Предлагаемая система относится к коммунальному хозяйству и может использоваться для дистанционного контроля за переполнением и возгоранием мусорных контейнеров, а также контроля мест загрузки и опорожнения контейнеров при сборе мусора как на автомобили-мусоросборщики с помощью засыпных устройств, так и при транспортировке контейнеров с мусором на автомобилях в места утилизации мусора.
Известны способы и устройства для уборки мусора, регистрирующие вес мусора, в частности бытового и промышленного мусора, а также снабженные блоками идентификации и кодовыми замками (авт. свид. СССР №№1000547, 1252468, 1776744; патенты РФ №№2002020, 2037046, 2186919, 2240414; патенты США №№4831860, 5209088; патенты Великобритании №№2141774, 2261254; патенты Франции №№2197406, 2559193, 2692309; патенты ФРГ №№3407128, 3907326; заявка DЕ №3332059; патенты Японии №№59-192167, 60-29912 и др.).
Из известных устройств наиболее близким к предлагаемой системе является «Блок идентификации для мусорного контейнера» (патент РФ №2040452, B65F 1/14, 1990), который и выбран в качестве прототипа.
Известный блок идентификации для мусорного контейнера опорожняется с помощью разгрузочных или засыпных устройств в автомобиль-мусоросборник, а также взвешивается на разгрузочном или засыпном устройстве до и после процесса опорожнения для определения веса содержащегося в контейнере мусора, мусорный контейнер снабжен датчиком системы опознавания, который корреспондируется с бортовой системой идентификации автомобиля-мусоросборщика, которой снабжено разгрузочное или засыпное устройство. С целью долговременной и надежной работы блока идентификации датчик системы опознавания размещен в гнезде во фланцевом элементе жестокости или выступе для зацепления захватом засыпного устройства, выполненном на мусорном контейнере, и/или закрыт со всех сторон.
Однако в условиях мегаполиса необходима оперативная информация в центральном пункте контроля о состоянии и местоположении мусорных контейнеров.
Технической задачей изобретения является расширение функциональных возможностей блока идентификации для мусорного контейнера путем определения местоположения мусорного контейнера и установления дуплексной радиосвязи между мусорными контейнерами и центральным пунктом контроля с использованием двух частот и сложных сигналов с фазовой манипуляцией.
Поставленная задача решается тем, что система для дистанционного контроля за мусорными контейнерами, содержащими блок идентификации, имеющими корпус с фланцевым элементом жесткости или выступом и датчиком системы опознавания, взаимодействующей с бортовой системой идентификации автомобиля-мусоросборщика, расположенной на разгрузочном или засыпном устройстве, опорожняемыми с помощью разгрузочных или засыпных устройств в автомобиль-мусоросборщик с возможностью взвешивания на разгрузочном или засыпном устройстве до и после процесса опорожнения для определения веса содержащегося в контейнере мусора, при этом во фланцевом элементе жесткости или внутри корпуса выполнено гнездо для размещения в нем датчика опознавания с возможностью закрытия последнего со всех сторон, отличается от ближайшего аналога тем, что она снабжена располагаемым на каждом из группы одновременно контролируемых мусорных контейнеров измерительно-передающим блоком, включающим в себя сигнальные датчики, приемник GPS-сигналов, блок преобразования информации, блок управления, дуплексер, приемо-передающую антенну, передатчик и приемник электромагнитного сигнала, а также автономный источник питания, при этом для размещения измерительно-передающего блока использовано гнездо, выполненное во фланцевом элементе жесткости или выступе корпуса, выходы сигнальных датчиков и приемника GPS-сигналов соединены с выходами блока преобразования информации, к выходу которого последовательно подключены передатчик, дуплексер, вход-выход которого связан с приемо-передающей антенной, приемник и блок управления, подключенный к блоку преобразования информации, и центральным пунктом контроля, расположенными в зоне уверенного приема электромагнитных сигналов и состоящим из ЭВМ с устройствами ввода и отображения информации и последовательно подключенными к ее выходу передатчиком электромагнитного сигнала, дуплексером, вход-выход которого связан с приемо-передающей антенной, и приемником электромагнитного сигнала, выход которого подключен к ЭВМ, при этом каждый передатчик электромагнитного сигнала выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, первого смесителя, второй вход которого соединен с первым выходом первого гетеродина, усилителя первой промежуточной частоты и первого усилителя мощности, выход которого соединен с входом дуплексера, каждый приемник электромагнитного сигнала выполнен в виде последовательно подключенных к выходу дуплексера второго усилителя мощности, второго смесителя, второй вход которого соединен с первым выходом второго гетеродина, усилителя второй промежуточной частоты, перемножителя, второй вход которого соединен с вторым выходом первого гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с вторым выходом второго гетеродина, а выход является выходом приемника, причем второй вход фазового манипулятора центрального пункта контроля соединен с выходом ЭВМ, а второй вход фазового манипулятора каждого контролируемого мусорного контейнера соединен с выходом блока преобразования информации, передатчик центрального пункта контроля выполнен с возможностью излучения сложных сигналов с фазовой манипуляцией на частоте ωГ1=ωГ2, а приемник - с возможностью приема сигналов на частоте ω2=ωГ1, передатчик каждого контролируемого мусорного контейнера выполнен с возможностью излучения сложных сигналов с фазовой манипуляцией на частоте ω2, а приемник - с возможностью приема сигналов на частоте ω1, частоты ωГ1 и ωГ2 первого и второго гетеродинов разнесены на значение второй промежуточной частоты ωГ2-ωГ1=ωпр2.
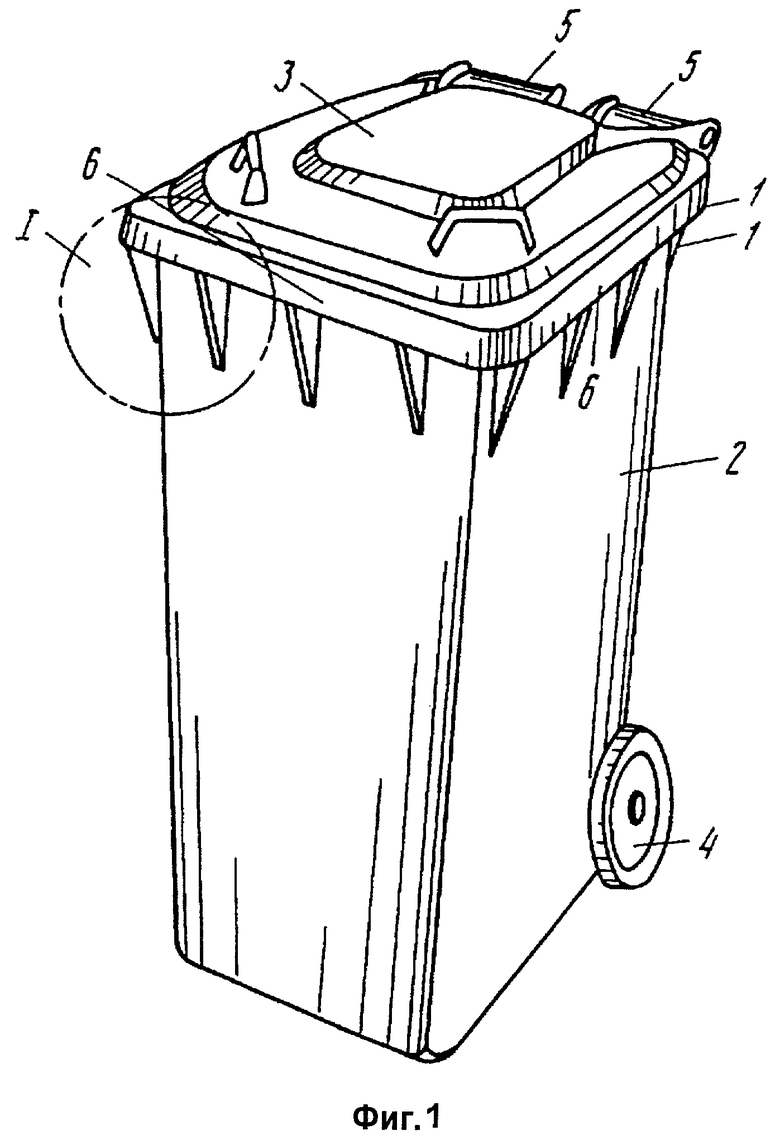
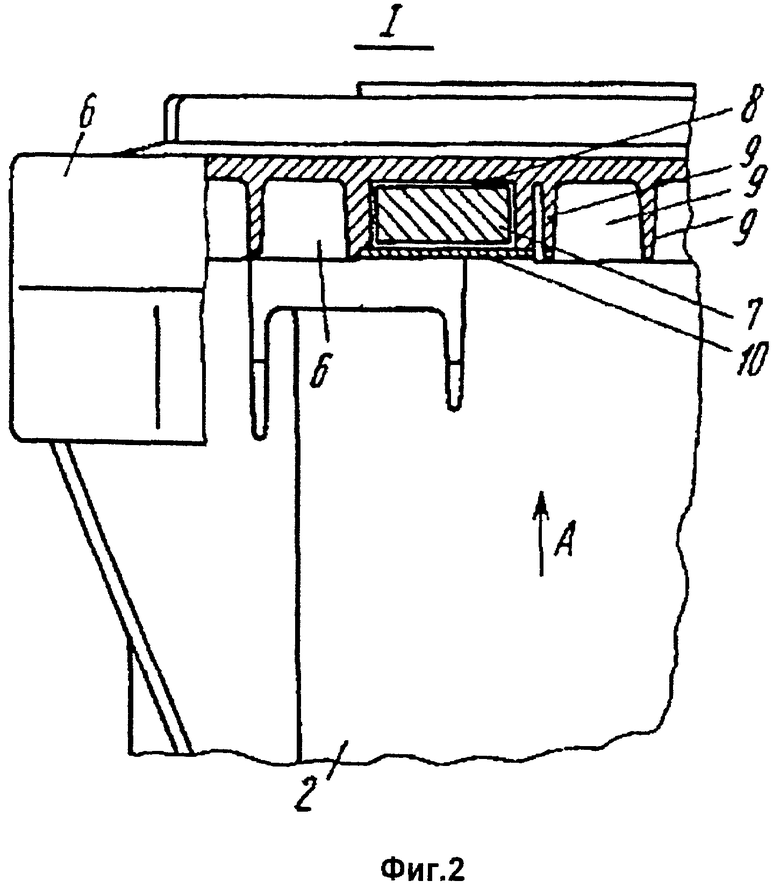
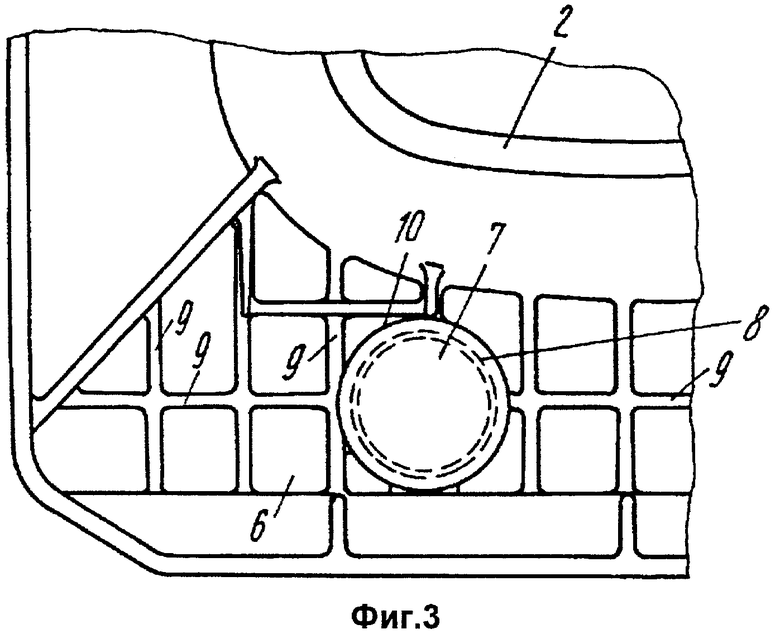
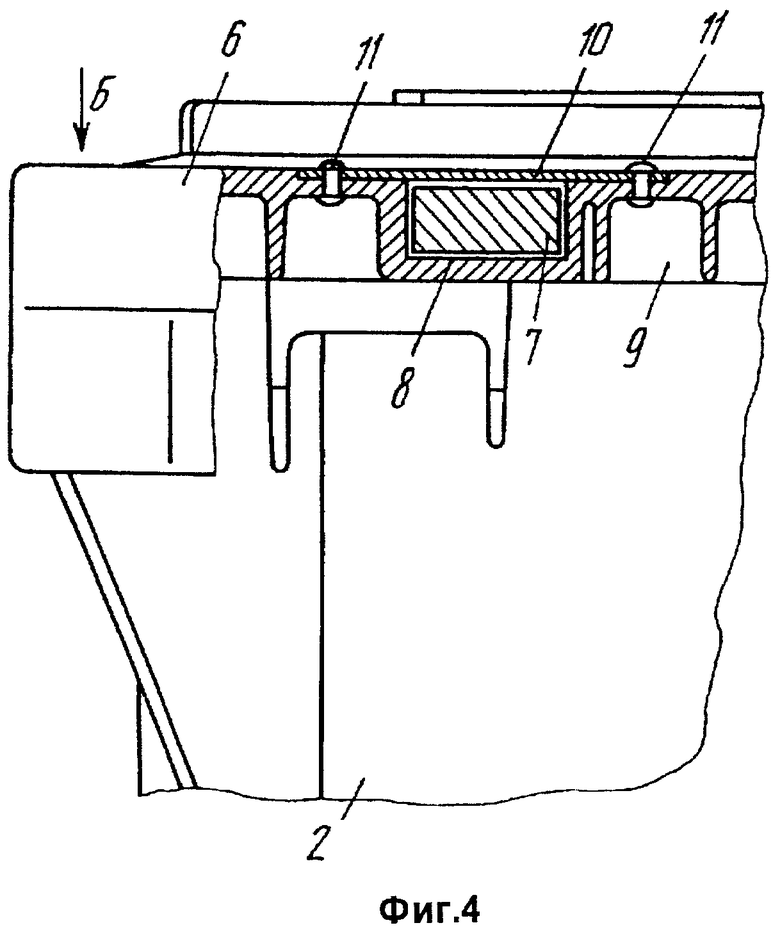
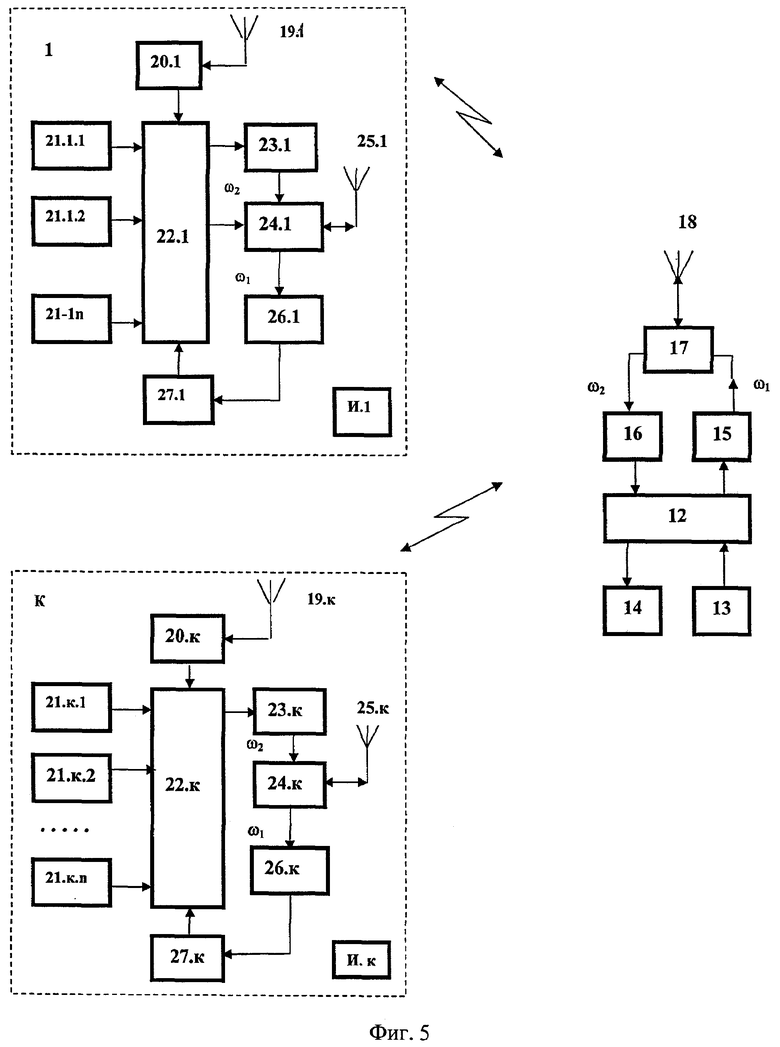
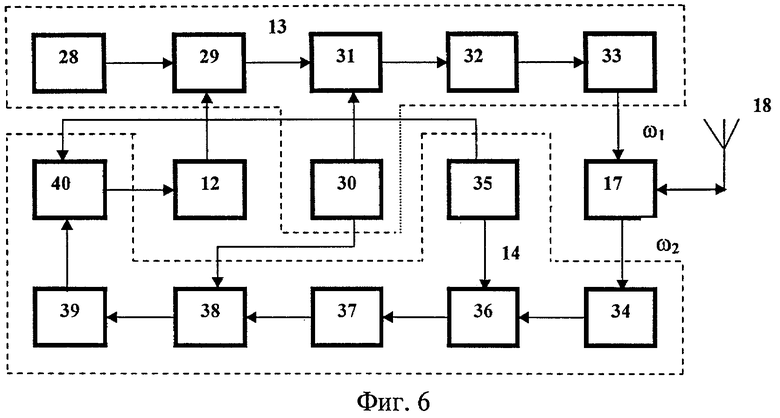
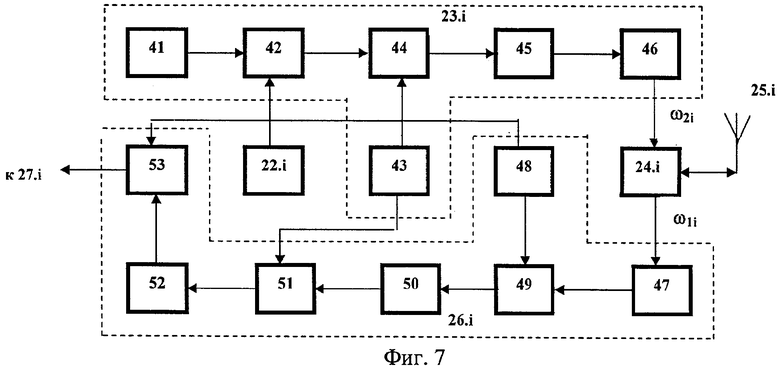
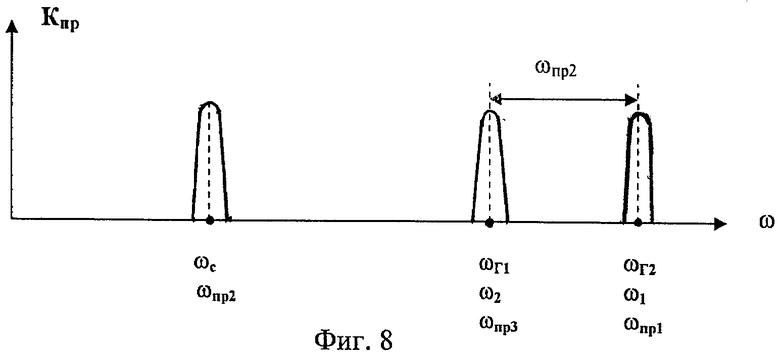
На фиг.1 изображен мусорный контейнер, предназначенный для взаимодействия с бортовым разгрузочным или засыпным устройством автомобиля-мусоросборщика, общий вид; на фиг.2 - узел I, изображенный на фиг.1, с приспособлением для идентификации согласно изобретению; на фиг.3 - вид по стрелке А на фиг.2; на фиг.4 - установка блока идентификации, встроенного по-иному, чем на фиг.2; на фиг.5 представлена структурная схема системы для дистанционного контроля за мусорными контейнерами; на фиг.6 изображена структурная схема передатчика и приемника центрального пункта контроля; на фиг.7 изображена структурная схема передатчика и приемника каждого контролируемого мусорного контейнера; на фиг.8 показана частотная диаграмма, поясняющая преобразование сигналов по частоте; на фиг.9 и 10 изображены временные диаграммы, поясняющие работу системы.
На фиг.1 показан мусорный контейнер 1, в котором емкость 2 для мусора сверху закрывается откидной крышкой 3. Снизу емкость 2 оборудована двумя ходовыми колесами 4 (показано только одно), расположенными по задней кромке.
Шарнирное соединение между крышкой 3 и емкостью 2 снабжено двумя ручками 5, которые позволяют перемещать при необходимости контейнер 1 с помощью колес 4.
По верхней стороне емкости для мусора предусмотрен фланцевый элемент жесткости или выступ 6 для зацепления засыпного устройства. В первую очередь этот элемент жесткости, т.е. выступ 6, служит для взаимодействия мусорного контейнера с разгрузочным или засыпным устройством автомобиля-мусоросборщика, которое, как правило, представляет собой подъемник-опрокидыватель.
Разгрузочное или засыпное устройство автомобиля-мусоросборщика захватывает контейнер 1 за выступ 6 на емкости 2 и производит разгрузку, включающую подъем, опрокидывание и опускание контейнера.
Теперь все чаще предъявляется требование последовательно фиксировать при разгрузке контейнера 1 в автомобиль-мусоросборщик вес брутто и тары, чтобы на основании этого определять вес нетто мусора, находящегося в соответствующем контейнере 1. Вместо обычной для настоящего времени округленной оплаты уборки мусора будет введена оплата в зависимости от веса мусора, что должно стимулировать уменьшение количества выбрасываемого мусора.
Для реализации такой оплаты уборки мусора в зависимости от его веса необходимо оборудовать не только автомобиль-мусоросборщик системой взвешивания отходов, но и снабдить мусорные контейнеры системой идентификации. Условием функционирования системы идентификации является оборудование каждого отдельного мусорного контейнера блоком идентификации, который позволил бы через систему идентификации автомобиля-мусоросборщика включать систему взвешивания отходов и одновременно приводить в действие разгрузочное или засыпное устройство, снабженное такой системой взвешивания.
Блок идентификации при этом должен располагаться на мусорном контейнере так, чтобы при манипуляциях с контейнером обеспечивалась связь блока с системой идентификации автомобиля-мусоросборщика. Необходимо также сделать так, чтобы блок идентификации было трудно удалить из контейнера или отделить от него. Блок идентификации должен быть выполнен так, чтобы при постоянном использовании он оставался нечувствительным к возникающим нагрузкам и отсутствовала возможность изменения его кода.
Блок идентификации на каждом мусорном контейнере 1 имеет датчик 7 системы опознавания, который размещается в гнезде 8 фланцевого элемента жесткости 6 на емкости 2 для мусора. При этом важно, чтобы датчик системы опознавания был защищен от ударов, например, путем размещения в мягкой обивке или с зазорами от окружающих его со всех сторон стенок гнезда 8 в закрытом со всех сторон состоянии.
Гнездо 8 может представлять собой стакано- или ваннообразную выемку, которая находится во фланцевом элементе жесткости (выступе для захвата засыпным устройством) 6 между ребрами жесткости 9, которые предназначены для усиления фланцевого элемента жесткости 6.
После установки датчика 7 в гнездо 8 последнее может быть закрыто крышкой 10. При этом крышка может быть приварена, приклеена, привинчена или поставлена на заклепки, чтобы удаление или замену датчика 7 можно было осуществлять только путем повреждения крышки 10 и/или фланцевого элемента жесткости 6.
На фиг.2 и 3 показан вариант фланцевого элемента жесткости 6, при котором гнездо 8 представляет собой стакано- или ваннообразную выемку с отверстием на нижней стороне фланцевого элемента жесткости 6, т.е. должно закрываться крышкой 10, устанавливаемой снизу. При этом крышка 10 жестко соединяется с краями гнезда 8 путем приклеивания и/или приваривания по всему периметру.
На фиг.4 стакано- или ваннообразная выемка, служащая гнездом 8 для датчика 7, выполнена во фланцевом элементе жесткости 6 с отверстием, открытым сверху. Отверстие также закрывается крышкой 10, устанавливаемой сверху. В этом случае крышка 10 жестко соединена с фланцевым элементом жесткости 6 с помощью заклепок 11.
Расположение датчика системы опознавания на мусорном контейнере 1 внутри фланцевого элемента жесткости 6 имеет то преимущество, что датчик может взаимодействовать с опрашивающим приемником расположенной на автомобиле системы идентификации, смонтированным непосредственно на захвате разгрузочного или засыпного устройства, который взаимодействует с фланцевым элементом жесткости.
Система для дистанционного контроля за мусорными контейнерами содержит центральный пункт контроля, состоящий из ЭВМ 12 с устройствами 13 и 14 ввода и отображения информации соответственно, передатчика 15 электромагнитного сигнала, приемника 16 электромагнитного сигнала, дуплексера 17 и приемо-передающей антенны 18, и регистраторы I, II, i, k параметров, располагаемых на мусорных контейнерах (i-номер мусорного контейнера, который может принимать значения от 1 до к, где к - общее число контролируемых контейнеров).
Выход приемника 16, представляющий собой шину стандартного интерфейса связи, соединен с выходом ЭВМ 12. Передатчик 15 также соединен шиной стандартного интерфейса связи с выходом ЭВМ 12.
В состав регистраторов I, II, i, k, располагаемых на мусорных контейнерах, входят сигнальные датчики 21.i.1 - 21.i.n, где n - общее количество датчиков, устанавливаемых на i-ом мусорном контейнере, приемник 20.i GPS-сигналов, блок 22.i преобразования информации, передатчик 23.i электромагнитного сигнала, дуплексер 24.i, приемо-передающая антенна 25i, приемник 26i электромагнитного сигнала, блок 27i управления и автономный источник питания И.i, например аккумуляторная батарея, i=1,…,K.
Выходы датчиков 21.1.1 - 21.1.n и приемника 20.i GPS-сигналов соединены с соответствующими входами блока 22.i преобразования информации, к выходу которого последовательно подключены передатчик 23.1, дуплексер 24.i, вход-выход которого связан с приемо-передаюшей антенной 25.i, приемник 26.i и блок 27.i управления, подключенный к блоку 22.i преобразования информации.
В качестве сигнальных датчиков используются контакты и кнопки, тензометрические и ультразвуковые датчики, которые фиксируют, например, погрузку-разгрузку контейнера, заполнение контейнера и возгорание мусора, вес контейнера до и после процесса опорожнения.
Основной функцией блока 22.i преобразования информации является преобразование аналоговых сигналов, соответствующих значениям измеряемых параметров, в последовательный двоичный код, который может модулировать излучаемый электромагнитный сигнал.
Приемник 20.i GPS-сигналов является неотъемлемым элементом глобальной радионавигационной спутниковой системы ГЛОНАСС (РФ) или НАВСТАР (США), состоящих из группировок спутников (18-24) и управляемых из единых центров, выполняется съемным и выпускается промышленностью в стандартной упаковке (прибор SDS-221). С помощью указанных радионавигационных систем обеспечивается вычисление координат местоположения мусорных контейнеров с точностью до 1 метра.
Каждый передатчик выполнен в виде последовательно включенных задающего генератора 28(41), фазового манипулятора 29(42), первого смесителя 31(44), второй вход которого соединен с первым выходом первого гетеродина 30(43), усилителя 32(45) первой промежуточной частоты и усилителя 33(46) мощности, выход которого подключен к входу дуплексера 17(24.i). При этом второй вход фазового манипулятора 29 центрального пункта контроля соединен с выходом ЭВМ 12, а второй вход фазового манипулятора 42 каждого контролируемого мусорного контейнера соединен с выходом блока 22 л преобразования информации.
Каждый приемник выполнен в виде последовательно подключенных к выходу дуплексера 17(24.i) усилителя 34(47) мощности, второго смесителя 36(49), второй вход которого соединен с первым выходом второго гетеродина 35(48), усилителя 37(50) второй промежуточной частоты, перемножителя 38(51), второй вход которого соединен с вторым выходом первого гетеродина 30(43), полосового фильтра 39(52) и фазового детектора 40(53), второй вход которого соединен с вторым выходом второго гетеродина 35(48). Выход фазового детектора 40 центрального пункта контроля подключен к входу ЭВМ 12, а выход фазового детектора 53 контролируемого мусорного контейнера подключен к блоку 27.i управления.
Для размещения измерительно-передающего блока мусорного контейнера использовано гнездо 8, выполненное во фланцевом элементе жесткости или выступе корпуса 6.
Предлагаемая система для дистанционного контроля за мусорными контейнерами работает следующим образом.
Рассмотрим в качестве примера два режима работы предлагаемой системы: а) режим работы по запросу; б) режим работы с общей синхронизацией.
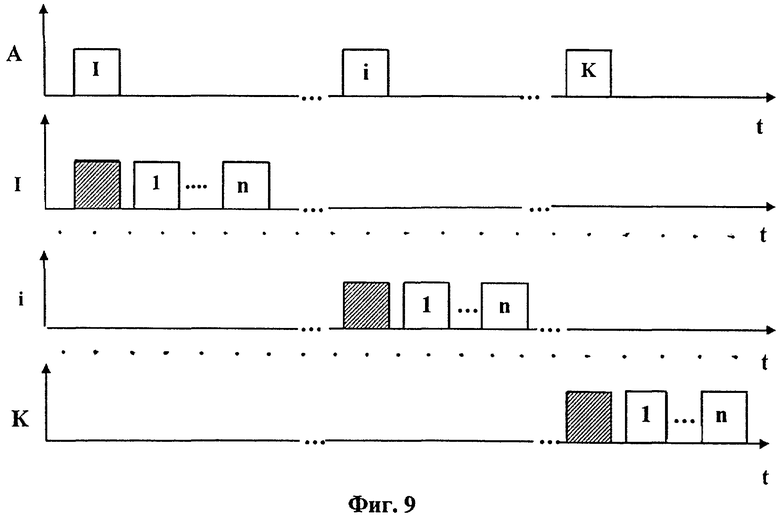
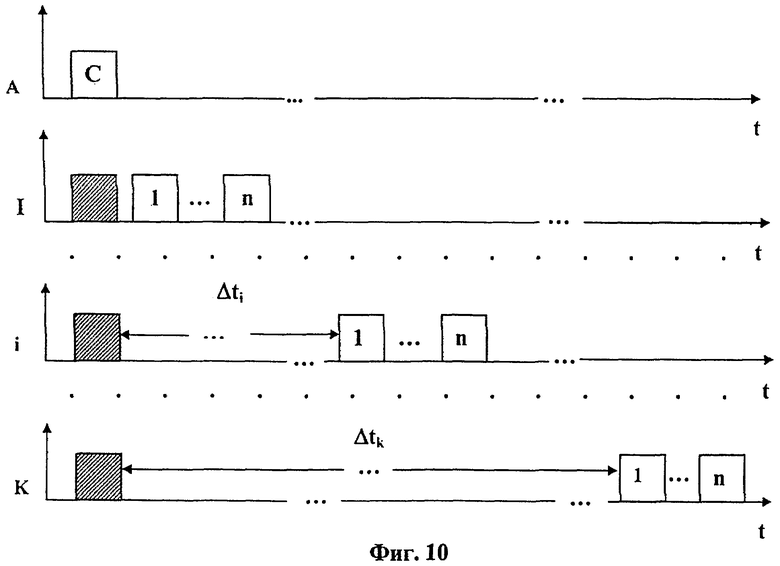
На фиг.9 приведены временные диаграммы, иллюстрирующие первый режим работы, на фиг.10 - второй режим. По оси абсцисс на всех диаграммах отложено время. На диаграммах А условно показаны командные кодовые посылки, передаваемые по командной линии радиосвязи от центрального пункта контроля в аппаратуру каждого мусорного контейнера.
Для этого задающий генератор 28 формирует гармоническое колебание

где Uc1, ωc, φc1, Tc1 - амплитуда, несущая частота, начальная фаза и длительность колебания;
которое поступает на первый вход фазового манипулятора 29, на второй вход которого подается модулирующий код M1(t) с выхода ЭВМ 12. В качестве модулирующего кода M1(t) может использоваться общий для всех мусорных контейнеров код или код i-го контролируемого мусорного контейнера. На выходе фазового манипулятора 29 формируется сложный сигнал с фазовой манипуляцией (ФМн)

где φk1(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t), причем φk1(t)=const при kτ∋<t<(k+1)τ∋ и может изменяться скачком при t=kτ∋, т.е. на границах между элементарными посылками (k=1,…,N);
τ∋,N - длительность и количество элементарных посылок, из
которых составлен сигнал длительностью Tc1(Tc1=Nτ∋);
который поступает на первый вход первого смесителя 31. На второй вход последнего подается напряжение первого гетеродина 30

На выходе смесителя 31 образуются напряжения комбинационных частот. Усилителем 32 выделяется напряжение первой промежуточной (суммарной) частоты:

где 
ωпр1=ωс+ωГ1 - первая промежуточная (суммарная) частота (фиг.8);
φпр1=φс1+φГ1.
Это напряжение после усиления в усилителе 33 мощности через дуплексер 17 поступает в приемо-передающую антенну 18, излучается ею в эфир на частоте ω1=ωпр1, улавливается приемо-передающей антенной 25.i i-го контролируемого мусорного контейнера и через дуплексер 24.i и усилитель 47 мощности поступает на первый вход смесителя 49, на второй вход которого подается напряжение uГ1(t) гетеродина 48. На выходе смесителя 49 образуются напряжения комбинационных частот. Усилителем 50 выделяется напряжение второй промежуточной (разностной) частоты:

где 
ωпр2=ω1-ωГ1 - вторая промежуточная (разностная) частота;
φпр2=φпр1-φГ1,
которое поступает на первый вход перемножителя 51. На второй вход перемножителя 51 подается напряжение гетеродина 43:

При этом частоты ωГ1 и ωГ2 гетеродинов разнесены на значение второй промежуточной частоты (фиг.8):
ωГ2-ωГ1=ωпр2.
На выходе перемножителя 51 образуется напряжение:

где 
которое выделяется полосовым фильтром 52 и поступает на первый (информационный) вход фазового детектора 53. На второй (опорный) вход фазового детектора 53 подается напряжение uГ1(t) гетеродина 48. На выходе фазового детектора 53 образуется низкочастотное напряжение:

где 
пропорциональное модулирующему коду M1(t). Это напряжение поступает в блок 27.i управления.
На диаграммах I, II, i, k показаны условно кодовые посылки, передаваемые по дуплексной радиосвязи от аппаратуры, расположенной на мусорном контейнере, в центральный пункт контроля. Каждой кодовой посылке, обозначенной на диаграммах арабскими цифрами, соответствует передаваемое значение измеряемого параметра.
В этом случае задающим генератором 41 также формируется гармоническое колебание:

которое поступает на первый вход фазового манипулятора 42, на второй вход которого подается модулирующий код M2(t) с выхода блока 22.i преобразования информации. В качестве модулирующего кода M2(t) используются кодовые посылки, соответствующие номеру мусорного контейнера, его местоположению, весу контейнера до и после опорожнения и т.д.
На выходе фазового манипулятора 42 образуется сложный ФМн-сигнал:

где φk2(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M2(t),
который поступает на первый вход смесителя 44, на второй вход которого подается напряжение uГ2(t) гетеродина 43. На выходе смесителя 44 образуются напряжения комбинационных частот. Усилителем 45 выделяется напряжение третьей промежуточной (разностной) частоты:

где 
 - третья промежуточная (разностная) частота;
- третья промежуточная (разностная) частота;
Это напряжение после усиления в усилителе 46 мощности через дуплексер 24.i поступает в приемо-передающую антенну 25.i, излучается ею в эфир на частоте ω2=ωпр3, улавливается приемо-передающей антенной 18 центрального пункта контроля и через дуплексер 17 и усилитель 34 мощности поступает на первый вход смесителя 36, на второй вход которого подается напряжение uГ2(t) гетеродина 35. На выходе смесителя 36 образуются напряжения комбинационных частот. Усилителем 37 выделяется напряжение второй промежуточной (разностной) частоты:

где 
 - вторая промежуточная (разностная) частота;
- вторая промежуточная (разностная) частота;
которое поступает на первый вход перемножителя 38, на второй вход которого подается напряжение uГ2(t) гетеродина 30. На выходе перемножителя 38 образуется напряжение:

где 
которое выделяется полосовым фильтром 39 и поступает на первый (информационный) вход фазового детектора 40. На второй (опорный) вход фазового детектора 40 подается напряжение uГ2(t) гетеродина 35. На выходе фазового детектора 40 образуется низкочастотное напряжение:

где 
пропорциональное модулирующему коду M2(t). Это напряжение поступает на вход ЭВМ 12.
При режиме работы по запросу (фиг.9) все командные кодовые посылки имеют различные значения: каждому контролируемому мусорному контейнеру присваивается свой код. Запуск программы опроса сигнальных датчиков, измеряющих параметры в аппаратуре контролируемого мусорного контейнера, производится после принятия командного кода и его расшифровки (на временных диаграммах этот момент времени обозначен заштрихованными прямоугольниками). Частота опроса каждого контролируемого мусорного контейнера составляет 400-500 Гц. Достоинством данного режима работы является его гибкость: при желании можно опрашивать не все мусорные контейнеры, а часть из них, или даже один мусорный контейнер, но с более высокой частотой.
В случае применения режима с общей синхронизацией аппаратура всех контролируемых мусорных контейнеров настроена на один общий код, по которому производится одновременный запуск программных устройств аппаратуры всех контролируемых мусорных контейнеров (фиг.10). Эти программно-временные устройства настроены таким образом, что подключение каждого абонента к линии радиосвязи производится в определенный момент времени после приема синхронизирующего кода, поэтому отрезки времени передачи абонентами информации в центральный пункт контроля разнесены между собой во времени. Достоинствами данного режима работы являются более короткий цикл передачи информации и более высокая помехоустойчивость. К недостаткам его следует отнести значительно меньшую гибкость: в данном случае невозможно изменять программу подключения абонентов с центрального пункта контроля.
Далее производится в ЭВМ 12 математическая экспресс-обработка в реальном времени всех параметров контролируемых мусорных контейнеров, и в случае отклонения их за допустимый предел у какого-либо контролируемого мусорного контейнера ЭВМ 12 выдаст сигнал тревоги с указанием номера контролируемого мусорного контейнера для принятия экстренных мер, например, в случае опорожнения контейнера при транспортировке в неразрешенном месте, а также при поиске похищенных контейнеров.
Таким образом, предлагаемая система по сравнению с прототипом обеспечивает определение местоположения контролируемых мусорных контейнеров и установление дуплексной радиосвязи между контролируемыми мусорными контейнерами и центральным пунктом контроля с использованием двух частот ω1, ω2 и сложных сигналов с фазовой манипуляцией.
Указанные сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность ФМн-сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто равномерно распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемников.
Сложные ФМн-сигналы открывают новые возможности в технике передачи дискретных сообщений и их защиты от несанкционированного доступа. Указанные сигналы позволяют применять перспективный вид селекции - структурную селекцию. Это значит, что появляется возможность выделять сложные ФМн-сигналы среди других сигналов и помех, действующих в одной и той же полосе частот и в одни и те же промежутки времени. Данная возможность реализуется сверткой спектра сложных ФМн-сигналов.
Тем самым функциональные возможности блока идентификации для мусорного контейнера расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА МУСОРНЫМИ КОНТЕЙНЕРАМИ | 2012 |
|
RU2490197C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2007 |
|
RU2360266C1 |
| СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С МНОГОСТОРОННЕЙ СВЯЗЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2755068C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2013 |
|
RU2529867C2 |
| СПОСОБ МАТЕРИАЛЬНО-ТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ С УПРАВЛЕНИЕМ МЕСТОПОЛОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2588339C2 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2017 |
|
RU2656972C1 |
| Способ контроля транспортных средств и устройство для его осуществления | 2020 |
|
RU2745459C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582502C2 |
Изобретение относится к области сбора и вывоза мусора. На каждом мусорном контейнере, оборудованном блоком идентификации, установлен измерительно-передающий блок, включающий сигнальные датчики, приемник GPS-сигналов, передатчик и приемник электромагнитного сигнала. Сигнальные датчики фиксируют переполнение контейнера, возгорание мусора, несанкционированный доступ и т.п. факторы. На пульт управления посредством радиосвязи поступает информация о состоянии контейнера и его местонахождении, определяемом с помощью системы GPS. Достигается дистанционный контроль условий эксплуатации контейнеров, а также мест их загрузки и опорожнения. 10 ил.
Система для дистанционного контроля за мусорными контейнерами, содержащими блок идентификации, имеющими корпус с фланцевым элементом жесткости или выступом и датчиком системы опознавания, взаимодействующей с бортовой системой идентификации автомобиля-мусоросборщика, расположенной на разгрузочном или засыпном устройстве, опорожняемыми с помощью разгрузочных или засыпных устройств в автомобиль-мусоросборщик с возможностью взвешивания на разгрузочном или засыпном устройстве до и после процесса опорожнения для определения веса содержащегося в контейнере мусора, при этом во фланцевом элементе жесткости или выступе корпуса выполнено гнездо для размещения в нем датчика опознавания с возможностью закрытия последнего со всех сторон, отличающаяся тем, что она снабжена располагаемым на каждом из группы одновременно контролируемых мусорных контейнеров измерительно-передающим блоком, включающим в себя сигнальные датчики, приемник GPS-сигналов, блок преобразования информации, блок управления, дуплексер, приемо-передающую антенну, передатчик и приемник электромагнитного сигнала, а также автономный источник питания, при этом для размещения измерительно-передающего блока использовано гнездо, выполненное во фланцевом элементе жесткости или выступе корпуса, выходы сигнальных датчиков и приемника GPS-сигналов соединены с выходами блока преобразования информации, к выходу которого последовательно подключены передатчик, дуплексер, вход-выход которого связан с приемо-передающей антенной, приемник и блок управления, подключенный к блоку преобразования информации, и центральным пунктом контроля, расположенным в зоне уверенного приема электромагнитных сигналов и состоящим из ЭВМ с устройствами ввода и отображения информации и последовательно подключенными к ее выходу передатчиком электромагнитного сигнала, дуплексером, вход-выход которого связан с приемо-передающей антенной, и приемником электромагнитного сигнала, выход которого подключен к ЭВМ, при этом каждый передатчик электромагнитного сигнала выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, первого смесителя, второй вход которого соединен с первым выходом первого гетеродина, усилителя первой промежуточной частоты и первого усилителя мощности, выход которого соединен с входом дуплексера, каждый приемник электромагнитного сигнала выполнен в виде последовательно подключенных к выходу дуплексера второго усилителя мощности, второго смесителя, второй вход которого соединен с первым выходом второго гетеродина, усилителя второй промежуточной частоты, перемножителя, второй вход которого соединен с вторым выходом первого гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с вторым выходом второго гетеродина, а выход является выходом приемника, причем второй вход фазового манипулятора центрального пункта контроля соединен с выходом ЭВМ, а второй вход фазового манипулятора каждого контролируемого мусорного контейнера соединен с выходом блока преобразования информации, передатчик центрального пункта контроля выполнен с возможностью излучения сложных сигналов с фазовой манипуляцией на частоте ωГ1=ωГ2, а приемник - с возможностью приема сигналов на частоте ω2=ωГ1, передатчик каждого контролируемого мусорного контейнера выполнен с возможностью излучения сложных сигналов с фазовой манипуляцией на частоте ω2, а приемник - с возможностью приема сигналов на частоте ω1, частоты ωГ1 и ωГ2 первого и второго гетеродинов разнесены на значение второй промежуточной частоты ωГ2-ωГ1=ωпр2.
| БЛОК ИДЕНТИФИКАЦИИ ДЛЯ МУСОРНОГО КОНТЕЙНЕРА | 1992 |
|
RU2040452C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| WO 2007136443 A3, 29.11.2007 | |||
| JP 2004231387 A, 19.08.2004 | |||
| JP 2005008339 A, 13.01.2005. | |||

