УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение в целом относится к датчикам для измерения скорости воздушного летательного аппарата по отношению к окружающей его воздушной массе (далее "скорость воздуха").
Воздушному летательному аппарату необходимо иметь собственные результаты измерения скорости воздуха во время полета для управления воздушным летательным аппаратом, оценки его аэродинамических характеристикам и потенциальной потери скорости. Это обычно реализуют с использованием трубки Пито, которая состоит из трубки, направленной непосредственно в поток воздуха. С использованием внутренней текучей среды, на которую давит воздух, давление этой текучей среды может быть измерено и использовано для вычисления давления торможения воздуха. Для вычисления скорости воздуха выполняют сравнение в отношении статического давления, измеренного из отверстий для отбора статического давления, снабженных барометром. Затем с использованием уравнения Бернулли может быть вычислено динамическое давление (следовательно, скорость воздуха).
Современные трубки Пито нагреваются, однако они все еще имеют проблемы, связанные с обледенением и закупориванием, что делает проблематичным их использование в конкретных условиях. В частности, трубка Пито может быть закупорена внешним объектом во время нахождения самолета на земле, трубка Пито также может обледенеть даже при нагревании, причем трубка Пито увеличивает лобовое сопротивление по сравнению с техническим решением, которое обеспечивает более точное соответствие внешней форме воздушного летательного аппарата.
Существует потребность в альтернативной методике измерения скорости воздуха, на которую не влияет ни обледенение, ни какое-либо иное закупоривание и которая уменьшает лобовое сопротивление.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение, раскрытое в настоящей заявке, направлено на системы и способы измерения скорости воздуха, которые предотвращают помехи для трубок Пито. Системы, раскрытые подробно далее, решают проблему обледенения или закупоривания трубок Пито путем создания внешней поверхности на воздушном летательном аппарате, которая проводит воздух и измеряет разницу давлений между давлением через поток воздуха и статическим давлением. Данная внешняя поверхность не может быть просто закупорена как трубка, поскольку воздух всегда находится в текучем состоянии, когда воздушный летательный аппарат находится в движении, а любой внешний объект, который может быть расположен на внешней поверхности, оказывается полностью видимым, причем внешняя поверхность может быть нагрета для предотвращения обледенения. Кроме того, внешняя поверхность выполнена из гибкого материала, который выполнен с возможностью более точного соответствия внешней форме воздушного летательного аппарата.
Согласно вариантам реализации, раскрытым в настоящей заявке, система содержит датчики давления с микроэлектромеханической системой (MEMS), расположенные под каналами для воздуха для измерения разницы давлений в каждом канале, и устройство обработки данных о скорости воздуха для преобразования разниц давлений от датчиков давления в оценку скорости звука. Данный подход имеет следующие преимущества:
(1) Один или более датчиков давления с микроэлектромеханической системой (MEMS), установленных под каждым каналом для воздуха, измеряют непосредственно разницу давлений под потоком и статическое давление под конформной поверхностью.
(2) Все внешние поверхности могут быть нагреты, что уменьшает возможность образования наледи.
(3) Конформная поверхность может уменьшать лобовое сопротивление по сравнению с внешней трубкой Пито.
(4) Каналы для воздуха ничем не охвачены (в отличие от трубок Пито), что уменьшает вероятность закупоривания.
(5) В каналах для воздуха всегда есть поток воздуха, когда воздушный летательный аппарат находится в движении, что дополнительно уменьшает возможность закупоривания.
(6) Любой внешний объект или повреждение на снабженной каналом поверхности оказывается видимым до взлета.
Они обеспечивают преимущества для любых аэрокосмических устройств, которые измеряют скорость воздуха и которые имеют риск обледенения или закупоривания.
Один аспект настоящего изобретения, раскрытый подробно далее, представляет собой устройство, содержащее: гибкую конструкцию, имеющую внешнюю поверхность со сформированным в ней открытым каналом для воздуха, и датчик давления, установленный в гибкой конструкции в положении с нижней стороны и сообщающийся по текучей среде с открытым каналом для воздуха. Гибкая конструкция содержит входное отверстие для отбора статического давления и камеру статического давления, сообщающуюся по текучей среде с указанным входным отверстием, причем датчик давления сообщается по текучей среде с камерой статического давления. Согласно некоторым вариантам реализации, датчик давления представляет собой емкостной датчик дифференциального давления, содержащий микроэлектромеханическую систему. В частности, датчик давления содержит деформируемую диафрагму-мембрану, имеющую сформированный на ней первый электрод, и подложку, имеющую сформированный на ней второй электрод, причем первый и второй электроды отделены друг от друга на расстояние, которое представляет собой функцию от отклонения деформируемой диафрагмы-мембраны. Открытый канал для воздуха содержит суженную часть, причем датчик давления расположен под суженной частью первого открытого канала для воздуха.
Согласно некоторым вариантам реализации, устройство дополнительно содержит нагревательный элемент, который термически соединен с внешней поверхностью гибкой конструкции. Внешняя поверхность гибкой конструкции может быть выполнена из металла или пластика. В случаях, в которых внешняя поверхность гибкой конструкции выполнена из нетеплопроводного материала, такого как пластик, устройство дополнительно содержит теплопроводный гель, посредством которого нагревательный элемент термически соединен с внешней поверхностью гибкой конструкции.
Согласно некоторым вариантам реализации, внешняя поверхность гибкой конструкции имеет первый и второй сформированные в ней открытые каналы для воздуха, а устройство дополнительно содержит первый и второй датчики давления, установленные в гибкой конструкции в положениях с нижней стороны и сообщающиеся по текучей среде соответственно с первым и вторым открытыми каналами для воздуха. В этих случаях устройство дополнительно содержит: первую схему регулирования (conditioning) сигналов, присоединенную для регулирования выходного аналогового сигнала первым датчиком давления, первый аналого-цифровой преобразователь, присоединенный для преобразования отрегулированного выходного аналогового сигнала первой схемой регулирования сигналов в первый цифровой сигнал, вторую схему регулирования сигналов, присоединенную для регулирования выходного аналогового сигнала вторым датчиком давления, второй аналого-цифровой преобразователь, присоединенный для преобразования отрегулированного выходного аналогового сигнала второй схемой регулирования сигналов во второй цифровой сигнал, и устройство обработки данных, запрограммированное для расчета оценки скорости воздуха с учетом первого и второго цифровых сигналов.
Еще один аспект настоящего изобретения, подробно раскрытый далее, представляет собой систему, содержащую самолет, имеющий внешнюю поверхность и конформный датчик скорости воздуха, прикрепленный к внешней поверхности самолета, причем конформный датчик скорости воздуха содержит: гибкую конструкцию, имеющую внешнюю поверхность со сформированными в ней первым и вторым открытыми каналами для воздуха, первый емкостной датчик дифференциального давления, установленный в гибкой конструкции в положении с нижней стороны и сообщающийся по текучей среде с первым открытым каналом для воздуха, второй емкостной датчик дифференциального давления, установленный в гибкой конструкции в положении с нижней стороны и сообщающийся по текучей среде со вторым открытым каналом для воздуха, и электронную схему, которая запрограммирована или выполнена с возможностью оценки скорости воздуха воздушного летательного аппарата по меньшей мере частично на основании выходных сигналов первым и вторым емкостными датчиками дифференциального давления. В некоторых вариантах реализации гибкая конструкция содержит входное отверстие для отбора статического давления, а также первую и вторую камеры статического давления, сообщающиеся по текучей среде с указанным входным отверстием, причем первый датчик давления расположен между первым открытым каналом для воздуха и первой камерой статического давления, а второй датчик давления расположен между вторым открытым каналом для воздуха и второй камерой статического давления. Каждый из первого и второго открытых каналов для воздуха содержит соответствующую суженную часть, причем первый емкостной датчик дифференциального давления расположен под суженной частью первого открытого канала для воздуха, а второй емкостной датчик дифференциального давления расположен под суженной частью второго открытого канала для воздуха. Согласно одной реализации, электронная схема содержит: первую схему регулирования сигналов, присоединенную для регулирования выходного аналогового сигнала первым емкостным датчиком дифференциального давления расположен, первый аналого-цифровой преобразователь, присоединенный для преобразования отрегулированного выходного аналогового сигнала первой схемой регулирования сигналов в первый цифровой сигнал, вторую схему регулирования сигналов, присоединенную для регулирования выходного аналогового сигнала вторым емкостным датчиком дифференциального давления, второй аналого-цифровой преобразователь, присоединенный для преобразования отрегулированного выходного аналогового сигнала второй схемой регулирования сигналов во второй цифровой сигнал, и устройство обработки данных, запрограммированное для расчета оценки скорости воздуха с учетом первого и второго цифровых сигналов.
Еще один аспект раскрытого изобретения представляет собой способ оценки скорости летательного аппарата или судна, выполненного с возможностью перемещения через текучую среду, согласно которому: закрепляют на внешней поверхности летательного аппарата или судна гибкую конструкцию, которая имеет внешнюю поверхность со сформированными в ней одним или более открытыми каналами для воздуха, передают сигналы от одного или более датчиков дифференциального давления, установленных под суженными частями указанного одного или более открытых каналов для воздуха, и рассчитывают скорость летательного аппарата или судна относительно окружающей текучей среды во время его перемещения на основании плотности текучей среды и сигналов, передаваемых указанным одним или более датчиками дифференциального давления. Каждый сигнал, передаваемый каждым датчиком дифференциального давления, отражает разницу между статическим давлением под соответствующим открытым каналом для воздуха и общим давлением в том же самом открытом канале для воздуха. Способ может дополнительно включать регулирование аналоговых сигналов, передаваемых датчиками дифференциального давления, и преобразование этих аналоговых сигналов в цифровые сигналы. В одной реализации этап расчета включает: преобразование цифровых значений в соответствующие оценки скорости частично на основании плотности текучей среды, расчет оценки средней скорости на основании указанных оценок скорости и фильтрацию последующих оценок скорости, которые отличаются от оценки средней скорости более чем на конкретное пороговое значение. В раскрытых вариантах реализации текучая среда представляет собой воздух, а летательный аппарат или судно представляет собой воздушный летательный аппарат.
Другие аспекты конформных датчиков скорости воздуха на основе технологии микроэлектромеханических систем (MEMS) раскрыты и заявлены далее.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
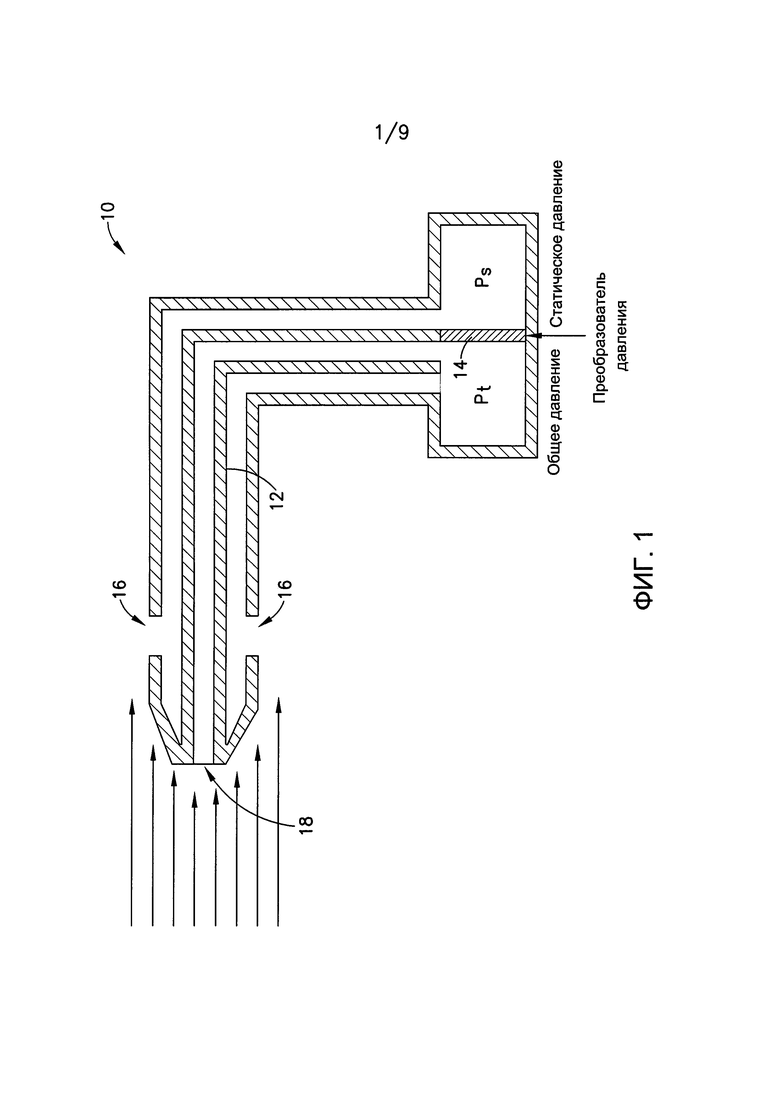
На фиг. 1 показана схема, отражающая вид в разрезе обычного датчика скорости воздуха в трубке Пито.
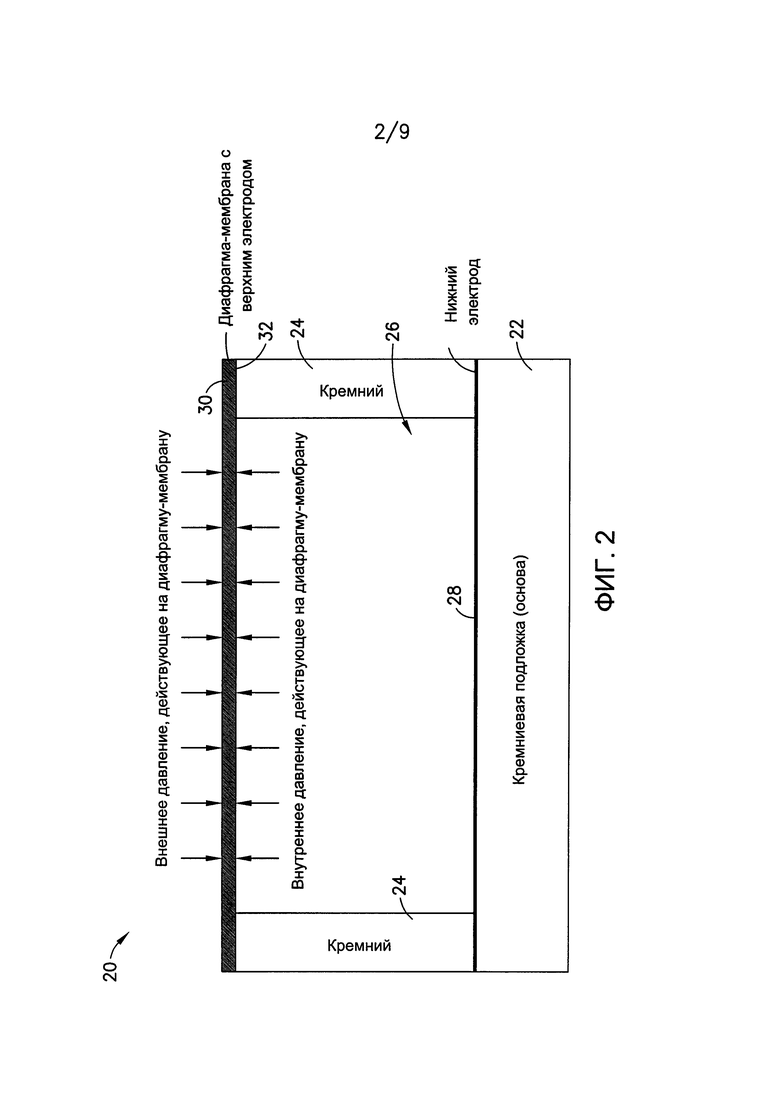
На фиг. 2 показана схема, отражающая вид в разрезе емкостного датчика дифференциального давления на основе технологии микроэлектромеханических систем (MEMS), который подходит для использования в конформном датчике скорости воздуха. Данный датчик дифференциального давления на основе технологии микроэлектромеханических систем (MEMS) имеет диафрагму-мембрану, которая показана в недеформированном состоянии на фиг. 2.
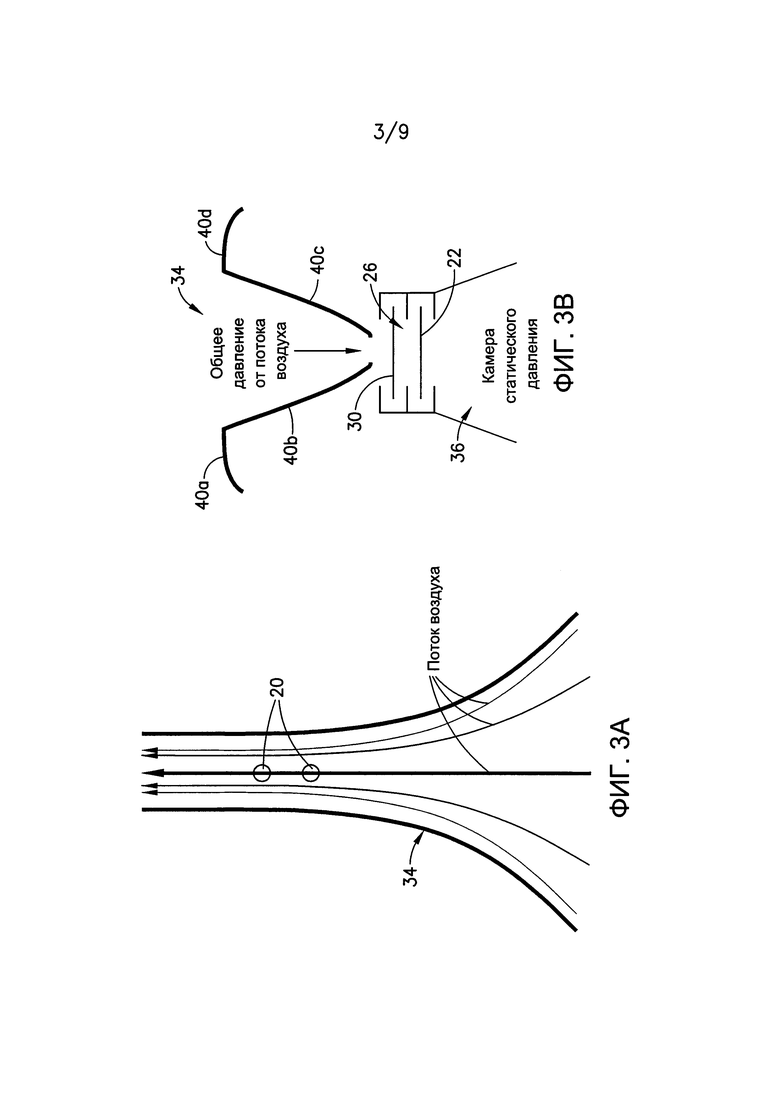
На фиг. 3А показана схема, отражающая вид сверху части канала для воздуха с размещенными в нем датчиками давления на основе технологии микроэлектромеханических систем (MEMS) согласно одному варианту реализации. Стрелки отражают поток воздуха через канал, причем более жирные стрелки отражают более высокую скорость воздуха.
На фиг. 3В показана схема, отражающая вид в разрезе канала для воздуха, частично показанного на фиг. 3А, причем линия разреза проведена через центр одного из датчиков давления на основе технологии микроэлектромеханических систем (MEMS).
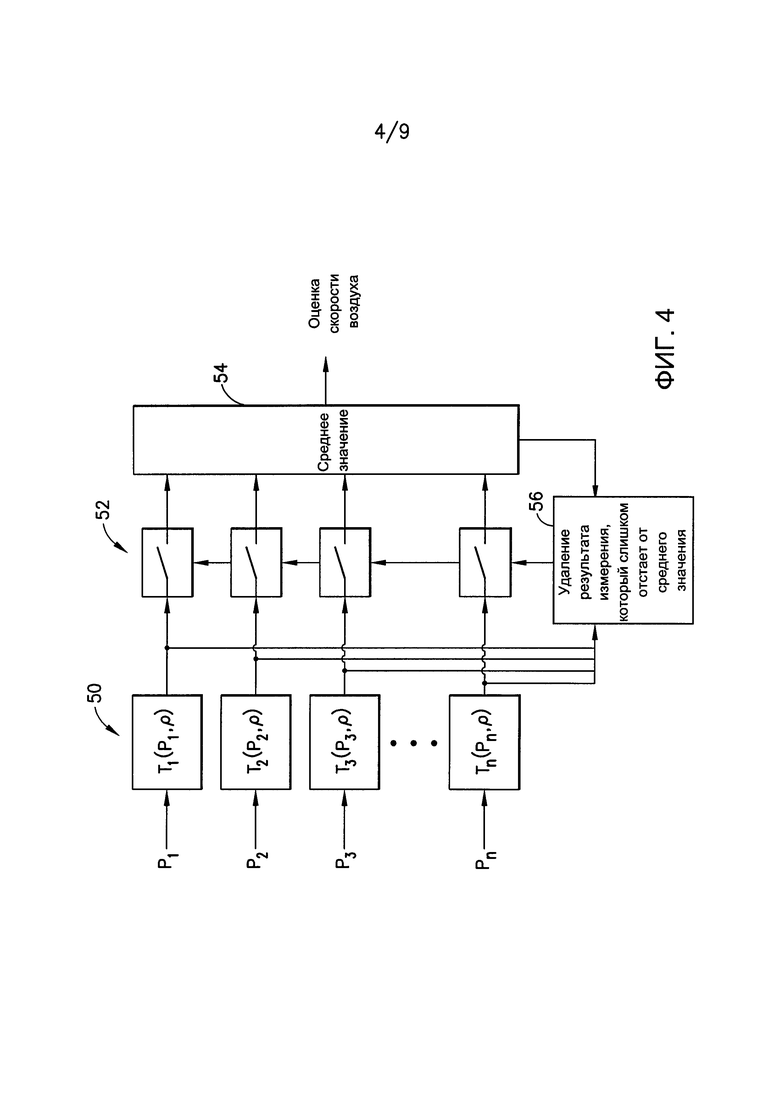
На фиг. 4 показана блок-схема, иллюстрирующая операции процесса оценки избыточных данных о скорости воздуха согласно одному варианту реализации.
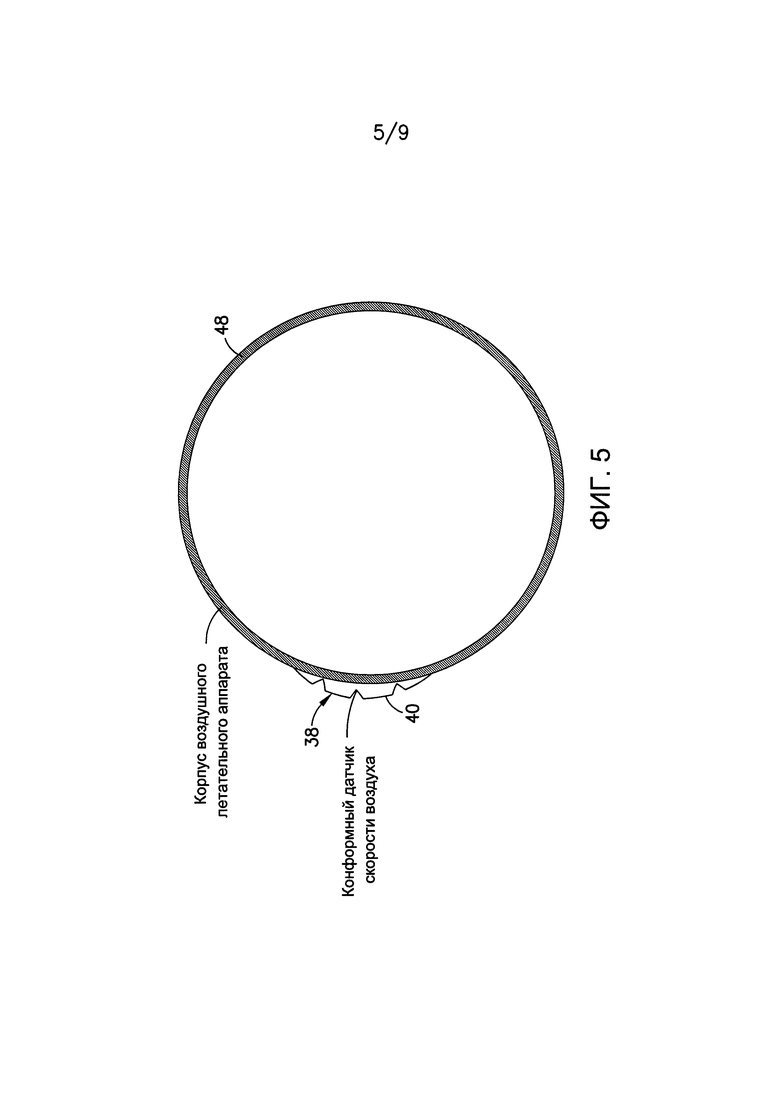
На фиг. 5 показана схема, отражающая вид в разрезе корпуса (то есть фюзеляжа) воздушного летательного аппарата, имеющего конформный датчик скорости воздуха на основе технологии микроэлектромеханических систем (MEMS), установленный на его внешней поверхности.
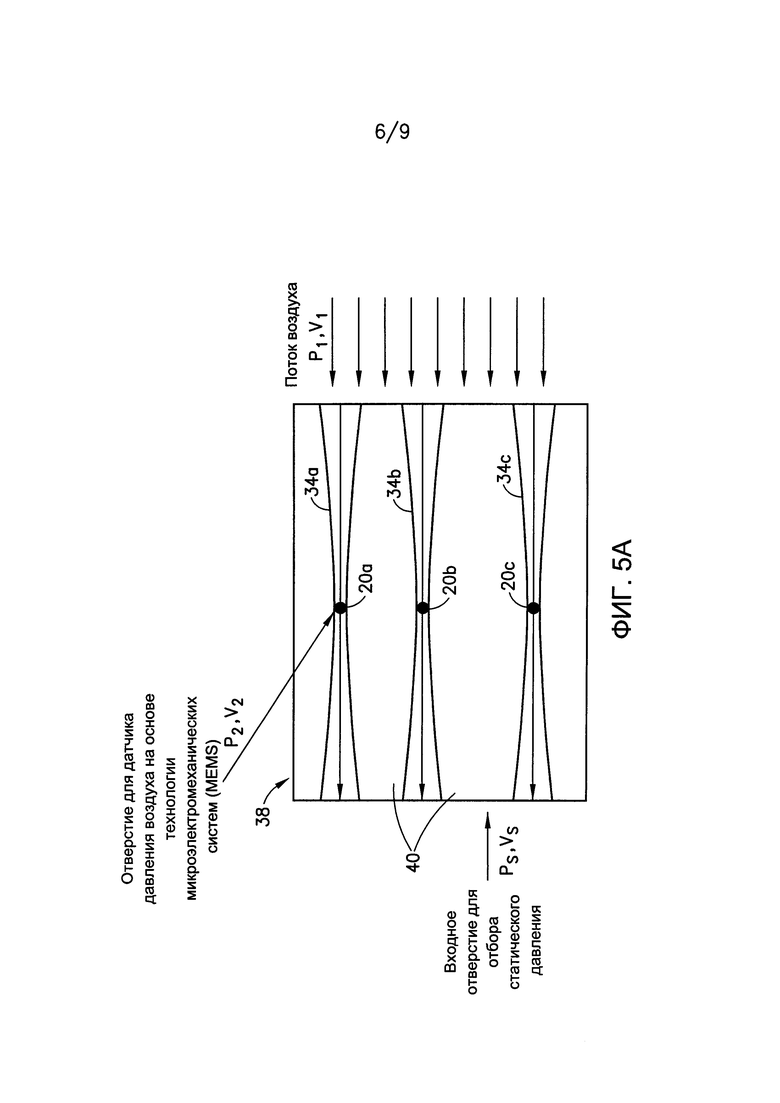
На фиг. 5А показана схема, отражающая вид сверху конформного датчика скорости воздуха на основе технологии микроэлектромеханических систем (MEMS), установленного на внешней поверхности корпуса воздушного летательного аппарата, показанного на фиг. 5.
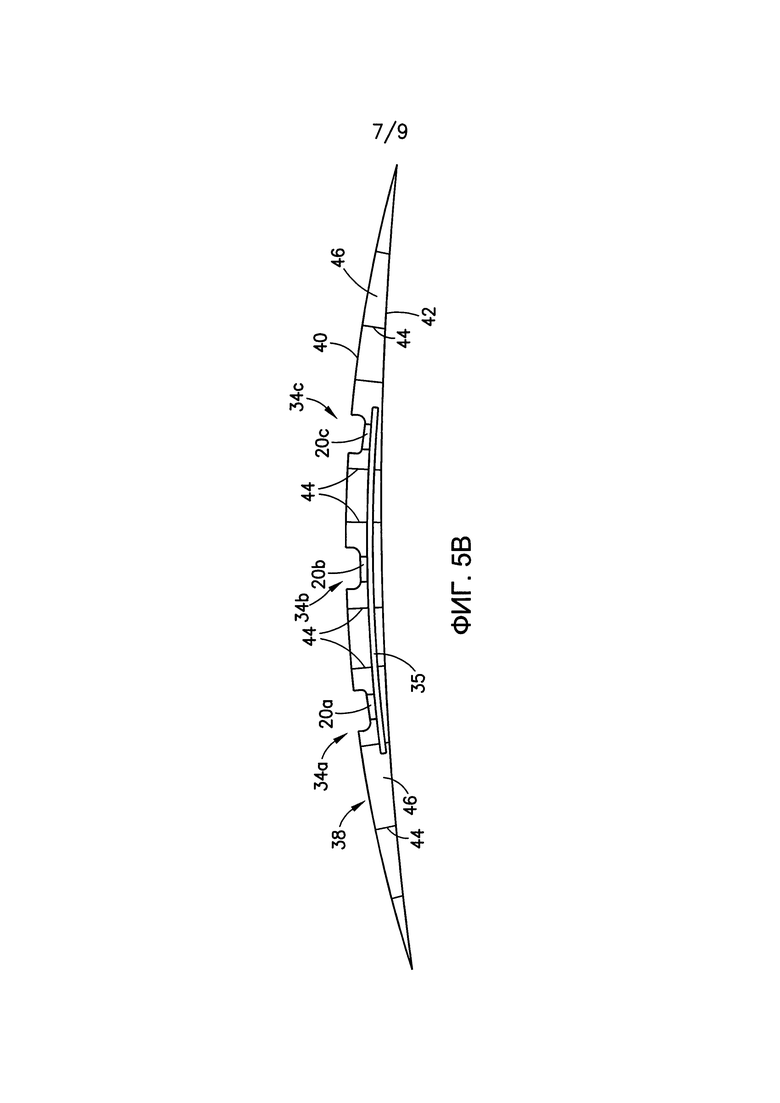
На фиг. 5В показана схема, отражающая вид в разрезе конформного датчика 38 скорости воздуха на основе технологии микроэлектромеханических систем (MEMS), имеющего конформную поверхность, выполненную из пластикового материала, причем разрез выполнен через множество датчиков давления на основе технологии микроэлектромеханических систем (MEMS), установленных под соответствующими каналами для воздуха.
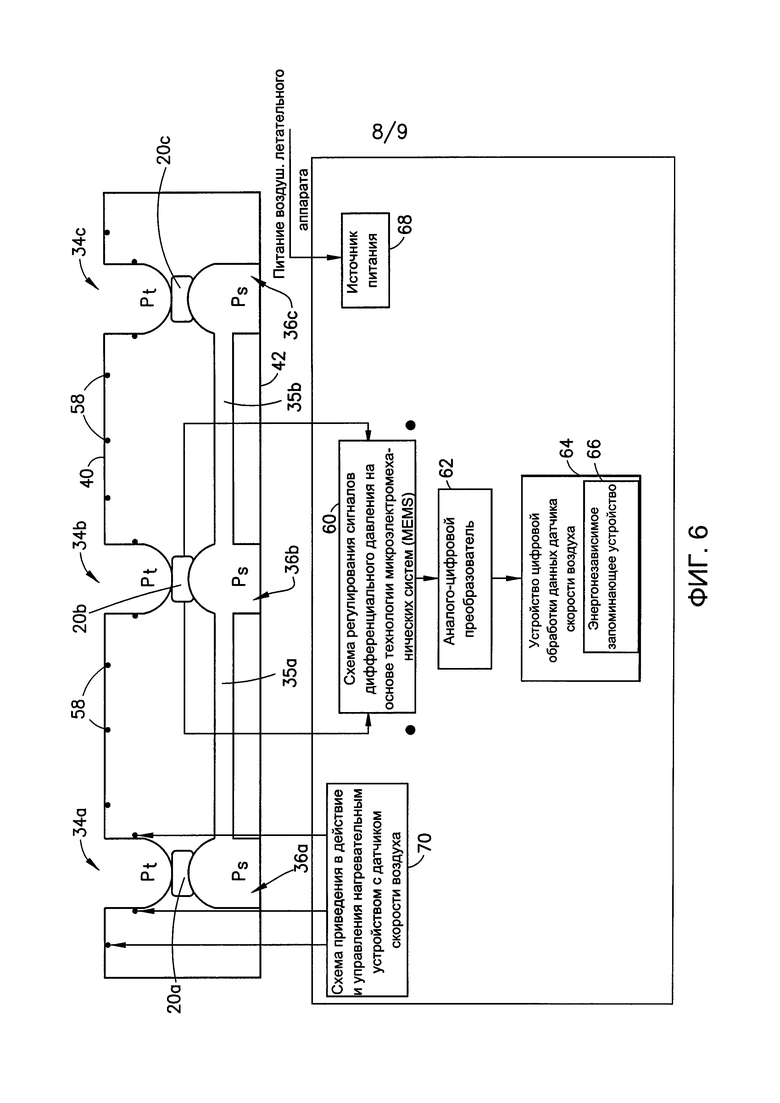
На фиг. 6 показана схема, иллюстрирующая компоненты конформного датчика скорости воздуха, имеющего конформную поверхность, выполненную из металла, согласно альтернативному варианту реализации. Верхняя часть по фиг. 6 представляет вид в разрезе (не показан в масштабе, увеличен по глубине) конформной поверхности, снабженной множеством датчиков давления на основе технологии микроэлектромеханических систем (MEMS) (не показана криволинейная сужающаяся форма при установке), а в нижней части на фиг. 6 показана блок-схема, иллюстрирующая соответствующие электрические компоненты.
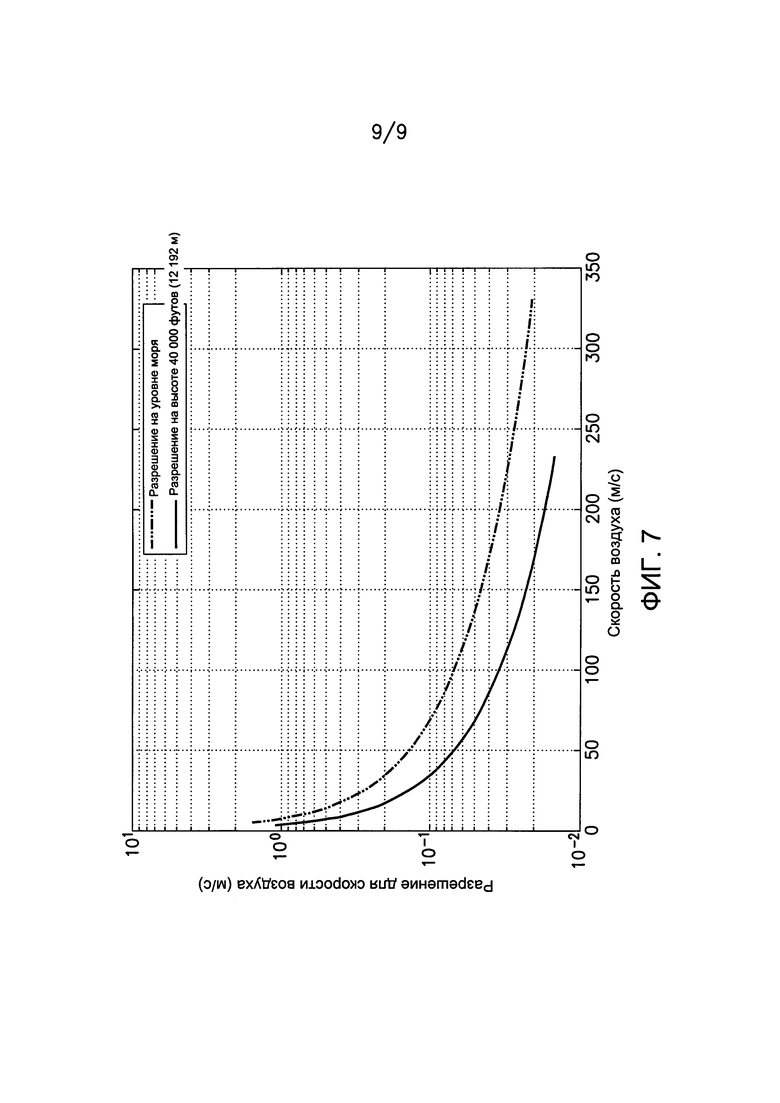
На фиг. 7 показан график, иллюстрирующий теоретическое разрешение для скорости воздуха при использовании технологии микроэлектромеханических систем (MEMS) по отношению к скорости воздуха на уровне моря  и при 40000 футах (12192 м)
и при 40000 футах (12192 м)  .
.
Далее будет приведена ссылка на чертежи, на которых схожие элементы на различных чертежах имеют одни и те же ссылочные номера.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Для целей иллюстрации будут подробно описаны варианты реализации системы и способа измерения скорости воздуха, которые используют датчики давления на основе технологии микроэлектромеханических систем (MEMS). Однако, могут быть использованы альтернативные датчики давления с подходящими размером и чувствительностью, которые не изготовлены с использованием модифицированный технологий изготовления полупроводниковых устройств.
Согласно вариантам реализации, раскрытым в настоящей заявке, система содержит матрицу емкостных датчиков дифференциального давления на основе технологии микроэлектромеханических систем (MEMS) с регулированием связанных с ними сигналов и конструкцию частично гибкой конформной поверхности с каналами для воздуха и отверстиями для вставки емкостного датчика дифференциального давления на основе технологии микроэлектромеханических систем (MEMS), а также с впускным отверстием для впуска статического воздуха. Система дополнительно содержит устройство обработки данные, которое вычисляет окончательную оценку скорости воздуха. Предпочтительно обеспечено наличие средств для нагревания конформной поверхности (для предотвращения обледенения канала для воздуха). Если конформная поверхность выполнена из металла или другого теплопроводного материала, нагревательные элементы могут содержать резистивные нагревательные провода, прикрепленные к нижней стороне конформной поверхности. Если конформная поверхность выполнена из пластика или другого нетеплопроводного материала, то нагревательные элементы могут содержать нагревательные элементы (например, резистивные нагревательные провода), помещенные в теплопроводный гель, который заполняет пространство, расположенное под конформной поверхностью, и который термически соединяет конформную поверхность с нагревательными элементами. Эти компоненты описаны более подробно со ссылкой на чертежи в приведенных далее подразделах.
1. Матрица емкостных датчиков дифференциального давления на основе технологии микроэлектромеханических систем (MEMS)
Система согласно предпочтительным вариантам реализации использует матрицу емкостных датчиков дифференциального давления на основе технологии микроэлектромеханических систем (MEMS) для измерения динамического давления воздуха, которое может быть использовано для вычисления скорости воздуха на основании измеренного динамического давления воздуха. Данный процесс может быть выполнен с использованием известного принципа Бернулли (иногда называемого как эффект Вентури), который может быть использован для калибровки любого индикатора скорости воздуха с тем, чтобы он показывал скорость воздуха, соответствующую динамическому давлению.
Обычные средства измерения скорости воздуха использует трубку 10 Пито, которая измеряет динамическое давление путем использования трубки 12, направленной в поток воздуха, и которая измеряет разницу между статическим давлением Ps и общим давлением Pt посредством расположенных в различных местах впускных отверстий 16 и 18 для впуска воздуха, вместе с измерением текучей среды с использованием преобразователя 14 давления, который показан на фиг. 1.
Преобразователи давления на основе технологии микроэлектромеханических систем (MEMS) генерируют выходной электрический сигнал, который некоторым образом пропорционален приложенному давлению заданной среды. Существует три основных типа измерений давления: датчики абсолютного, первоначального и дифференциального давления. Применение, раскрытое в настоящей заявке, использует один или более датчиков дифференциального давления, которые будут измерять разницу между внешним давлением потока воздуха в канале для воздуха и статическим давлением внутри конформной поверхности. Возможность обнаруживать небольшие изменения давления делает датчики дифференциального давления на основе технологии микроэлектромеханических систем (MEMS) идеальными для применений, которые обязательно должны преобразовывать небольшие разницы давлений в точные результаты измерений скорости воздуха.
Также существуют различные технологии, используемые для датчиков давления на основе технологии микроэлектромеханических систем (MEMS). Наиболее общий тип датчика давления на основе технологии микроэлектромеханических систем (MEMS) основан на пьезорезистивной технологии, которая реализует устройство измерения деформаций, которое изменяет сопротивление, когда оно открыто физическому воздействию давления, то есть усилию деформирования в ионно-имплантированном резисторе поверх диафрагмы. К сожалению, эти датчики по существу чувствительны к изменениям температуры, что делает проблемным их использование на воздушных летательных аппаратах. Другая широко используемая технология представляет собой емкостную технологию.
Емкостной датчик дифференциального давления измеряет изменения давления по отклонению деформируемой проводящей диафрагмы в результате приложенного давления. Обычно емкостной датчик дифференциального давления основан на двух проводящих электродах с небольшим щелевым отверстием между ними. Один из проводящих электродов выполнен с возможностью перемещения относительно другого вследствие изменения разницы давлений. Электрическое поле (и емкость) будет изменяться линейным образом как функция от расстояния между этими двумя электродами. При уменьшении щелевого отверстия значение емкости увеличивается до тех пор, пока они не будут касаться и замыкать накоротко конденсатор. Емкостные датчики также чувствительны к воздействиям температур, что является большим преимуществом по сравнению с их пьезоэлектрическими версиями. Согласно вариантам реализации, раскрытым в настоящей заявке, применяют емкостные датчики дифференциального давления на основе технологии микроэлектромеханических систем (MEMS).
На фиг. 2 показано сечение емкостного датчика 20 дифференциального давления на основе технологии микроэлектромеханических систем (MEMS) согласно одному варианту реализации. Данный датчик содержит кремниевую подложку (то есть основу) 22, периферийную стенку 24, которая проходит по направлению вверх от подложки 22, и деформируемую диафрагму-мембрану 30, имеющую периферийную часть, прикрепленную к периферийной стенке 24. Объем пространства, ограниченный подложкой 22, периферийной стенкой 24 и диафрагмой-мембраной 30, формирует полость 26, которая, как пояснено более подробно далее, будет заполнена воздухом при статическом давлении. Диафрагма-мембрана 30 показана в недеформированном состоянии, означающем, что внутреннее и внешнее давления (показаны на фиг. 2 посредством соответствующих совокупностей разнонаправленных стрелок), воздействующие на противолежащие стороны мембраны, являются равными.
Емкостной датчик 20 дифференциального давления на основе технологии микроэлектромеханических систем (MEMS), показанный на фиг. 2, дополнительно содержит нижний электрод 28, сформированный на верхней поверхности подложки 22, и верхний электрод 32, сформированный на внутренней (то есть нижней, как показано на фиг. 2) поверхности диафрагмы-мембраны 30. Оба электрода выполнены из электропроводящего материала. Как будет описано далее более подробно со ссылкой на фиг. 3В, во время полета воздушного летательного аппарата на внешнюю поверхность (то есть верхнюю поверхность на виде по фиг. 2) диафрагмы-мембраны 30 будет воздействовать внешнее давление, оказываемое потоком воздуха в канале, а на внутреннюю поверхность диафрагмы-мембраны 30 будет воздействовать внутреннее статическое давление, оказываемое воздухом в полости 26, причем воздух сообщается по текучей среде со статическим воздухом в пределах основной части конформной поверхности (не показана на фиг. 2, однако на фиг. 3В видна камера 36 статического давления).
Для удобства, работа емкостного датчика 20 дифференциального давления на основе технологии микроэлектромеханических систем (MEMS), показанного на фиг. 2, во время полета воздушного летательного аппарата, на котором он установлен, будет вкратце описана в настоящем документе. Когда внешнее давление, прикладываемое к внешней поверхности диафрагмы-мембраны 30, больше внутреннего давления (то есть давления внутри полости 26), прикладываемого к внутренней поверхности диафрагмы-мембраны 30, верхний электрод 32 отклоняется по направлению к нижнему электроду 28, а эффективная емкость увеличивается. Электрическое поле (и емкость) будет изменяться линейным образом как функция от расстояния между двумя электродами. При уменьшении щелевого отверстия увеличивается значение емкости. Скорость воздуха может быть оценена по меньшей мере частично на основании таких изменений емкости, причем изменения емкости представляют в свою очередь собой функцию от разницы давлений сквозь диафрагму-мембрану 30.
Датчики давления на основе технологии микроэлектромеханических систем (MEMS) калибруют путем однократного воздействия давлением с обеспечением одновременного захвата исходных данных датчика давления и точного результата измерения от высокоточного датчика, откалиброванного по стандарту Национального института стандартов и технологии (NIST). Данную последовательность повторяют для многих заданных значений давления, а захваченные данные датчиков затем пропускают через алгоритм введения поправки для определения линейного приближения выходных данных датчиков. В данном процессе рассчитывают калибровочные коэффициенты, такие как сдвиг и прирост. Система измерения скорости воздуха, раскрытая в настоящей заявке, использует выполненные за одно целое устройства, в которых эти коэффициенты хранятся во встроенным энергонезависимым запоминающим устройством для выдачи очень точного отчета об измеренном давлении, в которое были введены все поправки на внешние факторы. Эти значения давления затем могут быть переданы на устройство обработки данных о скорости воздуха, как будет подробно описано далее согласно фиг. 4 и 6.
Миниатюрные емкостные датчики, такие как датчики на основе технологии микроэлектромеханических систем (MEMS), имеют одну потенциальную проблему, которая состоит в паразитных эффектах, таких как шум окружающей среды, паразитная емкость и сопротивление утечки. Эти эффекты намного менее выражены для пьезорезистивных устройств. Эти паразитные эффекты по существу связаны с миниатюризацией в случае использования емкостного устройства. Уменьшение размеров датчиков влечет за собой уменьшение значений активной емкости до нескольких фемтофарад (фФ). Следовательно, высокие выходное полное сопротивление и чувствительность к шуму не могут быть предотвращены, а эффекты паразитной емкости становятся более доминирующими. Таким образом, регулирование (conditioning) сигнала обязательно должно быть выполнено в непосредственной близости от датчика давления, то есть в самом блоке датчиков.
2. Конструкция конформной поверхности с каналами для воздуха
Конформные датчики скорости воздуха согласно вариантам реализации, раскрытым в настоящей заявке, дополнительно содержат конструкцию частично гибкой конформной поверхности с каналами для воздуха и отверстиями для вставки емкостного датчика дифференциального давления на основе технологии микроэлектромеханических систем (MEMS), а также для впуска неподвижного воздуха. Конформная поверхность 40 выполнена из гибкого материала, такого как металл или пластик. Как показано на фиг. 5, гибкая конформная поверхность 40 конформного датчика 38 скорости воздуха (с множеством каналов для воздуха) может быть расположена на криволинейной поверхности 48 фюзеляжа самолета (то есть корпуса) с каналами для воздуха, расположенными таким образом, что поток воздуха протекает параллельно направлению канала для воздуха для обеспечения правильного измерения скорости воздуха. Гибкость конформной поверхности 40 обеспечивает возможность конформному датчику 38 скорости воздуха соответствовать по форме контуру внешней поверхности 48 фюзеляжа воздушного летательного аппарата. Когда воздух протекает в результате перемещения самолета по воздуху, некоторый воздух протекает через каждый канал для воздуха. Данный воздух затем ограничен проектной конструкцией канала для воздуха, который может быть выполнен с возможностью преобразования скорости воздуха (и, таким образом, давления воздуха) в давление в пределах измерительного диапазона емкостного датчика давления на основе технологии микроэлектромеханических систем (MEMS) в этом канале для воздуха.
На фиг. 3А показан вид сверху части канала 34 для воздуха с двумя размещенными емкостными датчиками 20 дифференциального давления на основе технологии микроэлектромеханических систем (MEMS), согласно одному варианту реализации. В альтернативном варианте один датчик давления или более двух датчиков давления могут быть размещены в каждом канале для воздуха. Стрелки на фиг. 3А отражают поток воздуха через канал 34 для воздуха, причем более жирные стрелки отражают более высокую скорость воздуха. Скорость воздуха уменьшается по параболе при увеличении расстояния от центра канала 34 для воздуха до нуля. Емкостные датчики 20 дифференциального давления на основе технологии микроэлектромеханических систем (MEMS) расположены таким образом, что максимальное дифференциальное давление находится в пределах диапазона датчика, но с минимальной турбулентностью.
На фиг. 3В показан вид в разрезе канала 34 для воздуха, показанного на фиг. 3А, причем линия разреза проведена через центр емкостного датчика 20 дифференциального давления на основе технологии микроэлектромеханических систем (MEMS). Канал 34 для воздуха сформирован в конформной поверхности. Части 40a-40d конформной поверхности показаны на фиг. 3В, причем внешние части 40а и 40d формируют часть внешней части конформной поверхности, а стеночные части 40b и 40с канала для воздуха формируют две стенки канала 34. В данном примере канал 34 для воздуха снабжен стеночными частями 40b и 40с канала для воздуха, которые ограничивают поток воздуха необходимым образом, так что, когда происходит уменьшение ширины канала 34 для воздуха, скорость воздуха увеличивается и, следовательно, давление воздуха уменьшается в конкретных заданных местах. Это используют с тем, чтобы соответствовать диапазону давлений выбранного датчика давления на основе технологии микроэлектромеханических систем (MEMS) (в данном случае диапазон датчиков на основе технологии микроэлектромеханических систем (MEMS) меньше, чем общее давление минус статическое давление при наивысшей скорости воздуха, для которой он предназначен). Каналы для воздуха могут даже использовать множество этапов уменьшений, а также могут использовать другие манипуляции с формой, такие как небольшие выступы или впадины, которые не только уменьшают скорость потока воздуха, но и также уменьшают или изменяют турбулентность воздуха с тем, чтобы помочь с согласованным измерением давления воздуха.
На фиг. 3В емкостной датчик дифференциального давления на основе технологии микроэлектромеханических систем (MEMS) показан символьным образом посредством пары горизонтальных линий, отражающих соответственно диафрагму-мембрану 30 (причем верхний электрод 32 не показан) и кремниевую подложку 22 (причем нижний электрод 28 не показан). Как видно из фиг. 3В, канал 34 для воздуха заполнен потоком воздуха, имеющим общее давление, причем поток воздуха сообщается по текучей среде с пространством над диафрагмой-мембраной 30. Полость 26 между диафрагмой-мембраной 30 и кремниевой подложкой 22 сообщается по текучей среде с соответствующей камерой 36 статического давления.
На фиг. 5А показана схема, отражающая вид сверху основанного на микроэлектромеханической системе (MEMS) конформного датчика 38 скорости воздуха с конформной поверхностью 40, имеющей три канала 34а-34с для воздуха. Во время полета воздушного летательного аппарата, с которым скреплен датчик скорости воздуха, поток воздуха при давлении P1 и скорости V1 попадает в каналы для воздуха на переднем конце датчика 38 скорости воздуха, как указано совокупностью параллельных стрелок на правой стороне по фиг. 5А. Каждый из каналов 34а-34с для воздуха имеет определенную конструкцию. Соответствующее отверстие выполнено в нижней части каждого канала для воздуха в соответствующей конструкции. Соответствующие датчики 20а-20с давления воздуха на основе технологии микроэлектромеханических систем (MEMS) установлены под этими отверстиями. В суженной части канала для воздуха, поток воздуха будет иметь давление Р2 (меньше чем P1) и скорость V2 (больше чем V1). Датчик 38 скорости воздуха дополнительно содержит одно или более входных отверстий для отбора статического давления (не видно из фиг. 5А) в заднем конце датчика скорости воздуха. Эти входные отверстия для отбора статического давления сообщаются по текучей среде с камерами 36а-36с статического давления, показанными на фиг. 6. Окружающий воздух, попадающий во входные отверстия для отбора статического давления, имеет давление Ps и скорость Vs.
На фиг. 5В показана схема, отражающая вид в разрезе конформного датчика 38 скорости воздуха на основе технологии микроэлектромеханических систем (MEMS), показанного на фиг. 5А, причем разрез выполнен через датчики 20а-20с давления на основе технологии микроэлектромеханических систем (MEMS), которые расположены под соответствующими каналами 34а-34с для воздуха. В одном варианте реализации, показанном на фиг. 5В, конформный датчик 38 скорости воздуха содержит конформную поверхность 40 и тыльную поверхность 42, соединенные посредством множества внутренних ребер 44, конструкции которых выполнены из гибкого пластикового материала. Внутренние пространства конформного датчика 38 скорости воздуха, показанного на фиг. 5В, могут быть заполнены термогелем 46 для нагревания, как пояснено подробно далее. Конформный датчик 38 скорости воздуха выполнен сужающимся на обеих сторонах, а также на его передней и задней кромках. Датчики 20а-20с давления на основе технологии микроэлектромеханических систем (MEMS), показанные на фиг. 5В, сообщаются по текучей среде с каналом 35 статического давления, который может в свою очередь сообщаться по текучей среде с множеством камер статического давления (не показаны на фиг. 5В), конструкция которых схожа с конструкцией камер 36а-36с статического давления, показанных на фиг. 6.
На фиг. 6 показаны компоненты конформного датчика скорости воздуха, имеющего конформную поверхность, выполненную из металла, согласно альтернативному варианту реализации. Верхняя часть по фиг. 6 отражает вид в разрезе (не показан в масштабе, увеличен по глубине) конформной поверхности, оборудованной множеством датчиков 20а-20с давления на основе технологии микроэлектромеханических систем (MEMS) (не показана криволинейная сужающаяся форма при установке), а в нижней части на фиг. 6 показана блок-схема, иллюстрирующая соответствующие электрические компоненты. В одном варианте реализации, показанном на фиг. 6, конформная поверхность 40 и тыльная поверхность 42 (а также множество внутренних ребер, которые не показаны) выполнены из гибкого металла. Как использовано в настоящей заявке, термин «металлы» включает чистые металлы и сплавы металлов. Конформная поверхность 40 сформирована тремя каналами 34а-34с для воздуха. На фиг. 6 разрез выполнен в плоскости, которая проходит через множество датчиков 20а-20с давления на основе технологии микроэлектромеханических систем (MEMS) в ограниченных областях соответствующих каналов 34а-34с для воздуха. Конформный датчик скорости воздуха, показанный на фиг. 6 дополнительно содержит множество камер 36а-36с статического давления, расположенных под соответствующими датчиками 20а-20с давления на основе технологии микроэлектромеханических систем (MEMS). Камеры 36а-36с статического давления сообщаются по текучей среде друг с другом посредством каналов 35а и 35b статического давления. Множество резистивных нагревательных проводов 58 прикреплены к металлической конформной поверхности 40 для целей нагревания, как описано подробно далее.
3. Устройство обработки данных для оценки скорости воздуха
Как показано на фиг. 6, аналоговые сигналы от каждого из датчиков 20а-20с дифференциального давления на основе технологии микроэлектромеханических систем (MEMS) регулируют соответствующей схемой 60 регулирования сигналов дифференциального давления на основе технологии микроэлектромеханических систем (MEMS). Отрегулированные выходные аналоговые сигналы затем преобразуют в цифровые сигналы посредством аналого-цифрового преобразователя 62. Система дополнительно содержит устройство 64 цифровой обработки данных датчиков скорости воздуха, которое обрабатывает цифровые сигналы. Данная цифровая обработка включает определение изменений электрической емкости множества датчиков 20а-20с дифференциального давления на основе технологии микроэлектромеханических систем (MEMS) и вычисление окончательной оценки скорости воздуха. Калибровочные коэффициенты, такие как сдвиг и прирост, хранятся в энергонезависимом запоминающем устройстве 66, причем калибровочные коэффициенты используются устройством 64 цифровой обработки данных датчиков скорости воздуха для выдачи очень точного отчета об измеренном давлении, которое было полностью скомпенсировано на внешние факторы. На электронную схему, показанную на фиг. 6, подают питание посредством источника 68 электропитания, который в свою очередь принимает электроэнергию от воздушного летательного аппарата.
На фиг. 4 показана блок-схема, иллюстрирующая обработку избыточных данных о скорости воздуха. Устройство цифровой обработки данных датчиков скорости воздуха берет откорректированные результаты измерений дифференциального давления P1-Pn воздуха (в аналоговой или цифровой форме) из матрицы n датчиков на основе технологии микроэлектромеханических систем (MEMS) и создает одиночную оценку скорости воздуха. Получение точной оценки требует точной привязки расчета скорости воздуха к модели на основе методов вычислительной гидродинамики (CFD), которая создает область давления в определенном месте каждого датчика на основе технологии микроэлектромеханических систем (MEMS) при конкретных условиях состояния потока воздуха. Процесс состоит в следующем:
1. Проектируют форму канала для воздуха для достижения необходимого коэффициента уменьшения давления.
2. Разрабатывают модель на основе методов вычислительной гидродинамики (CFD) (обычно с использованием уравнений Навье-Стокса или метода решеток Больцмана) канала для воздуха, которой создают оценки областей давления сквозь канал для воздуха.
3. Создают поток воздуха при определенном количестве репрезентативных скоростей и оценивают моделируемые области давления в местоположениях датчиков давления микроэлектромеханической системы (MEMS).
4. Составляют математическое преобразование Tk (Pk, ρ), которое использует результаты измерений дифференциального давления Pk в положении k и плотность ρ воздуха (которая может быть оценена различными способами, включая использование результатов измерений давления Ps и результатов измерений температуры Ts в отверстии для отбора статического давления), и создают оценки скорости воздуха на основе имитационной модели на основе методов вычислительной гидродинамики (CFD).
5. Выполняют этап калибровки с использованием измеренной скорости звука по отношению к действующему каналу для воздуха, установленному на воздушном летательном аппарате или конструкции воздушного летательного аппарата в аэродинамической трубе.
6. Модифицируют математическое преобразование Tk (Pk, ρ) для учета измеренных технических характеристик.
Устройство цифровой обработки данных датчиков скорости воздуха затем осуществляет эти преобразования по отношению к результатам измерений дифференциального давления от датчика давления на основе технологии микроэлектромеханической системы (MEMS) путем отбрасывания аномальных значений для создания более точного среднего значения окончательной оценки скорости воздуха. Подробные сведения показаны в блок-схеме по фиг. 4. Устройство цифровой обработки данных датчиков скорости воздуха принимает результаты измерения дифференциального Р1-Pn давления сначала от n-го количества датчиков давления на основе технологии микроэлектромеханических систем (MEMS) и применяет преобразования на этапе 50 для создания соответствующих оценок скорости воздуха. Эти оценки скорости воздуха выдают на переключатели 52 и, если эти переключатели оказываются открытыми, то оценки принимаются и обрабатываются программным модулем 54, который вычисляет среднее из соответствующих оценок скорости воздуха для каждой совокупности в течение последовательных интервалов времени. Результирующие средние значения выдают в качестве последовательных оценок скорости воздуха с течением времени. Состояние переключателей 52 управляется схемой 56 управления переключателями, которая выполнена с возможность удаления оценок скорости воздуха, которые слишком отстают от предыдущей средней оценки скорости воздуха, что обеспечивает фильтрацию аномальных значений.
4. Теплообмен с нагревательными элементами
Для предотвращения образования наледи на установленных с внешней стороны конформных датчиках скорости воздуха, раскрытых в настоящей заявке, может быть обеспечено нагревание этой конформной поверхности. Поскольку конструкция с конформной поверхностью выполнена гибкой для размещения установки на воздушном летательном аппарате с изменяющейся внешней кривизной на его поверхностях, причем нагревание поверхности не должно влиять на гибкость. Могут быть применены следующие варианты:
(1) Как показано на фиг. 6, может быть реализовано резистивное нагревательное устройство, которое содержит множество проводов 58, прикрепленных к нижней стороне внешних частей конформной поверхности и/или вплотную к стеночным частям канала для воздуха конформной поверхности. Такая реализация подходит, если конформная поверхность 40 выполнена из металла или некоторого другого теплопроводного материала. Нагреванием проводов 58 управляют посредством схемы 70 приведения в действие и управления нагревательным устройством с датчиками скорости воздуха. Схема управления ответственна за включение и выключение нагревательной схемы, отслеживание температуры и отправку статуса нагревательного устройства на управляющий компьютер, схема приведения в действие представляет собой высокоамперную схему, которая подает электричество непосредственно на нагревательные провода 58.
(2) Согласно фиг. 5В, нагревательный элемент (не показан на фиг. 5В) может быть размещен в теплопроводном геле 46, который заполняет пространства между конформной поверхностью 40 и тыльной поверхностью 42 (за исключением полостей, которые находятся под статическим давлением). Такая реализация подходит для нетермопроводных конформных поверхностей, таких как поверхности, выполненные из пластика.
Расчеты конструкции
Уравнение Бернулли в форме, используемой для выполнения расчетов для трубок Пито, имеет следующий вид:
где ρ представляет собой плотность воздуха при заданной высоте, V представляет собой скорость потока воздуха в заданной точке на линии потока, Pstatic представляет собой статическое давление воздуха воздушного летательного аппарата при конкретных атмосферных погодных условиях, a Ptotal представляет собой общее давление воздуха, испытываемое из-за наличия потока воздуха, вызванного перемещением воздушного летательного аппарата. В результате возведенного в квадрат коэффициента скорости, общее давление воздуха может быть существенно выше, чем статическое давление атмосферы, когда воздушный летательный аппарат совершает перемещение со скоростью 600 миль/ч (966 км/ч) или 269 метров в секунду (м/сек), а также является вполне обычным во время большей части фазы крейсерского полета самолета.
Предположим, что датчик давления на основе технологии микроэлектромеханических систем (MEMS) имеет диапазон давления от 0 до R кПа. Здесь R=0,5 торр или 3,25 кПа для некоторых очень чувствительных датчиков с разрешением в пять разрядов или R=7 кПа с разрешением в 4000Х. При использовании диапазона в 7 кПа с диапазоном скорости воздуха от 0 до 300 м/сек с разрешением в 4000Х, результат состоит в оценке разрешения для скорости воздуха (как функции от скорости воздуха), показанной на фиг. 7. Здесь конструкция канала для воздуха обязательно должна уменьшать общее давление на коэффициент в 3Х при 300 м/сек для помещения общего давления в пределы диапазона датчика давления.
Принцип работы
Принцип работы устройств, раскрытых в настоящей заявке, представляет собой модификацию эффекта Вентури для измерения потока в жидкостях и газах. Эффект Вентури основан на использовании «трубки» для ограничения потока текучей среды. По мере уменьшения площади сечения воронкообразного канала для воздуха увеличивается скорость текучей среды, а ее давление соответственно уменьшается. Это объясняется тем, что, согласно законам, обуславливающим динамику текучей среды, скорость текучей среды обязательно увеличивается по мере того, как она проходит через конструкцию с тем, чтобы соответствовать принципу непрерывности. Напротив, ее давление обязательно уменьшается с тем, чтобы соответствовать принципу преобразования механической энергии. Таким образом, любой прирост кинетической энергии текучей среды вследствие увеличения ее скорости через конструкцию нейтрализуется падением ее давления. Данный принцип используют для создания расходомеров Вентури для измерения объемного расхода. Данный эффект модифицирован только путем использования частично ограниченного потока, как показано на фиг. 3А и 5А, так что данный эффект снижен, но все еще присутствует.
В частности, практически конформная деталь должна быть снабжена каналами для воздуха, сформированными в конформной поверхности для ограничения потока воздуха поперек конформной поверхности, но не перпендикулярно ей. Данная «открытая поверхность Вентури» была исследована в других контекстах, таких как с использованием ограниченных строительных конструкций. Путем создания практически конформной поверхности датчика скорости воздуха с ограничительными формами канала, которые показаны на фиг. 3А и 5А, можно увеличить коэффициент К усиления скорости воздуха до установленного значения. Это может быть выполнено с использованием одного или более расположенных последовательно спроектированных ограничений канала. Путем увеличения расхода воздуха, давление может быть уменьшено на тот же самый коэффициент. Таким образом, можно достигнуть (например) уменьшения в 3Х, упомянутого в примере, описанном выше. На основании результатов измерений в каналах для воздуха, может быть оценена окончательная скорость воздуха. Далее это пояснено математическим образом.
При использовании обозначений по фиг. 5А для скоростей и давления потоков воздуха, согласно принципу Бернулли
Таким образом, необходимая скорость V1 воздуха связана с более высокой ограниченной скоростью V2 и с обратно пропорциональным им давлениям, наряду с атмосферной плотностью ρ. Теперь атмосферная плотность ρ может быть оценена с использованием других результатов измерения высоты и температуры или измерена с использованием непосредственно давления Ps и температуры Ts в отверстии для воздуха статического давления и соотношения закона идеального газа
причем Rair представляет собой удельную газовую постоянную для воздуха. Кроме того, Р2 и Ps связаны принципом Бернулли как
Таким образом, V2 можно рассчитать как
Путем встраивания коэффициента усиления скорости в канал поверхности датчика скорости воздуха K=V2/V1, получают окончательную оценку для V1.
Эти расчеты предназначены для идеальных несжимаемых газов. Для учета дополнительных нелинейных эффектов от обоих из результатов моделирования на основе методов вычислительной гидродинамики (CFD) и сжатия, а также реальных эффектов турбулентности, обычная линейная связь, заданная постоянной К, может быть заменена преобразованием Tk (Pk, ρ) для каждого положения датчика.
Таким образом, идея конформного датчика скорости воздуха на основе технологии микроэлектромеханических систем (MEMS) была раскрыта для решения проблем обледенения и закупоривания, присущих стандартным датчикам скорости воздуха в трубке Пито. Данный конформный датчик скорости воздуха на основе микроэлектромеханических систем (MEMS) проводит поток воздуха поверх своей снабженной каналом поверхности и измеряет относительное давление воздуха между воздухом, протекающим в канале, и статическим давлением под каналом для оценки скорости воздуха воздушного летательного аппарата. Конструкция с конформной поверхностью выполнена из гибкого материала и может быть прикреплена к борту или дну воздушного летательного аппарата как дополнительный или основной датчик скорости воздуха.
Несмотря на то, что датчики скорости воздуха были описаны в отношении определенных различных вариантов реализации, специалистам в области техники будет понятно, что могут быть осуществлены различные изменения, а эквиваленты могут быть использованы вместо элементов этих вариантов реализации без выхода за рамки объема идей настоящей заявки. Кроме того, многие модификации могут быть осуществлены для адаптации идей настоящей заявки к конкретному решению без выхода за рамки их объема. Таким образом, предполагается, что пункты формулы не ограничены конкретными вариантами реализации, описанными в настоящей заявке.
Пункты формулы изобретения на способ, изложенные в настоящей заявке, не следует трактовать так, что они требуют выполнения изложенных в них операций в алфавитном порядке (алфавитный порядок использован в пунктах формулы исключительно в целях обращения к ранее изложенным операциям) или в порядке, в котором они изложены. Также их не следует трактовать так, что они исключают две или более операций, выполняемые одновременно или поочередно.
Группа изобретений относится к датчикам для измерения скорости воздушного летательного аппарата по отношению к окружающей его воздушной массе. Сущность заключается в том, что устройство для измерения скорости воздуха содержит гибкую конструкцию, имеющую внешнюю поверхность с первым открытым каналом для воздуха, имеющим нижнюю часть с первым отверстием, и первый датчик давления, установленный в гибкой конструкции в положении с нижней стороны и сообщающийся по текучей среде с первым отверстием. Технический результат – исключение обледенения или закупоривания трубок Пито. 3 н. и 20 з.п. ф-лы, 10 ил.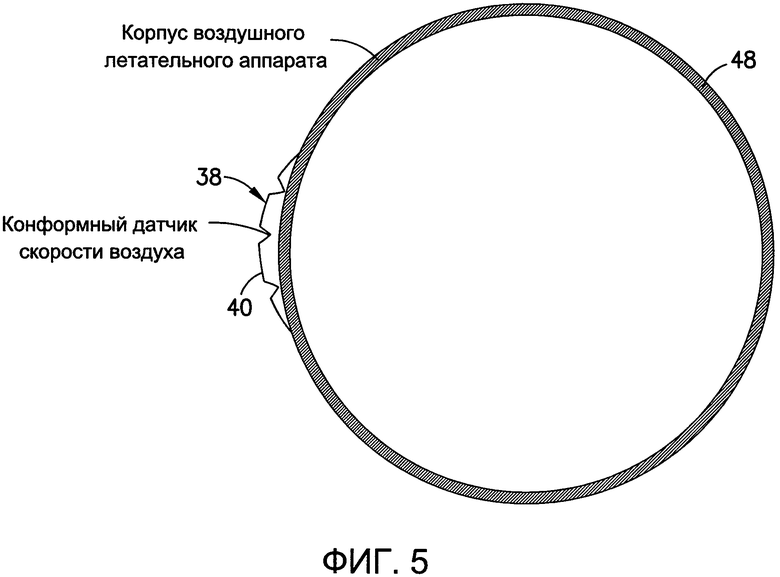
1. Устройство для измерения скорости воздуха, содержащее:
гибкую конструкцию, имеющую внешнюю поверхность с первым открытым каналом для воздуха, имеющим нижнюю часть с первым отверстием, и
первый датчик давления, установленный в гибкой конструкции в положении с нижней стороны и сообщающийся по текучей среде с первым отверстием.
2. Устройство по п. 1, в котором гибкая конструкция содержит входное отверстие для отбора статического давления и камеру статического давления, сообщающуюся по текучей среде с указанным входным отверстием, причем первый датчик давления сообщается по текучей среде с камерой статического давления.
3. Устройство по п. 1, в котором первый датчик давления представляет собой емкостной датчик дифференциального давления, содержащий микроэлектромеханическую систему.
4. Устройство по п. 1, в котором первый датчик давления дополнительно содержит деформируемую диафрагму-мембрану, имеющую сформированный на ней первый электрод, и подложку, имеющую сформированный на ней второй электрод, причем первый и второй электроды отделены друг от друга на расстояние, которое представляет собой функцию от отклонения деформируемой диафрагмы-мембраны.
5. Устройство по п. 1, в котором первый открытый канал для воздуха содержит суженную часть, причем первое отверстие расположено в нижней части суженной части первого открытого канала для воздуха.
6. Устройство по п. 1, в котором внешняя поверхность гибкой конструкции имеет второй открытый канал для воздуха, имеющий нижнюю часть со вторым отверстием, а указанное устройство дополнительно содержит второй датчик давления, установленный в гибкой конструкции в положении с нижней стороны и сообщающийся по текучей среде со вторым отверстием.
7. Устройство по п. 6, дополнительно содержащее:
первую схему регулирования сигналов, присоединенную для регулирования выходного аналогового сигнала первым датчиком давления,
первый аналого-цифровой преобразователь, присоединенный для преобразования отрегулированного выходного аналогового сигнала первой схемой регулирования сигналов в первый цифровой сигнал,
вторую схему регулирования сигналов, присоединенную для регулирования выходного аналогового сигнала вторым датчиком давления,
второй аналого-цифровой преобразователь, присоединенный для преобразования отрегулированного выходного аналогового сигнала второй схемой регулирования сигналов во второй цифровой сигнал, и
устройство обработки данных, запрограммированное для расчета оценки скорости воздуха с учетом первого и второго цифровых сигналов.
8. Устройство по п. 1, дополнительно содержащее нагревательный элемент, который термически соединен с внешней поверхностью гибкой конструкции.
9. Устройство по п. 8, дополнительно содержащее теплопроводный гель, посредством которого нагревательный элемент термически соединен с внешней поверхностью гибкой конструкции.
10. Устройство по п. 1, в котором внешняя поверхность гибкой конструкции выполнена из металла или пластика.
11. Система для измерения скорости воздуха, содержащая самолет, имеющий внешнюю поверхность, и конформный датчик скорости воздуха, прикрепленный к внешней поверхности указанного самолета и содержащий:
гибкую конструкцию, имеющую внешнюю поверхность со сформированными в ней первым и вторым открытыми каналами для воздуха,
первый емкостной датчик дифференциального давления, установленный в гибкой конструкции в положении с нижней стороны и сообщающийся по текучей среде с первым открытым каналом для воздуха,
второй емкостной датчик дифференциального давления, установленный в гибкой конструкции в положении с нижней стороны и сообщающийся по текучей среде со вторым открытым каналом для воздуха, и
электронную схему, которая запрограммирована или выполнена с возможностью оценки скорости воздуха указанного воздушного летательного аппарата по меньшей мере частично на основании выходных сигналов посредством первого и второго емкостных датчиков дифференциального давления.
12 Система по п. 11, в которой гибкая конструкция содержит входное отверстие для отбора статического давления, а также первую и вторую камеры статического давления, сообщающиеся по текучей среде с указанным входным отверстием, причем первый датчик давления расположен между первым открытым каналом для воздуха и первой камерой статического давления, а второй датчик давления расположен между вторым открытым каналом для воздуха и второй камерой статического давления.
13. Система по п. 11, в которой каждый из первого и второго емкостных датчиков дифференциального давления содержит деформируемую диафрагму-мембрану, имеющую сформированный на ней первый электрод, и подложку, имеющую сформированный на ней второй электрод, причем первый и второй электроды отделены друг от друга на расстояние, которое представляет собой функцию от отклонения деформируемой диафрагмы-мембраны.
14. Система по п. 11, в которой каждый из первого и второго открытых каналов для воздуха содержит соответствующую суженную часть, причем первый емкостной датчик дифференциального давления расположен под суженной частью первого открытого канала для воздуха, а второй емкостной датчик дифференциального давления расположен под суженной частью второго открытого канала для воздуха.
15. Система по п. 11, в которой электронная схема содержит:
первую схему регулирования сигналов, присоединенную для регулирования выходного аналогового сигнала первым емкостным датчиком дифференциального давления,
первый аналого-цифровой преобразователь, присоединенный для преобразования отрегулированного выходного аналогового сигнала первой схемой регулирования сигналов в первый цифровой сигнал,
вторую схему регулирования сигналов, присоединенную для регулирования выходного аналогового сигнала вторым емкостным датчиком дифференциального давления,
второй аналого-цифровой преобразователь, присоединенный для преобразования отрегулированного выходного аналогового сигнала второй схемой регулирования сигналов во второй цифровой сигнал, и
устройство обработки данных, запрограммированное для расчета оценки скорости воздуха с учетом первого и второго цифровых сигналов.
16. Система по п. 11, дополнительно содержащая нагревательный элемент, который термически соединен с внешней поверхностью гибкой конструкции.
17. Система по п. 16, дополнительно содержащая теплопроводный гель, посредством которого нагревательный элемент термически соединен с внешней поверхностью гибкой конструкции.
18. Система по п. 11, в которой внешняя поверхность гибкой конструкции выполнена из металла или пластика.
19. Способ оценки скорости летательного аппарата или судна, выполненного с возможностью перемещения через текучую среду, согласно которому:
закрепляют на внешней поверхности летательного аппарата или судна гибкую конструкцию, которая имеет внешнюю поверхность со сформированными в ней одним или более открытыми каналами для воздуха,
передают сигналы от одного или более датчиков дифференциального давления, установленных под суженными частями указанных одного или более открытых каналов для воздуха, и
рассчитывают скорость летательного аппарата или судна относительно окружающей текучей среды во время его перемещения на основании плотности текучей среды и сигналов, передаваемых указанным одним или более датчиками дифференциального давления.
20. Способ по п. 19, согласно которому каждый сигнал, передаваемый каждым датчиком дифференциального давления, отражает разницу между статическим давлением под соответствующим открытым каналом для воздуха и общим давлением в том же открытом канале для воздуха.
21. Способ по п. 19, дополнительно содержащий регулирование аналоговых сигналов, передаваемых датчиками дифференциального давления, и преобразование этих аналоговых сигналов в цифровые сигналы.
22. Способ по п. 21, в котором этап расчета содержит: преобразование цифровых значений в соответствующие оценки скорости частично на основании плотности текучей среды, расчет оценки средней скорости на основании указанных оценок скорости и фильтрацию последующих оценок скорости, которые отличаются от оценки средней скорости более чем на конкретное пороговое значение.
23. Способ по п. 19, в котором текучая среда представляет собой воздух, а летательный аппарат или судно представляет собой воздушный летательный аппарат.
| FR 2892813 A1, 04.05.2007 | |||
| US 6101429 A, 08.08.2000 | |||
| US 3364741 A, 23.01.1968 | |||
| Измеритель скорости потока газа или жидкости | 1990 |
|
SU1820333A1 |

