Изобретение относится к системе помощи руления при парковке и к способу ее эксплуатации, которые способствуют выравниванию автомобиля на парковочном месте.
Современные автомобили нередко располагают вспомогательными парковочными системами (системами помощи при парковке), которые могут выполнять различные вспомогательные функции. К ним относятся, например:
а) сигнализация аварийного сближения (Park Distance Control - PDC);
б) отображение информации о пригодности парковочного места, например о его габаритах;
в) поддержка водителя при парковке, что может включать в себя задавание угла поворота рулевого колеса или даже автоматическое вмешательство в рулевое управление;
г) полностью автоматическая парковка.
В случае вспомогательных функций в) и г) требуется, как правило, вмешательство в рулевое управление. Это значит, что управление автомобилем необходимо активно изменять в процессе парковки. Это вмешательство в рулевое управление может осуществляться автоматически самим автомобилем. В случае вспомогательных функций в) и г) автомобиль рассчитывает заданную траекторию, по которой он паркуется или должен быть припаркован на парковочном месте.
Из DE 3827729 А1 известно устройство сигнализации о столкновении для автомобилей, выполняющее функцию а). С помощью этого устройства определяется, возникает ли на выбранной автомобилем траектории опасность столкновения с препятствием.
Из DE 10220426 A1 и DE 10220427 А1 известны вспомогательные парковочные системы, которые определяют размер парковочного места, рассчитывают из этого возможный процесс парковки автомобиля и дают водителю указания, в какую сторону ему следует поворачивать рулевое колесо и как ему следует ускорять или тормозить автомобиль. В обеих публикациях упомянут вариант, в котором водитель приводит в действие рулевое управление, а автомобиль самостоятельно ускоряется и затормаживается. Кроме того, в обеих публикациях упомянут вариант, в котором автомобиль полностью автоматически паркуется или выводится с парковки без вмешательства в рулевое управление и в процесс ускорения и/или торможения. В DE 10220427 A1 предусмотрено также, что предпочтительный процесс парковки или вывода с парковки визуально отображается на дисплее.
Из DE 10354661 A1 также известна вспомогательная парковочная система, которая может определять размер парковочного места, рассчитывать заданную траекторию и предоставлять водителю информацию и указания о процессе парковки, так что эта система может запарковать автомобиль на парковочном месте по заданной траектории. Во время первого процесса парковки за один заход рулевое управление может осуществляться автоматически. В другом варианте предусмотрено, что для осуществления процесса маневрирования могут даваться указания в отношении направления поворота рулевого колеса и направления движения.
Из WO 2004/059408 A1 известна вспомогательная парковочная система, в которой парковочное место и автомобиль вместе с заданной траекторией отображаются для водителя на виде сверху. Изображение автомобиля наискось по отношению к парковочному месту указывает, что по окончании процесса парковки он еще может быть выровнен водителем на парковочном месте, чтобы обеспечить оптимальное положение автомобиля.
Вспомогательные парковочные системы, позволяющие полностью автоматически парковать автомобиль, связаны с некоторыми проблемами. В случае полностью автоматических процессов люди склонны не слишком строго следовать своим обязанностям контроля, как это предписано. Так, возникает опасность того, что водитель автомобиля, который оборудован вспомогательной парковочной системой для полностью автоматической парковки, будет пренебрегать своими обязанностями контролировать парковочное место, в частности на предмет нахождения в его зоне людей. Кроме того, по крайней мере неопытному водителю будет нелегко предсказать, какие движения автомобиль будет совершать при парковке. Это дополнительно затрудняет соблюдение водителем обязанностей контроля. Для их полного соблюдения требуются очень сложные сенсорные системы с редундантностью и разнообразием, поскольку, в частности, подвижные объекты обнаруживаются как таковые автомобилем лишь с трудом. Если подвижный объект, например другой движущийся автомобиль, не обнаруживается как подвижный объект, то возникает повышенная опасность столкновения. Поэтому сегодня предпочтительны вспомогательные парковочные системы, в которых водитель активно участвует в процессе парковки, чтобы соблюдать обязанности контроля и, тем не менее, освободиться от части задач при парковке.
Известные полуавтоматические вспомогательные парковочные системы объединяет то, что они могут поддерживать процесс парковки за один заход, приводящий к оптимальному выравниванию положения запаркованного автомобиля, только в том случае, если парковочное место имеет достаточный размер, в частности достаточную длину. В частности, в городах, где автомобили нередко припарковываются у края проезжей части параллельно ей, парковочные места зачастую не размечены. Поэтому их размеры сильно варьируются. Достаточно большие парковочные места, на которых автомобиль может парковаться за один заход посредством вспомогательной парковочной системы в соответствии с уровнем техники, водителю нередко трудно найти. Таким образом, автомобиль по окончании первого этапа парковки за один заход хотя и припаркован на парковочном месте, однако ориентация автомобиля отличается от заданной ориентации, которая, как правило, параллельна краю длинной стороны парковочного места. Термин «за один заход» обозначает этап парковки, на котором автомобиль движется непрерывно, а направление вращения его колес не изменяется.
Из WO 2004/059408 А1, правда, известна вспомогательная парковочная система, в которой водителю стрелкой указывается последующее направление маневрирования. Однако в целом оптимально не решена проблема изменения положения автомобиля посредством полуавтоматической вспомогательной парковочной системы в отношении его ориентации на парковочном месте. Та же проблема изменения направления автомобиля возникает и в том случае, если автомобиль должен быть выведен с парковки. Целью процесса выведения с парковки является изменение направления автомобиля так, чтобы он затем за один заход мог выехать с парковочного места.
Таким образом, в основе изобретения лежит задача создания полуавтоматической системы и способа эксплуатации такой системы, благодаря которым водитель получает лучшую поддержку при выравнивании автомобиля.
Эта задача решается согласно изобретению посредством полуавтоматической системы помощи руления при парковке с признаками п.1 и способа эксплуатации такой системы с признаками п.12 формулы. Предпочтительные варианты осуществления изобретения приведены в зависимых пунктах.
В частности, предложена полуавтоматическая система помощи руления при парковке автомобиля для поддержки выравнивания его положения на парковочном месте, содержащая средства регистрации активирующего сигнала, средства определения направления изменения, в котором должно быть изменено положение автомобиля, и блок управления, который в активном состоянии системы управляет по меньшей мере одним исполнительным элементом так, что поворотные колеса автомобиля повернуты в направлении изменения при движении передним ходом и максимально повернуты против направления изменения при движении задним ходом. Водитель, который разместил свой автомобиль на парковочном месте за один заход, однако, еще не выровнял его параллельно краю продольной стороны парковочного места, стоит перед задачей выравнивания автомобиля на парковочном месте. При активизации системы она должна определить, в каком направлении должно быть изменено положение автомобиля.
При парковке автомобиля задним ходом на параллельном краю проезжей части парковочном месте по окончании первого этапа парковки расстояние, измеренное от передней стороны автомобиля до края парковочного места, больше расстояния, измеренного от задней стороны автомобиля до бокового края парковочного места. Это значит, что колеса при движении передним ходом должны быть повернуты вправо. В таком случае, следовательно, направление изменения правое. Как только будет установлено, в каком направлении должно быть изменено положение, система помощи руления при парковке освобождает водителя от необходимости поворота колес с помощью рулевого колеса. Как только водитель включит переднюю передачу, блок управления системы помощи руления при парковке повернет колеса, например, максимально в направлении изменения, т.е. вправо. Водитель может теперь ехать передним ходом. Если длины парковочного места недостаточно, так что положение автомобиля по окончании этого движения передним ходом еще не окончательно выровнено, то водитель включает заднюю передачу. Система управляет, по меньшей мере, одним исполнительным элементом так, что поворотные колеса автомобиля поворачиваются против направления изменения (в данном случае влево), например с максимальным углом поворота рулевого колеса. При последующем движении автомобиля задним ходом его положение продолжает выравниваться до заданного. В случае небольших парковочных мест может потребоваться попеременно совершать движения передним и задним ходом, чтобы выровнять автомобиль. Предложенная система дает то преимущество, что водитель полностью освобождается от необходимости совершения сложных движений рулевым колесом. Таким образом, водитель может полностью сконцентрироваться на наблюдении за окружающим пространством и регулировании скорости автомобиля. Кроме того, благодаря предложенной системе достигается то, что неопытный водитель при маневрировании случайно не заедет на парковочное место дальше, чем надо, т.е. его автомобиль не будет все плотнее приближаться к боковому ограничению парковочного места. Система помощи руления может использоваться также для вывода автомобиля с парковки. Автомобиль, припаркованный у правого края проезжей части параллельно ему, должен изменить свое положение влево. Поэтому система, как только она зарегистрирует активирующий сигнал и обнаружит направление изменения влево, при регистрации направления привода вперед повернет колеса влево, например с максимальным углом поворота рулевого колеса. При включении же задней передачи колеса поворачиваются в противоположном направлении, т.е. вправо, например с максимальным углом поворота рулевого колеса. За счет маневрирования за один или несколько заходов положение автомобиля может быть изменено в направлении изменения, так что автомобиль может затем выехать с парковочного места. Средства регистрации активирующего сигнала могут содержать, например, выключатель, с помощью которого водитель активирует систему. Точно так же возможно выполнение средств регистрации активирующего сигнала в виде интерфейса, с помощью которого принимается сигнал вышестоящей вспомогательной парковочной системы (системы помощи при парковке) или другого управляющего устройства. Интерфейс может быть выполнен в таком случае, например, в виде программного обеспечения. Система помощи руления при парковке может получать активирующий сигнал, например автоматически, от вспомогательной парковочной системы, которая паркует автомобиль за один заход на парковочном месте или предоставляет поддержку этого процесса, причем автомобиль по окончании процесса парковки не выровнен в заданном положении. Средства определения направления изменения могут содержать, например, также выключатель и/или тому подобное, с помощью которого водитель путем касания или нажатия выбирает направление, в котором должно происходить изменение заданного положения автомобиля. Однако средства могут быть выполнены и так, что они по фактически зарегистрированному положению автомобиля и заданному конечному положению определяют разность, а по ней - направление изменения. Средства определения направления изменения могут располагать далее памятью, в которой хранится информация, например о пройденном до сих пор пути или о прежнем процессе парковки.
Если автомобиль был припаркован, например, у правого края проезжей части параллельно ему, то из этой информации следует, что при повторном запуске двигателя и активировании системы водитель намерен выехать с парковочного места влево. Средства регистрации установленного направления привода содержат, например, датчик, который расположен на рычаге переключения передач механической коробки передач или на селекторе автоматической коробки передач и определяет положение рычага или селектора. Точно так же возможно расположение датчика на коробке передач.
Парковочное место нередко ограничено на своем переднем и/или заднем конце другим автомобилем. Поскольку положения этих других автомобилей могут изменяться, пока автомобиль запаркован, облегчается, в частности, выезд с парковочного места, если блок управления выполнен с возможностью регистрации и обработки информации о расстоянии от блока определения расстояний, которая включает в себя информацию об одном или нескольких расстояниях автомобиля до объектов, ограничивающих парковочное место, чтобы с помощью зарегистрированной информации о дистанции выработать и выдать рекомендацию о направлении привода. Если, например, расстояние автомобиля от ограничивающего объекта слишком мало для совершения маневра в направлении объекта, то водитель через устройство вывода получает информацию о маневрировании автомобиля в направлении движения от объекта. В случае устройства вывода речь может идти о любом устройстве отображения, например дисплее или сенсорном экране, или динамике, посредством которого выдается акустическая информация. Информация от блока управления нередко выдается через интерфейс посредством сигнала в электронном виде, который может быть обработан другой системой автомобиля и преобразован в аудиовизуальную информацию для водителя.
Особенно предпочтителен вариант, в котором блок определения расстояний содержит датчики измерения расстояний на передней и задней сторонах автомобиля, а информация о расстоянии включает в себя информацию о минимальном расстоянии автомобиля до переднего ограничения и минимальном расстоянии до заднего ограничения парковочного места. Благодаря этому даже в случаях, когда автомобиль стоит на парковочном месте, ограниченном с обеих сторон, можно предложить водителю соответствующее направление привода, в котором автомобиль может пройти максимальный путь при маневрировании. Этим достигается то, что число маневров может поддерживаться по возможности минимальным.
В другом предпочтительном варианте предусмотрено, что блок управления содержит компаратор для сравнения одного или нескольких расстояний по меньшей мере с одним пороговым значением расстояния и подается предупредительный сигнал, когда по меньшей мере одно расстояние или одно из нескольких расстояний меньше порогового значения расстояния. При этом предупредительный сигнал может быть разным в зависимости от расстояния больше или меньше порогового значения.
В одном варианте предусмотрено, что блок управления связан с тормозной системой автомобиля и посредством блока управления в случае расстояния меньше порогового значения происходит активное торможение и/или прекращается движение автомобиля, которое приводит к дальнейшему уменьшению расстояния или одного из нескольких расстояний. В этом варианте гарантировано, что автомобиль не коснется ограничивающих парковочное место объектов. Благодаря этому опасность столкновения при парковке заметно снижается или даже полностью устраняется.
В другом варианте блок управления может принимать сигналы от одного или нескольких датчиков, которые регистрируют состояния автомобиля и/или события, причем блок управления выполнен с возможностью обработки сигналов и влияния на функции системы помощи руления при парковке в зависимости от обработки. В еще одном варианте, например, предусмотрено, что сигналы включают в себя информацию о вмешательстве водителя в рулевое управление, а влияние на функции системы включает в себя ее дезактивирование при констатации вмешательства в рулевое управление. Как только водитель приводит в действие рулевое управление, система дезактивируется. Так, водитель, в частности в опасных ситуациях, может в любое время вмешиваться в рулевое управление, не препятствуя вмешательству системы в рулевое управление. Это позволяет водителю в любое время сохранять полный контроль над автомобилем. Возможно также, чтобы при вмешательстве водителя, вольно или невольно, подавался предупредительный сигнал и лишь после этого происходило отключение. При небольших вмешательствах, например случайном касании или притормаживании рулевого колеса, система продолжает процесс парковки. При этом, в случае необходимости, заданная парковочная траектория рассчитывается заново.
В еще одном варианте предусмотрено, что сигналы содержат информацию о скорости автомобиля, а влиянием на функции системы помощи руления при парковке является ее дезактивирование при превышении заданного значения скорости. Дополнительно, при необходимости, до достижения этого порогового значения может быть предусмотрено другое, по меньшей мере второе пороговое значение, при котором водитель уже информируется о возможном дезактивировании системы, если он продолжает повышать скорость. В зависимости от степени превышения другого порогового значения это предупреждение может варьироваться по интенсивности, т.е., например, при большем превышении выбирается более высокая интенсивность.
В частности, при выводе с парковки автомобиля может быть, например, предусмотрено, что водитель, как только автомобиль достигнет положения, которое позволяет ему выехать с парковочного места, делает это, причем скорость автомобиля приближается к нормальной скорости движения. Поскольку процессы парковки выполняются только с низкой скоростью, система может быть дезактивирована, как только будет превышена определенная скорость. Другие состояния автомобиля или события также могут быть зарегистрированы и использованы по отдельности или в комбинации, чтобы дезактивировать или активировать систему или повлиять на другие функции.
В особенно предпочтительном варианте блок управления содержит блок определения положения, который сравнивает фактическое положение автомобиля с заданным положением и при их совпадении управляет по меньшей мере одним исполнительным элементом так, что поворотные колеса поворачиваются в среднее положение. В этом варианте колеса, как только автомобиль достигнет своего заданного положения, поворачиваются в среднее положение, соответствующее прямолинейному движению автомобиля. Таким образом, по окончании процесса выравнивания автомобиль подготовлен к движению параллельно боковому ограничению парковочного места. За счет этого автомобиль может затем легко переместиться в среднее положение по отношению к длине парковочного места.
Нежелательных парковочных движений можно избежать в варианте, в котором сигналы содержат информацию о режиме движения и/или режиме торможения автомобиля, а влиянием на функции системы помощи руления при парковке является воспрепятствование управлению по меньшей мере одним исполнительным элементом, вызывающим максимальный поворот поворотных колес, когда автомобиль находится в движении и/или не заторможен. Так, например, в ситуациях, когда автомобиль катится назад и водитель при включенном сцеплении включает переднюю передачу, можно воспрепятствовать тому, что при движении назад система помощи руления при парковке уже приводит в действие по меньшей мере один исполнительный элемент, чтобы максимально повернуть колеса в другую сторону. В этом варианте система совершает движения, приводящие, например, к максимальному повороту рулевого колеса, только тогда, когда автомобиль затормаживается и/или неподвижен. В режиме движения автомобиля возможно лишь движение, переводящее колеса в среднее положение после выравнивания автомобиля.
Признаки способа эксплуатации системы помощи руления при парковке обладают теми же преимуществами, что и признаки самой системы.
Ниже изобретение более подробно поясняется с помощью предпочтительного примера его осуществления со ссылкой на чертежи, на которых показано:
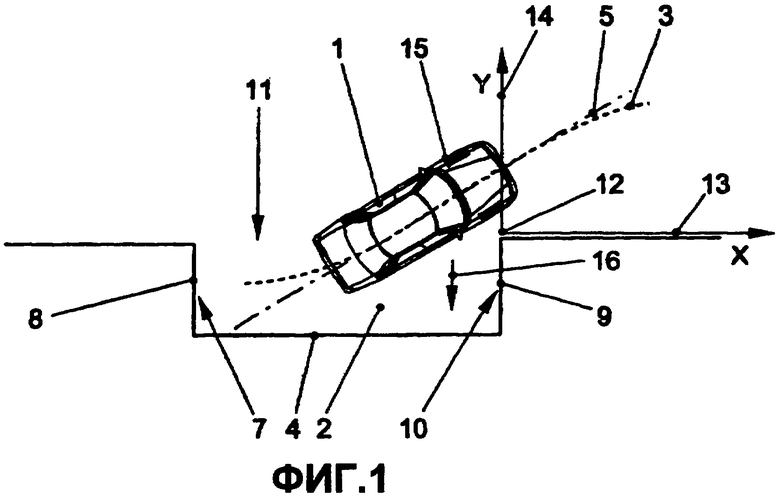
фиг.1: схематичный вид сверху парковочного места, автомобиля и заданной траектории его парковки;
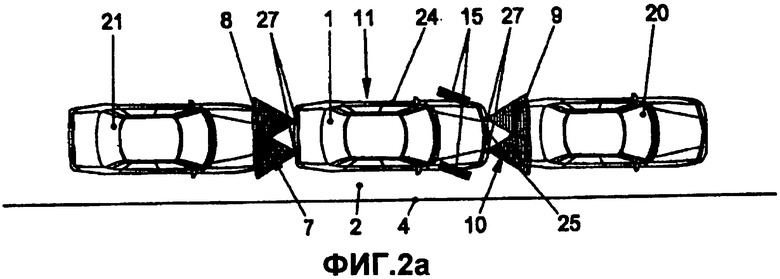
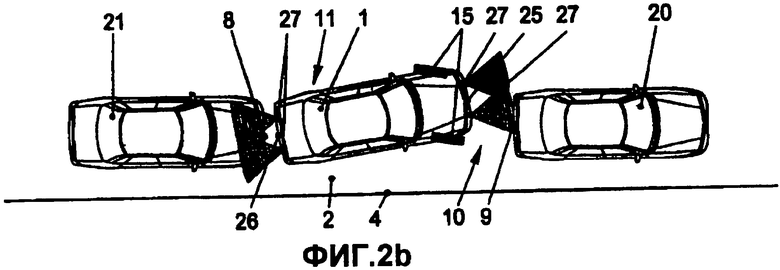
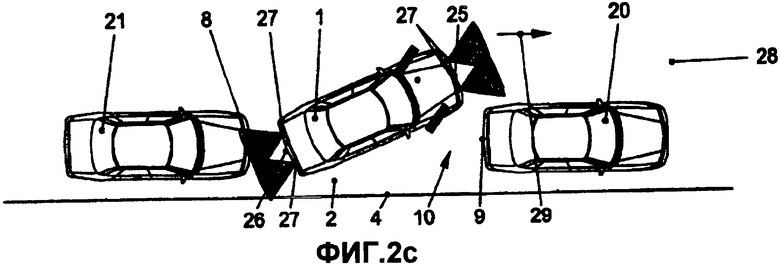
фиг.2а - 2с: схематично процесс выезда автомобиля с парковочного места;
фиг.3: схематично автомобиль с предложенной согласно изобретению системой.
На фиг.1 показан автомобиль 1 в процессе парковки на парковочном месте 2. Автомобиль 1 движется по определяемой парковочной системой парковочной траектории 3. Если протяженности парковочного места 2 вдоль бокового продольного ограничения 4 недостаточно, то автомобиль 1 нельзя разместить на нем так, чтобы продольная ось 5 автомобиля 1 по окончании процесса парковки за один заход была ориентирована параллельно боковому продольному ограничению 4 парковочного места 2.
На заднем конце 7 парковочное место 2 ограничено задним ограничением 8. Переднее ограничение 9 ограничивает парковочное место 2 на переднем конце 10. Заднее 8 и переднее 9 ограничения образованы, как правило, другими автомобилями. На открытой стороне 11, противоположной боковому продольному ограничению 4, парковочное место 2 свободно.
С парковочным местом 2 связана система 6 координат. Ее начало 12 совпадает с точкой пересечения противоположной открытой стороны 11 парковочного места 2 с продолжением его переднего ограничения 9. Ось Х 13 системы 6 координат параллельна боковому продольному ограничению 4 парковочного места 2. Положительное направление оси Х 13 указывает от заднего ограничения 8 к переднему ограничению 9 парковочного места 2. Система 6 координат является праворукой. Ось Y 14 системы 6 координат перпендикулярна, таким образом, боковому продольному ограничению 4 парковочного места 2. Положительное направление оси Y 14 указывает от бокового продольного ограничения 4 к противоположной открытой стороне 11 парковочного места 2. Положение автомобиля 1 можно определить по отношению к системе 6 координат путем определения угла между осью Х и продольной осью 5 автомобиля 1.
Если продольной протяженности парковочного места 2 вдоль его бокового продольного ограничения 4 недостаточно, то автомобиль 1 по окончании первого этапа парковки не может быть выровнен своей продольной осью 5 параллельно боковому продольному ограничению 4 парковочного места 2. В таком случае автомобилем 1 следует маневрировать на парковочном месте 2 для его выравнивания так, чтобы продольная ось 5 автомобиля 1 была параллельна боковому продольному ограничению 4. Для этого система помощи руления при парковке активируется парковочной системой. Активирование осуществляется преимущественно посредством электронного сигнала. Парковочная система передает системе помощи руления при парковке направление изменения. Положение автомобиля следует изменить так, чтобы его продольная ось 5 была параллельна боковому продольному ограничению 4 парковочного места 2. С помощью датчиков, расположенных на рычаге переключения передач или на механической коробке передач или селекторе автоматической коробки передач, регистрируется выбранное или установленное направление движения. Блок управления системы помощи руления при парковке управляет исполнительным элементом, который может поворачивать поворотные колеса 15 автомобиля 1. Если в качестве направления привода зарегистрирована включенная передняя передача или направление движения передним ходом, то поворотные колеса 15 максимально поворачиваются в направлении, соответствующем направлению изменения. В примере на фиг.1 это означает для автомобиля 1, который находится по окончании процесса парковки на заднем конце 7 парковочного места 2 в еще не выровненном положении, что поворотные передние колеса 15 поворачиваются максимально вправо, поскольку направление изменения правое, как это обозначено стрелкой 16. Затем водитель подает вперед. Это происходит до тех пор, пока продольная ось 5 автомобиля не будет параллельна боковому продольному ограничению 4 парковочного места 2 или автомобиль не будет находиться на его переднем конце 10. В последнем случае водитель включает заднюю передачу, в результате чего регистрируется направление привода назад. Блок управления управляет исполнительным элементом так, что поворотные передние колеса 15 поворачиваются против направления изменения, т.е. максимально влево. Водитель сдает затем назад. Подавать вперед и сдавать назад можно попеременно до тех пор, пока продольная ось 5 автомобиля не будет параллельна боковому ограничению 4 парковочного места 2. Как только продольная ось 5 автомобиля будет параллельна боковому ограничению 4 парковочного места 2, блок управления будет управлять исполнительным элементом так, что поворотные передние колеса 15 повернутся в среднее положение, соответствующее положению при движении автомобиля 1 по прямой. Таким образом, водитель может расположить автомобиль 1 посередине парковочного места 2.
На фиг.2а - 2с поясняется принцип действия системы помощи руления при парковке при выезде с парковочного места 2.
Технически одинаковые признаки обозначены на всех фигурах одинаковыми ссылочными позициями. Автомобиль 1 находится на парковочном месте 2, ограниченном на переднем конце 10 автомобилем 20. Заднее ограничение 8 образовано автомобилем 21. Боковое продольное ограничение 4 парковочного места 2 образовано бортовым камнем 22. После запуска двигателя водитель, нажав на рычаг включения указателя поворота, который активирует сигнал изменения направления движения на стороне 24 автомобиля 1, указывающей к открытой стороне 11 парковочного места 2, сигнализирует о том, что он хочет выехать с него влево. За счет этого активируется система помощи руления при парковке. С помощью блока определения расстояний, который обрабатывает измеренные данные датчиков 27 расстояний, расположенных на передней 25 и задней 26 сторонах автомобиля 1, определяется его расстояние до переднего 9 и заднего 8 ограничений парковочного места 2. Датчики 27 выполнены преимущественно в виде ультразвуковых датчиков. Однако могут использоваться и любые другие датчики расстояний, например радарные, лазерные и т.д.
Блок управления определяет по информации о расстоянии блока определения расстояний, больше ли расстояние перед автомобилем 1 до переднего ограничения 9 или расстояние за автомобилем 1 до заднего ограничения 8 парковочного места 2. Блок подачи сообщает водителю о предпочтительном направлении движения. Блок подачи может быть выполнен визуальным или акустическим и через шину находится в информационно-технической связи с блоком управления. В данном случае система дает водителю рекомендацию выбрать сначала направление привода назад. В ответ на это водитель включает заднюю передачу. Это установление направления привода назад регистрируется системой помощи руления при парковке, после чего блок управления начинает управлять исполнительным элементом, который поворачивает поворотные колеса 15 максимально вправо. Это направление противоположно направлению изменения, которое указывает влево и обозначено стрелкой 16. Водитель сдает автомобиль 1 назад в положение на фиг.2b.
Компаратор сравнивает расстояние автомобиля 1 до переднего 9 и заднего 8 ограничений парковочного места 2. Если пороговое значение расстояния меньше заданного, то устройство вывода выдает предупреждение. Оно может содержать информацию о фактическом расстоянии. Например, сначала может подаваться прерывистый предупредительный сигнал, который при уменьшении расстояния автомобиля 1 до переднего ограничения 9 или до заднего ограничения 8 становится непрерывным. В ответ на это водитель останавливает автомобиль 1. Затем включается передняя передача. Система регистрирует, что установлено другое направление привода. Вслед за этим блок управления управляет исполнительным элементом так, что передние поворотные колеса 15 поворачиваются максимально влево, что соответствует направлению, в котором должно произойти изменение положения автомобиля 1. После этого водитель подает автомобиль 1 вперед. При этом достигается его положение, которого достаточно для выезда с парковочного места 2 за один заход без трудностей. Таким образом, водитель будет двигаться по траектории 28 и увеличивать скорость автомобиля 1. Чтобы выровнять его в направлении 29 движения параллельно дороге, водитель должен поворачивать рулевое колесо. При превышении заданной скорости, например 10 км/ч, система помощи руления при парковке автоматически дезактивируется. Точно так же вмешательство водителя в рулевое направление приводит к дезактивированию системы.
На фиг.3 схематично изображен автомобиль 1 с системой 30 помощи руления при парковке. Он содержит задние колеса 32 и поворотные передние колеса 15. Последние могут поворачиваться посредством системы 34 рулевого управления, включающей в себя рулевое колесо 36. Дополнительно поворотные передние колеса 15 могут поворачиваться посредством исполнительного элемента 38. Он может управляться блоком 40 управления системы 30 помощи руления при парковке. В случае исполнительного элемента 38 речь может идти об элементе системы 34 рулевого управления, который используется, например, для поддержания поворота рулевого колеса 36. Система 30 помощи руления при парковке содержит средства 42 регистрации активирующего сигнала. Они имеют вход 43 и выход 44, которые соединены с выключателем 45. При замыкании выключателя 45 создается электрическое соединение между входом 43 и выходом 44. Таким образом, средства приема активирующего сигнала принимают его и активируют систему 30 помощи руления при парковке.
Посредством переключателя 46 водитель может устанавливать направление, в котором с помощью системы 30 должно изменяться положение автомобиля 1. Переключатель 46 соединен со средствами 47 определения направления изменения. В данном примере средства 47 выполнены так, что они имеют один дополнительный выход 48 и два дополнительных входа 49. При включенном переключателе 46 создается электрическое соединение между ними. В зависимости от того, на каком из входов 49 регистрируется сигнал, устанавливается направление изменения. В других вариантах средства определения направления изменения могут обрабатывать также сигналы различных датчиков и/или информацию различных управляющих устройств автомобиля, чтобы с помощью заданных критериев самостоятельно и автоматически определить, в каком направлении должно быть изменено положение. Если автомобиль располагает, например, дополнительным парковочным устройством, которое позволяет разместить его задним ходом за один заход на параллельном парковочном месте, то информация от этого парковочного устройства может использоваться для определения направления изменения. Точно так же могут регистрироваться и записываться в память измеренные данные режима движения, чтобы с помощью этих данных определять направление изменения. Это, в частности, помогает тогда, когда система помощи руления при парковке должна использоваться для выезда с парковочного места. При активировании системы после парковки автомобиля направление изменения может быть выведено, как правило, из данных предыдущего процесса парковки. Если автомобиль был припаркован, например, у правого края проезжей части на парковочном месте, то в процессе парковки направление изменения было правым. Для выезда с парковочного места направление изменения должно быть, следовательно, левым.
Средства 50 регистрации установленного направления привода связаны с датчиком 52 на селекторе 54 автоматической коробки передач. Датчик 52 регистрирует положение селектора 54.
Автомобиль 1 располагает также блоком 56 определения расстояний. Этот блок 56 содержит датчики 27 расстояний, расположенные на передней 25 и задней 26 сторонах автомобиля 1. Блок 56 определяет расстояния от объектов, ограничивающих парковочное место, на котором паркуется и с которого выезжает автомобиль. Блок 40 управления выполнен так, что он может принимать и обрабатывать информацию о расстояниях блока 56. С помощью принятой информации о расстояниях блок 40 предоставляет рекомендацию о направлении движения, в котором автомобиль 1 при маневрировании должен предпочтительно двигаться для своего выравнивания. Для этого блок 40 предоставляет рекомендацию о направлении привода, выдаваемую устройством 60 выдачи. Устройство 60 выдачи может быть выполнено в виде любого аудиовизуального устройства. Он находится в информационно-технической связи через систему 62 шин с блоком 40 управления системы 30 помощи руления при парковке, как исполнительный элемент 38 и блок 56. Блок 40 управляет исполнительным элементом 38 в зависимости от зарегистрированного установленного направления привода и определенного направления изменения.
Во избежание столкновения автомобиля 1 с передним или задним ограничением парковочного места блок 40 связан через систему 62 шин с тормозной системой 64. Если блок 40 посредством компаратора 66 с помощью информации о расстоянии определит, что расстояние до объекта, ограничивающего парковочное место, меньше порогового значения, то блок 40 может, во-первых, выдать через устройство 60 выдачи предупреждение и/или, во-вторых, активно затормозить автомобиль 1 с помощью тормозной системы 64. Кроме того, может быть предусмотрено, что блок 40 может управлять исполнительным элементом 38 для максимального поворота передних колес 15 только тогда, когда автомобиль 1 заторможен. Колесный импульсный датчик 68 передает информацию о скорости на блок 40, так что при превышении заданной скорости, например 10 км/ч, система 30 помощи руления при парковке может быть дезактивирована. В системе 34 рулевого управления предусмотрен дополнительный датчик 70, с помощью которого можно обнаруживать вмешательства водителя в рулевое управление. Если будет установлено, что водитель вращает рулевое колесо, когда система 30 активна, то она автоматически дезактивируется.
При парковке автомобиля 1 блок 72 определения положения определяет, совпадает ли актуальное положение автомобиля с заданным. Блок 72 соединен с блоком 40 через систему 62 шин, в результате чего блок 40 может управлять исполнительным элементом 38 так, что поворотные колеса 15 поворачиваются в среднее положение, когда фактическое положение автомобиля совпадает с заданным.
Исполнительный элемент, устройство выдачи, блок определения расстояний, а также датчики и выключатели описаны в данном примере как самостоятельные компоненты автомобиля. Выключатели могут быть интегрированы в управляющие устройства, соединенные через систему шин с блоком управления. Точно так же могут использоваться другие средства регистрации. Однако существуют также варианты, в которых эти компоненты полностью или частично в произвольной комбинации являются неотъемлемыми составными частями системы. При этом не играет роли то, что отдельные компоненты расположены в разных местах автомобиля.
Отдельные составные части системы помощи руления при парковке полностью или частично могут быть выполнены в виде аппаратного и/или программного обеспечения и по меньшей мере частично интегрированы в управляющее устройство с программируемым вычислительным устройством.
Приведенные выше примеры описывают парковку автомобиля на парковочном месте у правого края проезжей части. Разумеется, это аналогичным образом относится к его парковке на парковочном месте у левого края проезжей части.
Перечень ссылочных позиций
1 - автомобиль
2 - свободное парковочное место
3 - парковочная траектория
4 - боковое продольное ограничение парковочного места
5 - продольная ось автомобиля
6 - система координат
7 - задний конец парковочного места
8 - заднее ограничение парковочного места
9 - переднее ограничение парковочного места
10 - передний конец парковочного места
11 - противоположная открытая сторона парковочного места
12 - начало
13 - ось Х
14 - ось Y
15 - поворотные передние колеса
16 - стрелка, обозначающая направление изменения
20 - другой автомобиль
21 - другой автомобиль
22 - бортовой камень
24 - сторона автомобиля
25 - передняя сторона автомобиля
26 - задняя сторона автомобиля
27 - датчики расстояний
28 - проезжая часть
29 - направление движения
30 - система помощи руления при парковке
32 - задние колеса
34 - система рулевого управления
36 - рулевое колесо
38 - исполнительный элемент
40 - блок управления
42 - средства регистрации активирующего сигнала
43 - вход средств регистрации активирующего сигнала
44 - выход средств регистрации активирующего сигнала
45 - выключатель
46 - переключатель
47 - средства определения направления изменения
48 - дополнительный выход средств определения направления изменения
49 - дополнительные входы средств определения направления изменения
50 - средства регистрации установленного направления привода
52 - датчик на селекторе автоматической коробки передач
54 - селектор автоматической коробки передач
56 - блок определения расстояний
60 - устройство выдачи
62 - система шин автомобиля
64 - тормозная система
66 - компаратор
68 - колесный импульсный датчик
70 - дополнительный датчик в системе рулевого управления
72 - блок определения положения
Изобретение относится к системе помощи руления при парковке и к способу ее эксплуатации, которые способствуют выравниванию автомобиля на парковочном месте. Полуавтоматическая система содержит средства регистрации активирующего сигнала, средства (47) определения направления изменения и блок (40) управления. Блок управления выполнен с возможностью управления одним исполнительным элементом (38) в активном состоянии системы таким образом, что поворотные колеса (15) автомобиля поворачиваются в направлении изменения, если установлено направление привода вперед, и против направления изменения, если установлено направление привода назад. Блок (40) управления выполнен с возможностью приема сигналов от одного или нескольких датчиков (68, 70) регистрации состояний автомобиля и/или событий и обработки сигналов и оказания влияния на функции системы помощи руления при парковке в зависимости от обработки сигналов. Сигналы содержат информацию о скорости автомобиля, а влиянием на функции системы помощи руления при парковке является ее дезактивирование при превышении заданного значения скорости. При осуществлении способа регистрируют активирующий сигнал, определяют направления изменения, в котором должно быть изменено положение автомобиля, и управляют одним исполнительным элементом (38) в активном состоянии системы. Достигается создание способа, который позволяет водителю получить лучшую поддержку при выравнивании автомобиля при парковке. 2 н. и 16 з.п. ф-лы, 5 ил.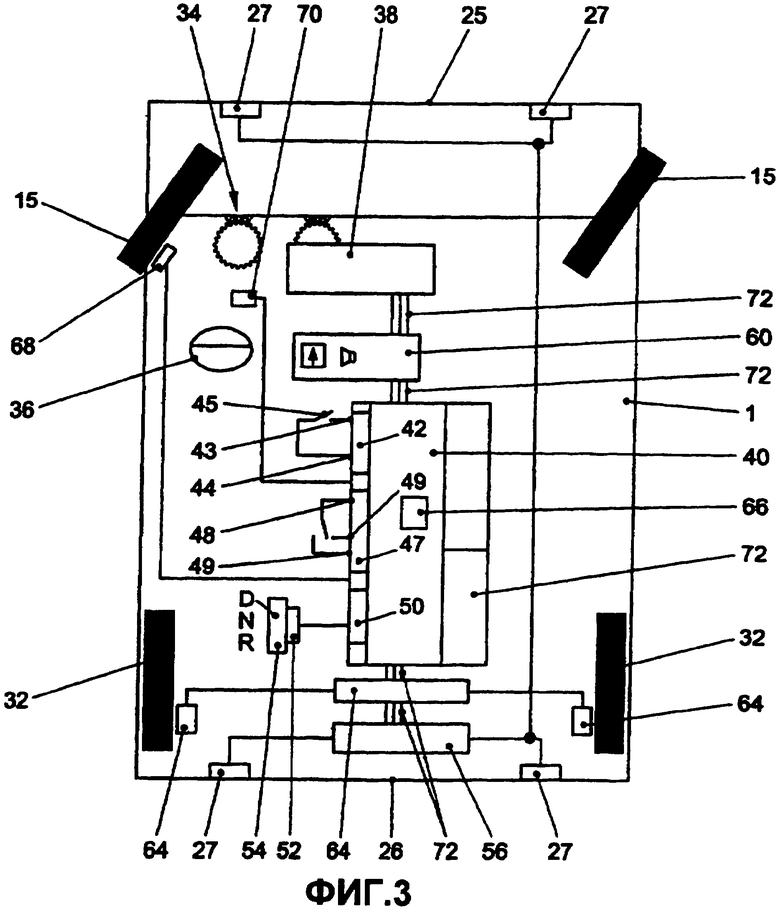
1. Полуавтоматическая система (30) помощи руления при парковке автомобиля (1) для выравнивания его положения на парковочном месте (2), содержащая средства (46) регистрации активирующего сигнала, средства (47) определения направления изменения, в котором должно быть изменено положение автомобиля (1) и блок (40) управления, выполненный с возможностью управления по меньшей мере одним исполнительным элементом (38) в активном состоянии системы (30) таким образом, что поворотные колеса (15) автомобиля (1) поворачиваются в направлении изменения, если установлено направление привода вперед, и против направления изменения, если установлено направление привода назад, причем блок (40) управления выполнен с возможностью приема сигналов от одного или нескольких датчиков (68, 70), регистрирующих состояния автомобиля и/или событий, причем блок (40) управления выполнен с возможностью обработки сигналов и оказания влияния на функции системы (30) помощи руления при парковке в зависимости от обработки сигналов, причем сигналы содержат информацию о скорости автомобиля (1), а влиянием на функции системы (30) помощи руления при парковке является ее дезактивирование при превышении заданного значения скорости.
2. Система по п.1, отличающаяся тем, что блок (40) управления выполнен с возможностью управления по меньшей мере одним исполнительным элементом (38) таким образом, что поворотные колеса (15) автомобиля (1) поворачиваются по существу максимально в направлении изменения, если установлено направление привода вперед, и по существу максимально против направления изменения, если установлено направление привода назад.
3. Система по п.1 или 2, отличающаяся тем, что блок (40) управления выполнен с возможностью регистрации и обработки информации о расстояниях из блока (56) определения расстояний, содержащей информацию об одном или нескольких расстояниях автомобиля (1) до объектов, ограничивающих парковочное место (2), для определения и выдачи с помощью зарегистрированной информации о расстояниях рекомендации о направлении привода.
4. Система по п.3, отличающаяся тем, что блок (56) определения расстояний содержит датчики измерения расстояний на передней стороне (25) и задней стороне (26) автомобиля (1), а информация о расстояниях содержит информацию по меньшей мере об одном расстоянии автомобиля (1) до переднего ограничения и по меньшей мере об одном расстоянии до заднего ограничения парковочного места (2).
5. Система по п.3, отличающаяся тем, что блок (40) управления содержит компаратор (66) для сравнения расстояния или нескольких расстояний, по меньшей мере, с одним пороговым значением расстояния, и подается по меньшей мере один предупредительный сигнал, если расстояние или одно из нескольких расстояний меньше порогового значения расстояния.
6. Система по п.5, отличающаяся тем, что блок (40) управления связан с тормозной системой автомобиля (1) с возможностью активного торможения и/или предотвращения движения автомобиля (1), которое приводит к дальнейшему уменьшению расстояния или одного из нескольких расстояний.
7. Система по п.1, отличающаяся тем, что сигналы содержат информацию о вмешательстве водителя автомобиля (1) в рулевое управление, а влиянием на функции системы (30) помощи руления при парковке является ее дезактивирование при установке вмешательства в рулевое управление.
8. Система по п.1, отличающаяся тем, что блок (40) управления содержит блок (72) определения положения, выполненный с возможностью сравнения фактического положения автомобиля (1) с заданным положением, и управления по меньшей мере одним исполнительным элементом (38) при совпадении фактического положения с заданным положением для поворота поворотных колес (15) по существу в среднее положение.
9. Система по п.1, отличающаяся тем, что сигналы содержат информацию о режиме движения и/или режиме торможения автомобиля (1), а влиянием на функции системы (30) является воспрепятствование управлению по меньшей мере одним исполнительным элементом (38) для поворота поворотных колес (15), когда автомобиль (1) находится в движении и/или незаторможен.
10. Способ эксплуатации полуавтоматической системы (30) помощи руления при парковке автомобиля (1) для выравнивания его положения на парковочном месте (2), при осуществлении которого регистрируют активирующий сигнал, определяют направление изменения, в котором должно быть изменено положение автомобиля (1), управляют по меньшей мере одним исполнительным элементом (38) в активном состоянии системы (30) таким образом, что поворотные колеса (15) автомобиля (1) поворачиваются в направлении изменения, если установлено направление привода вперед, и против направления изменения, если установлено направление привода назад, причем посредством блока (40) управления принимают сигналы от одного или нескольких датчиков, посредством которых регистрируют состояния автомобиля и/или события, обрабатывают сигналы и в зависимости от их обработки влияют на функции системы (30), причем сигналы содержат информацию о скорости автомобиля (1), а посредством блока (40) управления оказывают влияние на функции системы (30) помощи руления при парковке, дезактивируя ее при превышении заданного значения скорости.
11. Способ по п.10, отличающийся тем, что управление по меньшей мере одним исполнительным элементом (38) посредством блока (40) управления в активном состоянии системы (30) осуществляют таким образом, что поворотные колеса (15) автомобиля (1) поворачиваются по существу максимально в направлении изменения, если установлено направление привода вперед, и против направления изменения, если установлено направление привода назад.
12. Способ по п.10 или 11, отличающийся тем, что посредством блока (56) определения расстояний определяют информацию о расстояниях, содержащую информацию об одном или нескольких расстояниях автомобиля (1) от объектов, ограничивающих парковочное место (2), и посредством блока (40) управления определяют и выдают рекомендацию о направлении привода, основанную на информации о расстояниях.
13. Способ по п.12, отличающийся тем, что посредством компаратора (66) блока (40) управления расстояние или несколько расстояний сравнивают с пороговым значением расстояния и подают предупредительный сигнал, если расстояние или одно из нескольких расстояний меньше порогового значения.
14. Способ по п.13, отличающийся тем, что блок (40) управления связан с тормозной системой автомобиля (1) и посредством него при расстоянии меньше порогового значения осуществляют активное торможение и/или предотвращают движение автомобиля (1), приводящее к дальнейшему уменьшению расстояния или одного из нескольких расстояний.
15. Способ по п.10, отличающийся тем, что сигналы содержат информацию о вмешательстве водителя в рулевое управление автомобиля (1), а посредством блока (40) управления оказывают влияние на функции системы (30), дезактивируя ее при установлении вмешательства в рулевое управление.
16. Способ по п.10, отличающийся тем, что сигналы содержат информацию о режиме движения и/или режиме торможения автомобиля (1), а посредством блока (40) управления оказывают влияние на функции системы (30), препятствуя управлению по меньшей мере одним исполнительным элементом (38) для достижения поворота поворотных колес (15), когда автомобиль (1) находится в движении и/или незаторможен.
17. Способ по п.12, отличающийся тем, что блок (56) определения расстояний содержит датчики измерения расстояний на передней стороне (25) и задней стороне (26) автомобиля (1), а информация о расстояниях содержит информацию о минимальном расстоянии автомобиля (1) до переднего ограничения и о минимальном расстоянии до заднего ограничения парковочного места (2).
18. Способ по п.10, отличающийся тем, что блок (40) управления содержит блок (72) определения положения, посредством которого сравнивают фактическое положение автомобиля (1) с заданным положением, и при совпадении фактического положения с заданным положением управляют по меньшей мере одним исполнительным элементом (38) таким образом, что поворотные колеса (15) поворачиваются в среднее положение.
| DE 10250021 A1, 13.05.2004 | |||
| US 2004020699 A1, 05.02.2004 | |||
| US 6154695 A, 28.11.2000 | |||
| КОМПОЗИЦИЯ ПОРОШКООБРАЗНОГО НИТРАТА КАЛЬЦИЯ ДЛЯ УДОБРИТЕЛЬНОГО ОРОШЕНИЯ, ВКЛЮЧАЮЩАЯ ПИТАТЕЛЬНЫЕ МИКРОВЕЩЕСТВА НА ОСНОВЕ НИТРАТОВ, И СПОСОБ ЕЕ ПОЛУЧЕНИЯ | 2017 |
|
RU2728859C2 |
| DE 10256770 A1, 17.06.2004 | |||
| Топка для совместного сжигания угольной мелочи и горючего газа | 1927 |
|
SU12676A1 |

