Изобретение относится к области навигации, а более конкретно к определению координат преимущественно подводных аппаратов.
Известна гидроакустическая синхронная дальномерная навигационная система [1], содержащая донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, М-канальный приемник, М измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно, М·N блоков преобразования временных интервалов в дистанции по N в каждом из каналов из М, М блоков выбора максимального значения дистанции из N значений и вычислитель координат объекта навигации, в котором в каждый из М каналов введены по числу лучевых траекторий N-1 дополнительных измерителей времени распространения гидроакустических сигналов, N-1 мультивибраторов задержки, N-1 мультивибраторов строб-импульса, N-1 селекторов, причем первые входы N-1 измерителей распространения соединены с выходом генератора синхроимпульсов, вторые входы соединены с первыми выходами соответствующих селекторов, а выходы соединены с М·N входами блока преобразования временных интервалов в дистанции, первый вход каждого из селекторов соединен с выходом соответствующего мультивибратора строб-импульса, второй вход соединен с выходом соответствующего канала приемника, вход первого мультивибратора задержки соединен с выходом соответствующего канала приемника, а выход каждого последующего мультивибратора задержки соединен с вторым выходом соответствующего селектора, в каждый из М каналов введена N(N-1), дополнительных блоков преобразования временных интервалов в дистанции, N-1 дополнительных блоков выбора максимального значения дистанции и усреднитель дистанции, причем входы каждого из N-1 наборов по N блоков преобразования временных интервалов в дистанции соединены с соответствующими выходами N-1 дополнительных измерителей временных интервалов, а выходы соединены с входами N-1 дополнительных блоков выбора максимального значения, выходы всех блоков выбора максимального значения дистанции соединены с N входами усреднителя дистанций, а выход усреднителя дистанций соединен с входом вычислителя координат объекта навигации.
Навигационная база таких систем, предварительно устанавливаемая на дне акватории, как правило, состоит из 12-16 маяков ответчиков и предварительно калибруется в относительных и в географических координатах (относительная и абсолютная калибровки) с помощью судна обеспечения, оснащенного бортовым комплексом спутниковой и гидроакустической системами навигации. После выработки своего энергетического ресурса маяки-ответчики заменяются, при этом производится новая калибровка донной навигационной базы. Данные системы позволяют обеспечить географическую привязку подводного аппарата в пределах площади до 100 квадратных километров и протяженностью до 50 километров.
Использование таких систем для навигации подводных аппаратов требует значительных затрат судового времени, большого количества донных маяков-ответчиков с длительным сроком автономности, ограничивает радиус действия подводного аппарата дальностью связи с донной навигационной базой.
При проведении научно-исследовательских работ с применением автономных подводных обитаемых аппаратов, выполнении оперативно-тактических задач подводными аппаратами на морских полигонах протяженностью до тысяч километров и площадью десятки тысяч квадратных километров особое значение приобретает оперативное высоконадежное обеспечение этих работ без использования судна обеспечения. Известная система, состоящая из размещенных донных маяков-ответчиков для обеспечения последующей географической привязки местонахождения подводного аппарата имеет существенные ограничения как по границам радиуса действия полигона, так по трудоемкости выполнения калибровочных работ и работ, связанных с размещением и установкой донных станций при каждой замене источников питания, имеющих ограниченный срок работы. Задачей настоящего технического предложения является повышение надежности при обеспечении навигации подводных объектов с одновременным расширением функциональных возможностей.
Поставленная задача решается за счет того, что в гидроакустической навигационной системе, содержащей навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенного на объекте навигации гидроакустического приемопередатчика, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками; приемная гидроакустическая антенна состоит из четырех гидрофонов, каждая секция антенны состоит из двух одноканальных и одного многоканального модуля, установленных на линейном несущем кронштейне, выполненным перфорированным, антенны приемников выполнены в форме сферической поверхности и размещены на стальной пластине, по крайней мере, один из М гидроакустических приемоответчиков установлен на водной поверхности.
Сущность предлагаемого способа поясняется чертежами.
Фиг.1. Схема формирования навигационной базы, где показаны подводный грунт, водная поверхность 2, донные гидроакустические приемоответчики 3, дрейфующий приемоотвегчик 4 на поверхности 2, снабженный спутниковым связным модулем 6 и гидроакустическим приемоответчиком 5, подводный объект 7, спутники 8 низкоорбитальной системы спутниковой навигации, спутники 9 среднеорбитальной системы спутниковой навигации.
Фиг.2. Поверхности положения подводного объекта в гидроакустической навигационной системе с ультракороткой базой, где показаны приемники 10, 11, 12, 13, подводный объект 7 или донный гидроакустический приемоответчик 3.
Фиг.3. Взаимное расположение приемников секции антенны, где позициями 14, 15, 16, 17 обозначены секции антенны.
Фиг.4. Функциональная схема приема сигнала "включение", которая включает формирователь характеристики направленности (ФХН) 18, широкополосный фильтр 19 с коррекцией амплитудно-частотной характеристики, ограничитель 20, узкополосный фильтр 21, детектор 22, интегратор 23, пороговую схему 24.
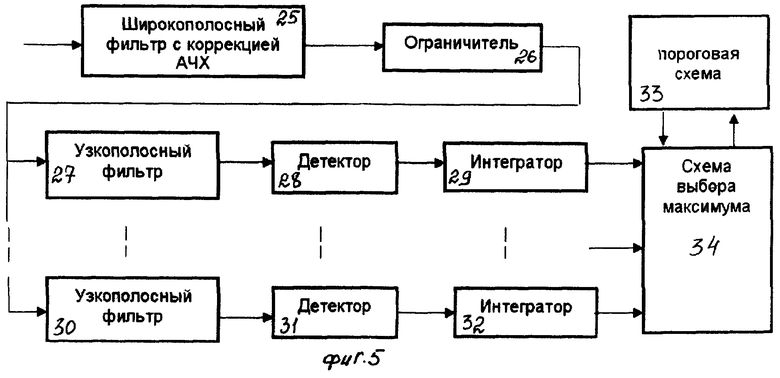
Фиг.5. Функциональная схема обработки сигналов, которая включает широкополосный фильтр 25 с коррекцией амплитудно-частотной характеристики, ограничитель 26, узкополосный фильтр 27, детектор 28, интегратор 29, узкополосный фильтр 30, детектор 31, интегратор 32, пороговую схему 33, схему выбора максимума 34.
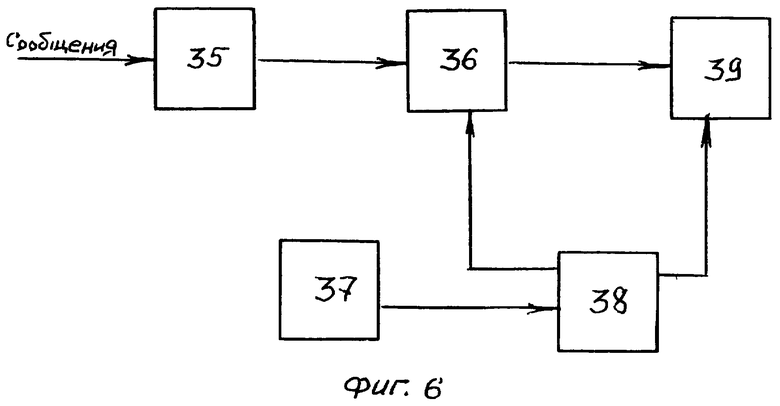
Фиг.6. Спутниковый связной модуль, который включает кодер 35, устройство формирования 36 пакетов сообщений на передачу, устройство формирования 37 алгоритма передачи пакетов сообщений, устройство управления 38 с программой работы передатчика на излучение (3-8 раз/сутки), антенну 33 ненаправленного типа.
Дрейфующий приемоответчик 4 представляет собой устройство, состоящее из полиуретанового корпуса, на котором установлена мачта с размещенными на ней спутниковой антенной и при необходимости метеорологическими датчиками. Внутри корпуса установлена аппаратура измерения, обработки и хранения информации.
При установке большой группы дрейфующих станций средства связи могут также включать ретранслятор, который осуществляет прием радиосигнала от дрейфующей станции в диапазоне ДМВ (401-403 МГц), объединение с сигналами других дрейфующих станций в общий групповой сигнал и одновременную передачу на наземные пункты приема в двух стволах диапазона СМВ (4/6, 7/8 ГГц), а при необходимости в состав средств связи может входить и береговая станция спутниковой связи, которая осуществляет прием излучаемого группового сигнала ретранслятора и содержит аппаратуру восстановления сообщений, включающую декодер и устройство обработки и восстановления сообщений, запоминающее устройство, устройство управления.
Обработка сообщений включает помехоустойчивое кодирование, разбивку каждого сообщения на пакеты с длительностью, зависящей от состояния взволнованной поверхности, передачу пакетов сообщения на ретранслятор по алгоритму, автоматически формируемому в зависимости от морского волнения, которое определяется посредством спутниковой навигационной системы в соответствии с известными алгоритмами (см., например, описание к патенту РФ №2254600).
Применение дрейфующих приемоответчиков, установленных на дрифтерах, оснащенных GPS приемником и аппаратурой гидроакустического канала связи, в качестве навигационных маяков, расположенных на морской поверхности, в сочетании с донными приемоответчиками позволяет обеспечить высокоточную навигацию для подводных объектов.
Очевидно, что расположение навигационного маяка-дрифтера на морской поверхности не требует проведения относительной и абсолютной калибровок полигона, который необходим при использовании донных гидроакустических маяков-ответчиков, так как наличие у дрифтера GPS приемника позволяет ему «знать» свои географические координаты в реальном масштабе времени с высокой точностью (например, точность определения координат посредством спутникового навигационного измерительного модуля типа СНИМ разработки российской фирмы «Навис» не хуже 5 метров). При этом по запросу принимать сигналы от донных приемоответчиков для уточнения их координат, которые подвержены смещению от первоначальных мест установки при влиянии факторов, обусловленных влиянием подводных течений и литодинамическими процессами. Навигация подводного объекта относительно донных приемоответчиков и дрейфующей станции или базы из дрейфующих станций может осуществляется как в режиме с длинной, ультракороткой базой (ДБ и УКБ), так и в комбинированном режиме ДБ/УКБ.
Подводный объект оснащается соответствующими режиму работ гидроакустическими приемо-передающими антеннами, навигационным контроллером и навигационным программно-математическим обеспечением.
Маяк-дрифтер работает в режиме «запрос-ответ» и в режиме «пингер» (маяк). В режиме с длинной базой для определения координат подводного объекта используются сигналы минимум от 3-4 маяков-дрифтеров (аналогично, как в спутниковой GPS) и решается триангуляционная задача. При этом площадь или протяженность зоны действия системы зависит от энергетической дальности действия гидроакустической связи, количества дрифтеров, глубины расположения подводного объекта, гидрологии, шумов подводного объекта и морской поверхности. При этом в отличие от навигации с использованием только донной навигационной базы совместная навигация с посредством маяков-дрифтеров и донных приемоответчиков существенно расширяет функциональные возможности подводного объекта, дает возможность оперативно оборудовать рабочий полигон любой площади и протяженности необходимым количеством дрифтеров, позволяет подводному объекту определять свои координаты в реальном времени, оперативно менять свои тактические задачи без потери навигационной информации, получать данные по своим координатам в любое необходимое время или постоянно в автоматическом режиме.
При навигации подводного объекта при ее работе на глубинах более одного километра целесообразно работать на частотах в диапазоне от 8 до 15 кГц при этом энергетическая дальность связи с маяком-дрифтером будет достигать 10-14 км, а погрешность определения координат аппарата составит 7-10 метров в режиме ДБ и 0,3% от дальности в режиме УКБ и 0,5 град, по углу пеленгации. При рабочей глубине менее одного километра целесообразно использовать рабочие частоты в диапазоне 25-35 кГц и работать в режиме УКБ. При этом максимальная дальность связи будет достигать порядка 3 км.
При этом каждый сигнал маяка-дрифтера имеет специальный формат и кодировку и несет в себе информацию о географических координатах маяка-дрифтера и донных приемоответчиков, его индивидуальном номере, направлении и скорости его перемещения на поверхности относительно донных приемоответчиков. Алгоритм работы навигационной системы с применением дрифтеров имеет гибкую структуру и может быть легко адаптирован как под заранее прокладываемый маршрут подводного объекта на полигоне, так и под определение координат подводного объекта в любое конкретное время ее работы на полигоне в различных гидрологических условиях, условиях шума, в том числе с соблюдением условия защиты от обнаружения.
Подводный объект фиксирует дистанцию и пеленг до маяка-дрифтера (режим УКБ) и вычисляет свои точные географические координаты, используя информацию, принятую от маяка-дрифтера по гидроакустическому каналу связи. Скорость передачи по гидроакустическому каналу связи может составлять 9600-12400 бод. Наиболее оптимальная дальность связи в режиме УКБ, при глубине подводного объекта до 500 метров - 1 км. Точность определения координат до 5 метров.
Наличие гидроакустического канала связи между дрифтером, донными приемоответчиками и подводным объектом позволяет также обеспечивать передачу служебной информации из наземного Центра на подводный объект по спутниковому телеметрическому связному каналу через дрейфующую станцию, находящуюся в зоне гидроакустической связи с подводным объектом.
В предлагаемом устройстве, представляющем собой гидроакустическую навигационную систему применена комбинированная система гидроакустической навигации с длинной и ультракороткой базой, которая позволяет использовать пеленгационную систему решения задачи выхода подводного объекта в точку установки дрейфующей станции или донного приемоответчика. При этом гидроакустическая антенна донных приемоответчиков, как и подводного объекта, представляет две имеющие общий центр базы из приемников. При этом, если две приемные базы расположены в плоскости, параллельной плоскости палубы, и ортогональны, ось одной базы направлена вдоль осевой линии подводного объекта, а ось другой базы направлена по траверзу вправо.
Две имеющие общий центр базы из приемников позволяют определить направление на источник сигнала как линию пересечения двух конических поверхностей с совпадающими вершинами. Сдвиг фаз Δφ1 электрических сигналов двух точечных приемников (первого второго), поступающих на входы приемного тракта, связан с углом между базовой линией и направлением прихода сигнала соотношением
Δφ1=kcosα, где α - угол прихода сигнала, k - коэффициент, равный k=2πf0 b/c, где b - длина базовой линии, f0 - несущая частота, с - скорость звука в точке приема сигнала. Таким образом α=arccos (Δφ1/k). Сдвиг фаз Δφ2 электрических сигналов двух точечных приемников (третьего и четвертого), поступающих на входы приемного тракта, связан с углом между базовой линией и направлением прихода соотношением Δφ2=kcosβ,
β=arccosΔφ2/k. Введя вспомогательные углы φ и Ψ (фиг.2), получим, что при известной глубине Н подводного объекта выражения для координат подводного объекта Х0, У0 относительно центра базы. При этом плоскость с ординатой Н является третьей поверхностью положения. Очевидно, что cosΨ=D/R, где D - дистанция, R - наклонная дальность, cosΨ=x/D, cosα=x/R(cosΨcosφ)=(Dx)/(RD)=x/R, cosβ=y/R(cosΨcosφ)=(Dy)/(RD)=yR.
При этом cosα=cosΨcosφ, cosβ=cosΨsinφ, Х0=Hcosφ/tgΨ, Y0=Hsinφ/tgΨ. Откуда получаем х0=сНΔφ1/а; у0=сНΔφ2/b. Так как плоскость палубы практически никогда не совпадает с плоскостью горизонта, то учитываются также влияние углов крена  и дифферента γ. Дифферент не сказывается на значении у0, а крен на значении х0, ось X направлена вдоль продольной оси подводного объекта, а ось У направлена по траверзу. Исправленные путем учета крена и дифферента значения координат маяка можно записать следующим образом: х1=Htg[arctg([0/H)+γ],
и дифферента γ. Дифферент не сказывается на значении у0, а крен на значении х0, ось X направлена вдоль продольной оси подводного объекта, а ось У направлена по траверзу. Исправленные путем учета крена и дифферента значения координат маяка можно записать следующим образом: х1=Htg[arctg([0/H)+γ],  , где γ и - положительные значения при опускания носа и правого борта.
, где γ и - положительные значения при опускания носа и правого борта.
Информация о координатах дрейфующей станции относительно подводного объекта позволяет решить задачу выхода подводного объекта в реперную точку, так как она легко преобразуется в значения курсового угла КУ и дистанции D: КУ=arctg(y,x),
 . Решение обратной задачи дает возможность определить координаты подводного объекта на карте или планшете, на который предварительно наносится реперная точка. В том случае, когда определяется также наклонное расстояние до дрейфующей станции или донного приемоответчика, третьей поверхностью положения является сфера с радиусом, равным наклонному расстоянию. Формулы для вычисления координат упрощаются и имеют вид х0=(сRΔφ12)/α, у0=(cRΔφ32)/β.
. Решение обратной задачи дает возможность определить координаты подводного объекта на карте или планшете, на который предварительно наносится реперная точка. В том случае, когда определяется также наклонное расстояние до дрейфующей станции или донного приемоответчика, третьей поверхностью положения является сфера с радиусом, равным наклонному расстоянию. Формулы для вычисления координат упрощаются и имеют вид х0=(сRΔφ12)/α, у0=(cRΔφ32)/β.
Каждая приемная гидроакустическая антенна состоит из четырех гидрофонов. Секция антенны состоит из двух одноканальных и одного двухканального модуля, располагающихся на линейном несущем кронштейне. Расстояние между приемными гидрофонами двухканального модуля составляет 50 мм. Максимальное разнесение крайних приемников на кронштейне составляет 1000 мм. Кронштейн перфорирован, что позволяет располагать приемники в непосредственной близости друг от друга для проведения фазовой калибровки и с произвольным разнесением для проведения измерений направления прихода акустического сигнала. В качестве приемников-гидрофонов использованы пьезокерамические сферы диаметром 30 мм, внутри которых размещены предварительные усилители с коэффициентом усиления 30 дБ. Сферы размещаются на стальной пластине размером 145×145×10 мм, снабженной элементами крепления и акустической заглушкой с тыльной стороны. Коэффициент подавления звукового сигнала с тыльной стороны составляет не менее 30 дБ.
Антенный комплекс состоит из 8-канальной 2-секционной приемной гидроакустической антенны и гидроакустической излучающей антенны. Каждая секция приемной антенны представляет собой 4-элементный неэквидистантный гидрофонный модуль, предназначенный для измерения проекции вектора прихода акустического сигнала на одну из горизонтальный осей в режиме ультракороткой базы, в пеленгационном режиме, либо для приема сигналов в режиме длинной базы на 4 рабочих частотах. Секции приемной антенны расположены в горизонтальной плоскости перпендикулярно друг к другу.
Таким образом, когда все гидрофоны производят прием на одной и той же рабочей частоте, реализуется режим определения задержки и направления прихода отклика от фиксированной дрейфующей станции или донного приемоотвегчика в режиме ультракороткой базы, а когда каждый из гидрофонов настроен на свою рабочую частоту, осуществляется режим измерения задержек от нескольких донных приемоответчиков и дрейфующих станций в режиме длинной базы.
Система передачи информации по гидроакустическому каналу на подводном объекте реализуется с использованием штатных средств гидроакустической связи. При этом в качестве устройств формирования и обработки сигналов могут быть применены как имеющая в составе гидроакустическая аппаратура, обеспечивающая режим гидроакустической связи, так и дополнительные устройства в виде приставок, подключаемых к их передающему и приемному трактам.
В качестве сигналов местоположения использованы тональные сигналы с частотой 3 кГц, излучаемые как в автоматическом режиме по специальной программе, так и в режиме запроса.
Для систем передачи информации, основанных на использовании тональных сигналов, помехоустойчивость системы определяется помехоустойчивостью обнаружителей сигнала "Включение" и обнаружителей информационных сигналов. Для обнаружения сигналов "Включение", представляющих собой отрезок гармонического колебания использован метод неоптимального некогерентного приема, обеспечивающий широкополосный прием с интегрированием после детектора 22. Функционально схема включает ФХН 18, обеспечивающий предварительное усиление и формирование ненаправленного пространственного канала с антенны дрейфующей станции, широкополосный фильтр 19 с полосой ΔFш, ограничитель 20 и узкополосный фильтр 21 с полосой ΔFy, образующую схему, обеспечивающую, при условии Fш/ΔF>>1, стабилизацию помехи и подавления импульсной (широкополосной) помехи и обеспечивает выравнивание спектра помехи на входе ограничителя 20, узкополосный фильтр 21, обеспечивающий формирование рабочих частот, детектор 22, имеющий линейную характеристику, интегратор 23, представляющий собой фильтр нижних частот с эффективной полосой пропускания ΔFu=1/Т, где Т=2 сек (длительность символа), пороговую схему 18, построенную на основании критерия Неймана-Пирсона, поскольку вероятность появления на ее входе сигнала существенно ниже вероятности его отсутствия.
Функциональная схема обработки сигнала (фиг.5) включает широкополосный фильтр 25 с полосой ΔFш, ограничитель 26 и узкополосный фильтр 27 с полосой Δfy, которые образуют схему, обеспечивающую, при условии ΔFш/ΔFy>>1, стабилизацию помехи и подавления импульсной (широкополосной) помехи и выравнивание спектра помехи на входе ограничителя 26, детектор 28, имеющий линейную характеристику, интегратор 29, который представляет собой фильтр нижних частот с эффективной полосой пропускания ΔFu=1/Т, где Т=0,5 сек (длительность символа), схему выбора максимума 34, обеспечивающую отбор максимального сигнала для последующего сравнения его с заданным порогом, пороговую схему 33, построенную на основании критерия идеального наблюдателя, поскольку весомость ошибок типа "ложная тревога" и типа "пропуск сигнала" можно считать одинаковым, то порог в схеме выбран из условия минимизации полной вероятности ошибки, при этом после превышения порога в схему выбора максимума 34 поступает команда, отключающая канал с максимальным сигналом. Таким образом, обработка сигнала при приеме сообщения сводится к обнаружению отдельных тональных сигналов с вероятностями F и D такими, чтобы сумма F+(1-D) не превышала 0,01, причем F+1-D. Спутниковый связной модуль предназначен для формирования пакетов и алгоритмов управления передаваемой информации на донные приемоответчики.
В отличие от известного устройства в предлагаемом устройстве дрейфующая станция, снабженная соответствующей аппаратурой, находясь в дрейфе, имеет возможность непрерывно принимать сигналы низкоорбитных и среднеорбитных спутниковых навигационных систем, обрабатывать их с определением высокоточных собственных координат в любой момент времени, а также определять действительное местоположение донных приемоответчиков. В определенный момент времени (по сигналу запроса с подводного объекта или по программе работы дрейфующей станции) эта информация передается по гидроакустическому каналу в виде шумоподобного кодированного сигнала определенного формата непосредственно на подводный объект или на донные приемоответчики. Определив свои координаты относительно дрейфующей станции и имея информацию о географических координатах последней, подводный объект выполняет собственное координирование в географической системе координат.
Для увеличения ресурса питания донных приемоответчиков они работают только в периодическом режиме. Их включение и выключение осуществляется по сигналам от дрейфующей станции.
Источник информации
1. Патент РФ №2032187.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2453865C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2416070C1 |
Изобретение относится к области подводной навигации, а именно к определению координат подводного объекта. Гидроакустическая навигационная система содержит навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенный на объекте навигации, гидроакустический приемопередатчик, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками. Приемная гидроакустическая антенна состоит из четырех гидрофонов, каждая секция антенны состоит из двух одноканальных и одного многоканального модуля, установленных на линейном несущем кронштейне, выполненном перфорированным, антенны приемников выполнены в форме сферической поверхности и размещены на стальной пластине, по крайней мере, один из М гидроакустических приемоответчиков, установлен на водной поверхности. Технический результат - повышение надежности при обеспечении навигации подводных объектов. 6 ил.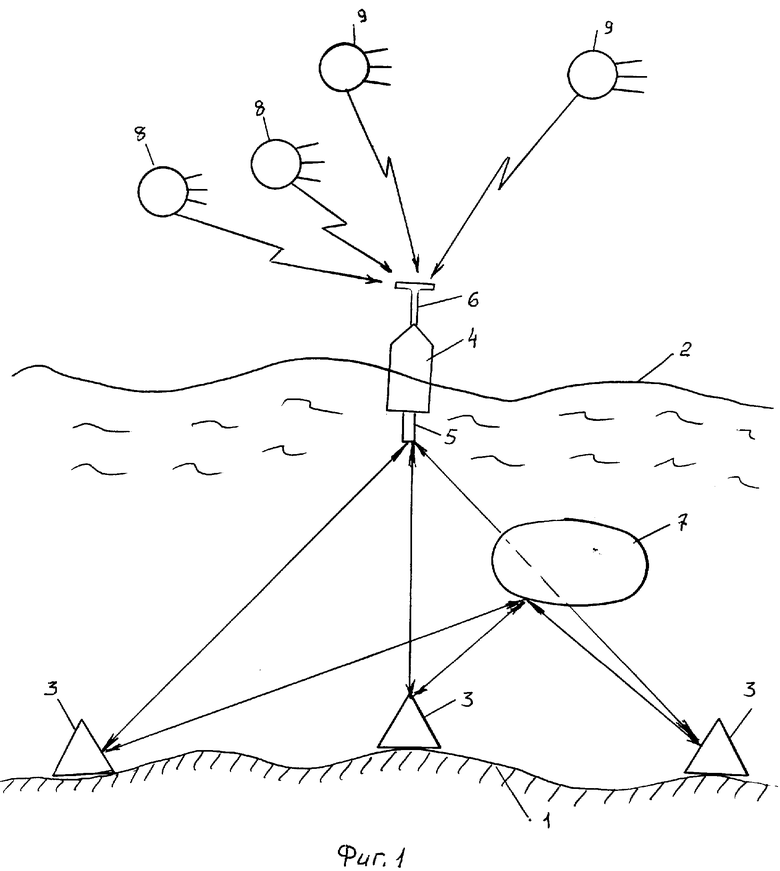
Гидроакустическая навигационная система, содержащая навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенного на объекте навигации гидроакустического приемопередатчика, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками, отличающаяся тем, что приемная гидроакустическая антенна состоит из четырех гидрофонов, каждая секция антенны состоит из двух одноканальных и одного многоканального модулей, установленных на линейном несущем кронштейне, выполненном перфорированным, антенны приемников выполнены в форме сферической поверхности и размещены на стальной пластине, по крайней мере, один из М гидроакустических приемоответчиков установлен на водной поверхности.
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2032187C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2308054C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ МЕЛКОГО МОРЯ | 1999 |
|
RU2158431C1 |
| US 7196971 В2, 27.03.2007 | |||
| US 4972385 А, 20.11.1990. | |||

