Предлагаемые технические решения относятся к базирующейся на глобальной системе местоопределения системе управления материально-техническим обеспечением с использованием подвижных объектов, в качестве которых могут быть космические, воздушные, водные и наземные транспортные средства.
Область управления материально-техническим обеспечением относительно объемна и включает в себя широкий спектр систем слежения за операциями материально-технического обеспечения различными видами материалов, управления ими и информирования о них. Важными видами материально-технического обеспечения являются, например, погрузочно-разгрузочные операции, осуществляемые в области транспортировки.
Первостепенной задачей многих систем управления материально-техническим обеспечением является их автоматизация. В результате широкого применения аппаратных и программных средств ЭВМ в области материально-технического обеспечения была достигнута относительно высокая степень его автоматизации. Так существуют компьютеризованные системы управления погрузочно-разгрузочными операциями.
Современным достижением в области управления перемещением транспортных средств стала глобальная система местоопределения. Системы управления перемещением транспортных средств на базе глобальной системы местоопределения широко используются, в частности, в области коммерческих перевозок. Известные из техники на данный момент системы дают информацию о местоположении с относительно высокой степенью точности.
С помощью существующего на сегодняшний день промышленно производимого оборудования координаты глобального местоположения могут быть получены с точностью до нескольких сантиметров.
Известны способы и системы материально-технического обеспечения транспортных средств (авт. свид. СССР №№930.254, 1.233.105, 1.276.594, 1.722.999, 1.780.080; патенты РФ №№2.094.853, 2.113.012, 2.122.239, 2.172.524, 2.258.909, 2.435.228; патенты США №№5.390.125, 5.574.648; патент Франции №2.438.877; патенты Японии №№08-030.829, 09-204.599 и другие).
Из известных способов и систем наиболее близкими к предлагаемым являются система и способ материально-технического обеспечения с управлением местоположением (патент РФ №2.258.909, G01C 21/00, 2000), которые и выбраны в качестве базовых объектов.
Указанные технические решения относятся к области эксплуатации саморазгружающихся грузовых вагонов. В системе и способе используется установленное на транспортном средстве (ТС) устройство контроля местоположения ТС при осуществлении операций материально-технического обеспечения, таких как погрузка материала в ТС и разгрузка материалов из него. Средство контроля местоположения ТС может базироваться на глобальной системе позиционирования, при этом контролируется линейное перемещение ТС, в частности перемещение железнодорожного вагона по железнодорожному полотну. Входящее в состав данного средства контроля электронно-вычислительное устройство соединено с установленными на ТС компонентами, служащими для осуществления функции материально-технического обеспечения и управления ими.
В известных технических решениях операции материально-технического обеспечения выполняются автоматически по запрограммированным в бортовой ЭВМ командам, что снижает их эффективность и ограничивает функциональные возможности. В ряде случаев операции материально-технического обеспечения требуют определенной корректировки в связи с возникшими обстоятельствами, также необходим постоянный контроль за работой бортовых систем ТС и возможность управления ими.
Технической задачей изобретения является расширение функциональных возможностей и повышение эффективности материально-технического обеспечения транспортного средства путем установления дуплексной радиосвязи между транспортным средством и пунктом контроля с использованием двух частот и сложных сигналов с фазовой манипуляцией.
Поставленная задача решается тем, что способ материально-технического обеспечения с управлением местоположением транспортного средства, в ходе осуществления которого на транспортном средстве устанавливают приемное устройство глобальной системы позиционирования, загружают сыпучий материал в транспортное средство, программируют бортовой микропроцессор командами о разгрузке материала и координатами местоположения в глобальной системе позиционирования, в которой должна произойти названная операция разгрузки, принимают сигналы глобальной системы позиционирования при помощи приемного устройства, сравнивают координаты местоположения в глобальной системе позиционирования, принятые приемным устройством, с координатами в глобальной системе позиционирования, соответствующими положению, в котором должна произойти названная операция разгрузки, и выгружают названный материал из транспортного средства, отличается от ближайшего аналога тем, что между транспортным средством и диспетчерским пунктом контроля, координаты которого определяют в результате прецизионной геодезической съемки, устанавливают дуплексную радиосвязь с использованием двух частот ω1, ω2 и сложных сигналов с фазовой манипуляцией, на транспортном средстве и диспетчерском пункте контроля формируют высокочастотное колебание на частоте ωc, манипулируют его по фазе модулирующим кодом, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωГ1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1=ωc+ωГ1, усиливают его по мощности, излучают в эфир, принимают на другом объекте, усиливают по мощности, преобразуют по частоте с использованием частоты ωГ1 второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2=ωпр1-ωГ1=ωс, перемножают с напряжением второго гетеродина с частотой ωГ1, выделяют сложный сигнал с фазовой манипуляцией на частоте ωГ2 первого гетеродина, осуществляют его синхронное детектирование с использованием напряжения первого гетеродина с частотой ωГ2 в качестве опорного напряжения, выделяют низкочастотное напряжение, пропорциональное модулирующему коду, регистрируют и анализируют его, при этом на транспортном средстве сложные сигналы с фазовой манипуляцией излучают на частоте ω1=ωпр1=ωГ2, а принимают на частоте ω2=ωпр3=ωГ1, где ωпр3 - третья промежуточная частота, а на диспетчерском пункте контроля, наоборот, сложные сигналы с фазовой манипуляцией излучают на частоте ω2, а принимают - на частоте ω1, частоты ωГ1 и ωГ2 гетеродинов разносят на значение второй промежуточной частоты ωГ2-ωГ1=ωпр2, в модулирующий код M1(t) на транспортном средстве включают идентификационный номер транспортного средства, его местоположение и параметры, определяющие техническое состояние его бортовых систем, в модулирующий код М2(t) диспетчерского пункта контроля включают команды на управление бортовыми системами транспортного средства, одновременно на транспортном средстве принимают GPS-сигнал на частоте ω3, усиливают его по мощности, преобразуют по частоте с использованием напряжения второго гетеродина с частотой ωГ2, выделяют напряжение второй промежуточной частоты ωпр2=ω3-ωГ2, перемножают его с напряжением второго гетеродина с частотой ωГ2, выделяют GPS-сигнал на частоте ωГ1 первого гетеродина, выделяют низкочастотное напряжение, используют его для определения местоположения транспортного средства и передают информацию о местоположении транспортного средства на диспетчерский пункт контроля.
Поставленная задача решается тем, что система материально-технического обеспечения с управлением местоположением транспортного средства, содержащая, в соответствии с ближайшим аналогом, железнодорожный вагон для перевозки по железнодорожному пути, погрузки и разгрузки сыпучего материала, глобальную систему местоопределения, спутники, панель солнечной батареи из фотоэлектрических преобразователей, установленную на вагон и электрически соединенную с источником электропитания, исполнительные устройства, приемник GPS-сигналов и микропроцессор, оборудованный электронной памятью для хранения данных, соответствующих местоположениям вагона, отображенным координатами глобальной системы позиционирования, и снабженный программой команд о разгрузке материала в зависимости от местоположения вагона, отличается от ближайшего аналога тем, что она снабжена двумя модемами, первый из которых размещен на транспортном средстве, а второй на диспетчерском пункте контроля, причем каждый модем содержит последовательно включенные микропроцессор, фазовый манипулятор, второй вход которого соединен с выходом задающего генератора, первый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемо-передающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина, усилитель второй промежуточной частоты, перемножитель, второй вход которого соединен с выходом второго гетеродина, полосовой фильтр и фазовый детектор, второй вход которого соединен с выходом первого гетеродина, а выход подключен к микропроцессору, при этом на транспортном средстве сложные сигналы с фазовой манипуляцией излучаются на частоте ω1=ωпр1=ωГ2, а принимаются на частоте ω2=ωпр3=ωГ1, а на диспетчерском пункте контроля, наоборот, сложные сигналы с фазовой манипуляцией излучаются на частоте ω2, а принимаются - на частоте ω1, частоты ωГ1 и ωГ2 гетеродинов разнесены на значение второй промежуточной частоты ωГ2-ωГ1=ωпр2, микропроцессор транспортного средства связан с исполнительными устройствами, а микропроцессор диспетчерского пункта контроля связан с пунктом управления, приемник GPS-сигналов выполнен в виде последовательно включенных приемной антенны, усилителя мощности, смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, перемножителя, второй вход которого соединен с выходом второго гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом первого гетеродина, а выход подключен к микропроцессору.
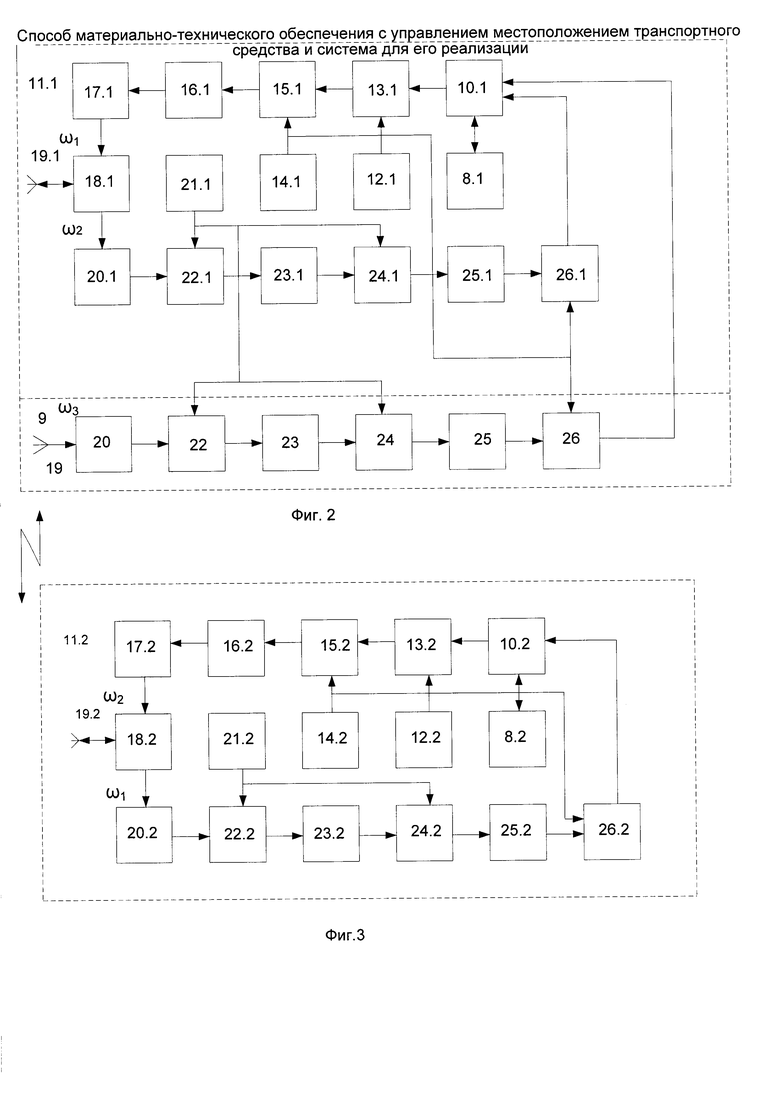
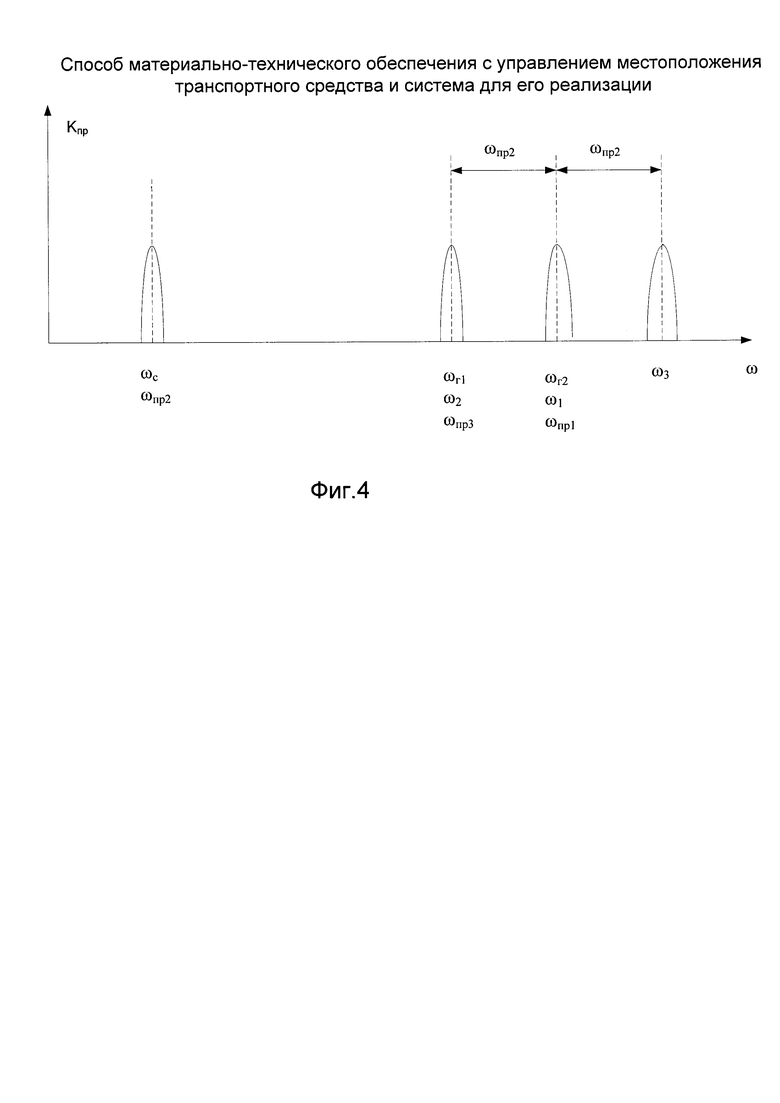
Структурная схема системы материально-технического обеспечения с управлением местоположением транспортного средства представлена на фиг. 1. Структурная схема первого модема 11.1 и приемника 9 GPS-сигналов представлена на фиг. 2. Структурная схема второго модема 11.2 представлена на фиг. 3. Частотная диаграмма, поясняющая преобразование сигналов, изображена на фиг. 4.
Система 1 материально-технического обеспечения с управлением местоположением транспортного средства содержит глобальную систему 2 местоопределения транспортного средства 4 на железнодорожном полотне 5, спутники 3.i (i=1. 2, … 24), источник 6 электропитания, соединенный с панелью 7 солнечной батареи из фотоэлектрических преобразователей, исполнительные устройства 8, приемник 9 GPS-сигналов, микропроцессор 10.1 и модем 11.1.
Первый 11.1 и второй 11.2 модемы содержат последовательно включенные микропроцессор 10.1 (10.2), связанный с исполнительными устройствами 8.1 (пульт управления 8.2), фазовый манипулятор 13.1 (13.2), второй вход которого соединен с выходом задающего генератора 12.1 (12.2), первый смеситель 15.1 (15.2), второй вход которого соединен с выходом первого гетеродина 14.1 (14.2), усилитель 16.1 (16.2) первой промежуточной частоты, первый усилитель 17.1 (17.2) мощности, дуплексер 18.1 (18.2), вход-выход которого связан с приемо-передающей антенной 19.1 (19.2), второй усилитель 20.1 (20.2) мощности, второй смеситель 22.1 (22.2), второй вход которого соединен с выходом второго гетеродина 21.1 (21.2), усилитель 23.1 (23.2) второй промежуточной частоты, перемножитель 24.1 (24.2), второй вход которого соединен с выходом второго гетеродина 21.1 (21.2), полосовой фильтр 25.1 (25.2) и фазовый детектор 26.1(26.2), второй вход которого соединен с выходом первого гетеродина 14.1 (14.2), а выход подключен к микропроцессору 10.1 (10.2).
Приемник 9 GPS-сигналов выполнен в виде последовательно включенных приемной антенны 19, усилителя 20 мощности, смесителя 22, второй вход которого соединен с выходом второго гетеродина 21.1, полосового фильтра 25 и фазового детектора 26, второй вход которого соединен с выходом первого гетеродина 14.1, а выход подключен к микропроцессору 10.1.
Предлагаемый способ реализуют следующим образом.
Система 1 материально-технического обеспечения, реализующая предлагаемый способ, установлена на транспортном средстве, например на железнодорожном вагоне 4, передвигающемся по железнодорожному пути 5 с целью управления операциями погрузки и разгрузки, например сыпучего материала, имеет глобальную систему 2 местоопределения, спутники 3.i (i=1. 2, … 24), панель 7 солнечной батареи из фотоэлектрических преобразователей, установленную на вагоне 4 и электрически соединенную с источником 6 электропитания, исполнительные устройства, приемник 9 GPS-сигналов, микропроцессор 10.1 и первый модем 11.1.
Сыпучий материал загружают в железнодорожный вагон 4, программируют бортовой микропроцессор 10.1 командами о разгрузке материала и координатами местоположения в глобальной системе позиционирования, в котором должна произойти названная операция разгрузки. Принимают приемником 9 GPS-сигналы, сравнивают координаты местоположения железнодорожного вагона 4, принятые приемником 9 GPS-сигналов, с координатами, соответствующими положению, в котором должна произойти операция разгрузки, и в случае их совпадения выгружают названный материал.
Каждый спутник 3.i (i=1.2, … 24) излучает на частоте ω3 (ω3 может быть равна 1.575 МГц) специальный навигационный сигнал в виде бинарного фазоманипулированного (ФМИ) сигнала, манипулированного по фазе псевдослучайной последовательностью (ПСП) длиной 1023 (N=1023).
Uc(t)=Vccos[ω3t+φk(t)+φ3], 0≤t≤T3,
где φk(t)={0. π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с ПСП длительностью N=1023.
Данный сигнал принимается антенной 19 и через усилитель 20 мощности на первый вход смесителя 20, на второй вход которого подается напряжение второго гетеродина 21.1:
UГ2(t)=VГ2Ccos(ωГ2t+φГ2t).
На выходе смесителя 23 образуется напряжение комбинационных частот. Усилителем 23 выделяется напряжение второй промежуточной частоты

где Vпр2=½Vc×VГ2:
ωпр2=ω3-ωГ2 - вторая промежуточная (разностная) частота;
φпр2=φ3-φГ2,
которое поступает на первый вход перемножителя 24. На второй вход последнего подается напряжение UГ2(t) гетеродина.
На выходе перемножителя образуется напряжение:

где V1=Vпр2×VГ2;
ωГ1=ωГ2-ωпр2;
φГ1=φГ2-φпр2;
которое представляет собой ФМН сигнал на частоте ωГ1 первого гетеродина 14.1, выделяется полосовым фильтром 25 и поступает на первый (информационный) вход фазового детектора 26, на второй вход которого в качестве опорного напряжения подается напряжение UГ1(t) гетеродина 14.1. В результате синхронного детектирования на выходе фазового детектора 26 образуется низкочастотное напряжением:

где VH=½V1×VГ1,
которое поступает в микропроцессор 10.1, где определяется местоположение транспортного средства (широта и долгота). Для этого достаточно присутствие транспортного средства в зоне радиовидимости трех спутников. Точность определения местоположения транспортного средства несколько десятков метров не является удовлетворительной.
Один из основных методов повышения точности определения местоположения транспортного средства и устранения ошибок, связанных с введением режима селективного доступа, основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Для этого используется диспетчерский пункт контроля, координаты которого точно известны благодаря прецизионной геодезической съемки. Между транспортным средством и диспетчерским пунктом контроля устанавливается дуплексная радиосвязь. С транспортного средства на диспетчерский пункт контроля передаются измененные координаты транспортного средства. На диспетчерском пункте рассчитываются соответствующие поправки, которые передаются на транспортное средство. В результате чего точность определения местоположения транспортного средства оценивается несколькими десятками сантиметров.
Модемы 11.1 и 11.2 работают следующим образом.
Задающим генератором 12.1 формируется гармоническое колебание

которое поступает на первый вход фазового манипулятора 13.1, на второй вход которого подается моделирующий код M1(t) с выхода микропроцессора 10.1. В качестве моделирующего кода M1(t) могут быть идентификационный номер транспортного средства, его местоположение и состояние бортовых систем и датчиков. На выходе фазового манипулятора 13.1 формируется сложный ФМН сигнал

где φk1(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции с моделирующим кодом M1(t), причем φk1(t)=const, при kτэ<t<(k+1)τэ, и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=1, 2, … Ni);
τэ, N1 - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc1 (Tc1=τэ×N1), который поступает на первый вход смесителя 15.1, на второй вход которого подается z напряжение гетеродина 14.1

На выходе смесителя 15.1 образуются напряжения комбинационных частот. Усилителем 16.1 выделяется напряжение первой промежуточной (суммарной) частоты.

где Vпр1=½Vc1×VГ1;
ωпр1=ωc+ωГ1 - первая промежуточная (суммарная) частота (фиг. 4);
φпр1=φс1+φГ1.
Это напряжение после усиления в усилителе 17.1 мощности через дуплексер 18.1 поступает в приемо-передающую антенну 19.1, излучается ею в эфир на частоте ω1=ωпр1, улавливается приемо-передающей антенной 19.2 диспетчерского пункта контроля и через дуплексер 18.2 и усилитель 20.2 мощности поступает на первый вход смесителя 22.2, на второй вход которого подается напряжение гетеродина 21.2:

На выходе смесителя 22.2 образуются напряжения комбинационных частот. Усилителем 23.2 выделяется напряжение второй промежуточной (разностной) частоты:

где Vпр3=½Vпр1×VГ1;
φup2=φпр1-φГ1, вторая промежуточная (разностная) частота;
φup3=φпр1-φГ1,
которое поступает на первый вход перемножителя 24.2, на второй вход которого подается напряжение UГ1(t) гетеродина 21.2. На выходе перемножителя 24.2 образуется напряжение:

где Vпр3=½Vпр3×VГ1
которое выделяется полосовым фильтром 25.2 и поступает на первый (информационный) вход фазового детектора 26.2, на второй (опорный) вход которого подается напряжение гетеродина 14.2:

В результате синхронного детектирования на выходе фазового детектора 26.2 образуется низкочастотное напряжение

где UH1=½V3×VГ2,
пропорциональное моделирующему коду M1(t), которое поступает в микропроцессор 10.2 для регистрации и анализа.
На диспетчерском пункте контроля задающим генератором 12.2 формируется гармоническое колебание.

которое поступает на первый вход фазового манипулятора 13.2, на второй вход которого подается моделирующий код М2(1) с выхода микропроцессора 10.2. В качестве моделирующего кода M2(t) могут быть команды на управление соответствующими бортовыми системами транспортного средства и дифференциальные поправки. На выходе фазового манипулятора 13.2 образуется ФМН сигнал

где φk2(t) - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с моделирующим код М2(t), который поступает на первый вход смесителя 15.2, на второй вход которого подается напряжение гетеродина 14.2

на выходе смесителя 15.2 образуется напряжение комбинационных частот. Усилителем 16.2 выделяют напряжение третьей промежуточной (разностной) частоты

где 
 - третья промежуточная (разностная) частота;
- третья промежуточная (разностная) частота;

которое после усиления в усилителе 17.2 мощности через дуплексер 18.2 поступает в приемо-передающую антенну 19.2, излучается ею в эфир на частоте ω2=ωпр3, улавливается приемо-передающей антенной 19.1 и через дуплексер 18.1 и усилитель 20.1 мощности поступает на первый вход смесителя 22.1, на второй вход которого подается напряжение UГ2(t) гетеродина 21.1. На выходе смесителя 22.1 образуются напряжения комбинационных частот. Усилителем 23.1 выделяется напряжение второй промежуточной (разностной) частоты

где 
 - вторая промежуточная (разностная) частота;
- вторая промежуточная (разностная) частота;

которое поступает на первый вход перемножителя 24.1, на второй вход которого подается напряжение UГ2(t) гетеродина 21.1. На выходе перемножителя 24.1 образуется напряжение

где V5=½Vпp5×VГ2;
ωГ1=ωГ2-ωпр2,
которое выделяется полосовым фильтром 25.1 и поступает на первый вход фазового детектора 26.1, на второй вход которого подается напряжение UГ1(t) гетеродина 14.1, в результате синхронного детектирования на выходе фазового детектора 26.1 образуется низкочастотное напряжение

где VH2=½V5×VГ1,
пропорциональное модулирующему коду M2(t), которое поступает в микропроцессор 10.1 для регистрации и управления исполнительными устройствами.
При этом частоты ωГ1 и ωГ2 гетеродинов разнесены на значение второй промежуточной частоты

Модем 11.1, размещаемый на транспортном средстве, излучает сложные сигналы с фазовой манипуляцией на частоте ω1=ωпр1=ωГ2, а принимает на частоте ω2=ωпр3=ωГ1. Модем 11.2, размещаемый на диспетчерском пункте контроля, наоборот, излучает сложные ФМН сигналы на частоте ω2, а принимает - на частоте ω1.
Таким образом, предлагаемые способ и система по сравнению с базовыми объектами и другими техническими решениями аналогичного назначения обеспечивают расширение функциональных возможностей и повышение эффективности материально-технического обеспечения транспортного средства. Это достигается за счет установления дуплексной радиосвязи между транспортным средством и диспетчерским пунктом контроля с использованием двух частот ω1, ω2 и сложных сигналов с фазовой манипуляцией.
Кроме того, использование диспетчерского пункта контроля, координаты которого точно известны благодаря претизионной геодезической съемки, позволяет значительно повысить точность определения местоположения транспортного средства за счет реализации дифференциального режима.
Сложные ФМН сигналы обладают высокой помехоустойчивостью, энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМН сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМН сигнала отнюдь не мала. Она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМН сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМН сигналов априорно неизвестной структуры с целью повышения чувствительности приемников.
Сложные ФМН сигналы позволяют применять современный вид селекции - структурную селекцию. Это значит, что появляется возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ материально-технического обеспечения управления местоположением транспортного средства при восстановлении объектов инфраструктуры и система для его реализации | 2019 |
|
RU2724079C1 |
| Способ транспортировки твердых коммунальных отходов с управлением местоположением транспортного средства и система его реализации | 2022 |
|
RU2773736C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| Компьютерная система дистанционного управления навигационными комплексами для автоматизированного мониторинга окружающей среды в условиях Арктики | 2019 |
|
RU2723928C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2012 |
|
RU2507555C2 |
| Компьютерная система дистанционного управления навигационными комплексами для автоматизированного мониторинга окружающей среды в условиях Арктики | 2019 |
|
RU2732318C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2005 |
|
RU2301437C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2017 |
|
RU2656972C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2262457C1 |

Группа изобретений относится к области автоматики и связи на железнодорожном транспорте. Система, реализующая способ материально-технического обеспечения с управлением местоположением транспортного средства, содержит глобальную систему местоопределения, спутники, железнодорожный вагон, железнодорожное полотно, источник электропитания, солнечную панель, исполнительные устройства, приемник GPS-сигналов, микропроцессоры и модемы. Причем каждый модем содержит микропроцессор, задающий генератор, смеситель, первый гетеродин, фазовый манипулятор, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, приемопередающую антенну, второй усилитель мощности, второй гетеродин, второй смеситель, усилитель второй промежуточной частоты, перемножитель, полосовой фильтр и фазовый детектор. Приемник GPS-сигналов включает в себя приемо-передающую антенну, усилитель мощности, смеситель, усилитель первой промежуточной частоты, полосовой фильтр и фазовый детектор. Достигается повышение эффективности материально-технического обеспечения транспортного средства. 2 н.п. ф-лы, 4 ил.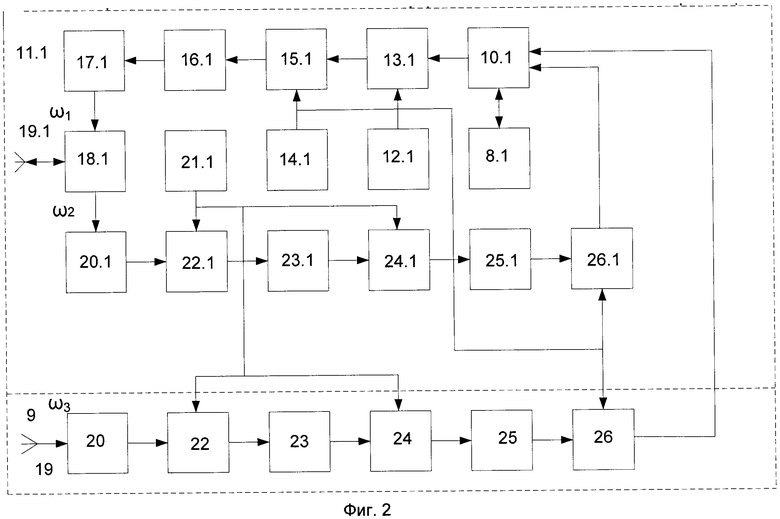
1. Способ материально-технического обеспечения с управлением местоположением транспортного средства, в ходе осуществления которого на транспортном средстве устанавливают приемное устройство глобальной системы позиционирования, загружают сыпучий материал в транспортное средство, программируют бортовой микропроцессор командами о разгрузке материала и координатами местоположения в глобальной системе позиционирования, в котором должна произойти названная операция разгрузки, принимают сигналы глобальной системы позиционирования при помощи приемного устройства, сравнивают координаты местоположения в глобальной системе позиционирования, принятые приемным устройством, с координатами в глобальной системе позиционирования, соответствующие положению, в котором должна произойти названная операция разгрузки, и выгружают названный материал из транспортного средства, отличающийся тем, что между транспортным средством и диспетчерским пунктом контроля, координаты которого определяют в результате прецизионной геодезической съемки, устанавливают дуплексную радиосвязь с использованием двух частот ω1, ω2 и сложных сигналов с фазовой манипуляцией, на транспортном средстве и диспетчерском пункте контроля формируют высокочастотное колебание на частоте ωс, манипулируют его по фазе моделирующим кодом, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωr1 первого гетеродина, выделяют напряжение первой промежуточный частоты ωпр1=ωс+ωГ1, усиливают его по мощности, излучают в эфир, принимают на другом объекте, усиливают по мощности, преобразуют по частоте с использованием частоты ωГ1 второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2=ωпр1-ωГ1=ωс, перемножают с напряжением второго гетеродина с частотой ωГ1, выделяют сложный сигнал с фазовой манипуляцией на частоте ωГ2 первого гетеродина, осуществляют его синхронное детектирование с использованием напряжения первого гетеродина с частотой ωГ2 в качестве опорного напряжения, выделяют низкочастотное напряжение, пропорциональное моделирующему коду, регистрируют и анализируют его, при этом на транспортном средстве сложные сигналы с фазовой манипуляцией излучают на частоте ω1=ωпр1=ωГ2, а принимают на частоте ω2=ωпр3=ωГ1, где
ωпр3 - третья промежуточная частота, а на диспетчерском пункте контроля, наоборот, сложные сигналы с фазовой манипуляцией излучают на частоте ω2, а принимают - на частоте ω1, частоты ωГ1 и ωГ2 гетеродинов разносят на значение второй промежуточной частоты
ωГ2-ωГ1=ωпр2,
в моделирующий код M1 (t) на транспортном средстве включают идентификационный номер транспортного средства, его местоположение и параметры, определяющее техническое состояние его бортовых систем, в моделирующий код М2 (t) диспетчерского пункта контроля включают команды на управления бортовыми системами транспортного средства, одновременно на транспортном средстве принимают GPS - сигнал на частоте ω3, усиливают его по мощности, преобразуют по частоте с использованием напряжения второго гетеродина с частотой ωГ2, выделяют напряжение второй промежуточной частоты ωпр2=ω3-ωГ2, перемножают его с напряжением второго гетеродина с частотой ωГ2, выделяют GPS- сигнал на частоте ωГ1 первого гетеродина осуществляют его синхронное детектирование с использованием напряжения первого гетеродина с частотой ωГ1 в качестве опорного напряжения, выделяют низкочастотное напряжение, используют его для определения местоположения транспортного средства и передают информацию о местоположении транспортного средства на диспетчерский пункт контроля.
2. Система материально-технического обеспечения с управлением местоположением транспортного средства, содержащая железнодорожный вагон для перевозки по железнодорожному пути, погрузки и разгрузки сыпучего материала, глобального систему местоопределения, спутники, панель солнечной батареи из фотоэлектрических преобразователей, установленную на вагон и электрически соединенную с источником электропитания, исполнительные устройства, приемник GPS - сигналов и микропроцессор, оборудованный электронной памятью для хранения данных, соответствующих местоположениям вагона, отображенным координатами глобальной системы позиционирования, и снабженный программой команд о разгрузке материала в зависимости от местоположения вагона, отличающаяся тем, что она снабжена двумя модемами, первый из который размещен на транспортном средстве, а второй на диспетчерском пункте контроля, причем каждый модем содержит последовательно включенные микропроцессор, фазовый манипулятор, второй вход которого соединен с выходом задающего генератора, первый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина, полосовой фильтр и фазовый детектор, второй вход которого соединен с выходом первого гетеродина, а выход подключен к микропроцессору, при этом на транспортном средстве сложные сигналы с фазовой манипуляцией излучаются на частоте
ω1=ωпр2=ωГ2, а принимаются на частоте ω2=ωпр3=ωГ1, а на диспетчерском пункте контроля, наоборот, сложные сигналы с фазовой манипуляцией излучаются на частоте ω2, а принимаются на частоте ω1, частоты ωГ1 и ωГ2 гетеродинов разнесены на значение второй промежуточной частоты
ωГ2-ωГ1=ωпр2,
микропроцессор транспортного средства связан с исполнительными устройствами, а микропроцессор диспетчерского пункта контроля связан с пультом управления, приемник GPS-сигналов выполнен в виде последовательно включенных приемной антенны, усилителя мощности, смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты перемножителя, второй вход которого соединен с выходом второго гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом первого гетеродина, а выход подключен к микропроцессору.
| СИСТЕМА И СПОСОБ МАТЕРИАЛЬНО-ТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ С УПРАВЛЕНИЕМ МЕСТОПОЛОЖЕНИЕМ | 2000 |
|
RU2258909C2 |
| СИСТЕМА ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА МУСОРНЫМИ КОНТЕЙНЕРАМИ | 2012 |
|
RU2490197C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2010 |
|
RU2435228C1 |
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2010 |
|
RU2425423C1 |
| JP 8030829 A, 02.02.1996. | |||

