r1 - высота предыдущего полупериода, r2 - высота последующего полупериода. При наличии нескольких одинаковых максимальных амплитуд за полупериод для расчета высоты волны используется любая из них. После определения значений высот волн и их количества в реализации рассчитывается среднее значение высоты волны
 , где m - число волн за время измерения 20 минут.
, где m - число волн за время измерения 20 минут.
Для определения высоты волны 3% обеспеченности из массива высот волн отбирается 20 максимальных волн, которые располагаются по мере убывания с присвоением порядкового индекса от 1 до 20, начиная с максимальной амплитуды. Затем вычисляется индекс 3% обеспеченности К3%=3m/100. Высота волны, соответствующая этому индексу, будет трехпроцентной. Сбор и обработка измеренной информации осуществляются в спутниковом измерительном модуле 15, состоящем из контроллера, включающим интерфейсы RS232 - до 8 каналов, ЕРР/ЕСР 1 канал, параллельную 8-ми разрядную шину 12 каналов, линию управления питанием внешних устройств 5/12 В, до 0,5 А - до 8 линий, SPI до 3 каналов, 12S - до 2 каналов, CAN-канал, USB-1 канал, ультразвуковой канал 1, оптоволоконный модем 1, радиомодем 1, FLASH-память до 4 Гбайт, часы реального времени, входные фильтры аналоговых каналов.
Скорость перемещения дрифтера V(t), определяемая посредством спутниковой навигационной системы, есть ничто иное, как скорость дрейфового течения Vд перемещения дрифтера, которое определяется как Vд=(0,0127/√sinφ)W, где φ - широта места, W - скорость ветра (см. Шулейкин В.В. Краткий курс физики моря. Л.: Гидрометеорологическое издательство, 1959, с.40). Откуда скорость ветра может быть определена как W=Vд/0,0127√sinφ, что осуществляется посредством блока определения скорости ветра 12.
Аналогами блоков 6, 7, 8, 9, 10, 11 и 14 являются аналогичные блоки прототипа. Устройство в целом выполнено в виде единой монолитной конструкции, в которой размещены измерительные блоки. В верхней части имеется крышка, служащая для установки измерительных блоков. На крышке установлена антенна спутниковой навигационной антенны. Заглубленная часть корпуса снабжена полиуретановым ступенчатым каркасом, выполненным в виде усеченной пирамиды, в нижней части которой размещены гидрофоны, четыре из которых ориентированы по частям света, соответственно, и еще один гидрофон ориентирован по вертикали в сторону дна. Ступенчатый каркас, расширяющийся книзу с установленными на нем гидрофонами, выполняет функцию стабилизирующего устройства и служит для гашения колебаний устройства в целом.
Технический результат, заключающийся в повышении достоверности при гидрометеорологических наблюдениях за акваторией морского полигона и в расширении функциональных возможностей аналогичных устройств, достигается за счет того, что дополнительно введены еще четыре гидрофона, соединенные с предварительным усилителем, навигационно-измерительный модуль, соединенный своими входами с выходами блока определения волнения, блока синхронизации и управления, блока определения скорости ветра, блока определения волнения моря, анализатором спектра, а устройство выполнено в виде единой монолитной конструкции, в которой размещены измерительные блоки, при этом заглубленная часть корпуса устройства снабжена полиуретановым ступенчатым каркасом, выполненным в форме усеченной пирамиды, в нижней части которой размещены гидрофоны, четыре из которых ориентированы по частям света, соответственно, и один гидрофон ориентирован по вертикали в сторону дна.
Промышленная реализация предлагаемого технического решения технической сложности не представляет, так как используются серийно освоенные изделия и апробированные аппаратные средства.
Источники информации
1. Патент РФ №2066466.
2. Патент РФ №1240169.
3. Современные донные станции для сейсморазведки и сейсмологического мониторинга. / Зубко Ю.Н., Левченко Д.Г. Леденев В.В., Парамонов А.А. // Научное приборостроение, 2003, том 13, №4, с.70-82.
4. High-precision water-level monitoring / Massatoshi Harigae, Isao Yamaguchi, Tokio Kasai, Hirotaka Igava, Hiroto Nakanishi, Takahiro Murayama, Yasunori Iwanaka, Hirotaka Suko // GPS World, April 2005.
5. Patent US №6847362 B2, 25 января 2005.
6. Загородников А.А. Радиолокационная съемка морской поверхности с летательных аппаратов. Л., Судостроение, 1978, 376 с.
7. Патент РФ №2079168 С1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376612C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2300781C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНЫХ ДАННЫХ О СОСТОЯНИИ ОКЕАНА | 2004 |
|
RU2282217C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |
| СПОСОБ ЭКСТРЕННОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2008 |
|
RU2382270C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМОЖНОСТИ НАСТУПЛЕНИЯ КАТАСТРОФИЧЕСКИХ ЯВЛЕНИЙ | 2007 |
|
RU2346300C1 |
Изобретение относится к стационарным системам одновременного определения скорости ветра на акватории, волнения поверхности моря и динамического подводного шума в акватории, предварительной обработки информации, передачи информации потребителю, а также может быть использовано в качестве метрологического обеспечения при юстировке (тарировке) измерителей параметров волнения, установленных на подвижных морских объектах и летательных аппаратах. Техническим результатом изобретения является расширение функциональных возможностей устройства и повышение достоверности при гидрометеорологических наблюдениях за акваторией морского полигона. Устройство включает гидрофоны 1, 2, 3, 4, 5, предварительный усилитель 6, линию связи 7, широкополосный усилитель 8, анализатор спектра 9, блок выделения участка спектра 10, блок классификации шума моря 11, блок определения скорости ветра 12, блок определения волнения моря 13, блок синхронизации и управления 14, спутниковый навигационно-измерительный модуль 15. 2 ил.
Устройство гидрометеорологических наблюдений за акваторией морского полигона, содержащее последовательно соединенные гидрофон, предварительный усилитель, линию связи, широкополосный усилитель, анализатор спектра, блок выделения участка спектра, блок классификации шума моря, а также содержащее блок определения скорости ветра и блок определения волнения моря, блок синхронизации и управления, управляемый вход которого соединен со вторым выходом блока классификации шума моря, первый синхровыход соединен с синхровходами блока анализатора спектра и блока выделения участка спектра, а второй, третий и четвертый синхровыходы соединены с синхровходами блока классификации шума моря, блока определения скорости ветра и блока определения волнения моря соответственно, отличающееся тем, что дополнительно введены еще четыре гидрофона, соединенные с предварительным усилителем, навигационно-измерительный модуль, соединенный своими входами с выходами блока синхронизации и управления, блока определения скорости ветра, блока определения волнения моря, анализатором спектра.
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2300781C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 1994 |
|
RU2079168C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ МОРЯ | 1988 |
|
SU1839887A1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| JP 3111778 A, 13.05.1991. | |||

