Предлагаемое устройство относится к транспортным средствам и может быть применено для обеспечения автоматического регулирования схождения управляемых колес автотранспортного средства в процессе движения.
Известно устройство для автоматического регулирования схождения управляемых колес транспортного средства в движении, содержащее датчики боковых сил, действующих на управляемые колеса, реле, подвижные контакты которых связаны с соответствующими датчиками боковых сил, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, связанные с неподвижными контактами реле (А.с. СССР №905692, 15.02.1982, Бюл. №6).
Недостатком данного устройства является низкая надежность, вызванная наличием реле с подвижными и неподвижными контактами, которые могут срабатывать при колебаниях управляемых колес.
Наиболее близким к предлагаемому устройству является устройство для автоматического регулирования схождения управляемых колес в процессе движения, содержащее реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, связанную с датчиками боковой реакции дороги, действующей на управляемые колеса, в качестве которых используют наружные и внутренние упругие герметичные элементы в виде круглых баллонов, установленных на осях управляемых колес и герметично попарно соединенных между собой и с соответствующей полостью управляющего цилиндра (Патент РФ №2309078, 27.10.2007, Бюл. №30).
Устройство хорошо работает при значительном отклонении схождения управляемых колес, однако его недостатками являются низкая чувствительность, точность и надежность, т.к. при малом отклонении от правильного схождения управляемых колес, являющимся преимущественным в процессе движения, и, следовательно, малом перемещении поршня управляющего цилиндра ход золотника недостаточен для соединения соответствующей полости гидроцилиндра с насосом, и практически не устраняет отклонения в схождении, что приводит к сохранению повышенного износа шин и расхода топлива.
Техническим результатом предлагаемого устройства для автоматического регулирования схождения управляемых колес автотранспортного средства в движении является повышение чувствительности, точности, надежности и упрощение конструкции.
Указанный технический результат достигается тем, что устройство для автоматического регулирования схождения управляемых колес автотранспортного средства в движении, содержащее установленные на осях управляемых колес наружные и внутренние упругие герметичные элементы в виде круглых баллонов, являющиеся датчиками боковых реакций дороги, действующих на управляемые колеса, которые герметично попарно соединены между собой и с соответствующими трубопроводами, реверсивный механизм (гидроцилиндр) изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, включающую распределительное устройство и гидронасос, связанную с датчиками боковой реакции дороги, снабжено гидромеханическим включателем, состоящим из подвижных рабочих элементов, установленных в указанных трубопроводах, двуплечего рычага, установленного на неподвижной оси, конец короткого плеча которого имеет сферический наконечник, расположенный между головками подвижных рабочих элементов, а длинное плечо шарнирно соединено с регулировочной тягой, в свою очередь шарнирно связанной с золотником распределительного устройства.
Устройство для автоматического регулирования схождения управляемых колес автотранспортного средства в движении показано на чертеже, на котором изображена общая схема предлагаемого устройства.
Предлагаемое устройство включает в себя управляемые колеса 1, установленные через подшипники и втулки 2 на осях 3, на которых также установлены упругие герметичные наружные 4 и внутренние 5 датчики боковой реакции дороги. Оси 3 через боковые рычаги соединены поперечной рулевой тягой 6 переменной длины. Наружные 4 и внутренние 5 датчики боковой реакции дороги выполнены в виде круглых баллонов, имеющих одинаковые объемы, находятся под одинаковым давлением рабочей среды и соединены трубопроводами 7 и 8, в которых установлены подвижные рабочие элементы 9, каждый из которых состоит из цилиндрической части и головки. Между головками рабочих элементов 9 установлен сферический наконечник короткого плеча двуплечего рычага 10, установленного на неподвижной оси. Длинное плечо двуплечего рычага 10 шарнирно соединено с регулировочной тягой 11, в свою очередь шарнирно соединенной с золотником 12 распределительного устройства 13 потока рабочей жидкости. Устройство также содержит емкость 14, насос 15 и реверсивный механизм изменения рабочей длины поперечной рулевой тяги (гидроцилиндр) 16.
Датчики боковой реакции дороги 4 и 5, трубопроводы 7 и 8, гидромеханический включатель и распределительное устройство 13 потока рабочей жидкости образуют систему управления реверсивным механизмом изменения рабочей длины поперечной рулевой тяги 16.
Устройство работает следующим образом.
При прямолинейном движении автотранспортного средства и правильном схождении управляемых колес боковые реакции дороги на эти колеса отсутствуют, а давления рабочей среды в датчиках боковой реакции дороги 4 и 5 равны между собой, поэтому золотник 12 распределительного устройства 13 находится в центральном (нейтральном) положении, обеспечивая заданную длину поперечной рулевой тяги 6.
При отклонении схождения в положительную или отрицательную стороны управляемые колеса 1 за счет боковых реакций дороги через подшипники и втулки 2 будут воздействовать на внутренние 5 или наружные 4 датчики боковой реакции дороги и изменять давление в системе управления реверсивным механизмом изменения рабочей длины поперечной рулевой тяги 16. При этом возникающее повышенное давление рабочей жидкости в трубопроводах 7 или 8 будет воздействовать на один из подвижных рабочих элементов 9, которые в свою очередь через сферический наконечник двуплечего рычага 10 и регулировочную тягу 11 переместят золотник 12 распределительного устройства 13 влево или вправо. Так обеспечится подача рабочей жидкости от насоса 15 в соответствующую полость гидроцилиндра 16 реверсивного механизма изменения рабочей длины поперечной рулевой тяги 6, обеспечивая требуемое схождение колес.
Таким образом, предлагаемое устройство для автоматического регулирования схождения управляемых колес автотранспортного средства в движении упрощает конструкцию и позволяет обеспечить правильное схождение управляемых колес при различных режимах движения (разгоне, накате, торможении), что повышает чувствительность, точность, надежность и способствует снижению сопротивления движению, износа шин и расхода топлива.
Изобретение относится к транспортным средствам. Устройство для автоматического регулирования схождения управляемых колес автотранспортного средства в движении содержит датчики боковых реакций дороги, реверсивный механизм изменения рабочей длины поперечной рулевой тяги, систему управления указанным механизмом и гидромеханический включатель. Датчики боковых реакций дороги выполнены в виде наружных и внутренних упругих герметичных круглых баллонов. Баллоны установлены на осях управляемых колес и герметично соединены между собой и с соответствующей полостью управляющего цилиндра. Управляющий цилиндр состоит из подвижных рабочих элементов, установленных в трубопроводах, и двуплечего рычага. Конец короткого плеча двуплечего рычага имеет сферический наконечник, а длинное плечо двуплечего рычага шарнирно соединено с регулировочной тягой. Тяга шарнирно связана с золотником распределительного устройства. Сферический наконечник расположен между головками подвижных рабочих элементов. Достигается повышение точности и надежности автоматического регулирования схождения управляемых колес автомобиля в процессе движения. 1 ил.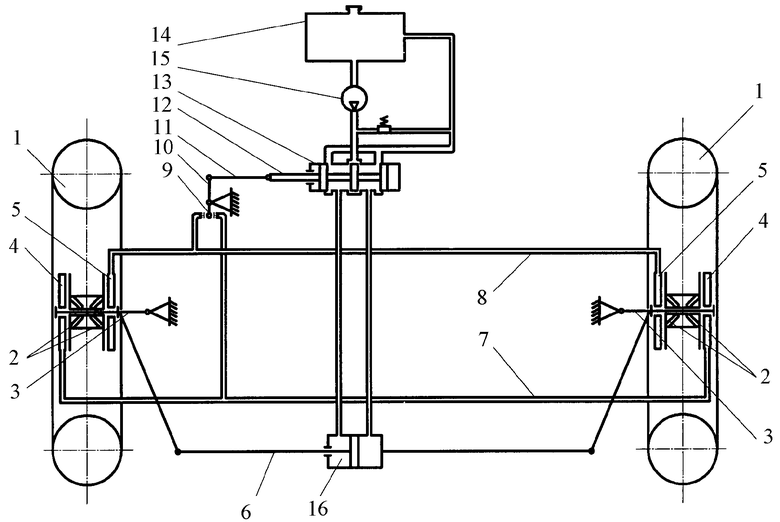
Устройство для автоматического регулирования схождения управляемых колес автотранспортного средства в движении, содержащее датчики боковых реакций дороги, действующих на управляемые колеса, в виде наружных и внутренних упругих герметичных круглых баллонов, установленных на осях управляемых колес и герметично соединенных между собой и с соответствующей полостью управляющего цилиндра, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, связанную с датчиками боковой реакции дороги, отличающееся тем, что оно снабжено гидромеханическим включателем, состоящим из подвижных рабочих элементов, установленных в трубопроводах, двуплечего рычага, установленного на неподвижной оси, конец короткого плеча которого имеет сферический наконечник, расположенный между головками подвижных рабочих элементов, а длинное плечо шарнирно соединено с регулировочной тягой, в свою очередь, шарнирно связанной с золотником распределительного устройства.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ПРОЦЕССЕ ДВИЖЕНИЯ | 2005 |
|
RU2309078C2 |
| JP 60169312 А, 02.09.1985 | |||
| US 5141069 А, 25.08.1992 | |||
| Устройство автоматического регулирования угла схождения управляемых колес транспортного средства | 1984 |
|
SU1207876A1 |

