Изобретение относится к буксируемым подъемным кранам катамаранного типа и предназначено для использования при осуществлении подъема со дна водоемов затонувших судов и других грузов, а также для их транспортировки в подвесном состоянии в заданную точку.
Известны технические решения для подъема затонувших объектов с различных глубин с помощью захватов путем обеспечения достаточного тягового усилия от грузоподъемных устройств, находящихся на плавучих платформах, в частности на понтонах (RU 2185997 C2, B63C 7/02, 27.07.2002; RU 2205769 C2, B63C 7/00, 20.06.2001; DE 20308850 U1, B63C 7/04, 02.10.2003).
Однако известные технические решения не обеспечивают подъем затонувших объектов с большой глубины и большого веса. Кроме того, удержание поднятого объекта на поверхности моря в период выхода его из толщи воды с определенным ускорением сопряжено с потерей остойчивости. Проблемной также является и последующая транспортировка объекта к месту базирования.
Наиболее близким к предложенному является плавучий кран, предназначенный для подъема затонувших объектов и содержащий грузоподъемные механизмы со стрелами, распорками, лебедками и захватными крюками, два понтона, соединенные между собой стрелами грузоподъемных механизмов, одна из которых прикреплена к первому понтону жестко, а ко второму понтону - шарнирно, а другая, наоборот, к первому понтону - шарнирно, а ко второму - жестко (WO 2008/076462 A2, E02D 25/00, 26/06/2008).
Недостатки известного крана связаны с трудностями его монтажа на месте подъема затонувшего объекта или затратами энергии на транспортировку к данному месту уже собранного крана.
Задачей изобретения является создание конструкции плавучего крана, обеспечивающей упрощенный переход из транспортного состояния в рабочее и наоборот. Технический результат заключается в повышении эффективности использования плавучего крана со снижением затрат энергии на его транспортировку к месту подъема затонувшего объекта и обратно и обеспечением возможности хранения крана в мокрых доках при ограниченном занятом пространстве.
Для решения поставленной задачи предложен плавучий кран, содержащий грузоподъемные механизмы со стрелами, стяжками, лебедками и захватными крюками, два понтона, гидравлическую станцию с гидроцилиндрами изменения состояния крана и системой управления гидроцилиндрами, при этом понтоны шарнирно соединены между собой стрелами грузоподъемных механизмов, система управления выполнена с возможностью раздвигания и сдвигания понтонов и обеспечения транспортного состояния крана, при котором понтоны находятся на минимальном удалении друг от друга и жестко соединены между собой, и рабочего состояния, при котором понтоны раздвинуты гидроцилиндрами и удерживаются стяжками и гидроцилиндрами в положении, соответствующем взаимно перпендикулярному ориентированию составных частей стрел грузоподъемных механизмов.
Решению поставленной задачи способствуют также частные существенные признаки изобретения.
Лебедки грузоподъемных механизмов стационарно установлены на одном из понтонов, а гидравлическая станция - на другом понтоне.
Стяжки между составными частями стрел соседних грузоподъемных механизмов выполнены жесткими, а стяжки между составными частями стрел одних и тех же грузоподъемных механизмов - рычажными.
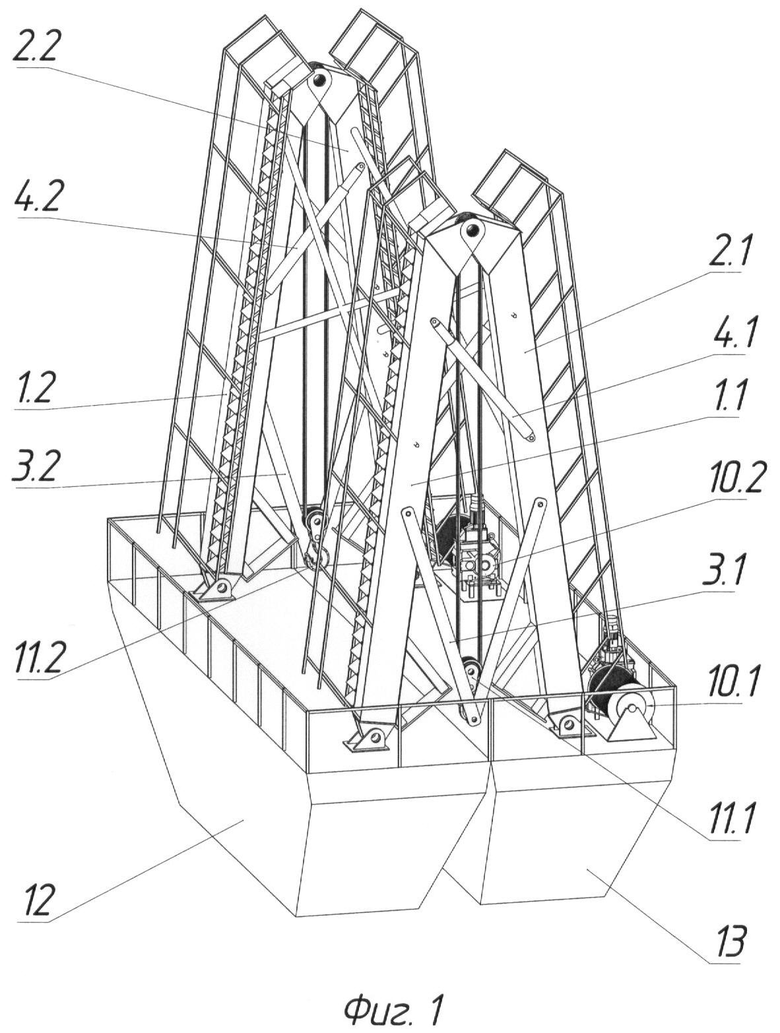
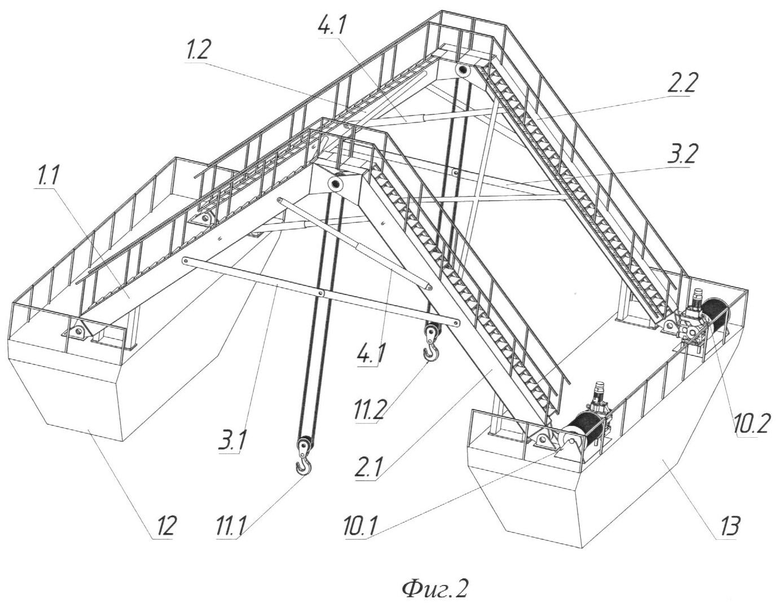
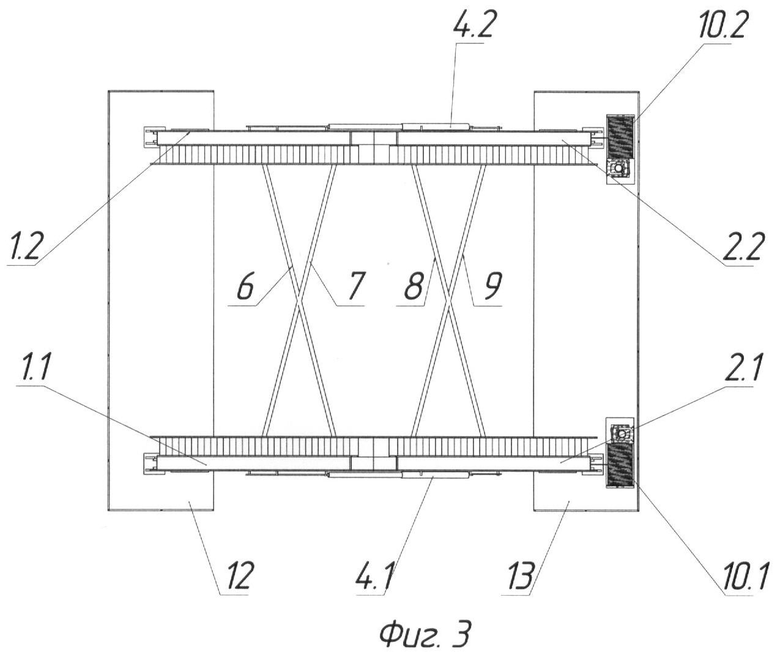
На фиг.1 и 2 показаны транспортное и рабочее состояния плавучего крана, на фиг.3 приведен его вид сверху в рабочем состоянии.
Плавучий кран содержит первый и второй грузоподъемные механизмы со стрелами, имеющими соответственно составные части 1.1, 2.1 и 1.2, 2.2, стяжками 3.1, 3.2, а также 6-9 (фиг.2), лебедками 10.1, 10.2 и захватными крюками 11.1, 11.2. Имеются понтоны 12, 13 и гидравлическая станция с гидроцилиндрами 4.1, 4.2 изменения состояния крана и системой управления гидроцилиндрами (на чертежах не показана). Понтоны 12, 13 шарнирно соединены между собой стрелами 1.1-2.1 и 2.1-2.2 грузоподъемных механизмов. Система управления выполнена с возможностью раздвигания и сдвигания понтонов 12, 13 и обеспечения транспортного состояния крана, при котором понтоны 12, 13 находятся на минимальном удалении друг от друга и жестко соединены между собой, и рабочего состояния, при котором понтоны 12, 13 раздвинуты гидроцилиндрами 4.1, 4.2 и удерживаются стяжками 3.1, 3.2 и 6-9, а также гидроцилиндрами 4.1, 4.2 в положении, соответствующем взаимно перпендикулярному ориентированию составных частей 1.1 и 2.1, и 2.1 и 2.2 стрел грузоподъемных механизмов.
Лебедки 10.1, 10.2 грузоподъемных механизмов стационарно установлены на понтоне 13, а гидравлическая станция - на понтоне 12.
Стяжки 6-9 между составными частями 1.1 и 1.2, 2.1 и 2.2 стрел соседних грузоподъемных механизмов выполнены жесткими. Стяжки 3.1 и 3.2 между составными частями стрел одних и тех же грузоподъемных механизмов выполнены рычажными.
Работа с плавучим краном осуществляется следующим образом.
При отсутствии заказов на использование кран постоянно находится в предназначенном для его хранения мокром доке. Нерабочее состояние крана, называемое транспортным, характеризуется тем, что понтоны 12, 13 находятся на минимальном удалении друг от друга и жестко соединены между собой, а составные части 1.1 и 2.1, 2.1 и 2.2 стрел придвинуты друг к другу. Это предопределяет занятие краном в доке предельно ограниченного пространства.
В случае поступления заказа о поднятии со дна водоема затонувшего объекта, например судна, и выявления ряда конкретных условий работы, таких как глубина, течение, степень заиления, тип объекта (судна), разрабатывают стратегию предстоящих работ по транспортировке крана и поднятия затонувшего объекта. Далее кран прикрепляют тросами к одному или нескольким вспомогательным морским буксирам и выводят из дока. Транспортировка крана буксирами производится все в том же его состоянии со сближенными понтонами, при этом кран перемещается по поверхности акватории как типичный катамаран.
После подхода к месту поднятия затонувшего объекта кран переводят в рабочее состояние. При этом понтоны 12, 13 гидравлической станцией раздвигают до положения, при котором составные части 1.1 и 2.1, 1.2 и 2.2 стрел грузоподъемных механизмов становятся взаимно перпендикулярны, что обеспечивает равномерное нагружение понтонов 12, 13 и их устойчивое положение на воде. Удержание крана в рабочем положении осуществляют гидроцилиндрами 4.1, 4.2 изменения состояния и стяжками 3.1, 3.2 и 6-9, а удержание крана на месте подъема затонувшего объекта постановкой на систему якорей.
Используя данные обследования затонувшего объекта, с помощью лебедок 10.1,10.2 опускают и закрепляют на объекте захватные крюки 11.1,11.2. Лебедками 10.1,10.2 плавно поднимают объект. После этого осуществляют его транспортировку к месту назначения. При этом объект транспортируют в подвесном состоянии с частичным погружением в воду.
По окончании транспортировки поднятого объекта и завершении намеченных работ кран снова переводят в транспортное состояние состояние, т.е гидроцилиндрами 4.1, 4.2 сближают понтоны 12, 13 и придвигают друг к другу составные части 1.1 и 2.1, 2.1 и 2.2 стрел. С помощью буксиров кран снова доставляют в док.
Таким образом, предложенная конструкция плавучего крана обеспечивает упрощенный переход из транспортного состояния в рабочее и наоборот. В результате имеет место эффективное использование плавучего крана со снижением затрат энергии на его транспортировку к месту подъема затонувшего объекта и обратно, а также обеспечивается возможность хранения крана в мокрых доках при ограниченном занятом пространстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2009 |
|
RU2390460C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2755358C1 |
| ПЛАВУЧЕЕ СРЕДСТВО ДЛЯ ВЫПОЛНЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ | 2011 |
|
RU2459739C1 |
| СИСТЕМА ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2018 |
|
RU2735475C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2014 |
|
RU2564271C1 |
| УСТАНОВКА ДЛЯ СБОРА ПЛАВАЮЩЕЙ И ОСЕВШЕЙ ДРЕВЕСИНЫ НА ВОДОХРАНИЛИЩАХ | 2009 |
|
RU2449916C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2012 |
|
RU2479460C1 |
| Грузоподъемное судно катамаранного типа | 1977 |
|
SU885101A1 |
| СПОСОБ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ ОБЪЕКТОВ | 2009 |
|
RU2417921C2 |
| Способ выполнения подводных подъемно-транспортных операций и устройство для его осуществления | 2015 |
|
RU2619882C2 |
Изобретение относится к буксируемым подъемным кранам катамаранного типа и предназначено для использования при осуществлении подъема со дна водоемов затонувших судов и других грузов, а также для их транспортировки в подвешенном состоянии в заданную точку. Плавучий кран содержит грузоподъемные механизмы со стрелами, лебедками и захватными крюками. Имеются два понтона и гидравлическая станция с гидроцилиндрами изменения состояния крана и системой управления гидроцилиндрами. Понтоны шарнирно соединены между собой стрелами грузоподъемных механизмов. Система управления дает возможность изменения взаимного положения понтонов для обеспечения транспортного либо рабочего состояний крана. В транспортном состоянии понтоны находятся на минимальном удалении друг от друга и жестко соединены между собой. В рабочем состоянии понтоны раздвинуты гидроцилиндрами и удерживаются стяжками и гидроцилиндрами в положении, соответствующем взаимно перпендикулярному ориентированию составных частей стрел грузоподъемных механизмов. Предложенная конструкция крана обеспечивает упрощенный переход из транспортного состояния в рабочее и наоборот. Технический результат заключается в повышении эффективности использования плавучего крана со снижением затрат энергии на его транспортировку к месту подъема затонувшего объекта и обратно и обеспечении возможности хранения крана в мокрых доках при ограниченном занятом пространстве. 2 з.п. ф-лы, 3 ил.
1. Плавучий кран, содержащий
грузоподъемные механизмы со стрелами, стяжками, лебедками и захватными крюками,
два понтона,
гидравлическую станцию с гидроцилиндрами изменения состояния крана и системой управления гидроцилиндрами, при этом
понтоны шарнирно соединены между собой стрелами грузоподъемных механизмов,
система управления выполнена с возможностью раздвигания и сдвигания понтонов для обеспечения
транспортного состояния крана, при котором понтоны находятся на минимальном удалении друг от друга и жестко соединены между собой, и
рабочего состояния, при котором понтоны раздвинуты гидроцилиндрами и удерживаются стяжками и гидроцилиндрами в положении, соответствующем взаимно перпендикулярному ориентированию составных частей стрел грузоподъемных механизмов.
2. Плавучий кран по п.1, отличающийся тем, что лебедки грузоподъемных механизмов стационарно установлены на одном из понтонов, а гидравлическая станция - на другом понтоне.
3. Плавучий кран по п.1, отличающийся тем, что стяжки между составными частями стрел соседних грузоподъемных механизмов выполнены жесткими, а стяжки между составными частями стрел одних и тех же грузоподъемных механизмов - рычажными.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| DE 20308850 U1, 02.10.2003 | |||
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2000 |
|
RU2205769C2 |
| ПЛАВУЧИЙ КРАН "КОНСТАНТИН" | 2000 |
|
RU2185997C2 |

