Уровень техники
Микроэлектромеханические системы (MEMS) обычно включают в себя, по меньшей мере, один подвижный элемент в замкнутом корпусе. Например, пространственные модуляторы света, такие как интерферометрические или преломляющие, отражательные модуляторы, могут содержаться в корпусе, имеющем прозрачное окно, смещенное от подложки посредством кольца или другой упаковочной опоры. Переключатели, основанные на MEMS системах, могут быть упакованы в корпуса, имеющие защитные колпачки, смещенные от подложки подобными компонентами. В основном, MEMS приборы находятся между подложкой и смещенным колпачком или крышкой, поскольку приборы нуждаются в помещении для движения, когда они возбуждаются возбуждающим сигналом.
Указанный тип монтажа в корпусе приводит к рабочей среде для MEMS приборов, которой необходимо управлять. Во многих случаях решение для управления средой внутри корпуса включает в себя создание некоторой среды внутри корпуса и затем его герметичное уплотнение, чтобы гарантировать, что среда остается постоянной. Пример такого процесса герметизации обсуждается в патенте США №6589625, опубликованном 8 июля 2003. Процесс изготовления герметичных корпусов увеличивает стоимость приборов, а также усложняет процесс изготовления,
Другой адаптацией к среде корпуса является использование газопоглотителей. Газопоглотитель представляет собой материал, который вставляется в среду корпуса, чтобы адсорбировать влагу из приборов. Газопоглотитель может адсорбировать воду, когда она образуется в результате работы при высокой температуре, или он может адсорбировать другие материалы, которые, например, дегазируются в результате работы прибора.
Управление влажностью внутренности корпуса оказывает критическое влияние на работу приборов внутри. Высокая влажность может вызвать проблемы с прилипанием, комбинацией прилипания и трения, тогда как полностью сухие среды могут иметь другие эффекты.
Другие аспекты среды могут вызвать проблемы или привести к повышению производительности. Например, снижение парциального давления внутри корпуса может ускорять работу приборов, поскольку могут быть снижены любые эффекты затухания вследствие воздуха между подвижным элементом и подложкой. Последнее может привести к повышенной производительности, поскольку элементы могут двигаться быстрее, чем в средах без сниженного парциального давления.
Сущность изобретения
Один вариант осуществления обеспечивает прибор, который включает в себя первую поверхность и вторую поверхность, смещенную относительно первой поверхности, чтобы сформировать корпус. Прибор этого варианта осуществления дополнительно включает в себя, по меньшей мере, один подвижный элемент внутри корпуса, имеющий подвижную поверхность, чтобы контактировать с другой поверхностью. Прибор этого варианта осуществления дополнительно включает в себя материал управления средой внутри корпуса, предназначенный для того, чтобы воздействовать на работу подвижного элемента.
Другой вариант осуществления обеспечивает способ монтажа в приборном корпусе, способ, включающий в себя формирование, по меньшей мере, одного подвижного элемента на подложке, заключение элемента и подложки в корпусе и включение материала управления средой в корпус, причем материал управления средой выбирается на основе воздействия материала на работу элемента.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием конкретных вариантов его осуществления со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает петлю гистерезиса действующего микроэлектромеханического прибора,
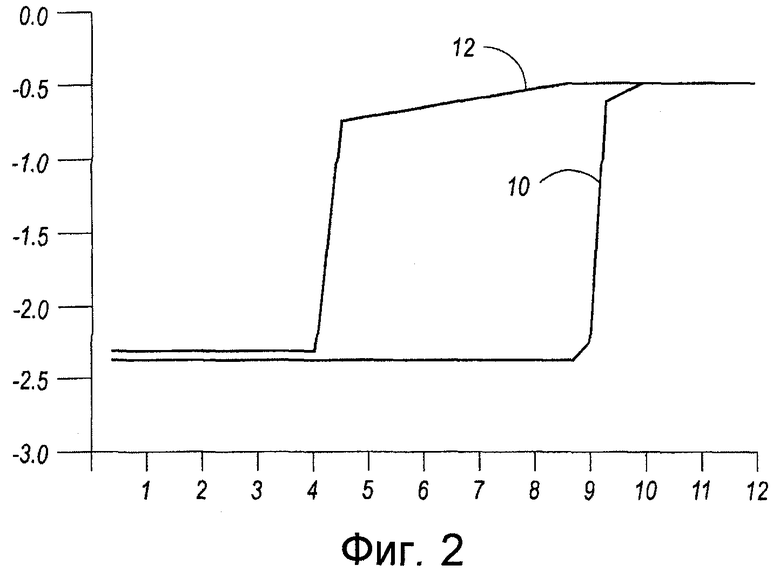
фиг.2 изображает петли гистерезиса действующих микроэлектромеханических приборов в различных условиях окружающей среды,
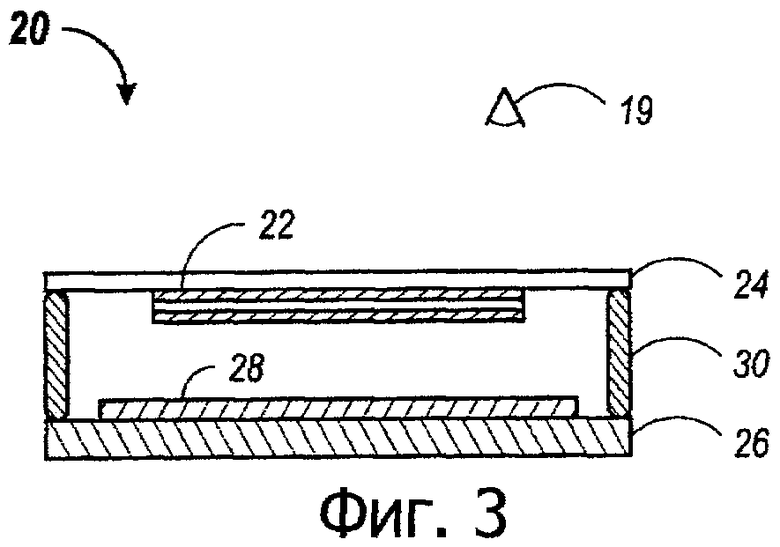
фиг.3 изображает один вариант осуществления приборного корпуса для микроэлектромеханического прибора, включающего в себя материал управления средой,
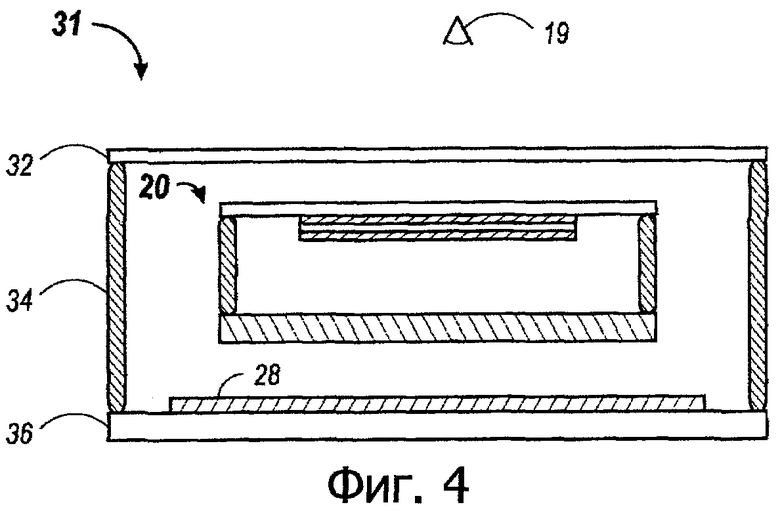
фиг.4 изображает один вариант осуществления модульного корпуса для микроэлектромеханического прибора, включающего в себя материал управления средой,
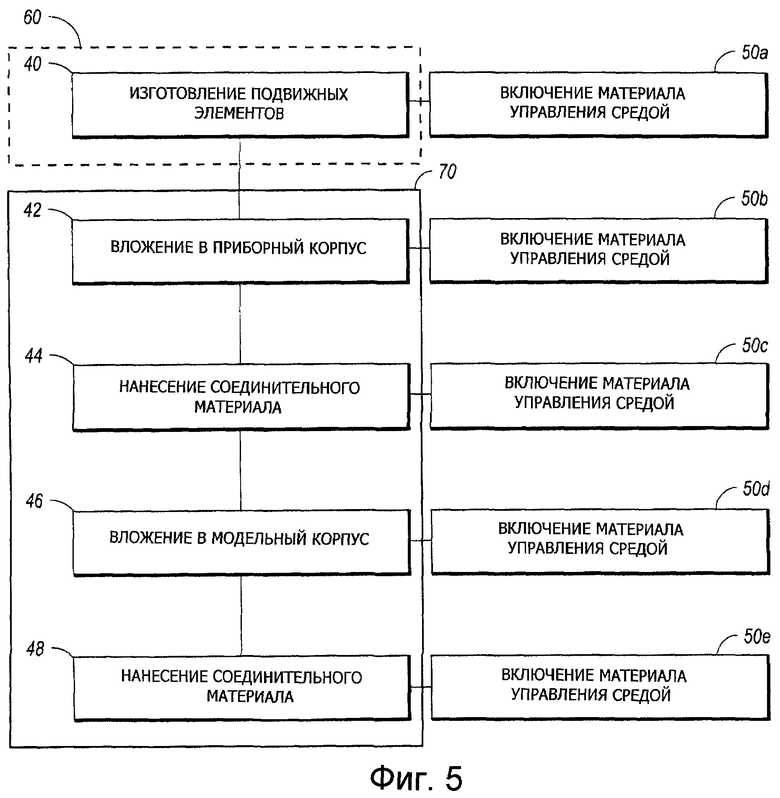
фиг.5 изображает структурную схему процесса изготовления микроэлектромеханического прибора, включающего в себя материал управления средой.
Подробное описание предпочтительных вариантов осуществления
Микроэлектромеханические (MEMS) приборы включают в себя большой класс приборов, в котором механические структуры входят в контакт с другими структурами из различного материала. Например, подвижный элемент может контактировать с поверхностью, покрытой диэлектриком. Наличие влаги в этих типах MEMS приборов может приводить к изменчивому поведению, которое может быть желательным или нет.
Пример нежелательного поведения имеет место, когда влажность в среде работы прибора становится слишком высокой. Когда уровень влажности превышает уровень, выше которого поверхностное натяжение вследствие наличия влаги становится выше, чем сила восстановления подвижного элемента, подвижный элемент может наглухо прилипнуть к поверхности. Если уровень влажности слишком высокий, то влага заряжается до такой же полярности, как подвижный элемент, когда элемент приходит в контакт с покрытой поверхностью. Это может вызвать стягивание петли 10 гистерезиса, изображенной на фиг.1. Фиг.1 показывает типичную рабочую кривую для MEMS прибора в нормальных рабочих условиях.
Если прибор работает при низкой влажности или в полностью сухой среде, поведение прибора может зависеть от конструкции прибора или материалов, например, когда подвижный элемент и покрытая поверхность входят в контакт. Последнее может привести к существенному изменению поведения работы прибора. Фиг.2 сравнивает прибор, работающий в обычной среде, 10, с прибором, работающим в среде с низкой влажностью или без влажности, 12.
В некоторых случаях, в основном в зависимости от применения, упомянутые различные среды могут производить различные результаты. Альтернативно они могут производить результаты, которых следует избегать. Управление средой подвижного элемента или элементов может управлять поведением элементов. Указанное обстоятельство имеет эффекты в нескольких различных аспектах рабочей среды.
Например, электрическое поведение может изменяться, как обсуждалось выше. Величина зарядки, наблюдаемая в MEMS приборах, может управляться с величиной влаги, как может управление электростатическим разрядом (ESD). Присутствие или отсутствие влаги может управляться, чтобы изменять возбуждающее напряжение, то напряжение, которое заставляет подвижный элемент двигаться из исходного положения. Выключающее напряжение, то напряжение, которое заставляет подвижный элемент выходить из его возбужденного положения, также может управляться, или управляться вместо возбуждающего напряжения. Величина напряжения, необходимого для переключения MEMS прибора, также соотносится с величиной тока, необходимого для работы прибора. Заряд в переключающем напряжении может приводить к изменению потребления тока прибора.
Также могут управляться механические эффекты. Различные материалы управления средой могут изменять парциальное давление газов внутри корпуса. Это может изменять времена механического отклика подвижного элемента. В MEMS приборах зазоры между механическими мембранами и подложкой приводят к сопротивлению движению связанного со средним свободным пробега в воздухе. Снижение парциального давления линейно уменьшает затухание и может приводить к значительному уменьшению времени, которое требуется, чтобы подвижный элемент достиг своего возбужденного состояния.
Кроме того, может изменяться механическая жесткость структурной пленки. Управление влажностью внутри корпуса может вызвать оксидирование пленки, изменяя ее механическую жесткость. Измененная механическая жесткость может изменять время отклика или время возврата подвижного элемента.
Также могут изменяться основные характеристики прибора. Например, может настраиваться срок службы прибора. В одном сценарии прибор мог бы выйти из строя после воздействия CO2. Если прибор должен служить 5 лет, то можно управлять адсорбцией CO2. Предположим, что скорость проникновения СО2 составляет (X) грамм/квадратный метр/24 часа. Если А - площадь, через которую проникает CO2, то можно выбрать материал управления средой, имеющий размер пор 5А. Суммарная величина СО2, адсорбированного материалом, равна Y, где Y находится между 0 и 1. Формула для определения количества материала управления средой, которое нужно поместить в корпус, следующая:
(X·5·365·24·A)/Y.
Для MEMS приборов, используемых в оптических применениях, таких как фотоэлектронные переключатели или индикаторные элементы, также могут управляться оптические свойства. Один пример может включать материал, помещенный в прибор, чтобы вызывать образование оксида алюминия на поверхности подвижных элементов в присутствии влаги, тем самым изменяя оптические свойства прибора.
Материал управления средой также может изменять термические эффекты. Одним примером является прибор, который монтируется в корпусе посредством герметизации при уплотнении прибора в вакууме. Рассеяние тепла происходит только посредством излучения. При использовании материала управления средой, который имеет хорошее рассеяние конвективного тепла, больше не требуется герметизации или вакуума. Материал управления средой может состоять из нескольких различных материалов, способных адсорбировать молекулы различных размеров, или различных материалов, таких как вода, кислород и азот. Регенерация материала управления средой также может управляться внутри корпуса.
Другие аспекты прибора, который может управляться материалом управления средой, включают в себя коррозию. Окисление в присутствии влаги и образование кислой среды может повреждать элементы. Например, при высоких температурах из прибора может дегазироваться хлор. При его взаимодействии с влагой может образоваться соляная кислота, которая может повреждать прибор. Указанного эффекта можно избежать путем выбора материала управления средой.
Выбранный материал управления средой может быть вставлен либо в приборный корпус, либо в модульный корпус. На фиг.3 показан приборный корпус 20. Прибор MEMS 22 показан как слой тонких пленок, например, сформированных на подложке 24. В этом конкретном примере прибор представляет собой индикаторный прибор, использующий интерферометрические эффекты, чтобы сформировать изображения из падающего света. Элементы интерферометрического модулятора формируются на подвижном элементе, который входит в контакт с другой поверхностью, такой как подложка или часть показанной стопки тонких пленок. Наблюдатель 19 может через подложку 24 видеть изображения, формируемые модулятором. Задний щиток или вторая поверхность 26 может быть смещена относительно подложки 24, первой поверхности, и соединена с ней боковыми сторонами 30, содержащими соединительный материал, который формирует корпус. Альтернативно задний щиток может быть сформирован из структуры, имеющей вторую поверхность 26 и боковые стороны 30, где задний щиток 26 и боковые стороны 30 могут быть одним модулем. Это формирует задний щиток с выемкой, вмещающей модулятор. Материал 28 управления средой вставляется в корпус, чтобы вызывать или избегать вышеупомянутых эффектов.
В альтернативном варианте осуществления материал управления средой может быть вставлен в модульный корпус, который, как определено здесь, является корпусом, в котором содержится приборный корпус, показанный на фиг.4. Модульный корпус 31 имеет первую поверхность 32, смещенную относительно второй поверхности 36 соединительным материалом 34. Внутри модульного корпуса 31 находится приборный корпус 20. Материал 28 управления средой вставляется в модульный корпус 31. Кроме того, материал управления средой может быть сделан частью корпуса, будучи сделанным частью соединительного материала 34, подложки или частью изделия прибора. В одном варианте осуществления окно модулятора 20 и первая поверхность 32 модульного корпуса 31 может быть одной и той же поверхностью или монтироваться так, чтобы они формировали одну структуру. В этом случае первая поверхность могла бы быть первой поверхностью обоих модульного корпуса 31 и приборного корпуса 20.
Вариант осуществления процесса изготовления показан на фиг.5. Процесс имеет три базовых этапа: изготовление подвижных элементов, этап 60, монтаж в приборном корпусе, этап 70, и включение материала управления средой, этапы 50а-50е. Изготовление подвижных элементов, этап 40, может включать введение материала управления средой на этапе 50а. Материал управления средой может быть выполнен как часть подложки, при изготовлении самих элементов или во время обработки различных материалов во время формирования элементов, например при осаждении тонких пленок.
Процесс монтажа в корпусе может включать или не включать модульный корпус. Подвижные элементы вкладываются в приборный корпус, этап 42. Материалы управления средой могут быть введены в приборный корпус на этапе 50b, как обсуждалось ранее. Соединительный материал наносится на этапе 44, формируя приборный корпус между первой и второй поверхностями. Как упоминалось ранее, материал управления средой может вводиться в корпус как часть соединительного материала на этапе 50с.
Если прибор должен вкладываться в модульный корпус на этапе 46, модульный корпус при этом может иметь материалы управления средой на этапе 50d. Затем, на этапе 48, наносится соединительный материал, чтобы сформировать модульный корпус, причем материал управления средой может быть включен на этапе 50е. Процесс может включать в себя приборный корпус, модульный корпус или и то, и другое. Процесс монтажа в корпусе включает в себя соединение первой поверхности или второй поверхности с соединительным материалом, будь то первая поверхность и вторая поверхность приборным корпусом или модульным корпусом.
Материалы, используемые в каждой части процесса, могут варьироваться в зависимости от MEMS прибора и его применения, а также от желательного воздействия на среду. Приборный корпус будет в основном включать в себя подложку и задний щиток. Подложка или первая поверхность прибора или модульного корпуса может включать в себя среди прочих стекло, пластмассу, металл, кремний или керамику. Задний щиток или вторая поверхность прибора или модульного корпуса может быть стеклом, пластмассой, металлом, металлической фольгой, кремнием, керамикой, текучей средой и т.п. Соединительный материал, используемый в любом корпусе, может быть из группы адгезивов на основе эпоксидной смолы, материалов для кольцевого уплотнения, PIB, полиуретанов, адгезивов с материалами управления средой, тонкопленочных паяных соединений металл-металл, жидких покрытий на стекле, полученных методом центрифугирования, припоев, выращенных на месте слоев полимеров или пластика для формирования уплотнений.
Материалы управления средой могут быть цеолитами, что является общим названием алюмосиликатов натрия, имеющих различные размеры пор, ультрафильтров, поверхностных или объемных адсорбентов, которые поглощают другие молекулы на поверхности или в объеме, или влагопоглотителей. Материал управления средой может быть химическим реактивом, который реагирует с нежелательным материалом, образуя безвредные соединения, как те, что адсорбируют влагу, образуя другое соединение, которое является инертным. Материалы управления средой могут производиться как приборы, которые физически блокируют утечку молекул, как только молекулы попадают внутрь материалов управления средой. Ультрафильтры могли бы внедряться в тонкие пленки, осаждаемые или получаемые методом центрифугирования на полимерах. Ультрафильтры могут распыляться на поверхности прибора или готовиться заранее и регенерироваться перед использованием, а также наноситься как покрытие погружением.
В дополнение к различным типам материалов и различным способам их нанесения материалы управления средой могут быть разных очертаний, размеров и форм. Материал управления средой может быть твердым телом, порошком, который засыпается непосредственно внутрь корпуса и смешивается с адгезивом для нанесения. Материалы могут быть сформированы в форме цилиндра, листов и т.п. и затем наноситься внутри корпуса. Материал может быть изготовлен методом трафаретной печати или распределением жидкости внутри корпуса или на подложке. Нанесение материала предоставляется определять системному проектировщику.
Таким образом, хотя до сих пор были описаны конкретные варианты осуществления способа и устройства MEMS приборов, имеющих материалы управления средой, упомянутые специфические ссылки не должны рассматриваться как ограничения рамок изобретения, которые формулируются в следующих пунктах формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМЕХАНИЧЕСКИЙ ЭЛЕМЕНТ | 2010 |
|
RU2559032C9 |
| УПРАВЛЕНИЕ ЭЛЕКТРОМЕХАНИЧЕСКОЙ РЕАКЦИЕЙ СТРУКТУР В УСТРОЙСТВЕ НА ОСНОВЕ МИКРОЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ | 2005 |
|
RU2381532C2 |
| КОНФОРМНЫЙ ДАТЧИК СКОРОСТИ ВОЗДУХА С МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ (MEMS) | 2015 |
|
RU2620876C2 |
| МИКРОМЕХАНИЧЕСКИЙ КОМПОНЕНТ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2006 |
|
RU2371378C2 |
| Карбидокремниевый пленочный функциональный элемент прибора и способ его изготовления | 2023 |
|
RU2816687C1 |
| ЭЛЕМЕНТ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2008 |
|
RU2424972C1 |
| СПОСОБ И СИСТЕМА ДЛЯ МОНТАЖА В КОРПУС УСТРОЙСТВ НА ОСНОВЕ МЭМС С ВНЕДРЕННЫМ ГАЗОПОГЛОТИТЕЛЕМ | 2005 |
|
RU2379227C2 |
| МИНИАТЮРИЗИРОВАННАЯ ИНТЕГРАЛЬНАЯ СХЕМА МАТРИЦЫ ОПТИЧЕСКИХ ДАТЧИКОВ, ВЫПОЛНЕННАЯ ПО ПРИНЦИПАМ МИКРОЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ (MEMS) | 2011 |
|
RU2565351C2 |
| ДАТЧИК СОДЕРЖАНИЯ АЛКОГОЛЯ НА ОСНОВЕ MEMS И ИНТЕЛЛЕКТУАЛЬНОЕ УСТРОЙСТВО | 2020 |
|
RU2822974C1 |
| Способ изготовления инерциальных чувствительных элементов микроэлектромеханических систем | 2024 |
|
RU2835761C1 |
Микроэлектромеханические системы (MEMS) обычно включают в себя, по меньшей мере, один подвижный элемент в замкнутом корпусе, например пространственные модуляторы света. Технический результат направлен на повышение точности и повышение производительности. Устройство MEMS, содержит первую поверхность; вторую поверхность, смещенную относительно первой поверхности, чтобы сформировать корпус. По меньшей мере, один подвижный элемент внутри корпуса, имеющий подвижную поверхность, чтобы контактировать с другой поверхностью. Материал управления средой внутри корпуса, предназначенный для того, чтобы воздействовать на работу подвижного элемента. При этом упомянутый корпус заключен внутри второго корпуса. Способ монтажа в приборном корпусе реализуется по вышеуказанному устройству. 2 н. и 28 з.п. ф-лы, 5 ил.
1. Устройство MEMS, содержащее
первую поверхность;
вторую поверхность, смещенную относительно первой поверхности, чтобы сформировать корпус;
по меньшей мере, один подвижный элемент внутри корпуса, имеющий подвижную поверхность, чтобы контактировать с другой поверхностью; материал управления средой внутри корпуса, предназначенный для того, чтобы воздействовать на работу подвижного элемента,
при этом упомянутый корпус заключен внутри второго корпуса.
2. Устройство по п.1, в котором первая поверхность содержит подложку.
3. Устройство по п.2, в котором подложка содержит, по меньшей мере, одно из следующих веществ: стекло, пластмасса, металл, кремний и керамика.
4. Устройство по п.1, в котором вторая поверхность содержит задний щиток.
5. Устройство по п.4, в котором задний щиток содержит, по меньшей мере, одно из следующих веществ: стекло, пластмасса, металл, металлическая фольга, кремний, керамика и текучая среда.
6. Устройство по п.1, дополнительно содержащее соединительный материал, предназначенный для того, чтобы соединять первую поверхность и вторую поверхность.
7. Устройство по п.6, в котором соединительный материал содержит один материал, выбранный из группы, состоящей из следующих: адгезивы на основе эпоксидной смолы, кольцевые уплотнения, PIB, полиуретаны, адгезивы с внедренным цеолитом, тонкопленочные паяные металлические соединения, жидкие покрытия на стекле, полученные методом центрифугирования, припой, выращенные полимеры и выращенные пластиковые слои.
8. Устройство по п.1, в котором материал управления средой содержит один материал, выбранный из группы, состоящей из следующих: цеолиты, ультрафильтры, влагопоглотители, поверхностные адсорбенты или объемные адсорбенты, химические реактивы и физические ограничители.
9. Устройство по п.8, в котором ультрафильтры формируются посредством процесса, выбранного из группы, состоящей из следующих: ультрафильтры в осажденных тонких пленках, ультрафильтры, получаемые методом центрифугирования на полимерах, ультрафильтры, распыленные на поверхности прибора, и регенерированные ультрафильтры, приготовленные заранее.
10. Устройство по п.1, в котором первая поверхность и вторая поверхность смещены, чтобы сформировать корпус, который содержит первую и вторую поверхности модульного корпуса.
11. Устройство по п.1, в котором материал управления средой содержит материал управления средой, встроенный в подвижный элемент.
12. Устройство по п.1, в котором материал управления средой содержит материал управления средой, встроенный в компонент корпуса.
13. Устройство по п.1, в котором работа подвижного элемента содержит приведение в движение подвижной поверхности.
14. Устройство по п.1, в котором работа подвижного элемента содержит приведение в контакт подвижного элемента и первой поверхности.
15. Устройство по п.1, в котором первая поверхность и вторая поверхность смещены относительно друг друга для формирования корпуса, который содержит первую поверхность, имеющую боковые стороны, предназначенные для выполнения смещения.
16. Устройство по п.1, в котором первая поверхность содержит поверхность, общую как для упомянутого корпуса, так и для упомянутого заключенного корпуса.
17. Способ монтажа в приборном корпусе, содержащий
формирование, по меньшей мере, одного подвижного элемента на подложке;
заключение элемента и подложки в первом корпусе;
заключение первого корпуса во втором корпусе; и
включение материала управления средой в первый корпус, причем материал управления средой выбирается на основе влияния материала на работу элемента.
18. Способ по п.17, в котором формирование, по меньшей мере, одного подвижного элемента содержит формирование интерферометрического модулятора.
19. Способ по п.17, в котором заключение элемента и подложки в корпусе содержит заключение элемента и подложки в приборном корпусе, и в котором включение материала управления средой содержит включение материала управления средой в приборный корпус.
20. Способ по п.17, в котором заключение элемента и подложки в корпусе содержит заключение элемента и подложки в модульном корпусе, и в котором включение материала управления средой содержит включение материала управления средой в модульный корпус.
21. Способ по п.17, в котором формирование, по меньшей мере, одного подвижного элемента на подложке содержит формирование подвижного элемента из тонких пленок, и в котором включение материала управления средой содержит включение материала управления средой, встроенного в одну из тонких пленок.
22. Способ по п.17, в котором включение материала управления средой содержит встраивание материала управления средой в подложку.
23. Способ по п.17, дополнительно содержащий соединение подложки и заднего щитка с помощью соединительного материала.
24. Способ по п.23, в котором соединение подложки и заднего щитка с помощью соединительного материала содержит соединение подложки и заднего щитка с помощью соединительного материала, содержащего материал управления средой.
25. Способ по п.17, в котором включение материала управления средой содержит добавление порошка внутрь корпуса.
26. Способ по п.17, дополнительно содержащий придание материалу управления средой форм и его введение внутрь корпуса.
27. Способ по п.17, в котором включение материала управления средой содержит нанесение материала управления средой в виде распыления.
28. Способ по п.17, в котором включение материала управления средой содержит нанесение материала управления средой в виде покрытия погружением.
29. Способ по п.17, в котором включение материала управления средой содержит нанесение материала управления средой методом трафаретной печати.
30. Способ по п.17, в котором включение материала управления средой содержит распределение материала управления средой в форме жидкости.
| US 2003054588 A1, 20.03.2003 | |||
| US 5939785 A, 17.08.1999 | |||
| US 5936758 A, 10.08.1999 | |||
| US 5610438 A, 11.03.1997. |

