Изобретение относится к радиолокации с активным ответом и может быть использовано при разработке систем радиозондирования (СР) атмосферы с телеметрическим каналом передачи метеорологических данных и определением пространственных координат аэрологических радиозондов (АРЗ) путем измерения угловых координат методом равносигнальной зоны и наклонной дальности радиоимпульсным методом.
1. Общими проблемами производства и эксплуатации СР атмосферы являются создание высокоточных систем определения координат АРЗ, запускаемых в свободную атмосферу с помощью наполненных легким газом шаров-пилотов, реализация надежной передачи телеметрической информации на наземную станцию в оперативном радиусе действия СР, а также обеспечение электромагнитной совместимости (ЭМС) с другими радиосистемами. В аэрологических системах РФ широко используются радиолокационные СР, построенные на основе сверхрегенеративных приемопередатчиков (СПП), которые одновременно обеспечивают передачу телеметрической информации на наземную РЛС с борта АРЗ, измерение угловых координат и наклонной дальности радиоимпульсным методом на одной несущей частоте (Современное состояние и перспективы развития систем радиозондирования атмосферы в России / В.Э. Иванов, А.В. Гусев, К.А. Игнатков, С.И. Кудинов, И.В. Малыгин, В.Я. Носков, О.В. Плохих, В.В. Рысев, О.А. Черных // Успехи современной радиоэлектроники. 2015. №9. С. 3-49.).
В процессе развития аэрологии непрерывно повышаются технические характеристики, снижаются массогабаритные характеристики радиозондов, а также повышается помехозащищенность радиоканала АРЗ - наземная РЛС (см., например, патенты РФ RU 2172965 C1 (опубл. 27.08.2001, бюл. №24), RU 2214614 C1 (опубл. 20.10.2003, бюл. №29), RU 2291467 C1 (опубл. 10.01.2007, бюл. №1), RU 2304290 C1 (опубл. 10.08.2007, бюл. №22), RU 2529177 C1 (опубл. 27.09.2014, бюл. №27), RU 2571870 C1 (опубл. 27.12.2015, бюл. №36), RU 2576023 C1 (опубл. 27.02.2016, бюл. №6), RU 2784448 C1 (опубл. 24.11.2022, бюл. №20), RU 56001 U1 (опубл. 27.08.2006, бюл. №24), RU 104326 U1 (опубл. 10.05.2011, бюл. №13), RU 93546 U1 (опубл. 27.04.2010, бюл. №12), RU 106395 U1 (опубл. 10.07.2011, бюл. №19), RU 71777 U1 (опубл. 20.03.2008, бюл. №8), RU 166135 U1 (опубл. 20.11.2016, бюл. №32), RU 50682 U1 (опубл. 20.01.2006, бюл. №2), RU 40493 U1 (опубл. 10.09.2004, бюл. №25), RU 49283 U1 (опубл. 10.11.2005, бюл. №31).
Недостатками известных устройств АРЗ с СПП являются:
- широкий спектр излучения, ширина главного лепестка которого составляет 6…8 МГц на несущей частоте в диапазоне 1680±10 МГц;
- высокая выходная мощность передатчика АРЗ (порядка 0,15…0,25Вт) для обеспечения которой требуется повышенное потребление энергии от источника питания, что снижает время работы АРЗ;
- недостаточная стабильность рабочей частоты СПП, затрудняющая его эксплуатацию и нарушающая электромагнитную совместимость с другими радиосистемами.
Свободными от указанных недостатков являются автодинные приемопередатчики (АПП) согласно патентам: RU 2624993 C1 (опубл. 11.07.2017, бюл. №20), RU 2786415 С1 (опубл. 21.12.2022, бюл. 36), RU 2786729 С1 (опубл. 26.12.2022, бюл. 36), RU 2789416 C1 (опубл. 02.02.2023, бюл. 4), RU 2801741 C1 (опубл. 15.08.2023, бюл. 23), RU 2808230 C1 (опубл. 28.11.2023, бюл. 34), RU 2804516 C1 (опубл. 02.10.2023, бюл. 28), RU 2808775 C1 (опубл. 05.12.2023, бюл. 34). АРЗ на основе АПП выполнен, так же, как и СПП, на базе автогенератора, связанного с приемопередающей антенной, работающего практически в непрерывном режиме колебаний.
2. Наиболее близким аналогом предлагаемому устройству является АПП для АРЗ согласно патенту RU 2624993 C1 (опубл. 11.07.2017, бюл. 20) (Патент RU 2624993 C1, опубл. 11.07.2017, бюл. 20. Заявка 2016121285 от 30.05.2016. МПК G01S 13/74. Автодинный приемопередатчик системы радиозондирования атмосферы / В.Я. Носков, В.Э. Иванов, К.А. Игнатков, С.И. Кудинов, А.В. Гусев), принятый здесь в качестве прототипа.
Устройство содержит автогенератор с возможностью электрического управления частотой и связанную с ним антенну, причем к автогенератору подключены последовательно соединенные устройство выделения автодинного сигнала, усилитель, обнаружитель запросного сигнала и формирователь импульса ответной паузы, при этом выход формирователя импульсов ответной паузы связан с автогенератором, а обнаружитель запросного сигнала содержит последовательно соединенные полосовой фильтр, линейный амплитудный детектор, компаратор и временной селектор запросных импульсов, при этом АПП работает в режиме биений, когда частота автогенератора отстоит от частоты принимаемых радиоимпульсов запроса на величину более половины полосы синхронизации.
Однако у прототипа имеются следующие существенные недостатки.
3. В момент пуска АРЗ расстояние до запросного радиолокатора небольшое (десятки метров). При этом уровень сигнала запроса наибольший и в АПП может наблюдаться ряд нежелательных нелинейных явлений. Так, в режиме высокого уровня сигнала запроса полоса синхронизации значительно расширяется и может составлять порядка 10…20 МГц и более. Поскольку частота биений определяется как разность между частотой запросного сигнала и частотой ближайшей границы полосы синхронизации автогенератора (см. стр. 37-42, (Демьянченко А.Г. Синхронизация генераторов гармонических колебаний. - М.: Энергия, 1976. - 240 с.), то частота преобразованного на выходе устройства регистрации автодинного сигнала уменьшается на половину полосы синхронизации (порядка 5…10 МГц и более). В результате такого смещения частоты биений преобразованный сигнал может, во-первых, выйти за пределы полосы пропускания полосового фильтра и тем самым нарушить нормальную работу АПП и, соответственно, системы радиозондирования. Во-вторых, при приближении частоты сигнала запроса к границе полосы синхронизации собственные колебания автогенератора подвергаются значительной амплитудной и частотной модуляции (Минаев М.И. Низкочастотный спектр автодинного преобразователя частоты // Электронная техника. Сер. Электроника СВЧ. 1989. №. 7. С. 12-14.). Спектр этих колебаний «рассыпается» на гармоники (см. фиг. 27, (Курокава К. Принудительная синхронизация твердотельных СВЧ-генераторов // ТИИЭР. 1973. Т. 61. №10. С. 12-40.) частоты биений, создающие дополнительные помехи радиосредствам. В таком случае преобразованный автодинным автогенератором сигнал формируется с ангармоническими искажениями (см. стр. 37-42, рис. 1.14, (Демьянченко А.Г. Синхронизация генераторов гармонических колебаний. - М.: Энергия, 1976. - 240 с.), создающими проблемы при его обработке. Кроме того, в режиме высокого уровня сигнала запросного радиолокатора может происходить захват частоты АПП. При этом сигнал биений на выходе полосового фильтра отсутствует и происходит сбой в работе АПП. Отсюда следует основной недостаток прототипа - низкая надежность работа АПП и, соответственно, системы радиозондирования в диапазоне малых дальностей до АРЗ (от десятков до порядка нескольких сотен метров). При этом необходимо отметить, что данные состояния приземных слоев атмосферы на указанных высотах востребованы для многих служб прогноза погоды.
Таким образом, техническая проблема, на решение которой направлено заявляемое изобретение, состоит в необходимости расширения диапазона рабочих дальностей действия системы радиозондирования в область малых расстояний и, соответственно, расширение динамического диапазона АПП по уровню сигнала запроса.
Технический результат достигается за счет развития структуры АРЗ, а именно, на основе программно-аппаратного построения гомодинного приемопередатчика (ГПП), обеспечивающего повышение стабильности несущей частоты, снижение ширины спектра излучения передатчика АРЗ и повышение эффективности его работы.
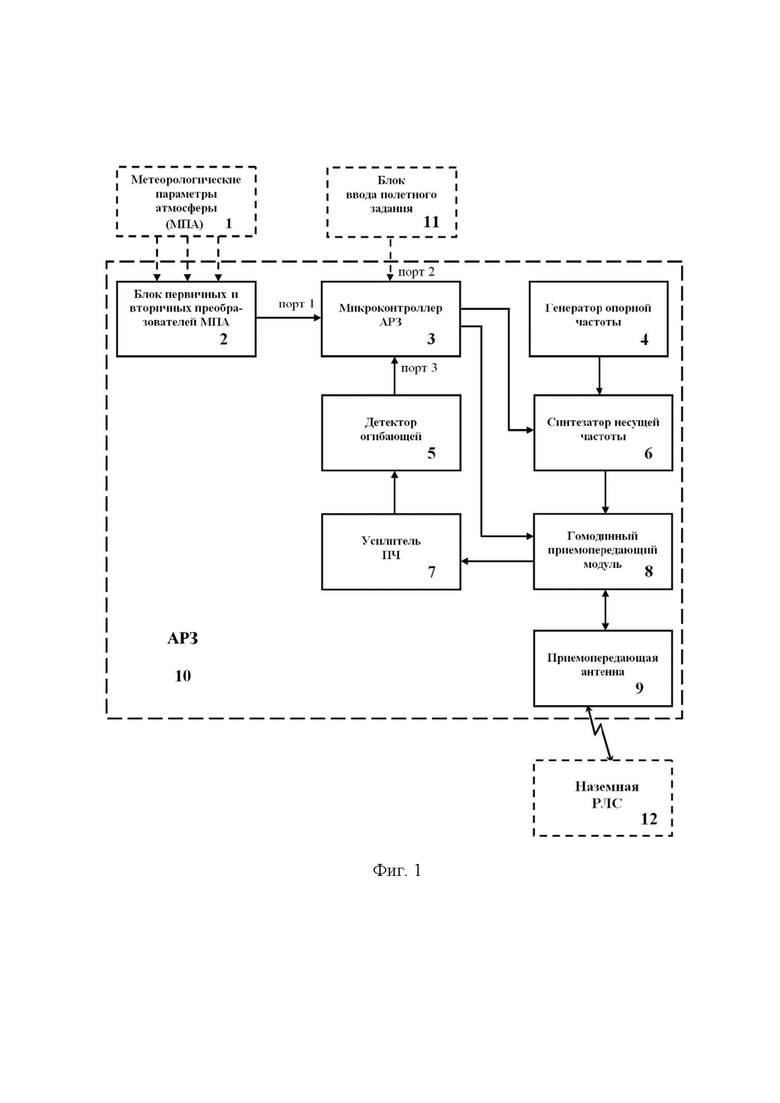
Для решения указанной проблемы предложен аэрологический радиозонд с гомодинным приемопередатчиком (ГПП) системы радиолокационного зондирования атмосферы, содержащий блок первичных и вторичных преобразователей метеорологических параметров атмосферы (МПА), микроконтроллера (МК), генератор опорной частоты (ГОЧ), синтезатор несущей частоты (СНЧ), гомодинный приемопередающий модуль (ГПМ), приемопередающую антенну (ППА), усилитель промежуточной частоты (УПЧ), детектор огибающей (ДО). При этом перечисленные блоки и узлы имеют следующие соединения: блок первичных и вторичных преобразователей МПА соединен с первым информационным портом МК, генератор опорной частоты через синтезатор несущей частоты СНЧ соединен с высокочастотным (ВЧ) входом гомодинного приемопередающего модуля, ВЧ выход которого соединен с приемопередающей антенной, сигнальный выход гомодинного приемопередающего модуля через последовательное соединение усилителя промежуточной частоты и детектор огибающей связан с третьим информационным портом МК, первый и второй управляющие порты которого подключены к синтезатору несущей частоты и управляющему входу включением-отключением передатчика гомодинного приемопередающего модуля соответственно. К третьему информационному порту МК присоединен выход блока полетного задания, подключаемый только при подготовке запуска АРЗ в атмосферу.
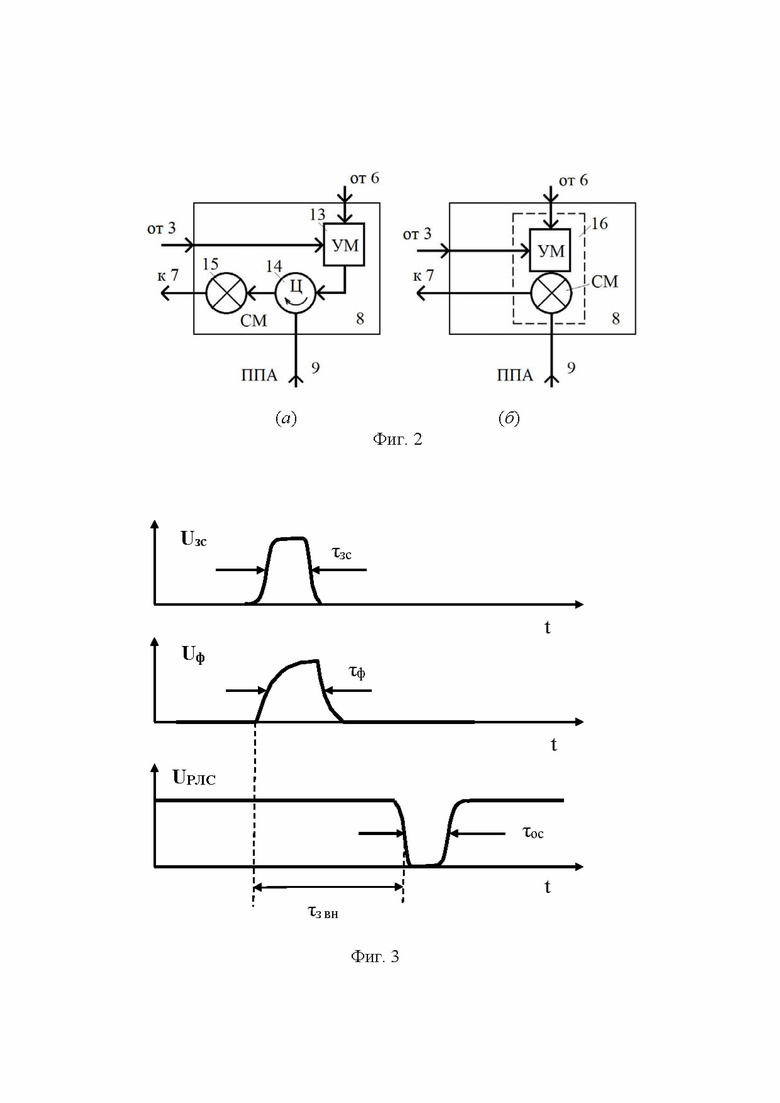
Гомодинный приемопередающий модуль (ГПМ) по первому варианту выполнения содержит усилитель мощности, циркулятор и смеситель, причем высокочастотный выход (ВЧ) усилителя мощности соединен с первым портом циркулятора, второй порт которого является ВЧ выходом ГПМ, а третий порт циркулятора присоединен к смесителю, при этом ВЧ входом ГПМ является вход усилителя мощности, а выходом - выход смесителя.
Гомодинный приемопередающий модуль по второму варианту выполнения содержит каскад усилителя-смесителя, при этом входом модуля является высокочастотный вход усилителя-смесителя, а его выходом - выход сигнала промежуточной частоты усилителя-смесителя.
На фиг. 1 приведена структурная схема АРЗ со следующими обозначениями:
1. - метеорологические параметры атмосферы - МПА;
2. - блок первичных и вторичных преобразователей МПА;
3. - микроконтроллер аэрологического радиозонда - МК АРЗ;
4. - генератор опорной частоты - ГОЧ;
5. - детектор огибающей (ДО) запросного радиоимпульса;
6. - синтезатор несущей частоты - СНЧ;
7. - усилитель промежуточной частоты - УПЧ;
8. - гомодинный приемопередающий модуль - ГПМ;
9. - приемопередающая антенна - ППА АРЗ;
10. - аэрологический радиозонд - АРЗ;
11. - блок ввода полетного задания;
12. - наземная РЛС СР.
Блок питания и шины питания условно не показаны. Блок ввода полетного задания не входит в штатный состав полетного АРЗ, а входит в этот состав только в наземном режиме при подготовке АРЗ к полету.
На фиг. 2 представлены варианты гомодинного приемопередающего модуля, выполненного по схеме с разделенными посредством циркулятора усилителем мощности и смесителем (а) и по схеме с объединенными в один функциональный узел усилитель-смеситель (б): 13 - усилитель мощности; 14 - циркулятор; 15 - смеситель; 16 - усилитель-смеситель.
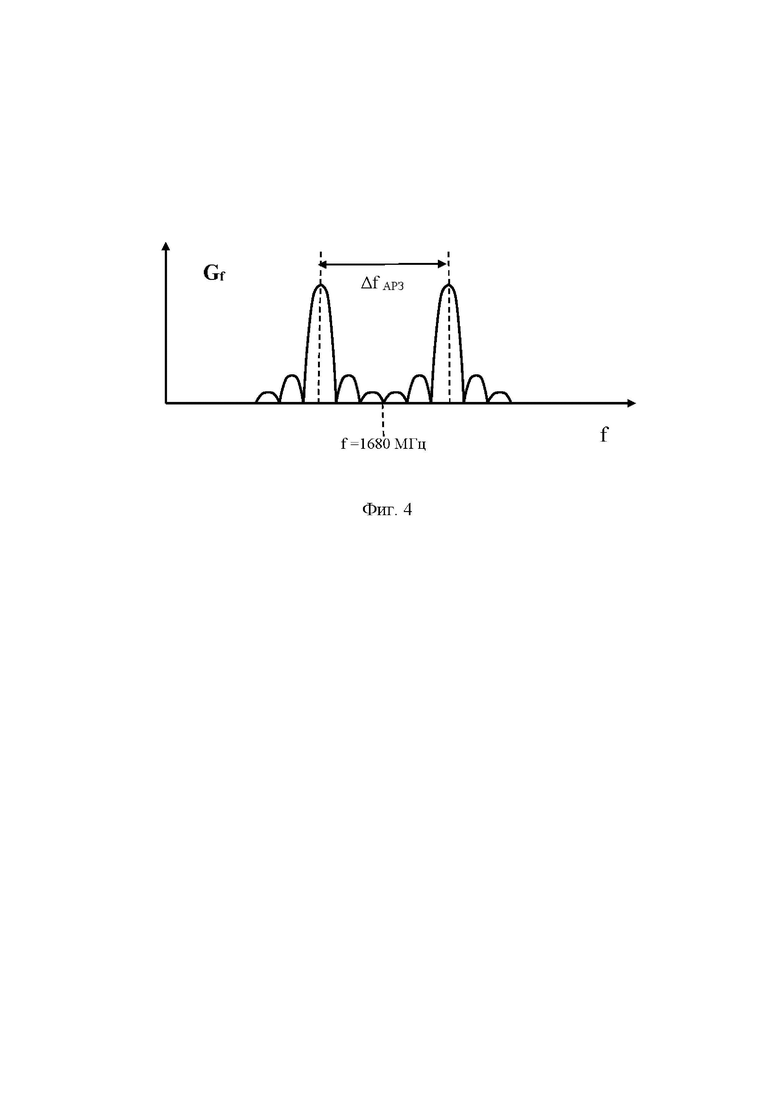
На фиг. 3 представлены графики запросного сигнала РЛС и ответного сигнала ГПП АРЗ, на которых изображено:
- Uзс - огибающая запросного радиоимпульса;
- Uф - огибающая запросного радиоимпульса на выходе фильтра ПЧ;
- UРЛС - ответный сигнал приемопередатчика АРЗ на выходе приемного устройства РЛС;
- τзс - длительность запросного радиоимпульса;
- τф - длительность запросного радиоимпульса на выходе фильтра ПЧ;
- τз вн - время задержки ответного сигнала в приемопередатчике АРЗ;
- τос - длительность ответного сигнала приемопередатчика АРЗ.
На фиг. 4 представлен спектр ответного сигнала АРЗ, на котором изображено:
- Gf - спектр частотно-модулированного сигнала передатчика АРЗ телеметрическим сигналом;
- ƒзс=1680±5 МГц - частота запросного сигнала передатчика РЛС;
- Δƒзс=±5 МГц - смещение частоты запросного сигнала передатчика РЛС относительно частоты излучения приемопередатчика АРЗ;
- ΔƒАРЗ=1680±0,1 МГц - частота излучения приемопередатчика АРЗ модулированного телеметрических сигналом;
- ΔƒПЧ=5±0,5 МГц - полоса пропускания усилителя промежуточная частоты.
Назначения и осуществимость узлов и блоков АРЗ 10 (фиг. 1):
- Блок первичных и вторичных преобразователей 2 обеспечивают сначала преобразование измеряемых метеорологических параметров атмосферы МПА 1 (температуру, влажность, давление, радиацию и т.п.) в электрические сигналы, а затем - в форму, удобную для цифровой обработки в микроконтроллере 3. Указанный блок может быть выполнен на следующих элементах: датчики температуры и влажности могут быть выполнены, например, по патентам РФ RU 2162238 C1 (опубл. 20.01.2001, бюл. 2), RU 2162239 C1 (опубл. 20.01.2001, бюл. 2), RU 2242752 C1 (опубл. 20.12.2004, бюл. 35); датчик давления может быть выполнен на основе датчиков типа МРХ (КАТАЛОГ фирмы МОТОРОЛА, 2024 г., Интернет: https://kit-e.ru/primenenie-datchikov-davleniya-firmy-motorola/); измерительный преобразователь может быть реализован по патенту RU 53462U1 (опубл. 10.05.2006, бюл. 13);
4. - микроконтроллер МК 3 осуществляет управление работой АРЗ 10 путем обработки информации преобразователей МПА 2, формирования управляющих воздействий на синтезатор несущей частоты 6 для частотной модуляции телеметрическим сигналом несущих колебаний, формирует импульс ответной паузы для кратковременного отключения ГПМ 8. МК 3 может быть реализован на основе микросхемы сигнального процессора, например, типа TMS320F2808 фирмы Texas Instrument (Руководство пользователя: Семейство микроконтроллеров MSP430Х1ХХ. Пер. с англ. М.: ЗАО Компэл», 2004. - 362 с.). В состав этой микросхемы входят блоки, выполняющие функции: универсальных асинхронных приемопередатчиков шин первого, второго и третьего информационных портов, постоянное запоминающее устройство (ПЗУ), хранящее программу обработки сигналов, управления и константы, высокоскоростное вычислительное ядро, выполняющее все функции цифровой обработки сигнала, а также оперативное запоминающее устройство (ОЗУ), выполняющее функции запоминания текущих значений и результатов отработки сигналов;
5. - генератор 4 опорной частоты вырабатывает стабильный по частоте сигнал для работы синтезатора несущей частоты 7 и может быть выполнен на основе трансимпедансного усилителя и кварцевого резонатора (Мурасов К.В. Микросхема МЭМС генератора опорной частоты на основе трансимпедансного усилителя. Ползуновский вестник. 2014. Т. 2. №4. С. 46-50.);
6. - детектор 5 огибающей предназначен для преобразования амплитуды запросного радиоимпульса в видеоимпульс. В качестве детектора 5 может использоваться линейный амплитудный детектор, выполненный, например, на основе микросхемы операционного усилителя (см. рис. 3.6-7 на стр. 173 книги (Ровдо А.А. Полупроводниковые диоды и схемы с диодами. М.: Лайт ЛТД, 2000. - 288 с.);
7. - синтезатор 6 несущей частоты вырабатывает стабильный гармонический сигнал на несущей частоте АРЗ 10 и по командам микроконтроллера 3 обеспечивает узкополосную частотную модуляцию несущей частоты приемопередатчика телеметрической информацией. Теория и практика проектирования синтезаторов частоты в настоящее время достаточно разработана для выполнения инженерных расчетов (Ченакин А.В., Горевой А.В. Практическое построение синтезаторов частот СВЧ-диапазона. - М.: Горячая линия - Телеком, 2021. - 280 с.);
8. - усилитель 7 промежуточной частоты предназначен для фильтрации и усиления запросных сигналов РЛС 12 в диапазоне частот, равных разности между частотой высокочастотных (несущих) колебаний АРЗ 10 и запросного радиоимпульса РЛС 12. Усилитель 7 промежуточной частоты может быть выполнен в виде обычного полосового усилителя с линейной амплитудной характеристикой в рабочем диапазоне уровней сигнала (см., например, стр. 112-118, рис. 3.28 и 3.30 книги (Радиоприемные устройства / Под ред. Н.Н. Фомина. - М.: Радио и связь, 2003. - 520 с.);
9. - гомодинный приемопередающий модуль 8 обеспечивает усиление мощности сигнала синтезатора 6 несущей частоты и при поступлении запросного радиосигнала РЛС 12 вырабатывает сигнал на разностной (промежуточной) частоте. Это устройство по первому варианту выполнения ГПМ 8 может быть выполнено с развязкой усилителя мощности и смесителя посредством циркулятора (см. на стр. 173, фиг. 7.10а монографии (Issakov V. Microwave Circuits for 24 GHz Automotive Radar in Silicon-based Technologies. - Springer, 2010. - 223 p.). ГПМ 8 по второму варианту может быть выполнен в виде комбинированного каскада, совмещающего функции усилителя мощности и преобразователя частоты (PAMIX - Power-Amplifier-Mixer), в котором запросный радиоимпульс РЛС 12 смешивается с усиленным высокочастотным радиосигналом, преобразуется по частоте и выводится при помощи фильтра в цепи смещения. При этом частота преобразованного сигнала соответствует разности частот усиленного высокочастотного радиосигнала и принятого запросного радиосигнала. Варианты выполнения блока PAMIX представлены на стр. 173-175, фиг. 7.10б, 7.11 моногр. (Issakov V. Microwave Circuits for 24 GHz Automotive Radar in Silicon-based Technologies. - Springer, 2010. - 223 p.), а также на фиг. 3 патента (Патент US 7920090 B2, опубл. 05.04.2011, МКИ G01S 7/03. Radar system / Tiebout.);
10. - приемопередающая антенна 9 обеспечивает излучение радиосигналов АРЗ 10 в направлении наземной РЛС 12 и прием от нее запросных радиоимпульсов. Антенна 9 может иметь различные варианты исполнения, например, в виде четвертьволнового несимметричного вибратора, щелевой или полосковой фазированной решетки, рупорной, диэлектрической, линзовой антенны или антенны типа «вытекающей волны» (см. стр. 21, 114, 142, 151, 200 в (Антенны и устройства СВЧ. Расчет и проектирование антенных решеток и их излучающих элементов. / Под ред. Д.И. Воскресенского. - М.: Радио и связь. 1972. - 320 с.).
- блок 11 ввода полетного задания непосредственно в структурную схему АРЗ 10 не входит, он обеспечивает перед пуском АРЗ 10 в атмосферу запись в память микроконтроллера 3 АРЗ параметров несущей частоты ГПМ 8 и корректировку режима работы его измерительного тракта.
В состав АРЗ 10 могут входить дополнительные элементы, не изменяющие суть изобретения.
АРЗ 10 с гомодинным приемопередатчиком ГПМ 8 системы радиолокационного зондирования атмосферы работает следующим образом.
11. После подачи на АРЗ 10 напряжения от источника питания (на фиг. 1 не показан) в МК 3 вычислительным ядром в соответствие с подпрограммой «Установка» (Руководство пользователя: Семейство микроконтроллеров MSP430Х1ХХ. Пер. с англ. М.: ЗАО Компэл», 2004. - 362 с.) производится сначала настройка периферийных устройств, распределение внутренней памяти, установка значений внутренних переменных, копирование исполняемого кода команд из ПЗУ с низкой производительностью в высокопроизводительное ОЗУ и подача команды «Готов», по которой МК 3 переходит в режим готовности приема информационных сигналов от блока первичных и вторичных преобразователей и с выхода детектора огибающей 5 с последующим формированием массива данных в памяти ОЗУ.
Одновременно с подготовкой МК 3 к работе после подачи напряжения питания происходит запуск генератора 4 опорной частоты (см. фиг. 1). Выходной сигнал этого генератора поступает на вход синтезатора 6 несущей частоты, на выходе которого формируются стабильные колебания, частота которых задается кодом, поступающим от МК 3, например, ƒАРЗ=1680,0 МГц. Эти колебания после усиления усилителем мощности в гомодинном приемопередающем модуле 8 поступают в приемопередающую антенну 9, преобразуются в электромагнитные волны и излучаются в окружающее пространство в соответствие с диаграммой направленности антенны 9.
Передача метеорологической информации осуществляется непрерывно с помощью узкополосной частотной манипуляции несущей частоты приемопередающего модуля 8 в диапазоне ΔƒАРЗ-1680±0,1 МГц сигналом телеметрических цифровых пакетов, поступающих из МК 3 (фиг. 4). Применение узкополосной частотной модуляции обеспечивает высокую надежность приема координатно-телеметрической информации АРЗ 10 и не требует значительной доработки приемника РЛС 12.
При поступлении от РЛС 12 запросных радиоимпульсов длительностью, например, τзс=2 мкс, на частоте, смещенной относительно несущей частоты передатчика ГМП 8 на величину промежуточной частоты, например, 5 МГц, на сигнальном выходе ГПМ 8 формируется радиоимпульс на промежуточной частоте (в данном случае 5 МГц). Этот радиоимпульс через усилитель 7 промежуточной частоты поступает на вход детектора 5 огибающей и, далее, в виде видеоимпульса поступает на третий информационный порт микроконтроллера 3. Микроконтроллер 3 в соответствие с заложенной в него программой обрабатывает принятый видеоимпульс и через некоторое время задержки, например, τз вн=2…3 мкс, выдает команду формирования ответного сигнала передатчика АРЗ в составе ГПМ 8 на запросный радиоимпульс РЛС 12 по дальности. Данный сигнал в виде кратковременного (порядка τос=1,0…2,0 мкс) прекращения (фиг. 2) излучения - паузы, например, отключением питания усилителя мощности, обеспечивает наблюдение и автоматическое сопровождение и измерение наклонной дальности до АРЗ 10 наземной РЛС 12.
Гомодинный приемопередающий модуль 8 при первом варианте исполнения работает следующим образом. Выходные колебания синтезатора 6 несущей частоты после прохождения через усилитель 13 мощности и, проходя по пути: первый порт - второй порт циркулятора 14, поступают в приемопередающую антенну 9 (см. фиг. 2а). Принятые этой же антенной 9 запросные радиоимпульсы РЛС 12, пройдя по пути: второй порт - третий порт циркулятора 14, поступают на вход смесителя 15, на который также поступает часть мощности с выхода усилителя 13, просачивающаяся по пути: первый порт - третий порт циркулятора 14. В результате взаимодействия образовавшейся смеси на нелинейности смесителя 15 на его выходе формируется сигнал разностной (промежуточной) частоты который поступает на вход усилителя ПЧ 7.
Гомодинный приемопередающий модуль 8 при втором варианте исполнения, когда в качестве гомодинного приемопередатчика используется комбинированный каскад, совмещающий функции усилителя мощности и преобразователя частоты (PAMIX - Power-Amplifier-Mixer), работает следующим образом. Выходные колебания синтезатора 6 несущей частоты после прохождения через усилитель-смеситель 16 мощности поступают в приемопередающую антенну 9 (см. фиг. 2б). Принятые этой же антенной 9 запросные радиоимпульсы РЛС 12 на выходе этого же усилителя-смесителя 16 смешиваются с его собственными колебаниями. В результате взаимодействия образовавшейся смеси на нелинейности выходной характеристики усилителя-смесителя 16 на его выходе формируется сигнал разностной (промежуточной) частоты. Этот сигнал выводится при помощи фильтра в цепи смещения усилителя-смесителя 16 на вход усилителя ПЧ 7.
Необходимо отметить, что в предлагаемом устройстве частота преобразованного сигнала соответствует разности частот усиленного высокочастотного радиосигнала и принятого запросного радиосигнала РЛС независимо от уровня последнего. Этим достигается решение поставленной выше технической проблемы - расширение диапазона рабочих дальностей действия системы радиозондирования в область малых расстояний и, соответственно, расширение динамического диапазона приемопередатчика по уровню сигнала запроса.
Предложенное построение АРЗ необходимо также для того, чтобы сохранить преемственность радиолокационного метода измерения наклонной дальности до АРЗ в отечественных СР, повысить их ЭМС с другими радиосистемами, надежность передачи телеметрической информации, максимально точно определять пространственные координаты, а также, скорость ветра, его градиент и направление в требуемом диапазоне высот.
Таким образом, в целом, предлагаемое техническое решение позволяет существенно повысить тактико-технические и эксплуатационные характеристики отечественных радиолокационных СР:
- определение текущего пространственного положения АРЗ в отечественной радиолокационной СР осуществляется путем измерения угловых координат методом равносигнальной зоны и измерения наклонной дальности до АРЗ радиоимпульсным методом. При этом обеспечивается высокая точность определения текущих координат АРЗ, направления и скорости ветра во всем оперативном радиусе действия СР, не менее 250км;
- для повышения ЭМС СР, мощность излучения гомодинного приемопередатчика АРЗ может быть снижена с уровня порядка 0,15…0,25 Вт до 0,010…0,015 Вт за счет применения узкополосной частотной модуляции и уменьшения полосы пропускания приемного устройства наземной РЛС, а также существенного повышения стабильности несущей частоты АРЗ;
- важно подчеркнуть, что для нормальной работы СР с предложенным АРЗ требуется, в основном, только модернизация программного обеспечения цифровой обработки сигнала радиозонда, принимаемого наземной РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УРОВНЯ СИГНАЛА НА ВХОДЕ АВТОДИННОГО АСИНХРОННОГО ПРИЕМОПЕРЕДАТЧИКА СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2023 |
|
RU2808230C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2023 |
|
RU2801741C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| СПОСОБ СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2789416C1 |
| АВТОДИННЫЙ АСИНХРОННЫЙ ПРИЕМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786415C1 |
| АВТОДИННЫЙ ПРИЁМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2624993C1 |
| СПОСОБ И УСТРОЙСТВО СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786729C1 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ С ФАЗОМОДУЛИРОВАННЫМ КАНАЛОМ ТЕЛЕМЕТРИИ | 2021 |
|
RU2787777C1 |
Изобретение относится к радиолокации с активным ответом и может быть использовано при разработке систем радиозондирования (СР) атмосферы с телеметрическим каналом передачи метеорологических данных и определением пространственных координат аэрологических радиозондов (АРЗ) путем измерения угловых координат методом равносигнальной зоны и наклонной дальности радиоимпульсным методом. Техническим результатом изобретения является расширение диапазона рабочих дальностей действия системы радиозондирования в область малых расстояний, а также повышение эксплуатационно-технических характеристик и расширение функциональных возможностей СР. Аэрологический радиозонд с гомодинным приемопередатчиком системы радиолокационного зондирования атмосферы дополнительно включает в себя гомодинный приемопередатчик, обеспечивающий повышение стабильности несущей частоты, снижение ширины спектра излучения передатчика АРЗ и повышение эффективности его работы. 2 з.п. ф-лы, 4 ил.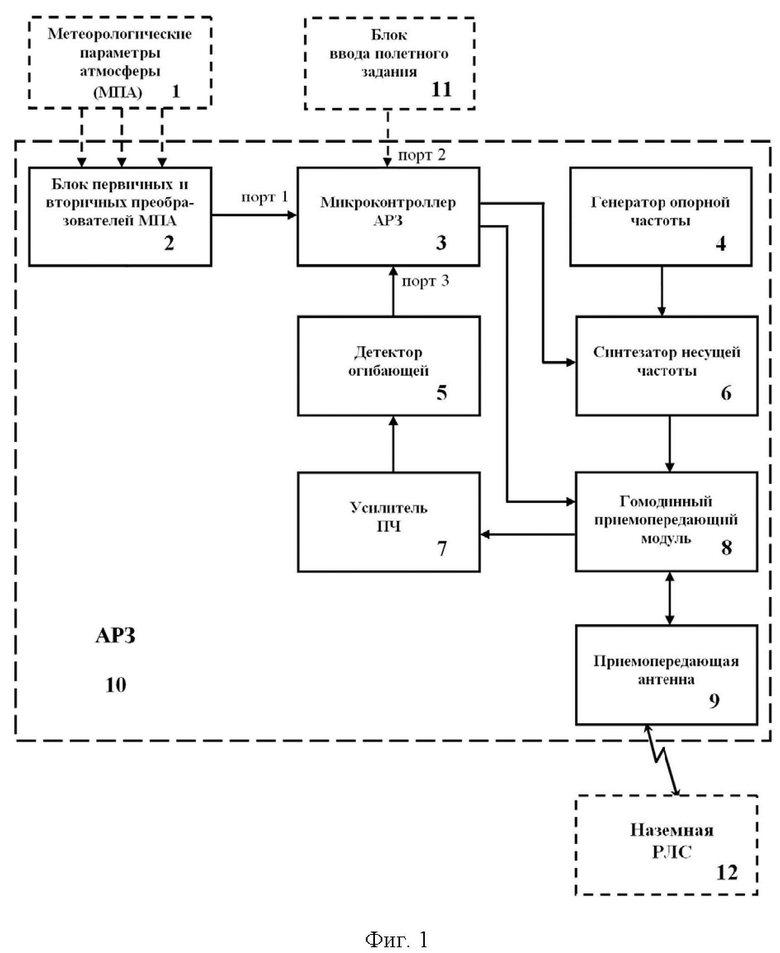
1. Аэрологический радиозонд с гомодинным приемопередатчиком системы радиолокационного зондирования атмосферы, содержащий блок первичных и вторичных преобразователей метеорологических параметров атмосферы, приемопередающую антенну и последовательно соединенные усилитель промежуточной частоты и детектор огибающей, отличающийся тем, что в него введены микроконтроллер, генератор опорной частоты, синтезатор несущей частоты и гомодинный приемопередающий модуль, при этом блок первичных и вторичных преобразователей метеорологических параметров атмосферы соединен с первым информационным портом микроконтроллера, генератор опорной частоты через синтезатор несущей частоты соединен с высокочастотным входом гомодинного приемопередающего модуля, высокочастотный выход которого соединен с приемопередающей антенной, сигнальный выход гомодинного приемопередающего модуля через последовательное соединение усилителя промежуточной частоты и детектор огибающей связан со вторым информационным входом микроконтроллера, первый и второй управляющие выходы которого подключены к синтезатору несущей частоты и управляющему входу гомодинного приемопередающего модуля соответственно.
2. Радиозонд по п. 1, отличающийся тем, что гомодинный приемопередающий модуль содержит усилитель мощности, циркулятор и смеситель, причем высокочастотный выход усилителя мощности соединен с первым портом циркулятора, второй порт которого является выходом модуля, а третий порт циркулятора присоединен к смесителю, при этом входом модуля является вход усилителя мощности, а его выходом – выход смесителя.
3. Радиозонд по п. 1, отличающийся тем, что гомодинный приемопередающий модуль содержит каскад усилителя-смесителя, при этом входом модуля является высокочастотный вход усилителя-смесителя, а его выходом – выход сигнала промежуточной частоты усилителя-смесителя.
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| Устройство для сортировки цилиндрических изделий по наружному диаметру | 1955 |
|
SU103195A1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ С ФАЗОМОДУЛИРОВАННЫМ КАНАЛОМ ТЕЛЕМЕТРИИ | 2021 |
|
RU2787777C1 |
| US 5534868 A, 09.07.1996 | |||
| US 5122805 A, 16.06.1992 | |||
| CN 113589291 A, 02.11.2021. | |||

