Предложенные устройство и способ относятся к сканирующей зондовой микроскопии, а более конкретно к устройствам и способам, обеспечивающим точное, трехкоординатное перемещение в плоскости объекта, а также изменение угла плоскости объекта.
Известен пьезопривод, содержащий держатель с цилиндрическим пьезоэлементом, на внутренней поверхности которого нанесен сплошной электрод, а на наружной - несколько групп электродов [1].
Недостаток указанного устройства заключается в невозможности выбора требуемого диапазона перемещений, что снижает его функциональные возможности.
Известен пьезопривод, состоящий из набора пьезотрубок одного диаметра с параллельными торцами и сплошными электродами на наружной и внутренней поверхностях, соединенных соосно друг с другом по торцам соединительными элементами, а с первым и вторым основанием свободными торцами [2].
Недостаток указанного устройства заключается в отсутствии у пьезопривода возможности перемещения в плоскости, перпендикулярной оси пьезотрубок, что сужает его функциональные возможности и не позволяет использовать в качестве пьезосканера.
Известен также пьезосканер, содержащий основание с закрепленной на нем одним концом первой пьезотрубкой с разделенными электродами на наружной и внутренней поверхностях, соединительный элемент, установленный на другом конце первой пьезотрубки и содержащий одним концом закрепленную на нем вторую пьезотрубку с разделенными электродами на наружной и внутренней поверхностях, а также держатель зонда, закрепленный на другом конце второй пьезотрубки [3].
Основной недостаток указанного устройства заключается в том, что при сканировании происходит изменение угла плоскости держателя объекта (зонда). Это приводит к тому, что приведенный пьезосканер практически не пригоден к использованию в нем линеек и матриц зондов.
Известен также пьезосканер, содержащий пьезотрубку с электродами на наружной и внутренней поверхностях, одним концом закрепленную на основании, а другим соединенную с держателем объекта [4].
Указанное устройство выбрано в качестве прототипа предложенного решения.
Первый недостаток указанного устройства заключается в том, что при сканировании секции пьезотрубки, не участвующие в функциональном перемещении, препятствуют изгибу пьезосканера и уменьшают его диапазон.
Второй недостаток заключается в том, что плоскость держателя объекта изменяет угол наклона при сканировании, что сужает возможности использования пьезосканера.
Известен также способ сканирования в зондовой микроскопии, включающий объединение основных электродов пьезосканера таким образом, что наружный электрод первого фрагмента пьезосканера объединен с внутренним электродом второго фрагмента пьезосканера, расположенного напротив первого фрагмента, а внутренний электрод первого фрагмента объединен с наружным электродом второго фрагмента, наружный электрод третьего фрагмента пьезосканера, расположенного между первым и вторым фрагментами, объединен с внутренним электродом четвертого фрагмента, расположенного напротив третьего фрагмента, а внутренний электрод третьего фрагмента объединен с наружным электродом четвертого фрагмента, подачу пилообразного напряжения на электроды первого и второго противоположных фрагментов и осуществление их синхронных С-образных изгибов по первой координате с формированием строчной развертки, а также пошаговое увеличение напряжения на электродах третьего и четвертого противоположных фрагментов после каждой подачи пилообразного напряжения и осуществление их синхронных С-образных изгибов по второй координате для перехода на следующую строку [4].
Недостатки указанного способа заключаются в уменьшении диапазона сканирования, связанном с подачей пилообразных напряжений только на два фрагмента, и сужении функциональных возможностей способа.
Технический результат изобретения заключается в увеличении диапазона сканирования и расширении функциональных возможностей пьезосканера многофункционального и способа сканирования в зондовой микроскопии.
Указанный технический результат достигается тем, что в пьезосканере, содержащем пьезотрубку с электродами на наружной и внутренней поверхностях, одним концом закрепленную на основании, а другим соединенную с держателем объекта, на пьезотрубке вдоль продольной оси выполнены четыре сквозных паза, образующих четыре фрагмента пьезотрубки, на каждом из которых сформированы основные электроды: по меньшей мере, по два электрода на наружной поверхности (наружные электроды) и по два электрода на внутренней поверхности (внутренние электроды), расположенные напротив наружных электродов, при этом электроды в виде прямоугольников на цилиндрической поверхности расположены вдоль пазов параллельно друг другу и имеют индивидуальные выводы.
Возможен вариант выполнения электродов, при котором на каждом фрагменте пьезотрубки сформированы дополнительные электроды, по четыре электрода на наружной поверхности (наружные электроды) и по четыре электрода на внутренней поверхности (внутренние электроды), расположенные напротив наружных электродов, при этом электроды расположены попарно вдоль сквозных пазов параллельно друг другу, последовательно основным электродам и имеют индивидуальные выводы.
Существуют варианты, в которых сквозные пазы выполнены на всю длину пьезотрубки и на часть длины пьезотрубки.
Существуют также варианты, в которых держатель объекта соединен с пьезотрубкой со стороны сквозных пазов пьезотрубки и с противоположной ее стороны.
Возможно также выполнение места соединения фрагментов пьезотрубки с держателем объекта или основанием посредством шарниров.
При увеличенных амплитудах сканирования возможно выполнение концов сквозных пазов под тупыми углами к внутренней поверхности пьезотрубки, при этом места пьезотрубки в зоне пересечения пазов с внутренней ее поверхностью скруглены.
Кроме этого, указанный технический результат достигается тем, что в способе сканирования в зондовой микроскопий, включающем одновременную подачу первого и второго основных пилообразных напряжений на прямо объединенные основные электроды первого и второго противоположных фрагментов, осуществление их синхронных С-образных изгибов по первой координате и строчную развертку, одновременное пошаговое увеличение первого и второго основных постоянных напряжений на прямо объединенных основных электродах третьего и четвертого фрагментов после каждой подачи первого и второго основных пилообразных напряжений и осуществление их синхронного С-образного изгиба по второй координате с пошаговым смещением на следующую строку, электроды объединяют программно, одновременно с подачей первого и второго основных пилообразных напряжений на прямо объединенные основные электроды первого и второго фрагментов и для осуществления их синхронных С-образных изгибов по первой координате на перекрестно объединенные основные электроды третьего и четвертого фрагментов подают третье и четвертое основные пилообразные напряжения и осуществляют С-образные изгибы третьего и четвертого фрагментов по первой координате синхронно с С-образными изгибами первого и второго фрагментов.
Существует вариант, в котором на основные перекрестно объединенные электроды третьего и четвертого фрагментов подают третье и четвертое основные пилообразные напряжения, отличные друг от друга по амплитуде, осуществляют С-образные изгибы третьего и четвертого фрагментов по первой координате разной величины и дополнительно производят разворот держателя объекта вокруг продольной оси симметрии пьезотрубки.
Существует также вариант, в котором на прямо объединенные дополнительные электроды первого и второго фрагментов одновременно с подачей первого и второго основных пилообразных напряжений на основные электроды первого и второго фрагментов подают дополнительные первое и второе пилообразные напряжения и осуществляют двойной разнонаправленный С-образный изгиб первого фрагмента и двойной разнонаправленный С-образный изгиб второго фрагмента, синхронно обоих фрагментов по первой координате, формируя строчную развертку, на дополнительных электродах третьего и четвертого фрагментов одновременно с пошаговым увеличением первого и второго постоянных напряжений на прямо объединенных основных электродах третьего и четвертого фрагментов производят пошаговое увеличение дополнительных первого и второго постоянных напряжений и осуществляют двойной разнонаправленный С-образный изгиб третьего фрагмента и двойной разнонаправленный С-образный изгиб четвертого фрагмента, синхронно обоих фрагментов по второй координате и производят плоскопараллельное перемещение держателя объекта и смещение на следующую строку.
Возможен вариант, в котором на перекрестно объединенные дополнительные электроды третьего и четвертого фрагментов одновременно с подачей третьего и четвертого основных пилообразных напряжений на перекрестно объединенные основные электроды третьего и четвертого фрагментов подают дополнительные третье и четвертое пилообразные напряжения и осуществляют двойной разнонаправленный С-образный изгиб третьего фрагмента и двойной разнонаправленный С-образный изгиб четвертого фрагмента, синхронно обоих фрагментов по первой координате и производят плоскопараллельное перемещение держателя объекта, формируя строчную развертку.
Возможен также вариант, в котором на перекрестно объединенные дополнительные электроды третьего и четвертого фрагментов подают дополнительные третье и четвертое пилообразные напряжения, отличные друг от друга по амплитуде, осуществляют двойной разнонаправленный С-образный изгиб третьего фрагмента и двойной разнонаправленный С-образный изгиб четвертого фрагмента по первой координате различной величины и дополнительно производят разворот держателя объекта вокруг оси симметрии пьезотрубки с сохранением его плоскопараллельного перемещения.
Возможен также вариант, в котором на прямо объединенные основные и дополнительные прямо объединенные электроды первого и второго фрагментов подают первое и второе пилообразные напряжения, разные по амплитуде, осуществляют их двойные разнонаправленные С-образные изгибы по первой координате различной величины и коррекцию угла наклона плоскости держателя объекта по первой координате, на прямо объединенных основных и дополнительных электродах третьего и четвертого фрагментов осуществляют пошаговое увеличение первого и второго постоянных напряжений, разных по величине, и осуществляют двойные разнонаправленные С-образные изгибы различной величины по второй координате и коррекцию угла наклона плоскости держателя объекта по второй координате.
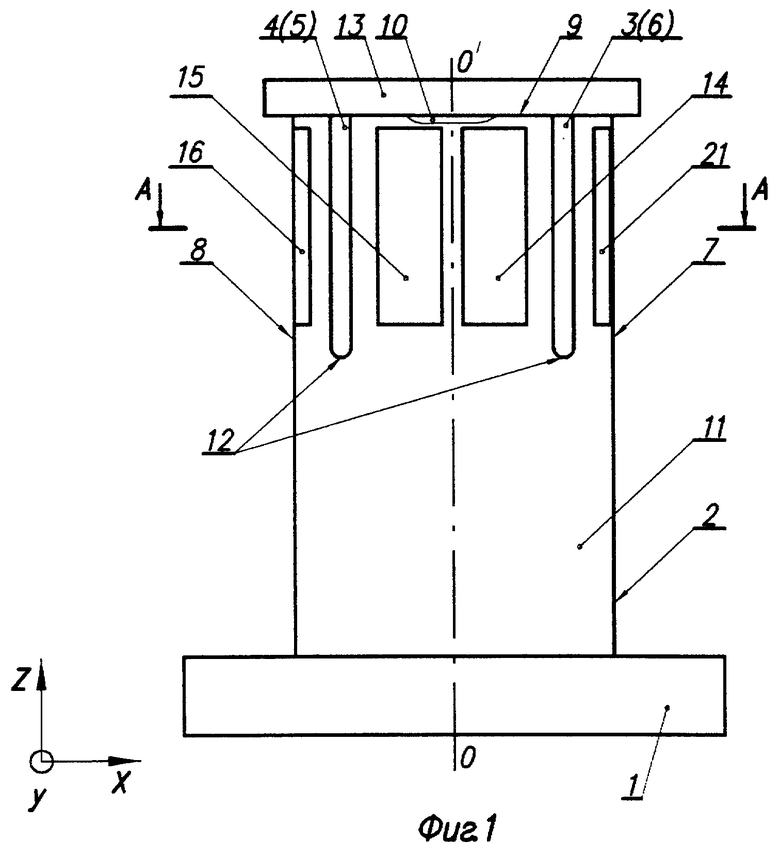
На фиг.1 изображен пьезосканер многофункциональный с четырьмя электродами на каждом фрагменте (четырехэлектродный), вид сбоку.
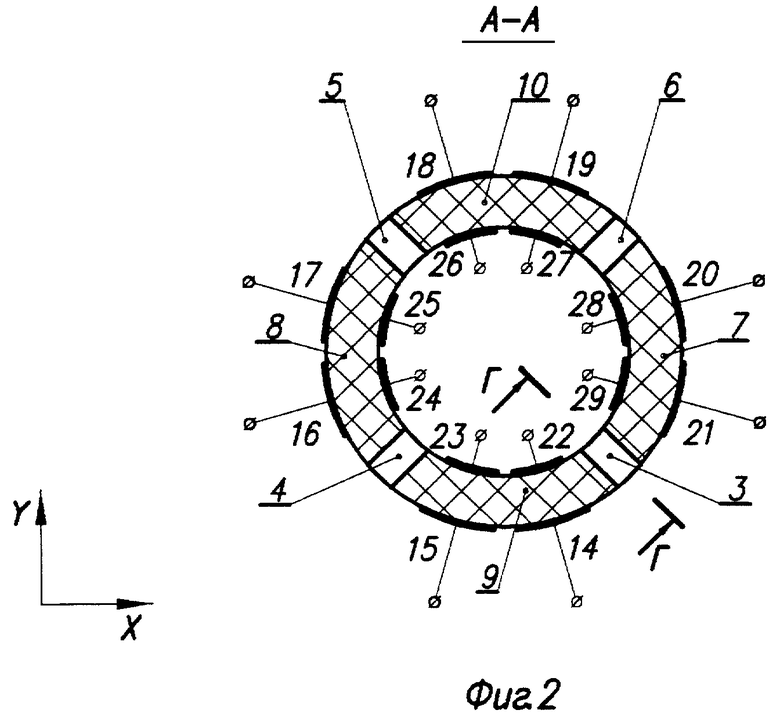
На фиг.2 - сечение пьезосканера, перпендикулярное продольной оси симметрии пьезотрубки.
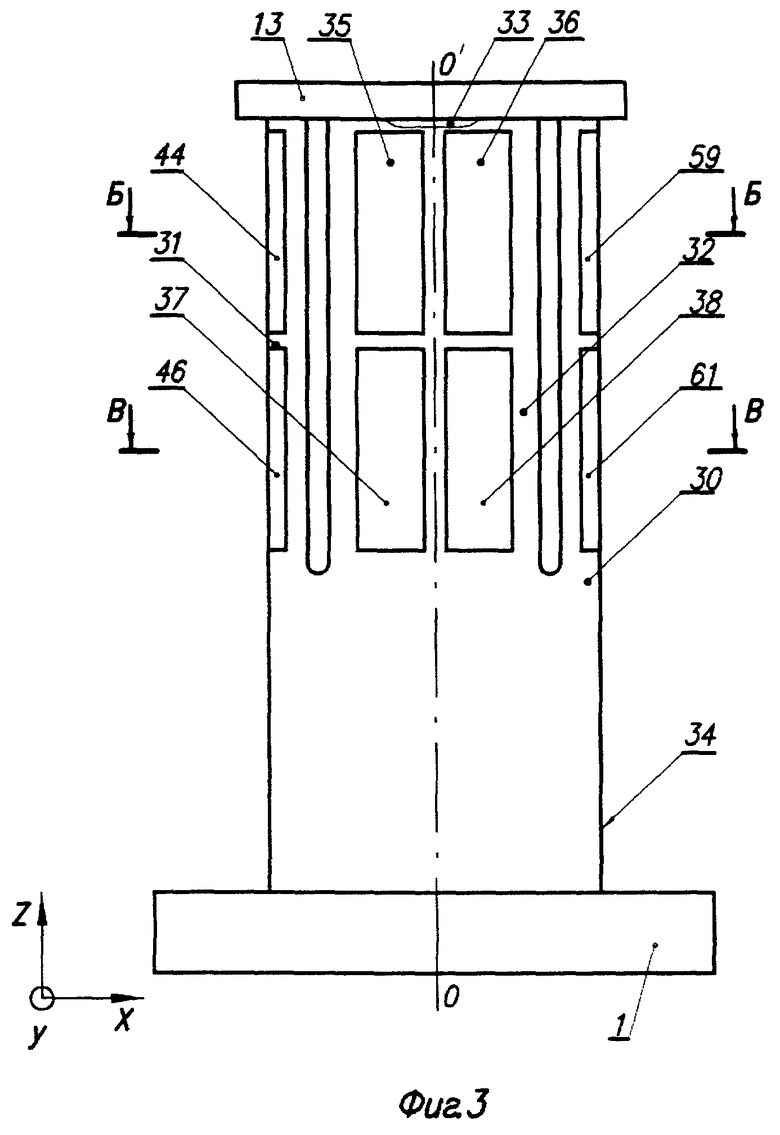
На фиг.3 изображен пьезосканер многофункциональный с восемью электродами на каждом фрагменте (восьмиэлектродный).
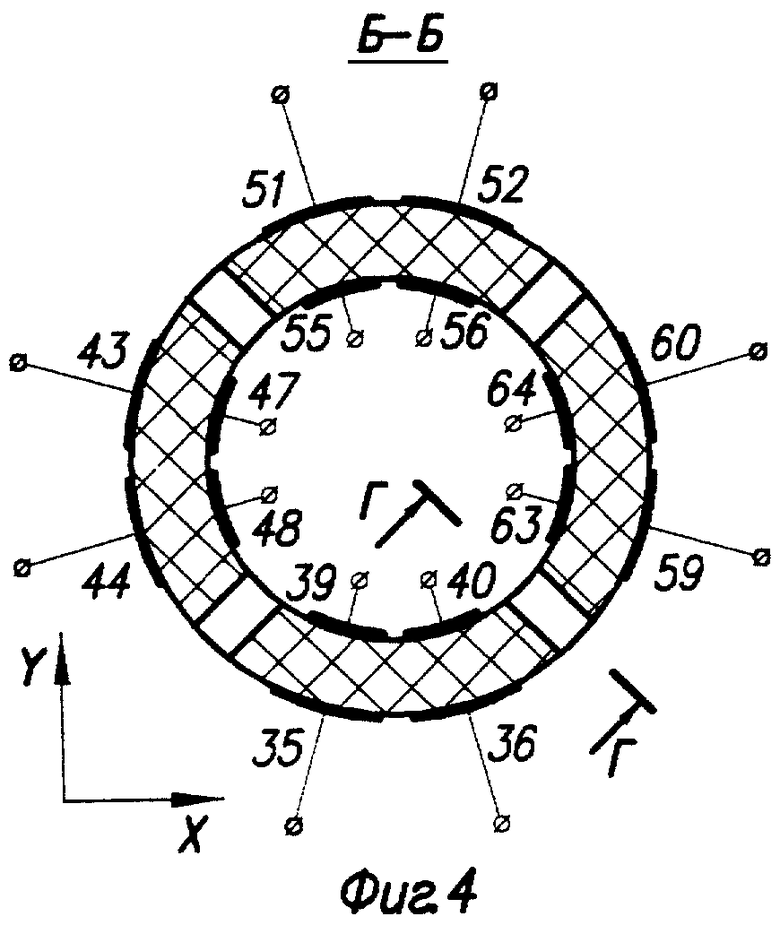
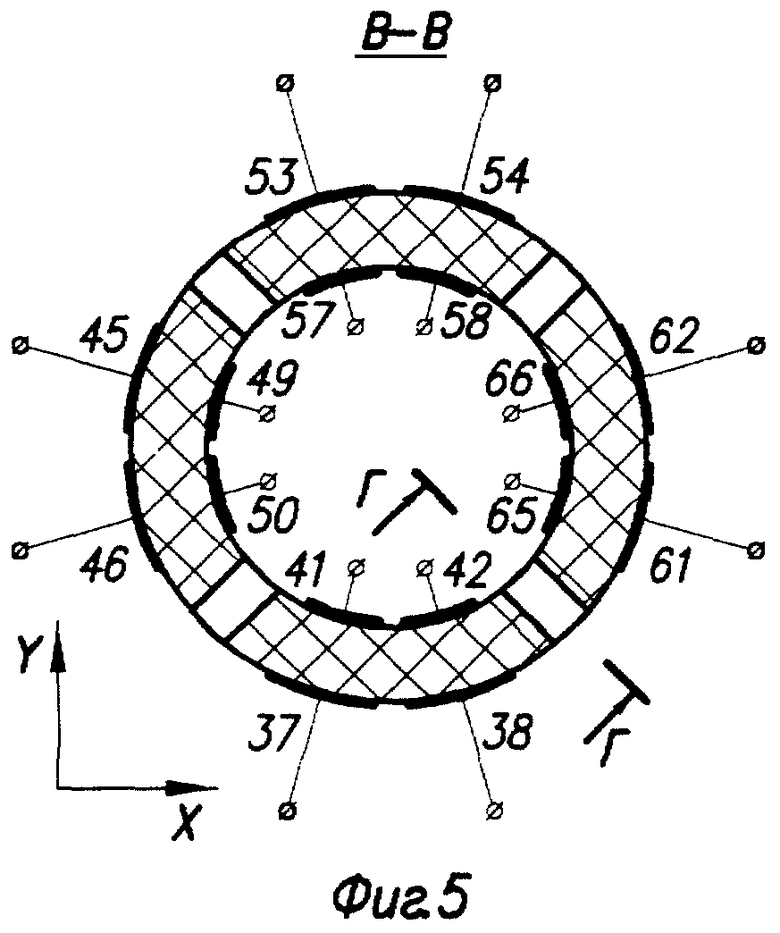
На фиг.4, фиг.5 - два сечения пьезосканера, перпендикулярных продольной оси симметрии пьезотрубки.
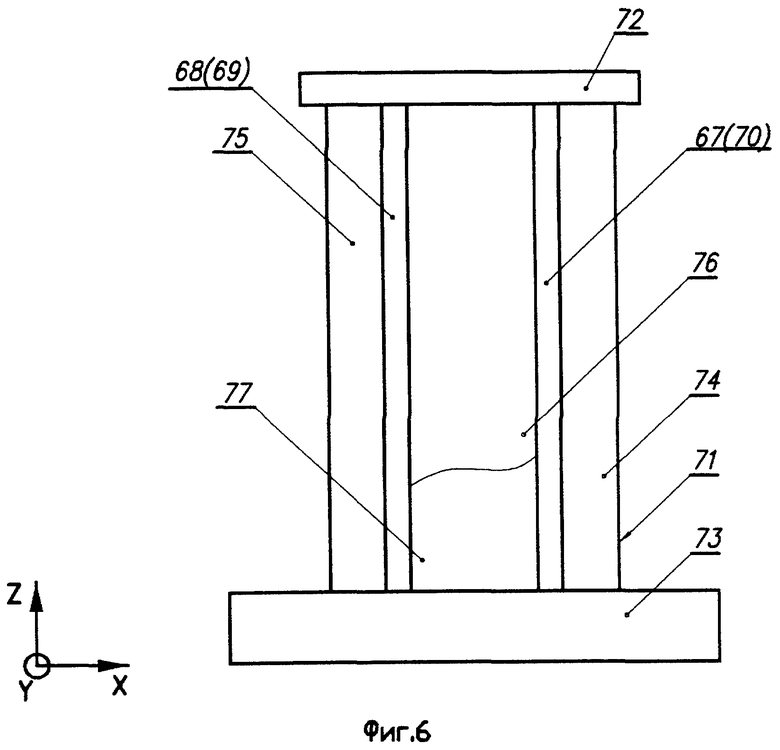
На фиг.6 изображен пьезосканер многофункциональный со сквозными отверстиями на всю длину пьезотрубки.
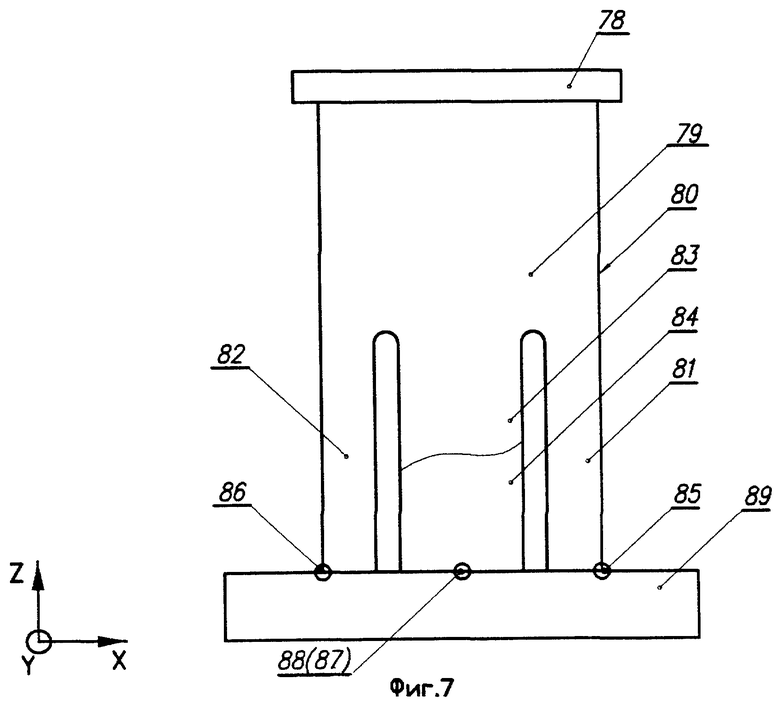
На фиг.7 изображен вариант пьезосканера, в котором держатель объекта закреплен со стороны, противоположной сквозным пазам пьезотрубки.
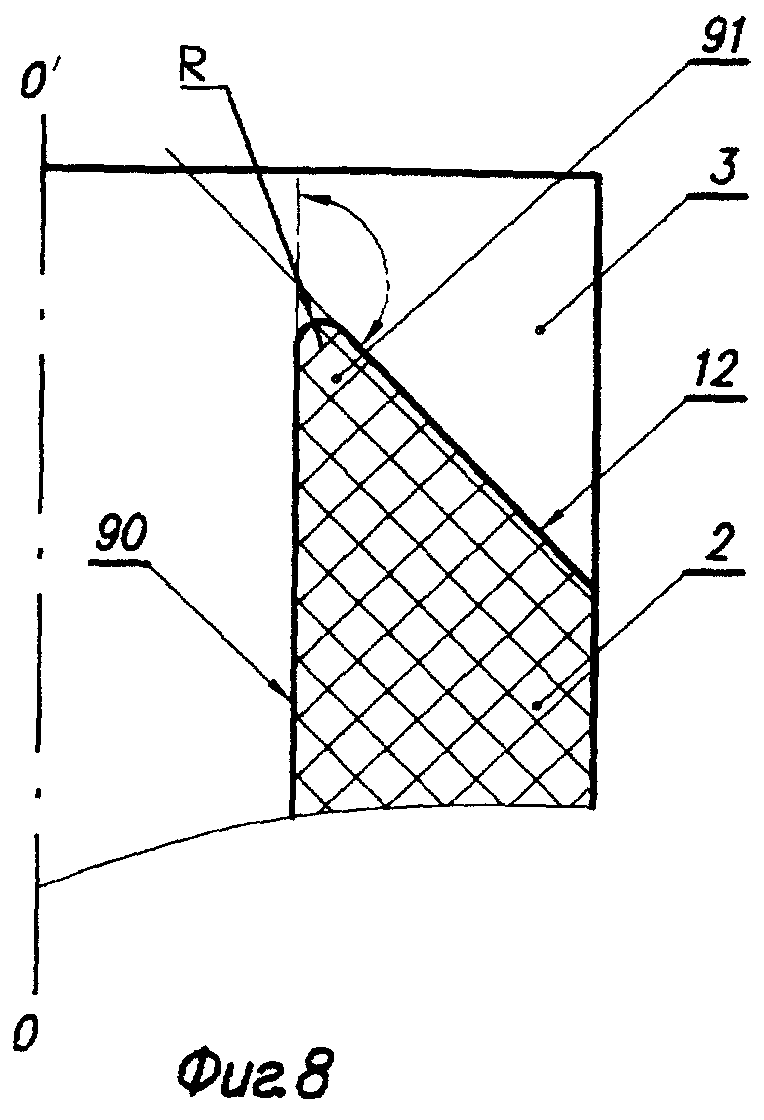
На фиг.8 изображена форма выполнения сквозного паза.
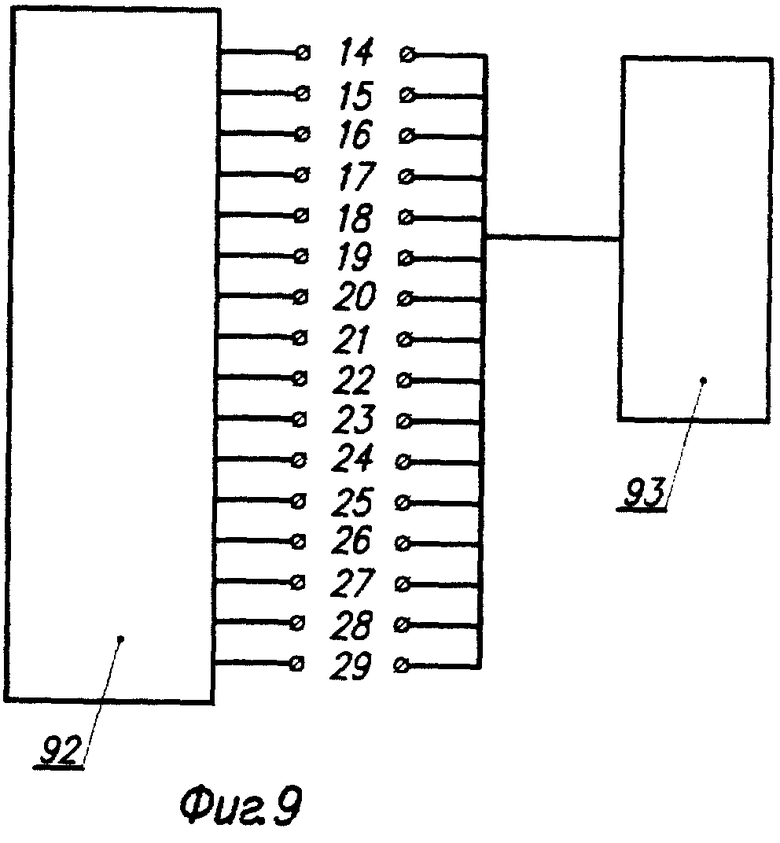
На фиг.9, фиг.10 изображены блок-схемы подключения пьезосканеров, изображенных на фиг.1, фиг.3.
Пьезосканер многофункциональный содержит основание 1 (фиг.1), на котором закреплена пьезотрубка 2 (см., например, [5]), с четырьмя сквозными пазами 3, 4, 5 и 6, выполненными вдоль продольной оси симметрии пьезотрубки 2 О-О’ и образующими четыре фрагмента: первый - 7, второй - 8, третий - 9 и четвертый - 10 (см. также фиг.2). Длина неразрезанной части 11 пьезотрубки от конца 12 сквозного паза до места ее закрепления на основании 1 определяется ее функциональным назначением. В случае использования неразрезанной части в качестве привода по координате Z (вдоль оси О-О’) ее длина может составлять 25-30% от общей длины пьезотрубки 2. На противоположной стороне от основания пьезотрубки 2 установлен держатель объекта 13. На каждом фрагменте пьезотрубки 2 сформированы основные электроды: по два электрода на наружной стороне пьезотрубки 14, 15, 16, 17, 18, 19, 20 и 21 (наружные электроды) и по два электрода на внутренней ее стороне 22, 23, 24, 25, 26, 27, 28 и 29 (внутренние электроды). Причем внутренние электроды расположены напротив наружных электродов. Каждый электрод при этом имеет форму прямоугольной полоски на цилиндрической поверхности пьезотрубки и самостоятельный электрический вывод.
Возможен вариант, в котором на каждом фрагменте 30, 31, 32 и 33 (фиг.3) пьезотрубки 34 дополнительно к основным электродам: двум наружным и двум внутренним, расположенным ближе к основанию 1 (первые две пары), сформированы дополнительные электроды, два наружных и два внутренних расположены (вторые две пары) ближе к держателю объекта 13. При этом внутренние электроды расположены также напротив наружных электродов и имеют форму прямоугольных полосок на цилиндрической поверхности пьезотрубки.
На фрагменте 32 выполнены четыре наружных электрода 35, 36, 37 и 38 и четыре внутренних электрода 39, 40, 41 и 42 (см. также фиг.4, фиг.5).
На фрагменте 31 выполнены четыре наружных электрода 43, 44, 45 и 46 и четыре внутренних электрода 47, 48, 49 и 50.
На фрагменте 33 выполнены четыре наружных электрода 51, 52, 53 и 54 и четыре внутренних электрода 55, 56, 57 и 58.
На фрагменте 30 выполнены четыре наружных электрода 59, 60, 61 и 62 и четыре внутренних электрода 63, 64, 65 и 66.
В этом случае каждый электрод также имеет самостоятельный вывод.
Существует вариант, в котором сквозные пазы 67, 68, 69 и 70 (фиг.6) выполнены на всю длину пьезотрубки 71. При этом держатель объекта 72 и основание 73 выполняют роль соединительных элементов для фрагментов пьезотрубки 74, 75, 76 и 77.
Возможен также вариант, в котором держатель объекта 78 (фиг.7) установлен со стороны неразрезанной части 79 пьезотрубки 80 (со стороны, противоположной пазам), при этом места соединения фрагментов 81, 82, 83 и 84 пьезотрубки 80 выполнены в виде шарниров 85, 86, 87 и 88. В качестве шарниров может быть использовано, например, клеевое соединение, жесткость которого меньше жесткости материала пьезотрубки 80 и жесткости материала основания 89.
При увеличенных амплитудах сканирования целесообразно выполнять конец 12 каждого сквозного паза 3, 4, 5, 6 (см. фиг.1) под углом к оси О-О’, образуя тупой угол α с внутренней поверхностью 90 пьезотрубки 2 (фиг.8). При этом место 91 пьезотрубки 2 в зоне пересечения паза 3 и внутренней ее поверхности скруглено по радиусу R.
Пьезосканер 92, изображенный на фиг.1, фиг.2, подключен к блоку управления 93 (фиг.9).
Пьезосканер 94, изображенный на фиг.3, фиг.4, подключен к блоку управления 95 (фиг.10).
Подробно исполнение блоков управления и подключение их к пьезосканерам см. в [4, 6, 7, 8, 9].
Существует несколько вариантов работы пьезосканера, изображенного на фиг.1, фиг.2.
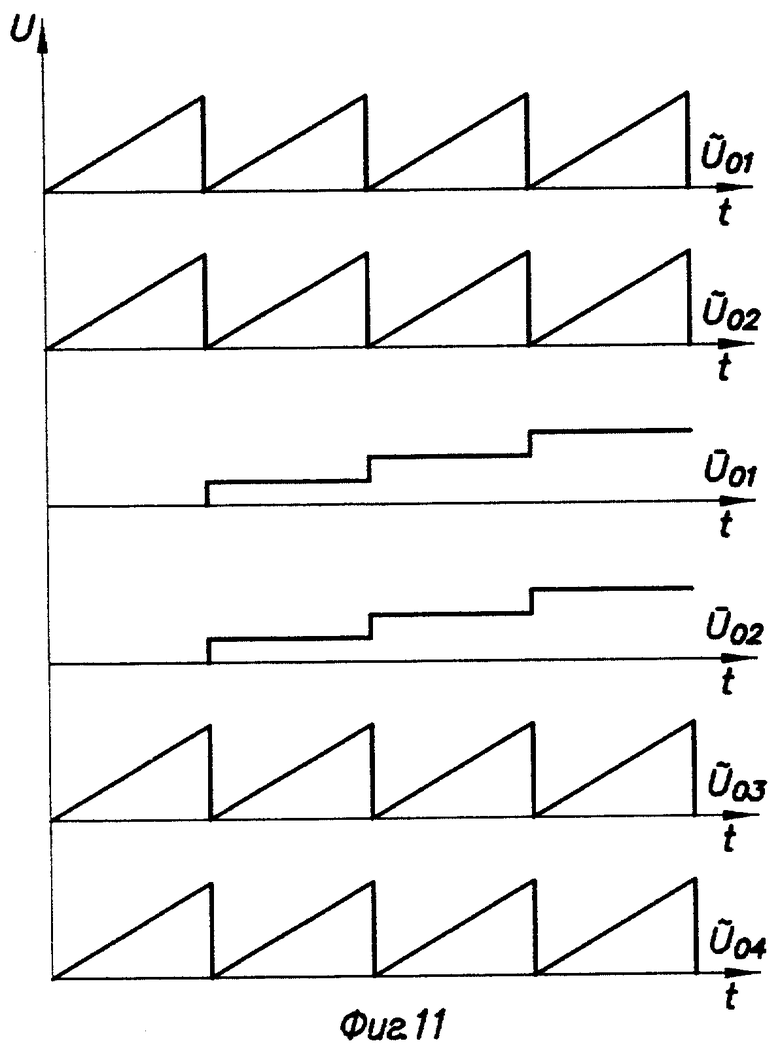
Сканирование по координате Х (первая координата) происходит путем программного прямого объединения электродов 20, 21, 24 и 25, а также 28, 29, 16 и 17 и одновременной подачи на электроды первого 7 и второго 8 фрагментов первого  и второго
и второго  основных пилообразных напряжений, одинаковых по фазе и амплитуде (фиг.11). Следует заметить, что в предложенном устройстве пьезотрубка поляризована от центра к периферии, а следовательно, напряженность поля, возникающая в пьезокерамике, при указанном объединении электродов с учетом центральной симметрии всегда разнонаправлена. При этом за счет попеременного растяжения и сжатия первого 7 и второго 8 фрагментов происходят их синхронные С-образные изгибы и построчное сканирование по координате X. Смещение на строку по координате Y (вторая координата) происходит пошагово, за счет одновременного увеличения первого
основных пилообразных напряжений, одинаковых по фазе и амплитуде (фиг.11). Следует заметить, что в предложенном устройстве пьезотрубка поляризована от центра к периферии, а следовательно, напряженность поля, возникающая в пьезокерамике, при указанном объединении электродов с учетом центральной симметрии всегда разнонаправлена. При этом за счет попеременного растяжения и сжатия первого 7 и второго 8 фрагментов происходят их синхронные С-образные изгибы и построчное сканирование по координате X. Смещение на строку по координате Y (вторая координата) происходит пошагово, за счет одновременного увеличения первого  и второго
и второго  основных постоянных напряжений, одинаковых по фазе и амплитуде, на электродах третьего 9 и четвертого 10 противоположных фрагментов после каждой подачи первого пилообразного напряжения, то есть за счет увеличения разности потенциалов между программно прямо объединенными электродами 14, 15, 26 и 27, а также электродами 22, 23, 18 и 19 (указанный режим описан в [4, 6, 7, 8, 9]). Вместе с этим при сканировании по координате Х возможно дополнительное включение фрагментов 9 и 10 в режиме биморфов. При этом осуществляют дополнительное программное перекрестное объединение наружных и внутренних электродов третьего фрагмента 9: 15-го с 22-м, 14-го с 23, а также объединение наружных и внутренних электродов четвертого фрагмента 10: 18-го с 27, 19-го с 26. После этого на электроды третьего 9 и четвертого 10 фрагментов подают третье
основных постоянных напряжений, одинаковых по фазе и амплитуде, на электродах третьего 9 и четвертого 10 противоположных фрагментов после каждой подачи первого пилообразного напряжения, то есть за счет увеличения разности потенциалов между программно прямо объединенными электродами 14, 15, 26 и 27, а также электродами 22, 23, 18 и 19 (указанный режим описан в [4, 6, 7, 8, 9]). Вместе с этим при сканировании по координате Х возможно дополнительное включение фрагментов 9 и 10 в режиме биморфов. При этом осуществляют дополнительное программное перекрестное объединение наружных и внутренних электродов третьего фрагмента 9: 15-го с 22-м, 14-го с 23, а также объединение наружных и внутренних электродов четвертого фрагмента 10: 18-го с 27, 19-го с 26. После этого на электроды третьего 9 и четвертого 10 фрагментов подают третье  и четвертое
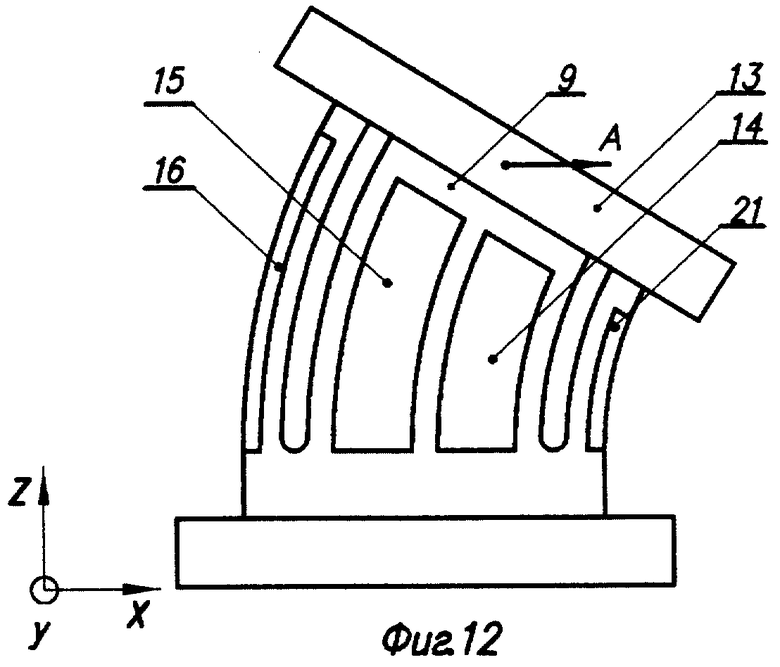
и четвертое  основные пилообразные напряжения одновременно с первым и вторым пилообразными напряжения. В результате разнозначных деформаций краев фрагментов происходят С-образные изгибы третьего 9 и четвертого 10 (фиг.12) фрагментов по первой координате, способствующие основному перемещению А. Если третье
основные пилообразные напряжения одновременно с первым и вторым пилообразными напряжения. В результате разнозначных деформаций краев фрагментов происходят С-образные изгибы третьего 9 и четвертого 10 (фиг.12) фрагментов по первой координате, способствующие основному перемещению А. Если третье  и четвертое
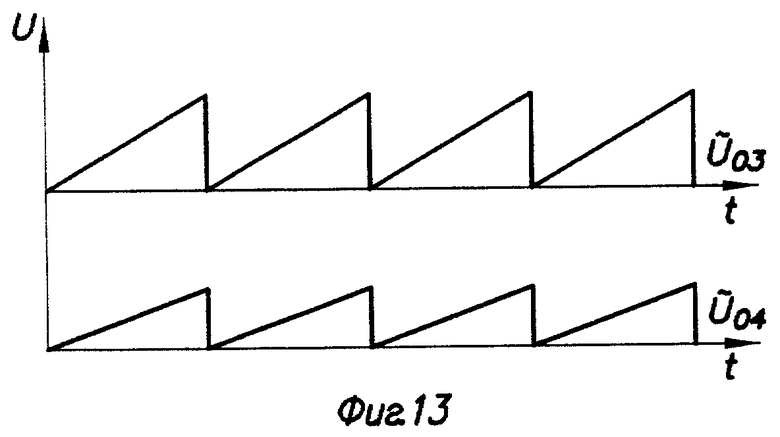
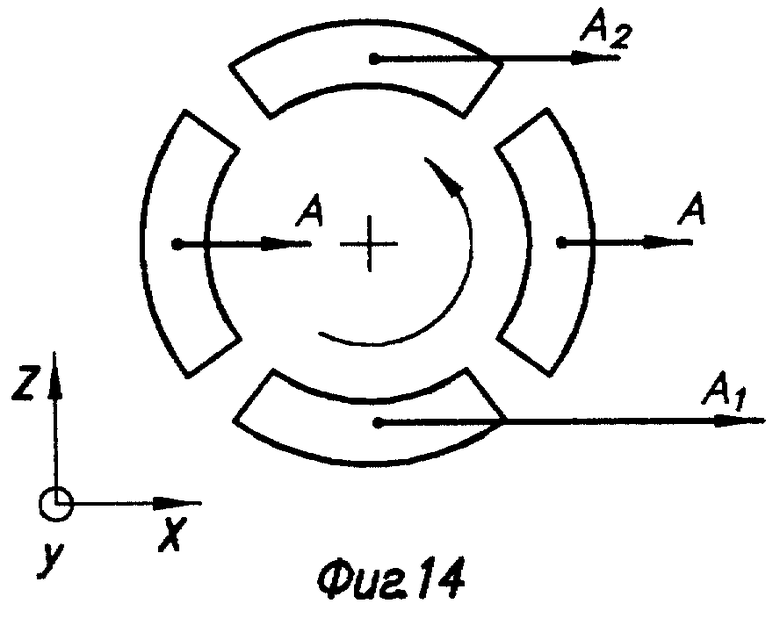
и четвертое  основные пилообразные напряжения (фиг.13) отличны друг от друга по амплитуде, фрагменты 9 и 10 изгибаются на величину А1 и А2 (фиг.14) и возможно осуществлять разворот держателя объекта 13 вокруг оси О-О’, определяемый разностью A1-А2.
основные пилообразные напряжения (фиг.13) отличны друг от друга по амплитуде, фрагменты 9 и 10 изгибаются на величину А1 и А2 (фиг.14) и возможно осуществлять разворот держателя объекта 13 вокруг оси О-О’, определяемый разностью A1-А2.
Описанный принцип сканирования целесообразен при сканировании зондом (зондами). В этом случае в качестве объекта выступает зонд (зонды).
Пьезосканер многофункциональный, изображенный на фиг.3, фиг.4, фиг.5, целесообразно использовать при сканировании образцом. В этом случае при сканировании по координате X на основные и дополнительные электроды первого 30 и второго 31 фрагментов одновременно с подачей первого  и второго
и второго  основных пилообразных напряжений подают дополнительные первое
основных пилообразных напряжений подают дополнительные первое  и второе
и второе  пилообразные напряжения. Наиболее часто используется вариант сканирования, в котором все пилообразные напряжения одинаковы по амплитуде и фазе. В этом случае возможны прямое программное объединение электродов 45, 46, 47, 48, 65, 66, 59 и 60, а также электродов 49, 50, 43, 44, 61, 62, 63 и 64 и подача на них пилообразного напряжения
пилообразные напряжения. Наиболее часто используется вариант сканирования, в котором все пилообразные напряжения одинаковы по амплитуде и фазе. В этом случае возможны прямое программное объединение электродов 45, 46, 47, 48, 65, 66, 59 и 60, а также электродов 49, 50, 43, 44, 61, 62, 63 и 64 и подача на них пилообразного напряжения  (фиг.15). При этом происходит двойной разнонаправленный С-образный изгиб первого фрагмента 30 (фиг.16) и двойной разнонаправленный С-образный изгиб второго фрагмента 31. Изгиб фрагментов происходит синхронно в одном направлении по координате X, что приводит к плоскопараллельному перемещению держателя объекта 13 по координате Х и обеспечивает строчную развертку для смещения на строку по координате Y. Одновременно пошагово увеличивают первое
(фиг.15). При этом происходит двойной разнонаправленный С-образный изгиб первого фрагмента 30 (фиг.16) и двойной разнонаправленный С-образный изгиб второго фрагмента 31. Изгиб фрагментов происходит синхронно в одном направлении по координате X, что приводит к плоскопараллельному перемещению держателя объекта 13 по координате Х и обеспечивает строчную развертку для смещения на строку по координате Y. Одновременно пошагово увеличивают первое  и второе
и второе  основные постоянные напряжения на основных электродах третьего 32 и четвертого 33 противоположных фрагментов после каждой подачи первого
основные постоянные напряжения на основных электродах третьего 32 и четвертого 33 противоположных фрагментов после каждой подачи первого  и второго
и второго  основных пилообразных напряжений на первый 30 и второй 31 противоположные фрагменты. Кроме этого, осуществляют пошаговое увеличение дополнительных первого
основных пилообразных напряжений на первый 30 и второй 31 противоположные фрагменты. Кроме этого, осуществляют пошаговое увеличение дополнительных первого  и второго
и второго  постоянных напряжений на дополнительных электродах третьего 32 и четвертого 33 фрагментов. При равенстве всех постоянных напряжений возможно программное прямое объединение электродов третьего 32 и четвертого 33 фрагментов, аналогичное объединению электродов на фрагментах 30 и 31. При этом объединяются электроды 39, 40, 51, 52, 37, 38, 57 и 58, а также 35, 36, 55, 56, 41, 42, 53 и 54 и осуществляется подача на них пошагово постоянного напряжения
постоянных напряжений на дополнительных электродах третьего 32 и четвертого 33 фрагментов. При равенстве всех постоянных напряжений возможно программное прямое объединение электродов третьего 32 и четвертого 33 фрагментов, аналогичное объединению электродов на фрагментах 30 и 31. При этом объединяются электроды 39, 40, 51, 52, 37, 38, 57 и 58, а также 35, 36, 55, 56, 41, 42, 53 и 54 и осуществляется подача на них пошагово постоянного напряжения  . В результате осуществляется двойной разнонаправленный С-образный изгиб третьего фрагмента 32 и двойной разнонаправленный изгиб четвертого фрагмента 33. При этом изгибы фрагментов 32 и 33 синхронны в одном направлении по координате Y, что приводит к плоскопараллельному перемещению держателя объекта 13 по координате Y и смещению на следующую строку. Кроме этого, при сканировании по координате X возможно дополнительное включение фрагментов 32 и 33 в режиме биморфов. В этом случае на основные электроды третьего 32 и четвертого 33 фрагментов одновременно подают третье и четвертое пилообразные напряжения, а на дополнительные электроды подают дополнительные третье и четвертое пилообразные напряжения. При равенстве пилообразных напряжений, подаваемых на каждый фрагмент, на фрагменте 32 программно объединяют перекрестные электроды 37, 36, 39, 42, а также 35, 38, 40, 41 и подают на них дополнительно пилообразное напряжение
. В результате осуществляется двойной разнонаправленный С-образный изгиб третьего фрагмента 32 и двойной разнонаправленный изгиб четвертого фрагмента 33. При этом изгибы фрагментов 32 и 33 синхронны в одном направлении по координате Y, что приводит к плоскопараллельному перемещению держателя объекта 13 по координате Y и смещению на следующую строку. Кроме этого, при сканировании по координате X возможно дополнительное включение фрагментов 32 и 33 в режиме биморфов. В этом случае на основные электроды третьего 32 и четвертого 33 фрагментов одновременно подают третье и четвертое пилообразные напряжения, а на дополнительные электроды подают дополнительные третье и четвертое пилообразные напряжения. При равенстве пилообразных напряжений, подаваемых на каждый фрагмент, на фрагменте 32 программно объединяют перекрестные электроды 37, 36, 39, 42, а также 35, 38, 40, 41 и подают на них дополнительно пилообразное напряжение  одновременно с подачей
одновременно с подачей  . На фрагменте 33 программно перекрестно объединяют электроды 51, 54, 57, 56 и 55, 58, 53, 52 и подают на них дополнительно пилообразное напряжение
. На фрагменте 33 программно перекрестно объединяют электроды 51, 54, 57, 56 и 55, 58, 53, 52 и подают на них дополнительно пилообразное напряжение  также одновременно с подачей
также одновременно с подачей  . При равенстве
. При равенстве  =
= осуществляется двойной разнонаправленный С-образный изгиб третьего фрагмента 32 (фиг.16) и двойной разнонаправленный изгиб четвертого фрагмента 33. Изгибы обоих фрагментов происходят синхронно по первой (X) координате и также производят плоскопараллельное перемещение держателя объекта 13, способствуя основному перемещению В. При
осуществляется двойной разнонаправленный С-образный изгиб третьего фрагмента 32 (фиг.16) и двойной разнонаправленный изгиб четвертого фрагмента 33. Изгибы обоих фрагментов происходят синхронно по первой (X) координате и также производят плоскопараллельное перемещение держателя объекта 13, способствуя основному перемещению В. При  >
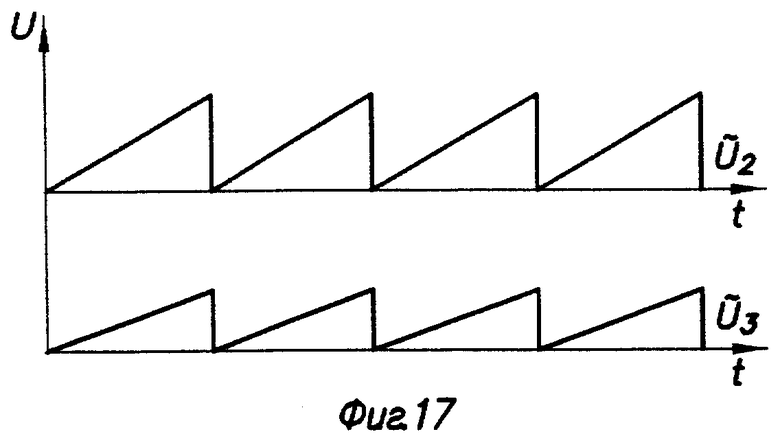
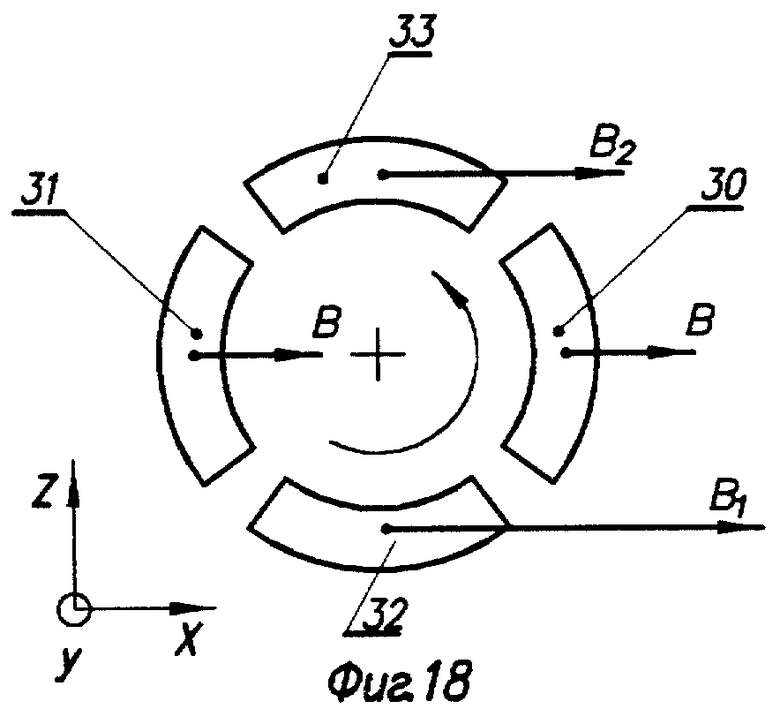
>  (фиг.17) осуществляются двойной разнонаправленный С-образный изгиб третьего фрагмента 32 на величину B1 и двойной разнонаправленный изгиб четвертого фрагмента 33 на величину В2 также по координате X, что дополнительно приводит к развороту держателя объекта 13 вокруг оси симметрии пьезотрубки согласно разности B1-В2 с сохранением его плоскопараллельного перемещения (фиг.18).
(фиг.17) осуществляются двойной разнонаправленный С-образный изгиб третьего фрагмента 32 на величину B1 и двойной разнонаправленный изгиб четвертого фрагмента 33 на величину В2 также по координате X, что дополнительно приводит к развороту держателя объекта 13 вокруг оси симметрии пьезотрубки согласно разности B1-В2 с сохранением его плоскопараллельного перемещения (фиг.18).
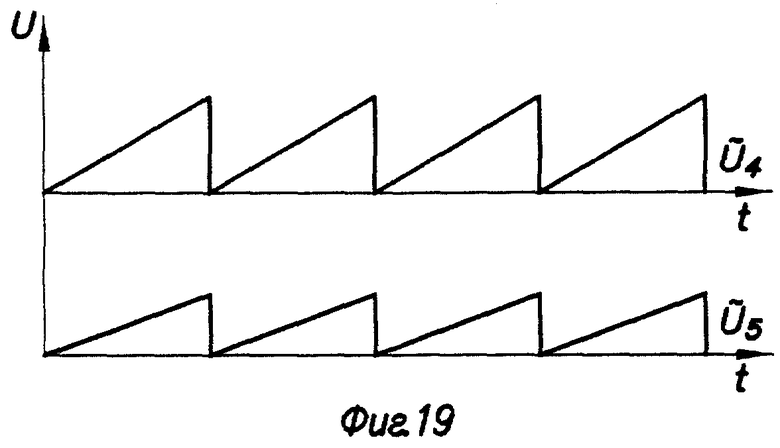
Возможен также вариант, в котором на электроды первого 30 и второго 31 фрагментов подают первое  и второе
и второе  (фиг.19) пилообразные напряжения, различные по амплитуде.
(фиг.19) пилообразные напряжения, различные по амплитуде.
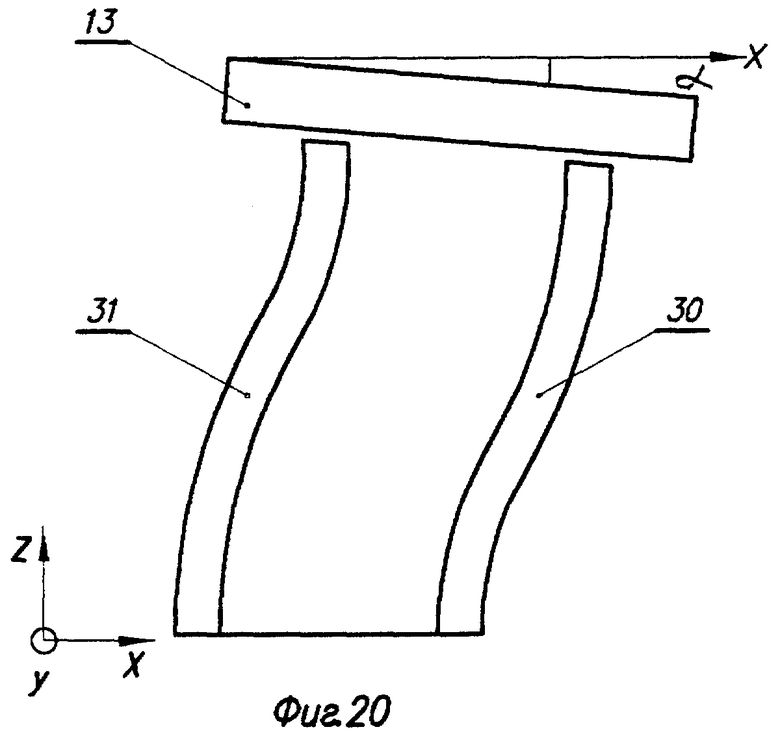
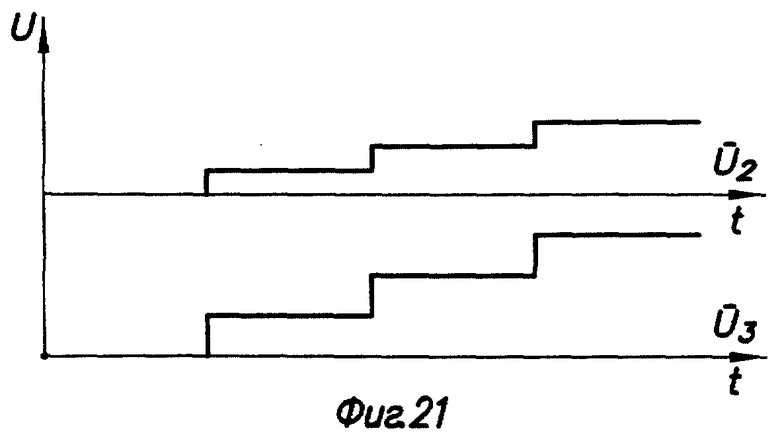
При этом на фрагменте 30 программно прямо объединяют электроды 61, 62, 63, 64 и 59, 60, 65, 66, а на фрагменте 31 программно прямо объединяют электроды 45, 46, 47 и 48, а также 49, 50, 43 и 44. В этом случае каждый фрагмент осуществляет двойной разнонаправленный С-образный изгиб различной величины по первой координате и коррекцию угла α (фиг.20) наклона плоскости держателя объекта 13 по первой координате. На фрагменте 32 при этом программно прямо объединяют электроды 39, 40, 37 и 38, а также 35, 36, 41 и 42, а на фрагменте 33 - 55, 56, 53 и 54, а также 51, 52, 57 и 58 (фиг.21). После этого на этих фрагментах осуществляют пошаговое увеличение первого  и второго
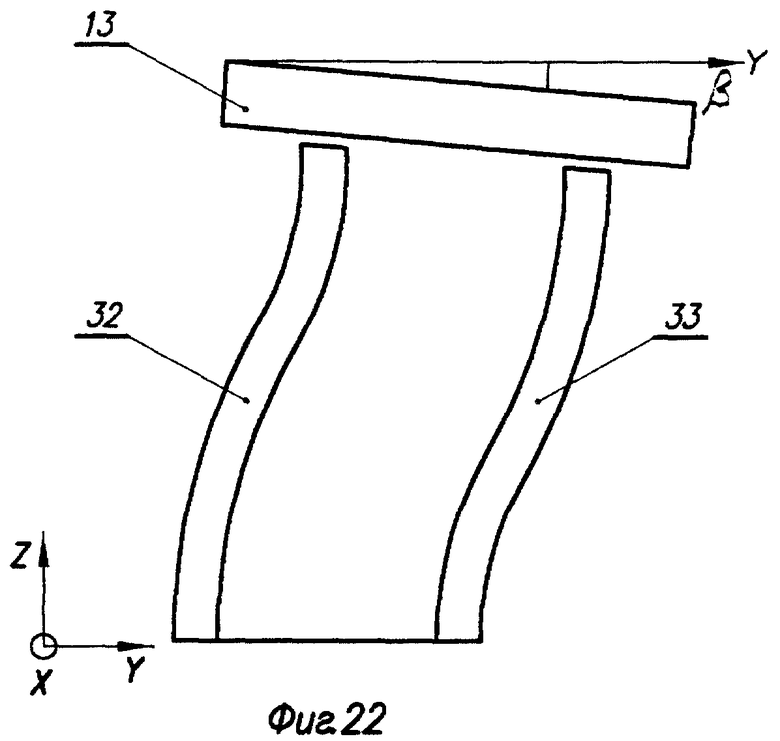
и второго  постоянных напряжений, разных по величине, и производят двойные разнонаправленные изгибы различной величины по второй координате (Y) и коррекцию угла наклона β по этой координате (фиг.22).
постоянных напряжений, разных по величине, и производят двойные разнонаправленные изгибы различной величины по второй координате (Y) и коррекцию угла наклона β по этой координате (фиг.22).
Функционирование пьезосканера, изображенного на фиг.6, осуществляется аналогично предыдущему варианту.
Использование пьезосканера с установкой держателя объекта 78 как показано на фиг.7 целесообразно при незначительной массе держателя объекта 78.
Выбор шарниров 85, 86, 87 и 88 в каждом конкретном случае, с одной стороны, уменьшая жесткость соединения, приводит к увеличению амплитуды перемещения. С другой стороны, изменение резонансной частоты пьезосканера не должно приводить к снижению разрешения СЗМ.
Следует заметить, что шарниры могут применяться также на пьезосканерах, изображенных на фиг.1-фиг.6 со стороны пазов.
Величину угла α (фиг.8) выбирают в зависимости от диапазона перемещения, толщины пьезотрубки и ее диаметра. При перемещении до 10 мкм, толщине пьезотубки ~0.5 мм и ее наружном диаметре 10 мм в предложенном пьезосканере угол α составлял величину 130°. При этом не наблюдалось возникновение микротрещин.
Более подробно работу пьезосканера в составе СЗМ (фиг.9, фиг.10) см. в [7, 8, 9].
Выполнение на пьезотрубке четырех сквозных пазов с образованием фрагментов пьезотрубки с четырьмя электродами на каждом, имеющих индивидуальные выводы, позволяет увеличить диапазон сканирования по осям X, Y с одновременной корректировкой по углу вокруг оси O-O’ положения держателя объекта.
Выполнение на каждом фрагменте пьезотрубки по восемь электродов позволяет производить сканирование по осям X, Y с сохранением параллельности перемещения плоскости держателя объекта.
Выполнение сквозных пазов на всю длину пьезотрубки дополнительно увеличивает диапазон перемещений. Вместе с этим в этом случае исключается возможность появления трещин на концах пазов.
Соединение держателя объекта с пьезотрубкой со стороны, противоположной сквозным пазам, увеличивает диапазон сканирования.
Соединение держателя объекта с пьезотрубкой со стороны сквозных пазов, по сравнению с предыдущим вариантом, более надежный вариант пьезосканера.
Выполнение мест соединения фрагментов пьезотрубки с держателем объекта или основанием в виде шарниров позволяет дополнительно увеличивать диапазон перемещения за счет уменьшения реакции со стороны не работающих по данной координате электродов.
Выполнение концов сквозных пазов под тупым углом к внутренней поверхности пьезотрубки, а также округление зоны пересечения пазов и внутренней поверхности пьезотрубки уменьшает вероятность получения призм и повышает надежность пьезосканера. Это происходит благодаря тому, что при сканировании наружная поверхность пьезосканера испытывает большие нагрузки по сравнению с внутренней.
Подача третьего и четвертого основных пилообразных напряжений на перекрестно объединенные электроды третьего и четвертого фрагментов включает их в режим перемещения по первой координате, что увеличивает диапазон этого перемещения.
Использование третьего и четвертого основных пилообразных напряжений, различных по амплитуде, позволяет дополнительно осуществлять разворот держателя объекта, что расширяет функциональные возможности способа сканирования.
Использование дополнительных первого и второго пилообразных напряжений, а также пошаговое увеличение дополнительных первого и второго постоянных напряжений позволяет осуществлять плоскопараллельное сканирование по двум координатам, что также расширяет функциональные возможности способа сканирования.
Использование дополнительных третьего и четвертого пилообразных напряжений увеличивает диапазон сканирования.
Использование дополнительных третьего и четвертого пилообразных напряжений, отличных друг от друга по амплитуде, позволяет осуществлять разворот держателя объекта с сохранением его плоскопараллельного перемещения, что расширяет функциональные возможности способа сканирования.
Использование первого и второго пилообразных напряжений, а также первого и второго постоянных напряжений, разных по амплитуде, позволяет осуществлять коррекцию плоскости держателя объекта в процессе сканирования, что также расширяет функциональные возможности способа сканирования.
ЛИТЕРАТУРА
1. Патент США №4945235, H 01 J 37/00, 1990 г.
2. Рекламный проспект V/О ELECTRONINTORG, пьезоприводы ППУ 9 - ППУ 14.
3. Патент US 5200617, G 01 N 23/00, 1993.
4. Быков В.А. Приборы и методы сканирующей зондовой микроскопии для исследования и модификации поверхностей. УДК 539.216. М., 2000. с.178.
5. Пьезоэлектрическая керамика, Е.Г.Смажевская и др., “Советское радио”, 1971 г., 198 с.
6. The use of a linear piezoelectric actuator for coarse motion in a vacuum compatible scanning tunneling microscope, Gary W. Stupian and Martin S. Leung, J. Vac. Sci. Technol. A 7 (4), Jul/Aug 1989.
7. Зондовая микроскопия для биологии и медицины. В.А.Быков и др., Сенсорные системы, т.12, №1, 1998 г., с.99-121.
8. Tunneling barrier height imaging and polycrystalline Si surface observations, S. Hosaka, K. Sagara, T. Hasegawa, K. Takata and S. Hosoki, Vac. Sci. Technol. A 8 (1), Jan/Feb 1990.
9. Scanning tunneling microscope instrumentation, Y. Kuk, P.J. Sulverman, Rev. Sci. Instrum. 60 (1989), No. 2, 165-180.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКАНИРОВАНИЯ ПОВЕРХНОСТИ ОБЪЕКТА С ПОМОЩЬЮ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2013 |
|
RU2538416C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2006 |
|
RU2366008C2 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| ПЬЕЗОСКАНЕР С ТРЕХКООРДИНАТНЫМ ПЛОСКОПАРАЛЛЕЛЬНЫМ ПЕРЕМЕЩЕНИЕМ В ПЛОСКОСТИ ОБЪЕКТА | 2002 |
|
RU2227363C1 |
| ПЬЕЗОСКАНЕР | 2001 |
|
RU2199171C2 |
| СПОСОБ СКАНИРОВАНИЯ ОБЪЕКТОВ С ПОМОЩЬЮ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2004 |
|
RU2282902C2 |
| УСТРОЙСТВО МИКРОПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2272350C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2004 |
|
RU2257645C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ НАНОТОМОГРАФ С МОДУЛЕМ ОПТИЧЕСКОГО АНАЛИЗА | 2016 |
|
RU2645437C1 |



Изобретение относится к сканирующей зондовой микроскопии. Пьезосканер содержит основание, на котором закреплена пьезотрубка со сквозными пазами, выполненными вдоль продольной оси симметрии пьезотрубки и образующими четыре фрагмента. На каждом фрагменте пьезотрубки сформированы основные электроды. Внутренние электроды расположены напротив наружных электродов. На противоположной стороне от основания пьезотрубки установлен держатель объекта. Электроды объединяют программно. Подают пилообразные напряжения на электроды. Осуществляют их С-образные изгибы. Осуществляют сканирование. Технический результат - увеличение диапазона сканирования, расширение функциональных возможностей пьезосканера и способа сканирования в зондовой микроскопии. 2 с. и 12 з.п. ф-лы, 22 ил.
| ПЬЕЗОСКАНЕР | 2001 |
|
RU2199171C2 |
| US 4945235, 31.07.1990 | |||
| Сканирующий туннельный микроскоп | 1990 |
|
SU1797149A1 |
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| Пьезоэлектрическое устройство перемещения | 1987 |
|
SU1541741A1 |
| US 5200617, 06.04.1993. | |||

