Изобретение в общем имеет отношение к системам определения ориентации и обмена информацией (системам связи), а более конкретно к системе и способу обнаружения входного воздействия на взаимодействующий конструктивный элемент и передачи сигнала, главным образом соответствующего обнаруженному входному воздействию, с использованием модуляции электромагнитной несущей (электромагнитного колебания).
Предлагаемые система и способ могут быть использованы в самых различных областях применения. Одним из примеров подходящего применения предлагаемых системы и способа является применение совместно с взаимодействующим флюидальным элементом подвески, например, таким как пневматическая рессора транспортного средства. Предлагаемые система и способ будут описаны далее более подробно с конкретной ссылкой на использование совместно с флюидальным элементом подвески. Однако следует иметь в виду, что предлагаемые система и способ имеют более широкое применение и поэтому их применение не ограничено этим конкретным примером.
Множество хорошо известных и широко применяемых устройств уже используют для измерения или определения иным образом данных, связанных с входными воздействиями на взаимодействующий конструктивный элемент и/или с его параметрами. Такие устройства включают в себя, например, ультразвуковые датчики высоты, акселерометры, датчики температуры или термопары и/или реле давления. Однако такие устройства страдают различными недостатками, которые могут, в определенных обстоятельствах, нежелательно ограничивать их использование и применение. Эти недостатки являются особенно заметными в некоторых применениях, например, в которых используют устройства с относительным перемещением между его двумя компонентами. Это особенно относится к случаю, когда одним из компонентов является неподвижный компонент, а другой компонент движется относительно него.
Один из примеров такой схемы расположения может быть найден в системе подвески транспортного средства. В этом примере элемент шасси или панель кузова считают неподвижным компонентом, а поддерживающая колеса конструкция действует как подвижный компонент. Обычно желательно устанавливать устройства для измерения или определения параметров системы подвески и/или ее компонентов скорее на неподвижном компоненте, а не на подвижном компоненте. Это позволяет иметь больше вариантов крепления и часто упрощает установку устройства измерения на транспортном средстве. Кроме того, крепление устройства для измерения или определения параметров на неподвижном компоненте позволяет легче проводить и крепить провода электропитания и сигнальные провода на раме или кузове транспортного средства.
В свете описанного и по другим возможным причинам обычно избегают перемещения устройств для измерения или определения параметров на элементах системы подвески, которые движутся относительно неподвижного компонента, если только другие альтернативные решения не представляются нежелательными или невозможными по другим причинам. В таких исключительных случаях устройство измерения устанавливают на подвижном компоненте и его провода закрепляют вдоль подвижного компонента с использованием разгрузки механических напряжений или другого подходящего устройства, образованного или предусмотренного между подвижным и неподвижным компонентами. Одним из примеров такого применения является определение мгновенного ускорения подвижного компонента главным образом в реальном масштабе времени. Такое мгновенное ускорение измеряют для того, чтобы можно было отрегулировать другой компонент, например, такой как амортизатор, для компенсации ускорения.
Несмотря на то, что ускорение может быть измерено различными путями с использованием различных устройств и/или расчетов, использование акселерометра позволяет получать точные данные или другие выходные сигналы главным образом в реальном масштабе времени. Кроме того, акселерометры являются компактными, относительно дешевыми и обычно главным образом прочными. Поэтому использование акселерометра часто является предпочтительным для измерения ускорения колеса или элемента подвески транспортного средства. Однако известные акселерометры обычно имеют один или несколько проводов электропитания датчика и проводов для передачи сигналов и/или данных. Такие провода должны проходить от рамы или кузова транспортного средства к акселерометру, причем по меньшей мере один участок провода подвергается движениям изгиба между ними, когда компоненты движутся друг относительно друга. Эти повторяющиеся движения изгиба могут приводить к обрывам провода за счет его усталости и/или других проблем. Более того, при этом провод часто подвергается нежелательным воздействиям окружающей среды и загрязняющих веществ, например, таких как грязь, вода и соль. Это может нежелательным образом приводить к ухудшению свойств провода и/или его изоляции, что может ускорять наступление усталости провода и быстрее приводить к обрывам провода. Кроме того, провод подвергается ударам от камней на дороге, которые могут повреждать сам провод и/или его соединение с датчиком.
Таким образом, желательно создать устройство, систему и способ определения ориентации и обмена информацией, которые позволяют исключить эти и другие недостатки.
Сущность изобретения
Предлагается система определения ориентации и обмена информацией для использования на взаимодействующем конструктивном элементе, испытывающем внешнее воздействие, причем указанная система содержит приемопередатчик, способный передавать по радио электромагнитное колебание, и ответчик, расположенный на некотором расстоянии от приемопередатчика. Датчик закреплен на взаимодействующем конструктивном элементе и имеет связь с ответчиком. Датчик может вырабатывать выходной сигнал, несущий информацию о внешнем воздействии. Ответчик принимает электромагнитное колебание и выходной сигнал датчика и создает модуляцию электромагнитного колебания в зависимости от (связанную с) выходного сигнала датчика.
Предлагается система определения ориентации и обмена информацией для использования на взаимодействующих первом и втором конструктивных элементах, которые расположены на некотором расстоянии друг от друга, причем взаимодействующий второй конструктивный элемент претерпевает внешнее воздействие, при этом указанная система содержит приемопередатчик, закрепленный (установленный) на взаимодействующем первом конструктивном элементе и способный передавать по радио электромагнитное колебание. Ответчик установлен на взаимодействующем втором конструктивном элементе и принимает электромагнитное колебание. Датчик установлен на взаимодействующем втором конструктивном элементе и имеет связь с ответчиком. Датчик генерирует выходной сигнал в зависимости от внешнего воздействия. Ответчик принимает выходной сигнал датчика и модулирует электромагнитное колебание в зависимости по меньшей мере от одного параметра, выбранного из группы, в которую входят выходной сигнал датчика и расстояние.
Предлагается способ передачи входного уровня внешнего входного воздействия, действующего на взаимодействующий конструктивный элемент, причем указанный способ предусматривает использование приемопередатчика, который способен передавать по радио электромагнитное колебание. Способ также предусматривает использование ответчика, закрепленного на взаимодействующем конструктивном элементе и расположенного на некотором расстоянии от приемопередатчика, и использование датчика, закрепленного на взаимодействующем конструктивном элементе поблизости от ответчика. Датчик может вырабатывать выходной сигнал, соответствующий входному уровню внешнего воздействия. Способ дополнительно предусматривает подачу питания на приемопередатчик и передачу по радио электромагнитного колебания, и выработку выходного сигнала датчика. Способ также предусматривает создание модуляции электромагнитного колебания в зависимости от выходного сигнала датчика и определение входного уровня внешнего воздействия на основании модуляции.
Предлагается узел пневматической рессоры в соответствии с предложенной новой концепцией, который содержит первый концевой элемент, второй концевой элемент, расположенный на некотором расстоянии от первого концевого элемента и претерпевающий внешнее воздействие, и гибкую стенку, закрепленную между первым и вторым концевыми элементами. Приемопередатчик установлен на первом концевом элементе и может передавать по радио электромагнитное колебание. Ответчик установлен на втором концевом элементе и может принимать электромагнитное колебание. Датчик установлен на втором концевом элементе и имеет связь с ответчиком. Датчик может измерять внешнее входное воздействие на второй концевой элемент и вырабатывать соответствующий выходной сигнал датчика. Ответчик принимает выходной сигнал датчика и создает модуляцию электромагнитного колебания в ответ на выходной сигнал датчика.
Предлагается система связи в соответствии с предложенной новой концепцией, предназначенная для системы подвески транспортного средства, имеющей первый компонент транспортного средства и второй компонент транспортного средства, претерпевающий входное воздействие на подвеску, причем система связи содержит приемопередатчик, установленный на первом компоненте транспортного средства и позволяющий передавать по радио электромагнитное колебание. Ответчик установлен на втором компоненте транспортного средства, на некотором расстоянии от приемопередатчика, и имеет связь с ним. Датчик установлен на втором компоненте транспортного средства и может обнаруживать входное воздействие на подвеску, причем датчик имеет связь с ответчиком и может вырабатывать выходной сигнал датчика, соответствующий входному воздействию на подвеску. Ответчик может принимать выходной сигнал от датчика и создавать модуляцию электромагнитного колебания в ответ на прием этого сигнала.
Предлагается способ определения значения параметра элемента подвески транспортного средства в соответствии с предложенной новой концепцией, который предусматривает использование приемопередатчика, позволяющего передавать по радио электромагнитное колебание, и использование ответчика, установленного на элементе подвески транспортного средства и расположенного на некотором расстоянии от приемопередатчика. Способ также предусматривает использование датчика, установленного на элементе подвески транспортного средства поблизости от ответчика, причем датчик может вырабатывать выходной сигнал датчика, соответствующий параметру элемента подвески транспортного средства. Способ также предусматривает подачу питания на приемопередатчик и передачу по радио электромагнитного колебания. Способ дополнительно предусматривает выработку выходного сигнала датчика и создание модуляции электромагнитного колебания в ответ на выходной сигнал датчика. Способ дополнительно предусматривает определение значения параметра элемента подвески транспортного средства на основании модуляции.
Краткое описание чертежей
На фиг.1 схематично показан первый вариант системы индикации (указания) расстояния в соответствии с изобретением.
На фиг.2 схематично показан альтернативный вариант приемопередатчика, показанного на фиг.1.
На фиг.3 показана принципиальная электрическая схема варианта приемопередатчика, показанного на фиг.1.
На фиг.4 схематично показан первый вариант ответчика.
На фиг.5 показана принципиальная электрическая схема варианта ответчика, показанного на фиг.4.
На фиг.6 показана примерная электромагнитная несущая, имеющая модулированный участок.
На фиг.7 показана схема последовательности операций, иллюстрирующая операции способа индикации расстояния.
На фиг.8 показан вид сбоку, частично в разрезе, флюидального элемента подвески, высоту которого определяет закрепленная на нем система.
На фиг.9 схематично показан другой альтернативный вариант приемопередатчика.
На фиг.10 схематично показан альтернативный вариант ответчика.
На фиг.11 показана электромагнитная несущая, модулированная с использованием частотной манипуляции.
На фиг.12 показана электромагнитная несущая, модулированная с использованием фазовой манипуляции.
На фиг.13 показана принципиальная электрическая схема варианта ответчика, показанного на фиг.10.
На фиг.14 показан схема последовательности операций, иллюстрирующая операции другого способа индикации расстояния.
На фиг.15 схематично показан вариант системы определения ориентации и обмена информацией.
На фиг.16 схематично показан альтернативный вариант приемопередатчика, показанного на фиг.15.
На фиг.17 схематично показан другой альтернативный вариант ответчика.
На фиг.18 показана принципиальная электрическая схема варианта ответчика, показанного на фиг.17.
На фиг.19 показана схема последовательности операций, иллюстрирующая операции еще одного способа определения ориентации и обмена информацией.
На фиг.20 показана схема последовательности операций, иллюстрирующая операции другого способа определения ориентации и обмена информацией.
Подробное описание изобретения
Обратимся теперь к более подробному рассмотрению чертежей, на которых показаны только для пояснения предпочтительные варианты предложенных новой системы, устройства и/или способа, не имеющие ограничительного характера. На фиг.1 схематично показана система указания расстояния, которая содержит приемопередатчик 100, используемый совместно с ответчиком TSP, который расположен на некотором расстоянии DST от приемопередатчика. Следует иметь в виду, что ответчик TSP является просто представительным примером подходящего ответчика, взаимодействующего с приемопередатчиком, таким как приемопередатчик 100, причем конструкция и работа примерных вариантов подходящих ответчиков обсуждается далее более подробно. Приемопередатчик 100 выполнен с возможностью передачи по радио электромагнитного сигнала, такого как, например, электромагнитная (ЭМ) несущая CWV, в направлении ответчика TSP.
Приемопередатчик 100 содержит генератор 102 несущей, имеющий электрическую связь с антенной 104. Генератор 102 несущей может подавать выходной электрический сигнал несущей на антенну 104, которая, в свою очередь, может передавать по радио электромагнитную несущую, такую как несущую CWV, например, соответствующую выходному сигналу генератора 102 несущей. Детектор 106 модуляции также имеет электрическую связь с антенной 104 и выполнен с возможностью обнаружения модуляции электрической характеристики вдоль или поперек антенны. Детектор модуляции вырабатывает выходной электрический сигнал, такой как напряжение или ток, например, в соответствующей зависимости от амплитуды модуляции вдоль или поперек антенны. На фиг.1 показано, что детектор 106 модуляции вырабатывает выходной аналоговый сигнал, который может быть усилен усилителем 108 до передачи, как это показано стрелкой 110, на другие электронное устройство, схему или систему, например, на такое как электронный блок управления (не показан).
На фиг.1 показана также цепь 112 электропитания. Цепь электропитания может быть образована как часть полностью интегрированной схемы приемопередатчика 100 в виде отдельной схемы, конструктивно объединенной с приемопередатчиком 100, или в виде схемы, полностью отделенной от приемопередатчика 100. В соответствии с примерным вариантом, показанным на фиг.1, цепь электропитания 112 образована как часть полностью интегрированной схемы приемопередатчика. Однако, вне зависимости от конструкции, цепь 112 электропитания выполнена с возможностью подавать соответствующим образом стандартизованную и регулируемую электрическую энергию от источника питания (не показан) на компоненты приемопередатчика 100. Эти компоненты могут содержать, без ограничения, генератор 102 несущей, с которьм цепь электропитания 112, показанная на фиг.1, имеет прямую электрическую связь. Следует иметь в виду, что источником питания (не показан) может быть любой подходящий источник питания переменного тока или постоянного тока, например, такой как батарея (автомобильная или другая), генератор или генератор переменного тока, электронный блок управления или силовой модуль системы управления.
Как правило, антенна 104 приемопередатчика 100 может передавать по радио или иным образом выходной электромагнитный сигнал, например, такой как несущая CWV, как уже было упомянуто здесь выше. Антенна ANT ответчика TSP принимает несущую, которая имеет одну или несколько характеристик (или свойств), которые изменяются с расстоянием, что хорошо известно специалистам в данной области. Ответчик служит для возбуждения или создания иным образом модуляции несущей в зависимости от расстояния между приемопередатчиком и ответчиком. В одном из примеров такой работы, известном специалистам в данной области, антенны 104 и ANT действуют как обмотки трансформатора со слабой связью, когда на них воздействует несущая CWV. При этом, мгновенное изменение электрической характеристики или свойства одной антенны возбуждает или иным образом создает соответствующее изменение электрической характеристики или модуляцию вдоль или поперек другой антенны. Эта модуляция помогает определять расстояние DST между приемопередатчиком и ответчиком или, альтернативно, производить обмен данными между собой, как это обсуждается далее более подробно.
Альтернативный вариант приемопередатчика 200 показан на фиг.2 и содержит генератор 202 несущей, имеющий электрическую связь с антенной 204. Генератор 202 несущей выполнен с возможностью подачи выходного электрического сигнала несущей на антенну 204, которая принимает сигнал несущей от генератора и выполнена с возможностью радиопередачи электромагнитной несущей, например, такой как несущая CWV, соответствующей сигналу несущей с выхода генератора 202.
Детектор 206 модуляции также имеет электрическую связь с антенной 204 и выполнен с возможностью обнаружения модуляции электрической характеристики вдоль или поперек антенны. Детектор 206 модуляции вырабатывает аналоговый сигнал в зависимости от амплитуды модуляции вдоль или поперек антенны 204. Однако вместо усилителя аналогового выходного сигнала, как в приемопередатчике 100, приемопередатчик 200 содержит аналого-цифровой преобразователь (АЦП) 208, который имеет электрическую связь с детектором модуляции. Аналого-цифровой преобразователь принимает аналоговый сигнал от детектора 206 модуляции и преобразует его в поток цифровых данных. Поток цифровых данных от преобразователь 208 затем может быть передан обычным образом, например, на такое устройство, как микроконтроллер 210 или на другой компонент или другую систему. Следует иметь в виду, что такое устройство или другая система, которые содержат микроконтроллер 210, могут быть выполнены в виде единого целого с приемопередатчиком 200 или могут быть частью другой, отдельной системы. Например, такой процессор может иметь связь с шиной данных транспортного средства, например, такой как шина CAN, шина данных SAE J1 860, или с другой информационной системой транспортного средства.
Цепь 212 электропитания показана на фиг.2. Однако следует иметь в виду, что цепь 212 электропитания может иметь различные виды реализации или различные конфигурации, как уже было упомянуто здесь выше, чтобы подавать соответствующим образом стандартизованную и регулируемую мощность на схему 200.
Генераторы 102 и 202 несущей вырабатывают выходной электрический сигнал несущей, который можно передавать по радио как электромагнитную несущую при помощи взаимодействующей антенны. В соответствии с предпочтительным вариантом, выходной электрический сигнал генераторов 102 и 202 несущей представляет собой синусоидальное колебание, имеющее главным образом постоянную амплитуду и частоту; однако следует иметь в виду, что может быть использован и любой другой подходящий электрический сигнал несущей. Следует также иметь в виду, что выходной электрический сигнал генераторов может иметь любое подходящее напряжение, например, ориентировочно от 50 до 100 В, и может иметь любую подходящую частоту, например, ориентировочно от 100 КГц до 30 МГц. В соответствии с примерным вариантом электрический сигнал имеет частоту около 125 КГц и амплитуду около 100 В, однако эти величины могут меняться от одного применения к другому, как уже было упомянуто здесь выше.
Принципиальная электрическая схема 300 одного из вариантов приемопередатчика, например, такого как приемопередатчик 100, показана на фиг.3 и содержит схему 302 генератора несущей, антенный контур 304, схему 306 детектора модуляции и схему 308 усилителя. Следует иметь в виду, что схема 302 генератора в целом соответствует генераторам 102 и 202, показанным соответственно на фиг.1 и 2, а соответствующие узлы 304, 306 и 308 соответствуют антеннам 104 и 204, детекторам 106 и 206 модуляции и усилителю 108. Следует также иметь в виду, что аналого-цифровой преобразователь 208 и микроконтроллер 210 имеют типовую конструкцию, хорошо известную специалистам в данной области, так что специалисты легко могут электрически подключить аналого-цифровой преобразователь 208 к детектору 206 модуляции, даже если не показана его электрическая схема. Следует также иметь в виду, что в схеме 300 не предусмотрена цепь электропитания, соответствующая цепи электропитания 112 или 212. Однако следует иметь в виду, что схема 300 может альтернативно содержать цепь электропитания, даже в том случае, когда первичный источник питания содержит соответствующие схемы обработки и регулирования, позволяющие подводить к схеме 300 необходимую электрическую мощность. Более того, специалисты легко поймут, что схема 300 может быть выполнена как интегральная схема на одной подложке, например, такой как кремниевая пластина, или альтернативно может быть образована из дискретных компонентов с использованием любых подходящих технологий изготовления.
Как это показано на фиг.3, схема 300 содержит различные традиционные электрические компоненты, в том числе (но без ограничения) резисторы, конденсаторы, диоды, операционные усилители и дроссели. Следует иметь в виду, что эти компоненты имеют главным образом стандартную конструкцию, если специально не оговорено иное, и легко могут быть закуплены на рынке. Кроме того, различные участки схемы 300 соединены с положительной клеммой источника питания (не показан) или цепи электропитания (не показана) в одной или нескольких общих точках. Имеющие такое подключение участки схемы 300 заканчиваются показанными стрелками контактными зажимами 310. Аналогично, различные участки схемы 300, которые соединены с общей землей, заканчиваются показанными стрелками контактными зажимами 312.
Как уже было упомянуто здесь выше, схема 300 содержит множество операционных усилителей. Однако следует иметь в виду, что эти операционные усилители на фиг.3 показаны схематично с использованием традиционной конфигурации штырьковых выводов. Несмотря на то, что эти штырьковые выводы не имеют позиционных обозначений, следует иметь в виду, что каждый операционный усилитель имеет противоположные штырьковые выводы напряжения питания (SV штырьковые выводы), положительный входной штырьковый вывод (PI штырьковый вывод), отрицательный входной штырьковый вывод (N1 штырьковый вывод) и выходной штырьковый вывод (ОТ штырьковый вывод). Одним из примеров подходящего операционного усилителя является операционный усилитель типа LM248 фирмы Texas Instruments of Dallas, Texas.
Схема 302 генератора несущей содержит операционный усилитель 314, резисторы 316-324 и конденсатор 326. Операционный усилитель 314 имеет SV штырьковые выводы, подключенные к показанным стрелками контактным зажимам 310а и 312а. ОТ штырь подключен к делителю напряжения, образованному между показанными стрелками контактными зажимами 310b и 312b при помощи резисторов 316 и 318. ОТ штырьковый вывод подключен к делителю напряжения через резисторы 320 и 322 и образует контур обратной связи за счет PI штырькового вывода операционного усилителя 314, подключенного между резисторами 320 и 322. Дополнительно, ОТ штырьковый вывод операционного усилителя подключен к земле у показанного стрелкой контактного зажима 312с через резистор 324 и конденсатор 326. Контур обратной связи образован со штырьковым выводом ОТ за счет подключения NI штырькового вывода операционного усилителя между резистором 324 и конденсатором 326.
Электрический сигнал несущей со штырькового вывода ОТ операционного усилителя 314 поступает в антенный контур 304 по проводу 328. Антенный контур 304 содержит конденсатор 330, который имеет электрическую связь с землей у показанного стрелкой контактного зажима 312d через дроссель 332, который показан на фиг.3 при помощи стандартного символа. Однако следует иметь в виду, что может быть желательна подстройка или оптимизация антенны и, в таких ситуациях, может быть использован дроссель специфической конструкции, который, например, имеет квадратную форму. В соответствии с примерным вариантом, дроссель 332 представляет собой обмотку из провода, которая имеет кольцевую форму или форму петли.
Схема 306 обнаружения модуляции имеет электрическую связь с антенным контуром 304 по проводу 334, который подключен между конденсатором 330 и дросселем 332. Провод 334 имеет электрическую связь с NI штырьковым выводом операционного усилителя 336 через диод 338 и конденсатор 340. Операционный усилитель 336 имеет SV штырьковые выводы, соединенные с показанными стрелками контактными зажимами 310с и 312е. Контур обратной связи образован между ОТ и NI штырьковыми выводами операционного усилителя 336 при помощи провода 342, подключенного через диод 344 и резистор 346. PI штырьковый вывод операционного усилителя 336 подключен между показанными стрелками контактными зажимами 310d и 312f через резистор 348 и диод 350, соответственно. Диод 350 показан на фиг.3 как стабилитрон. Дополнительно, показанный стрелкой контактный зажим 312f подключен к NI штырьковому выводу операционного усилителя 336 при помощи провода 334 через резистор 352. Показанный стрелкой контактный зажим 312g подключен к проводу 334 раздельно через конденсатор 354 и резистор 356.
Схема 308 усилителя электрически подключена к схеме 306 обнаружения модуляции при помощи провода 358. Схема 308 усилителя содержит первый операционный усилитель 360, причем провод 358 подключен к PI штырьковому выводу и соединен с проводом 334 за счет подключения между NI штырьковым выводом операционного усилителя 336 и конденсатором 340. Операционный усилитель 360 имеет SV штырьковые выводы, подключенные к показанным стрелками контактным зажимам 310е и 312h. Контур обратной связи образован при помощи провода 362, подключенного между ОТ и NI штырьковыми выводами операционного усилителя 360. Диод 364 подключен к проводу 362, а NI штырьковый вывод операционного усилителя 360 также подключен к показанному стрелкой контактному зажиму 312i через резистор 366 и к показанному стрелкой контактному зажиму 312j через конденсатор 368. PI штырьковый вывод второго операционного усилителя 370 подключен к проводу 362 через диод 364, а NI штырьковый вывод операционного усилителя 360 через провод 372. Выходной соединитель 374 подключен к ОТ штырьковому выводу операционного усилителя 370 при помощи выходного провода 376. Контур обратной связи образован при помощи провода 378, подключенного между NI штырьковым выводом и проводом 376, подключенным между ОТ штырьковым выводом и выходным соединителем 374. Следует иметь в виду, что выходной соединитель 374, как правило, действует как устройство сопряжения с контактом 110 связи, показанный на фиг.1. Сам по себе соединитель 374 может быть соединителем любого подходящего типа и может иметь любую подходящую конфигурацию.
Ответчик 400 показан на фиг.4 и содержит антенну 402, силовую цепь 404 и шунтирующую цепь 406. Как правило, ответчик 400 находится на некотором расстоянии от одного из приемопередатчиков 100 или 200 и работает совместно с ними. Более конкретно, антенна 402 выполнена с возможностью приема электромагнитной несущей CWV, переданной по радио антенной приемопередатчика. Электромагнитная несущая возбуждает электрический выходной сигнал вдоль или поперек антенны. Этот электрический выходной сигнал поступает в силовую цепь 404, которая накапливает электрический выходной сигнал и периодически подает питание на шунтирующую цепь 406. Когда на нее подано питание, шунтирующая цепь производит короткое замыкание антенны 402. Это вызывает изменение электромагнитных свойств антенны 402, например, существенно уменьшает индуктивность антенны. Изменение электромагнитных свойств антенны 402 вызывает соответствующее изменение вдоль или поперек антенны соответствующего приемопередатчика, например, такого как приемопередатчик 100 или 200. Именно это изменение вдоль или поперек антенны соответствующего приемопередатчика обнаруживает связанный с ним детектор модуляции приемопередатчика, например, такой как детектор 106 или 206 модуляции.
В соответствии с одним примерным вариантом, антенна 402 ответчика 400 содержит индуктивный элемент (не показан). Именно вдоль или поперек этого индуктивного элемента электромагнитная несущая возбуждает электрический выходной сигнал, который передается в силовую цепь 404. Электрический выходной сигнал, который представляет собой электрический потенциал и/или электрический ток, накапливается в силовой цепи 404, которая, в ответ, передает импульс электрической энергии в шунтирующую цепь 406, после того, как определенное, заданное количество электрической энергии было накоплено в силовой цепи. Импульс электрической энергии заставляет шунтирующую цепь 406 создавать электрическое короткое замыкание индуктивного элемента антенны 402. Короткое замыкание индуктивного элемента уменьшает его индуктивность до нуля. Специалисты легко поймут, что это будет вызывать соответствующее изменение вдоль или поперек индуктивного элемента антенны в объединенном приемопередатчике, так как эти два элемента действуют как трансформатор со слабой связью. Именно это соответствующее изменение контролирует (измеряет) детектор модуляции. Такая возбужденная полевая модуляция (IFM) обозначена в целом синусоидальной волной IFM на фиг.4.
Электрическая принципиальная схема 500 одного варианта ответчика 400 показана на фиг.5 и содержит антенный контур 502, силовую цепь 504 и шунтирующую цепь 506. Как правило, антенный контур 502 соответствует антенне 402, показанной на фиг.4. Аналогично, силовая цепь 504 соответствует цепи 404, а шунтирующая цепь 506 соответствует цепи 406. Как уже было упомянуто здесь выше, контур 500 содержит множество традиционных электрических компонентов, в том числе (но без ограничения) резисторы, конденсаторы, диоды, операционные усилители и катушки индуктивности (дроссели). Следует иметь в виду, что эти компоненты главным образом имеют стандартную конструкцию, если специально не указано иное, и легко могут быть закуплены. Кроме того, схема 500 может быть выполнена в виде интегральной схемы на одной подложке, например, такой как кремниевая пластина, или, альтернативно, может быть собрана из дискретных компонентов с использованием любой подходящей технологии изготовления. Кроме того, различные участки схемы 500 подключены к общей земле, которая показана контактным зажимом 508 в виде стрелки.
Антенный контур 502 содержит конденсатор 510 и дроссель 512, подключенные в параллель между проводами 514 и 516, последний из которых подключен к показанному стрелкой контактному зажиму 508а рядом с дросселем 512. Дроссель показан на фиг.5 при помощи стандартного символа. Однако следует иметь в виду, что может быть желательна подстройка или оптимизация антенны, которую проводят, например, совместно с дросселем 332 антенного контура 304. В таких ситуациях, может быть использован дроссель специфической конструкции, который представляет собой обмотку из провода, которая имеет, например, квадратную форму, кольцевую форму или форму петли.
Силовая цепь 504 подключена к антенному контуру 502 через провода 514 и 516. Диод 518 и резистор 520 включены последовательно с проводом 514. Транзистор 522 и конденсатор 524 включены параллельно между проводами 514 и 516. Коллекторный вывод 522с транзистора 522 подключен к проводу 514, а эмиттерный вывод 522е транзистора подключен к проводу 516. Провод 526 подсоединяет базовый вывод 522b транзистора 522 к проводу 514 через диод 528. В соответствии с примерным вариантом, диод 518 представляет собой диод Шотки, а транзистор 522 представляет собой стандартный n-р-n транзистор, которые хорошо известны специалистам в данной области.
Шунтирующая цепь 506 подключена к силовой цепи 504 при помощи провода 530, который идет до коллекторного вывода 522с. Провод 530 подключен к верхней точке делителя напряжения, образованного резисторами 532 и 534, которые включены между проводом 530 и показанным стрелкой контактным зажимом 508b. Шунтирующая цепь также содержит операционный усилитель 536. Один SV штырьковый вывод операционного усилителя подключен к проводу 530 через провод 538, а другой SV штырьковый вывод подключен к показанному стрелкой контактному зажиму 508с. Провод 540 соединяет среднюю точку между резисторами 532 и 534 с PI штырьковым выводом операционного усилителя 536 через резистор 542. Контур обратной связи образован между ОТ и PI штырьковыми выводами операционного усилителя 536 при помощи провода 544, который образует соединение через резистор 546. ОТ штырьковый вывод операционного усилителя 536 также подключен к показанному стрелкой контактному зажиму 508d при помощи провода 548 через резистор 550 и конденсатор 552. NI штырьковый вывод операционного усилителя подключен при помощи провода 554 к средней точке между резистором 550 и конденсатором 552. Реле 556 подключено между ОТ штырьковым выводом операционного усилителя 536 и проводами 514 и 516 рядом с конденсатором 510, включенным параллельно дросселю 512. Следует иметь в виду, что вместо реле 556 может быть использовано устройство переключения любого подходящего типа, например, такое как полевой транзистор.
Антенна 502 ответчика введена в РЧ поле приемопередатчика, которое создает напряжение на (поперек) антенне 502. Это напряжение проходит через диод 518 в цепь 504 источника питания (в силовую цепь), которая регулирует напряжение на проводе 530 для надлежащей работы шунтирующей цепи 506. Резисторы 532 и 534 делят поступающее по проводу 530 напряжение для его сравнения с напряжением на проводе 554, подключенном к NI штырьковому выводу. Резистор 550 и конденсатор 552 контролируют скорость нарастания напряжения на проводе 554, подключенном к NI штырьковому выводу. Как только напряжение на проводе 554 превысит напряжение на PI штырьковом выводе, связанном со средней точкой между резисторами 546 и 542, появляется выходной сигнал на ОТ штырьковом выводе операционного усилителя 536. Это вызывает срабатывание реле 556 (или другого подходящего устройства, например, такого как полевой транзистор), которое шунтирует на землю антенну 502. Шунтирование антенны снимает напряжение с приемопередатчика и создает измеряемое изменение, позволяющее определить расстояние.
На фиг.6 показана одна примерная форма модуляции электромагнитной несущей CWV, имеющей стандартную синусоидальную форму колебаний и начальную амплитуду напряжения V. Несущая модулирована на интервале DT, в течение которого ее амплитуда уменьшена на величину DV. Примерный подходящий диапазон напряжения V составляет ориентировочно от 50 до 150 В. Примерный соответствующий диапазон амплитудной модуляции, отображенной величиной DV, составляет ориентировочно от 10 до 1000 мВ. Амплитудная модуляция может иметь любую подходящую длительность или интервал DT, например ориентировочно от 0.1 до 5 мс. Как уже было упомянуто здесь выше, несущая CWV может иметь любую подходящую частоту, например ориентировочно от 100 кГц до 14 МГц. Такую модуляцию специалисты обычно называют модуляцией рассеяния при отражении, и она может быть использована для организации передачи между ответчиком и приемопередатчиком.
Одним из хорошо известных примеров использования модуляции рассеяния при отражении является использование в системах идентификации радиочастот (RFID). Однако следует иметь в виду, что предложенная здесь новая концепция существенно отличается от традиционного применения RFID систем. В частности, традиционные RFID системы используют для передачи данных, которые кодированы внутри разового тега. Тег объединен с объектом, а данные типично содержат одну или несколько деталей, специфичных для этого объекта. Обычно RFID системы не используют для определения расстояния тега от других компонентов системы. Основной задачей этих RFID систем является считывание данных, закодированных внутри тега.
Примерная схема последовательности операций способа 700 показана на фиг.7 и содержит первую операция 702 использования приемопередатчика и ответчика, таких как, например, приемопередатчик 100 или 200 и ответчик 400, которые связаны друг с другом и находятся на расстоянии друг от друга. Другая операция 704 предусматривает радиопередачу электромагнитной несущей, такой как, например, несущая CWV, от антенны приемопередатчика к антенне ответчика. Следующая операция 706 предусматривает прием несущей при помощи антенны ответчика. Специалисты легко поймут, что электрическая энергия возбуждается при этом вдоль и/или поперек дросселя за счет воздействия принятых электромагнитных колебаний. Факультативная операция 708 предусматривает накопление электрической энергии, возбужденной вдоль и/или поперек антенны ответчика за счет воздействия принятой электромагнитной несущей. Следующая операция 710 предусматривает избирательное шунтирование антенны ответчика и за счет этого создание в антенне приемопередатчика модуляции ее одной или нескольких электрических характеристик, например кратковременное снижение напряжения. Дальнейшая операция 712 предусматривает обнаружение модуляции электрических характеристик вдоль или поперек антенны. Следующая операция 714 предусматривает определение расстояния между приемопередатчиком и ответчиком на основании, по меньшей мере частично, модуляции электрических характеристик в операции 712. Дальнейшая операция 716 предусматривает выдачу сигнала, указывающего расстояние, определенное в операции 714.
Один из примеров использования предлагаемой здесь новой концепции связан с элементом 800 флюидальной подвески, показанным на фиг.8. Более конкретно, элементом флюидальной подвески является пневматическая рессора, имеющая традиционную конструкцию с поршнем и свернутым лепестком. Однако следует иметь в виду, что элементом флюидальной подвески может быть элемент любого подходящего типа, стиля, вида и/или конфигурации, что не выходит за рамки использования предлагаемой здесь новой концепции. Элемент 800 флюидальной подвески содержит первый концевой элемент, например, такой как верхняя пластина 802, второй концевой элемент, например, такой как поршень 804, установленный на расстоянии от первого концевого элемента, и гибкий элемент, например, такой как гибкий рукав 806, поддерживаемый между ними и образующий внутренний объем, например, такой как флюидальная камера 808.
Приемопередатчик 810 установлен на верхней пластине 802 внутри флюидальной камеры 808, а ответчик 812 установлен на поршне 804 со смещением (на расстоянии) от приемопередатчика. Поршень 804 имеет внешнюю периферийную стенку 814, вдоль которой перемещается гибкий рукав 806, и центральную внутреннюю стенку 816. Показанная на фиг.8 внутренняя стенка является главным образом вогнутой или имеет форму тарелки и содержит внутреннюю выемку 818. Внутренняя стенка 816 имеет участок 820 боковой стенки и участок 822 нижней стенки, на котором закреплен ответчик 812. Ответчик 812 может быть закреплен на внутренней стенке 816 любым подходящим образом, например с использованием клея или механического крепежного средства. Альтернативно, ответчик 812 может быть запрессован во внутреннюю стенку 816, как показанный ответчик 812'. Следует иметь в виду, что приемопередатчиком 810 может быть любой подходящий приемопередатчик, в том числе приемопередатчики 100 и 200. Аналогично, ответчиком 812 может быть любой подходящий ответчик, в том числе ответчик 400.
Как только электромагнитная несущая CWV, переданная по радио, будет принята ответчиком 812, электрическая энергия, возбужденная вдоль и/или поперек антенны, например, такой как антенный контур 402 ответчика 400, будет по меньшей мере периодически снабжать энергией ответчик, например, как это было описано здесь ранее со ссылкой на силовую цепь 404. Альтернативно, электрическая энергия может поступать от батареи или другого подходящего источника питания. Когда ответчик 812 находится под напряжением (имеет питание), шунтирующая цепь, например, такая как шунтирующая цепь 406 ответчика 400, периодически шунтирует антенну ответчика 812, что создает модуляцию в антенне приемопередатчика 810, например, такой как антенна 104 или 204. Взаимосвязь между антеннами ответчика и приемопередатчика, которая уже обсуждалась здесь выше, только для пояснения показана в виде синусоидальных колебаний IFM на фиг.8. Одна или несколько характеристик или параметров модуляции непосредственно соответствуют или математически связаны с расстоянием между ответчиком и приемопередатчиком, как это хорошо известно специалистам в данной области. Приемопередатчик обнаруживает модуляцию и вырабатывает сигнал, указывающий расстояние между приемопередатчиком и ответчиком. Следует иметь в виду, что могут быть использованы и отличающиеся от описанных режимы работы, что не выходит за рамки предлагаемой здесь новой концепции.
Другой альтернативный вариант приемопередатчика 900 схематично показан на фиг.9. Приемопередатчик 900 содержит генератор 902 несущей, который имеет электрическую связь с антенной 904. Аналогично обсуждавшимся здесь выше генераторам 102 и 202 несущей, генератор 902 несущей выполнен с возможностью подачи электрического сигнала несущей на антенну, которая, в свою очередь, осуществляет радиопередачу соответствующей несущей CWV. Детектор 906 модуляции электрически подключен к антенне 904, как правило, напротив генератора 902 несущей. Детектор 906 модуляции аналогичен детекторам 106 и 206, которые обсуждались здесь выше, в том, что детектор 906 выполнен с возможностью обнаружения модуляции электрических характеристик или параметров вдоль или поперек антенны. Однако детектор 906 модуляции отличается от детекторов 106 и 206 в том, что детектор 906 выполнен с возможностью подачи цифрового сигнала DSG, соответствующего модуляции, вдоль или поперек антенного контура 904, а не аналогового сигнала, имеющего такие характеристики, как уровень напряжения или тока, соответствующие уровню модуляции, как в детекторах 106 и 206. Цифровой сигнал DSG поступает на соответствующее цифровое устройство, например, такое как процессор или микроконтроллер 908 цифрового сигнала, которое преобразует, декодирует и/или анализирует цифровой сигнал DSG и выдает соответствующий сигнал, указывающий расстояние между приемопередатчиком и взаимодействующим с ним ответчиком. Сигнал с выхода микроконтроллера 908 поступает в расположенные далее систему или устройство, что показано стрелкой 910.
Кроме того, на фиг, 9 показана цепь 912 электропитания, которая имеет электрическую связь с генератором 902 несущей. Следует иметь в виду, что, в других вариантах, цепь 912 электропитания может также подводить электрическую энергию к другим компонентам приемопередатчика 900. Как уже было упомянуто здесь выше со ссылкой на цепь 112 электропитания приемопередатчика 100, показанного на фиг.1, цепь 912 электропитания может иметь любую подходящую форму или конфигурацию и может быть выполнена совместно с другими компонентами приемопередатчика 900 или отдельно от них. Одним из примером подходящего приемопередатчика является приемопередатчик, выпускаемый фирмой Microchip Technologies, Inc. of Chandler, Arizona, номер изделия MCRF 200.
Один из примеров ответчика, подходящего для использования совместно с приемопередатчиком 900, показан на фиг.10 как ответчик 1000. Как правило, ответчик 1000 работает в комбинации с приемопередатчиком, таким как приемопередатчик 900, для определения расстояния между ними и выработки выходного сигнала, указывающего это расстояние, как уже было подробно описано здесь выше. Однако в предшествующих вариантах приемопередатчик, такой как приемопередатчик 100 или 200, определяет расстояние между двумя компонентами на основании амплитуды модуляции вдоль или поперек антенны. Первичной задачей взаимодействующего ответчика, такого как ответчик 400, является возбуждение или создание этой модуляции. В этом случае, работа приемопередатчика 900 и ответчика 1000 основана на предлагаемой новой концепции и с использованием обсуждавшихся здесь выше основных принципов работы других вариантов. Однако здесь ответчик 1000 определяет, по меньшей мере частично, расстояние между двумя компонентами, например, с использованием цифрового устройства обработки. При этом цифровые данные, соответствующие расстоянию, и/или другие данные, например, такие как опознавательный код или идентификационный номер, будут передаваться по меньшей мере от ответчика на приемопередатчик. Такая передача данных и/или обмен данными могут иметь любую подходящую форму, в том числе (но без ограничения) форму прямой передачи данных и передачи кодированных данных, как это обсуждается далее более подробно.
Как это показано на фиг.10-14, такое решение отличается от предыдущих вариантов по структуре и работе, как это обсуждается далее более подробно. Ответчик 1000 содержит антенну 1002, позволяющую получать электромагнитную несущую CWV, например, которая может быть передана по радио антенной 904 приемопередатчика 900. Как уже было подробно описано здесь выше, несущая CWV возбуждает электрическую энергию вдоль и/или поперек антенны 1002. Электрическая энергия передается в силовую цепь 1004 и формирователь (scaler, масштабирующее устройство) 1006, которые имеют электрическую связь с антенной. Как правило, силовая цепь накапливает по меньшей мере часть электрической энергии и периодически подает питание на один или несколько компонентов ответчика, как уже было описано здесь выше.
Формирователь 1006 служит для снижения или уменьшения одной или нескольких электрических характеристик (или параметров), например, таких как уровень напряжения или ток сигнала от антенны 1002, которые проходят через него. Формирователь 1006 преимущественно формирует сигнал от антенны 1002 для его приема и использования цифровым сигнальным процессором или микроконтроллером 1008, который имеет электрическую связь с формирователем и силовой цепью. Однако преимущественно это снижение или уменьшение электрического сигнала производят так, чтобы поддерживалась (пропорциональная) зависимость уменьшенного сигнала от исходного сигнала с антенны. При этом, микроконтроллер 1008 может быть использован для определения расстояния между связанными приемопередатчиком, например, таким как приемопередатчик 900, и ответчиком 1000. Как уже было упомянуто здесь выше, специалисты легко поймут, что одна или несколько характеристик электромагнитных колебаний изменяются в зависимости от пройденного расстояния в соответствии с хорошо известными зависимостями между ними.
Как уже было упомянуто здесь выше, силовая цепь 1004 периодически подает питание на одну или несколько схем (или компонентов) ответчика. Одним таким получающим питание от силовой цепи компонентом является микроконтроллер 1008, который определяет амплитуду или другую электрическую характеристику (или параметр) сигнала с выхода формирователя 1006. Эта амплитуда или другой параметр имеют прямую или другую математическую связь с расстоянием между приемопередатчиком и ответчиком. Таким образом, микроконтроллер может определять действительное числовое значение расстояния и затем передавать его назад в приемопередатчик. Альтернативно, микроконтроллер может просто передавать амплитуду или другую характеристику сигнала с выхода формирователя, без специфического определения действительного числового значения расстояния. В этом альтернативном примере, как только сигнал от формирователя поступает назад в приемопередатчик, его микроконтроллер может производить преобразование или вычислять действительное числовое значение расстояния.
После того как микроконтроллер 1008 получил питание и определил характеристику или параметр сигнала с выхода формирователя 1006, микроконтроллер избирательно активизирует шунтирующую цепь 1010 для передачи данных, преимущественно содержащих данные, соответствующие значению расстояния или сигналу с выхода формирователя, назад в объединенный приемопередатчик. После активизации шунтирующая цепь 1010 электрически закорачивает антенну 1002, которая, в свою очередь, возбуждает модуляцию вдоль или поперек антенны соответствующего приемопередатчика, например, такой как антенна 904 приемопередатчика 900. Взаимосвязь между антеннами приемопередатчика и ответчика была подробно рассмотрена здесь выше, и показана синусоидальными колебаниями IFM на фиг.10.
В соответствии с одним примерным вариантом, значение сигнала или значение действительного расстояния передается в виде данных от ответчика назад в приемопередатчик, за счет работы микроконтроллера 1008, избирательно возбуждающего шунтирующую цепь 1010. Передача данных от ответчика в приемопередатчик может производиться в любом виде, например в виде потока двоичных данных, прямо соответствующего значениям сигнала или расстояния. Альтернативно, цифровая связь может производиться с кодированием, чтобы свести к минимуму потери, например, вызванные помехами. Может быть использовано широкое разнообразие известных кодирующих устройств, например, с использованием частотной манипуляции (FSK) и фазовой манипуляции (PSK), которые хорошо известны специалистам в данной области. Пример несущей CWV, модулированной с использованием FSK, показан на фиг.11 и содержит несущую CWV, модулированную между состоянием HST высокой амплитуды и состоянием LST низкой амплитуды. Модуляция может быть использована для передачи данных любым подходящим образом, например, с использованием сдвига FS1 8 периодов, соответствующего нулевому (0) значению, и сдвига FS2 10 периодов, соответствующего единичному (1) значению. Указанным образом поток двоичных данных может быть передан от ответчика к приемопередатчику. Пример несущей CWV, модулированной с использованием PSK, показан на фиг.12 и также содержит несущую CWV, модулированную между состояниями HST и LST. Как это показано на фиг.12, частота сдвига несущей остается постоянной, например, в одном периоде при HST, в следующем периоде при LST, в последующем периоде при HST и т.д. Однако для передачи данных может быть использован фазовый сдвиг, так что два периода протекают в одном и том же состоянии. В соответствии с одним примером, каждый фазовый сдвиг PST отображает нуль (0) в потоке двоичных данных. В другом примере, каждый фазовый сдвиг PST отображает изменение данных (от 0 к 1 или от 1 к 0). Однако следует иметь в виду, что могут быть использованы и другие подходящие виды модуляции и/или технологии передачи данных.
Принципиальная электрическая схема 1100 одного из вариантов ответчика 1000 показана на фиг.13. Схема содержит антенный контур 1102, силовую цепь 1104, формирователь 1106, микроконтроллер 1108 и шунтирующую цепь 1110. Обычно антенный контур 1102 соответствует антенне 1002, показанной на фиг.10. Аналогично, силовая цепь 1104 соответствует цепи 1004, формирователь 1106 соответствует формирователю 1006, микроконтроллер 1108 соответствует микроконтроллеру 1008 и шунтирующая цепь 1110 соответствует шунтирующей цепи 1010.
Как уже было упомянуто здесь выше, специалисты легко поймут, что схема 1100 содержит множество традиционных электрических компонентов, в том числе (но без ограничения) резисторы, конденсаторы, диоды, дроссели, транзисторы и другие хорошо известные компоненты. Следует иметь в виду, что эти компоненты имеют главным образом стандартную конструкцию, если специально не оговорено иное, и легко могут быть приобретены. Кроме того, схема 1100 может быть выполнена в виде интегральной схемы на одной подложке, например, такой как кремниевая пластина, или, альтернативно, может быть собрана из дискретных компонентов с использованием любой подходящей технологии изготовления. Кроме того, различные участки схемы 1100 подключены к общей земле, которая показана контактным зажимом 1112, изображенным в виде стрелки.
Антенный контур 1102 содержит дроссель 1114 и конденсатор 1116, включенные в параллель между проводами 1118 и 1120. Показанный в виде стрелки контактный зажим 1112 подключен к проводу 1120 рядом с дросселем, который показан на фиг.13 при помощи стандартного символа. Однако следует иметь в виду, что может быть желательна подстройка или оптимизация антенны, которую проводят для улучшения взаимодействия с другой антенной, например, с такой как антенна 904 приемопередатчика 900. В таком случае может быть использован дроссель специфической конструкции, который представляет собой обмотку из провода, которая имеет, например, квадратную форму, кольцевую форму или форму петли.
Силовая цепь 1104 подключена к антенному контуру 1102 при помощи проводов 1118 и 1120. Диод 1122 и резистор 1124 включены последовательно в провод 1118. Транзистор 1126 и конденсатор 1128 включены параллельно между проводами 1118 и 1120. Коллекторный вывод 1126 с транзистора 1126 подключен к точке соединения конденсатора 1128 с резистором 1124, а эмиттерный вывод 1126с транзистора 1126 подключен к проводу 1120. Провод 1130 соединяет базовый вывод 1126b транзистора 1126 через диод 1132 с точкой соединения конденсатора 1128 с резистором 1124. В соответствии с одним примерным вариантом, диод 1122 представляет собой диод Шотки, а транзистор 1126 представляет собой стандартный n-р-n транзистор, которые хорошо известны специалистам в данной области.
Микроконтроллер 1108 подключен к силовой цепи 1104 при помощи провода 1134, который соединен с точкой соединения конденсатора 1128 с резистором 1124 вблизи от коллекторного вывода 1126с. Кроме того, микроконтроллер 1108 имеет электрическую связь с проводом 1120 через формирователь 1106, при помощи провода 1136. Микроконтроллер 1108 может иметь любую подходящую форму или конфигурацию. Одним из примеров подходящего микроконтроллера является микроконтроллер, выпускаемый фирмой Freescale Semiconductor, Inc. of Austin, Texas, номер изделия 68HC05L25. Этот микроконтроллер содержит процессор, память и тактовый генератор. Формирователь 1106 также может иметь любую подходящую форму или конфигурацию.
Шунтирующая цепь 1110 содержит реле 1138, включенное между проводами 1118 и 1120 антенного контура 1102, и соединенное проводом 1140 с микроконтроллером 1108. Следует иметь в виду, что вместо реле 1138 может быть использовано устройство переключения любого подходящего типа, например, такое как полевой транзистор (ПТ).
Другой примерный вариант схемы 1200 последовательности операций способа показан на фиг.14 и содержит операцию 1202 использования приемопередатчика и ответчика, например, таких как приемопередатчик 900 и ответчик 1000, которые установлены на расстоянии друг от друга. Другая операция 1204 предусматривает радиопередачу электромагнитной несущей от антенны приемопередатчика к антенне ответчика. Следующая операция 1206 предусматривает прием несущей при помощи антенны ответчика. Факультативная операция 1208 предусматривает накопление электрической энергии, возбужденной вдоль и/или поперек антенны ответчика.
Другая операция 1210 способа 1200 предусматривает уменьшение электрического сигнала от антенны ответчика до величины, подходящей для использования в процессоре или микроконтроллере. Еще одна операция 1212 предусматривает определение расстояния или числового значения, соответствующего расстоянию, на основании уменьшенного электрического сигнала. Дополнительная операция 1214 предусматривает формирование данных, соответствующих расстоянию или числовому значению, соответствующему расстоянию. Факультативная операция 1216 предусматривает кодирование сформированных данных. Еще одна операция 1218 предусматривает избирательное шунтирование антенны ответчика для модулирования антенны приемопередатчика, чтобы произвести передачу данных. Другая операция 1220 предусматривает обнаружение модуляции антенны приемопередатчика. Еще одна операция 1222 предусматривает вывод данных, соответствующих обнаруженной модуляции. Дальнейшая факультативная операция 1224 предусматривает декодирование данных при взаимодействии с факультативной операцией 1216 кодирования. Еще одна операция 1226 предусматривает вывод данных (или другого цифрового сигнала), указывающих расстояние.
На фиг.15 схематично показан примерный вариант системы 1300 определения ориентации и обмена информацией в соответствии с предлагаемой новой концепцией, которая содержит приемопередатчик 1302, используемый совместно с ответчиком 1304. Приемопередатчик и ответчик расположены на некотором расстоянии друг от друга, как это показано расстоянием DST. Приемопередатчик 1302 главным образом аналогичен приемопередатчику 900, который показан на фиг.9 и обсуждался здесь выше, и содержит генератор 1306 несущей, который имеет электрическую связь с антенной 1308. Генератор 1306 несущей выполнен с возможностью подачи выходного электрического сигнала несущей на антенну 1308, которая, в свою очередь, может передавать по радио соответствующую несущую CWV. Детектор 1310 модуляции электрически подключен к антенне 1308, как правило, напротив генератора 1306 несущей. Детектор 1310 модуляции выполнен с возможностью выработки цифрового сигнала DSG, соответствующего модуляции вдоль или поперек антенны 1308. Цифровой сигнал DSG поступает в соответствующее цифровое устройство, например, такое как процессор цифрового сигнала или микроконтроллер 1312, которое преобразует, декодирует и/или анализирует цифровой сигнал DSG и выдает соответствующий сигнал на расположенные далее систему или устройство, как это показано стрелкой 1314. В качестве примера подходящего приемопередатчика можно привести приемопередатчик типа MCRF 200, который может быть закуплен на фирме Microchip Technologies, Inc., of Chandler, Arizona.
Кроме того, на фиг.15 показана цепь 1316 электропитания, имеющая электрическую связь с генератором 1306 несущей. Как уже было упомянуто здесь выше, например, со ссылкой на цепь 112 электропитания приемопередатчика 100, показанную на фиг.1, цепь 1316 электропитания может иметь любую подходящую форму или конфигурацию и может быть выполнена совместно с другими компонентами приемопередатчика 1302 или отдельно от них.
Ответчик 1304 на фиг.15 показан при работе вместе приемопередатчиком 1302, когда он принимает несущую CWV от него, как уже было упомянуто здесь выше при описании других вариантов. Ответчик 1304 отличается от других обсуждавшихся здесь ранее ответчиков тем, что имеется датчик 1318, оперативно взаимодействующий с ответчиком, который модулирует несущую CWV, что показано в общем виде синусоидальными колебаниями IFM и подробно обсуждалось здесь ранее. Ответчик 1304 может модулировать несущую CWV в зависимости от расстояния DST, что также подробно обсуждалось здесь ранее, например, со ссылкой на ответчик 1000, показанный на фиг.10. Дополнительно или альтернативно, ответчик 1304 может модулировать несущую в зависимости от выходного сигнала датчика 1318, как это дополнительно обсуждается далее более подробно, причем следует иметь в виду, что ответчик 1304 может модулировать несущую CWV в зависимости от расстояния DST, выходного сигнала одного или нескольких датчиков, например, таких как датчик 1318, или в зависимости от комбинации расстояния и выходных сигналов датчиков, если это желательно. Кроме того, модуляцию несущей в зависимости от расстояния DST и/или выходного сигнала датчика можно осуществлять на любой подходящей рабочей частоте или в течение любого подходящего промежутка времени, в течение постоянных или прерывистых рабочих интервалов.
Альтернативный вариант приемопередатчика 1302' показан на фиг.16, причем этот приемопередатчик является аналогичным приемопередатчику 1302, показанному на фиг.15. При этом аналогичные или идентичные элементы на различных чертежах имеют одинаковые позиционные обозначения, а новые или модифицированные элементы имеют позиционные обозначения со штрихом (').
Приемопередатчик 1302' содержит генератор 1306 несущей, который имеет связь с антенной 1308, чтобы передавать по радио несущую CWV. Детектор 1310 модуляции имеет связь с антенной 1308 напротив генератора 1306 и выдает цифровой сигнал DSG в микроконтроллер 1312'. Цепь 1316' электропитания имеет связь с генератором 1306 несущей. Кроме того, датчик 1320' приемопередатчика имеет связь с цепью 1316' электропитания и с микроконтроллером 1312'. Как таковой, датчик 1320' получает электрическую энергию от цепи 1316' электропитания и выдает сигнал TSS на микроконтроллер 1312'. Микроконтроллер получает сигналы TSS и DSG и осуществляет одну или несколько операций с использованием этих сигналов. После этого микроконтроллер 1312' взаимодействует с расположенными далее системами и/или устройствами, как это показано в общем виде стрелкой 1314.
Ответчик 1304 схематично показан на фиг.17 и содержит антенну 1322, подходящую для приема несущей CWV. Силовая цепь 1324 имеет связь с антенной 1322 и позволяет накапливать электрическую энергию от нее, как уже было упомянуто здесь выше со ссылкой на другие варианты. Микроконтроллер 1326 имеет связь с силовой цепью 1324 и получает электрическую энергию от нее. Формирователь 1328 имеет связь с антенной 1322 и с микроконтроллером 1326 и вырабатывает выходной сигнал SCL, который содержит одну или несколько масштабированных электрических характеристик или параметров, например, таких как уровень напряжения или тока сигнала от антенны 1322.
Датчик 1318 имеет связь с силовой цепью 1324 и с микроконтроллером 1326. Датчик получает электрическую энергию от силовой цепи 1324 и выдает выходной сигнал SNR на микроконтроллер 1326. Как таковой, датчик 1318 получает электрическую энергию от силовой цепи 1324 без использования других внешних проводов, подающих на него электрическую энергию. Получающий питание без проводов датчик генерирует выходной сигнал SNR, который передается на микроконтроллер 1326. При необходимости могут быть использованы один или несколько дополнительных датчиков 1330, оперативно объединенных с ответчиком 1304, которые, в соответствии с одним примерным вариантом, могут получать питание от силовой цепи 1324 и передавать соответствующие выходные сигналы датчика SNR2-SNRN на микроконтроллер 1326, аналогично датчику 1318.
Датчик 1318 и датчики 1330, если они есть, могут быть любого подходящего типа, вида, конфигурации и/или конструкции и создают выходной сигнал, несущий информацию о измеренном параметре. В качестве примеров датчиков можно привести (но без ограничения) акселерометры, реле давления и датчики температуры или термопары. Следует иметь в виду, что специалисты в данной области могут выбрать любые подходящие датчики и оперативно соединить их с соответствующим преобразователем. При выборе соответствующего количества и схемы расположения датчиков и при выборе специфических датчиков для использования, следует учитывать количество электрической энергии, генерируемой преобразователем и необходимой для работы его электрических компонентов, причем желательно получать электрическую энергию от одного или нескольких источников энергии без проводов.
Шунтирующая цепь 1332 имеет электрическую связь с микроконтроллером 1326 и антенной 1322. Шунтирующая цепь 1332 позволяет изменять индуктивность антенны 1322 за счет ее избирательной активации при помощи микроконтроллера 1326. За счет избирательной активации шунтирующей цепи 1332 и создания соответствующих изменений в индуктивности антенны 1322 может быть возбуждена модуляция несущей CWV, как это показано синусоидальными колебаниями IM2. В соответствии с примерным вариантом, микроконтроллер 1326 избирательно активирует шунтирующую цепь 1332 для возбуждения модуляции несущей CWV при схеме, подходящей для передачи данных в соответствующий приемопередатчик, например, такой как приемопередатчик 1302. Может быть использована схема любого подходящего типа или вида, которая может иметь любую подходящую форму или конфигурацию, в том числе это может быть прямая передача или кодированная передача, такая как частотная манипуляция и фазовая манипуляция, которые обсуждались здесь выше. Данные, получаемые за счет избирательной активации шунтирующей цепи 1332, вырабатываются микроконтроллером 1326 в ответ на выходной сигнал SCL формирователя и, дополнительно или альтернативно, за счет выходного сигнала SNR датчика. При необходимости, дополнительные выходные сигналы SNR2-SNRN датчиков могут быть введены в процесс генерации данных, если такие дополнительные датчики оперативно взаимодействуют с ответчиком.
Более того, следует четко понимать, что данные могут быть получены и/или переданы в любом подходящем виде или любым подходящим образом, причем приведенные далее примеры просто поясняют подходящую операцию определения ориентации и обмена информацией, и что альтернативно может быть использован любой другой подходящий способ получения и/или передачи данных. Например, каждый сигнал (например, выходной сигнал SCL формирователя и выходные сигналы SNR2 - SNRN датчиков) может быть преобразован в индивидуальное сообщение, имеющее заданное число бит или байтов, причем каждое сообщение содержит идентификатор источника сигнала и соответствующее значение сигнала. Данные от каждого датчика могут быть получены и переданы с высокой или низкой частотой. Например, данные ускорения могут быть получены и переданы ориентировочно 1000 раз в секунду, данные относительно высоты могут быть получены и переданы ориентировочно 100 раз в секунду, а данные относительно давления или температуры могут быть получены и переданы ориентировочно 1 раз в минуту.
В соответствии с другим примером, могут быть созданы сообщения, имеющие заданное число бит или байтов, которые содержат заданное число бит или байтов для каждого выходного сигнала. Например, в случае ответчика, имеющего датчик ускорения и датчик давления, сообщение может иметь всего восемь (8) бит, причем первые три (3) бита соответствуют данным расстояния, следующие три (3) бита соответствуют данным ускорения, а остальные два (2) бита соответствуют данным давления. Сообщение может быть создано и послано на частоте, которая необходима для данных самого высокого выходного сигнала, при этом данные других выходных сигналов игнорируют или удаляют иным образом, если и/или когда такие данные не используют.
Принципиальная электрическая схема 1400 варианта ответчика 1304 показана на фиг.18 и содержит антенный контур 1402, силовую цепь 1404, формирователь 1406, микроконтроллер 1408 и шунтирующую цепь 1410. Как правило, антенный контур 1402 соответствует антенне 1322, показанной на фиг.17. Аналогично, силовая цепь 1404 соответствует силовой цепи 1324, формирователь 1406 соответствует формирователю 1328, микроконтроллер 1408 соответствует микроконтроллеру 1326 и шунтирующая цепь 1410 соответствует шунтирующей цепи 1332. Дополнительно, схема 1400 содержит датчик 1412, который в целом соответствует датчику 1318 на фиг.17. Следует иметь в виду, что могут быть использованы в любом количестве дополнительные датчики любого подходящего вида и/или типа, которые в целом соответствуют датчикам 1330 на фиг.17.
Как уже было упомянуто здесь выше, специалисты легко поймут, что схема 1400 содержит различные традиционные электрические компоненты, в том числе (но без ограничения) резисторы, конденсаторы, дроссели, транзисторы и/или другие хорошо известные компоненты. Следует иметь в виду, что эти компоненты имеют главным образом стандартную конструкцию, если специально не оговорено иное. Кроме того, схема 1400 может быть выполнена в виде интегральной схемы на одной подложке, например, такой как кремниевая пластина, или, альтернативно, может быть собрана из дискретных компонентов с использованием любой подходящей технологии изготовления. Кроме того, различные участки схемы 1400 подключены к общей земле, которая показана контактным зажимом 1414, изображенным в виде стрелки.
Антенный контур 1402 содержит дроссель 1416 и конденсатор 1418, установленные в параллель между проводами 1420 и 1422. Показанный в виде стрелки контактный зажим 1414 соединен с проводом 1422 рядом с дросселем, который показан на фиг.18 при помощи стандартного символа. Однако следует иметь в виду, что может быть желательна подстройка или оптимизация антенны, чтобы она могла взаимодействовать с другой антенной, например, такой как антенна 1308 приемопередатчика 1302. В таком случае, дроссель 1416 может иметь специфическую форму или конструкцию, например, такую как виток провода, имеющий квадратную или круговую форму или форму петли.
Силовая цепь 1404 соединена с антенным контуром 1402 при помощи проводов 1420 и 1422. Диод 1424 и резистор 1426 включены последовательно с проводом 1420. Транзистор 1428 и конденсатор 1430 включены в параллель между проводами 1420 и 1422. Коллекторный вывод 1428 с транзистора 1428 соединен с проводом 1420, а эмиттерный вывод 1428е транзистора 1428 соединен с проводом 1422. Провод 1432 соединяет базовый вывод 1428b транзистора 1428 с проводом 1420 через диод 1434. В соответствии с примерным вариантом, диод 1424 представляет собой диод Шотки, а транзистор 1428 представляет собой стандартный n-р-n транзистор, которые хорошо известны специалистам в данной области.
Микроконтроллер 1408 соединен с силовой цепью 1404 при помощи провода 1436, который соединен с проводом 1420 между резистором 1426 и конденсатором 1430, поблизости от коллекторного вывода 1428с. Кроме того, микроконтроллер 1408 имеет электрическую связь с проводом 1420 при помощи провода 1438 через формирователь 1406. Может быть использован микроконтроллер 1408 любого подходящего типа или конфигурации. В качестве примера подходящего микроконтроллера можно привести микроконтроллер типа 68HC05L25, выпускаемый фирмой Freescale Semiconductor, Inc., of Austin, Texas. Этот микроконтроллер содержит процессор, память и тактовый генератор. Альтернативно, может быть использован формирователь 1406 любого подходящего типа или конфигурации.
Шунтирующая цепь 1410 содержит реле 1440, подключенное между проводами 1420 и 1422 антенного контура 1402 и проводом 1442, который имеет электрическую связь с микроконтроллером 1408. Следует иметь в виду, что вместо реле 1440 может быть использовано любое подходящее устройство коммутации, например, такое как полевой транзистор (ПТ).
Датчик 1412 оперативно взаимодействует с ответчиком 1400 и, в соответствии с одним примерным вариантом, выполнен в виде единого целого с ним. Однако следует четко понимать, что описанные здесь датчики, в том числе (но без ограничения) датчики 1318, 1320', 1330 и 1412 любого подходящего вида, могут быть сконструированы, конфигурированы или установлены любым подходящим образом на взаимодействующем ответчике или как отдельный компонент, установленный или закрепленный иным образом поблизости от него, что не выходит за рамки предлагаемой новой концепции и соответствует ее принципам. Датчик 1412 получает электрическую энергию от силовой цепи 1404 и соединен с ней при помощи проводов 1444 и 1446. В варианте, показанном на фиг.18, провод 1444 соединен с проводом 1420 силовой цепи 1404, а провод 1446 соединен с проводом 1422. Датчик 1412 выполнен с возможностью подачи соответствующего сигнала в микропроцессор 1408 по проводу 1448. Следует иметь в виду, что датчик 1412 показан на фиг.18 как относительно простой датчик, имеющий два провода питания датчика и один провод для выдачи сигнала датчика. Однако следует иметь в виду, что может быть использован датчик любого подходящего вида, типа или конфигурации, что не выходит за рамки предлагаемой новой концепции и соответствует ее принципам, причем при необходимости может быть использовано большее или меньшее число проводов и/или других соединений.
Один примерный вариант способа 1500 функционирования системы определения ориентации и обмена информацией в соответствии с предлагаемой новой концепцией, например, такой как система 1300, показан на фиг.19 и содержит операцию 1502 использования приемопередатчика, который позволяет передавать по радио электромагнитную несущую, ответчика, который позволяет принимать и модулировать электромагнитную несущую, и датчика, который имеет связь с ответчиком. В соответствии с примерным вариантом, такие компоненты содержат, например, приемопередатчик 1302, ответчик 1304 и датчик 1318. Другая операция 1504 предусматривает передачу по радио электромагнитной несущей, например, при помощи антенны 1308 приемопередатчика 1302 в направлении антенны 1322 ответчика 1304. Еще одна операция 1506 предусматривает прием электромагнитной несущей при помощи антенны ответчика, например, при помощи антенны 1322 ответчика 1304. Возможная операция 1508 предусматривает накопление электрической энергии, генерируемой на антенне ответчика. Такая операция может быть осуществлена при помощи силовой цепи, например, такой как силовая цепь 1324. Операция 1508 является однако факультативной, так как имеется возможность использования других источников электрический энергии, таких как батареи или другие источники питания, чтобы подавать электрическую энергию на компоненты ответчика и/или датчика.
Способ 1500 также содержит операцию 1510 масштабирования (уменьшения) электрического сигнала от антенны ответчика до величины, подходящей для использования в процессоре или микроконтроллере. В соответствии с примерным вариантом, такая операция может быть осуществлена при помощи формирователя 1328. Возможная операция 1512 предусматривает определение расстояния на основании масштабированного электрического сигнала. Другая возможная операция 1514 предусматривает получение данных от датчика, соответствующих входному воздействию на датчик. В одном примерном варианте способа 1500 используют обе операции 1512 и 1514. Однако следует иметь в виду, что в других вариантах может быть использована только одна из этих операций. Дальнейшая операция 1516 предусматривает генерирование данных, соответствующих по меньшей мере расстоянию или данным от датчика. Возможная операция 1518 предусматривает кодирование полученных данных. Еще одна операция 1520 предусматривает избирательное шунтирование антенны ответчика, чтобы модулировать антенну приемопередатчика и передавать данные. В соответствии с примерным вариантом, каждая из операций 1514 и 1516, если осуществляют одну из них или обе, может быть осуществлена при помощи микроконтроллера, например, такого как микроконтроллер 1326, в сочетании с формирователем 1328 и любыми датчиками (например, датчиками 1318 и 1330). В таком примерном варианте операция 1518 может быть осуществлена при помощи микроконтроллера, а операция 1520 может быть осуществлена при помощи микроконтроллера в сочетании с шунтирующей цепью, например, такой как шунтирующая цепь 1332. Другая операция 1522 предусматривает обнаружение модуляции вдоль или поперек антенны приемопередатчика. Еще одна операция 1524 предусматривает выдачу данных, соответствующих обнаруженной модуляции. В соответствии с примерным вариантом, операции 1522 и 1524 могут быть осуществлены при помощи детектора модуляции, например, такого как детектор 1310 модуляции. Дальнейшая возможная операция 1526 предусматривает декодирование данных, в случае использования возможной операции 1518 кодирования. Еще одна операция 1528 предусматривает выдачу данных или других цифровых сигналов, которые несут информацию о расстоянии и/или содержат данные с датчика. В соответствии с примерным вариантом, операции 1526 и 1528 могут быть осуществлены при помощи микроконтроллера, например, такого как микроконтроллер 1312.
На фиг.20 показан другой примерный вариант способа 1600 функционирования в соответствии с предлагаемой новой концепцией. Способ 1600 является аналогичным способу 1500, подробно описанному здесь выше со ссылкой на фиг.19, и содержит некоторые операции, которые главным образом идентичны операциям способа 1500. Однако другие операции способа 1600 отличаются от операций способа 1500 и обсуждаются далее более подробно. Способ 1600 содержит операцию 1602 использования приемопередатчика, ответчика и датчика, например, таких как приемопередатчик 1302, ответчик 1304 и датчик 1318. Другая операция 1604 предусматривает передачу по радио электромагнитной несущей, например, от антенны приемопередатчика в направлении антенны ответчика. Еще одна операция 1606 предусматривает прием электромагнитной несущей при помощи антенны ответчика. Возможная операция 1608 предусматривает накопление электрической энергии, генерированной вдоль и/или поперек антенны ответчика. Дальнейшая операция 1610 предусматривает масштабирование электрического сигнала от антенны ответчика до амплитуды, подходящей для использования в процессоре или микроконтроллере.
Способ 1600 отличается от способа 1500 тем, что каждый повтор операций способа может избирательно содержать одну или обе операции определения расстояния и получения данных при помощи датчика. Операции 1512 и 1514 способа 1500, которые хотя и показаны как возможные, в соответствии с первым примерным вариантом могут повторяться всякий раз в операциях способа, показанных на фиг.19. Способ 1600 в операции 1612 принятия решения содержит запрос относительно необходимости определения расстояния. В случае положительного (ДА) ответа, осуществляют операцию 1614 определения расстояния. В случае отрицательного (НЕТ) ответа, способ 1600 переходит к операции 1616, которая содержит запрос относительно необходимости получения данных с датчика. В случае положительного (ДА) ответа, осуществляют операцию 1618 получения данных с датчика. Следует иметь в виду, что каждая или обе операции 1616 и 1618 могут быть повторены необходимое число раз, особенно когда имеется множество датчиков. Кроме того, следует иметь в виду, что принятие решения в операциях 1612 и 1616 может быть основано на любых подходящих критериях принятия решения, например, на таких как логические функции и/или временные функции. В соответствии с примерным вариантом, операции 1612 и 1616 принятия решения проводят в течение заданных интервалов или с заданными частотами. Однако следует иметь в виду, что дополнительно или альтернативно могут быть использованы любые другие подходящие критерии.
После осуществления операции 1618 или получения отрицательного ответа в операции 1616 осуществляют другую операцию 1620, которая предусматривает выработку данных, соответствующих одному или нескольким значениям операций 1614 и 1618. Возможная операция 1622 предусматривает кодирование данных, полученных в операции 1620. Дополнительная операция 1624 предусматривает избирательное шунтирование антенны ответчика, чтобы модулировать антенну приемопередатчика для передачи данных.
Другая операция 1626 предусматривает обнаружение модуляции антенны приемопередатчика. Еще одна операция 1628 предусматривает выдачу данных, соответствующих обнаруженной модуляции. Дополнительная возможная операция 1630 предусматривает декодирование данных, если применяли возможную операцию 1622 кодирования. Еще одна операция 1632 предусматривает выдачу данных или других цифровых сигналов, которые несут информацию относительно определенного расстояния или полученных данных с датчика.
Предусмотрена система связи в соответствии с предлагаемой новой концепцией, которая адаптирована к системе подвески транспортного средства, имеющей первый компонент транспортного средства и второй компонент транспортного средства и претерпевающей входное воздействие на подвеску, причем указанная система связи содержит: приемопередатчик, закрепленный на указанном первом компоненте транспортного средства, способный передавать по радио электромагнитное колебание, ответчик, закрепленный на указанном втором компоненте транспортного средства на расстоянии от указанного приемопередатчика и имеющий связь с ним, и датчик, закрепленный на указанном втором компоненте транспортного средства и способный воспринимать указанное входное воздействие от подвески, причем указанный датчик имеет связь с указанным ответчиком и может вырабатывать выходной сигнал датчика, соответствующий указанному входному воздействию (сигналу), при этом указанный ответчик может принимать указанный выходной сигнал от указанного датчика и создавать модуляцию указанного электромагнитного колебания в зависимости от указанного сигнала.
Предлагается также система связи в соответствии с предыдущим параграфом, в которой указанный ответчик может создавать указанную модуляцию указанного электромагнитного колебания в зависимости от указанного расстояния указанного ответчика от указанного приемопередатчика, в дополнение к указанному выходному сигналу датчика.
Предлагается также система связи в соответствии с любым из двух предыдущих параграфов, в которой указанный ответчик содержит антенну, получающую указанное электромагнитное колебание, и силовую цепь, которая имеет связь с указанной антенной и может передавать электрическую энергию, причем указанный датчик имеет связь с указанной силовой цепью для получения от нее электрической энергии.
Предлагается также система связи в соответствии с предыдущим параграфом, в которой указанный приемопередатчик содержит антенну, чтобы передавать по радио указанное электромагнитное колебание, причем указанный приемопередатчик и указанный ответчик имеют магнитную индуктивную связь через указанные антенны.
Предлагается также система связи в соответствии с любым из двух предыдущих параграфов, в которой указанный ответчик содержит процессор, который имеет связь с указанным датчиком, причем указанный процессор принимает указанный выходной сигнал от указанного датчика.
Предлагается также система связи в соответствии с предыдущим параграфом, в которой указанный процессор имеет связь с указанной силовой цепью, чтобы получать электрическую энергию от нее.
Предлагается также система связи в соответствии с любым из двух предыдущих параграфов, в которой указанный ответчик содержит шунтирующую цепь, которая имеет связь с указанным процессором и указанной антенной, причем указанная шунтирующая цепь может модулировать указанное электромагнитное колебание, при этом указанный процессор избирательно подает питание на указанную шунтирующую цепь, чтобы создавать указанную модуляцию указанного электромагнитного колебания.
Предлагается также система связи в соответствии с предыдущим параграфом, в которой указанный приемопередатчик содержит антенну и детектор модуляции, который имеет связь с указанной антенной, причем указанная антенна указанного приемопередатчика принимает указанное модулированное электромагнитное колебание, а указанный детектор модуляции может вырабатывать выходной сигнал, соответствующий указанной модуляции.
Предлагается также система связи в соответствии с предыдущим параграфом, в которой указанный приемопередатчик содержит процессор, который имеет связь с указанным детектором модуляции и может получать указанный выходной сигнал детектора.
Несмотря на то, что были описаны предпочтительные варианты осуществления изобретения и существенное внимание было обращено на структуры и структурные связи между компонентами описанных вариантов, следует иметь в виду, что возможны и другие варианты настоящего изобретения, причем совершенно ясно, что в него специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят за рамки формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ | 2005 |
|
RU2397508C2 |
| УЗЕЛ ПНЕВМАТИЧЕСКОЙ РЕССОРЫ С ОПЕРАЦИОННЫМ МОДУЛЕМ | 2006 |
|
RU2378131C2 |
| СИСТЕМА И СПОСОБ ИНДИКАЦИИ РАССТОЯНИЯ | 2007 |
|
RU2407655C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2023 |
|
RU2801741C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ГОМОДИННЫМ ПРИЕМОПЕРЕДАТЧИКОМ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2024 |
|
RU2829602C1 |
| СПОСОБ И УСТРОЙСТВО СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786729C1 |
| СПОСОБ СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2789416C1 |
| УСОВЕРШЕНСТВОВАННАЯ СИСТЕМА СВЯЗИ БУРИЛЬНОЙ КОЛОННЫ, КОМПОНЕНТЫ И СПОСОБЫ | 2013 |
|
RU2605105C2 |
| Способ и система определения скорости локомотива и направления движения | 2023 |
|
RU2808863C1 |
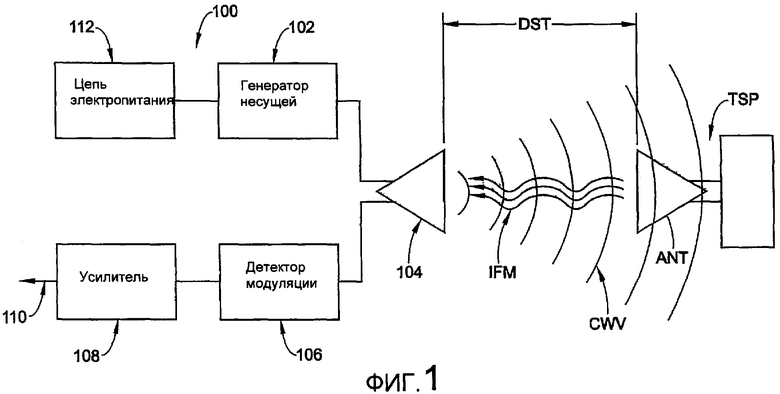
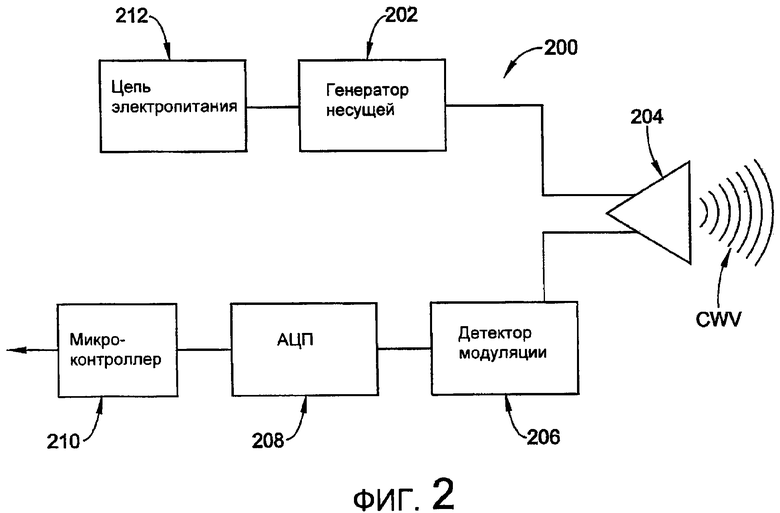
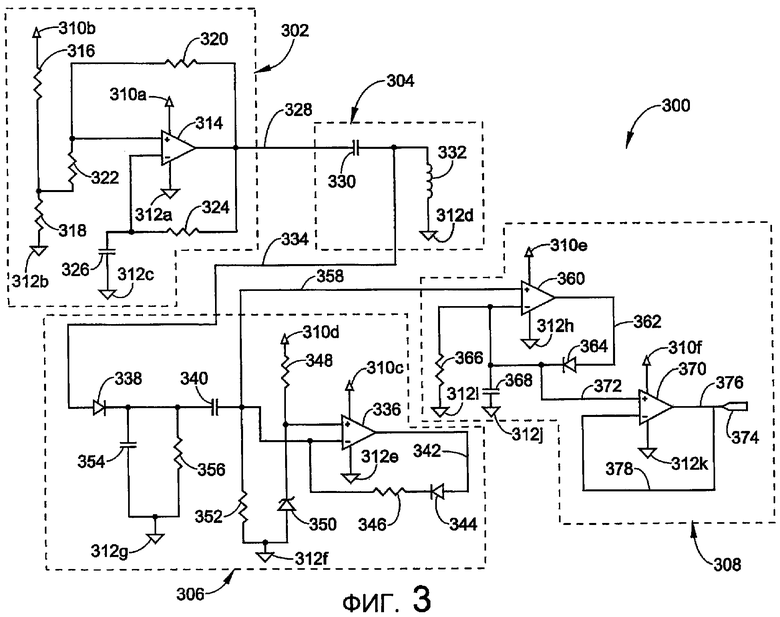
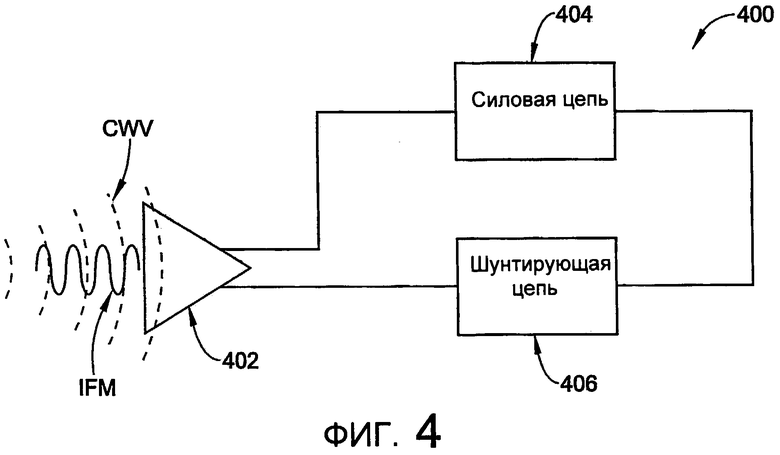
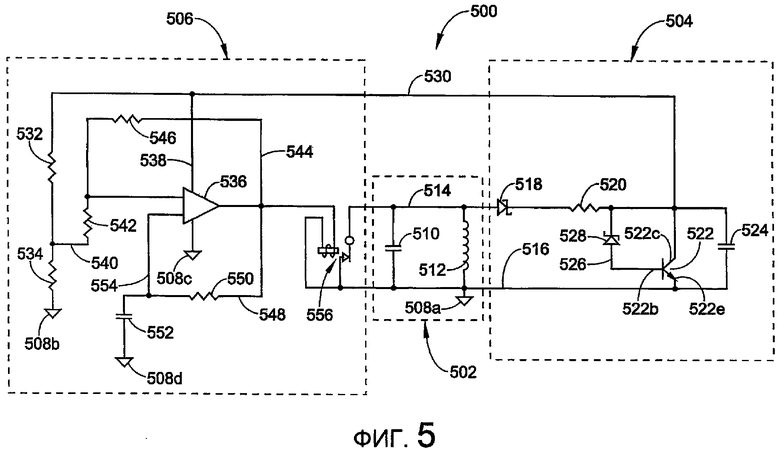
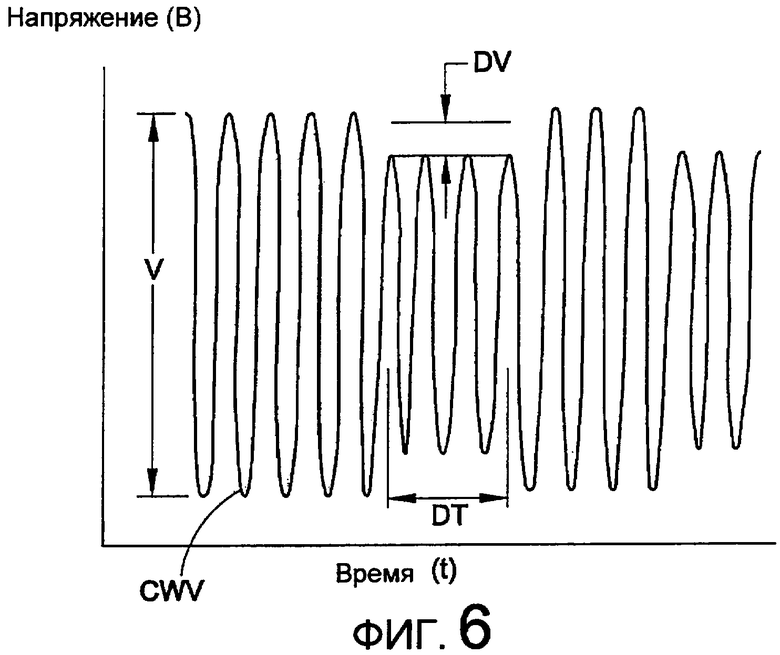
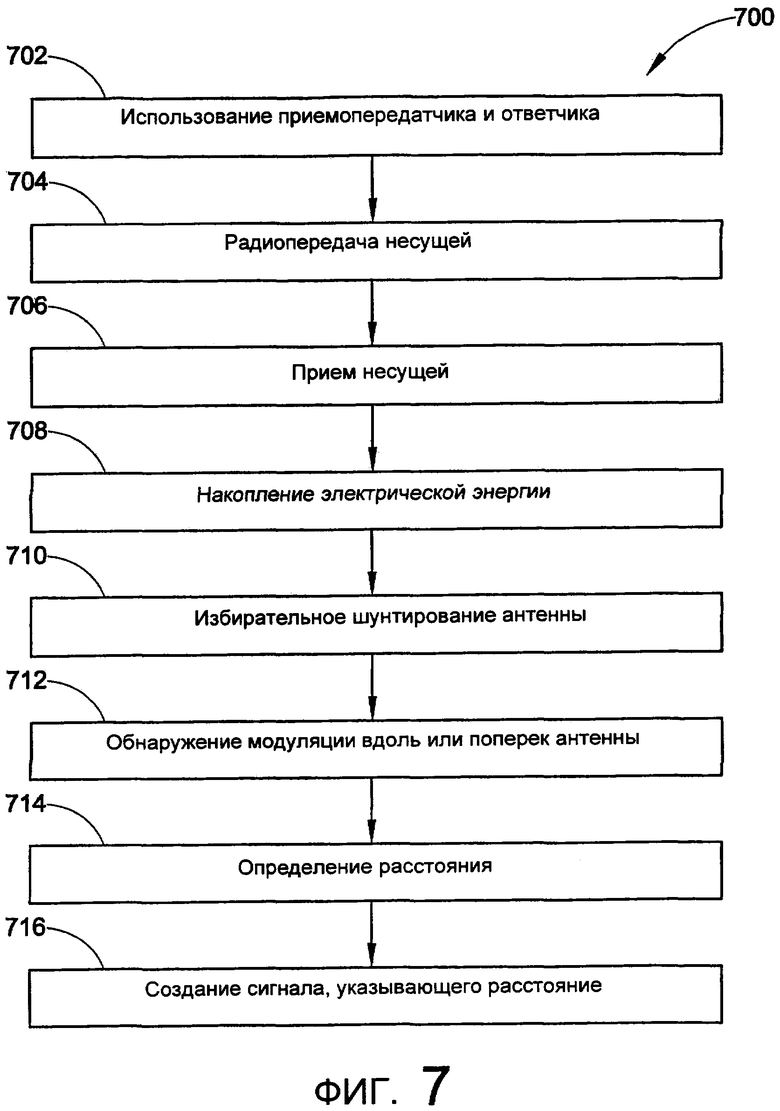
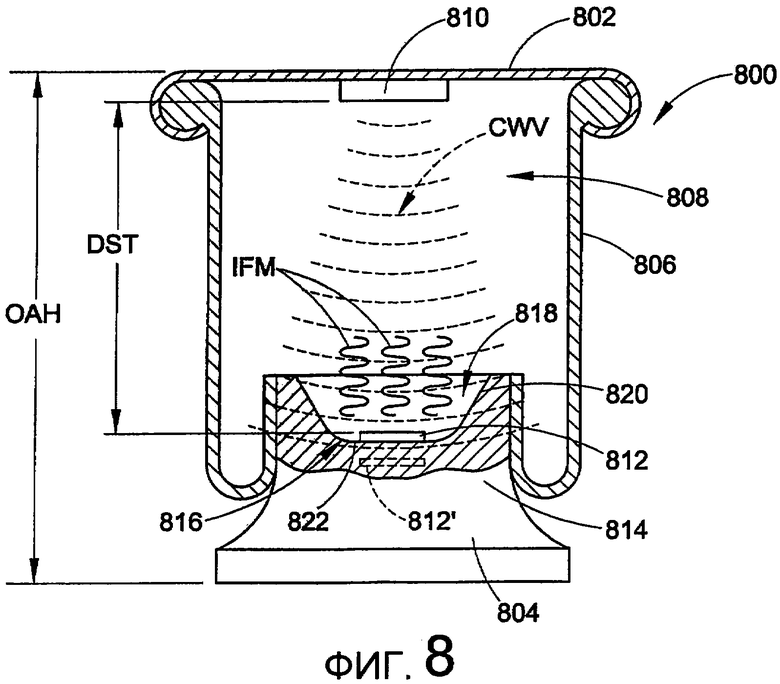
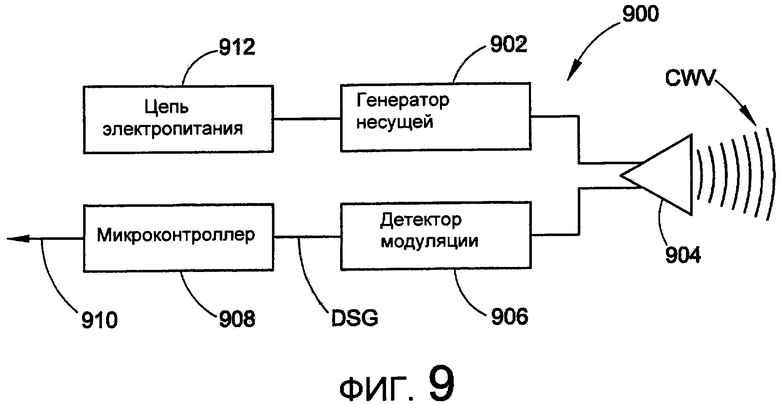
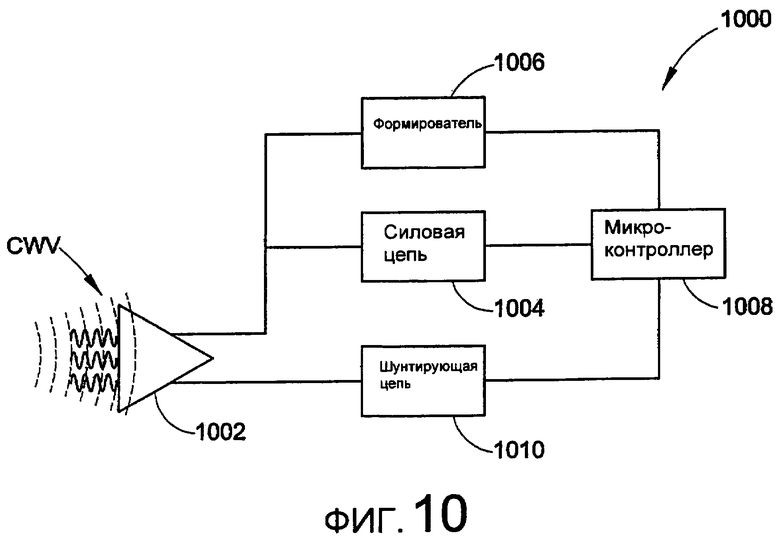
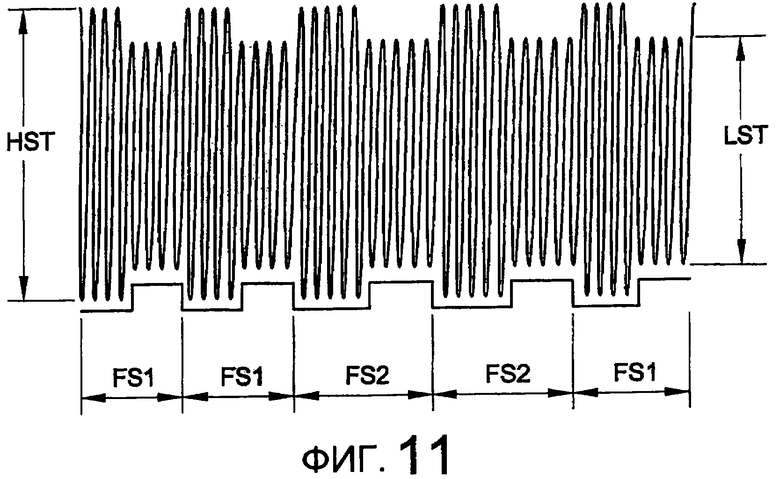
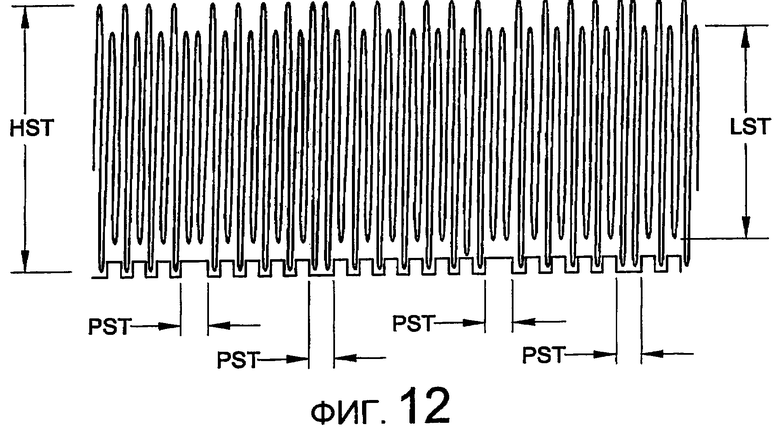
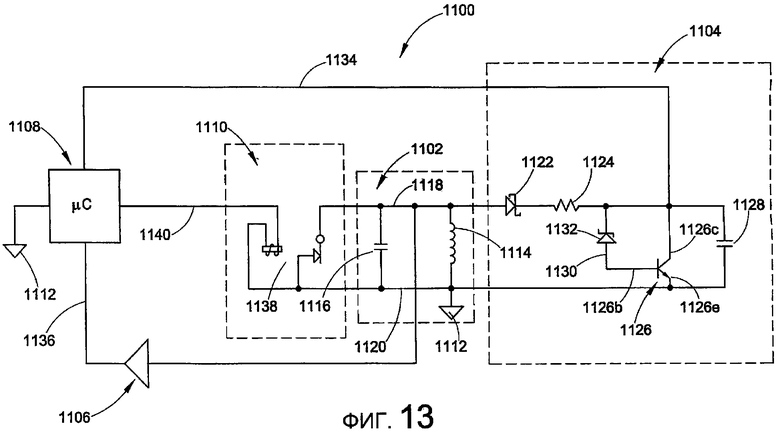
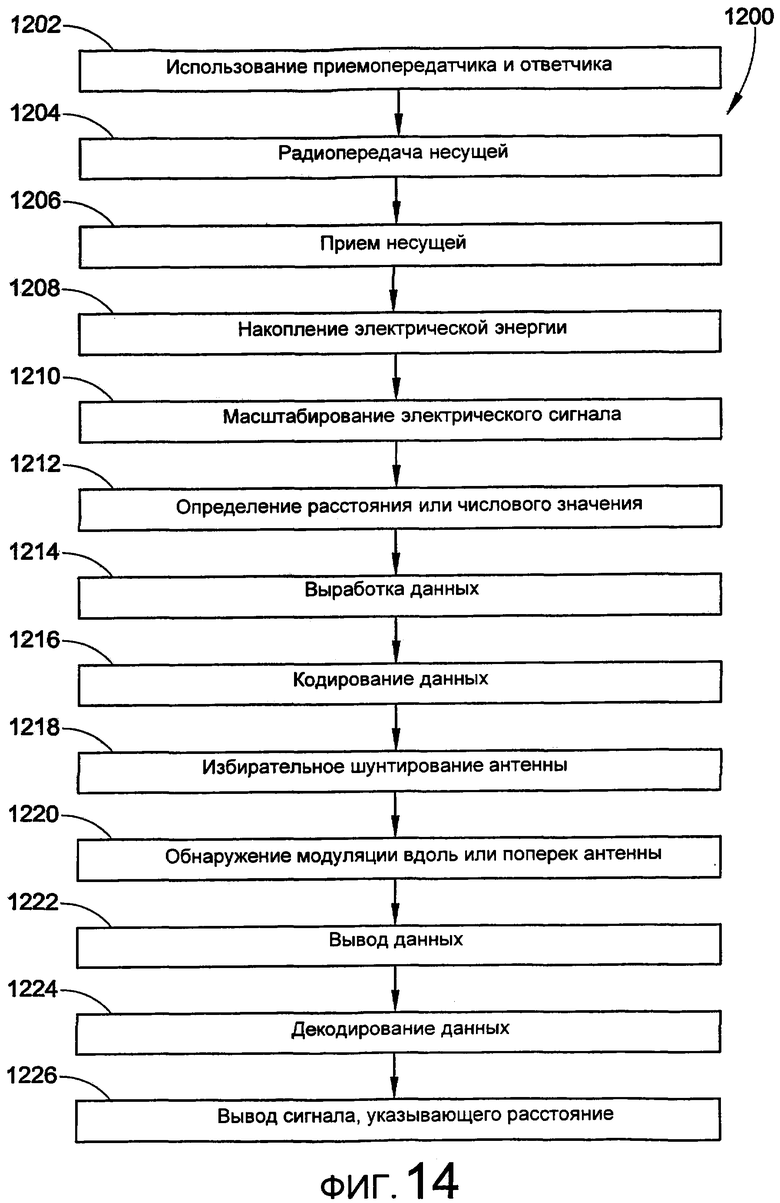
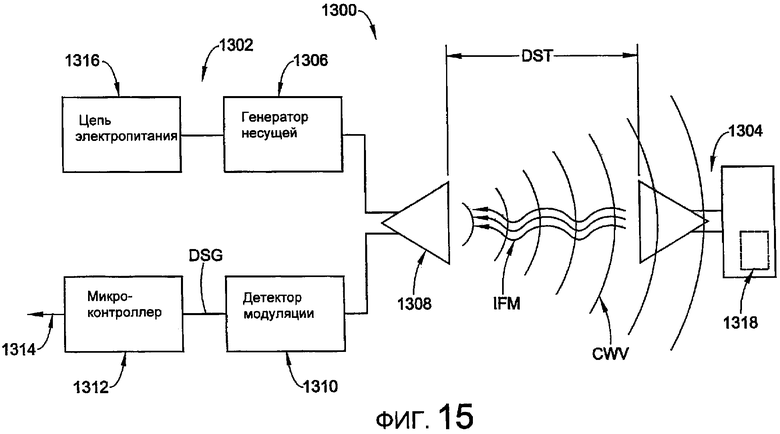
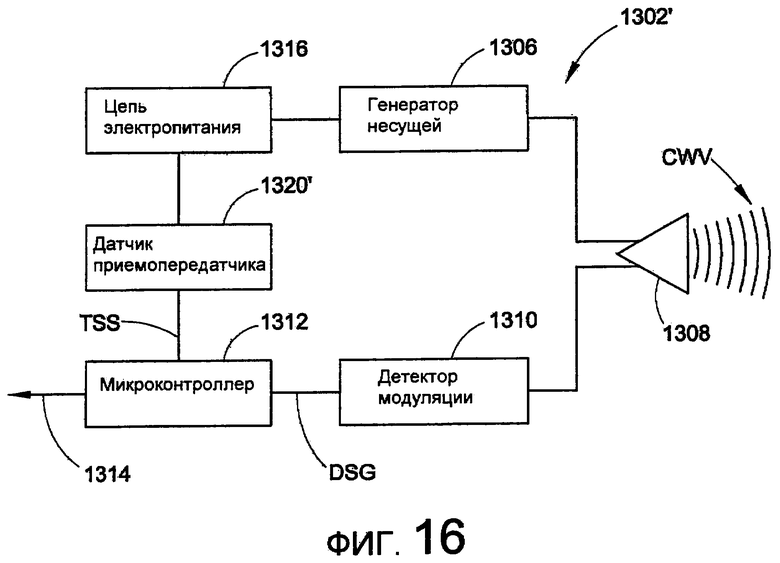
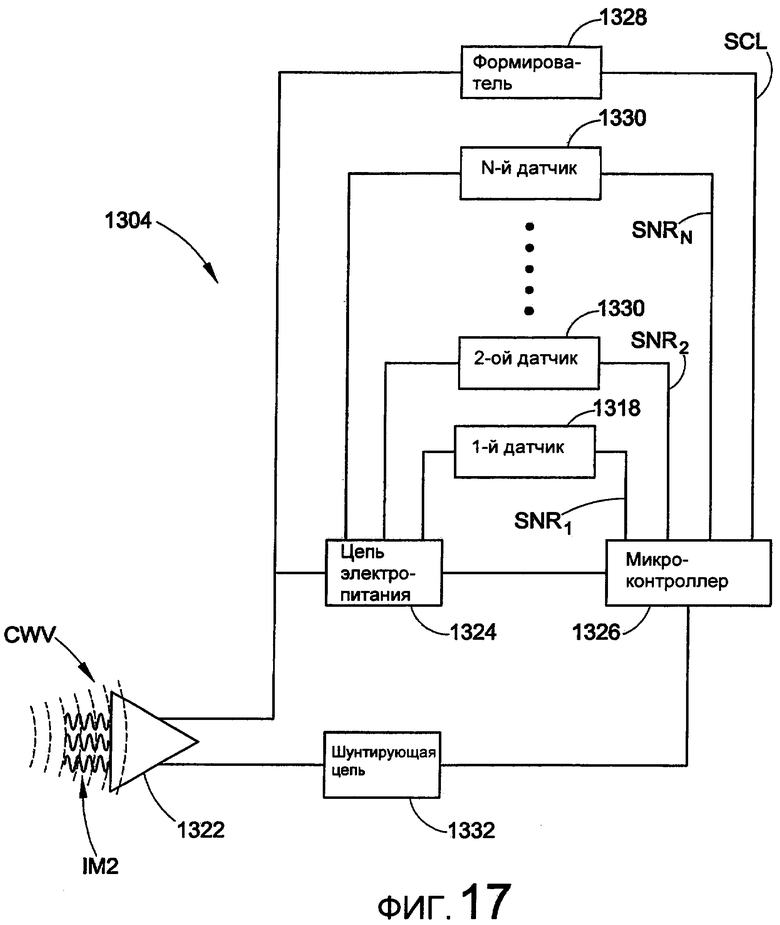
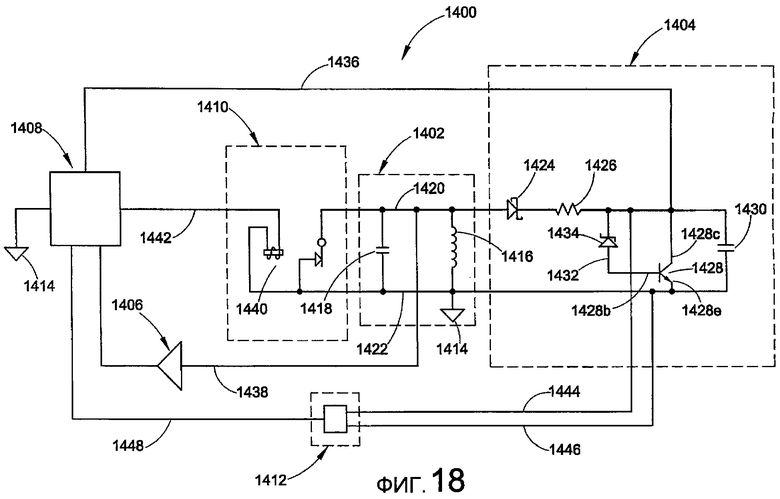
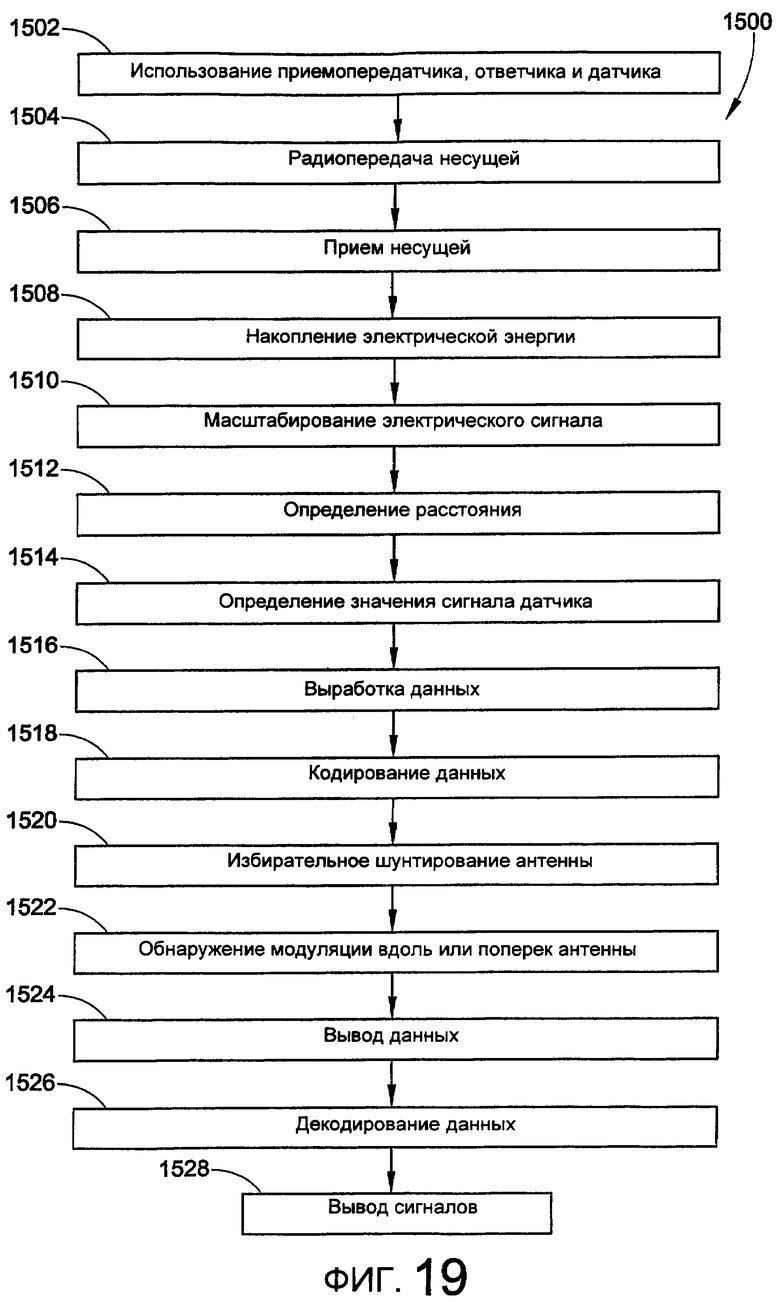
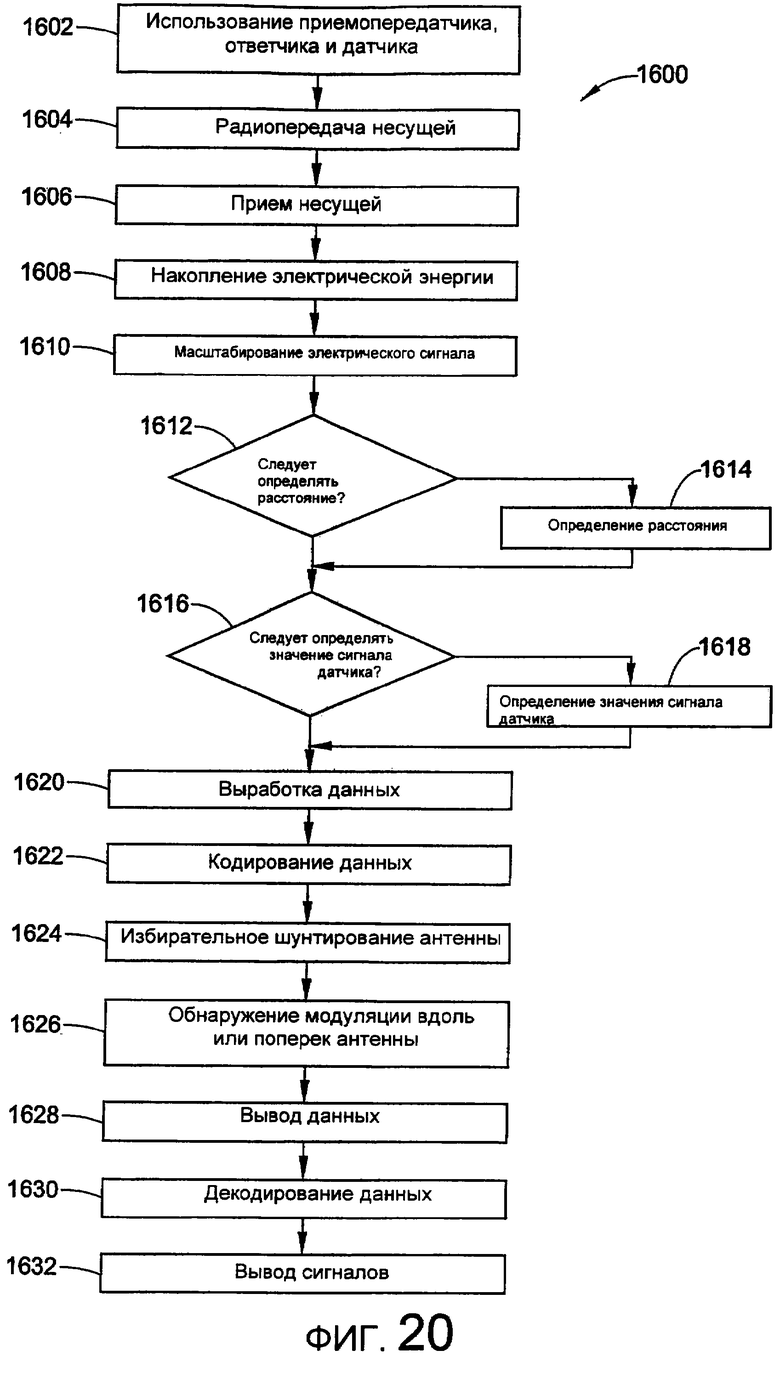
Изобретение относится к системам определения ориентации и обмена информацией. Устройство содержит первый концевой элемент, второй концевой элемент, гибкую стенку, приемопередатчик, ответчик, датчик. Способ включает в себя подачу питания на приемопередатчик и передачу по радио электромагнитного колебания, получение электромагнитного колебания и тем самым подачу питания на ответчик, получение сигнала расстояния в зависимости от расстояния между приемопередатчиком и ответчиком, выработку выходного сигнала датчика, создание модуляции электромагнитного колебания в зависимости от сигнала расстояния и выходного сигнала датчика с помощью ответчика, определение численного значения расстояния и значения параметра элемента подвески транспортного средства на основании модуляции с помощью приемопередатчика. Технический результат заключается в повышении точности определения параметров подвески. 2 н. и 8 з.п. ф-лы, 20 ил.
1. Узел пневматической рессоры, который содержит первый концевой элемент, второй концевой элемент, расположенный с промежутком от первого концевого элемента и испытывающий внешнее входное воздействие, гибкую стенку, закрепленную между первым и вторым концевыми элементами, приемопередатчик, закрепленный на первом концевом элементе и способный передавать по радио электромагнитное колебание, ответчик, закрепленный на втором концевом элементе и способный принимать указанное электромагнитное колебание, и датчик, закрепленный на втором концевом элементе и имеющий связь с ответчиком, причем датчик измеряет внешнее входное воздействие на второй концевой элемент и вырабатывает соответствующий выходной сигнал, причем ответчик способен определять расстояние между первым и вторым концевыми элементами на основании, по меньшей мере, частично, электромагнитного колебания, полученного им, получать выходной сигнал датчика и создавать модуляцию электромагнитного колебания в зависимости от сигнала расстояния и выходного сигнала датчика.
2. Узел пневматической рессоры по п.1, в котором датчик выбран из группы, в которую входят акселерометр, реле давления и термопара.
3. Узел пневматической рессоры по п.1, который дополнительно содержит второй датчик, закрепленный на первом концевом элементе или на втором концевом элементе.
4. Узел пневматической рессоры по п.1, в котором ответчик содержит антенну для приема указанного электромагнитного колебания, силовую цепь, которая имеет связь с антенной и может подводить электрическую энергию, процессор, который имеет связь с силовой цепью, и шунтирующую цепь, которая имеет связь с антенной и с процессором, причем шунтирующая цепь избирательно получает питание от процессора, чтобы модулировать указанное электромагнитное колебание.
5. Узел пневматической рессоры по п.4, в котором приемопередатчик взаимодействует с цепью электропитания для подачи питания на приемопередатчик, причем приемопередатчик содержит генератор несущей, антенну, которая имеет связь с генератором несущей и может передавать по радио электромагнитное колебание на основании сигнала несущей, и детектор модуляции, который имеет связь с антенной для обнаружения модуляции электромагнитного колебания и может создавать модуляцию выходного сигнала на основании указанной модуляции.
6. Узел пневматической рессоры по п.1, в котором процессор способен конвертировать сигнал расстояния и выходной сигнал датчика в соответствующие данные расстояния и данные датчика и способен вырабатывать информационное сообщение для связи с приемопередатчиком, которое содержит данные расстояния и данные датчика.
7. Способ определения параметра элемента подвески транспортного средства, который включает в себя
a) использование приемопередатчика, способного передавать по радио электромагнитное колебание,
b) использование ответчика, закрепленного на элементе подвески транспортного средства и расположенного на некотором расстоянии от указанного приемопередатчика,
c) использование датчика, закрепленного на элементе подвески транспортного средства, поблизости от указанного ответчика, причем датчик вырабатывает выходной сигнал, соответствующий параметру элемента подвески транспортного средства,
d) подачу питания на приемопередатчик и передачу по радио электромагнитного колебания,
e) получение указанного электромагнитного колебания и тем самым подачу питания на ответчик,
f) получение сигнала расстояния в зависимости от расстояния между приемопередатчиком и ответчиком, причем сигнал расстояния основан, по меньшей мере, частично, на электромагнитном колебании, полученном ответчиком,
g) выработку выходного сигнала датчика,
h) создание модуляции указанного электромагнитного колебания в зависимости от сигнала расстояния и выходного сигнала датчика с помощью ответчика, и
i) определение численного значения расстояния и значения параметра элемента подвески транспортного средства на основании указанной модуляции с помощью приемопередатчика.
8. Способ по п.7, который дополнительно предусматривает преобразование выходного сигнала датчика и сигнала расстояния в соответствующие данные датчика и данные расстояния, и выработку сообщения, которое содержит данные датчика и данные расстояния.
9. Способ по п.8, который дополнительно предусматривает передачу сообщения на приемопередатчик за счет создания избирательной модуляции указанного электромагнитного колебания, причем приемопередатчик обнаруживает указанную избирательную модуляцию и определяет указанное сообщение.
10. Способ по п.7, в котором получение сигнала расстояния на этапе f) включает выработку электрического сигнала, имеющего связь с электромагнитным колебанием, полученным ответчиком, и преобразование электрического сигнала в сигнал расстояния.
| Пневматическая подвеска | 1980 |
|
SU968536A2 |
| US 2004130442 A1, 08.07.2004 | |||
| US 5731754 A, 24.03.1998 | |||
| US 2004118197 A1, 24.06.2004. | |||

