Изобретение относится к области радиолокации, в частности к области радиолокационных систем активного запроса-ответа (САЗО), и может быть использован для управления движением судов как надводных, так и воздушных при навигационных и швартовых операциях, а также в сложных гидрометеорологических условиях вплоть до полного отсутствия видимости.
Известны способы и устройства управления движением судов (авт. свид. СССР №№460535, 893672, 979204, 1150155, 1654143; патенты РФ №№2052838, 2075763, 2150142, 2155142, 2360266; патенты США №3927635; патент Великобритании №1068474; Коновалов В.В. и др. Судовые радионавигационные приборы. М.: Транспорт, 1981, с.156-170; Жерлаков А.В. и др. Радионавигационные системы предупреждения столкновения судов. Л.: Судостроение 1984, с.186-190 и др.).
Из известных способов и устройств наиболее близким к предлагаемому является «Способ управления движением судов» (патент РФ №2360266, G01S 13/75, 2007), который и выбран в качестве базового объекта.
Указанный способ обеспечивает повышение точности сопровождения судов пунктами управления движением и повышение эффективности управления судами в сложных навигационных и гидрометеорологических условиях. Это достигается за счет использования двух частот ω1, ω2, сложных сигналов с фазовой манипуляцией и корреляционной их обработкой, при этом определяются азимуты β1 и β2 на первую 1 и вторую 2 антенны управляемого судна (УС) 30 (Фиг.1) фазовым методом по формулам 

Фазовому методу пеленгации свойственно противоречие между требованиями к точности измерений и однозначности отсчета углов β1 и β2. Действительно, согласно приведенным формулам фазовая система тем чувствительнее к изменению углов β1 и β2, чем больше относительный размер базы d/λ. Но с ростом d/λ уменьшается значение угловых координат β1 и β2, при которых разности фаз и Δφ1 и Δφ2 превосходят значение 2π, т.е. наступает неоднозначность отсчета.
Исключить неоднозначность фазового метода пеленгации управляемого судна можно использованием двух шкал: фазовой шкалы, которая является точной, но неоднозначной, и временной шкалы, которая является грубой, но однозначной. В известном способе используются только фазовые шкалы, которые не обеспечивают однозначного отсчета азимутов β1 и β2 на первую 1 и вторую 2 антенны управляемого судна.
Технической задачей изобретения является расширение функциональных возможностей известного способа путем точного определения векторов скорости v1 и v2 первой и второй антенн управляемых судов при проведении сложных навигационных и швартовых операций. Поставленная задача решается тем, что способ управления движением судов, в котором в соответствии с ближайшим аналогом осуществляется радиолокационный обзор с использованием канала системы активного запроса-ответа с передачей части навигационно-пилотажной информации по этому каналу, принимают в ответчике запросный сигнал на две антенны, разнесенные вдоль оси судна на расстояние C, излучают ответный сигнал через первую антенну с задержкой А относительно момента обнаружения запросного сигнала в этой антенне, излучают ответный сигнал через вторую антенну с задержкой А+В относительно момента обнаружения запросного сигнала во второй антенне, уменьшают в запросчике значение дальности принятых ответных сигналов из второй антенны на величину B, выраженную в единицах дальности, и дают им признаки второй антенны, при этом на пункте управления движением формируют высокочастотное колебание на частоте ωс, манипулируют его по фазе модулирующим кодом M1(t), содержащим идентификационный номер управляемого судна и часть навигационно-пилотажной информации, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частот ωпр1=ωс+ωГ1, где ωГ1 - частота первого гетеродина, усиливают его по мощности и излучают в направлении управляемого судна на частоте ω1=ωпр1, принимаемый в ответчике сложный сигнал с фазовой манипуляцией в каждом приемнике преобразуют по частоте с использованием третьего гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ω1+ωГ1, где ωГ1 - частота третьего гетеродина, перемножают его с напряжением четвертого гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3, равной разности частот ωпр3=ωГ2+ωпр2, где ωГ2 - частота четвертого гетеродина, осуществляют синхронное детектирование сложного сигнала с фазовой манипуляцией на третьей промежуточной частоте ωпр3 с использованием напряжения третьего гетеродина в качестве опорного напряжения, выделяют аналог модулирующего кода M1(t), дешифрируют его, используя идентификационный номер управляемого судна и осуществляют обнаружение координатной части запросного сигнала, определение режима запроса, наличия и вида информационной части запросного сигнала, формируют высокочастотное колебание на частоте ωс и моделирующий ответный код M2(t), содержащий идентификационный номер управляемого судна, манипулируют им по фазе высокочастотное колебание на частоте ωс, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием четвертого гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3, равной разности частот ωпр3=ωГ2-ωс, где ωГ2 - частота четвертого гетеродина, усиливают его по мощности и излучают в эфир на частоте ω2=ωпр2 через первую антенну и с задержкой В через вторую антенну, принимают сложный сигнал с фазовой манипуляцией на пункте управления движением на две антенны, разнесенные в пространстве на расстояние d, усиливают его по мощности в первом и втором приемниках, преобразуют по частоте с использованием второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ωГ2+ω2, где ωГ2 - частота второго гетеродина, сравнивают их по фазе и последовательно определяют азимуты β1 и β2 на первую и вторую антенны управляемого судна соответственно, формируя фазовую шкалу пеленгации, точную, но неоднозначную, напряжение второй промежуточной частоты первого приемника перемножают с зондирующим сложным сигналом с фазовой манипуляцией на частоте ωс=ωпр2, который пропускают предварительно через первый блок регулируемой задержки, выделяют низкочастотное напряжение, пропорциональное первой корреляционной функции R1(τ), где τ - текущая временная задержка, поддерживают ее максимальное значение путем изменения времени задержки τ первого блока регулируемой задержки, по значениям которого последовательно определяют расстояния R1 и R2 до первой и второй антенны управляемого судна соответственно, при этом частоты ωГ1 и ωГ2 гетеродинов разносят на значение второй промежуточной частоты ωпр2=ωГ2-ωГ1, отличаются от ближайшего аналога тем, что напряжение второй промежуточной частоты первого приемника перемножают с напряжением второй промежуточной частоты второго приемника, которое пропускают предварительно через второй блок регулируемой задержки, выделяют низкочастотное напряжение, пропорциональное второй корреляционной функции R2(τ), поддерживают ее максимальное значение путем изменения времени задержки τ второго блока регулируемой задержки, по значениям которого последовательно определяют азимуты β1 и β2 на первую и вторую антенны управляемого судна соответственно, формируя временную шкалу пеленгации, грубую, но однозначную, напряжения второй промежуточной частоты первого и второго приемников умножают и делят по фазе на два, выделяют гармонические колебания на частотах ωс±Ωд1 и ωс±Ωд2, перемножают их с зондирующим гармоническим колебанием на частоте ωс, выделяют напряжения доплеровских частот ±Ωд1 и ±Ωд2, по величине и знаку доплеровских частот определяют величину и направление радиальных скоростей первой и второй антенны управляемого судна.
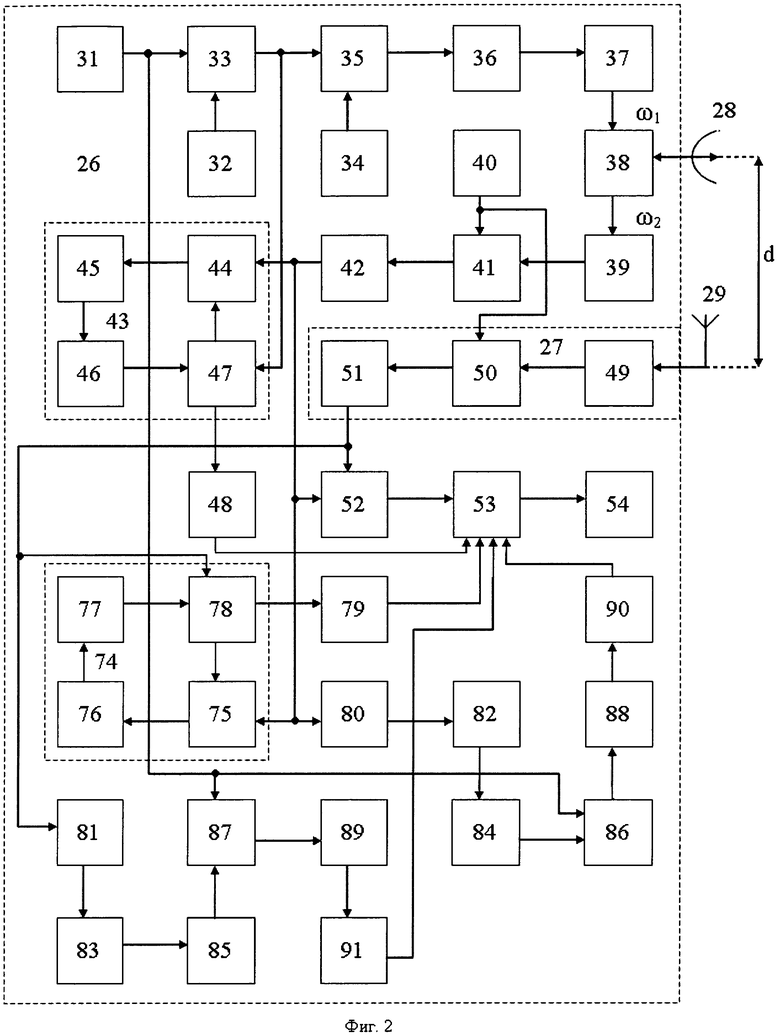
Взаимное расположение пункта управления движением и управляемого судна 30 схематически показано на фиг.1. Структурная схема пункта управления представлена на фиг.2. Частотная диаграмма, иллюстрирующая преобразование сигналов по частоте, показана на фиг.3. Структурная схема ответчика представлена на фиг.4 и 6. Функциональная схема блока обработки ответчика изображена на фиг.5.
Пункт управления содержит последовательно включенные первый задающий генератор 31, первый фазовый манипулятор 33, второй вход которого соединен с выходом генератора 32 псевдослучайной последовательности (ПСП), первый смеситель 35, второй вход которого соединен с выходом первого гетеродина 34, усилитель первой промежуточной частоты 36, первый усилитель мощности 37, первый дуплексер 38, вход-выход которого связан с третьей антенной 28, второй усилитель мощности 39, второй смеситель 41, второй вход которого соединен с выходом второго гетеродина 40, первый усилитель второй промежуточной частоты 42, первый перемножитель 44, второй вход которого через первый блок регулируемой задержки 47 соединен с выходом первого фазового манипулятора 33, первый фильтр нижних частот 45, первый экстремальный регулятор 46, первый блок регулируемой задержки 47, индикатор дальности 48, компьютер 53 и монитор 54, последовательно включенные четвертую антенну 29, третий усилитель мощности 49, третий смеситель 50, второй вход которого соединен с выходом второго гетеродина 40, второй усилитель второй промежуточной частоты 51 и фазометр 52, второй вход которого соединен с выходом первого усилителя второй промежуточной частоты 42, а выход подключен к компьютеру 53. Перемножитель 44, фильтр нижних частот 45, экстремальный регулятор 46 и блок 47 регулируемой задержки образуют первый коррелятор 43. Усилитель мощности 49, смеситель 50 и усилитель второй промежуточной частоты 51 образуют приемник 27. Все остальные блоки образуют приемопередатчик 26.
К выходу первого усилителя 42 второй промежуточной частоты последовательно подключены четвертый перемножитель 75, второй вход которого через второй блок регулируемой задержки 78 соединен с выходом второго усилителя второй промежуточной частоты 51, второй фильтр нижних частот 76, второй экстремальный регулятор 77, второй блок регулируемой задержки 78 и индикатор азимута 79, выход которого подключен к компьютеру 53. К выходу первого усилителя второй промежуточной частоты 42 последовательно подключены первый удвоитель фазы 80, первый делитель фазы на два 82, первый узкополосный фильтр 84, пятый перемножитель 86, второй вход которого соединен с выходом первого задающего генератора 31, второй узкополосный фильтр 88 и первый измеритель доплеровской частоты 90, выход которого подключен к компьютеру 53. К выходу второго усилителя второй промежуточной частоты 51 последовательно подключены второй удвоитель фазы 81, второй делитель фазы на два 83, третий узкополосный фильтр 85, шестой перемножитель 87, второй вход которого соединен с выходом первого задающего генератора 31, четвертый узкополосный фильтр 89 и второй измеритель доплеровской частоты 91, вход которого подключен к компьютеру 53.
Четвертый перемножитель 75, второй фильтр нижних частот 76, второй экстремальный регулятор 77 и второй блок регулируемой задержки 78 образуют второй коррелятор 74.
Ответчик содержит последовательно включенные первую антенну 1, первый дуплексер 3, четвертый усилитель мощности 55, четвертый смеситель 58, второй вход которого соединен с выходом третьего гетеродина 57, третий усилитель второй промежуточной частоты 60, второй перемножитель 62, второй вход которого соединен с выходом четвертого гетеродина 70, первый полосовой фильтр 64, первый фазовый детектор 66, второй вход которого соединен с выходом третьего гетеродина 57, первый дешифратор 7, блок обработки 9, шифратор 10, второй фазовый манипулятор 69, второй вход которого соединен с выходом второго задающего генератора 68, шестой смеситель 71, второй вход которого соединен с выходом четвертого гетеродина 70, усилитель третьей промежуточной частоты 72, шестой усилитель мощности 73, коммутатор 12, второй дуплексер 4, вход-выход которого связан со второй антенной 2, пятый усилитель мощности 56, пятый смеситель 59, второй вход которого соединен с выходом третьего гетеродина 57, четвертый усилитель второй промежуточной частоты 61, третий перемножитель 63, второй вход которого соединен с выходом четвертого гетеродина 70, второй полосовой фильтр 65, второй фазовый детектор 67, второй вход которого соединен с выходом третьего гетеродина 57, и дешифратор 8, выходы которого подключены к блоку обработки 9. Усилитель мощности 55 (56), смеситель 58 (59), гетеродин 57, усилитель второй промежуточной частоты 60 (61), перемножитель 62 (63), полосовой фильтр 64 (65) и фазовый детектор 66 (67) образуют первый (второй) приемник 5 (6).
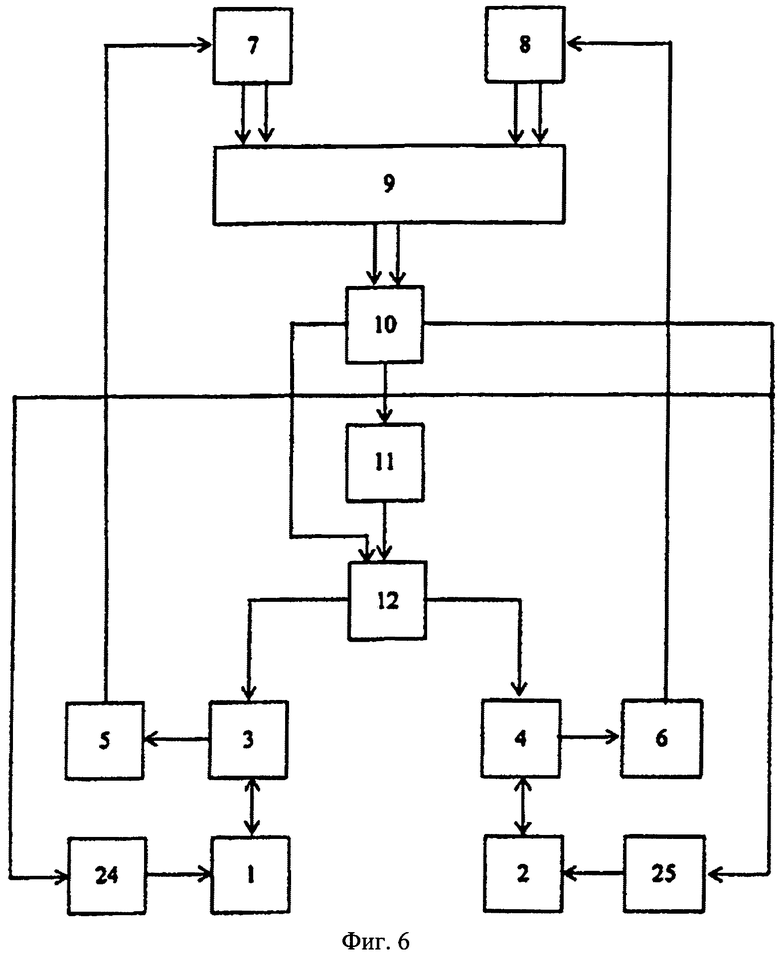
На фиг.5 изображена функциональная схема блока обработки ответчика, в котором измеряется разность прихода запросных сигналов на первую 1 и вторую 2 антенны во временном окне, равном 2С, выраженном во времени, для частного случая, когда n=3, где 13 и 14 первый и второй переключатели соответственно, 15 - счетчик времени, 16 и 17 - первая и вторая группы из n последовательно соединенных регистров соответственно, 18 и 22 - первая и вторая группы из n устройств совпадений соответственно, 19 - многоразрядные переключатели, 20 - матрица из n×n сумматоров, 21 и 23 - первый и второй блоки задержки соответственно. На фиг.6 изображена функциональная схема ответчика, обеспечивающего направленное излучение ответных сигналов, где цифрами 1-12 обозначены те же элементы, что и на фиг.4, а 24 и 25 - первый и второй блоки формирования и управления ДН соответственно. Следует отметить, что частоты первого 34 и третьего 57 гетеродинов выбираются равными ωГ1, а частоты второго 40 и четвертого 70 гетеродинов выбираются равными ωГ2.
Предлагаемый способ реализуется следующим образом.
На пункте контроля задающим генератором 31 формируется гармоническое колебание
Uc1(t)=vc1·cos(ωct+φc1), 0≤t≤Тс1,
где vc1, ωc1, φc1, Tc1 - амплитуда, несущая частота, начальная фаза и длительность гармонического колебания, которое поступает на первый вход фазового манипулятора 33, на второй вход которого подается модулирующий код M1(t) с выхода генератора 32 псевдослучайной последовательности (ПСП). Модулирующий код M1(t) содержит идентификационный номер управляемого судна 30 и часть навигационно-пилотажной информации. На выходе фазового манипулятора 33 образуется сложный сигнал с фазовой манипуляцией (ФМн)
U1(t)=vc1·cos[ωct+φk1(t)+φc1], 0≤t≤Тс1,
где φk1(t)={0, π} - манипулированная составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t), причем φk1(t)=const при k·τэ<t<(k+1)·τэ и может изменяться скачком при t=k·τэ т.е. на границах между элементарными посылками (к=1, 2, …, N1-1);
τэ, N1 - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс1(Тс1=τэN1),
который поступает на первый вход смесителя 35, на второй вход которого подается напряжение гетеродина 34
UГ1(t)=vГ1·cos(ωГ1t+φГ1).
На выходе смесителя 35 образуются напряжения комбинационных частот. Усилителем 36 выделяется напряжение первой промежуточной (суммарной) частоты Uпр1(t)=vпр1·cos[ωпр1t+φk1(t)+φпр1], 0≤t≤Тс1,
где vпр1=1/2·vc1·vГ1;
ωпр1=ωс+ωГ1 - первая промежуточная (суммарная) частота;
φпр1=φc1·φГ.
Это напряжение после усиления в усилителе 37 мощности через дуплексер 38 поступает в антенну 28 с узкой диаграммой направленности и излучается ею в направление управляемого судна 30 на частоте ω1=ωпр1. Указанный сигнал принимается антеннами 1 и 2 управляемого судна 30 и через дуплексеры 3 и 4, усилители 55 и 56 мощности поступает на первый вход смесителей 58 и 59. На второй вход смесителей 58 и 59 подается напряжение UГ1(t) гетеродина 57. На выходе смесителя 58 (59) образуются напряжения комбинационных частот. Усилителем 60 (61) выделяется напряжение второй промежуточной (разностной) частоты
Uпp2(t)=vпp2cos[ωпp2t+φк1(t)+φпр2],
где vпp2=1/2·vпр1vГ1;
ωпр2=ω1-ωГ1 - вторая промежуточная (разностная) частота (фиг.3);
φпр2=φпр1·φГ1,
которое поступает на первый вход перемножителя 62 (63). На второй вход перемножителя 62 (63) подается напряжение гетеродина 70 UГ2(t)=vГ2cos(ωГ2t+φГ2).
На выходе перемножителя 62 (63) образуется напряжение
U2(t)=v2·cos[ωГ1t-φk1(t)+φГ1], 0≤t≤Тс1,
где v2=1/2·vпр2·vГ2,
которое выделяется полосовым фильтром 64 (65) и поступает на первый вход фазового детектора 66 (67), на второй (опорный) вход которого подается напряжение UГ1(t) гетеродина 57. На выходе фазового детектора 66 (67) образуется низкочастотное напряжение
Uн1(t)=vн1cosφк1(t), 0≤t≤Tc1,
где vн1=1/2·v2·vГ1,
пропорциональное модулирующему коду M1(t).
Эти напряжения с выходов приемников 5, 6 (фазовых детекторов 66, 67) поступают на входы дешифраторов 7, 8 соответственно, где осуществляется обнаружение координатной части запросного сигнала, определение режима запроса, наличия и вида информационной части запросного сигнала.
По сигналу обнаружения координатной части запросного сигнала в первом дешифраторе 7, поступающему с выхода дешифратора, в блоке 9 обработки фиксируется текущее время и через интервал времени A выдается сигнал в дешифратор 10, содержащий информацию о виде режима запроса и информационной части запросного сигнала. На основании этой информации в шифраторе 10 производится формирование кода M2(t) ответного сигнала, которое содержит идентификационный номер управляемого судна 30.
Задающим генератором 68 формируется гармоническое колебание Uc2(t)=vc2cos(ωct+φс2), 0≤t≤Тс2,
которое поступает на первый вход фазового манипулятора 69, на второй вход которого подается модулирующий код M2(t) с выхода шифратора 10. На выходе фазового манипулятора 69 формируется сложный сигнал с фазовой манипуляцией (ФМн) U3(t)=vc2cos[ωct+φк2(t)+φс2], 0≤t≤Тс2,
который поступает на первый вход смесителя 71, на второй вход которого подается напряжение UГ2(t) гетеродина 70. На выходе смесителя 71 образуются напряжения комбинационных частот. Усилителем 72 выделяется напряжение третьей промежуточной (разностной) частоты
Uпp3(t)=vпp3cos[ωпp3t+φк2(t)+φс2], 0≤t≤Тс2,
где vпр3=1/2·vc2·vГ2.
Это напряжение после усиления в усилителе 73 мощности через коммутатор 12 и дуплексер 3 поступает в антенну 1 и излучается на частоте ω2=ωпр3 в пространство, определяемое ее диаграммой направленности (ДН). Одновременно со второго выхода шифратора 10 на управляющий вход коммутатора 12 поступает сигнал, переключающий выход коммутатора 12 на вход первого циркулятора 3.
Сложный ФМн-сигнал Uпр3(t) на частоте ω2 принимается антеннами 28 и 29 пункта управления:
U4(t)=U4cos[(ω2±Ωд1)·(t-τз1)-φк2(t-τз1)+φ1];
U5(t)=U5cos[(ω2±Ωд2)·(t-τз2)-φк2(t-τз2)+φ2], 0≤t≤Тс2,
где ±Ωд1, ±Ωд2 - доплеровские смещение частоты сигналов, принимаемыми антеннами 28 и 29 соответственно;

R1 - расстояние между первой антенной 1 и третьей антенной 28;
R3 - расстояние между первой антенной 1 и четвертой антенной 29;
С - скорость распространения радиоволн, которые через дуплексер 38 и усилители 39 и 49 мощности соответственно поступают на первые входы смесителей 41 и 50, на вторые входы которых подается напряжение UГ2(t) гетеродина 40. На выходе смесителей 41 и 50 образуются напряжения комбинационных частот. Усилителями 42 и 51 выделяются напряжения второй промежуточной (разностной) частоты:
Uпр4(t)=Uпр4cos[(ω2±Ωд1)·(t-τз1)-φк2(t-τз1)+φпр4];
Uпр5(t)=Uпр5cos[(ω2±Ωд2)·(t-τз2)-φк2(t-τз2)+φпр5], 0≤t≤Тс2,
где 

φпр2=φГ2-ω2 - вторая промежуточная (разностная) частота;
φпр4=φГ2-φ1;
φпр5=φГ2-φ2.
Напряжение Uпр4(t) с выхода усилителя 42 второй промежуточной частоты поступает на первый вход перемножителя 44, на второй вход которого через блок 47 регулируемой задержки подается зондирующий сигнал U1(t) с выхода фазового манипулятора 33. Фильтром 45 нижних частот выделяется напряжение, пропорциональное первой корреляционной функции R1(τ). Экстремальный регулятор 47 изменяет время задержки τ блока 47 временной задержки таким образом, чтобы поддерживалась максимальной первая корреляционная функция R1(τ). При этом индикатор 48 дальности функции расстояние R1 между первой антенной 1 и третьей антенной 28

которое поступает в компьютер 53. Напряжение Uпр4(t) и Uпр5(t) с выходов усилителей 42 и 51 второй промежуточной частоты поступают на два входа фазометра 52, который определяет следующую разность фаз:

где d - измерительная база (расстояние между антеннами 28 и 29);
λ - длина волны;
β1 - азимут первой антенны 1.
Так формируется фазовая шкала пеленгации первой антенны 1 управляемого судна 30. Она является точной, но неоднозначной.
Измеренная разность фаз Δφ1 поступает в компьютер 53. Измеренные значения R1 и Δφ1 могут визуально наблюдаться на экране монитора 54.
Напряжение Uпр4(t) с выхода усилителя 42 второй промежуточной частоты одновременно поступает на первый вход четвертого перемножителя 75, на второй вход которого через второй блок 78 регулируемой задержки подается напряжение Uпр5(t) с выхода усилителя 51 второй промежуточной частоты, вторым фильтром 76 нижних частот выделяется низкочастотное напряжение, пропорциональное второй корреляционной функции R2(τ). Второй экстремальный регулятор 77 изменяет время задержки τ второго блока 78 временной задержки таким образом, чтобы поддерживалась максимальной вторая корреляционная функция R2(τ). При этом индикатор 79 фиксирует азимут β1 первой антенны 1 управляемого судна 30

где τ1=τз1-τз2, который поступает в компьютер 53.
Так формируется временная шкала пеленгации первой антенны 1 управляемого судна 30. Она является грубой, но однозначной.
Напряжения Uпр4(t) и Uпр5(t) с выходов усилителей 42 и 51 второй промежуточной частоты одновременно поступают на входы удвоителей 80 и 81 фазы соответственно. В качестве последних могут быть использованы перемножители, на два входа которых подается одно и то же напряжение.
На выходах удвоителей 80 и 81 фазы образуются гармонические колебания:
U6(t)=U6cos[2(ωпр2±Ωд1)·(t-τз1)+2φпр4];
U7(t)=U7cos[2(ωпр2±Ωд2)·(t-τз2)+2φпр5], 0≤t≤Тс2,
где 

в которых фазовая манипуляция уже отсутствует, так как 2φк(t-τз1)={0.2π}, 2φk2(t-τз2)={0.2π}.
Ширина спектра Δfc сложного ФМн-сигнала определяется длительностью τэ его элементарных посылок
Тогда как ширина спектра Δf2 его второй гармоники определяется длительностью сигнала Тс2:

Следовательно, при удвоении фазы сложного ФМн-сигнала его спектр сворачивается в N раз:
Δfc/Δf2=N,
где N - длительность элементарных посылок.
Гармонические колебания U6(t) и U7(t) поступают на входы делителей 82 и 83 фазы на два соответственно, на выходе которых образуются гармонические колебания:
U8(t)=U8cos[(ωпр2±Ωд1)·(t-τз1)+φпр4];
U9(t)=U9cos[(ωпр2±Ωд2)·(t-τз2)+φпр5],
которые выделяются узкополосными фильтрами 84 и 85 и поступают на первые входы перемножителей 86 и 87. На вторые входы последних подается гармоническое колебание Uc1(t) с выхода задающего генератора 31. На выходе перемножителей 86 и 87 образуются напряжения комбинационных частот. Узкополосными фильтрами 88 и 89 выделяются напряжения доплеровской частоты:
U10(t)=U10cos[±Ωд1(t-τз1)+φ10];
U11(t)=U11cos[±Ωд2(t-τз2)+φ11]; 0≤t≤Tc2,
где 
U10=φc1-φпр4;
U11=φc1-φпр5,
которые поступают на входы измерителей 90 и 91 доплеровской частоты, которые обеспечивают измерение доплеровских частот ±Ωд1 и ±Ωд2. Причем величина и знак доплеровских частот определяют величину и направление радиальной скорости первой антенны 1.
Аналогично по сигналу обнаружения координатной части запросного сигнала во втором дешифраторе 8 в блоке 9 обработки фиксируется текущее время и через интервал А+В выдается сигнал в шифратор 10, где производится формирование кода ответного сигнала, аналогичного предыдущему либо отличающегося от него, например, за счет наличия признака второй антенны. На основании этой информации в шифраторе 10 производится формирование кода ответного сигнала для второй антенны, в соответствии с которым в передатчике 11 формируется сложный ФМн-сигнал. Одновременно со второго выхода шифратора 10 на управляющий вход коммутатора 12 поступает сигнал, переключающий выход коммутатора 12 на вход второго циркулятора 4.
Таким образом, этот сигнал с выхода передатчика 11 поступает во вторую антенну 2 и излучается в пространство, определяемое ее ДН.
Для исключения взаимовлияния сигналов, излучаемых первой 1 и второй 2 антеннами ответчика, целесообразно установить величину А, большей или равной максимально возможному в данной САЗО значению расстояния между антеннами ответчика С, выраженному во времени tcм, а величину В, - большей или равной Д+tсм, где Д - максимальная длительность ответного сигнала. В этом случае ответный сигнал из второй антенны на один и тот же запрос будет приниматься запросчиком после окончания приема сигнала из первой независимо от ракурса и размера судна.
Аналогично определяются R2, β2, ±Ωд3 и Ωд4.
В запросчике фиксируется время приема первого ответного сигнала относительно ответного сигнала, следующего за первым с задержкой в пределах от A до (А+В), и из этого времени вычитают значение В. Полученные величины определяют дальности первой и второй антенн ответчика соответственно R3 и R4.
Ответный сигнал, принимаемый с задержкой, большей, чем A+B, относительно первого, классифицируется как первый ответный сигнал ответчика другого судна, хотя это может быть и второй ответный сигнал другого судна, если оно близко расположено к первому. В последнем случае первый ответный сигнал второго судна оказался заблокированным ответным сигналом первого судна и, следовательно, на выходе приемника запросчика не будет пары ответных сигналов, удовлетворяющих вышеприведенному требованию по задержке, и этот сигнал не получит признака номера антенны.
Измеренные дальности R1, R2 и азимуты β1, β2 первый 1 и второй 2 антенн ответчика определяют направление оси контролируемого судна 30.
Измеренные значения R1, R2, β1, β2 используются для расчета в компьютере 53 координат антенн 1 и 2 ответчика в прямоугольной системе координат:
X1=R1·sinβ1;
Y1=R1·cosβ1;
X2=R2·sinβ2;
Y2=R2·cosβ2;
и определения курса управляемого судна по формулам

где 
в режиме работы САЗО без передачи информации о значении C и 
в режиме работы САЗО с передачей информации о С.
В компьютере 53 измеряются угловые скорости первой 1 и второй 2 антенн управляемого судна 30. Указанные измерения основаны на сравнении доплеровских частот смещений.
По найденным значениям угловых скоростей можно определить тангенциальные составляющие и модуль вектора скорости первой 1 и второй 2 антенн:




С целью дальнейшего повышения точности измерения координат и курсов судов, измеряют в ответчике разности времен прихода запросных сигналов в первую 1 и вторую 2 антенны во временном окне, равном или большем 2С, выраженном во времени, относительно каждого запросного сигнала, обнаруженного в первой антенне, и передают в ответном сигнале значения полученных разностей прихода запросных сигналов в первую и вторую антенны ΔR, а также значение С, выраженное во времени, или пеленги на запросчики, для чего в ответчике блок 9 обработки содержит первый 13 и второй 14 переключатели, счетчик 15 времени, первую 16 и вторую 17 группы из n последовательно соединенных регистров соответственно, первую 18 и вторую 22 группы из n устройств совпадения соответственно, многоразрядные переключатели 19, матрицу 20 из nхn сумматоров, первый 21 и второй 23 блоки задержки соответственно.
На сигнальные входы переключателей 13, 14 поступает сигнал текущего времени с первого выхода счетчика 15 времени. В момент обнаружения координатной части запросного сигнала текущее значение времени фиксируется в первых регистрах первой 16 и второй 17 групп многоразрядных регистров с параллельной записью информации соответственно, одновременно в этих регистрах фиксируются сигналы, содержащие информационную часть запросного сигнала, поступающие на вторые входы первых регистров первой и второй групп соответственно, являющиеся вторым и четвертым входами блока обработки соответственно.
При поступлении нового сигнала на вход первого регистра первый 16 или второй 17 групп его содержимое переписывается во второй регистр и так далее. При поступлении нового сигнала в последний n-й регистр данной группы содержащаяся в нем ранее информация стирается.
Сигнал текущего времени, уменьшенного на величину tc, (t-tc), где tc - выраженное во времени значение С, со второго выхода счетчика 15 времени поступает на первые входы всех устройств совпадений (УС) первой группы 18, где сравнивается с сигналами текущего времени, записанными в регистрах первой группы, поступающими на вторые входы соответствующих УС. В момент совпадения (t-tc) с содержащимся в i-ом регистре значением текущего времени ti содержимое i-го регистра первой группы поступает через УС в i-ый многоразрядный переключатель 19, который выдает на выход сигналы разности i-го столбца матрицы 20 сумматоров nхn - разности времен прихода всех запросных сигналов, поступивших во вторую антенну во временном интервале (t1-tc)-(ti+tc) относительно сигнала, записанного в i-ом регистре первой группы, пришедшего в первую антенну в момент времени ti.
Таким образом, содержимое i-го регистра первой группы и значения разностей времен прихода запросных сигналов во вторую антенну относительно ti передаются через первый блок 21 задержки, дополняющий задержку относительно момента обнаружения запросного сигнала в первой антенне до величины A, и поступает на первый вход шифратора 10 для дальнейшего формирования ответного сигнала, излучаемого через первую антенну.
Сигнал текущего времени, уменьшенного на величину 2tc, (ti-2tc) с третьего выхода счетчика 15 времени, поступает на первые входы всех устройств совпадений второй группы 22, где сравнивается с сигналами текущего времени, записанными в регистрах второй группы 17, поступающими на вторые входы соответствующих УС. В момент совпадения (ti-2tc) с содержащимся в j-ом регистре значением текущего времени tj содержимое j-го регистра поступает через i-ый УС и второй блок 23 задержки, дополняющий задержку относительно момента обнаружения запросного сигнала во второй антенне до величины A+B, на второй вход шифратора 10 для дальнейшего формирования ответного сигнала, излучаемого через вторую антенну.
Таким образом, ответный сигнал из второй антенны передается на самый первый запросный сигнал, пришедший в эту антенну в интервал времени (ti-tc)-(ti+tc). В момент совпадения значений времени в УС как первый, так и второй групп из них выдается на третий вход соответствующего регистра сигнал стирания его содержимого.
Следует отметить, что в ответном сигнале передаются разности времен прихода запросных сигналов во вторую антенну относительно одного запросного сигнала из числа записанных в регистры первой группы, а другие могут быть не переданными вследствие бланкирования ответом на более ранний запрос.
Если во вторую антенну ответчика первым пришел запросный сигнал другого запросчика во временном интервале (ti-tc)-(ti+tc) относительно времени прихода запросного сигнала от данного запросчика в первую антенну, то задержка ответного сигнала из второй антенны не будет соответствовать истинной задержке. Выбор истинной задержки из числа значений, содержащихся в ответном сигнале, осуществляется путем использования информации о С, содержащейся в том же ответном сигнале, и измеренных в запросчике значениях β1 и β2.
Очевидно, что указанные выше операции упрощаются, если в запросном сигнале передается признак запросчика, установленный постоянно для каждого запросчика. В этом случае исключается передача в ответном сигнале ложных разностей времен прихода. На фиг.6 изображена функциональная схема ответчика, обеспечивающего направленное излучение ответных сигналов, где цифрами 1-12 обозначены те же элементы, что и на фиг.4, а 24 и 25 - первый и второй блоки формирования и управления ДН соответственно.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает определение векторов скорости v1 и v2 первой и второй антенн управляемого судна в сложных метеоусловиях. Это достигается измерением доплеровских скоростей и использованием временной шкалы пеленгации, которая является грубой, но однозначной шкалой пеленгации. При этом между запросчиком и ответчиком устанавливается дуплексная радиосвязь на двух частотах ω1 и ω2 с использованием сложных сигналов с фазовой манипуляцией и корреляционной обработкой.
Использование двух частот ω1 и ω2 обеспечивает частотную развязку между передатчиками и приемниками.
Корреляционная функция сложных ФМн-сигналов обладает следующим свойством: она имеет относительно высокий основной лепесток и низкий уровень боковых лепестков, что позволяется с высокой точностью измерять расстояние R1, R2, R3, R4 между антеннами 28 и 29 запросчика и первой 1 и второй 2 антеннами ответчика соответственно, а также азимуты β1 и β2 на первую 1 и вторую 2 антенны управляемого судна.
Для измерения азимутов β1 и β2 используется фазовая шкала пеленгации, точная, но неоднозначная, и временная шкала пеленгации, грубая, но однозначная.
Сложные ФМн-сигналы обладают высокой помехоустойчивостью, энергетической и структурной скрытностью. Они позволяют применять эффективный вид селекции - структурную селекцию.
Тем самым функциональные возможности известного способа существенно расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2007 |
|
RU2360266C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389040C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ | 2009 |
|
RU2429503C2 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309431C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И МЕСТОПОЛОЖЕНИЯ СПУТНИКА ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ГЛОНАСС И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518174C2 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2009 |
|
RU2385246C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278047C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278048C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |



Предлагаемый способ относится к области радиолокации, в частности к области радиолокационных систем активного запроса-ответа (САЗО), и может быть использован для управления движением судов как надводных, так и воздушных в сложных метеоусловиях вплоть до полного отсутствия видимости. Достигаемый технический результат - расширение функциональных возможностей известного способа путем точного определения векторов скорости v1 и v2 первой и второй антенн управляемого судна в сложных метеоусловиях. Система, реализующая предлагаемый способ, содержит пункт управления движением и ответчик, установленный на управляемом судне, и выполненные определенным образом. 6 ил.
Способ управления движением судов, в котором осуществляют радиолокационный обзор с использованием канала системы активного запроса-ответа с передачей части навигационно-пилотажной информации по этому каналу, принимают в ответчике запросный сигнал на две антенны, разнесенные вдоль оси судна на расстояние C, излучают ответный сигнал через первую антенну с задержкой A относительно момента обнаружения запросного сигнала в этой антенне, излучают ответный сигнал через вторую антенну с задержкой A+В относительно момента обнаружения запросного сигнала во второй антенне, уменьшают в запросчике значение дальности принятых ответных сигналов из второй антенны на величину В, выраженную в единицах дальности, и дают им признаки второй антенны, при этом на пункте управления движением формируют высокочастотное колебание на частоте ωс, манипулируют его по фазе модулирующим кодом M1(t), содержащим идентификационный номер управляемого судна и часть навигационно-пилотажной информации, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1, равной сумме частот ωпр1=ωc+ωГ1, где ωГ1 - частота первого гетеродина, усиливают его по мощности и излучают в направлении управляемого судна на частоте ω1=ωпр1, принимаемый в ответчике сложный сигнал с фазовой манипуляцией в каждом приемнике преобразуют по частоте с использованием третьего гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ω1-ωГ1, где ωГ1 - частота третьего гетеродина, перемножают его с напряжением четвертого гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3, равной разности частот ωпр3=ωГ2-ωпр2, где ωГ2 - частота четвертого гетеродина, осуществляют синхронное детектирование сложного сигнала с фазовой манипуляцией на третьей промежуточной частоте ωпр3 с использованием напряжения третьего гетеродина в качестве опорного напряжения, выделяют аналог модулирующего кода M1(t), дешифрируют его, используя идентификационный номер управляемого судна, и осуществляют обнаружение координатной части запросного сигнала, определение режима запроса, наличия и вида информационной части запросного сигнала, формируют высокочастотное колебание на частоте ωс и модулирующий ответный код М2(t), содержащий идентификационный номер управляемого судна, манипулируют им по фазе высокочастотное колебание на частоте ωс, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием четвертого гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3, равной разности частот ωпр3=ωГ2-ωс, где ωГ2 - частота четвертого гетеродина, усиливают его по мощности и излучают в эфир на частоте ω2=ωпр3 через первую антенну и с задержкой В через вторую антенну, принимают сложный сигнал с фазовой манипуляцией на пункте управления движением на две антенны, разнесенные в пространстве на расстояние d, усиливают его по мощности в первом и втором приемниках, преобразуют по частоте с использованием второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2, равной разности частот ωпр2=ωГ2-ω2, где ωГ2 - частота второго гетеродина, сравнивают их по фазе и последовательно определяют азимуты β1 и β2 на первую и вторую антенны управляемого судна соответственно, формируя фазовую шкалу пеленгации, точную, но неоднозначную, напряжение второй промежуточной частоты первого приемника перемножают с зондирующим сложным сигналом с фазовой манипуляцией на частоте ωс=ω2, который пропускают предварительно через первый блок регулируемой задержки, выделяют низкочастотное напряжение, пропорциональное первой корреляционной функции R1(τ), где τ - текущая временная задержка, поддерживают ее максимальное значение путем изменения времени задержки τ первого блока регулируемой задержки, по значениям которого последовательно определяют расстояние R1 и R2 до первой и второй антенн управляемого судна соответственно, при этом частоты ωГ1 и ωГ2 гетеродинов разносят на значение второй промежуточной частоты ωпр2=ωГ2-ωГ1, отличающийся тем, что напряжение второй промежуточной частоты первого приемника перемножают с напряжением второй промежуточной частоты второго приемника, которое пропускают предварительно через второй блок регулируемой задержки, выделяют низкочастотное напряжение, пропорциональное второй корреляционной функции R2(τ), поддерживают ее максимальное значение путем изменения времени задержки τ второго блока регулируемой задержки, по значениям которого последовательно определяют азимуты β1 и β2 на первую и вторую антенны управляемого судна соответственно, формируя временную шкалу пеленгации, грубую, но однозначную, напряжение второй промежуточной частоты первого и второго приемника умножают и делят по фазе на два, выделяют гармонические колебания на частотах ωс±Ωд1 и ωс±Ωд2, перемножают их с зондирующим гармоническим колебанием на частоте ωс, выделяют напряжения доплеровских частот ±Ωд1 и ±Ωд2, по величине и знаку доплеровских частот определяют величину и направление радиальных скоростей первой и второй антенн управляемого судна.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2007 |
|
RU2360266C1 |
| RU2008124881 A, 27.12.2009 | |||
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389040C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ | 2009 |
|
RU2429503C2 |
| WO 2010008692 A1, 21.01.2010 | |||
| WO 2012136641 A1, 11.10.2012 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЕТАЛИ ИЗ ЗАГОТОВКИ ПОСРЕДСТВОМ ФРЕЗЕРНОГО ИНСТРУМЕНТА | 2009 |
|
RU2465103C2 |
| US 5826819 A, 27.10.1998 | |||

