Изобретение относится к нанотехнологии, а более конкретно к устройствам, обеспечивающим микроперемещения по трем координатам. Например, устройство перемещения может быть использовано в качестве сканера в зондовой микроскопии.
Известно устройство перемещения (пьезопривод), содержащее держатель с цилиндрическим пьезоэлементом, на внутренней поверхности которого нанесен сплошной электрод, а на наружной несколько групп электродов [1].
Недостаток указанного устройства заключается в невозможности выбора требуемого диапазона перемещений, что снижает его функциональные возможности.
Известен также пьезопривод, состоящий из набора пьезотрубок одного диаметра с параллельными торцами и сплошными электродами на наружной и внутренней поверхностях, соединенных соосно друг с другом по торцам соединительными элементами и с первым и вторым основанием свободными торцами [2].
Недостаток указанного устройства заключается в отсутствии у указанного привода возможности перемещения в плоскости, перпендикулярной оси пьезотрубок, что сужает его функциональные возможности и не позволяет использовать в качестве пьезосканера в зондовой микроскопии. Второй недостаток заключается в уменьшении резонансной частоты пьезопривода в плоскости, перпендикулярной его продольной оси, что приводит к увеличению амплитуды колебаний и увеличивает погрешность измерений.
Известно также устройство перемещения (пьезосканер) по трем координатам, состоящее из основания с закрепленным на нем одним концом блоком перемещения по одной координате (Z), на другом конце которого посредством соединительного элемента закреплен блок перемещения по двум взаимно-перпендикулярным координатам (X, Y) в плоскости, перпендикулярной координате Z [3].
Недостаток указанного устройства заключается в том, что закрепление блока перемещения по двум взаимно перпендикулярным координатам (X, Y) на соединительном элементе, непосредственно установленным на блоке перемещения по одной координате (Z), увеличивает нефункциональные перемещения по осям X, Y и уменьшает соответственно точность перемещения устройства.
Указанное устройство выбрано в качестве прототипа предложенного решения.
Технический результат изобретения заключается в уменьшении нефункциональных перемещений устройства и повышении его точности.
Указанный результат достигается тем, что в устройстве перемещения, состоящем из основания, с закрепленным на нем одним концом блоком перемещения по одной координате (Z), на другом конце которого посредством соединительного элемента закреплен блок перемещения по двум взаимно-перпендикулярным координатам (X, Y) в плоскости, перпендикулярной координате Z, отличающееся тем, что в него введены направляющие по координате Z, сопряженные с основанием и соединительным элементом по его краям вдоль оси Z, при этом жесткость соединительного элемента по координате Z превышает жесткость блока перемещения по одной координате. Одним из вариантов осуществления изобретения является то, что направляющие по координате Z имеют осевую симметрию. Возможно выполнение направляющих по координате Z в виде упругих элементов. Целесообразно также выполнение упругих элементов как минимум в виде двух плоских пружин, закрепленных по периферии на основании, а центральными частями на соединительном элементе таким образом, что их плоскости перпендикулярны оси Z. Существует вариант, в котором упругие направляющие закреплены шарнирно на основании и соединительном элементе. Возможна установка соединительного элемента с натягом по оси Z относительно основания, превышающим Z перемещение. В случае использования несжимаемых сред целесообразно, как минимум, в двух плоских пружинах выполнять не менее двух отверстий. Существует также вариант, в котором две плоские пружины перфорированы таким образом, что их упругие фрагменты содержат Z-образные элементы, работающие на изгиб.
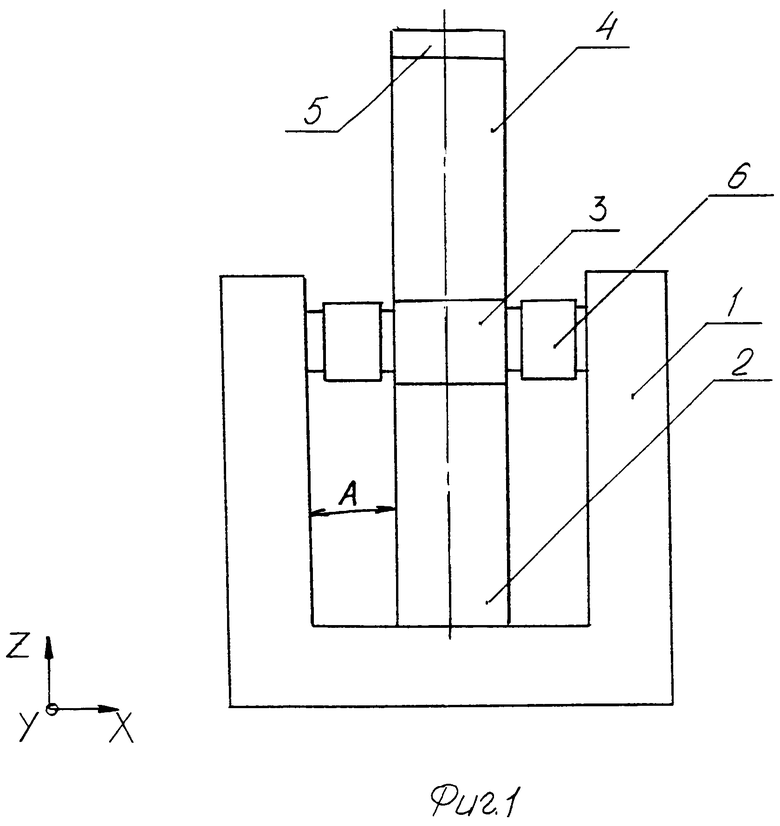
На фиг.1 изображено устройство перемещения с направляющими в общем виде.
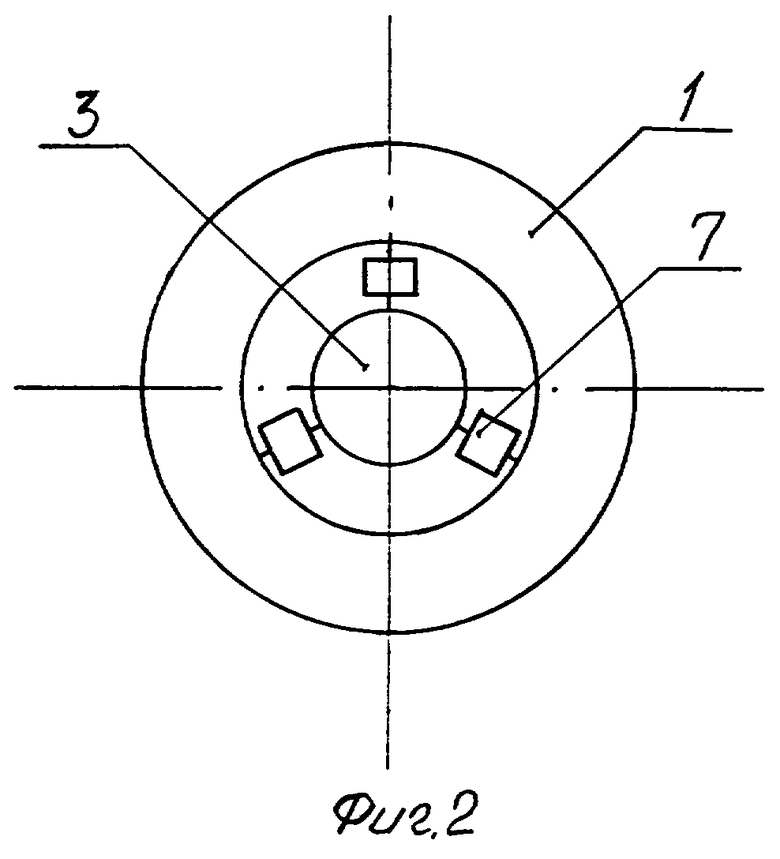
На фиг.2 - вариант направляющих с осевой симметрией.
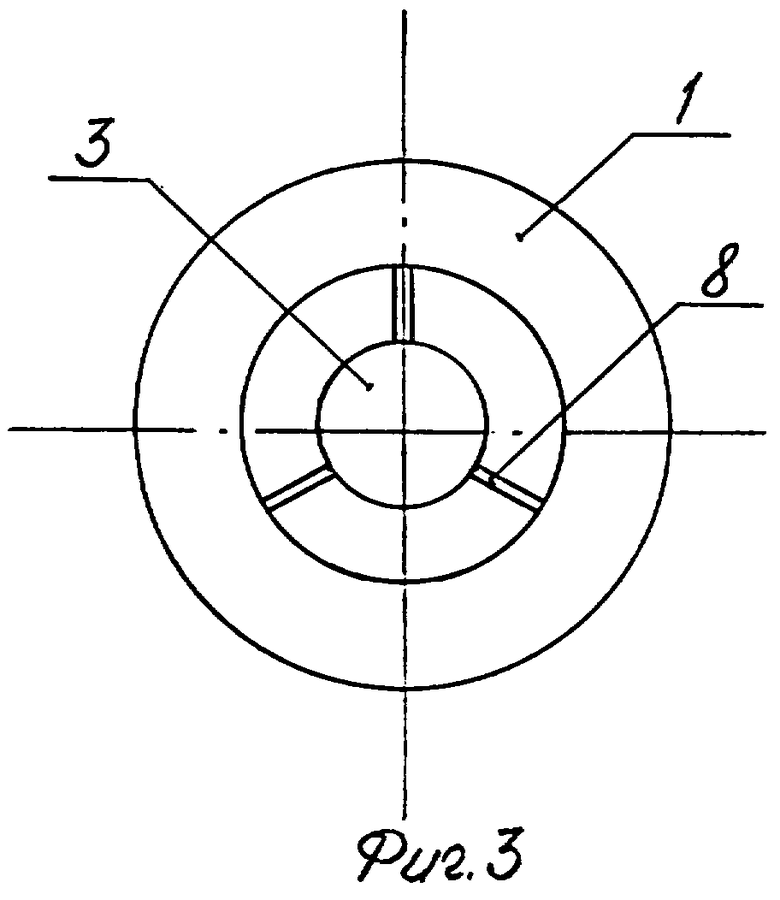
На фиг.3 - вариант направляющих, выполненных в виде упругих элементов.
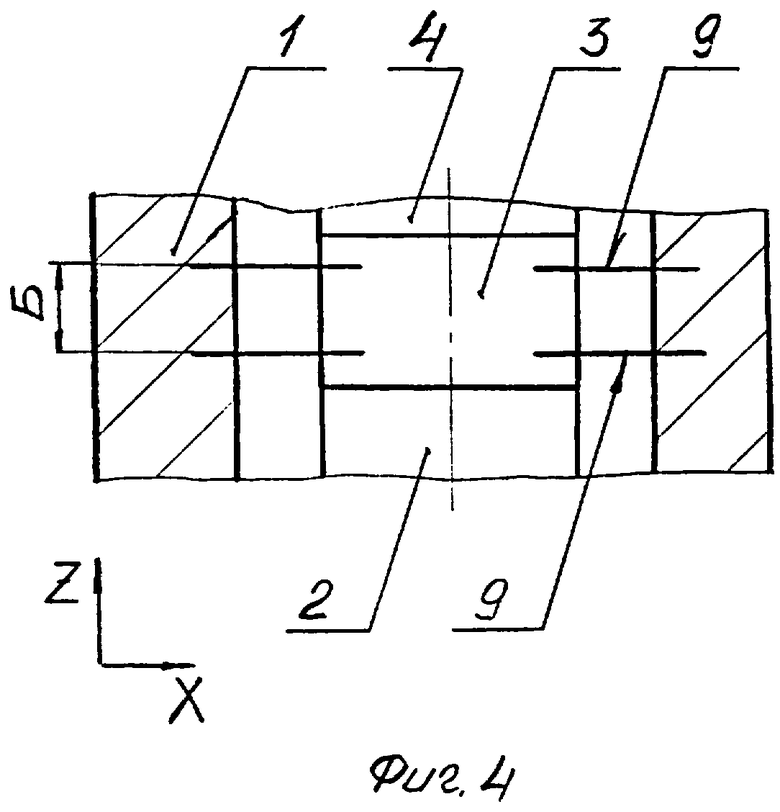
На фиг.4 - направляющие в виде плоских пружин.
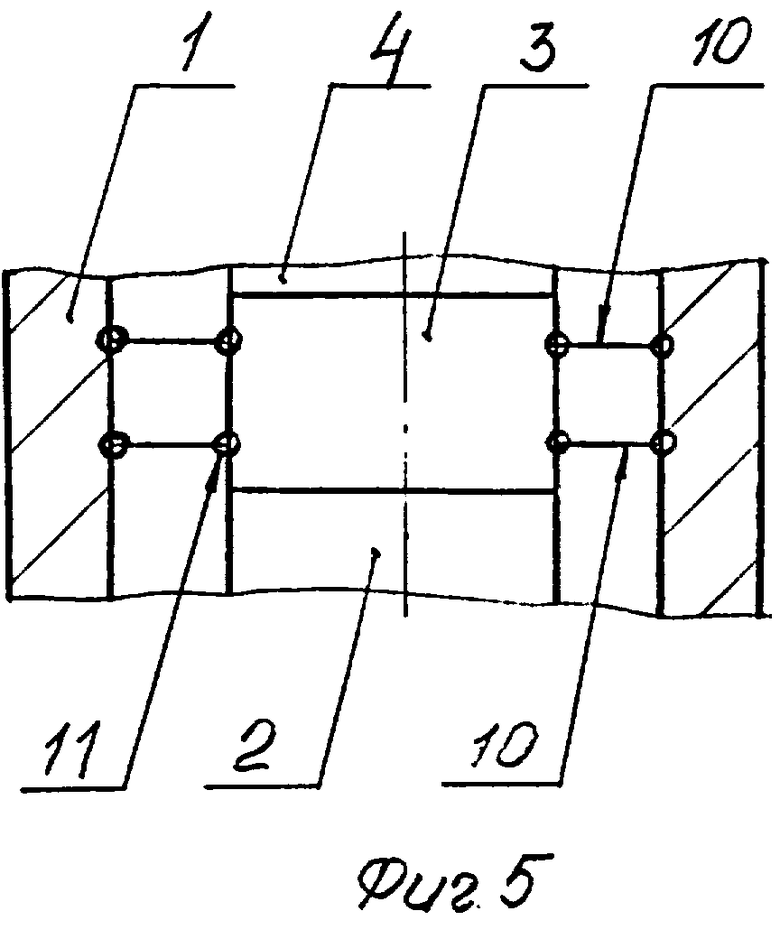
На фиг.5 - шарнирные направляющие.
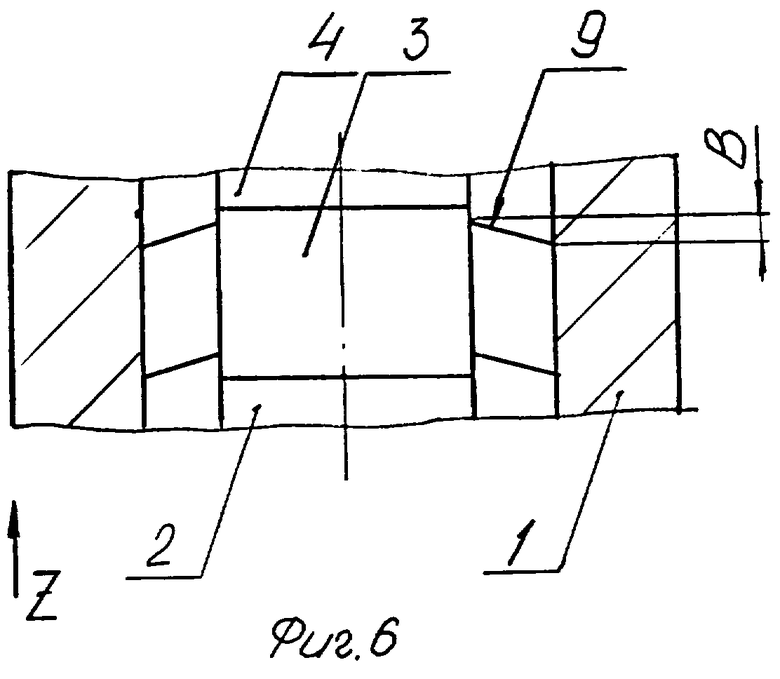
На фиг.6 изображена установка упругих направляющих с натягом.
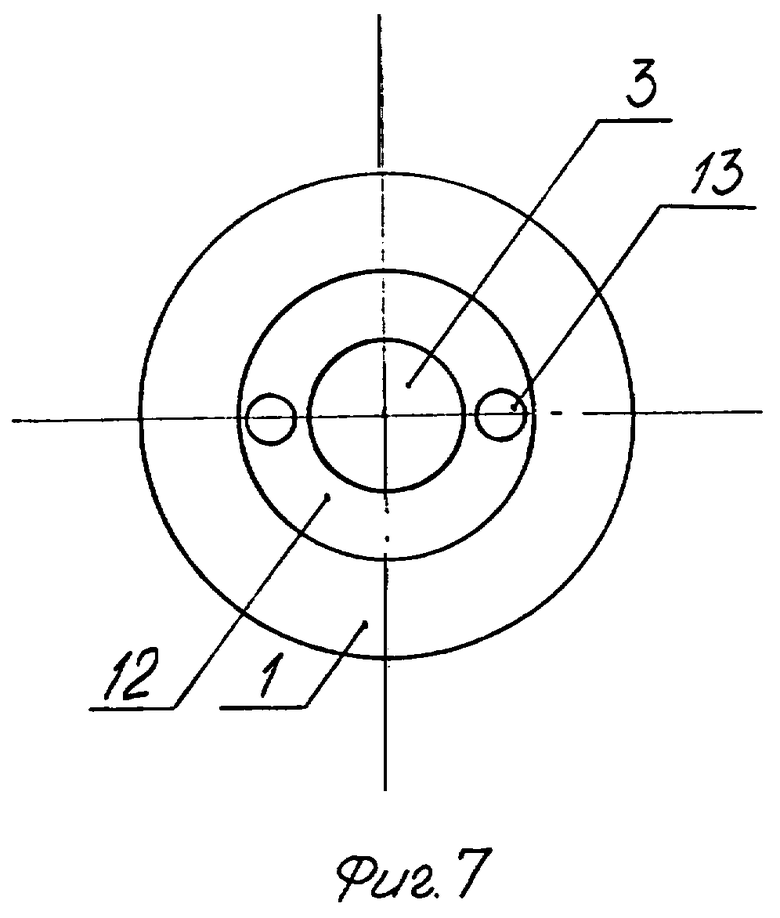
На фиг.7 изображен жидкостной вариант упругих направляющих.
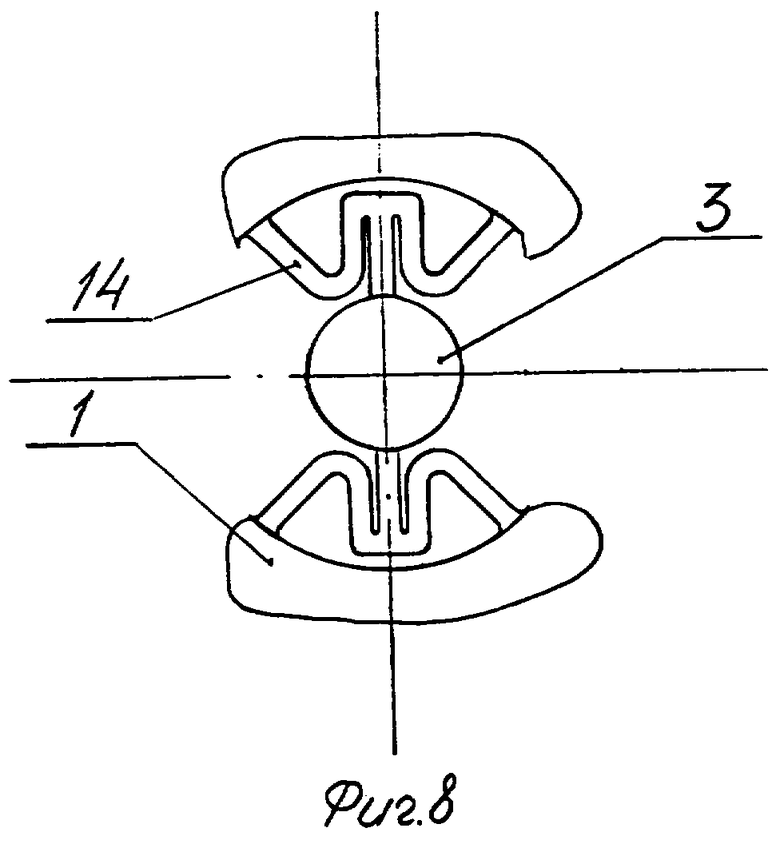
На фиг.8 - вариант Z-образных направляющих.
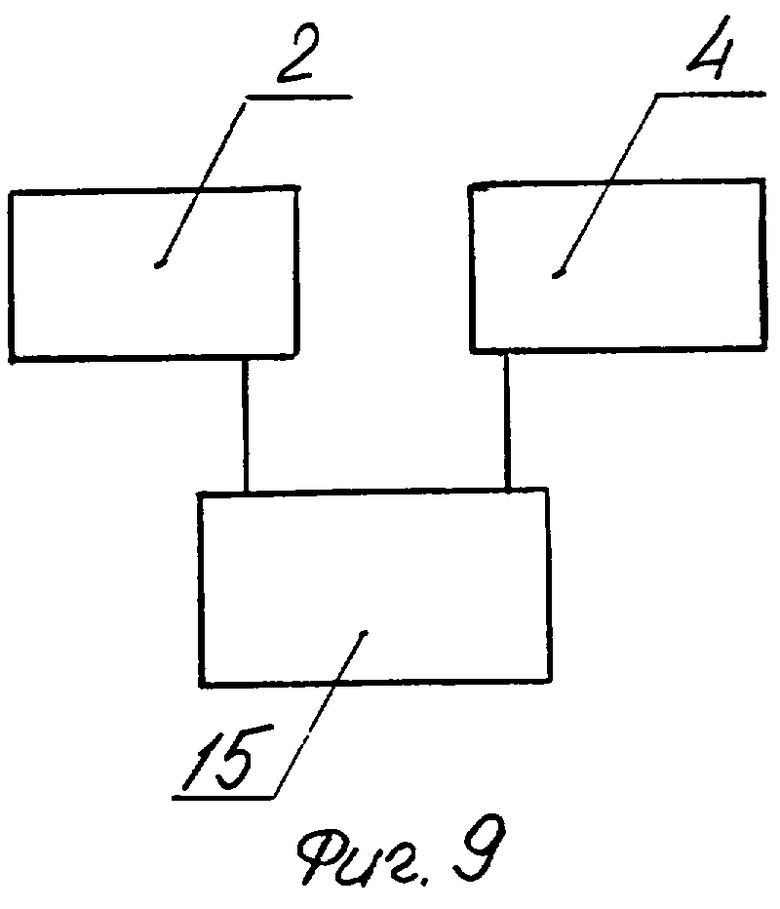
На фиг.9 представлена блок-схема устройства перемещения.
Устройство перемещения содержит основание 1 с закрепленным на нем одним концом блоком перемещения по одной координате (Z) 2, на другом конце которого посредством соединительного элемента 3 закреплен блок перемещения по двум взаимно-перпендикулярным координатам (X, Y) 4 в плоскости, перпендикулярной координате Z. Следует заметить, что блок 2 может состоять из n элементов, соединенных между собой (не показано) и способных изменять свои размеры, например, под действием приложенного напряжения. В частном случае это могут быть пьезокерамические трубки [4, 5]. На конце блока 4 закреплен держатель объекта 5, например образца или зонда, в случае использования устройства перемещения в сканирующем зондовом микроскопе (СЗМ) в качестве пьезосканера. В устройство перемещения введены направляющие 6 по координате Z, сопряженные с основанием 1 и соединительным элементом 3 по его краям по оси Z.
Сопряжение должно быть выполнено на максимально допустимом размерами соединительного элемента расстоянии, что обеспечивает его минимальные нефункциональные перемещения при сканировании за счет увеличения базы приложения сил. Следует заметить, что жесткость соединительного элемента 3 по координате Z должна превышать жесткость блока перемещения 2. Возможен вариант, в котором направляющие по координате Z 7 (фиг.2) имеют осевую симметрию. В случае небольших (1-10 мкм) перемещений по координате Z целесообразно в качестве направляющих по координате Z использовать упругие элементы 8 (фиг.3), выполненные, например, в виде стержней или полосок. Возможен также вариант, где направляющие представляют собой плоские пружины 9 (фиг.4), закрепленные по периферии на основании 1, а центральными частями на соединительном элементе 3 таким образом, что их плоскости перпендикулярны оси Z. В тех случаях, где, например, долговечность работы является определяющим фактором, закрепление упругих направляющих 10 может быть осуществлено с использованием шарниров 11 (фиг.3). При повышенных точностных требованиях с целью уменьшения внутренних люфтов конструкции соединительный элемент 3 (фиг.6) может быть установлен с натягом по оси Z относительно основания 1. Для использования устройства перемещения в несжимаемых средах, например жидкостях, целесообразно выполнять в плоских пружинах 12 (фиг.7) отверстия 13. При относительно больших перемещениях >10 мкм, например, возможен вариант выполнения плоских пружин с Z-образными упругими фрагментами 14, работающими на изгиб.
Для сканеров в СЗМ, где перемещение по координате Z составляет величину порядка 10 мкм, при размере А~10-20 мм и при использовании направляющих из бериллиевой бронзы без перфорации их толщина может быть порядка 0,2 мм. Способ закрепления направляющих в основании 1 и на соединительном элементе 3 не показан. Закрепление может быть осуществлено посредством клея, сварки, пайки, зажима между шайб и т.п. Следует заметить, что чем больше расстояние Б (фиг.4) между точками приложения сил, тем эффективнее их использование. Блоки 2 и 4 подключены к блоку управления 15. Следует заметить, что величина натяга В (фиг.6) должна быть больше величины перемещения элемента 3 по координате Z.
Устройство перемещения работает следующим образом. От блока управления 15 подают сигналы на блоки 2 и 4, осуществляя при этом трехкоординатное перемещение держателя 5. Более подробно с работой предложенного устройства перемещения в качестве пьезосканера в сканирующих зондовых микроскопах можно ознакомиться в [5, 6, 7, 8, 9, 10]. Использование направляющих по координате Z, сопряженных с основанием и соединительным элементом, уменьшает нефункциональные перемещения устройства и повышает соответственно точность перемещения. Сопряжение направляющих по краям соединительного элемента усиливает эффект их использования за счет увеличения базы приложения сил. Выполнение соединительного элемента с жесткостью по координате Z, превышающей жесткость блока перемещения по одной координате, позволяет более эффективно гасить его нефункциональные перемещения по осям X, Y, что также приводит к повышению точности перемещения. Выполнение направляющих с осевой симметрией позволяет более равномерно распределять оставшиеся нефункциональные перемещения по осям X, Y, а также уменьшить влияние термодрейфов. Это особенно важно при использовании привода в зондовой микроскопии. Использование в качестве направляющих упругих элементов позволяет повысить точность перемещения благодаря их простоте и долговечности. Выполнение упругих элементов в виде плоских пружин также повышает точность перемещения за счет уменьшения нефункциональных крутильных перемещений. Плоские пружины можно изготавливать на электроэрозии в виде единого элемента, что повышает точность их изготовления и соответственно точность перемещения. Шарнирное закрепление упругих направляющих позволяет уменьшить на них реакцию опор и повысить их долговечность. Установка соединительного элемента с натягом относительно основания уменьшает внутренние люфты конструкции и повышает точность перемещения. Вместе с этим такая компоновка позволяет исключить эффект хлопка в случае пластических деформаций направляющих при переходе соединительного элемента через центральное положение. Выполнение отверстий в плоских пружинах позволяет уменьшить силовые воздействия несжимаемых сред в случае работы в них устройства перемещения. Использование Z-образных упругих фрагментов, работающих на изгиб, позволяет повысить долговечность в условиях относительно больших (>10 мкм) перемещений.
Источники информации
1. Патент США №4945235, H 01 J 37/00, 1990.
2. Рекламный проспект V/О ELECTRONINTO+RG. Пьезоприводы ППУ-9-ППУ-14.
3. Патент США №5173605, G 01 N 23/00, 1992, фиг.8, 8а.
4. Изделия акустоэлектроники и пьезокерамики. Под ред. Парфенова. Деловой мир, 1992, с.167.
5. Смажевская Е.Г. и др. Пьезоэлектрическая керамика. Советское радио, 1971, с.198.
6. A new ultra-high vacuum scanning tunneling microscope design for surface science studies. G.E. Poirier and J.M.White. Rev. Sci. Instrum. 60 (10), October, 1989.
7. The use of a linear piezoelectric actuator for coarse motion in a vacuum compatible scanning tunneling microscope. Gary W. Stupian and Martin S. Leung, J. Vac. Sci. Technol. A 7 (4), Jul/Aug 1989.
8. Быков В.А. и др. Зондовая микроскопия для биологии и медицины. Сенсорные системы. Т.12, №1, 1998, с.99-121.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| ШИРОКОПОЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2001 |
|
RU2210730C2 |
| ПЬЕЗОСКАНЕР | 2001 |
|
RU2199171C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ НАНОТОМОГРАФ С МОДУЛЕМ ОПТИЧЕСКОГО АНАЛИЗА | 2016 |
|
RU2645437C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| ПЬЕЗОСКАНЕР МНОГОФУНКЦИОНАЛЬНЫЙ И СПОСОБ СКАНИРОВАНИЯ В ЗОНДОВОЙ МИКРОСКОПИИ | 2003 |
|
RU2248628C1 |
| КООРДИНАТНЫЙ СТОЛ | 2003 |
|
RU2255321C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2004 |
|
RU2282258C2 |
Изобретение относится к нанотехнологии, а именно к устройствам, обеспечивающим микроперемещения по трем координатам, например, в качестве сканера в зондовой микроскопии. Изобретение направлено на повышение точности перемещения. Это обеспечивается за счет того, что устройство перемещения состоит из основания с закрепленным на нем одним концом блоком перемещения по одной координате (Z), на другом конце которого посредством соединительного элемента закреплен блок перемещения по двум взаимно-перпендикулярным координатам (X, Y) в плоскости, перпендикулярной координате Z. Устройство перемещения снабжено направляющими по координате Z, которые сопряжены с основанием и соединительным элементом по его краям вдоль оси Z, при этом жесткость соединительного элемента по координате Z превышает жесткость блока перемещения по одной координате. Возможно, чтобы направляющие по координате Z имели осевую симметрию. Возможно выполнение направляющих по координате Z в виде упругих элементов. Целесообразно также выполнение упругих элементов, как минимум, в виде двух плоских пружин, закрепленных по периферии на основании, а центральными частями на соединительном элементе таким образом, чтобы их плоскости были перпендикулярны оси Z. Возможно, чтобы упругие направляющие были закреплены шарнирно на основании и соединительном элементе. Возможна установка соединительного элемента с натягом по оси Z относительно основания, превышающим Z перемещение. В случае использования несжимаемых сред целесообразно, как минимум, в двух плоских пружинах выполнять не менее двух отверстий. Существует также вариант, в котором две плоские пружины перфорированы таким образом, что их упругие фрагменты содержат Z-образные элементы, работающие на изгиб. 7 з.п.ф-лы, 9 ил.
| US 5173605 А, 22.12.1992 | |||
| Трехкоординатное устройство для прецизионного перемещения изделий | 1989 |
|
SU1711270A1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1999 |
|
RU2159454C1 |
| US 4685767 А, 11.08.1987 | |||
| Буровой инструмент | 1934 |
|
SU48364A1 |
| Метчик | 1961 |
|
SU149017A1 |

