Изобретение относится к способам определения гидрометеорологических параметров, а именно к комплексному определению таких параметров как скорость ветра на акватории, волнение поверхности моря и динамический подводный шум на акватории с предварительной обработкой информации, передачи информации потребителю для освещения гидрометеорологической обстановки при проведении работ на морских акваториях.
Известные способы и устройства гидрометеорологических наблюдений за акваторией морского полигона [1, 2, 3, 4, 5, 6], как правило, решают конкретную задачу, заключающуюся в определении одного параметра, характеризующего текущее состояние окружающей среды, путем приборной регистрации сигналов с последующей их трансляцией на диспетчерские станции для последующей обработки полученной информации и передачи этой информации потребителям.
В известном устройстве [1], состоящим по крайней мере из двух электродов, соединенных с высокоомным вольтметром измеряют градиент потенциала электрических полей, по которому определяют высоту волн. При этом устройства регистрации размещают в прибрежной зоне на глубине более 100 м группами и на удалении от береговой черты на расстояние до 4000 м и соединяют их линиями связи с береговой диспетчерской станцией. Данное устройство в основном используется для определения опасности цунами.
Недостатками данного устройства является то, что для обеспечения достоверных наблюдений на обширной акватории морского полигона необходимо размещение значительного количества устройств регистрации, соединенных линиями связи с диспетчерской станцией, а также ограниченный диапазон измеряемых параметров.
В известном устройстве [2], представляющим собой устройство для измерения параметров волнения с летательных аппаратов, включающее блоки излучения, приема, усиления, формирования и преобразования радиосигналов, отраженных от морской поверхности, определение, по мощности отраженных сигналов в зависимости от высоты полета на основании функциональных зависимостей, высоты морских волн.
Для практической реализации данного устройства, для получения достоверной информации необходимо правильно выбрать и поддерживать на заданном уровне соотношение величин, характеризующих высоту полета летательного аппарата и длительность зондирующего короткого импульса, что возможно обеспечить только при благоприятных погодных условиях, что существенно ограничивает использование данного устройства для длительных и непрерывных наблюдений за акваторией морского полигона.
Известные устройства [3] представляют собой донные станции, устанавливаемые с носителей на дно моря и снабженные регистрирующей аппаратурой геофонного и гидрофонного типа для регистрации сигналов в частотном диапазоне от 3-5 до 200-300 Гц с трансляцией их на диспетчерскую станцию после всплытия по истечению трех недель, для последующей обработки и определения по функциональным зависимостям параметров, характеризующих окружающую среду в месте установки устройств.
При этом автоматически поддерживается постоянной длина волны излучаемых колебаний. Необходимость учета скорости звука существенно увеличивает трудоемкость наблюдений, а при частой и резкой смене гидрометеорологических условий в районе полигона может вносить и дополнительную погрешность в окончательные результаты наблюдений.
Все это требует непрерывного измерения гидрологических параметров и более достоверных способов обработки измеряемых сигналов, исключающих из процесса обработки зарегистрированных сигналов косвенные методы определения гидрометеорологических параметров. Повышение информативности возможно путем выполнения гидрологических разрезов до слоя скачка, что также позволит получить такую важную характеристику как характеристику распределения скорости звука по всей глубине от поверхности до дна, что требует непрерывного измерения гидрометеорологических характеристик и более совершенных способов обработки измеряемых сигналов и получения избыточности измеряемых параметров.
Задачей предлагаемого технического решения является расширение функциональных возможностей устройства с одновременным повышением достоверности при гидрометеорологических наблюдениях за акваторией морского полигона.
Поставленная задача решается за счет того, что в способе гидрометеорологических наблюдений за акваторией морского полигона, включающем размещение на полигоне средств измерения гидрометеорологических параметров определения скорости ветра, волнения моря, классификацию шума моря по выделенному участку спектра, измерение гидроакустических сигналов, обработку измеренных сигналов, формирование профилей температуры, солености, акустического сопротивления, распределение скорости звука по глубине и плотности среды с неоднородностями - распределение скорости звука по глубине определяют посредством лазерно-гидроакустического зондирования с выполнением гидрологических разрезов до слоя скачка в периодическом режиме, а устройство для осуществления способа, включающее параметрический локатор, измеритель параметров среды и вычислительный модуль, в котором параметрический локатор состоит из двух перестраиваемых генераторов, двух импульсных модуляторов, импульсного генератора, двух усилителей мощности, преобразователя накачки, приемной антенны, приемного усилителя, регистрирующего устройства в которое дополнительно введено устройство лазерного зондирования в виде твердотельного лазера, включающего активный элемент, помещенный в резонатор, приемная антенна параметрического локатора выполнена в форме цилиндра с тангенциальной поляризацией, внутренняя поверхность цилиндра выполнена экранированной, цилиндр помещен в отражатель с наклонной образующей к основанию под углом 45 градусов, приемная антенна состоит из n отдельных элементов, расположенных на равном расстоянии друг от друга, при этом на соседние элементы подается напряжение, сдвинутое по фазе на постоянный угол.
Сущность изобретения поясняется чертежами (фиг.1-6).
Фиг.1. Блок-схема устройства включает параметрический локатор 1, измеритель параметров среды 2, вычислительный модуль 3, устройство лазерного зондирования 4.
Фиг.2. Параметрический локатор 1 включает два генератора 5 и 6, импульсный генератор 7, импульсные модуляторы 8 и 9, регистрирующее устройство 10, усилители мощности 11 и 12, приемный усилитель 13, преобразователь накачки 14, приемную антенну 15.
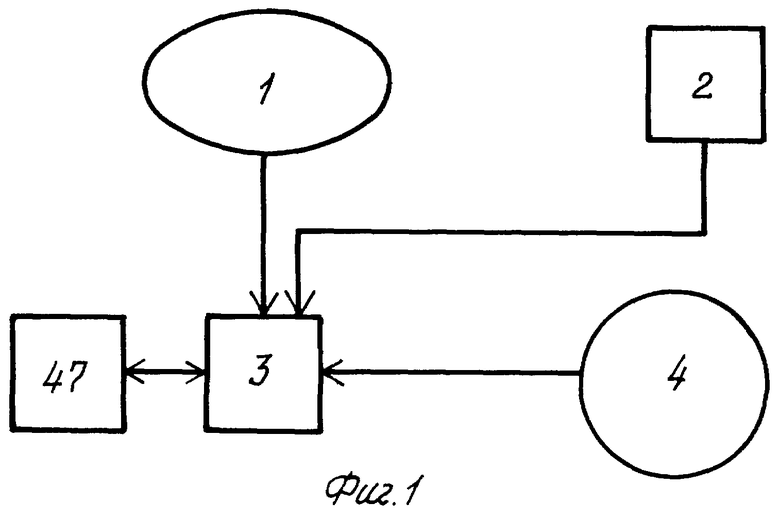
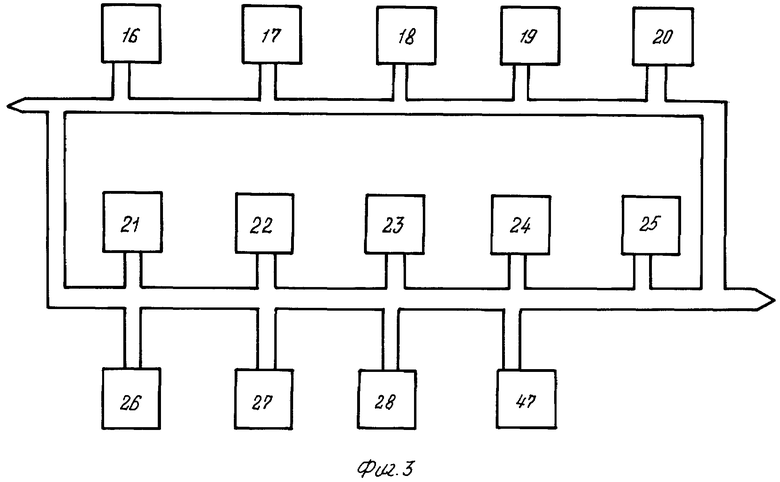
Фиг.3. Измеритель параметров среды 2 включает датчики определения температуры воздуха 16, атмосферного давления и температуры воды 17, гидродинамического давления 18, электропроводности 19, солености 20, блок определения средней скорости звука в воде 21, блок сбора, обработки и картирования акватории морского полигона 22, анализатор спектра 23, блок выделения участка спектра 24, блок классификации шума моря 25, блок определения скорости ветра 26, блок определения волнения моря 27, блок синхронизации и управления 27, спутниковый навигационно-измерительный модуль 28.
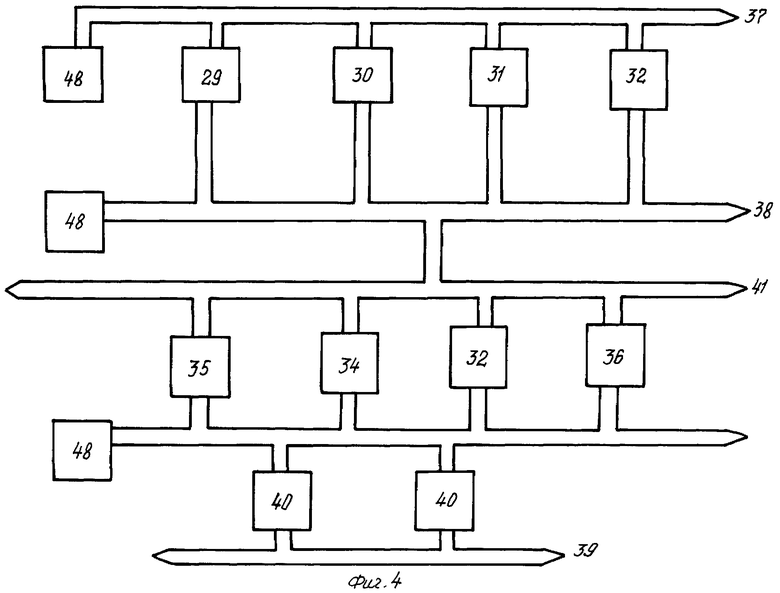
Фиг.4. Вычислительный модуль 3 состоит из ПЗУ микрокоманд 29, ПЗУ управления выбором адреса 30, БИС микропрограммного управления 31, двух микропроцессоров 32 и 33, ПЗУ 34, ОЗУ 35, схемы формирования переносов 36, трех буферных регистров, пяти магистралей - магистрали адреса 37, магистрали микрокоманд 38, магистрали D 37, магистрали М 38, магистрали L 39 и двух аналого-цифровых преобразователей 40 и 41.
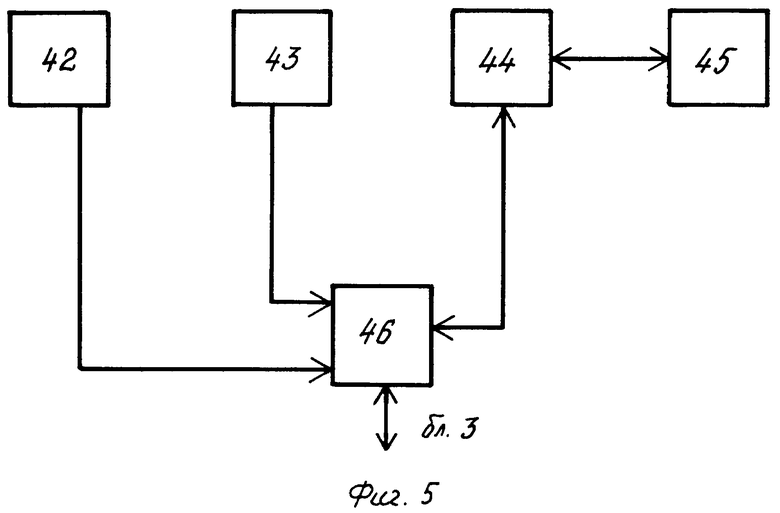
Фиг.5. Спутниковый навигационно-измерительный модуль 28 состоит из магнитного компаса 42, инерциально-измерительной схемы 43, приемоиндикатора 44, антенно-фидерного устройства 45, контроллера 46, включающего интерфейсы RS232 - до 8 каналов, ЕРР/ЕСР - 1 канал, параллельную 8-ми разрядную шину - 12 каналов, линию управления питанием внешних устройств 5/12 В, до 0,5 А - до 8 линий, SPI до 3 каналов, 12S - до 2 каналов, CAN-канал, USB-1 канал, ультразвуковой канал-1, оптоволоконный модем-1, радиомодем-1, FLASH-память до 4 Гбайт, часы реального времени, входные фильтры аналоговых каналов.
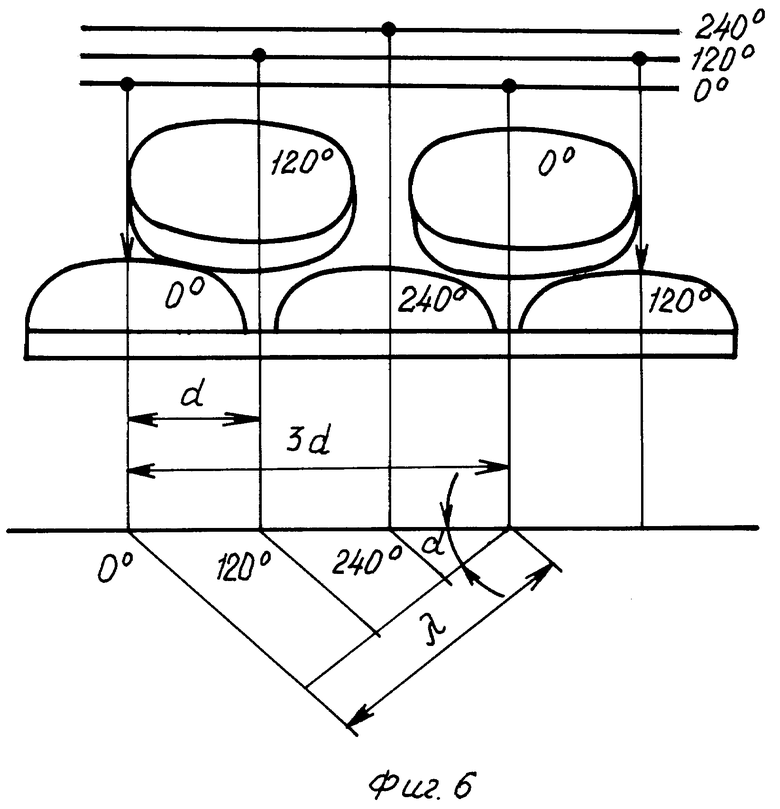
Фиг.6. Размещение преобразователей излучающей антенны.
Параметрический локатор 1 работает на принципе нелинейного взаимодействия акустических волн. Формирование исходных электрических сигналов осуществляется по двухканальной схеме. Сигналы с генераторов 5, 6 поступают на импульсные модуляторы 8, 9, которые управляются импульсным генератором 7. Затем радиоимпульсы усиливаются усилителями мощности 11, 12 и излучаются в воду преобразователем накачки 14. Антенна 15, приемный усилитель 13 и регистрирующее устройство 10 образуют приемный тракт. Приемная антенна 15 параметрического локатора 1 выполнена в форме цилиндра с тангенциальной поляризацией, а внутренняя поверхность цилиндра выполнена экранированной. Цилиндр помещен в отражатель с наклонной образующей к основанию под углом 45 градусов.
Площадь антенны 15 сформирована из линейно расположенных на равном расстоянии друг от друга отдельных элементов. Соседние элементы антенны питаются напряжением сдвинутым по фазе на постоянный угол Δφ. Главные максимумы диаграммы направленности формируются в направлении, для которых обеспечивается синфазное сложение колебаний всех элементов антенны. Как известно, угол α между плоскостью антенны и направлением главного максимума определяется в этом случае выражением α=arc cos Δφλ0/2dπ (1), где Δφ - сдвиг фаз между соседними элементами, λ0 - расчетная длина волны излучения, d - расстояние между элементами.
В предлагаемом устройстве антенна состоит из 72 отдельных элементов, получающих питание со сдвигом по фазе на 120 градусов. В этом случае выражение (1) будет иметь вид cosα=λ0/3d=C/fok (2), где k=1/3d - постоянная антенной решетки. С учетом (2) принятая частота fпр=2Vk.
Такая конструкция антенны позволяет осуществлять автоматическое изменение угла наклона луча при изменении волны излучения (Senpaku, 1975, v.48, р.75-79).
Устройство лазерного зондирования 4 представляет собой твердотельный лазер, включающий активный элемент, помещенный в резонатор, имеющий в качестве выходного зеркала резонансный рефлектор, и кювету с фототропным раствором (авт.св. СССР №791157), в основу работы которого положен способ выделения оптических неоднородностей в рассеивающих средах (авт.св. СССР №1788485), включающий зондирование рассеивающей среды короткими импульсами оптического излучения, фотодетектирование рассеянного обратно излучения с временным разрешением Δτ, нахождение соотношений qi сигналов Si этого излучения, сравнение этих соотношений с пороговым уровнем, равным единице с учетом погрешности измерения сигналов рассеянного обратно излучения σS, и обработку результатов измерений с определением наличия границ раздела различных по составу сред, в котором дополнительно определяют качественный состав рассеивающих сред при сравнении соотношения qi с пороговым уровнем, равным единице, определяют отклонение этого соотношения от порогового уровня, а о наличии границ раздела различных по составу сред и измерения их качественного состава судят соответственно по превышению отклонения соотношения qi от порогового уровня σ - σS и абсолютному значению этого соотношения на границах неоднородностей, причем соотношение qi сигналов Si находят из выражения
qi=(Si+2/Si+1)2×Si-Si-1/Si+2-Si+3.
В качестве датчика атмосферного давления 17 использован датчик РТВ-10 (Финляндия) с пределами атмосферного давления 600 - 1100 гПа и точностью измерения 1 гПа. С атмосферой датчик соединяется тонкой эластичной трубкой, проходящей через верхнюю крышку и выходящий на траверсу, где расположены антенны буя.
В качестве датчика температуры воздуха 16 использован датчик ТСП-002-03 с диапазоном измерения от -50 до +60°С, с погрешностью, равной ±0,15°С.
В качестве датчика 18 гидродинамического давления использован датчик, разработанный ФГУП ОКБ Океанологической техники РАН, имеющий диапазон измерения давления от 0 до 10 м, с погрешностью 0,1%, а также и диапазон измерения температуры воды от -2 до +32°С с погрешностью 0,05°С.
Измеритель параметров среды 2 для обеспечения работы блоков определения средней скорости звука в воде 21 и классификации шума моря 25 содержит также гидрофоны (позиции 1-5 на фиг.6), снабженные параметрическими антеннами, и имеющими следующие характеристики: диапазон рабочих частот 15-50 кГц, частота волн накачки 125,5-148 кГц и 153-175,5 кГц. Тип излучаемого сигнала - прямоугольный радиоимпульс, линейно-частотно-модулированный импульсный сигнал, сигнал с перестраиваемой частотой от импульса к импульсу, длительность зондирующего импульса 1, 2, 4, 8, 16 и 32 мс, частота следования импульсов не более 2 Гц.
При этом электрические сигналы накачки с частотами накачки и заданным видом модуляции генерируются в формирователе сигналов и через усилители мощности подаются на преобразователь накачки, который излучает акустические колебания с частотами накачки. При распространении волн накачки в водной среде образуется параметрическая антенна волн разностной частоты с необходимыми характеристиками. Режимами работы формирователя (изменение длительности зондирующего импульса, изменение частоты посылки, изменение разностной частоты и закона ее модуляции) управляет схема управления формирователем. Рассеянные сигналы в результате взаимодействия волн разностной частоты и гидрофизических слоев принимаются приемной антенной, которая необходима, так как излучающая параметрическая антенна необратима, а преобразователь накачки на частоте разностной волны имеет низкую чувствительность из-за работы вдалеке от резонанса. Электрические сигналы через фильтр низких частот, в котором подавляются волны накачки, поступают на предварительный усилитель и затем на согласующее устройство, которое предназначено для согласования входных и выходных импедансов усилителя и аналого-цифрового преобразователя вычислительного модуля 3. Коэффициентами усиления приемной части, полосой пропускания в зависимости от типа сигнала и длительности импульса управляет устройство управления приемной частью.
Датчики солености, температуры и давления расположены непосредственно у преобразователя накачки и предназначены для измерения параметров водной среды в зоне взаимодействия волн накачки, которые необходимы в дальнейшем для вычисления изменения сигнала волны разностной частоты вдоль трассы их распространения по причинам, обусловленными тем, что генерация сигналов волн разностной частоты происходит в пространстве и их уровни не могут быть получены путем приведения к нормируемому уровню на определенном расстоянии, как это делается в традиционных излучающих антеннах, а также потому, что уровни зависят от значений параметров среды в зоне взаимодействия волн накачки. Сигналы с измерительных датчиков преобразуются в электрические сигналы и поступают на вычислительный модуль 3, который производит все вычисления для определения профилей температуры, солености, акустического сопротивления, скорости звука, и плотности среды с неоднородностями.
Определение параметров слоев гидрофизических неоднородностей производится путем их вычислений в следующей последовательности.
Сигналы с приемной антенны параметрического локатора 1, датчиков измерителя параметров среды 2, устройства лазерного зондирования 4 через соответствующие аналого-цифровые преобразователи поступают на вычислительный модуль 3, где они подвергаются обработке в части предварительной обработки, при которой вычисляются амплитуды отраженного сигнала и зондирующего сигнала в месте установки приемной антенны, согласованной обработки принятых сигналов, для точного определения положения рассеянных сигналов и определения различных моментов сигналов, анализа взаимных корреляционных связей сигналов, расчета коэффициентов отражений слоев, формирования исходных данных гидрофизических характеристик в месте установки преобразователя накачки, расчета характеристик зондирующего сигнала по трассе его распространения, что необходимо для вычисления истинного значения амплитуды и фазы волны разностной частоты, падающей на рассеиватель, калибровки зондирующего сигнала, измеренного в месте установки преобразователя накачки, расчета акустического импеданса слоев, расчета глубины расположения слоя, толщины слоя, и скорости звука в нем, расчета плотности слоев, формирования профилей температуры, солености, акустического сопротивления, плотности и скорости звука, расчета температуры и солености слоев.
Использование такой обработки позволяет, зная гидрофизические параметры слоя, расположенного у преобразователя накачки, рассчитывать последовательно слой за слоем параметры остальных слоев.
Блок определения волнения моря 27 представляет собой микропроцессорное устройство, состоящее из аналого-цифрового преобразователя, контроллера, оперативно запоминающего устройства, программируемого запоминающего устройства, субоптимального фильтра.
В основу измерения профиля волнения положен интегральный метод, основанный на косвенном определении профиля волнения исходя лишь из данных о вертикальной скорости перемещения устройства на водной поверхности в соответствии с зависимостью:
где S - перемещение устройства за время Т;
V(t) - скорость перемещения устройства.
Перемещение устройства в конкретный момент определяют по формуле

где S(t) - положение устройства в текущий момент;
S0 - положение устройства в предыдущий момент;
а - ускорение.
Данный метод позволяет полностью исключить из обработки грубые измерения высоты и получить информацию о движении дрифтера лишь по высокоточным данным о скорости.
Для исключения сильно зашумленных кодовых измерений высоты фазовыми скоростями перемещений дрифтера применен субоптимальный фильтр. Текущая оценка Zi с помощью любого линейного фильтра в виде суммы прогноза Zi и фильтрованной оценки текущего измерения:

где  - текущее значение измерения;
- текущее значение измерения;
α - коэффициент передачи определяет постоянную времени фильтра α=1τс;

Поскольку оценка Z формируется в спутниковых приемниках из высокоточных фазовых измерений, воспроизводящих динамику дрифтера с миллиметровой (субмиллиметровой) точностью формула (2) определяет самый высокоточный прогноз для любого линейного фильтра спутниковых измерений. Подставляя (2) в (1) получим α - БИХ фильтр, оптимальным образом сглаживающий кодовые измерения фазовыми:

Результатом обработки являются оптимальным образом сглаженные кодовые измерения, однако, данный фильтр не может убрать постоянный низкочастотный тренд ошибок высотных измерений, в силу достаточно большой величины α. Для исключения этого тренда достаточно применить к уже сглаженной оценке этот же самый фильтр повторно, но с большим коэффициентом α (глубокое сглаживание). Анализ низкочастотного шума позволяет сделать вывод, что компромиссным вариантом будет выбор α=0,15 1/с. Далее выполняется центрирование (вычитание из оценки тренда). После исключения тренда производится вычисление дисперсии полученной центрированной оценки:
где Нi - значения центрированного тренда,
N - количество значений в выборке.
Амплитуда колебаний выводится через дисперсию 
где A - искомая амплитуда, σ - средняя квадратичная ошибка.
Далее производится вычисление периода волн, методом подсчета числа пересечений волновым профилем нулевой линии.
При этом посредством спутниковой навигационной системы типа СН-3800 определяется вектор скорости течения водной поверхности по изменению горизонтального перемещения дрифтера.
Высота волны hi определяется как hi=r1+r2, где r1 - высота предыдущего полупериода, r2 - высота последующего полупериода. При наличии нескольких одинаковых максимальных амплитуд за полупериод для расчета высоты волны используется любая из них. После определения значений высот волн и их количества в реализации рассчитывается среднее значение высоты волны

где m - число волн за время измерения 20 минут.
Для определения высоты волны 3% обеспеченности из массива высот волн отбирается 20 максимальных волн, которые располагаются по мере убывания с присвоением порядкового индекса от 1 до 20, начиная с максимальной амплитуды. Затем вычисляется индекс 3% обеспеченности К3%=3m/100. Высота волны, соответствующая этому индексу, будет трехпроцентной.
Сбор и обработка измеренной информации осуществляется в спутниковом навигационно-измерительном модуле 28.
Скорость перемещения дрифтера V(t), определяемая посредством спутниковой навигационной системы, есть ничто иное, как скорость дрейфового течения Vд перемещения дрифтера, которое определяется как Vд=(0,0127/√sinφ)W, где φ - широта места, W - скорость ветра (см. Шулейкин В.В. Краткий курс физики моря. Л., Гидрометеорологическое издательство, 1959, с.40). Откуда скорость ветра может быть определена как W=Vд/0,0127√sinφ, что осуществляется посредством блока определения скорость ветра 26.
Гидроакустические антенны выполнены с возможностью обеспечения сдвига фазы на постоянный угол позволяет реализовать частотно-независимую антенну, что позволяет устранить влияние изменений скорости звука в воде и кроме того, появляется возможность измерения скорости перемещения дрифтера относительно дна или относительно водных слоев по сигналам объемной реверберации.
Ввиду того, что принятый сигнал характеризуется не одной фиксированной частотой, а спектром частот шириной Δfд, то положение этого спектра на оси частот относительно частоты излучения определяется средней доплеровской частотой и при перемещении дрифтера будет наблюдаться доплеровский сдвиг частоты fд=2Vд, где Vд - скорость дрифтера, которая может быть использована при анализе окончательных результатов исследований или для контроля перемещений дрифтеры в период проведения работ.
Устройство в целом выполнено в виде единой монолитной конструкции, в которой размещены измерительные блоки. В верхней части имеется крышка, служащая для установки измерительных блоков. На крышке установлена антенна спутниковой навигационной антенны. Заглубленная часть корпуса снабжена полиуретановым ступенчатым каркасом, выполненным в виде усеченной пирамиды, в нижней части которой размещены гидрофоны, четыре из которых ориентированы по частям света, соответственно, и еще один гидрофон ориентирован по вертикали в сторону дна. Ступенчатый каркас, расширяющийся к низу с установленными на нем гидрофонами, выполняет функцию стабилизирующего устройства и служит для гашения колебаний устройства в целом.
Технический результат, заключающийся в повышении достоверности при гидрометеорологических наблюдениях за акваторией морского полигона и в расширении функциональных возможностей аналогичных устройств, достигается за счет того, что распределение скорости звука по глубине определяют посредством лазерно-гидроакустического зондирования с выполнением гидрологических разрезов до слоя скачка в периодическом режиме посредством устройства, в которое дополнительно введен твердотельный лазер, включающий активный элемент, помещенный в резонатор, приемная антенна параметрического локатора выполнена в форме цилиндра с тангенциальной поляризацией, внутренняя поверхность цилиндра выполнена экранированной, цилиндр помещен в отражатель с наклонной образующей к основанию под углом 45 градусов, а приемная антенна состоит из n отдельных элементов, расположенных на равном расстоянии друг от друга, при этом на соседние элементы подается напряжение, сдвинутое по фазе на постоянный угол.
Промышленная реализация предлагаемого технического решения технической сложности не представляет так, как используются серийно освоенные изделия и апробированные аппаратные средства.
Источники информации
1. Патент РФ №2066466.
2. Патент РФ №1240169.
3. Современные донные станции для сейморазведки и сейсмологического мониторинга. / Зубко Ю.Н., Левченко Д.Г., Леденев В.В., Парамонов А.А. // Научное приборостроение, 2003, том 13, №4, с.70-82.
4. High-precision water-level monitoring / Massatoshi Harigae, Isao Yamaguchi, Tokio Kasai, Hirotaka Igava, Hiroto Nakanishi, Takahiro Murayama, Yasunori Iwanaka, Hirotaka Suko/GPS World, April 2005.
5. Патент US №6847362 B2, 25 января 2005.
6. Загородников А.А. Радиолокационная съемка морской поверхности с летательных аппаратов. Л., Судостроение, 1978, 376с.
7. Патент РФ №2079168 С1.
8. Воронин В.А., Тарасов С.П., Тимошенко В.И. Гидроакустические параметрические системы. Ростов-на-Дону. РостИздат, 2004, с.288-293.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2008 |
|
RU2376653C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2300781C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2453865C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2008 |
|
RU2374667C1 |
Способ гидрометеорологических наблюдений за акваторией морского полигона включает размещение на полигоне средств измерения гидрометеорологических параметров. Распределение скорости звука по глубине определяют посредством лазерно-гидроакустического зондирования с выполнением гидрологических разрезов до слоя скачка в периодическом режиме. Устройство для осуществления способа включает параметрический локатор, измеритель параметров среды и вычислительный модуль. Параметрический локатор состоит из двух перестраиваемых генераторов, двух импульсных модуляторов, импульсного генератора, двух усилителей мощности, преобразователя накачки, приемной антенны, приемного усилителя, регистрирующего устройства. В устройство дополнительно введен твердотельный лазер, включающий активный элемент, помещенный в резонатор. Приемная антенна выполнена в форме цилиндра с тангенциальной поляризацией, внутренняя поверхность цилиндра выполнена экранированной, цилиндр помещен в отражатель с наклонной образующей к основанию под углом 45 градусов. Технический результат - расширение функциональных возможностей устройства с одновременным повышением достоверности при гидрометеорологических наблюдениях за акваторией морского полигона. 2 н.п. ф-лы, 6 ил.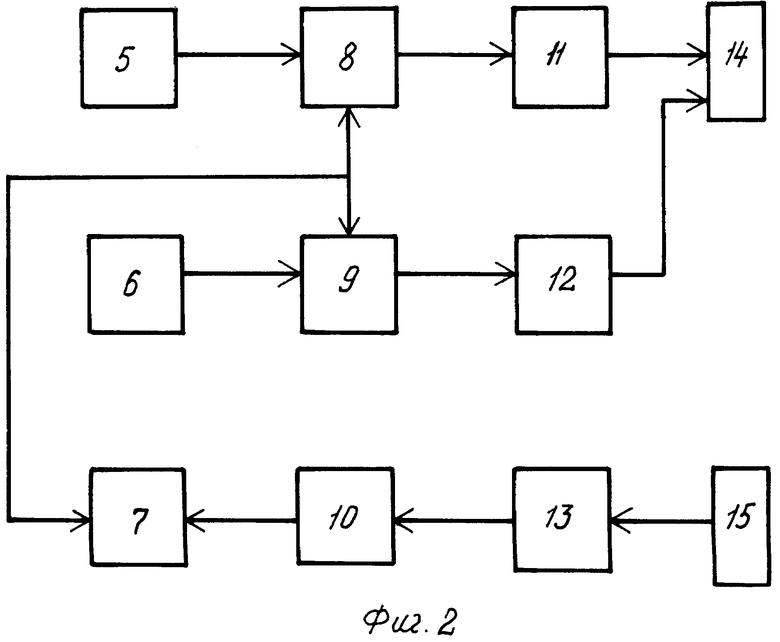
1. Способ гидрометеорологических наблюдений за акваторией морского полигона, включающий размещение на полигоне средств измерения гидрометеорологических параметров определения скорости ветра, волнения моря, классификацию шума моря по выделенному участку спектра, измерение гидроакустических сигналов, обработку измеренных сигналов, формирование профилей температуры, солености, акустического сопротивления, распределение скорости звука по глубине и плотности среды с неоднородностями, отличающийся тем, что распределение скорости звука по глубине определяют посредством лазерно-гидроакустического зондирования с выполнением гидрологических разрезов до слоя скачка в периодическом режиме.
2. Устройство для гидрометеорологических наблюдений за акваторией морского полигона по п.1, включающее параметрический локатор, измеритель параметров среды и вычислительный модуль, в котором параметрический локатор состоит из двух перестраиваемых генераторов, двух импульсных модуляторов, импульсного генератора, двух усилителей мощности, преобразователя накачки, приемной антенны, приемного усилителя, регистрирующего устройства, отличающееся тем, что дополнительно введен твердотельный лазер, включающий активный элемент, помещенный в резонатор, приемная антенна параметрического локатора выполнена в форме цилиндра с тангенциальной поляризацией, внутренняя поверхность цилиндра выполнена экранированной, цилиндр помещен в отражатель с наклонной образующей к основанию под углом 45°, а приемная антенна состоит из n отдельных элементов, расположенных на равном расстоянии друг от друга, при этом на соседние элементы подается напряжение, сдвинутое по фазе на постоянный угол.
| RU 2005133811 А, 10.05.2007 | |||
| Способ и устройство для центробежной отливки труб из плавленного диабаза или шлака | 1935 |
|
SU50545A1 |
| US 5767783 А, 16.06.1998 | |||
| RU 2004138959 А, 10.06.2006. | |||

