Изобретение относится к устройству для автомобиля, содержащему, по меньшей мере, один датчик расстояния для измерения в основном бокового расстояния между автомобилем и объектами и управляющее устройство для управления датчиком расстояния, при этом датчик расстояния в период времени активирования передает измерительные сигналы и в период времени измерения принимает отраженный, по меньшей мере, от одного объекта измерительный сигнал.
Из документа WO 02/084329 A2 известна вспомогательная система для водителя автомобиля, содержащая, по меньшей мере, один датчик для измерения расстояния автомобиля от объекта и управляющий блок для управления функциональными группами автомобиля в зависимости от результата измерения датчиком. При этом управляющее устройство выполнено с возможностью переключения в зависимости от скорости автомобиля между рабочим режимом помощи при парковке и рабочим режимом предотвращения столкновения. При этом переключение между рабочим режимом регулирования скорости и рабочим режимом предотвращения столкновения зависит от измеряемого датчиком перемещения объекта относительно автомобиля.
Из документа EP 0305907 B1 известно устройство помощи при парковке для автомобилей. При этом автомобиль имеет расположенный на наружной стороне автомобиля передатчик, который передает излучаемый в направлении свободного места для парковки сигнал, при этом соответствующий приемник принимает отраженный сигнал. Передаваемый сигнал ограничен очень небольшим углом излучения и излучается поперек продольной оси автомобиля, так что при движении рядом со свободным местом для парковки полученные отраженные сигналы в зоне свободного места для парковки явно отличаются от отраженных сигналов вне свободного места для парковки. Из этого явного отличия сигналов в устройстве сравнения определяется длина свободного места для парковки с учетом сигнала пути.
Из документа WO 03/087874 A1 известен способ использования вспомогательной системы для парковки у автомобиля, содержащей, по меньшей мере, один датчик расстояния, который измеряет ближнюю зону, по меньшей мере, на некоторых участках сбоку от автомобиля. Кроме того, автомобиль имеет датчик пути, при этом управляющее устройство определяет из величин, измеряемых датчиком во время проезда у свободного места для парковки, длину или ширину свободного места для парковки. При этом длина или ширина свободного места для парковки корректируется на определенную величину, или же в зависимости от скорости автомобиля во время проезда у свободного места для парковки выполняется измерение с помощью датчика расстояния в различные интервалы времени.
Задачей изобретения является улучшение измерения возможного свободного места для парковки автомобиля.
Эта задача решена, согласно изобретению, с помощью устройства указанного выше вида за счет того, что при помощи управляющего устройства изменяется период времени измерения и приема датчика расстояния. При принимаемой за постоянную скорости звука можно варьировать измерение удаления за счет того, что устанавливается различное время приема. Если время приема выбирается небольшим, то возможно быстрое повторение измерения. При более длительном времени приема при измерении скорость повторения измерений падает. Тем самым уменьшается также разрешающая способность в направлении движения движущегося автомобиля, поскольку во время измерения проходится зависимый от скорости движения путь. При высокой скорости повторения можно особенно хорошо и точно измерять начало и конец свободного места для парковки. Возможно точное измерение важно, в частности, тогда, когда свободное место для парковки имеет длину на уровне минимально необходимой длины свободного места для парковки, при этом минимально необходимая длина свободного места для парковки зависит от типа автомобиля и/или возможной нагрузки (например, опоры для велосипедов на сцепке для прицепа или размещаемой на задней двери). Для снабжения водителя точной информацией о том, действительно ли имеется достаточное свободное место для парковки, предусмотрено изменение времени приема при измерении у датчика расстояния.
В предпочтительном варианте выполнения время приема при измерении можно изменять, по меньшей мере, между двумя установками для времени приема. При этом предпочтительно, если время приема изменяется с помощью управляющего устройства так, что по существу контролируется расстояние меньше ширины автомобиля, в частности до 1,5 м. Во время поиска свободного места для парковки автомобиль движется мимо припаркованных автомобилей, и можно за счет меньшего, соответственно короткого времени приема при измерении особенно точно обнаруживать конец припаркованного автомобиля. Обычно ищущий свободное место для парковки автомобиль едет вдоль уже припаркованных автомобилей на расстоянии меньше ширины автомобиля, так что в этом случае время приема является достаточным и соответственно предпочтительным для измерения диапазона расстояний.
Кроме того, является предпочтительным, что время приема при измерении изменяется с помощью управляющего устройства так, что контролируется по существу расстояние меньше двойной ширины автомобиля, в частности до 3,5 м. Как только ищущий свободное место для парковки автомобиль обнаруживает возможное свободное место для парковки, то обычно объекты вне этого возможного свободного места для парковки не имеют значения. Было установлено, что целесообразно контролировать расстояние меньше двойной ширины автомобиля.
За счет того, что управляющее устройство изменяет время приема при измерении длины возможного свободного места для парковки, можно особенно точно обнаруживать начало и конец свободного места для парковки. Кроме того, во время измерения свободного места для парковки значение имеет удаление и соответственно расстояние до возможно имеющегося бокового камня тротуара. При определении этого бокового камня можно в последующем процессе парковки ориентировать и возможно выравнивать автомобиль у этого бокового камня (в припаркованном состоянии). Вместо бокового камня тротуара можно измерять также удаление других объектов или препятствий (например, направляющих планок, заборов и так далее).
За счет того, что, по меньшей мере, один датчик расстояния автомобиля выполнен в виде ультразвукового датчика, который измеряет свободное место для парковки, можно использовать дешевый и широко распространенный датчик расстояния для измерения свободных мест для парковки.
Для обеспечения обнаружения бокового камня тротуара или другого ограничения проезжей части в течение, по меньшей мере, одного времени приема при измерении датчик расстояния расположен на автомобиле так, что он может измерять объект на высоте обычного бокового камня. Для этого конус излучения датчика расстояния должен падать на бортовой камень в течение периодов времени приема при измерении так, что отраженные лучи могут приниматься с помощью датчика расстояния.
В качестве ограничений проезжей части в этом смысле могут служить также направляющие планки, стены, столбы, загородки, зеленые насаждения, как, например, кустарники или живые изгороди, дорожные знаки и так далее. Если с помощью, по меньшей мере, одного датчика расстояния и/или управляющего устройства можно измерять изменение расстояния до объекта и/или ограничения проезжей части, то можно выравнивать паркуемый автомобиль в соответствии с этим изменением расстояния.
В другом предпочтительном варианте выполнения предусмотрено изменение времени приема при измерении в зависимости от скорости и/или окружения автомобиля и/или положения. Дополнительно к этому можно, например, на основе лишь скорости автомобиля определять, является ли целесообразным изменение времени приема при измерении, соответственно является ли целесообразным активирование датчика расстояния, поскольку процессы парковки выполняются, как правило, с меньшей скоростью. Время приема при измерении можно также изменять на основании окружения автомобиля, как, например, припаркованных у обочины автомобилей, а именно тогда, когда обнаружены возможные свободные места для парковки. Это относится также к зависимости времени приема при измерении от возможного положения. Если автомобиль находится в определенном положении относительно возможного свободного места для парковки, то изменяется время приема при измерении с целью возможно точного определения начала и конца этого свободного места для парковки. Возможно также, что водитель активно включает режим поиска свободного места для парковки или сознательно отключает его. В этом режиме датчик расстояния передает указанные выше сигналы для измерения свободных мест для парковки.
Также является предпочтительным, когда на основе поведения водителя заметно, что он ищет свободное место для парковки. В этом случае система может активироваться автоматически и может изменяться время приема при измерении для измерения свободного места для парковки.
Свободное место для парковки, длина которого достаточна для автомобиля, может сигнализироваться водителю автомобиля акустически, и/или оптически, и/или гаптически. При этом особенно предпочтительно, когда в автомобиле предусмотрена возможность установки сохраняемой величины минимально необходимой длины свободного места для парковки, что означает, что ее можно изменять. Основанием для этого может быть то, что некоторые водители автомобиля во время процесса парковки чувствуют себя лучше, когда имеется дополнительное пространство для маневра. Это может быть целесообразным также тогда, когда требуется дополнительное пространство для возможной погрузки, или разгрузки, или для открывания дверей или крышки багажника. При этом целесообразной является лишь установка величины, превышающей необходимую для самого автомобиля длину. Установку и/или визуализацию свободного места для парковки и/или минимально необходимого свободного места для парковки можно осуществлять, например, с помощью многофункциональных управляющих устройств, которые в настоящее время уже реализованы в автомобилях с комбинированными навигационными и радио- или телефонными устройствами. Кроме того, устройство может быть дополнительно снабжено системой камер, которая непрерывно или однократно создает изображение свободного места для парковки с целью обеспечения для водителя автомобиля визуализации возможного свободного места для парковки. Так, например, в свободном месте для парковки могут находиться дополнительные маркировки или же дополнительные знаки (например, место для парковки инвалидов), которые водитель автомобиля может распознавать на основании дополнительной информации.
Кроме того, поставленная задача решена в способе согласно изобретению. Для измерения возможного свободного места для парковки из проезжающего у свободного места для парковки автомобиля, у которого с помощью измерительного устройства измеряется длина свободного места для парковки, и при этом во время активирования излучают с помощью датчика расстояния измерительные сигналы и в течение времени приема при измерении улавливают с помощью датчика расстояния отраженные от объектов измерительные сигналы, изменяют время приема для измерения длины свободного места для парковки. За счет этого обеспечивается особенно точное измерение начала и конца свободного места для парковки из движущегося автомобиля. За счет того, что при обнаружении начала свободного места для парковки увеличивают время приема при измерении или устанавливают на его максимальную величину, можно проверять возможную зону парковки на наличие объектов. Кроме того, можно измерять в контролируемом диапазоне расстояний прохождение проезжей части или обнаруживать боковой камень тротуара.
За счет того, что время приема при измерении при проезде у свободного места для парковки изменяют перед минимально необходимой длиной свободного места для парковки или устанавливают ту минимальную величину, можно выполнять измерение расстояния с высокой скоростью повторения. Это приводит при проезде автомобиля у свободного места для парковки к максимально возможному разрешению (точности) измерения длины свободного места для парковки в направлении движения.
За счет того, что после достижения близкой к минимальной длине свободного места для парковки дополнительной длины время приема при измерении увеличивают только тогда, когда в возможной зоне парковки автомобиля не обнаруживают никакого объекта. Таким образом, целесообразно снова контролировать бóльший диапазон измерения на наличие объектов. Тем самым можно, например, обнаруживать более удаленный боковой камень тротуара у свободного места для парковки или же измерять прохождение проезжей части. После достижения минимально необходимой длины свободного места для парковки становится очевидным, что автомобиль в любом случае умещается в пройденное свободное место для парковки, так что можно снова продолжать обнаружение возможного объекта, например, бокового камня тротуара, с увеличенным временем приема при измерении.
Когда переменно изменяют время приема при измерении для обнаружения объектов, то можно осуществлять измерение объекта с оптимальной, соответственно согласованной скоростью повторения измерений в зависимости от ситуации. Если, например, обнаруживают объект, то время приема при измерении можно устанавливать так, что по существу измеряются объекты в заданном диапазоне удалений. За счет этого возможна максимальная для этой ситуации скорость повторения измерения. Таким образом, измерение расстояния в направлении движения имеет возможно высокую точность (возможно больше точек измерения, соответственно данных измерения).
Кроме того, предпочтительным является то, что ориентацию датчика расстояния в автомобиле выбирают так, что при установленном большом времени приема при измерении обеспечивается распознавание в качестве объекта бокового камня тротуара. При этом излучаемый датчиком расстояния измерительный конус захватывает боковой камень, который можно за счет этого обнаруживать. При этом может быть предпочтительным, что в автомобиле основное направление излучения датчика расстояния направлено под углом к поверхности проезжей части.
Можно также использовать дополнительный датчик расстояния, который может обнаруживать боковой камень тротуара или объект в другом диапазоне расстояний. При этом основное направление излучения этого датчика отличается от направления излучения первого датчика. В этом случае для датчиков расстояния можно применять различные длительности измерительного времени приема.
На чертежах изображено:
фиг.1 - схема измерения, согласно изобретению, возможного свободного места для парковки;
фиг.2 - блок-схема вспомогательной системы для водителя, согласно изобретению;
фиг.3 - схема ориентации датчика расстояния в автомобиле для обнаружения бокового камня тротуара и
фиг.4 - последовательность периодов времени активирования и времени приема при измерении.
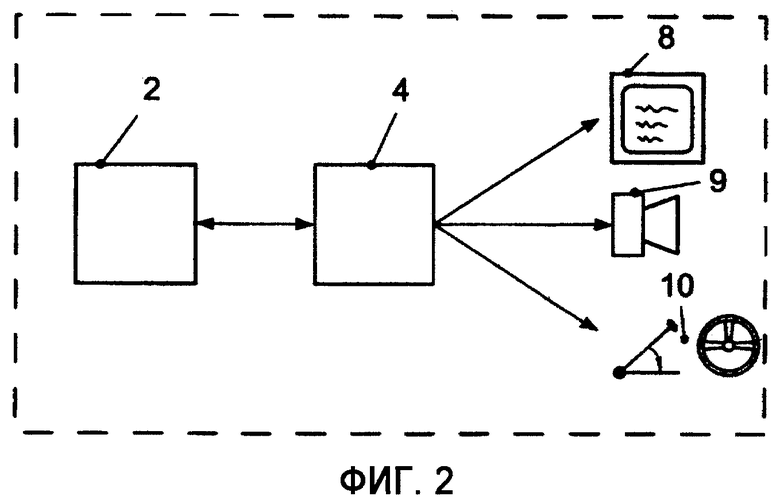
На фиг.1 показана схема процесса измерения, согласно изобретению, возможного свободного места 8 для парковки. Автомобиль 1 движется в направлении F мимо объекта 3. При этом автомобиль 1 имеет расстояние Y1 до объекта 3. Это расстояние измеряется с помощью показанного на фиг.2 датчика 2 расстояния, при этом зона 11 излучения датчика захватывает объект 3. Отраженное излучение датчика принимается датчиком 2 расстояния в течение времени Т2 приема при измерении. В показанной на фиг.1 слева ситуации движения, в которой датчик 2 расстояния обнаружил объект 3, измерение расстояния повторяется при небольшом времени Т2 приема при измерении. Таким образом, датчик 2 расстояния и соответственно включенное за ним управляющее устройство 4 может с высокой точностью измерять начало свободного места Р для парковки в месте Х1. На изображенной в нижней части фиг.1 оси Х расстояния начало свободного места Р для парковки обозначено как Х1. Как только автомобиль 1, соответственно управляющее устройство 4 датчика 2 расстояния обнаруживает начало свободного места Р для парковки, изменяется время Т2 приема при измерении. В этой ситуации движения время Т2 приема при измерении увеличивается. При увеличенном времени Т2 приема при измерении датчик 2 расстояния может измерять также дальше расположенные объекты 3. В показанном на фиг.1 случае датчик 2 расстояния обнаруживает внутри свободного места Р для парковки, соответственно, точнее внутри минимально необходимой длины L1 свободного места для парковки, боковой камень 6 тротуара. При этом возможно, что датчик 2 расстояния, соответственно управляющее устройство 4 измеряет лишь соответствующее расстояние Y2 до бокового камня 6 тротуара, однако возможно также, что во время движения у свободного места Р для парковки измеряется ход 7 изменения расстояния и соответственно запоминается или при необходимости дополнительно оценивается. Управляющее устройство 4 может за счет автоматически выполняемого или выполняемого при поддержке водителем процесса парковки осуществлять ориентацию вдоль бокового камня 6 или вдоль объектов 3 или других ограничений проезжей части. При выполняемом при поддержке водителя процессе парковки управляющее устройство 4 или дополнительное управляющее устройство может выдавать указания управления водителю автомобиля или выполнять процесс управления самостоятельно. В последнем случае водитель автомобиля сохраняет приоритет управления за счет воздействия на педаль акселератора, или соответственно педаль тормоза. Возможно выполнение также автоматизированного режима парковки без вмешательства водителя.
Незадолго до достижения автомобилем 1 минимально необходимой длины L1 свободного места для парковки время Т2 приема при измерении уменьшается. На фиг.1 этот момент переключения обозначен на оси Х расстояния как Х2. Это переключение времени Т2 приема при измерении происходит потому, что теперь нужно измерять с повышенной точностью, находится ли еще внутри минимально необходимой длины L1 свободного места для парковки объект 3, или же можно без опасности выполнять процесс парковки в свободное место Р для парковки. Поскольку автомобиль 1 движется с конечной скоростью движения в направлении F, то он проходит между двумя измерениями расстояние Х. Если работа происходит с небольшим временем Т2 приема при измерении и повторяющимся измерением, то расстояние между местами измерения в направлении Х можно сократить. При этом возрастает разрешение в направлении Х за счет измерения в возможно большем числе точек измерения, соответственно получения возможно большей информации. Целесообразно прекращать измерение, как только преодолевается установленный порог скорости и/или ускорения, поскольку можно предполагать, что водитель автомобиля не намерен выполнять процесс парковки.
Кроме того, на фиг.1 схематично показан ход 7 изменения расстояния до бокового камня 6 тротуара. Во время движения автомобиля 1 у расположенного с левой стороны объекта 3 измеряется расстояние Y1. В обозначенном Х1 месте начинается свободное место Р для парковки, которое в направлении Y ограничено боковым камнем 6 тротуара. Боковой камень имеет расстояние Y2 до автомобиля 1. Свободное место Р для парковки имеет длину LP, при этом минимально необходимая длина L1 свободного места для парковки автомобиля 1 короче длины LP. Таким образом, возможна парковка автомобиля 1 внутри свободного места Р для парковки. К минимально необходимой длине L1 свободного места для парковки примыкает дополнительная длина LZ, внутри которой сохраняется небольшое время приема для измерения объекта. Если внутри дополнительной длины LZ также не обнаруживается объект 3, то измерительное время Т2 приема снова увеличивается для обнаружения, например, бокового камня 6 или изменения удаления до бокового камня. Увеличение времени Т2 приема при измерении можно осуществлять потому, что автомобиль очевидно входит в свободное место Р для парковки, и поэтому не обязательно обнаруживать конец свободного места для парковки с большой точностью. При этом в одном предпочтительном варианте выполнения можно устанавливать дополнительную длину LZ так, что она компенсирует увеличенную неточность на основе большего времени Т2 приема при измерении. При этом дополнительную длину LZ можно согласовывать переменно или с помощью ступеней скорости в зависимости от разрешения измерения для компенсации неточности в направлении движения. Время Т2 приема при измерении и скорость движения влияют на точность измерения в направлении движения.
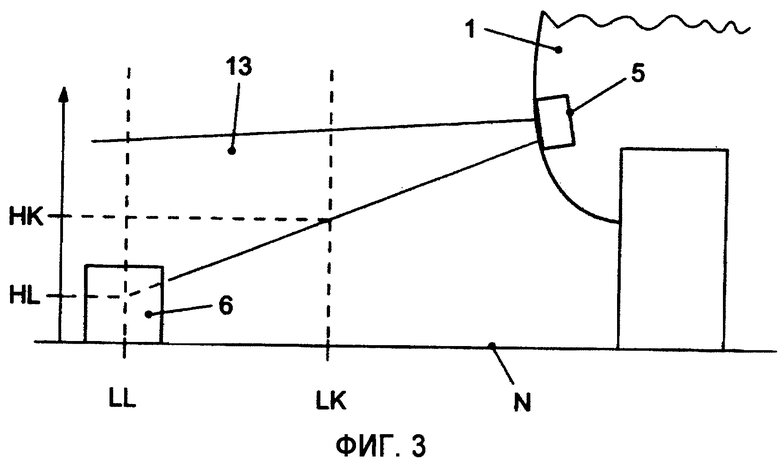
На фиг.2 показана блок-схема устройства согласно изобретению. Устройство, выполненное, например, в качестве вспомогательной системы движения, расположено внутри автомобиля 1, который на фиг.2 изображен в виде пунктирного прямоугольника. Датчик 2 расстояния измеряет данные расстояния до возможных объектов 3 и передает их в управляющее устройство 4. Управляющее устройство 4 может обрабатывать эту информацию для водителя тем, что оно, например, отображает на оптическом индикаторном устройстве ход 7 изменения расстояния или указания по управлению для парковки автомобиля 1 или же подтверждает, что длина LP свободного места для парковки больше минимально необходимой длины L1 свободного места для парковки. Возможно также, что информация о свободном месте Р для парковки или о процессе парковки выдается с помощью акустического индикаторного устройства (например, громкоговорителя). Гаптическое индикаторное устройство 10, которое представлено на фиг.2 символом педали акселератора и рулевым колесом, может также выдавать водителю автомобиля важные указания для процесса парковки. Гаптические указания могут выдаваться, например, когда измеренное свободное место Р для парковки меньше минимально необходимой длины L1, а водитель автомобиля, несмотря на это, начинает процесс парковки, или когда водитель автомобиля имеет слишком высокую скорость движения для обеспечения надежного процесса парковки, или же когда достигается минимальная длина свободного места для парковки. При этом, например, педаль акселератора может иметь явно большее сопротивления (встречное давление или вибрацию), когда водитель автомобиля пытается превысить максимальную скорость парковки.
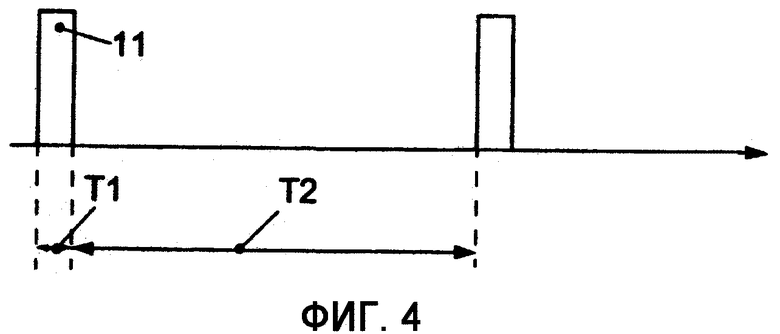
На фиг.3 показана схема ориентации датчика 2 расстояния в автомобиле 1 для обнаружения бокового камня 6 тротуара. В этом примере выполнения датчик 2 расстояния встроен в автомобиль 1 в виде ультразвукового датчика 5. Этот автомобиль 1 показан на фиг.3 частично в виде стоящего на дорожном полотне колеса автомобиля с примыкающей частью кузова. Ультразвуковой датчик 5 излучает звуковые волны в зоне 13 излучения датчика. Эта зона 13 излучения датчика может расширяться в пространстве в форме конуса от ультразвукового датчика 5. Если управляющее устройство 4 устанавливает короткое, соответственно небольшое время Т2 приема при измерении, то отраженные ультразвуковые сигналы могут измеряться на дальности LK действия от автомобиля 1. Этот диапазон измерения простирается при большем времени Т2 приема при измерении до дальности LL действия. Минимальная высота объектов при соответствующих дальностях LK, соответственно LL действия с коротким, соответственно длительным временем Т2 приема при измерении обозначены на фиг.3 как HK, соответственно HL с соответствующими пунктирными линиями. Путем наклонной установки ультразвукового датчика 5 минимальная высота HL измерения при длительном измерительном времени Т2 приема выбрана так, что можно обнаруживать боковой камень 6 тротуара. Таким образом, датчик 2 расстояния в зоне дальности LL действия может обнаруживать боковой камень 6, соответственно изменение удаления от бокового камня. В качестве датчиков расстояния можно применять также радарные и/или лазерные датчики.
На фиг.4 показана схема последовательности времени Т1 активирования и времени Т2 приема при измерении. В начале измерения излучается измерительный сигнал М в виде импульса в течение времени Т1 активирования. К времени Т1 активирования примыкает время Т2 приема при измерении, во время которого улавливаются отраженные лучи датчика. После времени Т1 активирования и времени Т2 приема при измерении цикл измерения заканчивается. За этим циклом измерения могут следовать непосредственно или с перерывом другие циклы измерения. Для повышения точности измерения из движущегося автомобиля 1 изменяют, согласно изобретению, время Т2 приема при измерении. Можно также изменять одно время Т1 активирования или совместно с временем Т2 приема при измерении.
Перечень позиций
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОМОЩИ РУЛЕНИЯ ПРИ ПАРКОВКЕ И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2006 |
|
RU2412848C2 |
| ОПТИЧЕСКИЙ ДАТЧИК ДЛЯ АВТОМОБИЛЯ | 2012 |
|
RU2515312C2 |
| СИСТЕМЫ И СПОСОБЫ ПОМОЩИ ПРИ ПАРКОВКЕ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2710505C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ МЕСТ ДЛЯ ПАРКОВКИ | 2015 |
|
RU2700635C1 |
| УСТРОЙСТВО КОНТРОЛЯ ДИСТАНЦИЙ АВТОМОБИЛЯ ДО ПРЕПЯТСТВИЙ | 2010 |
|
RU2425765C1 |
| СИСТЕМА, АССИСТИРУЮЩАЯ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА, ТРАНСПОРТНОЕ СРЕДСТВО С УКАЗАННОЙ СИСТЕМОЙ И СПОСОБ ОКАЗАНИЯ ПОДДЕРЖКИ ВОДИТЕЛЮ ПРИ УПРАВЛЕНИИ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2555248C2 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2016 |
|
RU2719106C1 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ЕЕ РАБОТОЙ | 2009 |
|
RU2503027C2 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2703478C1 |
| ВЫЯВЛЕНИЕ СВЕСА ПОЛУПРИЦЕПА ДЛЯ АКТИВНОГО СОДЕЙСТВИЯ ПАРКОВКЕ | 2018 |
|
RU2695749C1 |
Изобретение относится к устройству для автомобиля (1), содержащему, по меньшей мере, один датчик (2) расстояния для измерения в основном бокового расстояния (у) между автомобилем (1) и объектами (3) и управляющее устройство (4) для управления датчиком (2) расстояния, при этом датчик (2) расстояния во время (Т1) активирования передает измерительные сигналы (М) и в течение времени (Т2) приема при измерении принимает отраженный, по меньшей мере, от одного объекта (3) измерительный сигнал (М). При этом предусмотрено изменение с помощью управляющего устройства (4) времени (Т2) приема при измерении у датчика (2) расстояния. 2 н. и 17 з.п. ф-лы, 4 ил.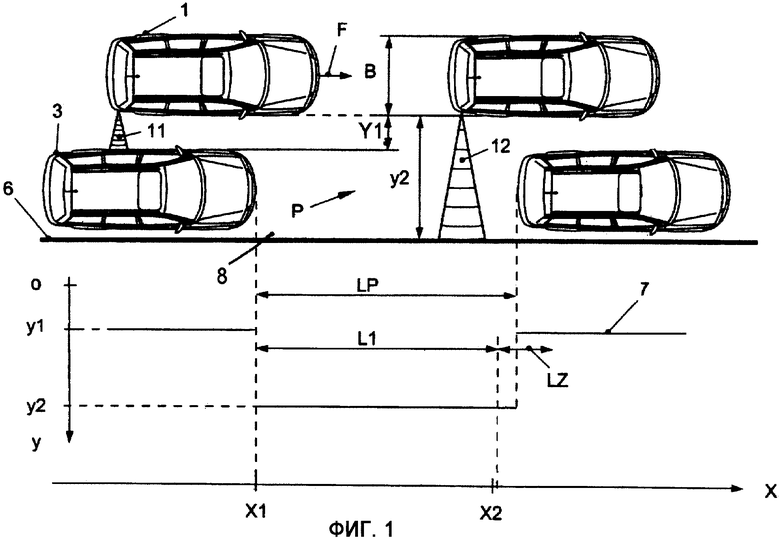
1. Устройство для автомобиля (1), содержащее, по меньшей мере, один датчик (2) расстояния для измерения в основном бокового расстояния (Y) между автомобилем (1) и объектами (3) и управляющее устройство (4) для управления датчиком (2) расстояния, при этом датчик (2) расстояния во время (Т1) активирования передает измерительные сигналы (М) и в течение времени (Т2) приема при измерении принимает отраженный, по меньшей мере, от одного объекта (3) измерительный сигнал (М), отличающееся тем, что в зависимости от ситуации предусмотрено изменение посредством управляющего устройства (4) времени (Т2) приема при измерении у датчика (2) расстояния.
2. Устройство по п.1, отличающееся тем, что предусмотрено изменение времени (Т2) приема при измерении, по меньшей мере, между двумя установками для периодов времени (Т2) приема.
3. Устройство по п.1, отличающееся тем, что предусмотрено такое изменение времени (Т2, Т3) приема при измерении посредством управляющего устройства (4), что контролируется, по существу, расстояние (Y) меньше ширины (В) автомобиля, в частности до около 1,5 м.
4. Устройство по п.1, отличающееся тем, что предусмотрено такое изменение времени (Т2) приема при измерении с помощью управляющего устройства (4), что контролируется, по существу, расстояние (Y) меньше двойной ширины (В) автомобиля, в частности до около 3,5 м.
5. Устройство по п.1, отличающееся тем, что управляющее устройство (4) изменяет время (Т2) приема для измерения длины (LP) возможного свободного места (Р) для парковки.
6. Устройство по п.1, отличающееся тем, что, по меньшей мере, один датчик (2) расстояния выполнен в виде ультразвукового датчика (5).
7. Устройство по п.1, отличающееся тем, что датчик (2) расстояния расположен в автомобиле (1) так, что обеспечивается обнаружение бокового камня (6) тротуара или ограничения полосы движения внутри, по меньшей мере, одного периода времени (Т2) приема при измерении.
8. Устройство по п.1, отличающееся тем, что предусмотрена возможность измерения, по меньшей мере, посредством одного датчика (2) расстояния и/или управляющего устройства (4) хода (7) изменения расстояния до объекта и/или до ограничения полосы движения.
9. Устройство по п.1, отличающееся тем, что предусмотрено изменение времени (Т2) приема при измерении в зависимости от скорости и/или окружения автомобиля и/или его положения.
10. Устройство по п.1, отличающееся тем, что предусмотрено изменение времени (Т2) приема при измерении на основании поведения при движении водителя автомобиля.
11. Устройство по п.1, отличающееся тем, что в автомобиле (1) предусмотрена возможность акустической, и/или оптической, и/или гаптической сигнализации при измерении длины (LP) возможного свободного места (Р) для парковки больше минимальной длины (L1) свободного места для парковки.
12. Устройство по п.1, отличающееся тем, что для автомобиля (1) предусмотрена возможность установки величины минимально необходимой длины (L1) свободного места для парковки и/или дополнительной длины (LZ).
13. Способ измерения возможного свободного места (Р) для парковки из проезжающего у свободного места (Р) для парковки автомобиля (1), при этом с помощью измерительного устройства, предусмотренного на автомобиле (1), измеряют длину (LP) свободного места для парковки, и при этом в период времени (Т1) активирования обеспечивают излучение с помощью датчика (2) расстояния измерительных сигналов (М) и в течение времени (Т2) приема при измерении с помощью датчика (2) расстояния улавливают отраженные от объектов (3) измерительные сигналы (М), отличающийся тем, что для измерения длины (LP) свободного места для парковки посредством измеряющего устройства изменяют время (Т2, Т3) приема при измерении.
14. Способ по п.13, отличающийся тем, что после обнаружения начала свободного места (Р) для парковки время (Т2) приема при измерении увеличивают или устанавливают на максимальное значение.
15. Способ по п.13, отличающийся тем, что при движении у свободного места (Р) для парковки с минимально необходимой длиной (L1) или в области минимальной длины (L1) свободного места для парковки время (Т2) приема при измерении уменьшают или устанавливают на минимальное значение.
16. Способ по п.15, отличающийся тем, что после достижения примыкающей к минимальной длине свободного места (Р) для парковки дополнительной длины (LZ) время (Т2) приема при измерении увеличивают лишь тогда, когда в возможной зоне (Р) парковки не обнаруживают никакого объекта (3).
17. Способ по п.15 или 16, отличающийся тем, что после достижения примыкающей к минимальной длине (L1) свободного места для парковки дополнительной длины (LZ) время (Т2) приема при измерении увеличивают, если до этого в возможной зоне (Р) парковки не обнаруживают никакого объекта (3).
18. Способ по п.13, отличающийся тем, что для измерения объекта переменно изменяют время (Т2) приема при измерении.
19. Способ по п.13, отличающийся тем, что ориентацию датчика (2) расстояния в автомобиле (1) выбирают так, что при увеличенном времени (Т2) приема при измерении обеспечивается обнаружение бокового камня (6) тротуара в качестве объекта (3).
| RU 2052768 C1, 20.01.1996 | |||
| US 4500977 A, 19.02.1985 | |||
| US 5508974 A, 16.04.1996 | |||
| US 4785429 A, 15.11.1988 | |||
| US 4326273 A, 20.04.1982. |

