Изобретение относится к векторному управлению асинхронным электродвигателем, в частности к устройству и способу управления асинхронным двигателем, обеспечивающим возможность осуществления векторного управления даже в тех случаях, когда при высоких скоростях управление двигателем путем изменения электрического напряжения невозможно.
Векторное управление асинхронным электродвигателем, используемым в качестве тягового двигателя на электропоездах, описано в выложенной заявке на японский патент Hei 5-83976. В скоростных электропоездах для уменьшения потерь при переключении инвертора или для максимально эффективного использования напряжения источника питания постоянного тока (ПТ) для управления двигателем вместо широтно-импульсной модуляции (ШИМ) применяется моноимпульсная модуляция. Однако в обычном моноимпульсном режиме нельзя регулировать величину напряжения, а сделать это можно путем векторного управления, которое описано в публикации тридцать третьего Национального симпозиума по железнодорожной кибернетике "A vehicle drive system where a vector control is adopted", стр. 247-250 (ноябрь 1996).
Устройство для векторного управления, предложенное в указанной выше выложенной заявке на японский патент Hei 5-83976, имеет две схемы управления токами, которые для векторного управления корректируют два сигнала команд на изменение напряжения в соответствии с разницей между величиной команды на изменение намагничивающей составляющей тока и его фактически измеренной величиной и в соответствии с разницей между величиной команды на изменение моментообразующей составляющей тока статора и его фактически измеренной величиной, а также имеет третью схему управления током, предназначенную для преобразования частоты скольжения; при этом, однако, из-за усложнения конструкции устройства и выполнения команд с помощью микрокомпьютера возникает проблема, связанная с длительностью выполнения соответствующих команд. Далее, как сказано в приведенном выше документе "A vehicle drive system where a vector control is adopted", для векторного управления системой привода транспортного средства в моноимпульсном режиме в ней необходимо обеспечить корректировку магнитного потока, и, в частности, добавить в нее обратную связь для управления слабым магнитным полем. Кроме того, в обоих известных способах систему управления необходимо изменять при переходе от моноимпульсного режима модуляции к любому другому режиму.
Помимо двух упомянутых выше обычных способов управления, существует и еще один способ, описанный в выложенной заявке на японский патент Hei 2-32788. В описанном в этой выложенной заявке устройстве для векторного управления, схема которого показана на фиг. 16, в ответ на изменение каждой из компонент - намагничивающей составляющей тока и моментообразующей составляющей тока статора - вырабатывается команда на изменение напряжения, причем для формирования команды на изменение тока якоря в этом устройстве имеется система управления током, вырабатывающая команду на изменение основной частоты и ее согласования с фактической частотой, а формирование упомянутой выше команды на изменение напряжения выполняется в соответствии с полученной командой на изменение основной частоты.
Однако при векторном управлении, описанном в упомянутой выше выложенной заявке, возникает серьезная проблема, связанная с заменой ШИМ-модуляции моноимпульсной модуляцией и заключающаяся в том, что без регулирования напряжения векторное управление становится невозможным. Но решение этой проблемы остается открытым.
Задачей настоящего изобретения является создание более простого по конструкции устройства и более простого в осуществлении способа векторного управления асинхронным электродвигателем, в котором для максимально эффективного использования источника питания ПТ ШИМ-инвертора ШИМ-модуляция заменена моноимпульсной модуляцией и с помощью которого может осуществляться непрерывное векторное управление двигателем во всем диапазоне от низких до высоких скоростей с одним и тем же управляющим устройством.
Поставленная задача решается с помощью предложенного устройства управления асинхронным электродвигателем, содержащего инвертор, преобразующий постоянный ток в переменный с регулированием частоты при регулируемом напряжении посредством схемы формирования сигналов управления инвертора с широтно-импульсной модуляцией, и преобразователь полярных координат для регулирования выходного напряжения инвертора путем изменения глубины модуляции по команде на изменение выходного напряжения, которое осуществляется по команде на изменение намагничивающей составляющей тока в первичной обмотке тока асинхронного двигателя, на который подается напряжение от инвертора, и по команде на изменение компоненты напряжения, которые формируются схемой формирования команд на изменение напряжения в соответствии с упомянутыми соответствующими компонентами и выполняются в соответствии с командой на изменение моментообразующей составляющей тока статора.
Согласно изобретению в устройстве имеется преобразователь координат для измерения моментообразующей составляющей тока статора в соответствии с током в первичной обмотке асинхронного двигателя, регулятор тока для коррекции отклонения величины измеренной моментообразующей составляющей тока статора от величины соответствующего сигнала команды и формирования скорректированного сигнала команды на изменение моментообразующей составляющей тока статора, схема формирования команд на изменение угловой частоты скольжения для коррекции выходной частоты инвертора в соответствии со скорректированной величиной сигнала команды на изменение моментообразующей составляющей тока статора, и схема формирования команд на изменение глубины модуляции для ограничения величины глубины модуляции предварительно заданной большей величиной ограничения или произвольной величиной, при этом в течение времени, когда величина глубины модуляции ограничена предварительно заданной величиной ограничения, генератор команд на изменение тока генерирует команду на изменение намагничивающей составляющей тока, соответствующей предварительно заданной постоянной величине, и команду на изменение моментообразующей составляющей тока статора.
Предпочтительно глубину модуляции нормировать в соответствии с величиной, при которой измеряется напряжение VFC постоянного тока.
Предпочтительно также, что предварительно заданная величина ограничения глубины модуляции определяется максимально возможным выходным напряжением указанного инвертора, которое определяется в соответствии с напряжением постоянного тока.
Предпочтительно также произвольно заданную величину ограничения глубины модуляции выбрать так, чтобы количество импульсов на полупериоде фазы выходного напряжения инвертора было равно 1.
Задача решается и с помощью предложенного способа управления асинхронным электродвигателем, в котором асинхронный двигатель управляется путем регулирования выходного напряжения инвертора, преобразующего постоянный ток в переменный с регулированием частоты при регулируемом напряжении и регулированием частоты при постоянном напряжении, за счет изменения глубины модуляции, которая выполняется по команде на изменение намагничивающей составляющей тока в первичной обмотке асинхронного двигателя, на который подается напряжение от инвертора, и по команде на изменение компоненты напряжения, которые формируются в соответствии с упомянутыми соответствующими компонентами и выполняются в соответствии с командой на изменение моментообразующей составляющей тока статора. Согласно изобретению после перехода от управления в режиме регулирования частоты при регулируемом напряжении к управлению в режиме регулирования частоты при постоянном напряжении глубину модуляции ограничивают предварительно заданной величиной и при увеличении выходной частоты инвертора величина сигнала команды на изменение намагничивающей составляющей тока увеличивается при условии, что ток поддерживают постоянной величины.
Ниже изобретение более подробно поясняется описанием вариантов выполнения со ссылкой на чертежи, которые показывают:
на фиг. 1 - блок-схему устройства управления, выполненную по одному из вариантов настоящего изобретения,
на фиг. 2 - подробное изображение показанной на фиг. 1 схемы изменения глубины модуляции,
на фиг. 3 - пример, иллюстрирующий предложенный в настоящем изобретении способ управления, и
на фиг. 4 - пример, иллюстрирующий изменение крутящего момента двигателя, управляемого предложенным в настоящем изобретении способом.
Ниже со ссылками на фиг. 1 рассмотрен один из вариантов выполнения настоящего изобретения. Как показано на этом чертеже, постоянный ток (ПТ), пульсации которого сглаживаются выполненным в виде конденсатора фильтром 13, поступает от источника питания 11 ПТ на инвертор 1 с широтно-импульсной модуляцией (ШИМ), являющийся преобразователем электрической мощности.
ШИМ-инвертор 1 преобразует напряжение ПТ в трехфазное напряжение переменного тока, которое подается на асинхронный двигатель 2. Такой асинхронный двигатель 2 можно использовать в качестве тягового двигателя для привода электровоза.
Генератор 3 команд на изменение тока генерирует сигнал Id* команды на изменение намагничивающей составляющей тока и сигнал Iq* команды на изменение моментообразующей составляющей тока статора.
Регулятор 4 тока генерирует сигнал Iq** команды на изменение моментообразующей составляющей тока статора, скорректированный в соответствии с отклонением величины сигнала команды Iq* на изменение тока статора от величины сигнала Iq измеренного тока статора, являющегося выходным сигналом преобразователя 5 координат, и этот сигнал Iq** команды подается на входы схемы 6 выполнения команд на изменение напряжения и схемы 7 выполнения команд на изменение угловой частоты скольжения.
Схема 7 выполнения команд на изменение угловой частоты скольжения вырабатывает сигнал  команды на изменение угловой частоты скольжения в соответствии с величинами сигнала Id* команды на изменение намагничивающей составляющей тока и сигнала Iq** команды на изменение моментообразующей составляющей тока статора.
команды на изменение угловой частоты скольжения в соответствии с величинами сигнала Id* команды на изменение намагничивающей составляющей тока и сигнала Iq** команды на изменение моментообразующей составляющей тока статора.
Схема 6 выполнения команд на изменение напряжения вырабатывает необходимые для системы с вращающимся магнитным полем две компоненты напряжения Vd* и Vq*, подаваемого на асинхронный двигатель 2, в соответствии с откорректированной величиной сигнала Iq** команды на изменение моментообразующей составляющей тока статора, и сигналом  команды на изменение основной угловой частоты скольжения, о которой будет сказано ниже, и подает эти две компоненты напряжения на преобразователь 8 полярных координат.
команды на изменение основной угловой частоты скольжения, о которой будет сказано ниже, и подает эти две компоненты напряжения на преобразователь 8 полярных координат.
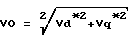
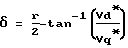
Преобразователь 8 полярных координат преобразует векторы напряжения, выраженные величинами Vd* и Vq*, в амплитуду V0 и фазу δ вектора напряжения.
С другой стороны, скорость  асинхронного двигателя, измеряемая датчиком 16 скорости, суммируется на сумматоре 17 с величиной сигнала
асинхронного двигателя, измеряемая датчиком 16 скорости, суммируется на сумматоре 17 с величиной сигнала  команды на изменение угловой частоты скольжения, являющегося выходным сигналом схемы 7 выполнения команд на изменение угловой частоты скольжения, и при этом генерируется сигнал
команды на изменение угловой частоты скольжения, являющегося выходным сигналом схемы 7 выполнения команд на изменение угловой частоты скольжения, и при этом генерируется сигнал  команды на изменение основной угловой частоты. Сигнал
команды на изменение основной угловой частоты. Сигнал  команды на изменение основной угловой частоты подается на интегратор 18 и в схему 6 исполнения команд на изменение напряжения.
команды на изменение основной угловой частоты подается на интегратор 18 и в схему 6 исполнения команд на изменение напряжения.
Интегратор 18 интегрирует сигнал  команды на изменение основной угловой частоты и вырабатывает сигнал Θ в стандартной системе координат.
команды на изменение основной угловой частоты и вырабатывает сигнал Θ в стандартной системе координат.
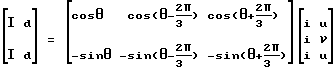
Преобразователь 5 координат, на вход которого поступают измеряемые датчиками 15u, 15v и 15w токов выходные токи iu, iv и iw ШИМ-инвертора 1, преобразует последние в соответствии с сигналом Θ в компоненту Id намагничивающей составляющей тока в системе координат вращающегося магнитного поля и в компоненту Iq моментообразующей составляющей тока статора, которая подается в регулятор 4 тока.
Сумматор 19 суммирует сигнал Θ в стандартной системе координат, поступающий с выхода интегратора 18, с фазой δ вектора напряжения, которая подается с выхода преобразователя 8 полярных координат, и генерирует выходной сигнал Θ′.
Схема 10 выполнения команд на изменение скорости модуляции вырабатывает значение глубины Vc модуляции в соответствии с сигналом от датчика 14 напряжения, определяющего величину напряжения VFC питающего преобразователь электрической мощности напряжения ПТ, путем ограничения амплитуды V0 вектора напряжения, являющегося выходным сигналом преобразователя 8 полярных координат, величиной, не превышающей максимально возможное выходное напряжение преобразователя электрической мощности.
Схема 9 генерирует поступающие затем на ШИМ-инвертор 1 импульсные ШИМ-сигналы Su, Sv и Sw типа "включено"/"выключено" в соответствии с величинами сигнала Vc, приходящего на нее с выхода схемы 10 глубины модуляции, и сигнала Θ′ с выхода сумматора 19.
Ниже работа упомянутых выше устройств рассмотрена более подробно.
Преобразователь 5 координат генерирует, в частности, компоненты Id намагничивающей составляющей тока и Iq моментообразующей составляющей тока статора из сигнала Θ в стандартной системе координат и выходных токов iu, iv и iw инвертора в соответствии со следующей формулой (1).
В качестве регулятора 4 тока может быть использован, например, пропорциональный и интегральный регулятор. Работа такого регулятора описывается приведенной ниже формулой (2). По этой формуле, в соответствии с отклонением величины Iq* сигнала команды на изменение моментообразующей составляющей тока статора от величины Iq сигнала измеренного тока статора, генерируется сигнал Iq** команды на изменение моментообразующей составляющей тока статора.
 .
.
В этой формуле К1 означает коэффициент пропорциональности, К2 означает коэффициент интегрирования, а s означает оператор Лапласа.
Следующая формула (3) описывает один из примеров работы схемы 6 выполнения команд на изменение напряжения.
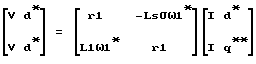
В этой формуле r1 означает активное сопротивление первичной обмотки асинхронного двигателя 2, Lsσ означает индуктивность рассеяния и L1 означает индуктивность первичной обмотки.
Следующая формула (4) описывает один из примеров работы схемы 7 выполнения команд на изменение угловой частоты скольжения.
В этой формуле r2 означает активное сопротивление вторичной обмотки асинхронного двигателя 2, а М означает взаимную индуктивность.

Работа преобразователя 8 полярных координат описывается формулами (5) и (6).
На фиг. 2 показан один из примеров работы схемы 10 выполнения команд на изменение глубины модуляции. Сигнал V0 от преобразователя 8 полярных координат делится делителем 201 на величину VCF напряжения на фильтрующем конденсаторе и полученный сигнал нормируется умножителем 202 и в виде сигнала Vc' глубины модуляции подается на ограничитель 203. Ограничитель 203 предназначен для того, чтобы выходной сигнал глубины модуляции (команда на изменение напряжения), полученный в соответствии с входным сигналом Vc' глубины модуляции (команда на изменение напряжения), не превышал предварительно заданной величины. Работа схемы, показанной на фиг. 2, описывается следующей формулой (7).
В соответствии с этой формулой глубина Vc модуляции нормируется таким образом, чтобы напряжение в моноимпульсном режиме при максимальном выходном напряжении ШИМ-инвертора было равно 1. Функция min ( ) представляет собой функцию, от которой берется минимальное значение, и если результат вычислений превышает 1, то значение Vc ограничивается величиной, равной 1. В соответствии с формулой (7) максимальное значение V0max величины V0 определяется формулой (8).
В показанной на фиг. 1 и работающей, как описано выше, в соответствии с формулами (1)-(7) схеме управления можно осуществить надежное управление двигателем в диапазоне от низких до высоких скоростей при переходе для максимально эффективного использования ПТ ШИМ-инвертора 1 с режима ШИМ на моноимпульсный режим.
Ниже приводится подробное описание работы этой схемы.
Сначала рассмотрена работа схемы при низких скоростях, когда величина команд на изменение напряжения меньше максимально возможного выходного напряжения преобразователя электрической мощности, которое определяется напряжением ПТ источника питания. Поскольку выходной сигнал V0 преобразователя полярных координат меньше напряжения V0max, которое ограничивается схемой 10 выполнения команд на изменение глубины модуляции, выполняется неравенство Vc<1. В этом случае при идеальных условиях, когда нет ошибки в выходном напряжении ШИМ-инвертора 1 и параметры асинхронного двигателя 2 соответствуют параметрам, используемым в схеме 6 расчета команды на изменение напряжения и в схеме 7 расчета команды на изменение угловой скорости скольжения, выходное напряжение ШИМ-инвертора 1 соответствует команде на изменение напряжения. В результате, выходные сигналы Id* и Iq* генератора 3 команд на изменение тока полностью совпадают с выходными сигналами Id и Iq преобразователя полярных координат, т. е. осуществляется векторное управление. В действительности же из-за ошибок в выходном напряжении ШИМ-инвертора 1 и изменений параметров асинхронного двигателя 2 возникает несоответствие между выходными сигналами Id* и Iq* и выходными сигналами Id и Iq, однако в этом случае осуществляется регулирование сигнала Iq, который приводится в соответствие с сигналом Iq*.
Например, если сопротивление r2 вторичной обмотки асинхронного двигателя 2 больше значения r2, использованного в схеме 7 расчета угловой скорости скольжения, то из-за того, что величина сигнала команды  на изменение угловой скорости скольжения на выходе из вычисляющей ее схемы 7 становится меньше предыдущего значения, то ток асинхронного двигателя 2 уменьшается, и возникает несоответствие между выходными сигналами Iq и Iq*. Для устранения этого несоответствия регулятор 4 тока увеличивает выходной сигнал Iq** . Соответственно, поскольку величина сигнала
на изменение угловой скорости скольжения на выходе из вычисляющей ее схемы 7 становится меньше предыдущего значения, то ток асинхронного двигателя 2 уменьшается, и возникает несоответствие между выходными сигналами Iq и Iq*. Для устранения этого несоответствия регулятор 4 тока увеличивает выходной сигнал Iq** . Соответственно, поскольку величина сигнала  команды на изменение угловой частоты скольжения увеличивается, ошибка, связанная с изменениями параметров двигателя, корректируется даже при ее возрастании и благодаря действию регулятора 4 тока обеспечивается стабильное векторное управление.
команды на изменение угловой частоты скольжения увеличивается, ошибка, связанная с изменениями параметров двигателя, корректируется даже при ее возрастании и благодаря действию регулятора 4 тока обеспечивается стабильное векторное управление.
Далее рассматривается работа системы при высоких скоростях, когда необходимое для питания асинхронного двигателя напряжение превышает максимально возможное выходное напряжение преобразователя электрической мощности (режим ШИМ становится моноимпульсным). Даже при идеальных условиях и отсутствии ошибок, связанных с параметрами асинхронного двигателя, когда амплитуда V0 вектора команды на изменение напряжения на выходе из преобразователя 8 полярных координат становится больше напряжения V0max, равного максимальному выходному напряжению ШИМ-инвертора 1, возникает несоответствие между величинами команд на изменение напряжения и выходными напряжениями. В результате этого возникает несоответствие между выходными сигналами Id* и Iq* генератора 3 команд на изменение тока и сигналами Id и Iq преобразователя 5 полярных координат.
Дополнительным средством решения проблем, возникающих в описанных выше условиях, является схема 10 расчета глубины модуляции.
Схема 10 расчета глубины модуляции, как показано на фиг. 2, при большой величине сигнала Vc' команды на изменение напряжения ограничивает выходное напряжение величиной V0max, и это ограниченное по величине выходное напряжение является глубиной модуляции Vc инвертора (командой на изменение выходного напряжения).
В обычном способе векторного управления необходимо иметь обратную связь по напряжению, соответствующему разности между Vc' и V0max. Например, в упомянутом выше документе "A vehicle drive system where a vector control is adopted", такая обратная связь используется для уменьшения величины сигнала команды Id* на изменение намагничивающей составляющей тока, генерируемого генератором 3 команд на изменение тока. (Далее в описании предлагаемого в настоящем изобретении способа векторного управления, которое, как сказано выше, осуществляется путем регулирования величины Id*, величина сигнала команды на изменение намагничивающей составляющей тока обозначается как Id**).
Отличительной особенностью настоящего изобретения является то, что предлагаемый в нем способ векторного управления осуществляется без упомянутой выше обратной связи. Основные принципы такого управления подробно рассмотрены ниже.
Основным назначением регулятора 4 тока, показанного на фиг. 1, при низких скоростях является компенсация искажений, связанных с изменением параметров; при высоких скоростях этот регулятор компенсирует ошибку, возникающую при несовпадении выходных сигналов Iq* и Iq, которое связано с упомянутым выше несовпадением напряжений.
Например, если напряжение Vc' превышает напряжение V0max, то в зависимости от разности между ними выходной сигнал Iq регулятора 4 тока соответствующим образом увеличивается по сравнению с выходным сигналом Iq*. В результате, в процессе управления создается равновесие, и отношение Iq**/Id*, где Iq** представляет собой выходной сигнал регулятора 4 тока и Id* представляет собой выходной сигнал генератора 3 команд на изменение тока, становится, как при обычном векторном управлении, равным отношению Iq/Id. При этом величина сигнала  команды на изменение угловой частоты скольжения на выходе схемы 7 расчета угловой частоты, как следует из формулы (4), становится равной величине сигнала, по которому происходит процесс векторного управления, и, как следствие этого, равной сигналу Θ в стандартной системе координат, который генерируется сумматором 17 и интегратором 18.
команды на изменение угловой частоты скольжения на выходе схемы 7 расчета угловой частоты, как следует из формулы (4), становится равной величине сигнала, по которому происходит процесс векторного управления, и, как следствие этого, равной сигналу Θ в стандартной системе координат, который генерируется сумматором 17 и интегратором 18.
Аналогичным образом во избежание изменения скорости  асинхронного двигателя 2 до достижения равновесия в процессе выполнения управления, определяется постоянная времени регулятора 4 тока, при которой отношение Vq*/Vd*, где Vq* и Vd* представляют собой выходные напряжения схемы 6 расчета команд на изменение токов, в соответствии с формулой (3) не изменяется.
асинхронного двигателя 2 до достижения равновесия в процессе выполнения управления, определяется постоянная времени регулятора 4 тока, при которой отношение Vq*/Vd*, где Vq* и Vd* представляют собой выходные напряжения схемы 6 расчета команд на изменение токов, в соответствии с формулой (3) не изменяется.
При этом, как следует из формулы (6), величина выходного сигнала δ преобразователя 8 полярных координат становится равной величине сигнала при обычном векторном управлении. В результате, поскольку сигнал Θ′, генерируемый в сумматоре 19, становится равным Θ и на асинхронный двигатель 2 подается такое же напряжение, как при обычном векторном управлении, то в идеальном случае выходные сигналы преобразователя 5 полярных координат будут равны величинам Id* и Iq*, соответствующим обычному векторному управлению. Так как регулятор 4 тока содержит интегрирующее звено, то даже когда входной сигнал Iq* становится равным величине Iq**, условие равновесия, которое определяется выходным сигналом Iq**, достигается даже в том случае, если он имеет величину, большую величины выходного сигнала Iq*.
Другими словами, даже когда выходной сигнал V0 преобразователя 8 полярных координат превышает максимальное выходное напряжение V0max ШИМ-инвертора 1, а генератор 3 команд на изменение тока не отрегулирован, то в соответствии с настоящим изобретением ситуация, благодаря работе регулятора 4 тока, становится полностью эквивалентной ситуации, когда осуществляется векторное управление, при котором величина сигнала команды на изменение намагничивающей составляющей тока снижается автоматически. Формулируя эту мысль иначе, можно сказать, что при максимальном выходном напряжении ШИМ-инвертора автоматическое управление двигателем осуществляется слабым магнитным полем. Кроме того, при таком способе управления влияние изменений напряжения ПТ источника питания корректируется автоматически, благодаря действию описанной выше схемы управления, и ток Iq статора в обычных условиях всегда поддерживается равным величине сигнала Iq* команды на изменение моментообразующей составляющей тока статора.
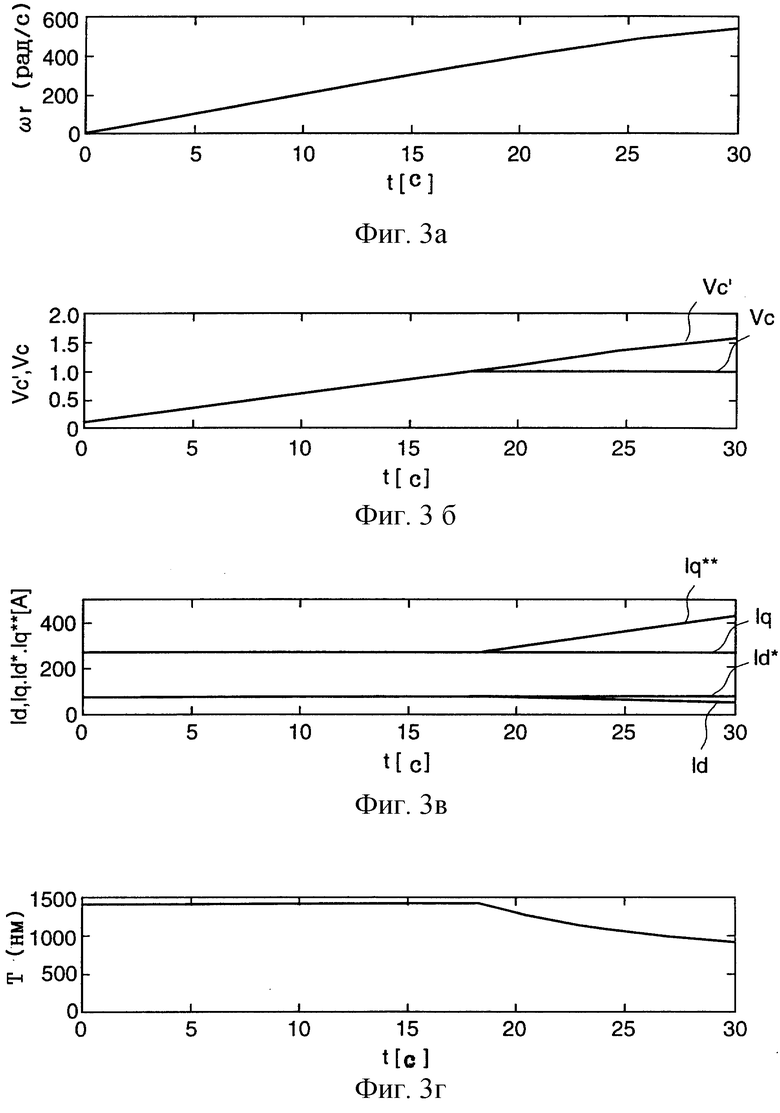
На фиг. 3 показаны графики, иллюстрирующие работу системы управления от момента остановки асинхронного двигателя до момента, когда выходное напряжение инвертора достигает максимального значения и затем остается постоянным. На фиг. 3а показано изменение (увеличение) скорости  асинхронного двигателя во времени t. На фиг. 3б показано изменение выходного сигнала Vc' во времени, когда выходной сигнал V0 преобразователя 8 полярных координат нормируется в соответствии с масштабом величин, в котором выражаются глубина Vc модуляции и выходной сигнал схемы 10 расчета глубины модуляции. При t = 18 сек выходной сигнал Vc' ограничивается ограничителем 203 и после этого величина выходного сигнала Vc фиксируется на значении "1" (максимально возможное выходное напряжение ШИМ-инвертора). На фиг. 3в показано изменение во времени выходных сигналов Id и Iq преобразователя 5 полярных координат, выходного сигнала Id* генератора 3 команд на изменение тока и выходного сигнала Iq** регулятора 4 тока. Видно, что на этом графике выходные сигналы Id* и Iq* регулятора 4 тока остаются всегда постоянными. До ограничения напряжения его изменение согласуется с изменением сигнала Id*, а изменение выходного сигнала Iq - с изменением выходного сигнала Iq**, однако после того, как напряжение становится постоянным, выходной сигнал Iq** начинает возрастать вместе со скоростью асинхронного двигателя. С другой стороны, сигнал Id, начиная с момента, когда напряжение становится постоянным, постепенно уменьшается и становится меньше сигнала Id*. Это означает, что управление двигателем осуществляется слабым магнитным полем.
асинхронного двигателя во времени t. На фиг. 3б показано изменение выходного сигнала Vc' во времени, когда выходной сигнал V0 преобразователя 8 полярных координат нормируется в соответствии с масштабом величин, в котором выражаются глубина Vc модуляции и выходной сигнал схемы 10 расчета глубины модуляции. При t = 18 сек выходной сигнал Vc' ограничивается ограничителем 203 и после этого величина выходного сигнала Vc фиксируется на значении "1" (максимально возможное выходное напряжение ШИМ-инвертора). На фиг. 3в показано изменение во времени выходных сигналов Id и Iq преобразователя 5 полярных координат, выходного сигнала Id* генератора 3 команд на изменение тока и выходного сигнала Iq** регулятора 4 тока. Видно, что на этом графике выходные сигналы Id* и Iq* регулятора 4 тока остаются всегда постоянными. До ограничения напряжения его изменение согласуется с изменением сигнала Id*, а изменение выходного сигнала Iq - с изменением выходного сигнала Iq**, однако после того, как напряжение становится постоянным, выходной сигнал Iq** начинает возрастать вместе со скоростью асинхронного двигателя. С другой стороны, сигнал Id, начиная с момента, когда напряжение становится постоянным, постепенно уменьшается и становится меньше сигнала Id*. Это означает, что управление двигателем осуществляется слабым магнитным полем.
Величина выходного сигнала Iq*, который на графике не показан, остается постоянной и равной, благодаря работе регулятора 4 тока, значению сигнала Iq, при этом также остается постоянной и величина сигнала Id**.
На фиг. 3г показано изменение во времени крутящего момента асинхронного двигателя. До ограничения напряжения крутящий момент остается постоянным, поскольку постоянны величины сигнала Iq* команды на изменение моментообразующей составляющей тока статора и сигнала Id* команды на изменение намагничивающей составляющей тока. В момент ограничения напряжения при постоянных величинах сигналов команд крутящий момент уменьшается автоматически из-за ограничения величины подаваемого на асинхронный двигатель напряжения и изменения слабого магнитного поля. Приведенные выше результаты подтверждают возможность реализации предлагаемого способа векторного управления и свидетельствуют о возможности осуществлять непрерывное векторное управление в диапазоне от низких до высоких скоростей двигателя.
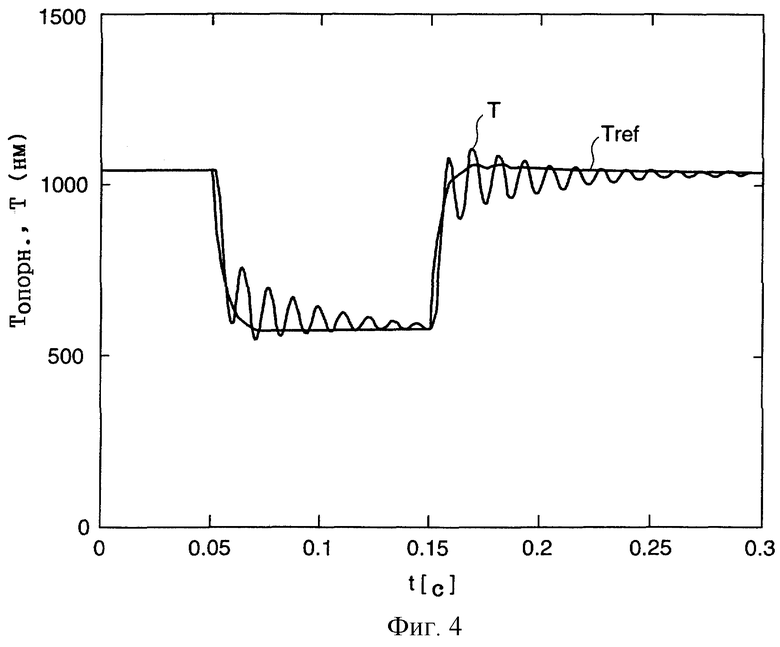
Ниже рассмотрено другое доказательство возможности осуществления векторного управления по этому варианту изобретения. На фиг. 4 показан график изменения крутящего момента при постоянном напряжении (при t = 25 с на фиг. 3). Из этого графика следует, что в ответ на изменение величины сигнала команды Топорн. возникают некоторые переходные колебания крутящего момента Т асинхронного двигателя, однако, за исключением этих переходных колебаний, крутящий момент Т быстро изменяется в соответствии с величиной сигнала команды Топорн., что является доказательством возможности осуществления векторного управления в этом варианте изобретения. Кроме того, при оптимальным образом заданной постоянной регулятора 4 тока, согласованной с характеристикой асинхронного двигателя (объекта управления) упомянутые выше переходные колебания можно существенно уменьшить.
С помощью описанного выше варианта предлагаемого в настоящем изобретении способа с использованием только одного регулятора тока для управления током статора и схемы расчета глубины модуляции можно без изменения конструкции управляющего устройства осуществлять векторное управление асинхронным двигателем в диапазоне от низких до высоких скоростей, когда величина сигнала команды на изменение напряжения превышает максимально возможное выходное напряжение инвертора, определяемое напряжением ПТ источника питания, (режим ШИМ становится моноимпульсным), и прежде всего при высоких скоростях, когда реализуется моноимпульсный режим управления напряжением, а крутящий момент быстро реагирует на команды.
Кроме того, предлагаемый способ, в котором осуществляется автоматическая коррекция случайных изменений напряжения VFC источника питания ПТ, позволяет, как показано на фиг. 2 используя сигнал Vc модуляции в качестве команды, регулировать выходное напряжение инвертора без всякого влияния на него случайных изменений напряжения источника питания ПТ.
Кроме того, в описанном выше варианте изобретения рассмотрен случай ограничения напряжения величиной максимально возможного выходного напряжения преобразователя электрической мощности, хотя фактически величина ограничения напряжения может быть выбрана произвольно таким образом, чтобы можно было произвольно выбрать начало управления слабым магнитным полем. При этом можно выполнить управление слабым магнитным полем, изменяя лишь эту заданную величину, без специального регулирования, как это делалось ранее, слабого магнитного поля по команде Id* на изменение намагничивающей составляющей тока, что позволяет улучшить конструкцию управляющего устройства и упростить процесс управления.
Кроме того, в рассматриваемом варианте изобретения регулятор тока используется только для регулирования тока статора, однако при низких скоростях, когда величина сигнала команды на изменение напряжения меньше максимально возможного выходного напряжения преобразователя электрической мощности, определяемого напряжением ПТ источника питания, можно использовать управление за счет регулирования как намагничивающей составляющей тока, так и тока статора. Если выходной сигнал V0 схемы 8 расчета полярных координат становится больше максимально возможного выходного напряжения V0max, то для отказа от использования регулятора намагничивающей составляющей тока, способ управления нужно изменить. В предлагаемом в настоящем изобретении способе управления в этом случае, как следует из фиг. 3, не требуется обеспечивать совпадение величины сигнала Id* команды на изменение намагничивающей составляющей тока, являющейся выходным сигналом генератора 3 команд на изменение тока, и величины сигнала Id измеренной намагничивающей составляющей тока, являющейся выходным сигналом преобразователя 5 полярных координат, то есть не требуется использовать регулятор тока с интегрирующим звеном, сводящий к нулю разницу величин Id* и Id.
Предлагаемым в настоящем изобретении способом можно осуществлять надежное векторное управление асинхронным двигателем без каких-либо изменений системы управления при переходе от низких скоростей к высоким скоростям (область моноимпульсного режима ШИМ), когда величина сигнала команды на изменение напряжения (глубина модуляции) превышает максимально возможное выходное напряжение инвертора, определяемое напряжением источника ПТ. Таким образом, настоящее изобретение может быть успешно использовано в электропоездах, в которых характеристика крутящего момента тягового двигателя должна обладать высокой чувствительностью к управляющим командам, и в электромобилях, предназначенных для движения по обычным дорогам.

Изобретение относится к электротехнике и может быть использовано в электроприводах с векторным управлением в качестве тяговых электроприводов на электропоездах. Техническим результатом является упрощение и обеспечение непрерывного управления во всем диапазоне скоростей. Устройство управления асинхронным электродвигателем содержит инвертор, преобразующий напряжение постоянного тока в переменный с регулируемой частотой и регулируемым напряжением в режиме широтно-импульсной модуляции, и схему регулирования выходного напряжения инвертора путем изменения глубины модуляции по командам на изменение выходного напряжения, осуществляемое по командам на изменение составляющих намагничивающей и моментообразующей тока статора асинхронного двигателя, на который подается напряжение от инвертора. Устройство управления содержит схему для измерения моментообразующей составляющей тока статора асинхронного двигателя, схему, которая корректирует команду на изменение намагничивающей составляющей тока статора в соответствии с различием между величинами измеренной компоненты намагничивающей составляющей тока статора и команды, схему, которая корректирует выходную частоту инвертора в соответствии с откорректированной командой на изменение намагничивающей составляющей тока статора и схему, которая ограничивает снизу глубину модуляции требуемой величиной или другими условиями. Устройство позволяет осуществлять надежное векторное управление асинхронным двигателем непрерывно в диапазоне от низких до высоких скоростей, при которых величина команды на изменение напряжения превышает максимальное выходное напряжение инвертора, определяемое напряжением постоянного тока. 2 с. и 3 з.п.ф-лы, 4 ил.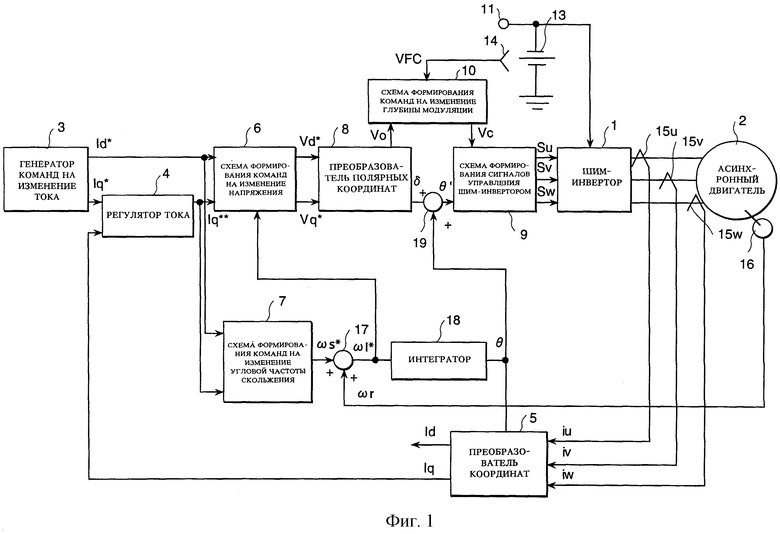
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1264289A2 |
| Частотно-управляемый электропривод | 1985 |
|
SU1332504A1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU612375A1 |
| US 4764712 А, 16.08.1988 | |||
| Передвижное транспортерное устройство | 1927 |
|
SU19138A1 |
| DE 3744905 А, 10.10.1991. | |||
