Изобретение относится к радиолокации с активным ответом, и может быть использовано в системах радиозондирования атмосферы для измерения наклонной дальности от РЛС до аэрологического радиозонда (АРЗ) импульсным методом, пеленгации по угловым координатам и передачи телеметрической информации на одной несущей частоте.
Известны РЛС с активным ответом, которые кроме определения координат объектов используются также для передачи различной телеметрической информации. Примером такого устройства служит система слежения за АРЗ, разработанная английской фирмой Кроули (см. стр. 78-82, [1]; стр. 38-41, [2]). В этой системе координаты АРЗ определяются наземным радиолокационным запросчиком по полученным сигналам ответчика, который размещается на борту АРЗ. Одновременно с определением координат производится регистрация телеметрической информации о состоянии атмосферы (давлении, влажности и температуре), также передаваемой ответчиком.
Сложность, громоздкость и большое потребление энергии известной системы радиозондирования являются ее недостатками. Наличие отдельных антенн, передатчика и приемника на разные диапазоны частот (см. рис. 26, стр. 79, [1]; стр. 40, рис. 20, [2]) значительно усложняет и удорожает приемо-передающее устройство бортовой аппаратуры АРЗ, которая является по существу расходным материалом при зондировании, поскольку используется разово. Кроме того, большие габариты и вес этой аппаратуры создают угрозу безопасности для самолетов при их столкновении.
Предложенные в 50-е годы прошлого столетия сверхрегенеративные приемопередатчики (СПП) сначала использовались в авиационных системах опознавания «свой - чужой» (см. стр. 21, рис. 6, [1]). СПП отличаются предельной простотой конструкции, малыми весом и габаритами благодаря совмещению функций передатчика и приемника в одном каскаде - автогенераторе, работающем в сверхрегенеративном режиме. Позже СПП стали применять на борту АРЗ в качестве ответчиков в отечественных системах радиозондирования атмосферы (см. стр. 41-45, [2], авт. свид. SU115078, опубл. 01.01.1958, [3]).
Высокая чувствительность СПП к радиоимпульсному запросному сигналу позволяет сформировать ответный сигнал по дальности в виде короткой паузы в излучении приёмопередатчика при пониженной мощности запросного радиоимпульса радиопередающего устройства РЛС. Достаточно мощное излучение СПП, в свою очередь, обеспечивает надежное сопровождение АРЗ по угловым координатам и дальности, а также одновременную передачу телеметрической информации о состоянии атмосферы до расстояний 100…150 км (см. авт. свид. SU115078, опубл. 01.01.1958, [3]).
Отличительной особенностью систем радиозондирования является измерение радиоимпульсным методом наклонной дальности до АРЗ, снабженного СПП, обеспечивающим активный ответный сигнал. Запросный радиоимпульс от РЛС вызывает изменение структуры постоянно излучаемых приемопередатчиком АРЗ радиоимпульсов. Эти изменения выражаются в появлении энергетического максимума - первичной реакции и энергетического минимума в виде «паузы» - вторичной реакции СПП. Временная задержка от момента формирования запросного сигнала передатчика РЛС до энергетического минимума в ответном сигнале, принимаемом РЛС, определяет значение реальной наклонной дальности до АРЗ (см. стр. 61-67 [4]).
Весьма важным в использовании СПП является тот факт, что система определения координат и канал передачи телеметрической информации системы радиозондирования работают практически на одной частоте, что существенно упростило построение системы радиозондирования в целом. Это явилось решающим фактором при выборе типа приёмопередатчика в пользу СПП в АРЗ как устройства разового применения. Дальнейшее развитие теории и техники СПП позволило снизить мощность передатчика запросного сигнала, повысить помехоустойчивость комплекса и скрытность работы наземной РЛС при увеличении дальности сопровождения АРЗ до 250…300 км [5,6].
Среди технических решений, существенно улучшивших параметры и характеристики систем радиозондирования, известен способ, предложенный в патенте RU2304290C2 от 10.08.2007, бюл. № 22, [7]. Этот способ, включающий подачу запросного сигала наземной РЛС на аэрологический радиозонд, его усиление и переизлучение с помощью СПП в направлении РЛС, отличается тем, что в качестве запросного сигнала используют когерентные запросные радиоимпульсы РЛС, которые синхронизируют фазу радиоимпульсов СПП радиозонда, переизлучают их в направлении РЛС, выделяют из принятого излучения СПП когерентные ответные радиоимпульсы, определяют время задержки между запросными и ответными когерентными радиоимпульсами и определяют по времени задержки дальность до радиозонда.
Однако у известных систем радиозондирования, использующих в качестве радиолокационного ответчика СПП, имеются их общие существенные недостатки.
1. Недостаточная чувствительность устройства в режиме приёма, которая ограничивается ударными колебаниями, присущими сверхрегенеративному режиму работы СВЧ-генератора при формировании переднего фронта радиоимпульса (см. стр. 140-146, книги [8]; фиг. 4, патента RU 2345379 С1, опубл. 27.01.2009, бюл. № 3, [9]; фиг. 4, патента RU 2470323 C1, опубл. 20.12.2012, бюл. № 35, [10]; статью [11]).
2. Асинхронность процессов формирования приёмного окна СПП и посылок запросных радиоимпульсов РЛС вызывает дополнительные флуктуации временного положения, глубины и продолжительности ответной паузы (см. фиг. 5 патента RU2368916C2, опубл. 27.09.2009, бюл. № 27, [12]; стр. 566, рис. 4.4.18, книги [6]). Этот фактор является причиной принципиально неустранимой составляющей дополнительной ошибки измерения наклонной дальности.
3. Реальное расхождение частот приема и передачи СПП из-за нестабильности параметров элементов, снижающее его чувствительность как приемника (см. фиг. 3 и 4 патента RU2172965C1, 27.08.2001, [13]; см. фиг. 5, патента RU2470323C1, 20.12.2012, бюл. № 35, [10]; статья [14])
4. Сложность настройки СПП, связанная с тем, что изменения одного из параметров влечёт изменение другого, например, регулировка условий возбуждения колебаний вызывает изменение несущей частоты, что отмечено в патенте RU2470323C1, опубл. 20.12.2012, бюл. № 35, [10].
5. Широкий спектр излучения СПП и его шумовой характер создаёт проблемы электромагнитной совместимости, например, работе систем ГЛОНАСС/GPS (см. стр. 532-537, рис. 4.3.34, [6]). Ширина спектра по уровню половинной мощности обычно составляет 6...8 МГц в зависимости от длительности формируемых радиоимпульсов (см. рис. 36, стр. 103, [15]; см. фиг. 2 патента RU2368916C2, опубл. 27.09.2009, бюл. 27, [12]).
Свободным от указанных недостатков является способ приема и обработки запросного сигнала, использующий в качестве приёмопередатчика автодинный генератор, согласно патенту RU2624993C1, опубл. 11.07.2017, бюл. № 20, [16], который принят в качестве прототипа.
Способ приема и обработки запросного сигнала устройства-прототипа в соответствие с описанием принципа его действия состоит в следующей последовательности действий. Радиоимпульс сигнала запроса передающего устройства РЛС излучают посредством антенны РЛС в направлении АРЗ, принимают его на борту АРЗ посредством антенны преобразуя его в электромагнитные колебания радиоимпульса запроса, направляют его в резонатор автодинного генератора, смешивая с собственными колебаниями автодинного генератора, полученную смесь на нелинейности автодинного генератора преобразуют в автодинный отклик в виде изменений с частотой биений амплитуды и частоты колебаний, а также среднего значения тока и напряжения в цепи смещения активного элемента, посредством устройства регистрации выделяют автодинный отклик генератора в виде радиоимпульса с частотой сигнала биений, после этого радиоимпульс последовательно усиливают по амплитуде, фильтруют полосовым фильтром, далее путем амплитудного детектирования преобразуют радиоимпульс в видеоимпульс, сравнивают его амплитуду с пороговым уровнем, выполняют селекцию по временным параметрам запросного сигнала и формируют импульс ответной паузы, которым прерывают колебания автодинного генератора и, соответственно, излучение антенны на борту АРЗ, приемным устройством РЛС принимают сигнал АРЗ и фиксируют в нем момент прерывания излучения, сравнивают момент посылки сигнала запроса и момент приема прерывания излучения, после этого определяют время задержки между ними и по времени задержки определяют дальность до АРЗ, при этом частоту автодинного генератора модулируют сигналом радиотелеметрии для передачи метеоданных с борта АРЗ на РЛС системы радиозондирования атмосферы, причем предварительно частоту запросного сигнала РЛС отстраивают от частоты автодинного генератора на величину более полуширины полосы синхронизации автодинного генератора.
Однако у прототипа имеются следующие существенные недостатки.
В суммарное время задержки момента приема сигнала с борта АРЗ в виде прерывания излучения относительно радиоимпульса запроса кроме времени их распространения до АРЗ и обратно входит, так называемое, «аппаратное» время задержки сигнала. Это время определяется постоянными времени установления сигнала в полосовом усилителе и детекторе радиоимпульсов преобразованного сигнала запроса, временным интервалом работы селектора запросного сигнала и зависит также от стабильности работы компаратора с гистерезисом и формирователя импульсов ответной паузы. Величина аппаратного времени задержки автодинного приемопередатчика (АПП) имеет индивидуальный разброс и в определенной мере зависит от уровня радиосигнала запроса, что в совокупности с другими факторами снижает точность определения дальности до АРЗ. Для уменьшения данной погрешности измерений необходимо выполнение операции корректировки и тестирования аппаратного времени задержки, что усложняет и удорожает процесс настройки АРЗ при его изготовлении.
Таким образом, техническая проблема, на решение которой направлено заявляемое изобретение, состоит в повышении точности определения дальности до АРЗ, упрощении конструкции АПП и снижении его стоимости при сохранении функциональных возможностей прототипа.
Для решения указанной проблемы предложен способ определения дальности до аэрологического радиозонда, снабженного АПП, включающий подачу запросных радиоимпульсов РЛС на АРЗ, их прием, усиление и возбуждение возмущенных по амплитуде и частоте колебаний автодинного генератора с частотой биений, причем возмущенные колебания автодинного генератора переизлучают в направлении РЛС в качестве ответного радиосигнала АРЗ, принимают этот радиосигнал, выделяя из него автодинные изменения частоты в виде сигнала на частоте биений, сравнивают моменты посылки запросных радиоимпульсов и приема сигнала биений, затем определяют время задержки между ними, а по времени задержки определяют дальность до АРЗ. При этом частоту запросного сигнала РЛС предварительно отстраивают от частоты автодинного генератора АРЗ на величину, по крайней мере, на порядок больше полуширины полосы синхронизации, частоту автодинного генератора модулируют сигналом радиотелеметрии, а из ответного радиосигнала АРЗ сигнал на частоте биений выделяют посредством частотного детектора.
Сущность изобретения поясняется представленной на фиг. 1 структурной схемой части системы радиозондирования, которая задействована в определении дальности от РЛС до АРЗ согласно предлагаемому способу.
В состав РЛС системы радиозондирования атмосферы для определения расстояния до АРЗ входит канал дальности, который содержит (см. фиг. 1): синхронизатор РЛС 1, импульсный передатчик 2, антенный переключатель 3, приемное устройство 4, частотный детектор 5, измеритель дальности 6, антенну РЛС 7, шлейфы 8 и 9 выходных данных «Дальность» и «Выход сигнала телеметрии» соответственно. Приемоответчик системы радиозондирования атмосферы содержит автодинный генератор 10, выполненный с возможностью электрического управления частотой генерации, антенну 11 АРЗ и шлейф 12 «Данные телеметрии».
Импульсный передатчик 2 связан с передающим портом антенного переключателя 3, приемный порт которого через приемное устройство 4 и частотный детектор 5 связан с входом измерителя 6 дальности, а антенный порт антенного переключателя 3 связан с антенной 7 РЛС. Синхронизатор 1 РЛС связан с входом импульсного передатчика 2 и с входом измерителя дальности 6. Измеритель дальности 6 и приемное устройство 4 посредством шлейфов 8 и 9 связаны с блоком обработки метеорологических данных РЛС (на фиг. 1 не показан). Антенна 7 РЛС через радиоканал связана с антенной 11 АРЗ, подключенной к высокочастотному порту автодинного генератора 10, вход управления частотой которого через шлейф 12 «Данные телеметрии» связан с блоком телеметрии АРЗ (на фиг. 1 не показан).
Указанные узлы и блоки могут быть выполнены на следующих элементах и интегральных микросхемах общего применения. Импульсный передатчик 2 может быть выполнен на основе автогенератора с диэлектрическим резонатором в цепи обратной связи и двухкаскадного усилителя мощности, выполненных на мощных полевых или биполярных транзисторах (см. рис. 12, [5]). При этом импульсный передатчик 2 должен иметь частоту, отстоящую от частоты приемоответчика АРЗ на величину не менее половины полосы синхронизации автодинного генератора 10. Частотный детектор 5 может быть выполнен по балансной схеме с взаимно расстроенными контурами (см. стр. 209, рис. 5.49, [17]). Антенный переключатель 3 может быть выполнен на основе двух трехдецибельных направленных ответвителей на связанных линиях (см. стр. 193, рис. 2.54, [18]). Приемное устройство 4 может быть выполнено по схеме резонансного усилителя на малошумящем транзисторе с задержанной АРУ (см. стр. 102, рис. 3.20, [17]). Антенна 7 РЛС может быть выполнена в виде фазированной антенной решетки (см. патент RU2161847C1, опубл. 10.01.2001, [19]).
Антенна 11 АРЗ может быть выполнена в виде четвертьволнового вибратора (см. фиг. 4 патента RU2214614C2, опубл. 20.10.2003, [20]). Автодинный генератор 10, выполненный с возможностью электрической перестройки частоты, может быть изготовлен на полевом транзисторе по схеме, представленной на стр. 88, рис. 3.7 книги [21]. Синхронизатор 1 РЛС и измеритель дальности 6 могут быть выполнены на базе сигнального микроконтроллера (см., например, [22]).
В структурной схеме, представленной на фиг. 1, не раскрыты некоторые узлы, блоки и связи между ними, которые не являются обязательными при рассмотрении предлагаемого способа. К ним относятся, например, общая схема синхронизации РЛС, цепь управления антенным переключателем 3 и приводом антенны 7 РЛС от микропроцессорной системы управления, а также внутренние структуры импульсного передатчика 2 с системой автоматической подстройки частоты (АПЧ), приемного устройства 4 и блока обработки метеорологических данных РЛС.
В основе предлагаемого способа лежат использование особенностей проявления автодинного эффекта в генераторе при воздействии на него внешнего радиосигнала, а также метод регистрации этого эффекта с помощью приемного устройства РЛС. Временная задержка приема начала автодинных изменений относительно посылки сигнала запроса является основой для определения дальности от РЛС до АРЗ.
Более подробно суть предлагаемого способа рассмотрим на примере функционирования описанной выше реализации устройства.
При подаче на устройство напряжения питания в автодинном генераторе 10 (см. фиг. 1) возникают высокочастотные колебания, которые промодулированы узкополосной частотной модуляцией (ЧМ) сигналом телеметрии, использующей пакетный метод передачи информации (см. патент RU2529177C1, опубл. 27.09.2014, бюл. № 27 [23]). Кодированный сигнал с метеорологическими данными поступает по шлейфу 12 на встроенный в резонатор генератора 10 варикап от блока телеметрии (на фиг. 1 не показан). Полученные в генераторе 10 колебания через антенну 11 АРЗ в виде электромагнитных волн излучаются на частоте  по направлению РЛС радиозондирования атмосферы.
по направлению РЛС радиозондирования атмосферы.
В соответствии с заложенным в работу РЛС принципом действия (см. стр. 74-87, [6]) антенна 7 РЛС принимает пришедшие от АРЗ электромагнитные волны, преобразует их в радиосигнал в виде электромагнитных колебаний и направляет его через антенный переключатель 3 в приёмное устройство 4 РЛС. В приемном устройстве 4 радиосигнал усиливается и разделяется на два канала. Первый предназначен для получения информации о дальности до АРЗ, а второй - для приёма и обработки телеметрического сигнала с борта АРЗ. Телеметрический радиосигнал от приемного устройства 4 по шлейфу 9 поступает в блок обработки метеорологических данных (на фиг. 1 не показан). В этот же блок от системы управления приводом антенны 7 РЛС поступают результаты измерения угловых координат положения АРЗ относительно РЛС.
Импульсный передатчик 2 РЛС в соответствие с поступающими от синхронизатора 1 РЛС импульсами запуска вырабатывает периодические (с частотой повторения около 500 Гц) посылки коротких (порядка 1 мкс) радиоимпульсов запроса, которые через антенный переключатель 3 поступают в антенну 7 РЛС и излучаются в направлении АРЗ на частоте  .
.
Принятое на борту АРЗ антенной 11 излучение преобразуется в электрические колебания, которые в виде запросных радиоимпульсов, имеющих частоту , поступают в резонатор автодинного генератора 10. Здесь они смешиваются с собственными колебаниями генератора 10, имеющими частоту . Образовавшаяся смесь колебаний, взаимодействуя на нелинейности активного элемента генератора 10, вызывает в этом генераторе автодинный эффект, который в зависимости от соотношения величины разности частот  и полуширины полосы
и полуширины полосы  синхронизации генератора 10 проявляется по-разному (см. стр. 13-24, [24]).
синхронизации генератора 10 проявляется по-разному (см. стр. 13-24, [24]).
Если разностная частота  находится в пределах полуширины полосы синхронизации , то происходит захват частоты генератора 10 воздействующим сигналом и реакция генератора 10 на этом заканчивается. Если разностная частота находится за пределами полуширины полосы синхронизации , когда выполняется неравенство
находится в пределах полуширины полосы синхронизации , то происходит захват частоты генератора 10 воздействующим сигналом и реакция генератора 10 на этом заканчивается. Если разностная частота находится за пределами полуширины полосы синхронизации , когда выполняется неравенство  , то в генераторе 10 наблюдается режим биений. В этом режиме колебания генератора 10 сопровождаются сложной амплитудно-частотной модуляцией и значительными нелинейными искажениями автодинного сигнала [25]. При этом частота
, то в генераторе 10 наблюдается режим биений. В этом режиме колебания генератора 10 сопровождаются сложной амплитудно-частотной модуляцией и значительными нелинейными искажениями автодинного сигнала [25]. При этом частота  биений равна разности между частотой воздействующего сигнала и ближайшим к ней значением частоты края полосы синхронизации, то есть
биений равна разности между частотой воздействующего сигнала и ближайшим к ней значением частоты края полосы синхронизации, то есть  .
.
В случае выполнения сильного неравенства, когда  , в автодинном генераторе 10 наблюдаются квазигармонические изменения амплитуды
, в автодинном генераторе 10 наблюдаются квазигармонические изменения амплитуды  и частоты
и частоты  колебаний
колебаний  с частотой биений
с частотой биений  (см. стр. 19, 20, [26]):
(см. стр. 19, 20, [26]):


где
 - мгновенные значения колебаний на выходе автодинного генератора 10;
- мгновенные значения колебаний на выходе автодинного генератора 10;
 ,
,  - амплитуда и частота колебаний генератора 10 в стационарном режиме автономного генератора 10 соответственно;
- амплитуда и частота колебаний генератора 10 в стационарном режиме автономного генератора 10 соответственно;
 - коэффициент ослабления амплитуды радиосигнала на пути его распространения от РЛС до АРЗ, приведенный к порту антенны 11 АРЗ (см. стр. 23-24 книги [1]);
- коэффициент ослабления амплитуды радиосигнала на пути его распространения от РЛС до АРЗ, приведенный к порту антенны 11 АРЗ (см. стр. 23-24 книги [1]);
 - средняя мощность радиосигнала на порте антенны 11 АРЗ;
- средняя мощность радиосигнала на порте антенны 11 АРЗ;
 - средняя мощность запросного радиосигнала РЛС;
- средняя мощность запросного радиосигнала РЛС;
 ,
,  - коэффициенты усиления антенн 7 РЛС и 11 АРЗ соответственно;
- коэффициенты усиления антенн 7 РЛС и 11 АРЗ соответственно;
 - текущее расстояние от РЛС до АРЗ;
- текущее расстояние от РЛС до АРЗ;
 - длина волны излучения АРЗ в свободном пространстве;
- длина волны излучения АРЗ в свободном пространстве;
 - скорость распространения радиоволн;
- скорость распространения радиоволн;
 ,
,  - коэффициенты автодинного усиления принимаемого сигнала и относительных отклонений частоты генерации соответственно;
- коэффициенты автодинного усиления принимаемого сигнала и относительных отклонений частоты генерации соответственно;
 ,
,  - углы относительного фазового смещения автодинных характеристик;
- углы относительного фазового смещения автодинных характеристик;
 ,
,  - коэффициенты неизодромности и неизохронности генератора 10 соответственно;
- коэффициенты неизодромности и неизохронности генератора 10 соответственно;
 ,
,  - КПД и внешняя добротность резонатора генератора 10;
- КПД и внешняя добротность резонатора генератора 10;
 ,
,  ,
,  - дифференциальные параметры генератора 10, определяющие его приведенную крутизну инкремента, неизохронность и неизодромность соответственно.
- дифференциальные параметры генератора 10, определяющие его приведенную крутизну инкремента, неизохронность и неизодромность соответственно.
Максимальные изменения амплитуды и частоты колебаний генератора 10 в выражениях (1) и (2) определяются значениями множителей перед тригонометрическими функциями. Отметим, что коэффициент автодинного усиления  при указанном множителе в (1) показывает, во сколько раз амплитуда отклика автодинного генератора 10 больше амплитуды принимаемого сигнала и может быть
при указанном множителе в (1) показывает, во сколько раз амплитуда отклика автодинного генератора 10 больше амплитуды принимаемого сигнала и может быть  (см. рис. 2,в,г, [26]). При этом множитель в (2) численно равен полуширине
(см. рис. 2,в,г, [26]). При этом множитель в (2) численно равен полуширине  полосы синхронизации генератора 10 (см. стр. 25, 26, [26]):
полосы синхронизации генератора 10 (см. стр. 25, 26, [26]):

В результате расчета полуширины полосы синхронизации по формуле (3) при  , что соответствует случаю сильного сигнала и малого расстояния от РЛС до АРЗ (десятки метров), на частоте
, что соответствует случаю сильного сигнала и малого расстояния от РЛС до АРЗ (десятки метров), на частоте  при
при  ,
,  ,
,  и
и  получаем
получаем  , т.е. 2,37 МГц. Очевидно, что условию удовлетворяет выбор разности частот порядка
, т.е. 2,37 МГц. Очевидно, что условию удовлетворяет выбор разности частот порядка  , то есть 30 МГц и более.
, то есть 30 МГц и более.
Таким образом, за время действия запросного сигнала в одну микросекунду, в генераторе 10 при таком значении разности частот будут сформированы возмущенные колебания, модулированные по амплитуде и частоте не менее чем 30 периодами сигнала биений. В остальное время работы генератора 10 его колебания, как отмечалось выше, промодулированы сигналом телеметрии с пакетной передачей информации, скорость передачи которой (2,4 кбит/с) значительно ниже частоты сигнала биений.
Возмущенные колебания автодинного генератора 10, модулированные как сигналом биений, так и телеметрическими данными, в виде ответного радиосигнала АРЗ через антенну 11 АРЗ, пространство между АРЗ и РЛС, антенну 7 РЛС и антенный переключатель 3 поступают в приемное устройство 4. Здесь после усиления, как отмечалось выше, сигнал разделяются на два канала: канал «Дальности» и канал приёма и обработки телеметрического сигнала. В телеметрическом канале производится демодуляция «медленных» изменений частоты, выделение и декодирование метеоданных.
В канале дальности радиосигнал поступает на частотный детектор 5, на выходе которого формируется радиоимпульс, заполненный «быстрыми» колебаниями с частотой биений. Этот радиоимпульс поступает в измеритель дальности 6, где в соответствии с заложенным в работу РЛС принципом действия (см. стр. 74-87, [6]), по временному положению полученного радиоимпульса относительно момента посылки запросного радиоимпульса измеряется наклонная дальность до АРЗ. Далее с учетом угловых координат определяется текущие координаты нахождения АРЗ. При этом вносимое предлагаемым устройством аппаратное время задержки (порядка единиц-десятков наносекунд), связанное с переходным процессом в автодинном генераторе, пренебрежимо мало по сравнению со временем распространения радиосигналов от РЛС до АРЗ и обратно (см. рис. 3 в статье [26])
Автодинный генератор 10 в предлагаемом устройстве работает практически при непрерывном излучении без прерываний в режиме стационарных колебаний при наличии узкополосной ЧМ излучения сигналом телеметрического канала. Узкополосная ЧМ не оказывает существенного влияния на его режим работы и спектр излучения. Спектр предлагаемого устройства получается значительно уже, чем у прототипа и аналогов. Тем самым излучение АПП создаёт меньше помех работе других радиотехнических систем, включая системы ГЛОНАСС/GPS.
В режиме стационарных колебаний, при котором работает автодинный генератор 10, практически не требуется дополнительных средств для стабилизации его рабочей точки, как у СПП. Настройка автодинного генератора 10 в оптимальной режим по параметрам чувствительности и динамики формирования автодинного сигнала сводится к выбору коэффициента связи с нагрузкой и установке требуемой частоты генерации [26]. Кроме того, отсутствует необходимость выполнения операции корректировки и тестирования аппаратного времени задержки. Этим достигается упрощение методики настройки АПП при его производстве по сравнению с аналогами, что также обеспечивает преимущество предлагаемому устройству.
Кроме того, предлагаемое изобретение позволяет по сравнению с прототипом значительно упростить конструкцию АПП, исключив из его функциональной схемы блок выделения автодинного сигнала, усилитель, обнаружитель запросного сигнала и формирователь импульса ответной паузы без ущерба функциональным возможностям устройства, что снижает затраты на его изготовление.
Таким образом, предлагаемый способ определения дальности до АРЗ при сохранении функциональных возможностей известных устройств обеспечивает достижение технического результата изобретения - повышение точности определения дальности до АРЗ благодаря исключению флуктуаций временного положения ответного сигнала и аппаратной задержки радиосигнала. При этом необходимо добавить, что использование предлагаемого способа в существующих системах радиозондирования потребует лишь несущественных конструктивных изменений в РЛС, связанных с введением частотного детектора в канал дальности, и перестройки частоты запросного передатчика на величину разностной частоты  сигнала биений.
сигнала биений.
Результаты теоретических исследований АПП подтверждены данными экспериментов, полученными для макета приемопередатчика, выполненного на основе транзисторного генератора на частоту 1680 МГц, и подтвердили также осуществимость предложенного способа определения дальности до АРЗ и его пригодность для использования в перспективной разработке системы радиозондирования атмосферы [26].
Литература
1. Смирнов Г.Д., Горбачев В.П. Радиолокационные системы с активным ответом. - М.: Воениздат, 1962. 116 с.
2. Хахалин В.С. Современные радиозонды. - М.: Госэнергоиздат, 1959. 65 с.
3. Авт. свид. SU115078, опубл. 01.01.1958. Передатчик-ответчик для радиозонда / В.С. Хахалин, Б.В. Васильев, С.Ф. Калачинский.
4. Ефимов А.А. Принципы работы аэрологического информационно-вычислительного комплекса АВК-1. - М.: Гидрометеоиздат, 1989 г. - 148 с.
5. Иванов В.Э., Гусев А.В., Игнатков К.А. и др. Современное состояние и перспективы развития систем радиозондирования атмосферы в России // Успехи современной радиоэлектроники. 2015. № 9. С. 3-49.
6. Иванов В.Э., Фридзон М.Б., Ессяк С.П. Радиозондирование атмосферы. Технические и метрологические аспекты разработки и применения радиозондовых измерительных средств / Под ред. В.Э. Иванова - Екатеринбург: УрО РАН, 2004. - 596 с.
7. Патент RU2304290C2, опубл. 10.08.2007, бюл. № 22. МПК (2006.01) G01S13/95. Способ определения дальности до аэрологического радиозонда / В.Э. Иванов.
8. Белкин М.К., Кравченко Г.И., Скоробутов Ю.Г., Стрюков Б.А. Сверхрегенераторы. - М.: Радио и связь, 1983, 248 с.
9. Патент RU2345379C1, опубл. 27.01.2009, бюл. № 3. МПК (2006.01) G01S7/282. СВЧ-модуль сверхрегенеративного приемопередатчика радиозонда / В.Э. Иванов.
10. Патент RU2470323C1, опубл. 20.12.2012, бюл. № 35. МПК (2006.01) G01S13/95. Способ регулировки выходных параметров сверхрегенеративного приемопередатчика радиозонда / В.Э. Иванов, С.И. Кудинов, А.В. Гусев.
11. Кудинов С.И., Иванов В.Э. Исследование влияния флуктуационных и ударных колебаний на чувствительность сверхрегенеративных приемопередающих устройств // Ural Radio Engineering Journal. 2019. Т. 3. № 2. С. 170-194
12. Патент RU2368916C2, опубл. 27.09.2009, бюл. № 27. МПК (2006.01) G01S13/74. Моноимпульсная система со сверхрегенеративным ответчиком / В.Э. Иванов.
13. Патент RU2172965C1, опубл. 27.08.2001, бюл. № 24. МПК (2000.01) G01S13/74. Сверхрегенеративный приемопередатчик / В.Э. Иванов.
14. Кудинов С.И., Гусев А.В., Иванов В.Э. Исследование методов совмещения частот приёма и передачи в транзисторных сверхрегенеративных приёмопередатчиках радиозондов // 23-я Международная Крымская конференция «СВЧ-техника и телекоммуникационные технологии» (КрыМиКо’2015). Севастополь, 2013. С. 1026-1027.
15. Кудинов С.И. Транзисторные сверхрегенеративные приемопередающие устройства с повышенным потенциалом в системах радиолокации и связи / Диссертация к.т.н. - Екатеринбург: УГТУ-УПИ, 2007. - 158 с.
16. Патент RU2624993C1, опубл. 11.07.2017, бюл. № 20. МКИ (2006.01) G01S13/74. Автодинный приёмопередатчик системы радиозондирования атмосферы / В.Я. Носков, В.Э. Иванов, К.А. Игнатков и др.
17. Радиоприемные устройства / Под ред. Н.Н. Фомина. - М.: Радио и связь, 2003. - 515 с.
18. Л.М. Малорацкий. Микроминиатюризация элементов и устройств СВЧ. - М.: Советское радио, 1976. - 216 с.
19. Патент RU2161847C1, опубл. 10.01.2001. МПК7 H01Q1/38. Антенная система метеолокатора / В.Э. Иванов, С.Н. Шабунин, С.Т. Князев.
20. Патент RU2214614C2, опубл. 20.10.2003, МПК7 G01S7/00. Приемопередающая система аэрологического радиозонда и ее конструктив / В.Э. Иванов.
21. Баранов А.В., Кревский М.А. Транзисторные генераторы гармонических СВЧ колебаний. - М.: Горячая линия - Телеком, 2021. - 276 с.
22. Руководство пользователя: Семейство микроконтроллеров MSP430X1XX / Пер. с англ. - М.: ЗАО «Компэл», 2004.
23. Патент RU2529177C1, опубл. 27.09.2014, бюл. № 27. МПК (2006.01) G01S13/95. Система радиозондирования атмосферы с пакетной передачей метеорологической информации / В.Э. Иванов, А.В. Гусев, О.В. Плохих.
24. Демьянченко А.Г. Синхронизация генераторов гармонических колебаний. - М.: Энергия, 1976. - 240 с.
25. Минаев М.И. Низкочастотный спектр автодинного преобразователя частоты // Электронная техника. Сер. Электроника СВЧ. 1989. №. 7. С. 12-14.
26. Носков В.Я., Иванов В.Э., Гусев А.В. и др. Применение автодинов в перспективных системах радиолокационного зондирования атмосферы / Ural Radio Engineering Journal. 2022. Т. 6. № 1. С. 11-53.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ УРОВНЯ СИГНАЛА НА ВХОДЕ АВТОДИННОГО АСИНХРОННОГО ПРИЕМОПЕРЕДАТЧИКА СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2023 |
|
RU2808230C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| СПОСОБ СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2789416C1 |
| АВТОДИННЫЙ ПРИЁМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2624993C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| СПОСОБ И УСТРОЙСТВО СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786729C1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ГОМОДИННЫМ ПРИЕМОПЕРЕДАТЧИКОМ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2024 |
|
RU2829602C1 |
| АВТОДИННЫЙ АСИНХРОННЫЙ ПРИЕМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786415C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2004 |
|
RU2304290C2 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ПОВЫШЕННЫМИ ЭКСПЛУАТАЦИОННЫМИ ХАРАКТЕРИСТИКАМИ | 2021 |
|
RU2784448C1 |

Изобретение относится к радиолокации с активным ответом, и может быть использовано в системах радиозондирования атмосферы для измерения наклонной дальности от РЛС до аэрологического радиозонда (АРЗ) импульсным методом, пеленгации по угловым координатам и передачи телеметрической информации на одной несущей частоте. Техническим результатом является повышение точности определения дальности до АРЗ благодаря исключению времени аппаратной задержки сигнала и упрощение конструкции автодинного приемопередатчика (АПП). Заявленный способ включает подачу запросных радиоимпульсов РЛС на АРЗ, их прием, усиление и возбуждение возмущенных по амплитуде и частоте колебаний автодинного генератора с частотой биений. Далее возмущенные колебания автодинного генератора переизлучают в направлении РЛС в качестве ответного радиосигнала АРЗ, принимают этот радиосигнал, выделяя из него автодинные изменения частоты в виде сигнала на частоте биений, сравнивают моменты посылки запросных радиоимпульсов и приема сигнала биений, затем определяют время задержки между ними, а по времени задержки определяют дальность до АРЗ. При этом частоту запросного сигнала РЛС предварительно отстраивают от частоты автодинного генератора АРЗ на величину более полуширины полосы синхронизации, а частоту автодинного генератора модулируют сигналом радиотелеметрии для передачи метеоданных с борта АРЗ на РЛС. 3 з.п. ф-лы, 1 ил.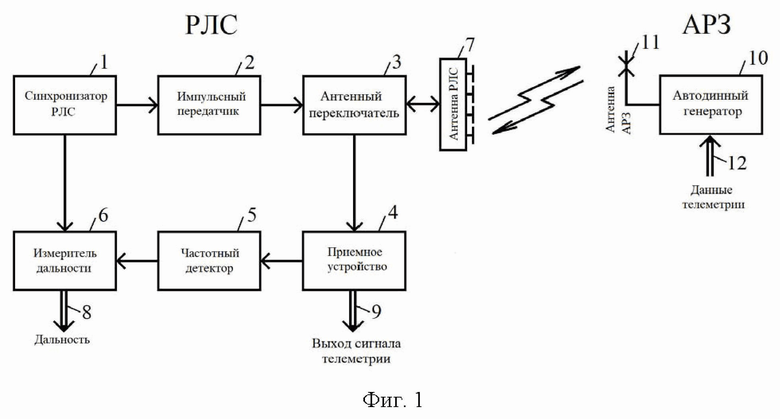
1. Способ определения дальности до аэрологического радиозонда (АРЗ), снабженного автодинным приемопередатчиком (АПП), включающий подачу запросных радиоимпульсов РЛС на АРЗ, их прием, усиление и возбуждение возмущенных по амплитуде и частоте колебаний автодинного генератора с частотой биений, отличающийся тем, что возмущенные колебания автодинного генератора переизлучают в направлении РЛС в качестве ответного радиосигнала АРЗ, принимают этот радиосигнал, выделяя из него автодинные изменения частоты в виде сигнала на частоте биений, сравнивают моменты посылки запросных радиоимпульсов и приема сигнала биений, затем определяют время задержки между ними, а по времени задержки определяют дальность до АРЗ.
2. Способ по п. 1, отличающийся тем, что частоту запросного сигнала РЛС предварительно отстраивают от частоты автодинного генератора АРЗ на величину, по крайней мере, на порядок больше полуширины полосы синхронизации.
3. Способ по п. 1, отличающийся тем, что частоту автодинного генератора на борту АРЗ модулируют сигналом радиотелеметрии.
4. Способ по п. 1, отличающийся тем, что из ответного радиосигнала АРЗ сигнал на частоте биений выделяют посредством частотного детектора.
| АВТОДИННЫЙ ПРИЁМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2624993C1 |
| МОНОИМПУЛЬСНАЯ СИСТЕМА СО СВЕРХРЕГЕНЕРАТИВНЫМ ОТВЕТЧИКОМ | 2007 |
|
RU2368916C2 |
| СПОСОБ РЕГУЛИРОВКИ ВЫХОДНЫХ ПАРАМЕТРОВ СВЕРХРЕГЕНЕРАТИВНОГО ПРИЕМОПЕРЕДАТЧИКА РАДИОЗОНДА | 2011 |
|
RU2470323C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА (АРЗ) | 2001 |
|
RU2199764C1 |
| US 9557414 B1, 31.01.2017 | |||
| US 8384582 B2, 26.02.2013 | |||
| US 5486830 A, 23.01.1996. | |||

